
Assessment of an Operational System for Crop Type Map Production Using High Temporal and Spatial Resolution Satellite Optical Imagery

 , , and
, , and
Abstract
:
1. Introduction
1.1. The Need for Crop Type Maps
1.2. Sentinel-2 for Agriculture
1.3. Previous Works
1.4. Goals of This Work
2. Materials and Methods
2.1. Data Sources
2.1.1. Satellite Imagery
- Argentina (59.617343W, 34.227771S, 3481 km), very good: Very good coverage (almost one acceptable image per week) from February to April covering the end of the summer crop season (October/November to April). Winter crops are not covered at all.
- Belgium (4.953034E, 50.635297N, 3829 km), moderate: Due to high cloudiness, the image dataset is not very rich, but has at least one acceptable image per month during the summer crop season (from March to September), covering also the end of the winter crop season.
- Burkina Faso (3.669765W, 11.257590N, 6734 km), bad: Very few images in the growing period.
- China (116.503414E, 36.817027N, 3847 km), moderate: The dataset has a high presence of aerosols in February and March. April and May are well covered, as well as the beginning of June. The end of winter crops will be well covered, and it was possible to work (not in the best conditions) with the summer crops.
- France (0.570392E, 43.628161N, 16,903 km), good: This dataset covers the end of the winter crops and the complete summer crop cycles with more than one image per month, lacking the starting of the winter crops.
- Madagascar (46.987573E, 19.641356S, 14,402 km), moderate/bad: Images were taken almost weekly for the middle end of the growing season (from the end of February to the end of April). However, many them have clouds for the eastern half of the image, where the validation data are located.
- Morocco (7.858731W, 31.476627N, 14,068 km), very good: There was very good coverage from January to June (one image approximately every 5 days).
- Pakistan (72.557226E, 31.477121N, 1199 km), bad: The dataset has at least one non-cloudy Landsat in June, one in July, one in September and one in August (June and July with some aerosols). It thus covers the beginning and the end of the growing cycle. There is no acceptable image in the period of the maximum development of the crops.
- Russia (37.917387E, 53.388181N, 3577 km), bad: Because of the presence of clouds, there were no SPOT4 (Take5) or Landsat images available. In order to keep the test site in the benchmarking, RapidEye imagery was used covering the middle end of the summer crops from the end of April to July. Only 4 images were free of clouds.
- South Africa (26.577359E, 27.381934S, 2905 km), good: Field data correspond to summer crops. The dataset provides good coverage with a good image every week, except for the beginning of the cycle (December/January).
- Ukraine (30.008751E, 50.060014N, 3593 km), moderate: April, May and June are covered, which corresponds to the end of the winter crops and the beginning of the summer crops. From December to March, there is no image due to clouds.
- USA (112.168445W, 33.027932N, 5450 km), good: There is approximately one image every 5 days from February to June, covering the middle end of the winter and the beginning to middle cycle of the summer crops. Some Landsat data complete the summer cycle with less frequency.
2.1.2. In Situ Data
2.2. Experiment Design
2.2.1. Strategy Selection
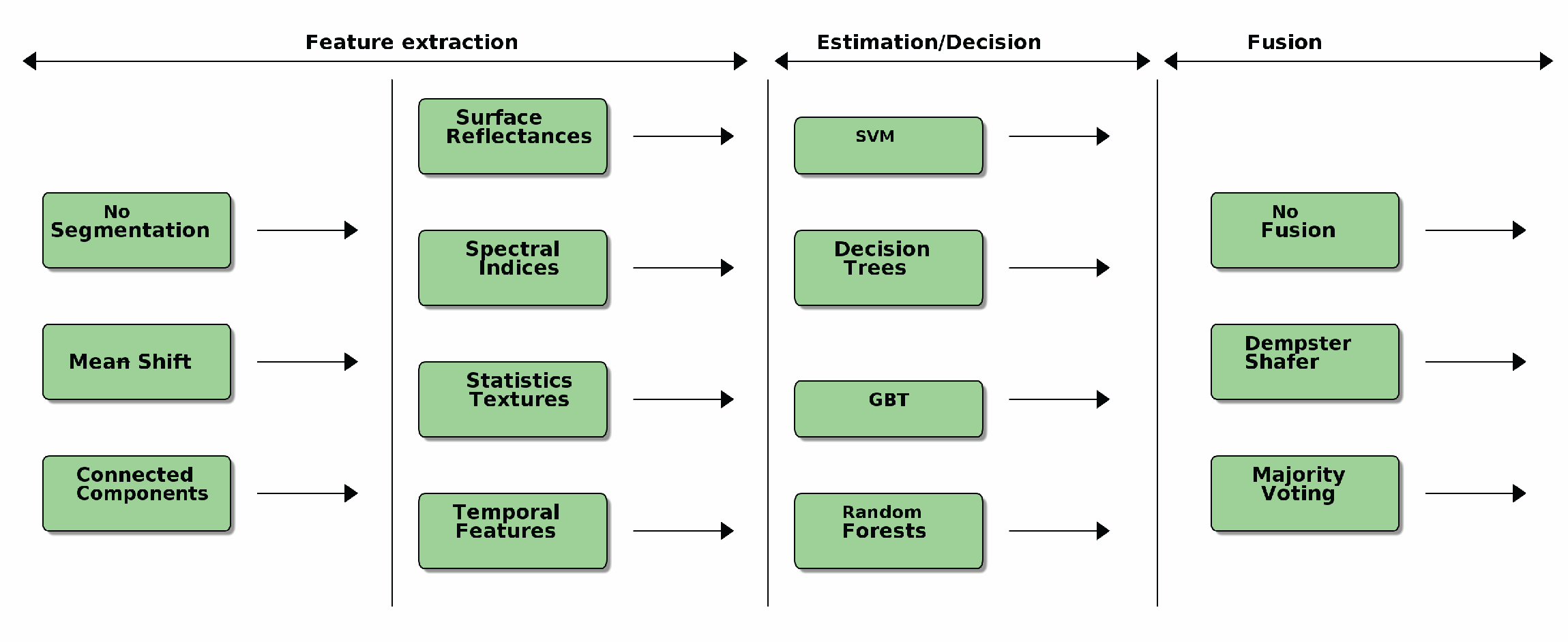
Choice of the Classification Approach
- image segmentation in the case of a region-based approach,
- feature extraction,
- classification,
- fusion or post-processing.

- Segmentation approaches were difficult to be tuned automatically for different kinds of crops and fields, resulting in errors. It was therefore decided not to use a segmentation algorithm, but rather to use the edge-preserving smoothing filtering of the first phase of the mean-shift approach [46].
