
Flash Flood Monitoring with an Inclined Lidar Installed at a River Bank: Proof of Concept


Abstract
:
1. Introduction
2. Background
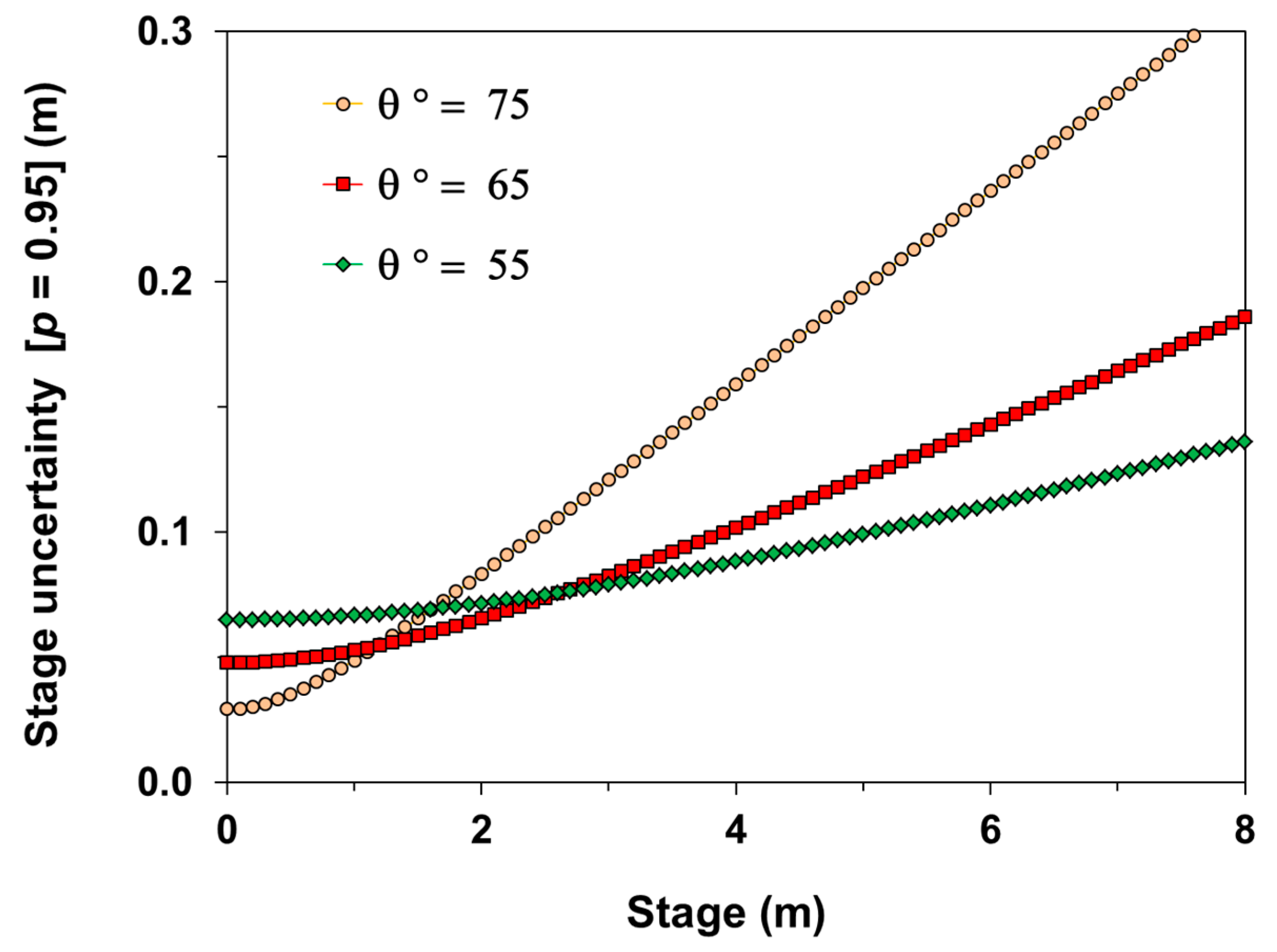
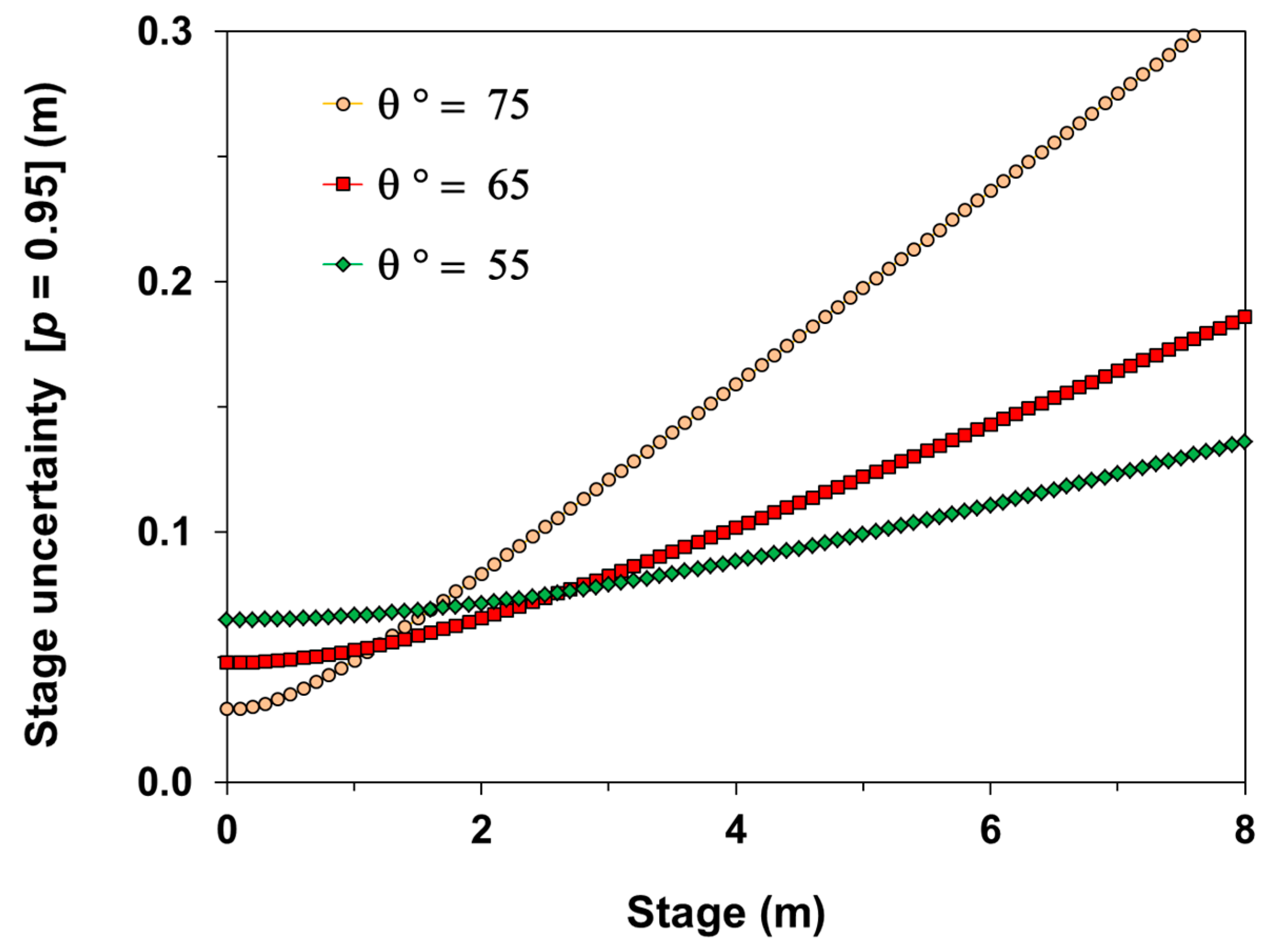
2.1. Stage Estimation
2.2. One-Point Calibration
3. Materials and Methods
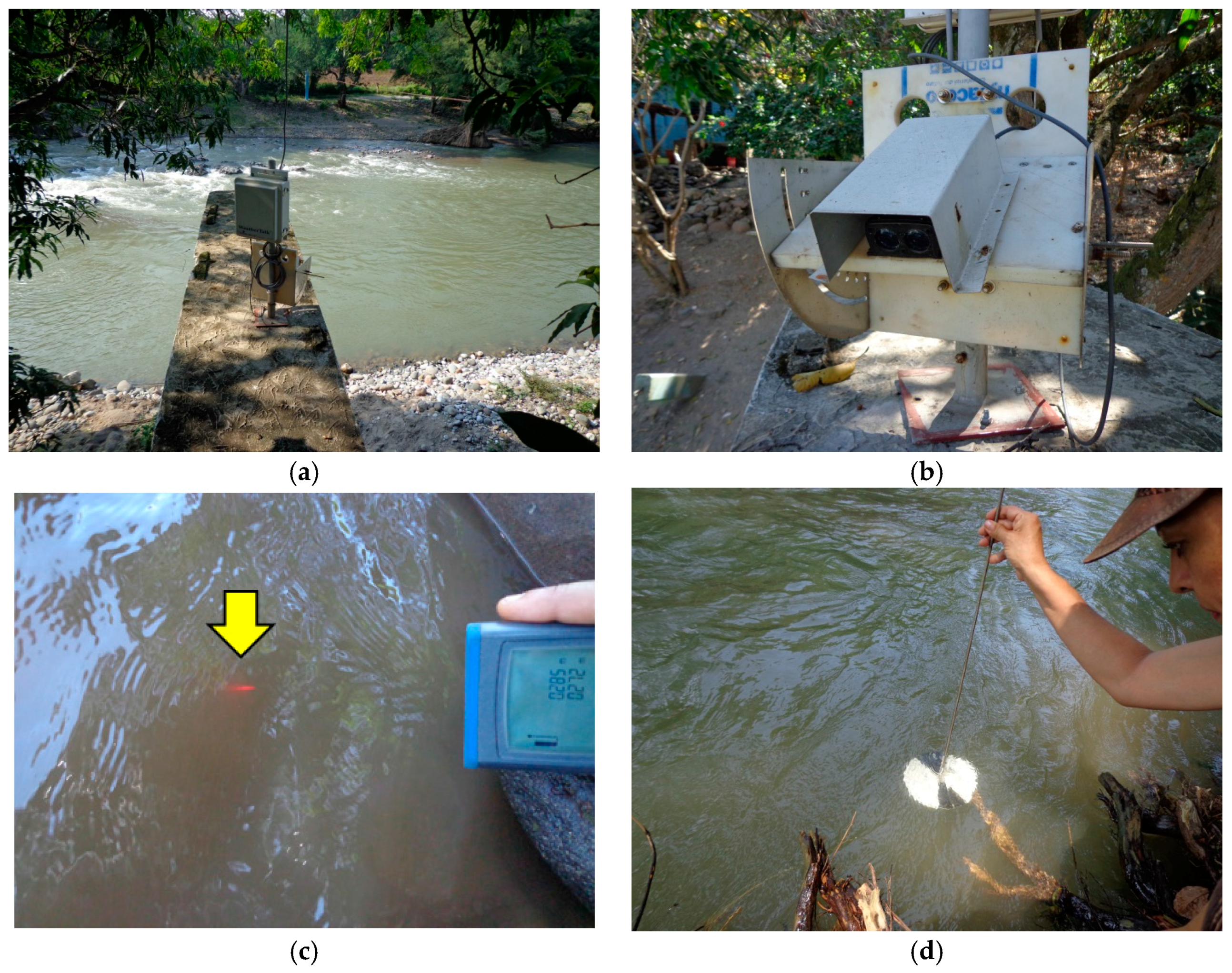
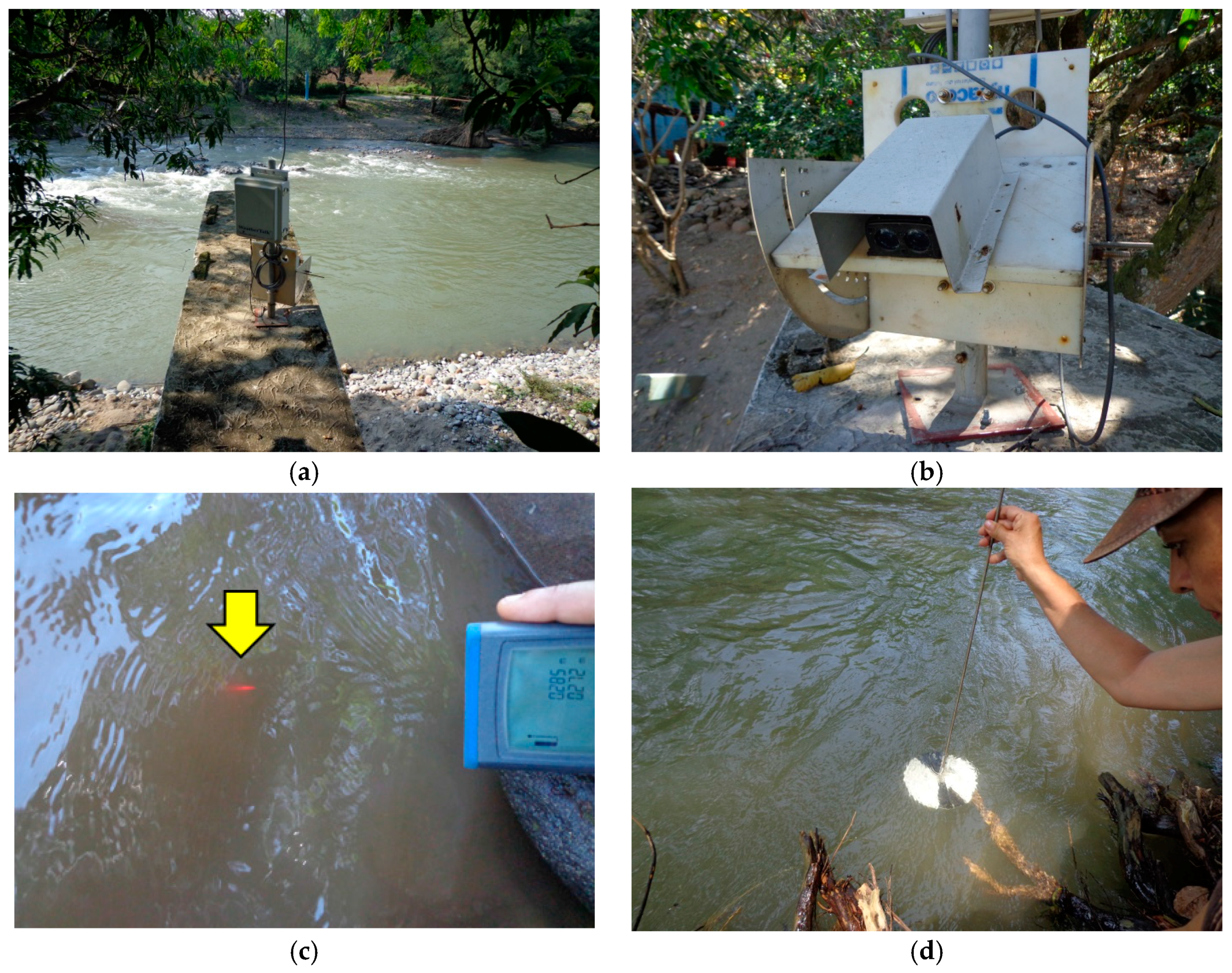
3.1. Test Lidar
3.2. Monitoring Campaign
4. Results
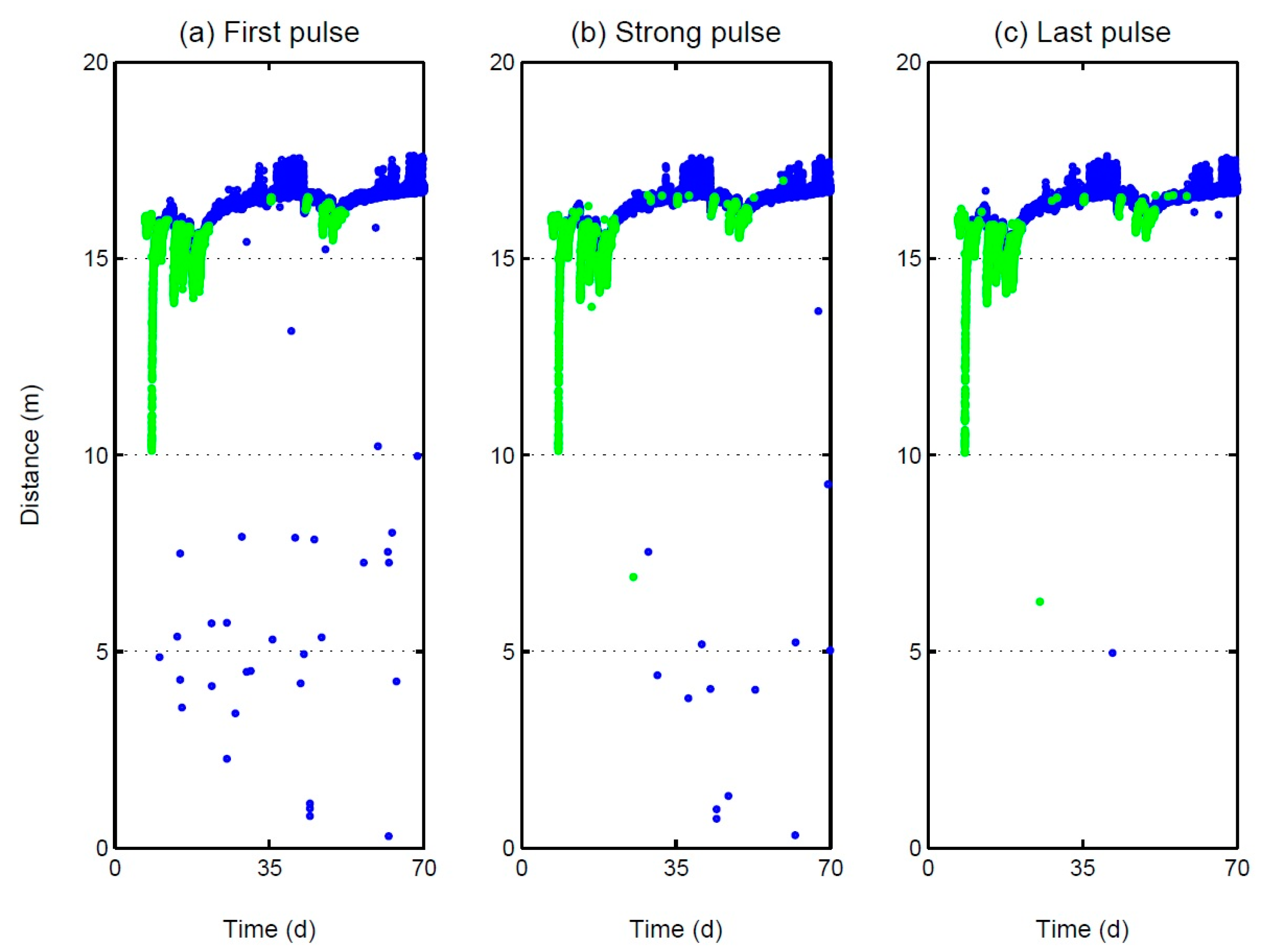
4.1. Raw-Data Processing
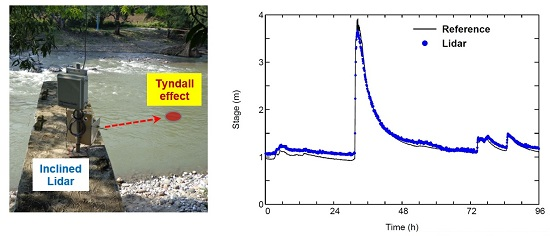
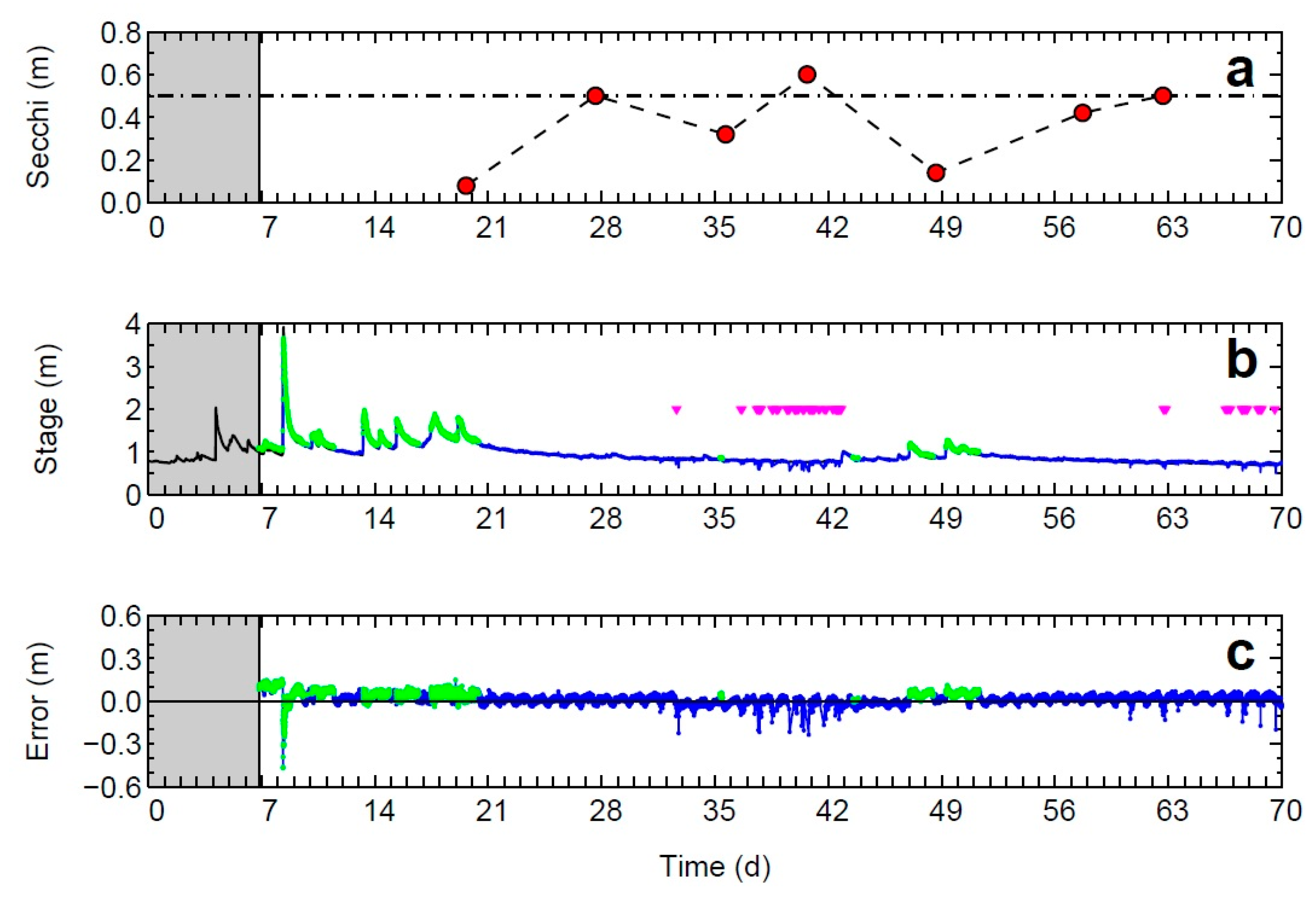
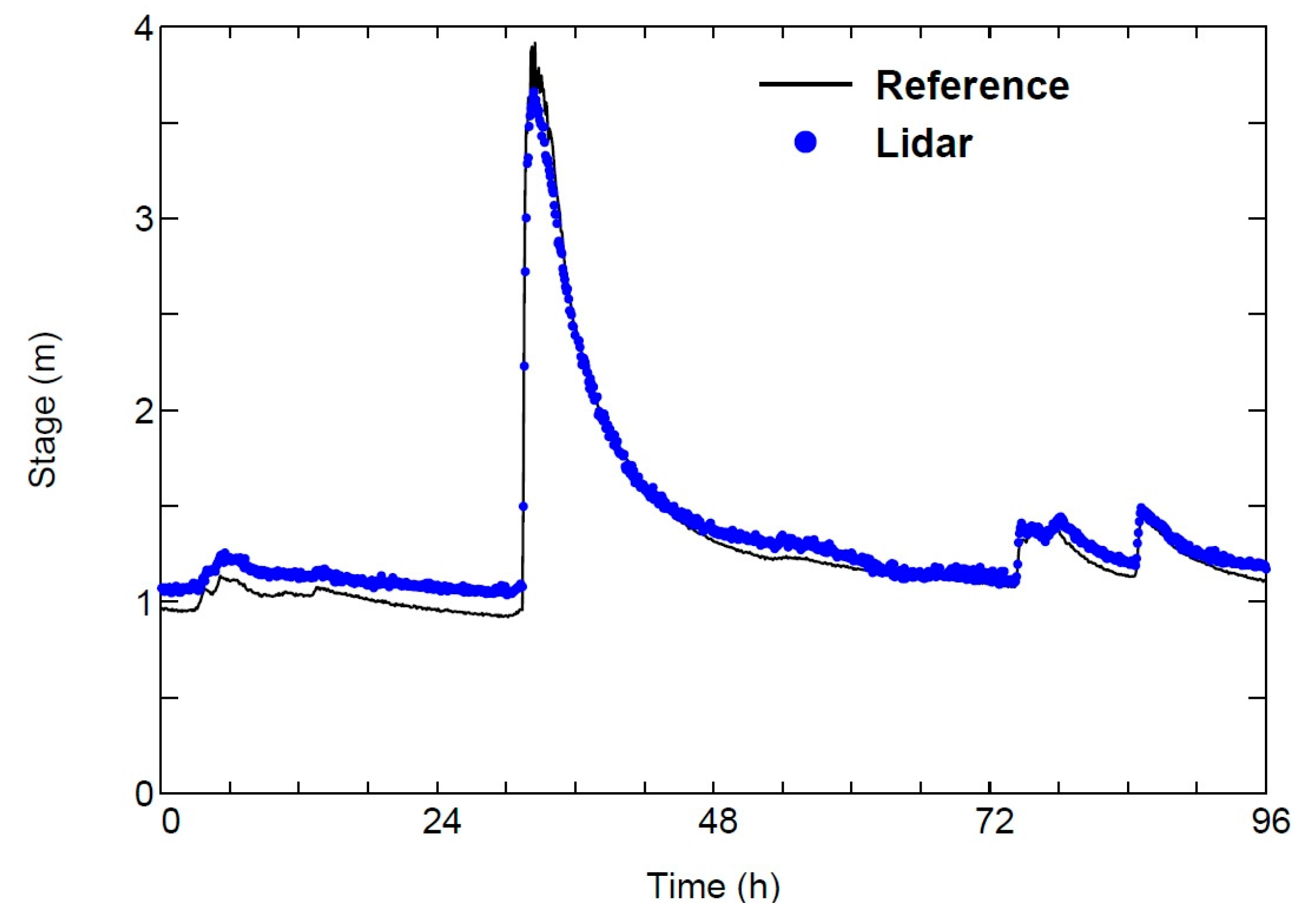
