3.2. Surface Return Area Retrieval Results
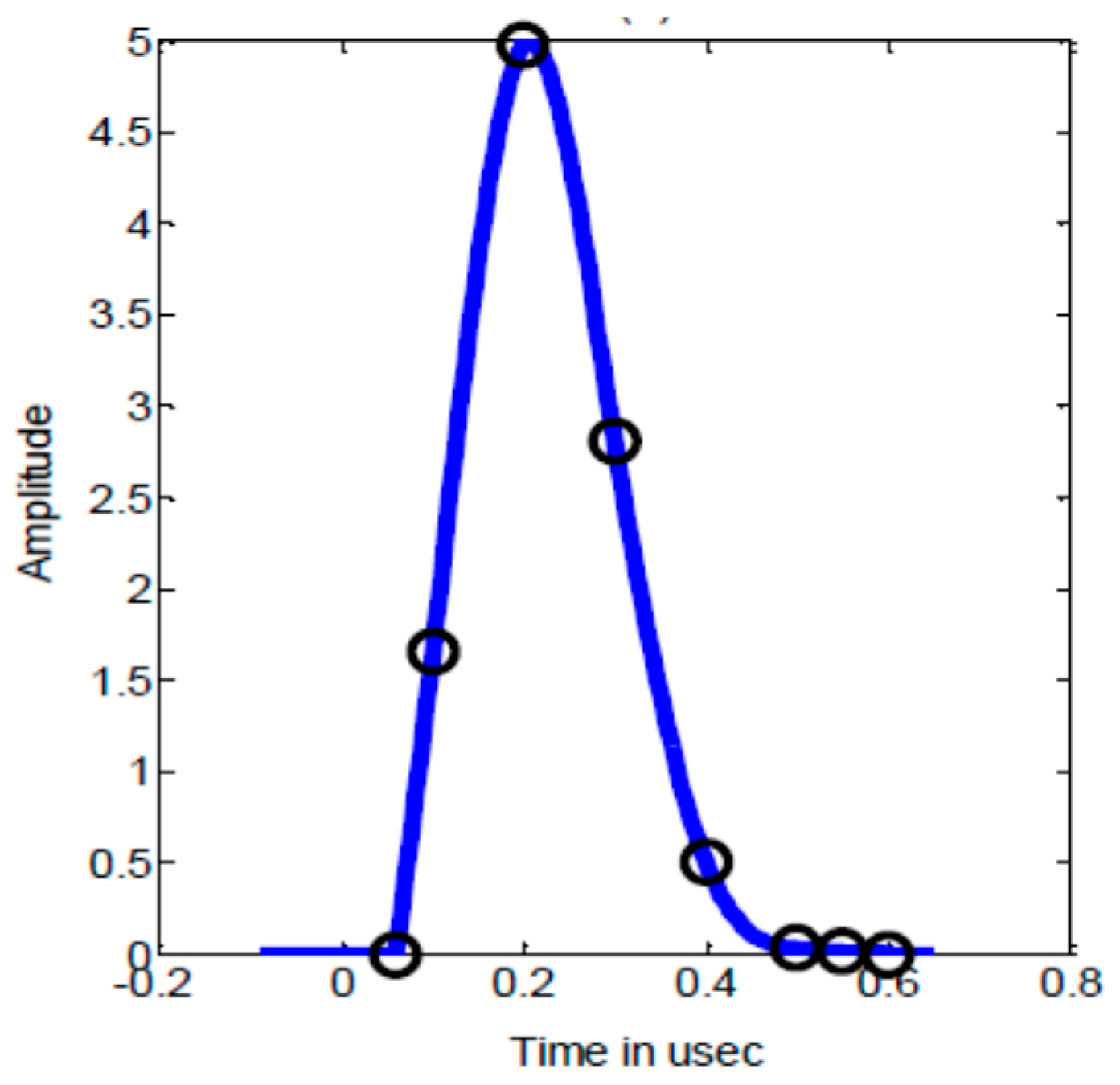