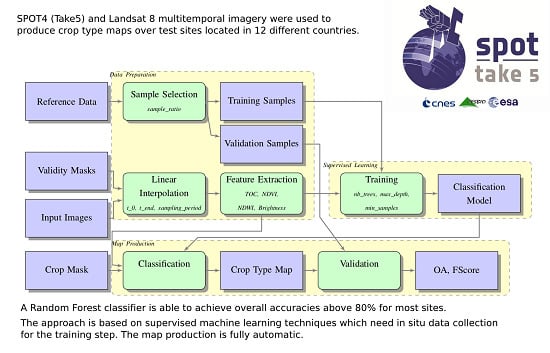
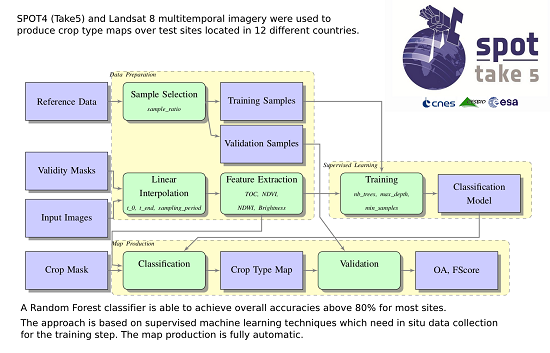
- The best trade-off between accuracy and processing time for dealing with cloudy data was to perform a temporal linear interpolation of cloudy pixels. There was no improvement in terms of classification metrics using the cubic spline interpolation.
- The most pertinent features for the classification (and therefore used for all of the experiments reported in this paper) were the surface (TOC) reflectances, the NDVI, the NDWI [47] and the brightness (defined as the Euclidean norm of the surface reflectances).
- The classifiers yielding the best performances were the random forests, followed by the gradient boosted trees and then the SVM with a RBFkernel. RF and GBT being similar approaches, only RF and SVM were selected for the benchmarking on the complete set of test sites.
Temporal Resampling

Final List of Strategies
- Random forest classifier;
- SVM classifier with an RBF kernel;
- Dempster–Shafer fusion of the previous approaches;
- Best classifier with a mean-shift smoothing;
- Best classifier with a temporal regular resampling.
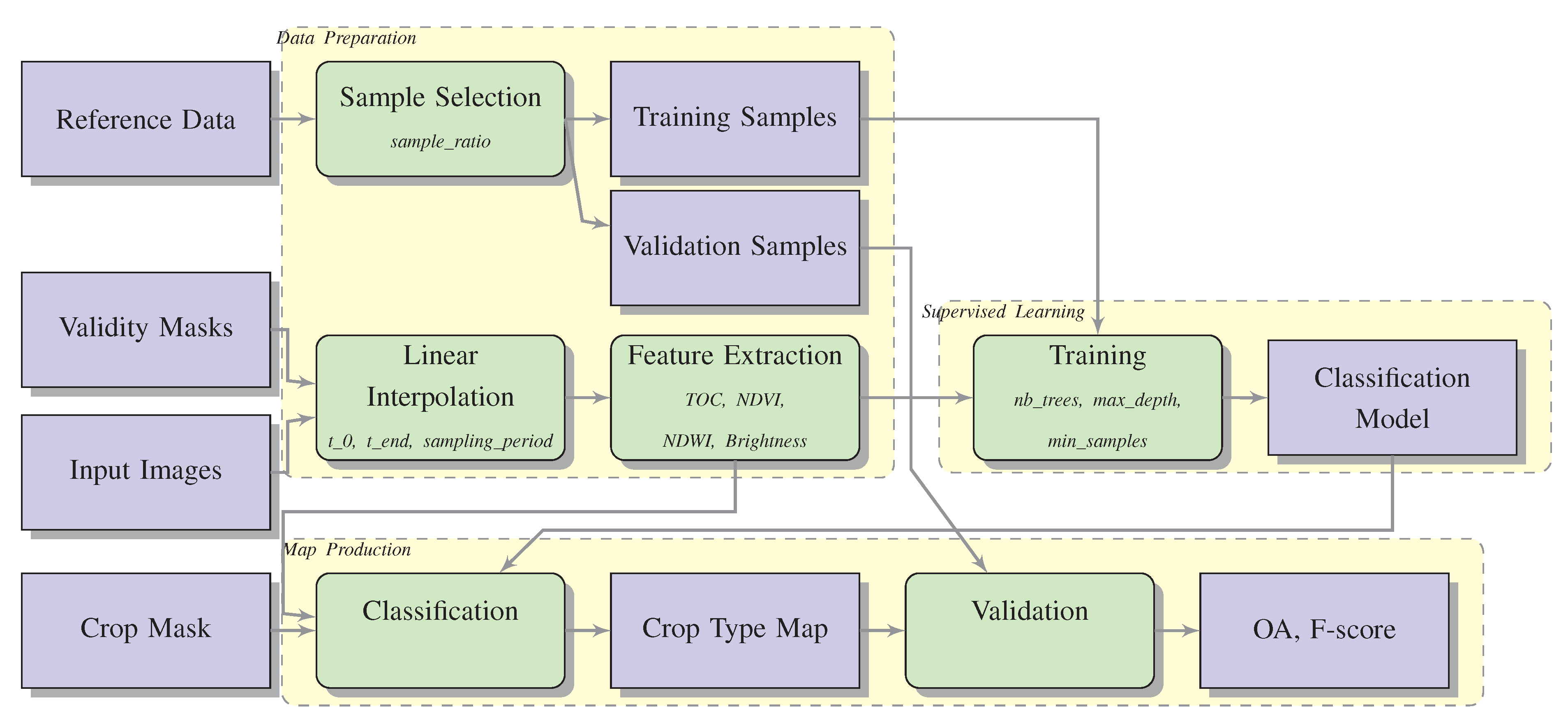
2.2.2. Experimental Setup

- The reference in situ data are split into 2 disjoint sets of polygons, one for training the classifier and the other for the validation of the produced maps. The split is made at the polygon level in order to ensure that there are no pixels from the same field in the training and the validation sets.
- The validity masks and the input surface reflectance images are used in order to produce a gap-filled time series using linear interpolation of the missing values. In the case of the temporal resampling, all time points are linearly interpolated. The optional smoothing step is applied at this stage.
- The gap-filled time series is used to compute the spectral indices (NDVI, NDWI and brightness) for each acquisition date, which are afterwards stacked with the surface reflectances in order to produce the input features for the classifier.
- The input features (time series of reflectances and spectral indices) and the crop mask (The crop mask is another of the Sentinel-2 Agriculture Project products and is assumed to be available here. It consists of a binary mask of cropland areas. The crop type classification is performed only inside the cropland areas.) are used with the classification model in order to produce the crop type map.
