
Modeling and Reconstruction of Time Series of Passive Microwave Data by Discrete Fourier Transform Guided Filtering and Harmonic Analysis

Abstract
:1. Introduction
2. The Time Series Analysis Procedure
2.1. General
2.2. Discrete Fourier Transform of a Time Series
2.3. The Two Properties of Discrete Fourier Transform
- (1)
- Linearity: If f(ti) is the weighted sum of two component time series, then the DFT of f(ti), i.e., x(n), is also the weighted sum of the DFTs of two component time series.
- (2)
- Multiplicative: If f(ti) is the product of two time series, i.e., g(ti) and h(ti), then the DFT of f(ti), i.e., x(n), is the convolution of the DFTs of two component time series as:
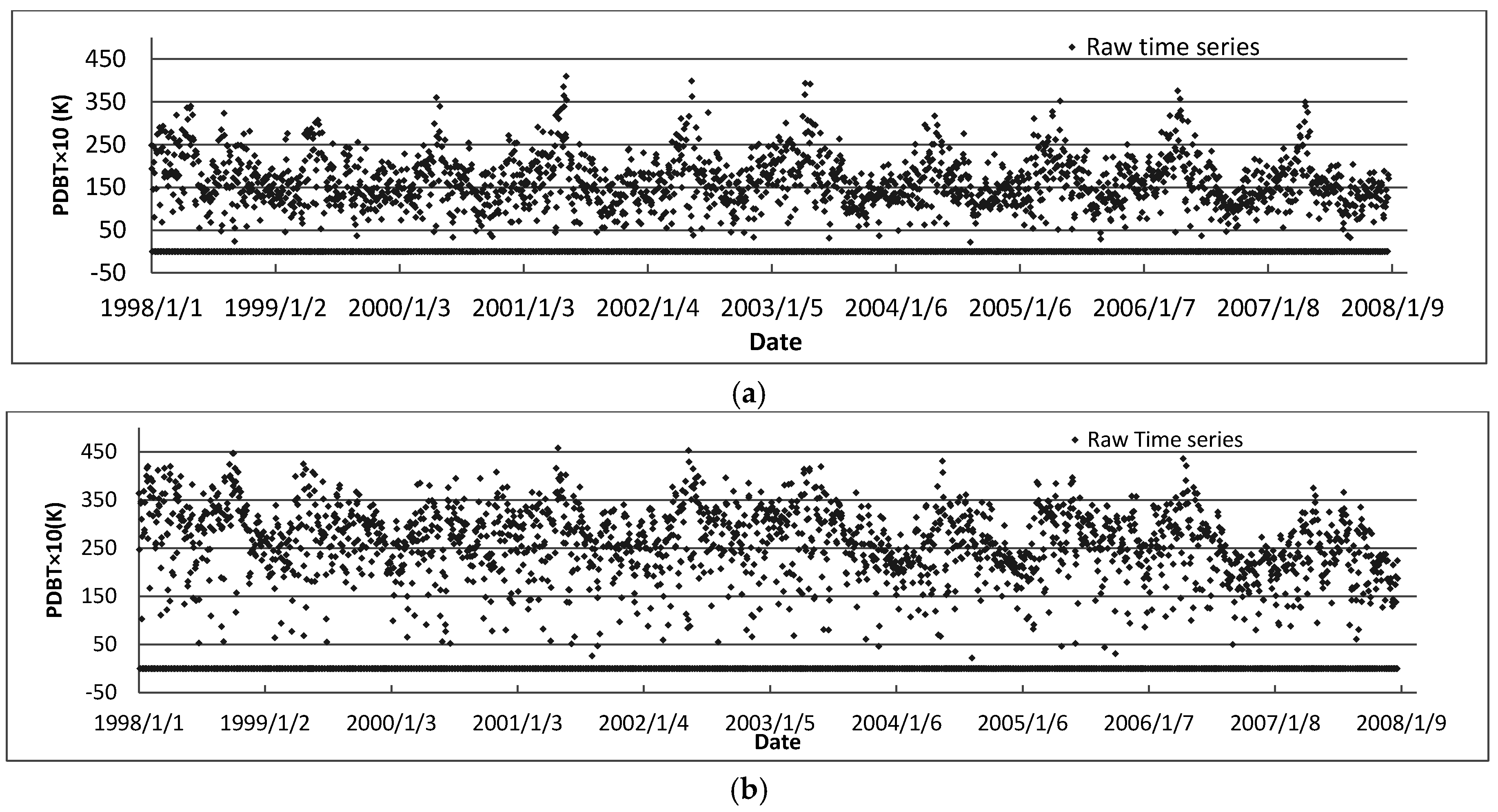
2.4. Numerical Model of a Time Series of Daily PDBT Space-Borne Observations
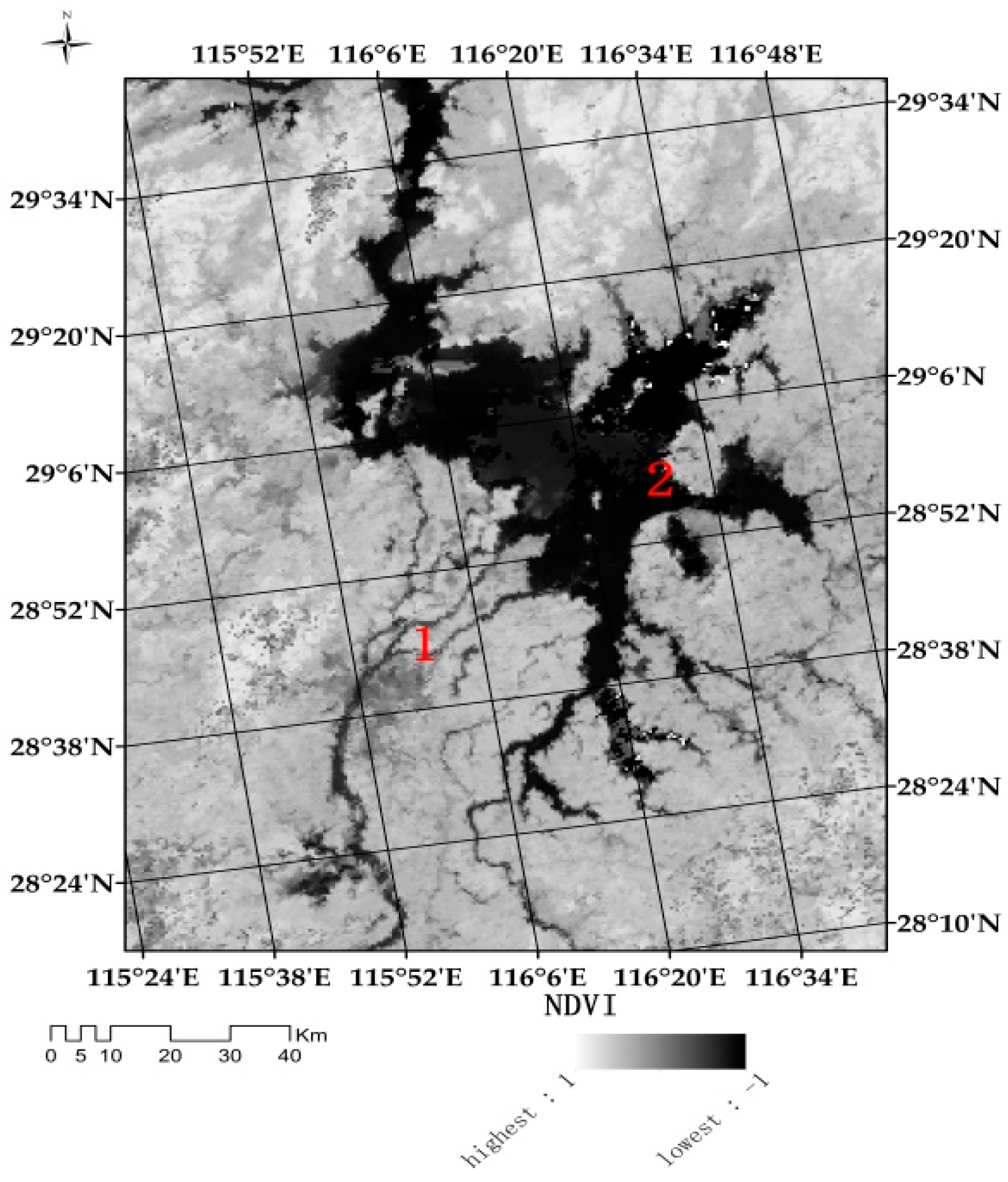
3. The Study Area and Data Set
4. Implementation of the Time Series Analysis Procedure
- 1
- Identify the frequency range of observation gaps and errors.