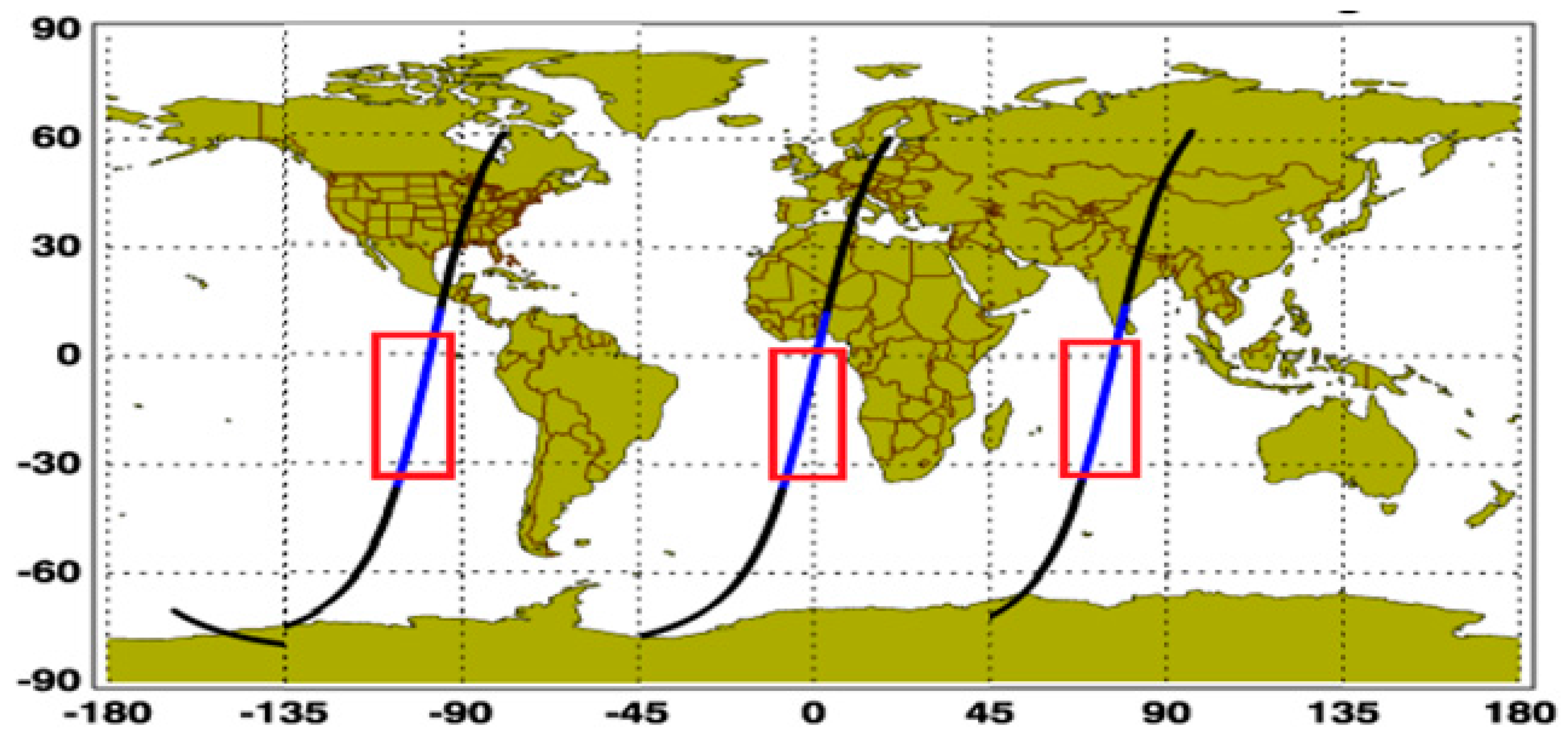
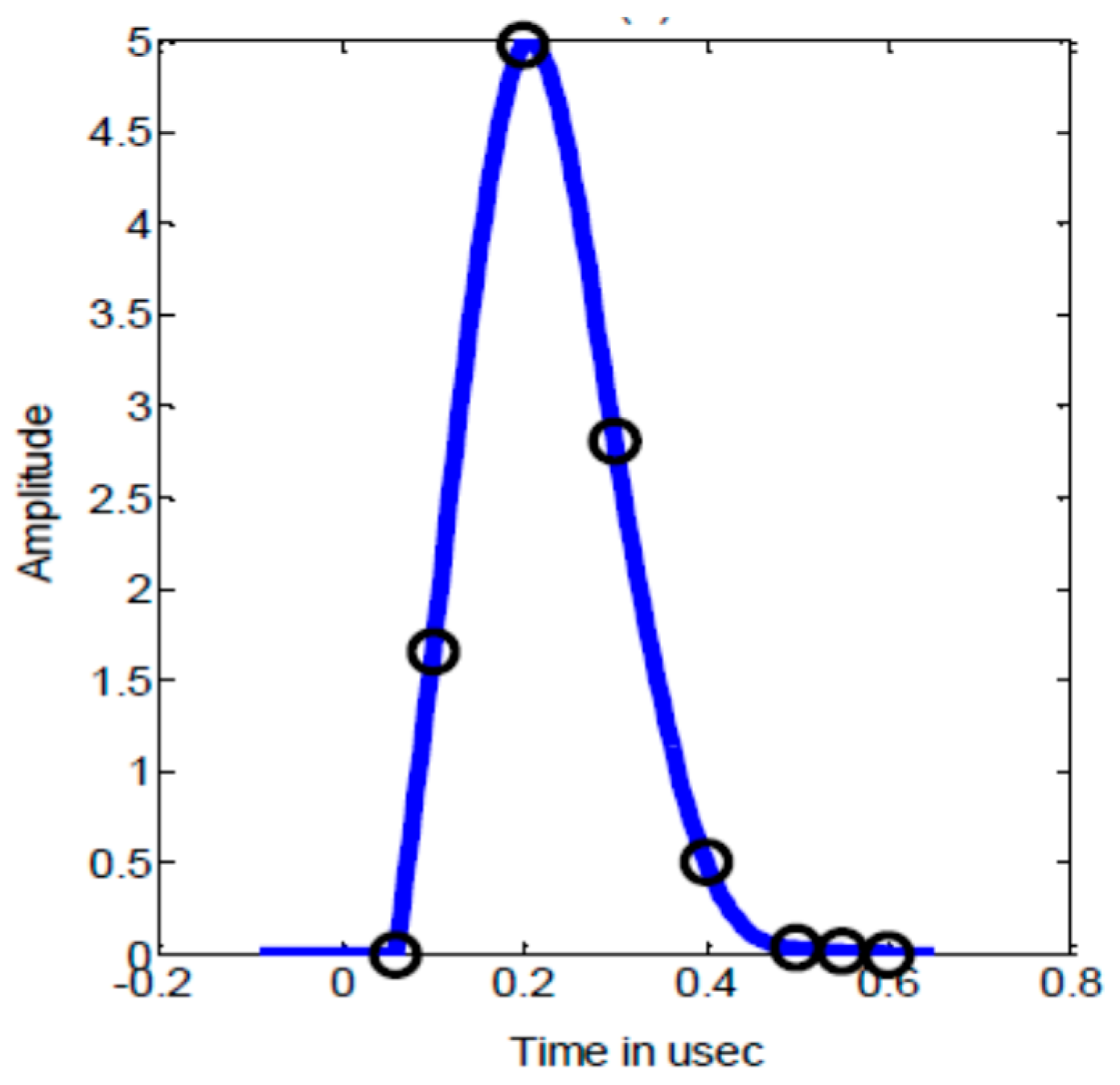