- The validation samples are used to produce a confusion matrix for the generated crop type map. The overall accuracy and the F-score per class are computed (see Section 2.2.3 for the details of these metrics). This validation is performed at the pixel level.
2.2.3. Quality Metrics
3. Results and Discussion
3.1. Classifier Comparison

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | OA | SVM |
|---|---|---|
| Random Forests | ||
| Argentina | 0.904 ± 0.026 | 0.898 ± 0.024 |
| Belgium | 0.822 ± 0.001 | 0.642 ± 0.020 |
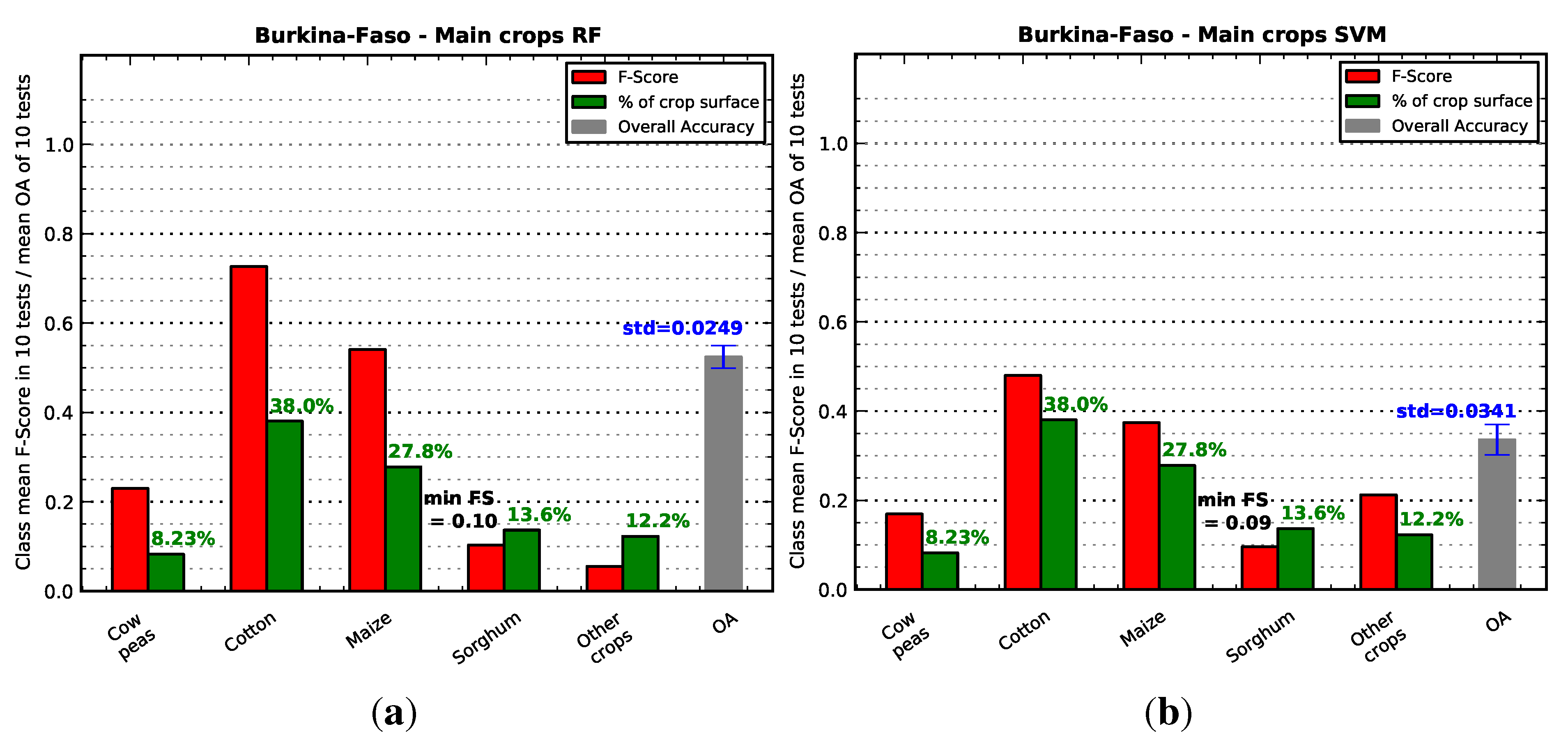
| Burkina Faso | 0.524 ± 0.018 | 0.335 ± 0.025 |
| China | 0.927 ± 0.010 | 0.876 ± 0.039 |
| France | 0.904 ± 0.004 | 0.857 ± 0.012 |
| Madagascar | 0.502 ± 0.058 | 0.338 ± 0.085 |
| Morocco | 0.879 ± 0.005 | 0.694 ± 0.024 |
| Pakistan | 0.727 ± 0.035 | 0.605 ± 0.045 |
| Russia | 0.668 ± 0.019 | 0.618 ± 0.030 |
| South Africa | 0.908 ± 0.011 | 0.904 ± 0.023 |
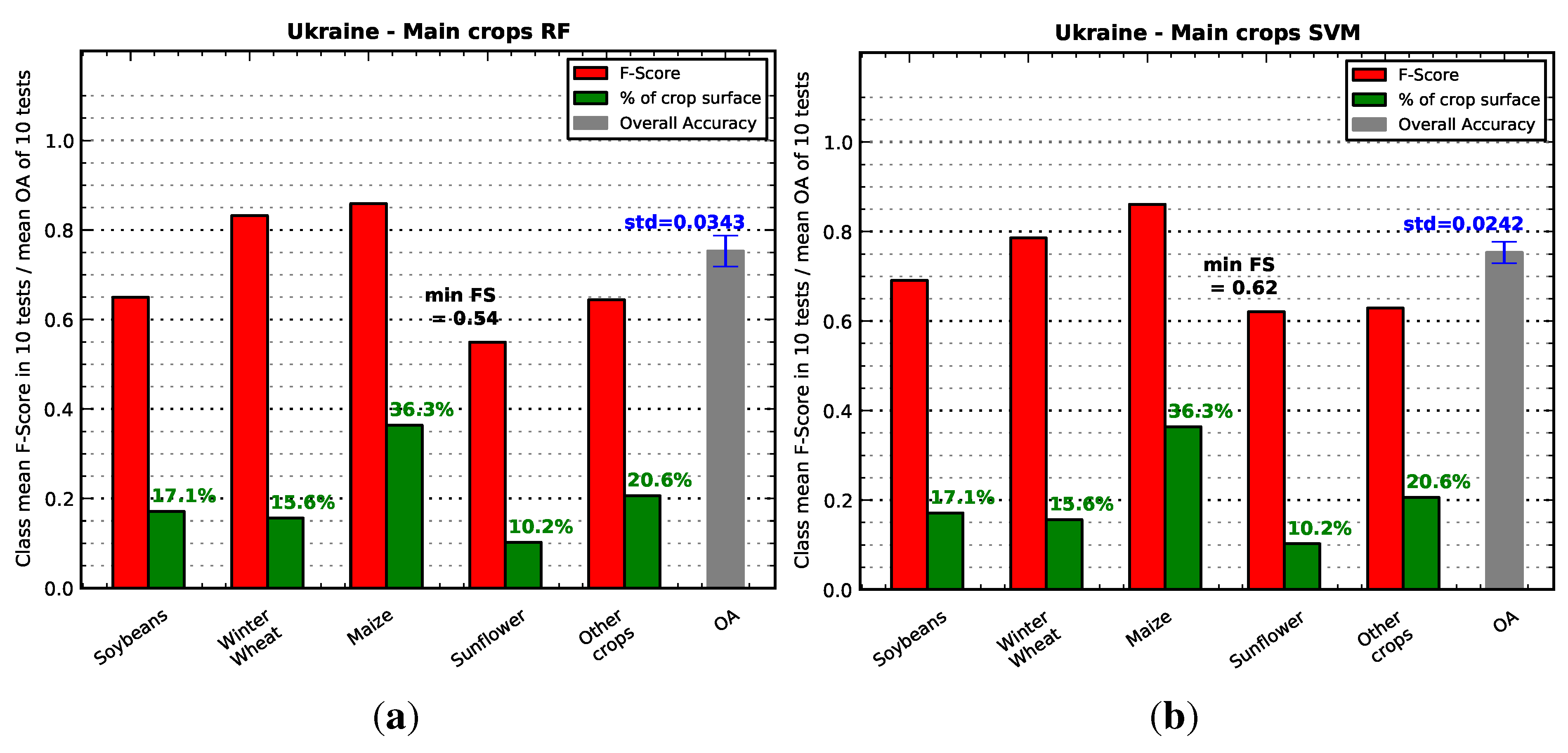
| Ukraine | 0.752 ± 0.025 | 0.753 ± 0.018 |
| USA | 0.913 ± 0.005 | 0.905 ± 0.008 |
| Site | Random Forests | Minimum | SVM | Minimum |
|---|---|---|---|---|
| Main Class | Main Class | |||
| Argentina | 0.9399 | 0.7586 | 0.9374 | 0.7304 |
| Belgium | 0.8735 | 0.6886 | 0.7030 | 0.4818 |
| Burkina Faso | 0.7266 | 0.0553 | 0.4800 | 0.0961 |
| China | 0.9616 | 0.4455 | 0.9270 | 0.4032 |
| France | 0.9310 | 0.5250 | 0.8977 | 0.5582 |
| Madagascar | 0.0488 | 0.0402 | 0.1526 | 0.1526 |
| Morocco | 0.9326 | 0.2734 | 0.7938 | 0.3680 |
| Pakistan | 0.8107 | 0.1326 | 0.7210 | 0.2212 |
| Russia | 0.8435 | 0.2237 | 0.8119 | 0.2041 |
| South Africa | 0.9542 | 0.3941 | 0.9469 | 0.4293 |
| Ukraine | 0.8589 | 0.5493 | 0.8608 | 0.6211 |
| USA | 0.9382 | 0.6859 | 0.9368 | 0.6849 |