- 2
- Remove the observation gaps and errors with a boxcar filter.
- 3
- Identify the harmonic components associated with the surface signal.
- 4
- Extract the surface signal from the filtered PDBT time series with the HANTS algorithm.
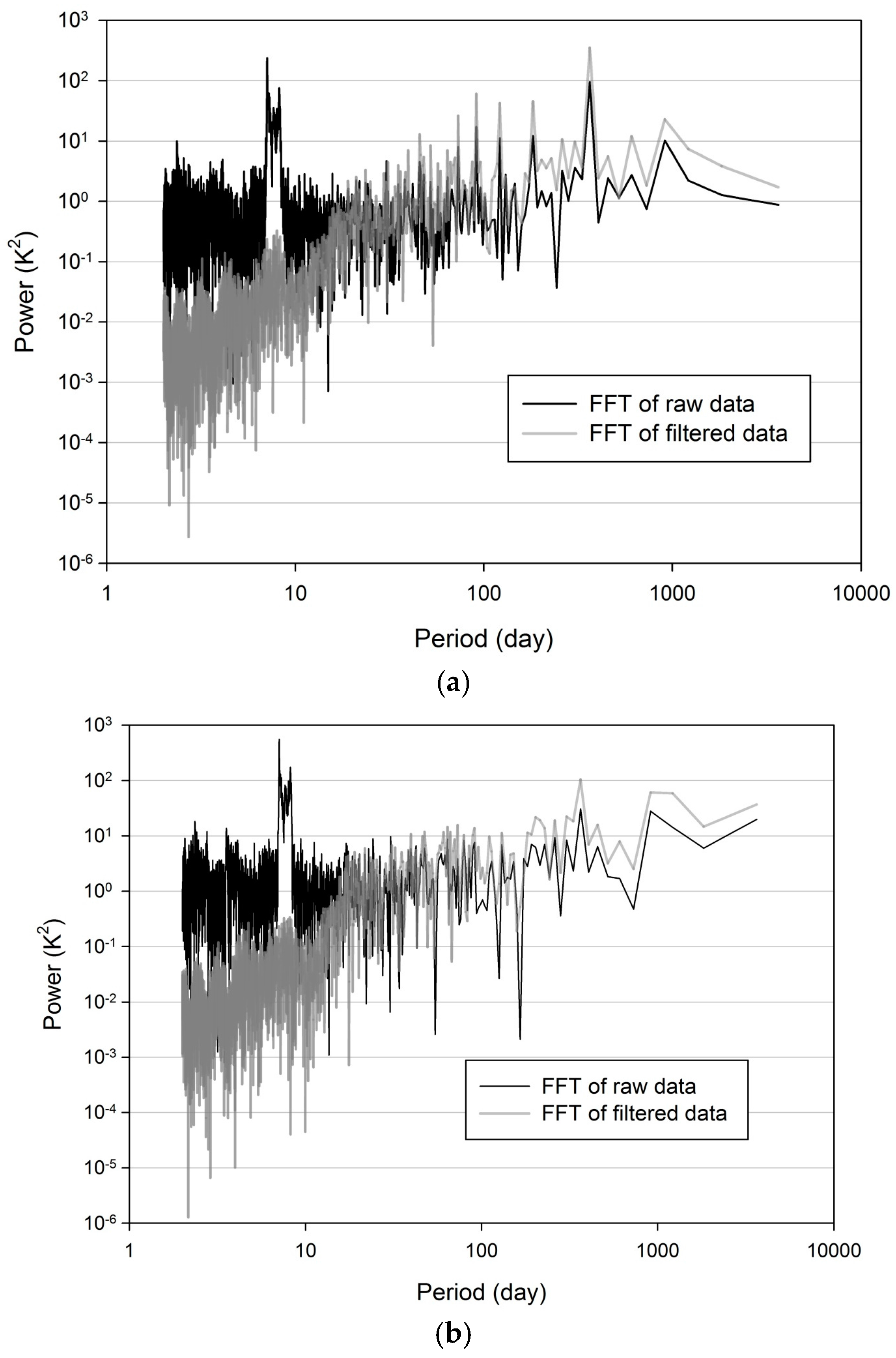
4.1. The Frequency Range of Observation Gaps and Errors
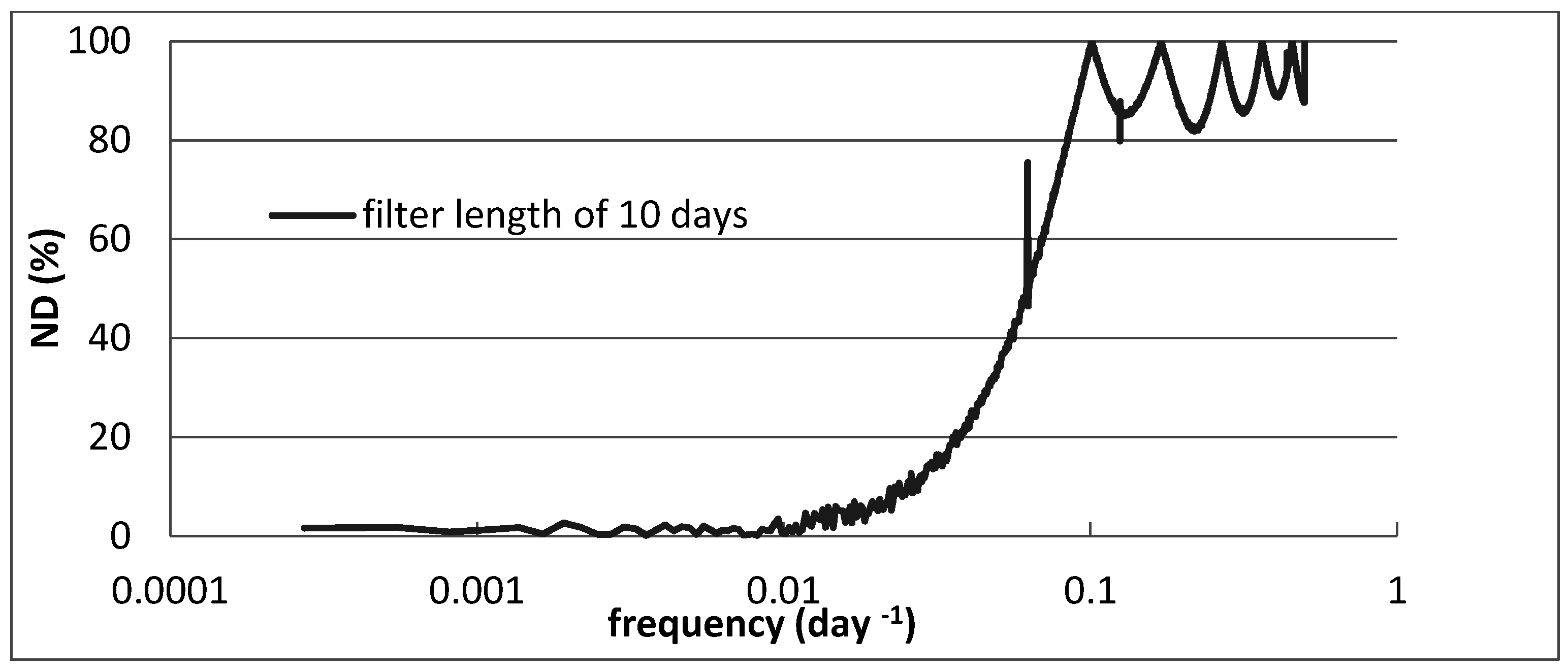
4.2. The Modified Boxcar Filter and Its Transfer Function
4.2.1. The Modified Boxcar Filter
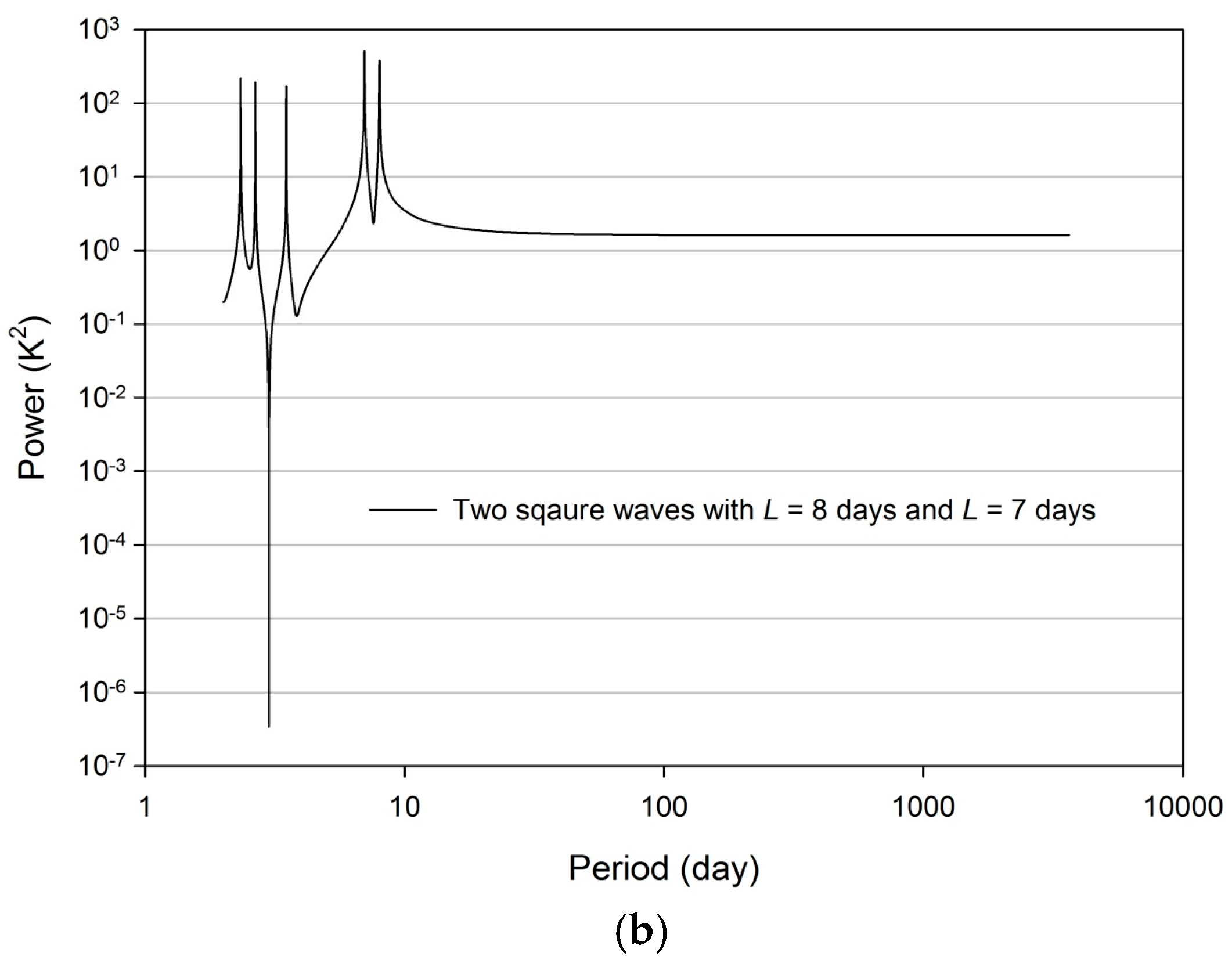
4.2.2. On the Transfer Function of the Modified Boxcar Filter
4.3. Identify the Spectral Features of the Surface Signal
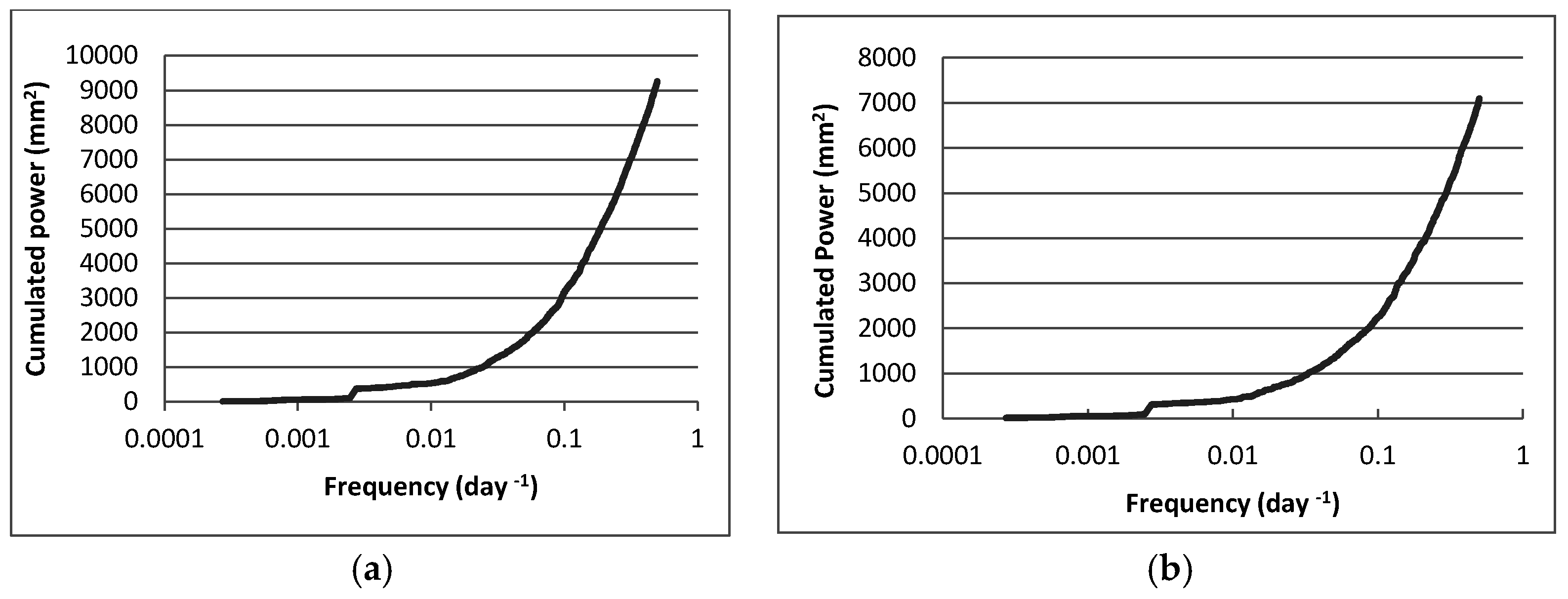
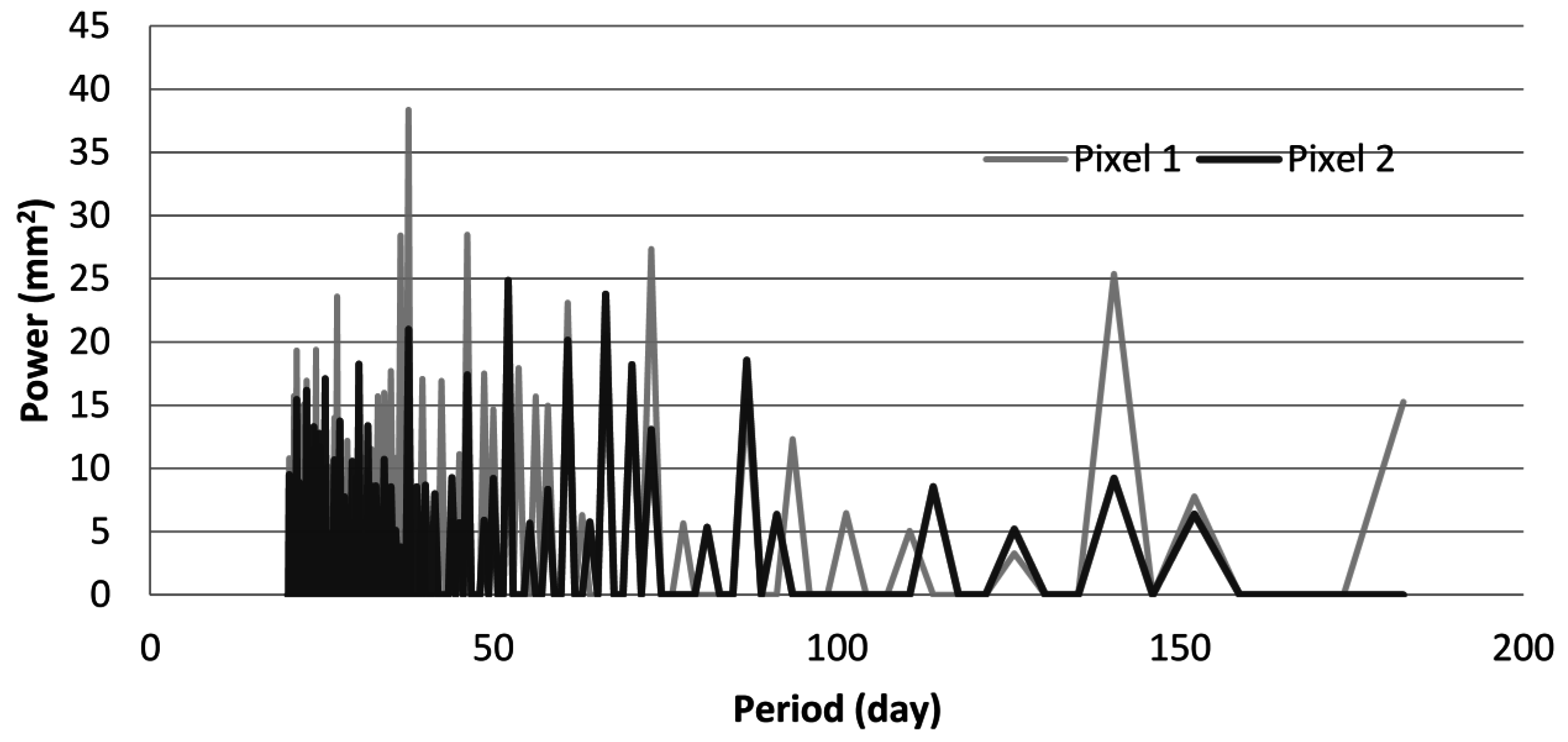
4.3.1. Identify Frequency Range of Atmospheric Signals from Precipitation Time Series
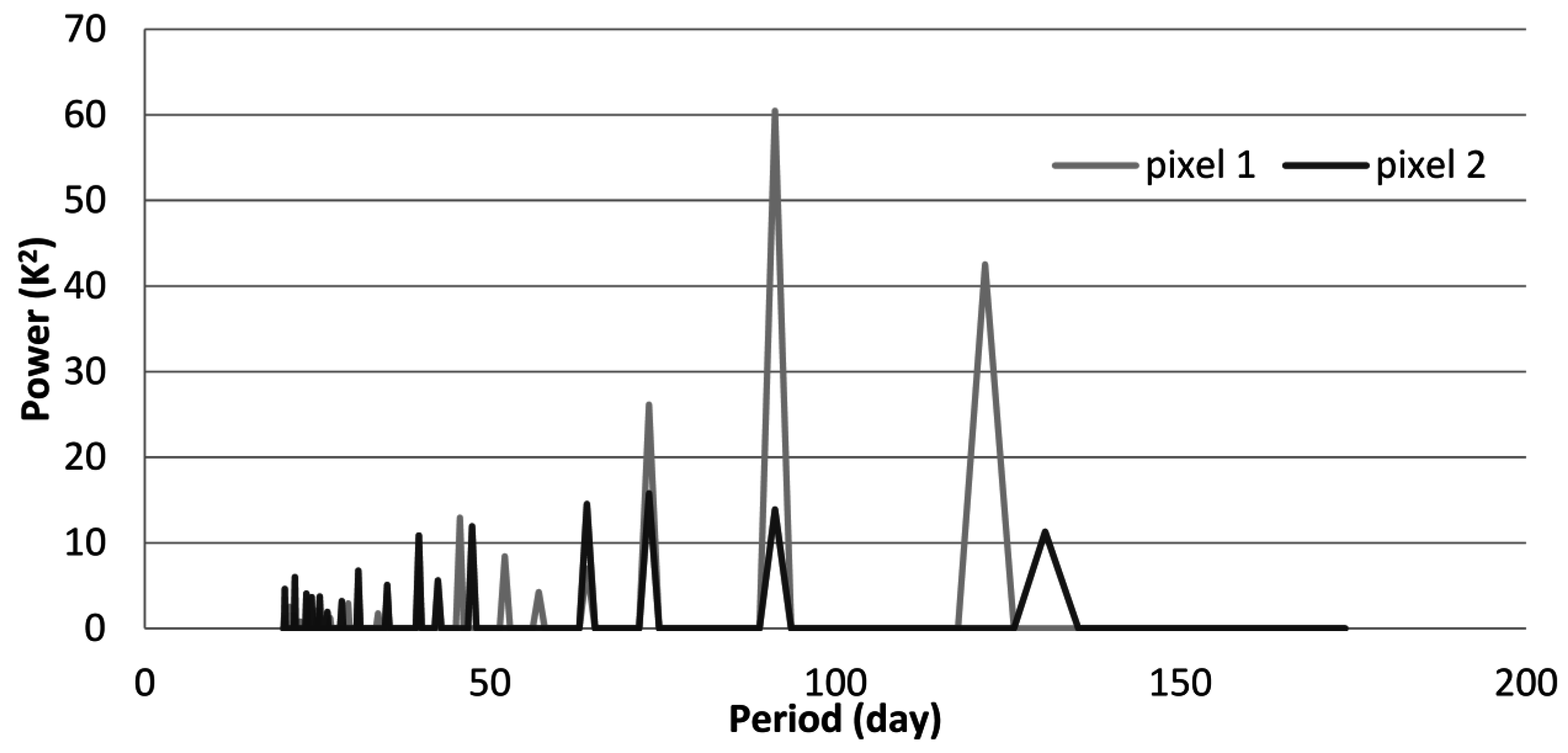
4.3.2. Identify the Spectral Features of the Surface Signal
4.4. Extract the Surface Signal from the Filtered PDBT Time Series by HANTS
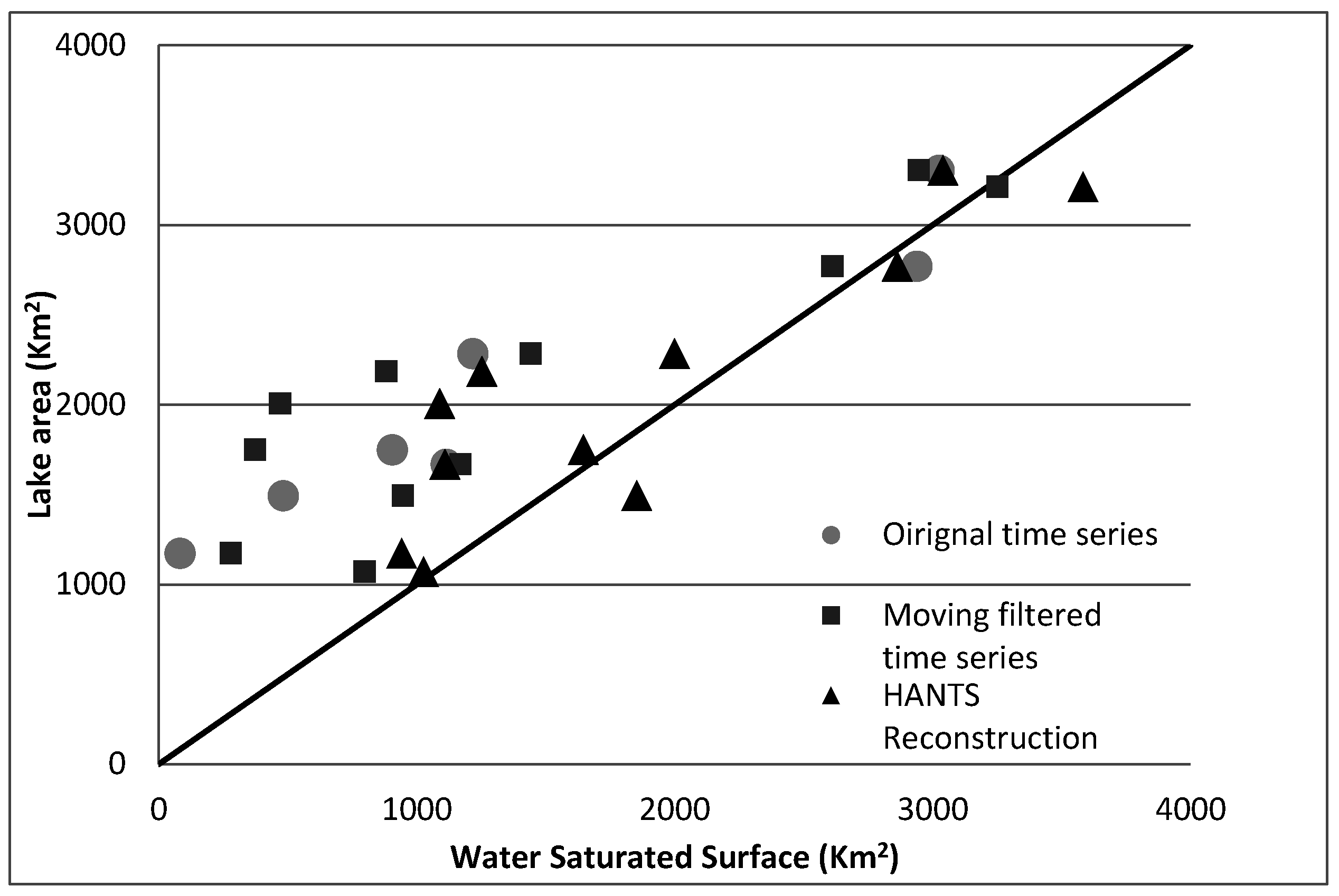
4.5. Statistical Evaluation of TSAP
5. Case Study in the Poyang Lake and Dongting Lake Floodplains
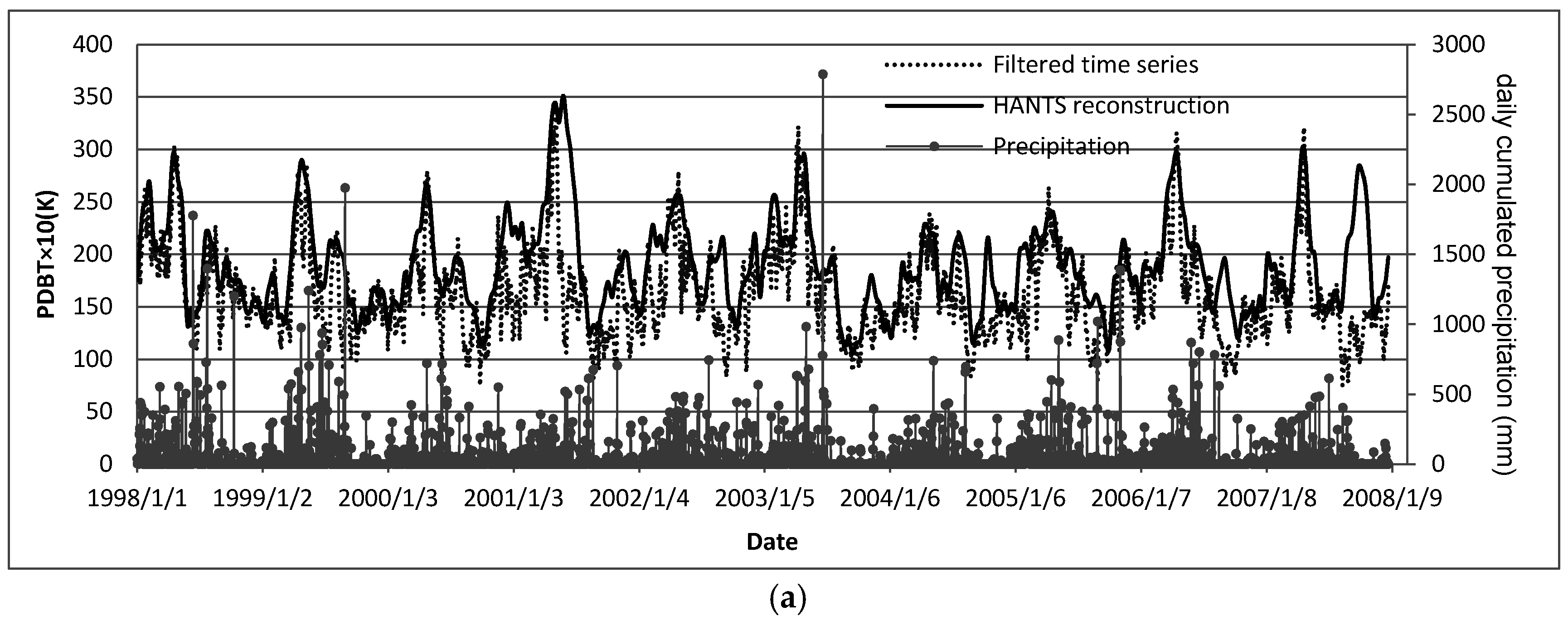
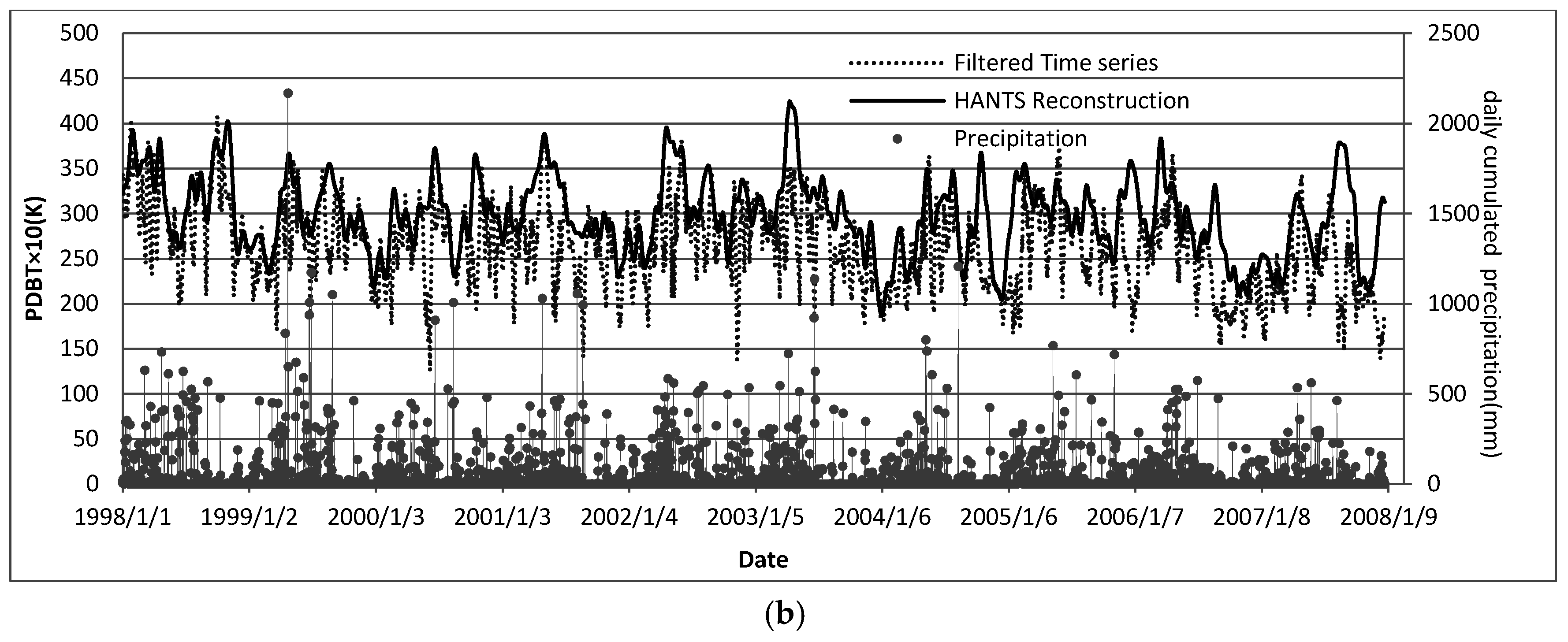
5.1. Time Series Analysis Procedure Applied to the Poyang Lake Area
5.2. Case Study: Poyang Lake
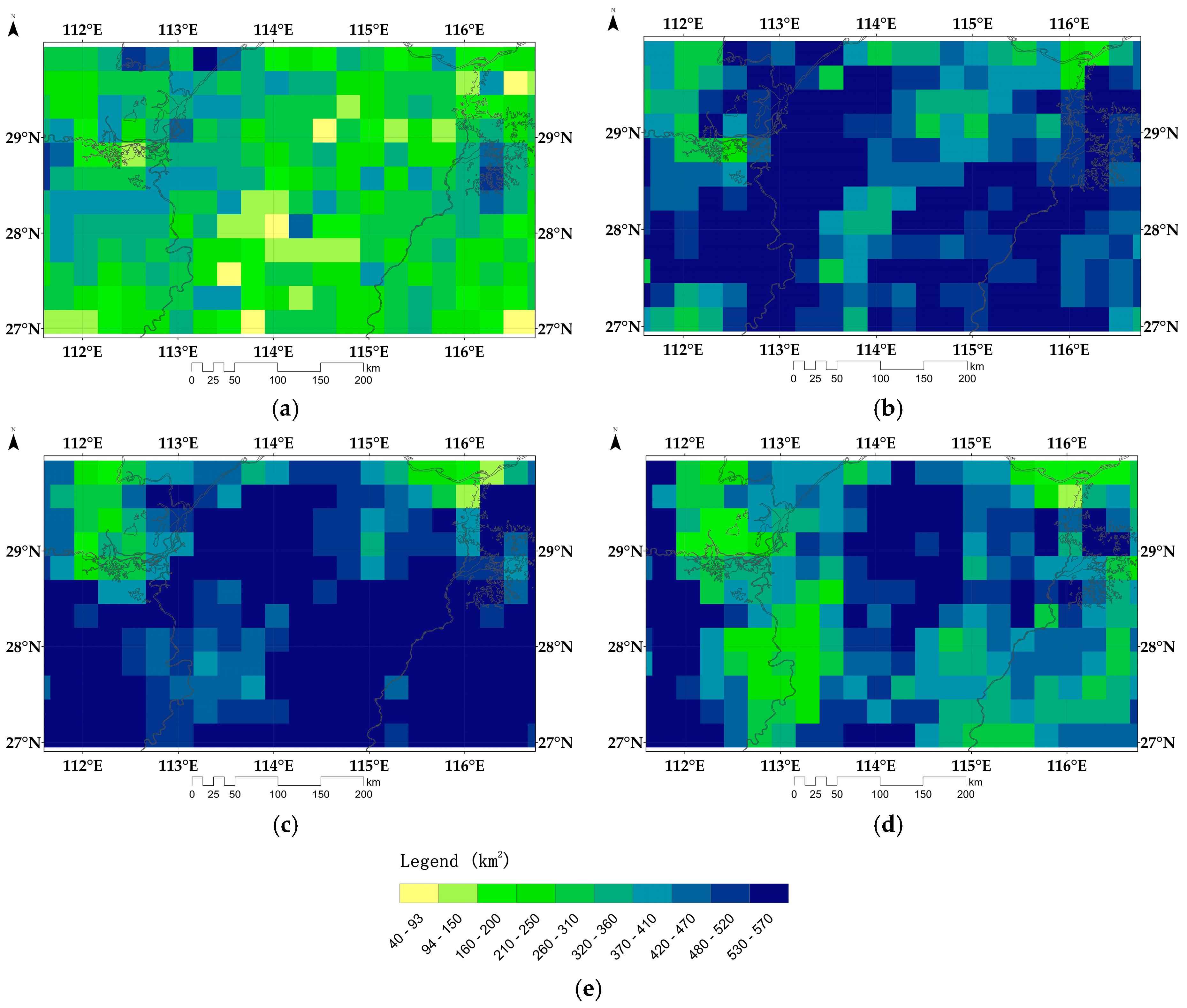
5.3. Observation of WSS over the Poyang Lake and Dongting Lake Floodplains
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AMSR-E | Advanced Microwave Scanning Radiometer for EOS |
| ASAR | Advanced Synthetic Aperture Radar |
| DFT | Discrete Fourier Transform |
| FFT | Fast Fourier Transform |
| FIR | Finite Impulse Response |
| HANTS | Harmonic Analysis of Time Series |
| IFOV | Instantaneous Field of View |
| ISCCP | International Satellite Cloud Climatology Project |