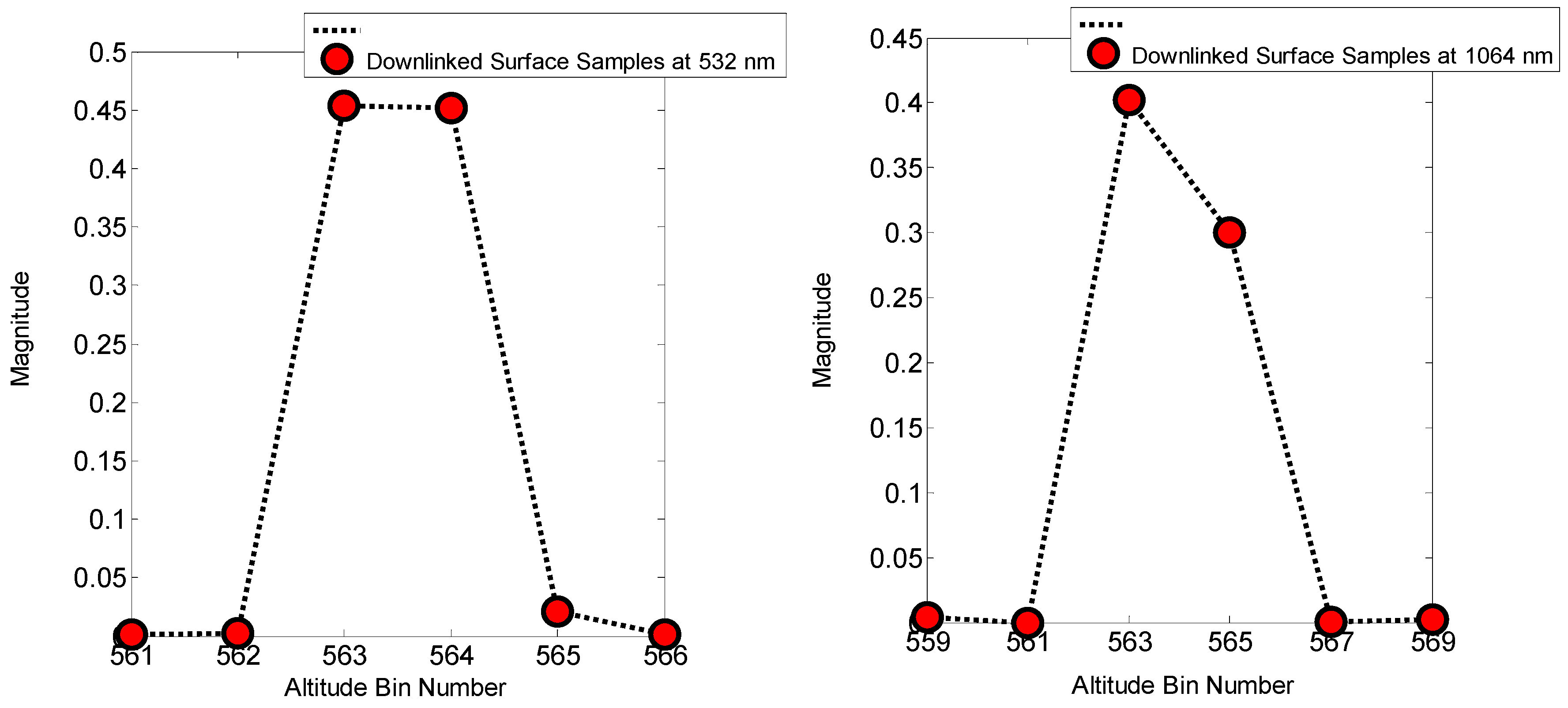
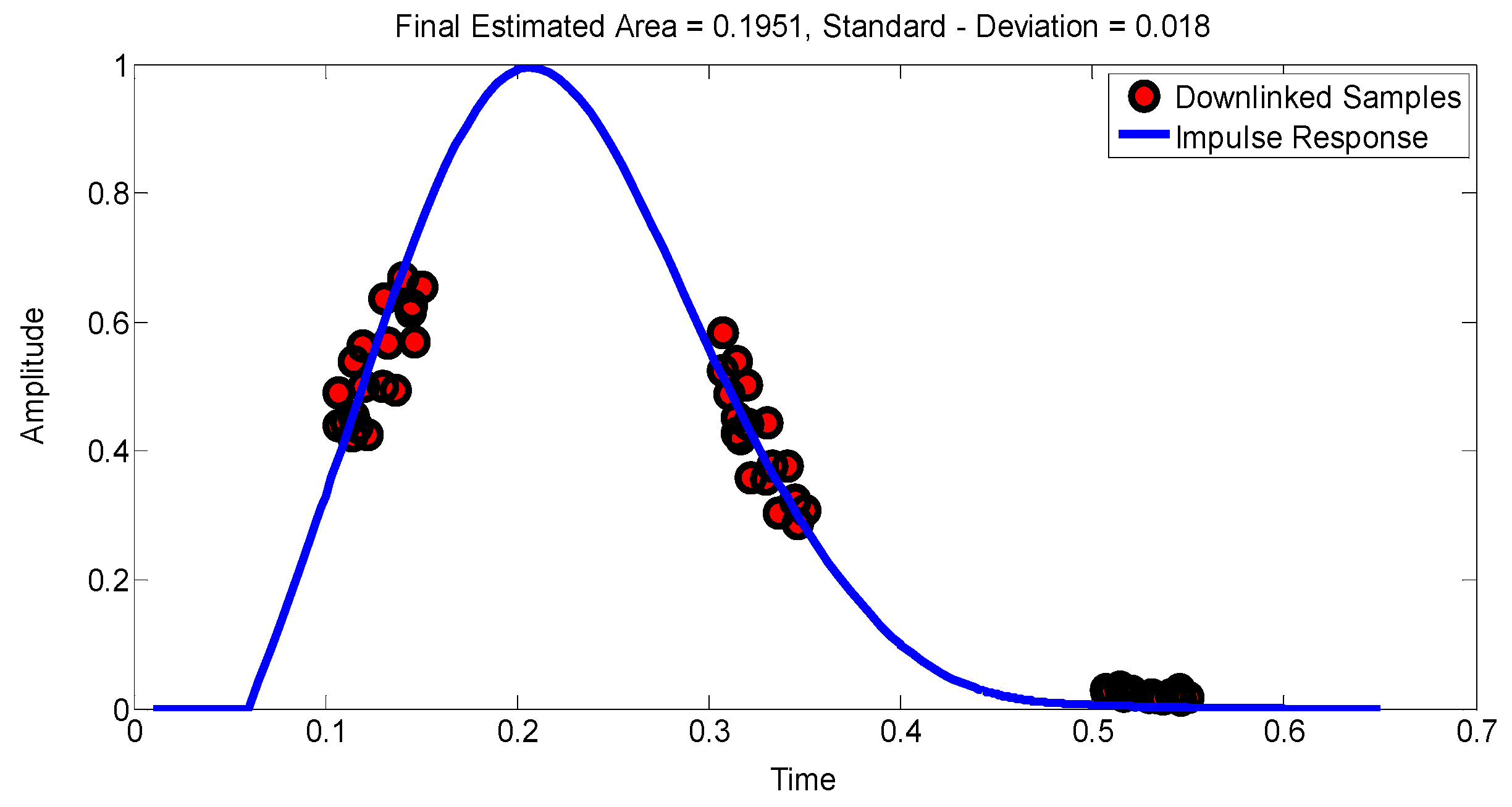