4.2. Stage Estimations
5. Concluding Remarks
5.1. Where Could an Inclined Lidar Be Used to Monitor Flash Floods?
5.2. What Is the Potential Interest of Detecting a Water (Sub) Surface with an Inclined Lidar?
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Unexplained Lidar Returns Associated with a Low Signal Strength

Appendix B. Can an Inclined Lidar Be Used to Estimate Water Turbidity?
References
- Jonkman, S.N. Global perspectives on loss of human life caused by floods. Nat. Hazards 2005, 34, 151–175. [Google Scholar] [CrossRef]
- Borga, M.; Stoffel, M.; Marchi, L.; Marra, F.; Jakob, M. Hydrogeomorphic response to extreme rainfall in headwater systems: Flash floods and debris flows. J. Hydrol. 2014, 518, 194–205. [Google Scholar] [CrossRef]
- Hill, C.; Verjee, F.; Barrett, C. Flash Flood Early Warning System Reference Guide; University Corporation for Atmospheric Research: Boulder, CO, USA, 2010. [Google Scholar]
- Hall, J.; Arheimer, B.; Borga, M.; Brázdil, R.; Claps, P.; Kiss, A.; Kjeldsen, T.R.; Kriaučiuniene, J.; Kundzewicz, Z.W.; Lang, M.; et al. Understanding flood regime changes in Europe: A state of the art assessment. Hydrol. Earth Syst. Sci. 2014, 18, 2735–2772. [Google Scholar] [CrossRef] [Green Version]