| LST | Land Surface Temperature |
| MODIS | MODerate Resolution Imaging Spectroradiometer |
| NDVI | Normalized Difference Vegetation Index |
| ND | Normalized Difference |
| PDBT | Polarization Difference Brightness Temperature |
| PDEE | Polarization Difference Effective Emissivity |
| SAR | Synthetic Aperture Radar |
| SSM/I | Special Sensor Microwave Imager |
| TOVS | TIROS Operational Vertical Sounder |
| TSAP | Time Series Analysis Procedure |
| WSS | Water Saturated Surface |
References
- Hollinger, J.P.; Peirce, J.L.; Poe, G.A. SSM/I instrument evaluation. IEEE Trans. Geosci. Remote Sens. 1990, 28, 781–790. [Google Scholar] [CrossRef]
- Kawanishi, T.; Sezai, T.; Ito, Y.; Imaoka, K.; Takeshima, T.; Ishido, Y.; Shibata, A.; Miura, M.; Inahata, H.; Spencer, R.W. The advanced microwave scanning radiometer for the earth observing system (AMSR-E), NASDA’s contribution to the EOS for global energy and water cycle studies. IEEE Trans. Geosci. Remote Sens. 2003, 41, 184–194. [Google Scholar] [CrossRef]
- Armstrong, R.; Knowles, K.; Brodzik, M.; Hardman, M.A. DMSP SSM/I-SSMIS Pathfinder Daily EASE-Grid Brightness Temperatures; Version 2; NASA DAAC at the National Snow and ICE Data Center: Boulder, CO, USA, 1998. [Google Scholar]
- Knowles, K.; Savoie, M.; Armstrong, R.; Brodzik, M. AMSR-E/Aqua Daily EASE-Grid Brightness Temperatures; NASA DAAC at the National Snow and ICE Data Center: Boulder, CO, USA, 2006. [Google Scholar]
- Prigent, C.; Rossow, W.B.; Matthews, E. Microwave land surface emissivities estimated from SSM/I observations. J. Geophys. Res. Atmos. 1997, 102, 21867–21890. [Google Scholar] [CrossRef]
- Poe, G.A. Optimum interpolation of imaging microwave radiometer data. IEEE Trans. Geosci. Remote Sens. 1990, 28, 800–810. [Google Scholar] [CrossRef]