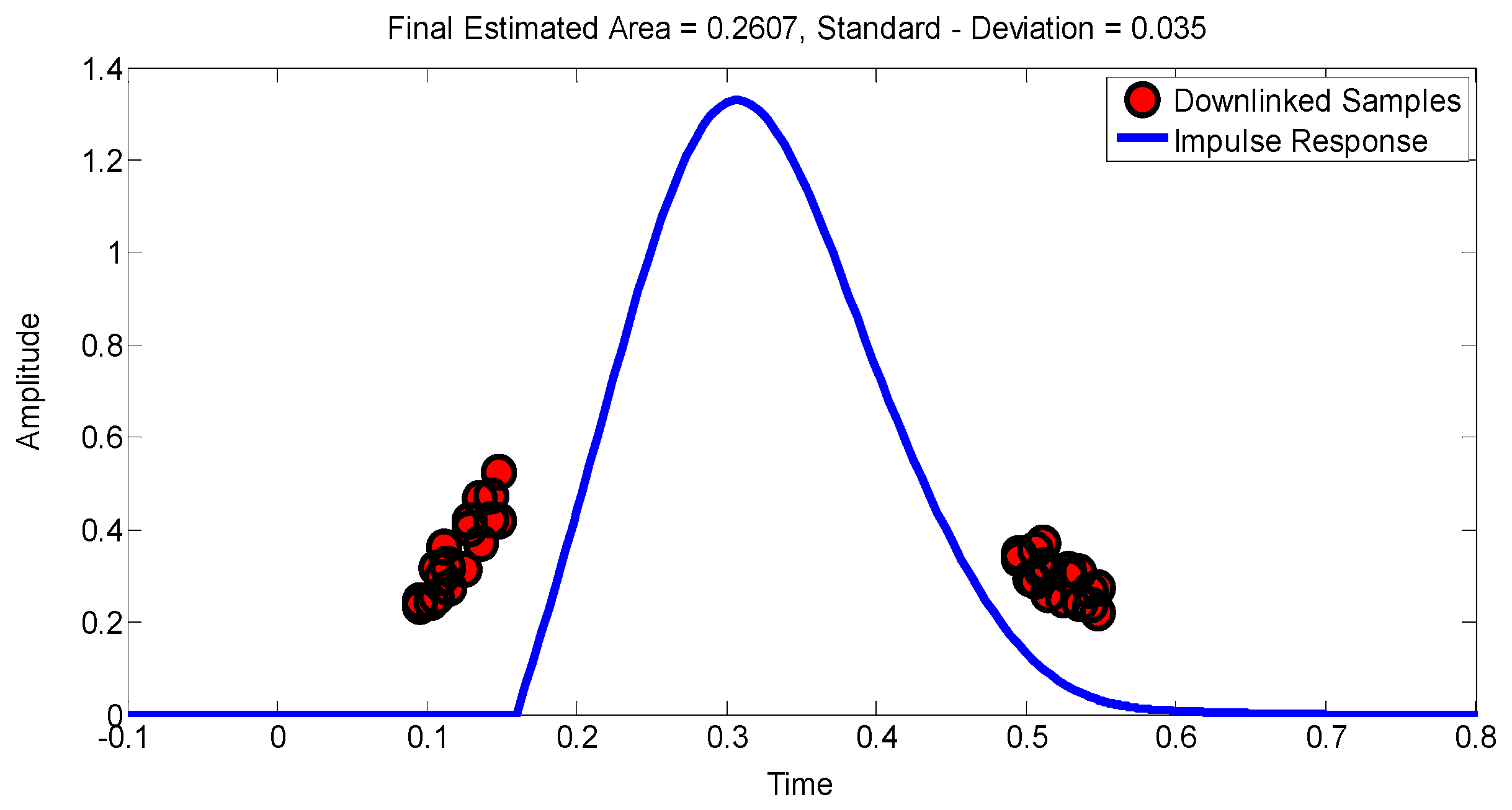
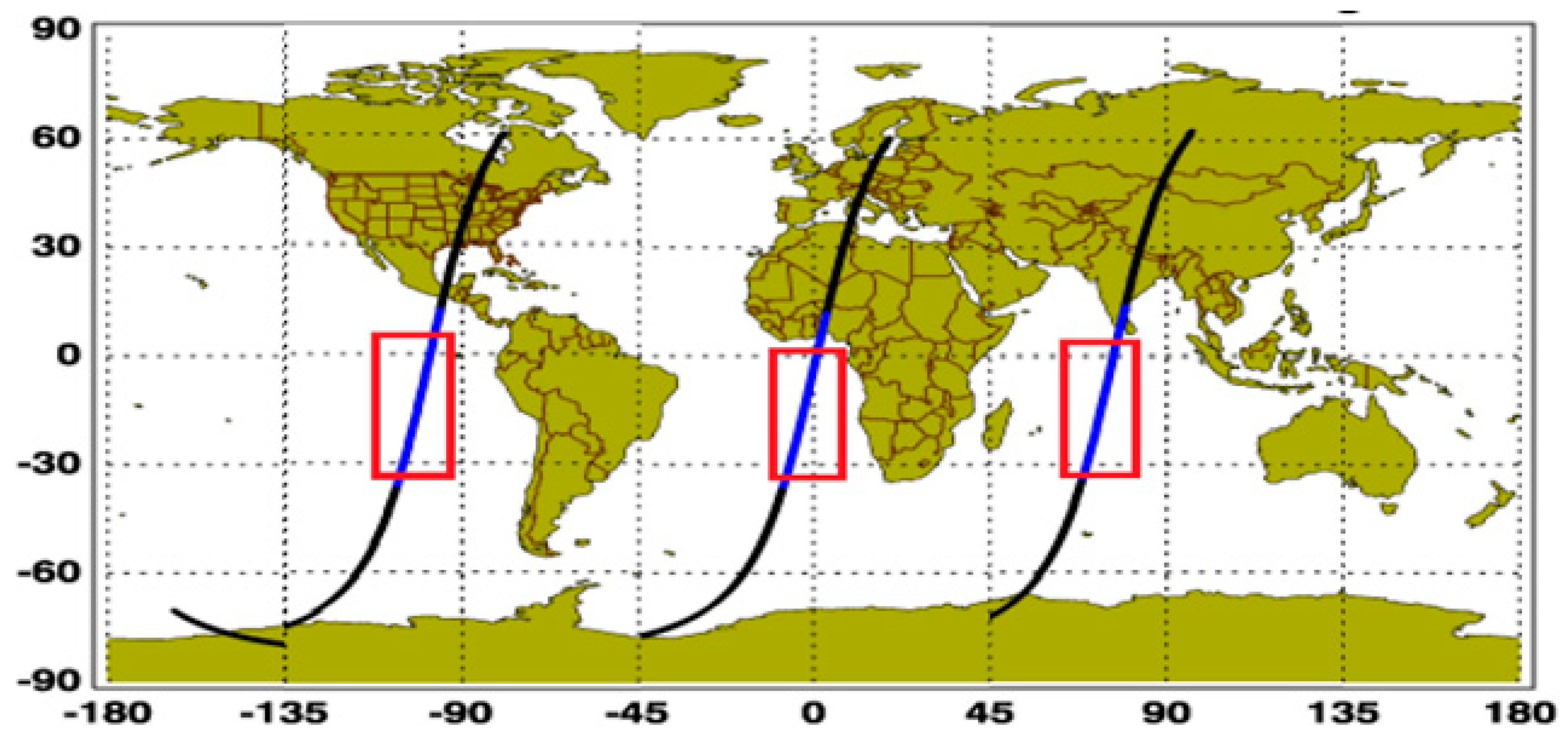