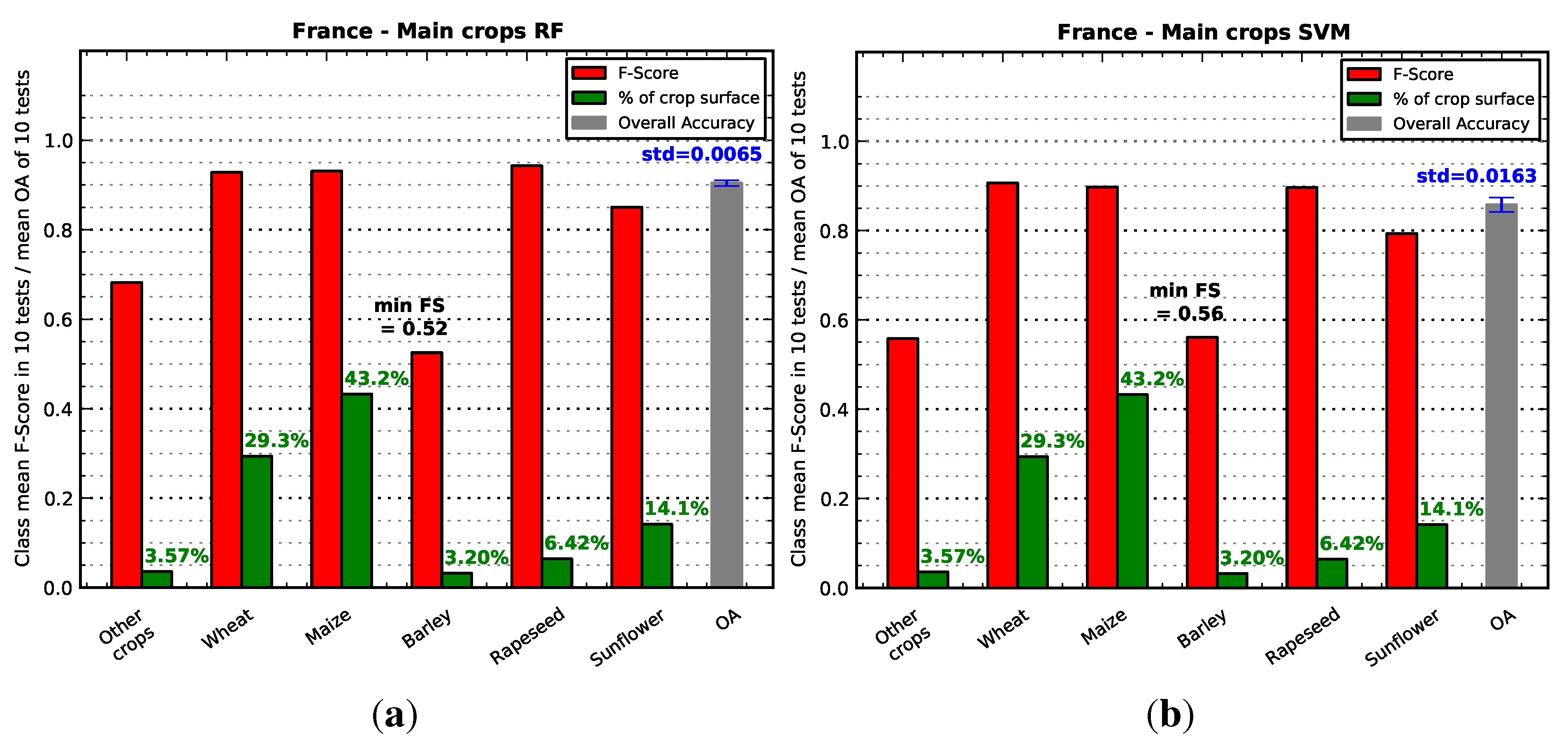
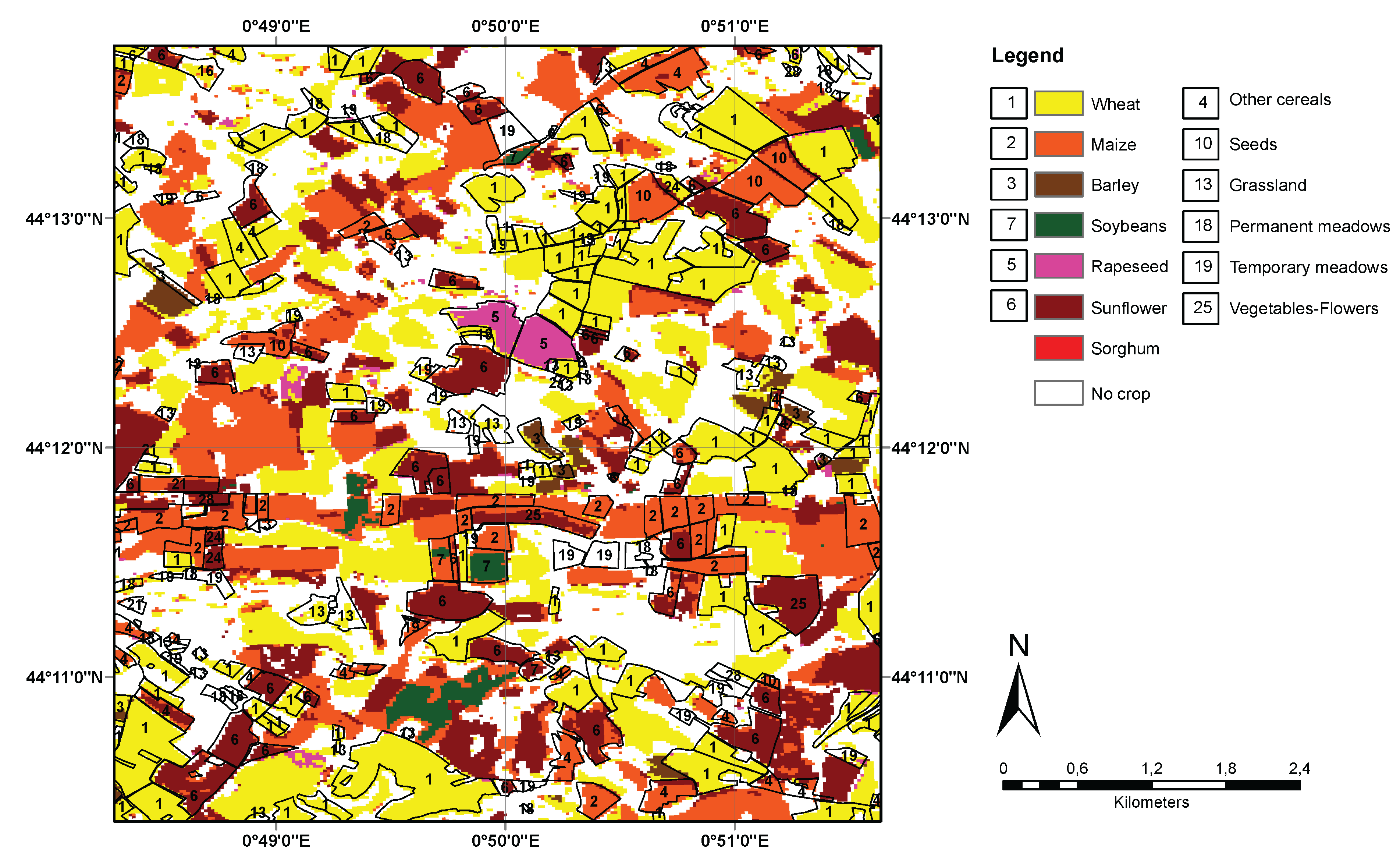
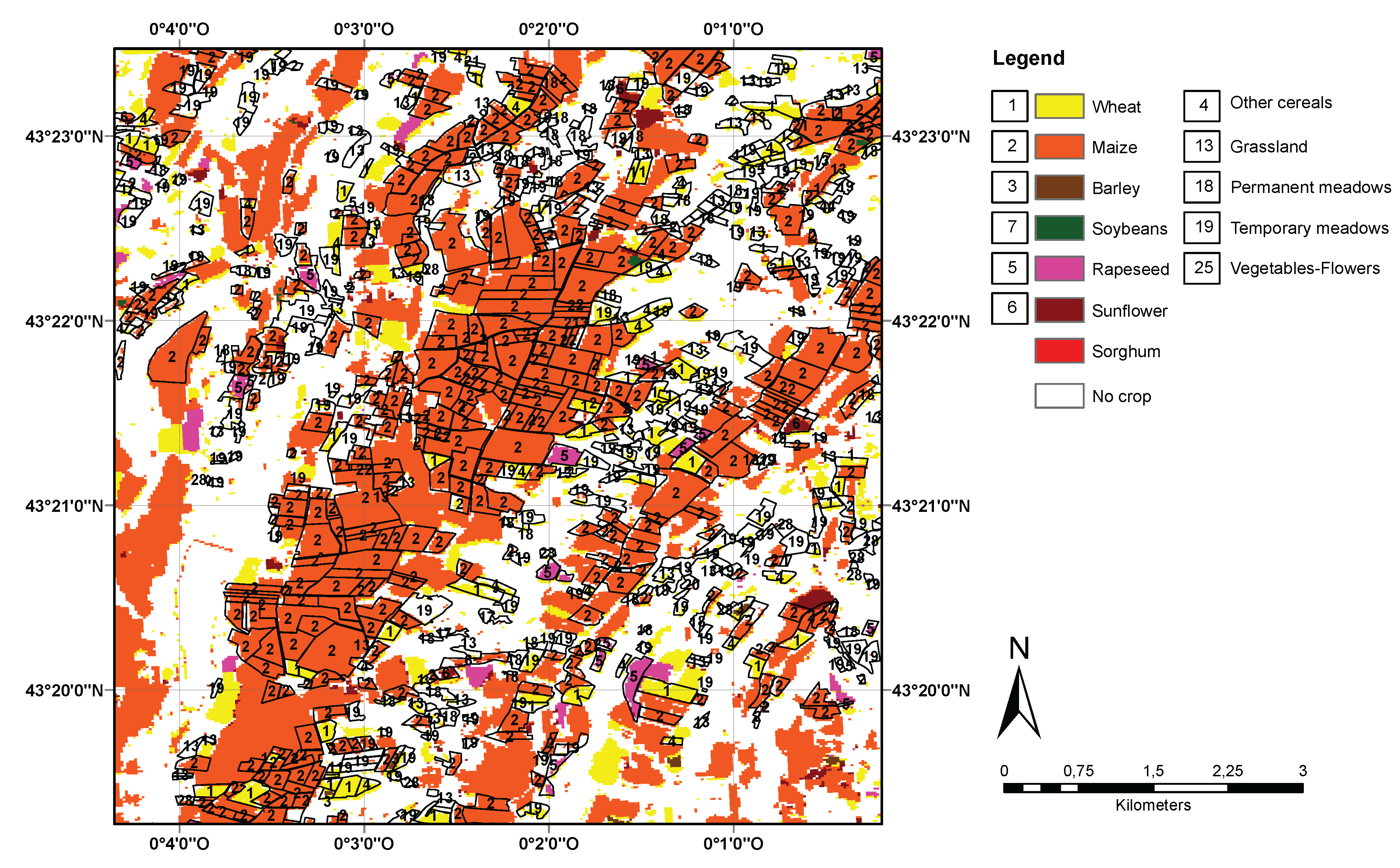
3.1.1. France

| Class | Wheat | Maize | Barley | Rapeseed | Sunflower | Other Crops |
|---|---|---|---|---|---|---|
| Wheat | 24,061 | 486 | 122 | 72 | 84 | 4 |
| Maize | 809 | 35,105 | 1 | 14 | 751 | 127 |
| Barley | 1440 | 21 | 920 | 21 | 9 | 0 |
| Rapeseed | 317 | 108 | 18 | 5018 | 42 | 3 |
| Sunflower | 345 | 1777 | 24 | 8 | 10,008 | 30 |
| Other Crops | 19 | 1044 | 0 | 0 | 358 | 1692 |
| Class | Wheat | Maize | Barley | Rapeseed | Sunflower | Other Crops |
|---|---|---|---|---|---|---|
| Wheat | 21,536 | 524 | 1893 | 594 | 178 | 112 |
| Maize | 951 | 31,027 | 98 | 273 | 2786 | 1671 |
| Barley | 804 | 9 | 1498 | 110 | 15 | 9 |
| Rapeseed | 212 | 78 | 172 | 4971 | 26 | 35 |
| Sunflower | 210 | 1446 | 130 | 111 | 9654 | 683 |
| Other Crops | 17 | 570 | 11 | 7 | 440 | 2049 |


3.1.2. Ukraine

| Class | Maize | Soybeans | Winter Wheat | Sunflower | Other Crops |
|---|---|---|---|---|---|
| Maize | 53,662 | 2741 | 44 | 626 | 312 |
| Soybeans | 8127 | 19,476 | 188 | 1465 | 1460 |
| Winter Wheat | 89 | 100 | 26,702 | 59 | 2003 |
| Sunflower | 3577 | 3868 | 171 | 8426 | 2724 |
| Other Crops | 2538 | 3162 | 7896 | 1020 | 19,225 |
| Class | Maize | Soybeans | Winter Wheat | Sunflower | Other Crops |
|---|---|---|---|---|---|
| Maize | 52,811 | 3575 | 69 | 1014 | 893 |
| Soybeans | 6166 | 21,706 | 382 | 1810 | 1248 |
| Winter Wheat | 50 | 164 | 24,429 | 80 | 4490 |
| Sunflower | 2683 | 3957 | 183 | 10,168 | 1987 |
| Other Crops | 2494 | 2788 | 7896 | 746 | 19,655 |
3.1.3. Burkina Faso

| Class | Maize | Sorghum | Cow Peas | Cotton | Other Crops |
|---|---|---|---|---|---|
| Maize | 155 | 21 | 3 | 56 | 1 |