- Poe, G.A.; Conway, R.W. A study of the geolocation errors of the special sensor microwave/imager (SSM/I). IEEE Trans. Geosci. Remote Sens. 1990, 28, 791–799. [Google Scholar] [CrossRef]
- Ferraro, R.R.; Marks, G.F. The development of SSM/I rain-rate retrieval algorithms using ground-based radar measurements. J. Atmos. Ocean. Technol. 1995, 12, 755–770. [Google Scholar] [CrossRef]
- Kummerow, C.; Olson, W.S.; Giglio, L. A simplified scheme for obtaining precipitation and vertical hydrometeor profiles from passive microwave sensors. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1213–1232. [Google Scholar] [CrossRef]
- Wentz, F.J. SSM/I Version-7 Calibration Report; Remote Sensing Systems: Santa Rosa, CA, USA, 2013; p. 46. [Google Scholar]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive; Addison-Wesley Pub. Co., Advanced Book Program/World Science Division: Reading, MA, USA, 1981. [Google Scholar]
- Prigent, C.; Aires, F.; Rossow, W.; Matthews, E. Joint characterization of the vegetation by satellite observations from visible to microwave wavelengths: A sensitivity analysis. Characterization of the vegetation by satellite observations. J. Geophys. Res. Atmos. 2001, 106, 20665–20685. [Google Scholar] [CrossRef]
- Prigent, C.; Matthews, E.; Aires, F.; Rossow, W.B. Remote sensing of global wetland dynamics with multiple satellite data sets. Geophys. Res. Lett. 2001, 28, 4631–4634. [Google Scholar] [CrossRef]
- Prigent, C.; Papa, F.; Aires, F.; Rossow, W.; Matthews, E. Global inundation dynamics inferred from multiple satellite observations, 1993–2000. J. Geophys. Res. Atmos. 2007, 112, D12107. [Google Scholar] [CrossRef]
- Shang, H.; Jia, J.; Menenti, M. Analyzing the inundation pattern of the Poyang Lake floodplain by passive microwave data. J. Hydrometeorol. 2015, 16, 652–667. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Martinuzzi, J.; Font, J.; Berger, M. Soil moisture retrieval from space: The soil moisture and ocean salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1729–1735. [Google Scholar] [CrossRef]