- Sauer, V.B.; Turnipseed, D.P. Stage Measurement at Gaging Stations; U.S. Geological Survey: Reston, VA, USA, 2010.
- Tamari, S.; Sánchez, G.; Magos-Hernández, J.; López, E. Monitoreo del tirante en ríos: Prueba a medio plazo con sistemas de burbujeo y Radares. Tecnología y Ciencias del Agua 2016. in preparation. [Google Scholar]
- Mishra, A.K.; Coulibaly, P. Developments in hydrometric network design: A review. Rev. Geophys. 2009, 47. [Google Scholar] [CrossRef]
- Basha, E.; Rus, D. Design of early warning flood detection systems for developing countries. In Proceedings of the Information and Communication Technologies and Development (ICTD 2007), Bangalore, India, 15–16 December 2007; pp. 1–10.
- Fritz, H.M.; Phillips, D.A.; Okayasu, A.; Shimozono, T.; Liu, H.; Mohammed, F.; Skanavis, V.; Synolakis, C.E.; Takahashi, T. The 2011 Japan tsunami current velocity measurements from survivor videos at Kesennuma Bay using Lidar. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef]
- Le Boursicaud, R.; Pénard, L.; Hauet, A.; Thollet, F.; Le Coz, J. Gauging extreme floods on YouTube: Application of LSPIV to home movies for the post-event determination of stream discharges. Hydrol. Process. 2016, 30, 90–105. [Google Scholar] [CrossRef]