| Sorghum | 62 | 9 | 3 | 38 | 1 |
| Cow Peas | 30 | 9 | 12 | 21 | 1 |
| Cotton | 44 | 10 | 3 | 262 | 0 |
| Other Crops | 48 | 11 | 15 | 25 | 3 |
| Class | Maize | Sorghum | Cow Peas | Cotton | Other Crops |
|---|---|---|---|---|---|
| Maize | 108 | 25 | 11 | 21 | 68 |
| Sorghum | 44 | 10 | 10 | 12 | 39 |
| Cow Peas | 21 | 4 | 12 | 6 | 32 |
| Cotton | 103 | 24 | 15 | 115 | 1 |
| Other Crops | 30 | 7 | 18 | 7 | 39 |

3.2. Temporal Resampling
| Site | OA | OA | p-Value |
|---|---|---|---|
| Original | Resampled | ||
| Argentina | 0.904 ± 0.026 | 0.893 ± 0.028 | 0.120 |
| Belgium | 0.816 ± 0.001 | 0.816 ± 0.001 | 0.312 |
| Burkina Faso | 0.522 ± 0.018 | 0.503 ± 0.018 | 0.122 |
| China | 0.927 ± 0.010 | 0.911 ± 0.031 | 0.193 |
| France | 0.904 ± 0.004 | 0.905 ± 0.004 | 0.770 |
| Madagascar | 0.501 ± 0.058 | 0.498 ± 0.070 | 0.818 |
| Morocco | 0.876 ± 0.004 | 0.875 ± 0.009 | 0.771 |
| Pakistan | 0.727 ± 0.035 | 0.723 ± 0.036 | 0.684 |
| Russia | 0.665 ± 0.019 | 0.665 ± 0.019 | 0.947 |
| South Africa | 0.907 ± 0.011 | 0.894 ± 0.015 | 0.023 |
| Ukraine | 0.740 ± 0.025 | 0.724 ± 0.024 | 0.019 |
| U.S.-Maricopa | 0.911 ± 0.006 | 0.911 ± 0.006 | 0.939 |
3.3. Smoothing and Fusion
4. Conclusions
Supplementary Files
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Foley, J.A.; Ramankutty, N.; Brauman, K.A.; Cassidy, E.S.; Gerber, J.S.; Johnston, M.; Mueller, N.D.; O’Connell, C.; Ray, D.K.; West, P.C.; et al. Solutions for a Cultivated Planet. Nature 2011, 478, 337–342. [Google Scholar] [CrossRef] [PubMed]
- Godfray, H.C.J.; Beddington, J.R.; Crute, I.R.; Haddad, L.; Lawrence, D.; Muir, J.F.; Pretty, J.; Robinson, S.; Thomas, S.M.; Toulmin, C. Food Security: The Challenge of Feeding 9 Billion People. Science 2010, 327, 812–818. [Google Scholar] [CrossRef] [PubMed]