- Njoku, E.G.; Jackson, T.J.; Lakshmi, V.; Chan, T.K.; Nghiem, S.V. Soil moisture retrieval from AMSR-E. IEEE Trans. Geosci. Remote Sens. 2003, 41, 215–229. [Google Scholar] [CrossRef]
- O’Neill, P.E.; Jackson, T.J.; Chauhan, N.S.; Seyfried, M.S. Microwave soil moisture estimation in humid and semiarid watersheds. Adv. Space Res. 1993, 13, 115–118. [Google Scholar] [CrossRef]
- Paloscia, S.; Macelloni, G.; Santi, E.; Koike, T. A multi-frequency algorithm for the retrieval of soil moisture on a large scale using microwave data from SMMR and SSM/I satellites. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1655–1661. [Google Scholar] [CrossRef]
- Wang, J.R.; Choudhury, B.J. Remote sensing of soil moisture content over bare field at 1.4 GHz frequency. J. Geophys. Res. 1981, 86, 5277–5282. [Google Scholar] [CrossRef]
- Choudhury, B.J. Monitoring global land surface using nimbus-7 37 GHz data. Theory and examples. Int. J. Remote Sens. 1989, 10, 1579–1605. [Google Scholar] [CrossRef]
- Giddings, L.; Choudhury, B.J. Observation of hydrological features with nimbus-7 37 GHz data, applied to South America. Int. J. Remote Sens. 1989, 10, 1673–1686. [Google Scholar] [CrossRef]
- Hamilton, S.K.; Sippel, S.J.; Melack, J.M. Inundation patterns in the Pantanal wetland of South America determined from passive microwave remote sensing. Arch. Hydrobiol. 1996, 137, 1–23. [Google Scholar]
- Hamilton, S.K.; Sippel, S.J.; Melack, J.M. Comparison of inundation patterns among major South American floodplains. J. Geophys. Res. D Atmos. 2002, 107, 8038. [Google Scholar] [CrossRef]