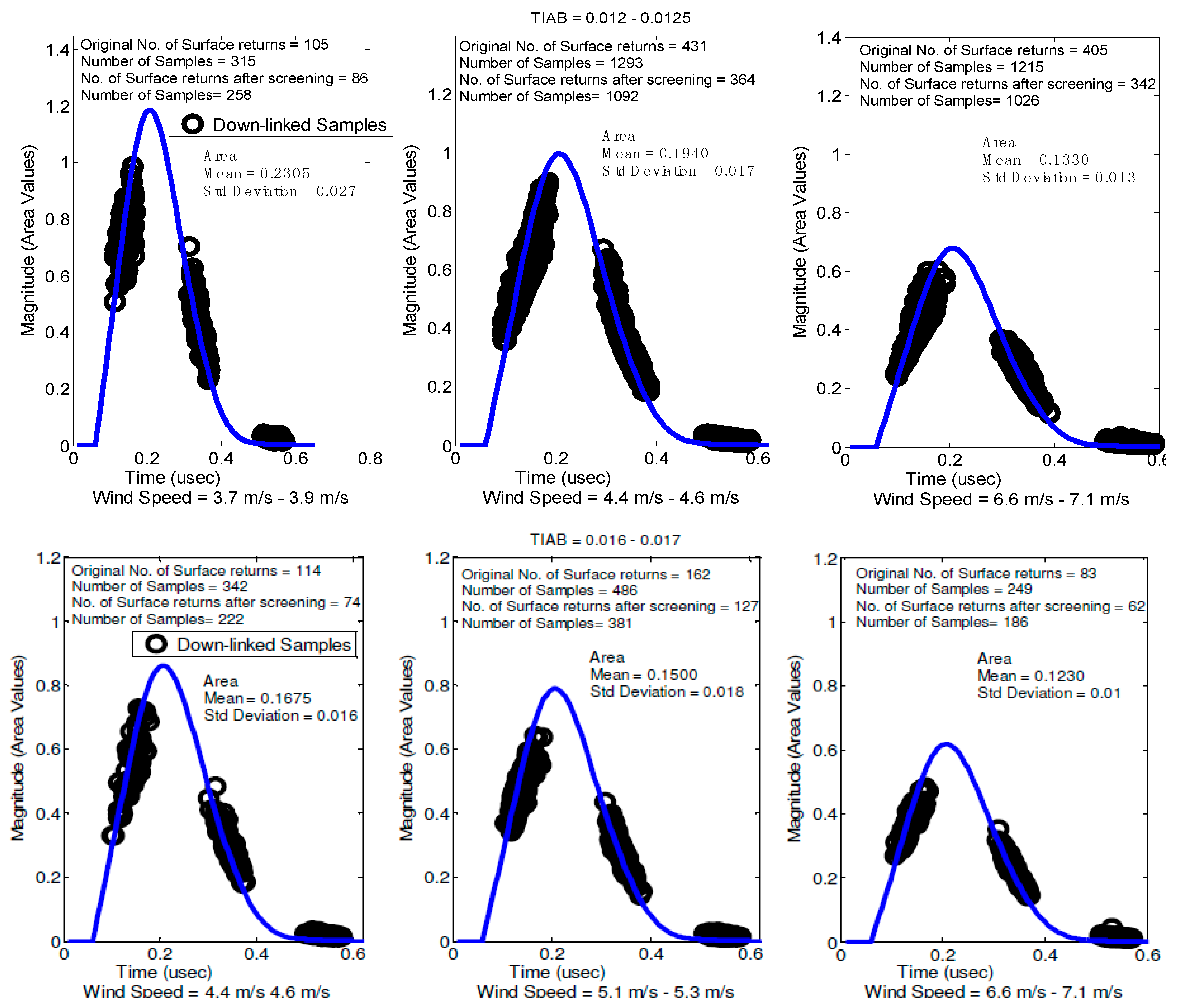
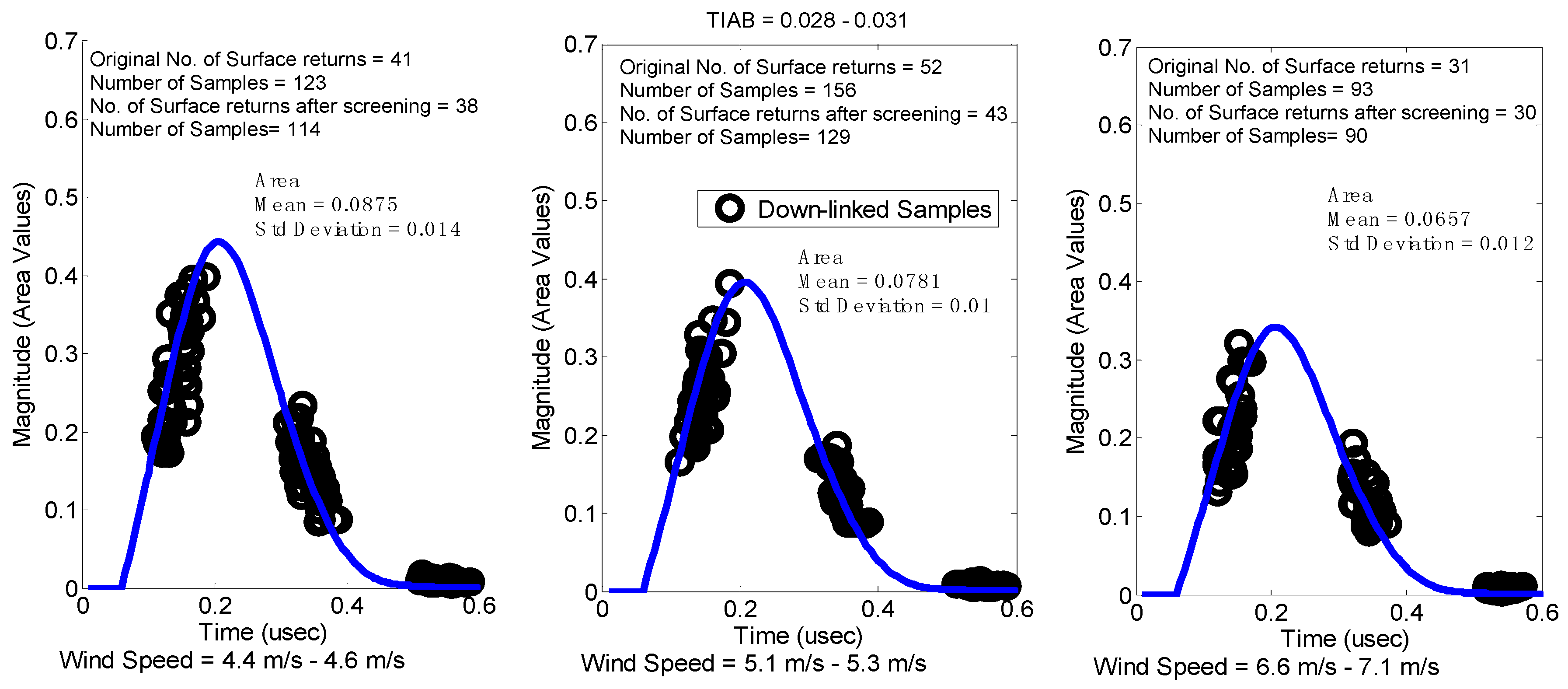