- Rounsevell, M.; Ewert, F.; Reginster, I.; Leemans, R.; Carter, T. Future Scenarios of European Agricultural Land Use. Agric. Ecosyst. Environ. 2005, 107, 117–135. [Google Scholar] [CrossRef]
- Searchinger, T.; Heimlich, R.; Houghton, R.A.; Dong, F.; Elobeid, A.; Fabiosa, J.; Tokgoz, S.; Hayes, D.; Yu, T.H. Use of US Croplands for Biofuels Increases Greenhouse Gases through Emissions from Land-Use Change. Science 2008, 319, 1238–1240. [Google Scholar] [CrossRef] [PubMed]
- Green, R.E.; Cornell, S.J.; Scharlemann, J.P.W.; Balmford, A. Farming and the Fate of Wild Nature. Science 2005, 307, 550–555. [Google Scholar] [CrossRef] [PubMed]
- Tilman, D. Forecasting Agriculturally Driven Global Environmental Change. Science 2001, 292, 281–284. [Google Scholar] [CrossRef] [PubMed]
- Benayas, J.M.R.; Bullock, J.M. Restoration of Biodiversity and Ecosystem Services on Agricultural Land. Ecosystems 2012, 15, 883–899. [Google Scholar] [CrossRef] [Green Version]
- Schwilch, G.; Bestelmeyer, B.; Bunning, S.; Critchley, W.; Herrick, J.; Kellner, K.; Liniger, H.; Nachtergaele, F.; Ritsema, C.; Schuster, B.; et al. Experiences in Monitoring and Assessment of Sustainable Land Management. Land Degrad. Dev. 2010, 22, 214–225. [Google Scholar] [CrossRef]
- Drusch, M.; Bello, U.D.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: Esa’s Optical High-Resolution Mission for Gmes Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Sentinel-2 for Agriculture. Available online: http://www.esa-sen2agri.org/ (accessed on 18 September 2015).
- Committee on Earth Observation Satellites. CEOS Acquisition Strategy for GEOGLAM Phase 1. Available online: http://ceos.org/document_management/Ad_Hoc_Teams/GEOGLAM/GEOGLAM_CEOS-Acquisition-Strategy-for-GEOGLAM-Phase-1_Nov2013.pdf (accessed on 18 September 2015).