- Hamilton, S.K.; Sippel, S.J.; Melack, J.M. Seasonal inundation patterns in two large savanna floodplains of South America: The llanos De Moxos (Bolivia) and the llanos Del Orinoco (Venezuela and Colombia). Hydrolog. Process. 2004, 18, 2103–2116. [Google Scholar] [CrossRef]
- Sippel, S.J.; Hamilton, S.K.; Melack, J.M.; Choudhury, B.J. Determination of inundation area in the amazon river floodplain using the SMMR 37 Ghz polarization difference. Remote Sens. Environ. 1994, 48, 70–76. [Google Scholar] [CrossRef]
- Sippel, S.J.; Hamilton, S.K.; Melack, J.M.; Novo, E.M.M. Passive microwave observations of inundation area and the area/stage relation in the amazon river floodplain. Int. J. Remote Sens. 1998, 19, 3055–3074. [Google Scholar] [CrossRef]
- Tanaka, M.; Sugimura, T.; Tanaka, S.; Tamai, N. Flood–drought cycle of Tonle Sap and Mekong delta area observed by DMSP-SSM/I. Int. J. Remote Sens. 2003, 24, 1487–1504. [Google Scholar] [CrossRef]
- Choudhury, B.J.; Major, E.R.; Smith, E.A.; Becker, F. Atmospheric effects on SMMR and SSM/I 37 GHz polarization difference over the sahel. Int. J. Remote Sens. 1992, 13, 3443–3463. [Google Scholar] [CrossRef]
- Choudhury, B.J. Passive microwave remote sensing contribution to hydrological variables. In Land Surface-Atmosphere Interactions for Climate Modeling; Springer: Dordrecht, The Netherlands, 1991; pp. 63–84. [Google Scholar]
- Rossow, W.B.; Schiffer, R.A. Advances in understanding clouds from ISCCP. Bull. Am. Meteorol. Soc. 1999, 80, 2261. [Google Scholar] [CrossRef]
- Aires, F.; Prigent, C.; Rossow, W.; Rothstein, M.; Hansen, J.E. A new neural network approach including first-guess for retrieval of atmospheric water vapor, cloud liquid water path, surface temperature and emissivities over land from satellite microwave observations. J. Geophys. Res. 2001, 106, 14887–14907. [Google Scholar] [CrossRef]