- Bechle, A.J.; Wu, C.H.; Liu, W.C.; Kimura, N. Development and application of an automated river-estuary discharge imaging system. J. Hydraul. Eng. 2012, 138, 327–339. [Google Scholar] [CrossRef]
- Stumpf, A.; Augereau, E.; Delacourt, C.; Bonnier, J. Photogrammetric discharge monitoring of small tropical mountain rivers: A case study at Rivière des Pluies, Réunion Island. Water Resour. Res. 2016, 52, 4550–4570. [Google Scholar] [CrossRef]
- Plant, W.J.; Keller, W.C.; Hayes, K. Measurement of river surface currents with coherent microwave systems. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1242–1257. [Google Scholar] [CrossRef]
- Welber, M.; Le Coz, J.; Laronne, J.B.; Zolezzi, G.; Zamler, D.; Dramais, G.; Hauet, A.; Salvaro, M. Field assessment of noncontact stream gauging using portable surface velocity Radars (SVR). Water Resour. Res. 2016, 52, 1108–1126. [Google Scholar] [CrossRef]
- Tamari, S.; Garcia, F.; Arciniega-Ambrocio, J.I.; Porter, A. Laboratory and Field Testing of a Handheld Radar to Measure the Water Velocity at the Surface of Channels. Available online: http:// www.imta.gob.mx/biblioteca/libros_html/laboratory-field-testing/laboratory-field-testing.pdf (accessed on 12 October 2016).