- JECAM. Available online: http://www.jecam.org/ (accessed on 18 September 2015).
- Hagolle, O.; Sylvander, S.; Huc, M.; Claverie, M.; Clesse, D.; Dechoz, C.; Lonjou, V.; Poulain, V. SPOT4 (Take5): Simulation of Sentinel-2 Time Series on 45 Large sites. Remote Sens. 2015. Accept. [Google Scholar]
- Roy, D.; Wulder, M.; Loveland, T.; Woodcock, C.E.; Allen, R.; Anderson, M.; Helder, D.; Irons, J.; Johnson, D.; Kennedy, R.; et al. Landsat-8: Science and Product Vision for Terrestrial Global Change Research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Salmon, J.; Friedl, M.A.; Frolking, S.; Wisser, D.; Douglas, E.M. Global Rain-Fed, Irrigated, and Paddy Croplands: A New High Resolution Map Derived From Remote Sensing, Crop Inventories and Climate Data. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 321–334. [Google Scholar] [CrossRef]
- Fritz, S.; See, L.; McCallum, I.; You, L.; Bun, A.; Moltchanova, E.; Duerauer, M.; Albrecht, F.; Schill, C.; Perger, C.; et al. Mapping Global Cropland and Field Size. Glob. Chang. Biol. 2015, 21, 1980–1992. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Defourny, P.; Vancutsem, C.; Bicheron, P.; Brockmann, C.; Nino, F.; Schouten, L.; Leroy, M. GlobCover: A 300 m global land cover product for 2005 using ENVISAT MERIS time series. In Proceedings of the ISPRS Commission VII Symposium Remote Sensing: From Pixels to Processes, Enschede, The Netherlands, 8–11 May 2006.
- Friedl, M.A.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Huang, X. MODIS Collection 5 global land cover: Algorithm refinements and characterization of new datasets, 2001-2012, Collection 5.1 IGBP Land Cover. Boston University: Boston, MA, USA.