- Behrangi, A.; Guan, B.; Neiman, P.J.; Schreier, M.; Lambrigtsen, B. On the quantification of atmospheric rivers precipitation from space: Composite assessments and case studies over the eastern North Pacific Ocean and the western united states. J. Hydrometeorol. 2016, 17, 369–382. [Google Scholar] [CrossRef]
- Boukabara, S.-A.; Garrett, K.; Chen, W. Global coverage of total precipitable water using a microwave variational algorithm. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3608–3621. [Google Scholar] [CrossRef]
- Reale, A.; Chalfant, M.; Allegrino, A.; Tiley, F.; Gerguson, M.; Pettey, M. Advanced-TOVS (ATOVS) sounding products from NOAA polar orbiting environmental satellites. In Proceedings of the 12th Conference on Satellite Meteorology and Oceanography, Long Beach, CA, USA, 9–13 February 2003.
- Agrawal, R.; Faloutsos, C.; Swami, A. Efficient Similarity Search in Sequence Databases; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Keogh, E.; Chakrabarti, K.; Pazzani, M.; Mehrotra, S. Dimensionality reduction for fast similarity search in large time series databases. Knowl. Inf. Syst. 2001, 3, 263–286. [Google Scholar] [CrossRef]
- Lin, R.; King-lp, A.; Shim, H.S.S.K. Fast similarity search in the presence of noise, scaling, and translation in time-series databases. In Proceedings of the 21th International Conference on Very Large Data Bases, Zurich, Switzerland, 9–13 September 1995; pp. 490–501.
- Mörchen, F. Time Series Feature Extraction for Data Mining Using DWT and DFT; University of Marburg: Marburg, Germany, 2003. [Google Scholar]
- Wu, Y.-L.; Agrawal, D.; El Abbadi, A. A comparison of DFT and DWT based similarity search in time-series databases. In Proceedings of the Ninth International Conference on Information and Knowledge Management, McLean, VA, USA, 6–11 November 2000; pp. 488–495.