- Tamari, S.; Guerrero-Meza, V.; Rifad, Y.; Bravo-Inclán, L.; Sánchez-Chávez, J.J. Stage monitoring in turbid reservoirs with an inclined terrestrial near-infrared Lidar. Remote Sens. 2016. Acceptation or Rejection.. [Google Scholar]
- JCGM. Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement (JCGM 100:2008); Working Group 1 of the Joint Committee for Guides in Metrology (JCGM/WG1): Paris, France, 2008. [Google Scholar]
- Laser Technology Inc. True Sense S200 Series: User’s Manual, 7th ed.; Laser Technology Inc. (LTI): Centennial, CO, USA, 2014. [Google Scholar]
- Davies-Colley, R.J.; Smith, D.G. Turbidity, suspended sediment, and water clarity: A review. JAWRA 2001, 37, 1085–1101. [Google Scholar]
- Leopold, L.B.; Maddock, T., Jr. The Hydraulic Geometry of Stream Channels and Some Physiographic Implications; U.S. Geological Survey: Reston, VA, USA, 1953.
- Lenzi, M.A.; Marchi, L. Suspended sediment load during floods in a small stream of the Dolomites (northeastern Italy). Catena 2000, 39, 267–282. [Google Scholar] [CrossRef]
- Gao, P.; Nearing, M.A.; Commons, M. Suspended sediment transport at the instantaneous and event time scales in semiarid watersheds of southeastern Arizona, USA. Water Resour. Res. 2013, 49, 6857–6870. [Google Scholar] [CrossRef]
- Cohen, H.; Laronne, J.B. High rates of sediment transport by flashfloods in the Southern Judean Desert, Israel. Hydrol. Process. 2005, 19, 1687–1702. [Google Scholar] [CrossRef]
- Marsh, L.B.; Heckman, D.B. Open Channel Flowmeter Utilizing Surface Velocity and Lookdown Level Devices. U.S. Patent 5,811,688, 22 September 1998. [Google Scholar]
- Palmer, S.C.J.; Pelevin, V.V.; Goncharenko, I.; Kovács, A.W.; Zlinszky, A.; Présing, M.; Horváth, H.; Nicolás-Perea, V.; Balzter, H.; Tóth, V.R. Ultraviolet fluorescence Lidar (UFL) as a measurement tool for water quality parameters in turbid lake conditions. Remote Sens. 2013, 5, 4405–4422. [Google Scholar] [CrossRef] [Green Version]
- ISO. Hydrometry—Suspended Sediment in Streams and Canals—Determination of Concentration by Surrogate Techniques (ISO 11657:2014); International Organization for Standardization (ISO): Geneva, Switzerland, 2014. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Numbers of attempts (every 5 min) to detect the water (sub) surface | Failed | 3272 (15%) |
| Succeeded | 18,820 (85%) | |
| Difference between the successful stage estimations by the inclined Lidar and the reference data (m) | Mean difference (b) | 0.018 |
| Standard deviation (s) | 0.034 | |
| Symmetric coverage interval 1 | ±0.077 | |
| Minimum difference | −0.470 | |
| Maximum difference | 0.153 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tamari, S.; Guerrero-Meza, V. Flash Flood Monitoring with an Inclined Lidar Installed at a River Bank: Proof of Concept. Remote Sens. 2016, 8, 834. https://doi.org/10.3390/rs8100834
Tamari S, Guerrero-Meza V. Flash Flood Monitoring with an Inclined Lidar Installed at a River Bank: Proof of Concept. Remote Sensing. 2016; 8(10):834. https://doi.org/10.3390/rs8100834
Chicago/Turabian StyleTamari, Serge, and Vicente Guerrero-Meza. 2016. "Flash Flood Monitoring with an Inclined Lidar Installed at a River Bank: Proof of Concept" Remote Sensing 8, no. 10: 834. https://doi.org/10.3390/rs8100834