- Townshend, J.R.; Masek, J.G.; Huang, C.; Vermote, E.F.; Gao, F.; Channan, S.; Sexton, J.O.; Feng, M.; Narasimhan, R.; Kim, D.; et al. Global Characterization and Monitoring of Forest Cover Using Landsat Data: Opportunities and Challenges. Int. J. Digit. Earth 2012, 5, 373–397. [Google Scholar] [CrossRef]
- Whitcraft, A.; Becker-Reshef, I.; Justice, C. A Framework for Defining Spatially Explicit Earth Observation Requirements for a Global Agricultural Monitoring Initiative (GEOGLAM). Remote Sens. 2015, 7, 1461–1481. [Google Scholar] [CrossRef]
- Whitcraft, A.; Becker-Reshef, I.; Killough, B.; Justice, C. Meeting Earth Observation Requirements for Global Agricultural Monitoring: An Evaluation of the Revisit Capabilities of Current and Planned Moderate Resolution Optical Earth Observing Missions. Remote Sens. 2015, 7, 1482–1503. [Google Scholar] [CrossRef]
- Banskota, A.; Kayastha, N.; Falkowski, M.J.; Wulder, M.A.; Froese, R.E.; White, J.C. Forest Monitoring Using Landsat Time Series Data: A Review. Can. J. Remote Sens. 2014, 40, 362–384. [Google Scholar] [CrossRef]
- Badhwar, G. Classification of Corn and Soybeans Using Multitemporal Thematic Mapper Data. Remote Sens. Environ. 1984, 16, 175–181. [Google Scholar] [CrossRef]
- Murthy, C.S.; Raju, P.V.; Badrinath, K.V.S. Classification of Wheat Crop with Multi-Temporal Images: Performance of Maximum Likelihood and Artificial Neural Networks. Int. J. Remote Sens. 2003, 24, 4871–4890. [Google Scholar] [CrossRef]
- Brown, J.C.; Kastens, J.H.; Coutinho, A.C.; de Castro Victoria, D.; Bishop, C.R. Classifying multiyear agricultural land use data from Mato Grosso using time-series MODIS vegetation index data. Remote Sens. Environ. 2013, 130, 39–50. [Google Scholar] [CrossRef]
- Wardlow, B.D.; Egbert, S.L. Large-area crop mapping using time-series MODIS 250 m NDVI data: An assessment for the U.S. Central Great Plains. Remote Sens. Environ. 2008, 112, 1096–1116. [Google Scholar] [CrossRef]
- Lobell, D.B.; Asner, G.P. Cropland distributions from temporal unmixing of MODIS data. Remote Sens. Environ. 2004, 93, 412–422. [Google Scholar] [CrossRef]
- Ozdogan, M. The spatial distribution of crop types from MODIS data: Temporal unmixing using Independent Component Analysis. Remote Sens. Environ. 2010, 114, 1190–1204. [Google Scholar] [CrossRef]
- Verbeiren, S.; Eerens, H.; Piccard, I.; Bauwens, I.; Orshoven, J.V. Sub-Pixel Classification of Spot-Vegetation Time Series for the Assessment of Regional Crop Areas in Belgium. Int. J. Appl. Earth Observ. Geoinf. 2008, 10, 486–497. [Google Scholar]
- Hansen, M.C.; Egorov, A.; Roy, D.P.; Potapov, P.; Ju, J.; Turubanova, S.; Kommareddy, I.; Loveland, T.R. Continuous Fields of Land Cover for the Conterminous United States Using Landsat Data: First Results From the Web-Enabled Landsat Data (weld) Project. Remote Sens. Lett. 2011, 2, 279–288. [Google Scholar] [CrossRef]
- Zhong, L.; Gong, P.; Biging, G.S. Efficient Corn and Soybean Mapping with Temporal Extendability: A Multi-Year Experiment Using Landsat Imagery. Remote Sens. Environ. 2014, 140, 1–13. [Google Scholar] [CrossRef]
- Wu, B.; Gommes, R.; Zhang, M.; Zeng, H.; Yan, N.; Zou, W.; Zheng, Y.; Zhang, N.; Chang, S.; Xing, Q.; et al. Global Crop Monitoring: A Satellite-Based Hierarchical Approach. Remote Sensing 2015, 7, 3907–3933. [Google Scholar] [CrossRef]
- Theia Land Data Centre. Available online: https://www.theia-land.fr/en/products/spot4-take5 (accessed on 18 September 2015).
- Centre d’Etudes Spatiales de la BIOsphere. Available online: http://www.cesbio.ups-tlse.fr/ (accessed on 18 September 2015).
- Geoglam crop monitor. Available online: http://www.geoglam-crop-monitor.org/index.php (accessed on 18 September 2015).
- AMIS. Available online: http://www.amis-outlook.org (accessed on 18 September 2015).
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A Comparison of Pixel-Based and Object-Based Image Analysis with Selected Machine Learning Algorithms for the Classification of Agricultural Landscapes Using Spot-5 Hrg Imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J. An Assessment of the Effectiveness of a Random Forest Classifier for Land-Cover Classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Burges, C.J. A tutorial on support vector machines for pattern recognition. Data Min. Knowl. Discov. 1998, 2, 121–167. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.; Olshen, R.; Stone, C. Classification and Regression Trees; Taylor and Francis: New York, NY, USA.
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Orfeo Toolbox. Available online: http://www.orfeo-toolbox.org/ (accessed on 18 September 2015).
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Powers, D.M. Evaluation: From Precision, Recall and F-Measure to ROC, Informedness, Markedness and Correlation. J. Mach. Lear. Technol. 2011, 1, 37–63. [Google Scholar]
- Commaniciu, D. Mean Shift: A Robust Approach toward Feature Space Analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Gao, B.C. NDWI. A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Smets, P. What is Dempster-Shafer’s model? In Advances in the Dempster-Shafer Theory of Evidence; John Wiley & Sons, Inc.: New York, NY, USA, 1994; pp. 5–34. [Google Scholar]
- Xu, L.; Krzyzak, A.; Suen, C.Y. Methods of Combining Multiple Classifiers and Their Applications To Handwriting Recognition. IEEE Trans. Syst. Man Cybern. 1992, 22, 418–435. [Google Scholar] [CrossRef]
- Sokolova, M.; Lapalme, G. A Systematic Analysis of Performance Measures for Classification Tasks. Inf. Process. Manag. 2009, 45, 427–437. [Google Scholar] [CrossRef]
- Klemens, B. Modeling with Data: Tools and Techniques for Scientific Computing; Princeton University Press: Princeton, NJ, USA, 2008. [Google Scholar]
- Jackson, S. Research Methods and Statistics: A Critical Thinking Approach; Cengage Learning: Boston, MA, USA, 2015. [Google Scholar]
- Foody, G.M. Classification Accuracy Comparison: Hypothesis Tests and the Use of Confidence Intervals in Evaluations of Difference, Equivalence and Non-Inferiority. Remote Sens. Environ. 2009, 113, 1658–1663. [Google Scholar] [CrossRef]
- Processing Chain for Crop type Map Production. Available online: http://tully.ups-tlse.fr/ariasm/croptype_bench/ (accessed on 18 September 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Inglada, J.; Arias, M.; Tardy, B.; Hagolle, O.; Valero, S.; Morin, D.; Dedieu, G.; Sepulcre, G.; Bontemps, S.; Defourny, P.; et al. Assessment of an Operational System for Crop Type Map Production Using High Temporal and Spatial Resolution Satellite Optical Imagery. Remote Sens. 2015, 7, 12356-12379. https://doi.org/10.3390/rs70912356
Inglada J, Arias M, Tardy B, Hagolle O, Valero S, Morin D, Dedieu G, Sepulcre G, Bontemps S, Defourny P, et al. Assessment of an Operational System for Crop Type Map Production Using High Temporal and Spatial Resolution Satellite Optical Imagery. Remote Sensing. 2015; 7(9):12356-12379. https://doi.org/10.3390/rs70912356
Chicago/Turabian StyleInglada, Jordi, Marcela Arias, Benjamin Tardy, Olivier Hagolle, Silvia Valero, David Morin, Gérard Dedieu, Guadalupe Sepulcre, Sophie Bontemps, Pierre Defourny, and et al. 2015. "Assessment of an Operational System for Crop Type Map Production Using High Temporal and Spatial Resolution Satellite Optical Imagery" Remote Sensing 7, no. 9: 12356-12379. https://doi.org/10.3390/rs70912356