- Harris, F.J. On the use of windows for harmonic analysis with the Discrete Fourier Transform. Proc. IEEE 1978, 66, 51–83. [Google Scholar] [CrossRef]
- Nerem, R.; Chambers, D.; Leuliette, E.; Mitchum, G.; Giese, B. Variations in global mean sea level associated with the 1997–1998 Enso event: Implications for measuring long term sea level change. Geophys. Res. Lett. 1999, 26, 3005–3008. [Google Scholar] [CrossRef]
- Entin, J.K.; Robock, A.; Vinnikov, K.Y.; Hollinger, S.E.; Liu, S.; Namkhai, A. Temporal and spatial scales of observed soil moisture variations in the extratropics. J. Geophys. Res. 2000, 105, 11865–11877. [Google Scholar] [CrossRef]
- Skøien, J.O.; Blöschl, G.; Western, A. Characteristic space scales and timescales in hydrology. Water Resour. Res. 2003, 39, 1304. [Google Scholar] [CrossRef]
- Vachaud, G.; Passerat de Silans, A.; Balabanis, P.; Vauclin, M. Temporal stability of spatially measured soil water probability density function. Soil Sci. Soc. Am. J. 1985, 49, 822–828. [Google Scholar] [CrossRef]
- Vinnikov, K.Y.; Robock, A.; Speranskaya, N.A.; Schlosser, C.A. Scales of temporal and spatial variability of midlatitude soil moisture. J. Geophys. Res. Atmos. 1996, 101, 7163–7174. [Google Scholar] [CrossRef]
- Wilson, D.J.; Western, A.W.; Grayson, R.B. Identifying and quantifying sources of variability in temporal and spatial soil moisture observations. Water Resour. Res. 2004, 40, W02507. [Google Scholar] [CrossRef]
- D’Odorico, P.; Rodrı́guez-Iturbe, I. Space-time self-organization of mesoscale rainfall and soil moisture. Adv. Water Resour. 2000, 23, 349–357. [Google Scholar] [CrossRef]
- Menenti, M.; Azzali, S.; Verhoef, W.; van Swol, R. Mapping agro-ecological zones and time lag in vegetation growth by means of fourier analysis of time series of NDVI images. Adv. Space Res. 1993, 13, 233–237. [Google Scholar] [CrossRef]
- Jia, L.; Shang, H.; Hu, G.; Menenti, M. Phenological response of vegetation to upstream river flow in the Heihe river basin by time series analysis of MODIS data. Hydrol. Earth Syst. Sci. 2011, 15, 1047–1064. [Google Scholar] [CrossRef] [Green Version]
- Roerink, G.J.; Menenti, M.; Soepboer, W.; Su, Z. Assessment of climate impact on vegetation dynamics by using remote sensing. Phys. Chem. Earth 2003, 28, 103–109. [Google Scholar] [CrossRef]
- Roerink, G.J.; Menenti, M.; Verhoef, W. Reconstructing cloudfree NDVI composites using Fourier analysis of time series. Int. J. Remote Sens. 2000, 21, 1911–1917. [Google Scholar] [CrossRef]
- Verhoef, W. Application of harmonic analysis of NDVI time series (HANTS). In Fourier Analysis of Temporal NDVI in the Souther African and American Continents; Azzali, S., Menenti, M., Eds.; DLO Winand Staring Centre: Wageningen, The Netherlands, 1996; pp. 19–24. [Google Scholar]
- Cooley, J.W.; Lewis, P.A.; Welch, P.D. Application of the fast Fourier transform to computation of Fourier integrals, Fourier series, and convolution integrals. IEEE Trans. Audio Electroacoust. 1967, 15, 79–84. [Google Scholar] [CrossRef]
- Cooley, J.W.; Tukey, J.W. An algorithm for the machine calculation of complex Fourier series. Math. Comput. 1965, 19, 297–301. [Google Scholar] [CrossRef]
- Singleton, R.C. An algorithm for computing the mixed radix fast Fourier transform. IEEE Trans. Audio Electroacoust. 1969, 17, 93–103. [Google Scholar] [CrossRef]
- Project, B.M.; Erdélyi, A.; Bateman, H. Tables of Integral Transforms: Based in Part on Notes Left by Harry Bateman and Compiled by the Staff of the Bateman Manuscript Project; McGraw-Hill: New York, NY, USA, 1954. [Google Scholar]
- Yésou, H.; Claire, H.; Xijun, L.; Stéphane, A.; Jiren, L.; Sylviane, D.; Muriel, B.-N.; Xiaoling, C.; Shifeng, H.; Burnham, J.; et al. Nine years of water resources monitoring over the middle reaches of the Yangtze river, with ENVISAT, MODIS, Beijing-1 time series, altimetric data and field measurements. Lakes Reserv. Res. Manag. 2011, 16, 231–247. [Google Scholar]
- Thompson, A.R.; Moran, J.M.; Swenson, G.W., Jr. Interferometry and Synthesis in Radio Astronomy; John Wiley & Sons: Weinheim, Germany, 2008. [Google Scholar]
- Czekala, H.; Havemann, S.; Schmidt, K.; Rother, T.; Simmer, C. Comparison of microwave radiative transfer calculations obtained with three different approximations of hydrometeor shape. J. Quant. Spectrosc. Radiat. Transf. 1999, 63, 545–558. [Google Scholar] [CrossRef]
- Gerek, Ö.N.; Yardimci, Y. Equiripple fir filter design by the FFT algorithm. IEEE Signal Process. Mag. 1997, 14, 60–64. [Google Scholar]
- Richards, F.; Arkin, P. On the relationship between satellite-observed cloud cover and precipitation. Mon. Weather Rev. 1981, 109, 1081–1093. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pixel Location | Period of Surface Components (Days) |
|---|---|
| The 1st sample | 64, 57, 46, 34, 31, 25, 23, 20 |
| The 2nd sample | 47, 42, 40, 31, 29, 26, 25, 23 |
| 1st Example at Crop Land | 2nd Example at Lake Area | |||||
|---|---|---|---|---|---|---|
| Raw Data | Boxcar Filter | HANTS | Raw Data | Boxcar Filter | HANTS | |
| non-zero Minimum (K) | 2.2 | 7.4 | 10.6 | 2.2 | 12.6 | 18.7 |
| Maximum (K) | 41 | 34.3 | 35.1 | 45.8 | 40.8 | 42.5 |
| Mean (K) | 16.1 | 16.2 | 18.9 | 25.9 | 26.4 | 29.8 |
| Std (K) | 9.2 | 4.3 | 4.5 | 14 | 4.6 | 4.3 |
| 1st Example at Crop Land | 2nd Example at Lake Area | |||
|---|---|---|---|---|
| Raw—Boxcar Filter | Boxcar Filter—HANTS | Raw—Boxcar Filter | Boxcar Filter—HANTS | |
| RMSD (K) | 11.7 | 4.4 | 18.1 | 5.5 |
| R2 | RMSE (km2) | Relative RMSE | |
|---|---|---|---|
| Original Time series | 0.9195 | 802.14 | 38.48% |
| boxcar filtered | 0.7845 | 866.93 | 41.59% |
| HANTS Reconstruction | 0.7747 | 479.33 | 22.99% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, H.; Jia, L.; Menenti, M. Modeling and Reconstruction of Time Series of Passive Microwave Data by Discrete Fourier Transform Guided Filtering and Harmonic Analysis. Remote Sens. 2016, 8, 970. https://doi.org/10.3390/rs8110970
Shang H, Jia L, Menenti M. Modeling and Reconstruction of Time Series of Passive Microwave Data by Discrete Fourier Transform Guided Filtering and Harmonic Analysis. Remote Sensing. 2016; 8(11):970. https://doi.org/10.3390/rs8110970
Chicago/Turabian StyleShang, Haolu, Li Jia, and Massimo Menenti. 2016. "Modeling and Reconstruction of Time Series of Passive Microwave Data by Discrete Fourier Transform Guided Filtering and Harmonic Analysis" Remote Sensing 8, no. 11: 970. https://doi.org/10.3390/rs8110970