Example SR impulse response curve fits for data collected from the Southern Pacific Ocean region (see area defined in
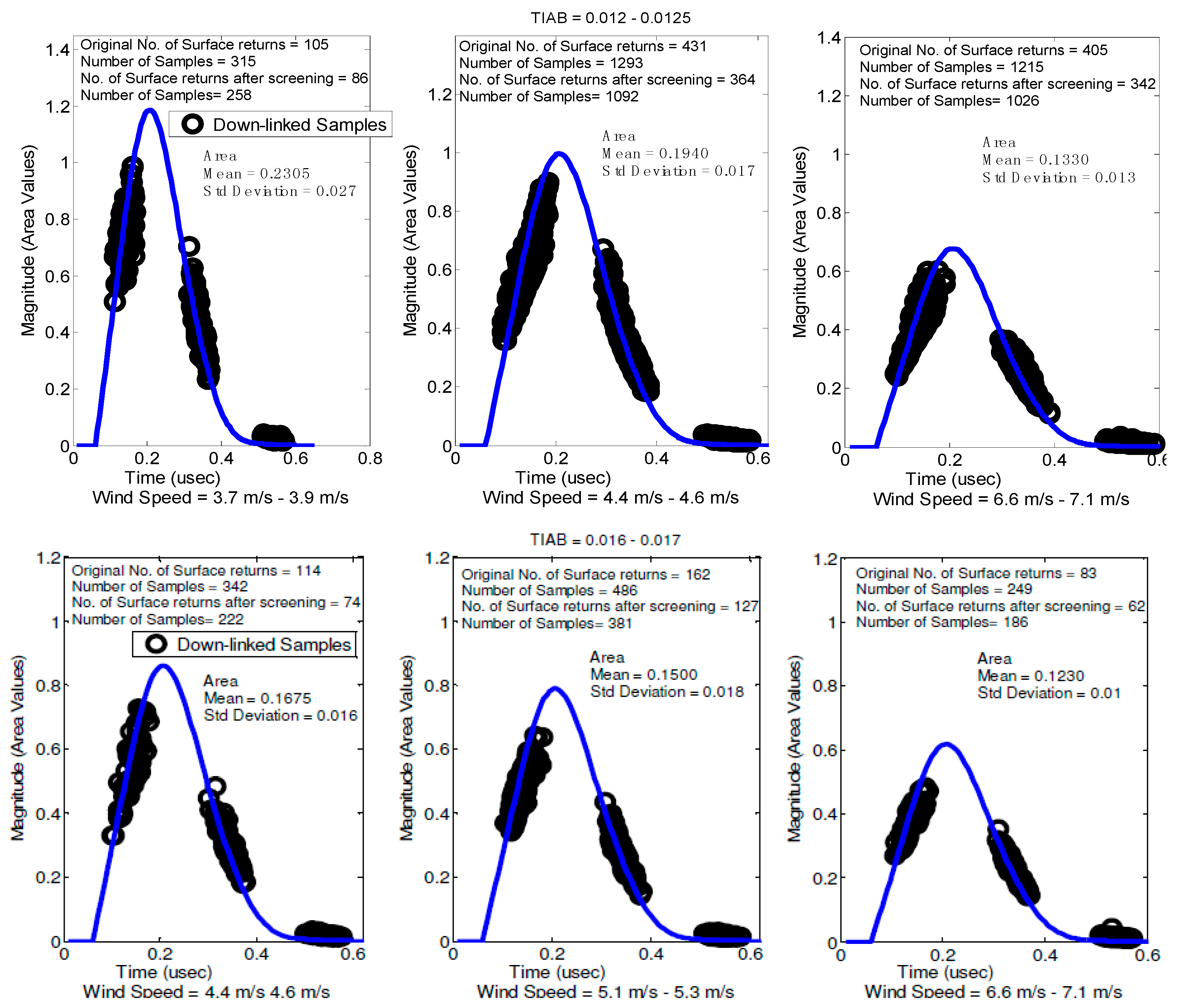
Figure 14) for the 532 nm channel are shown for several groupings in
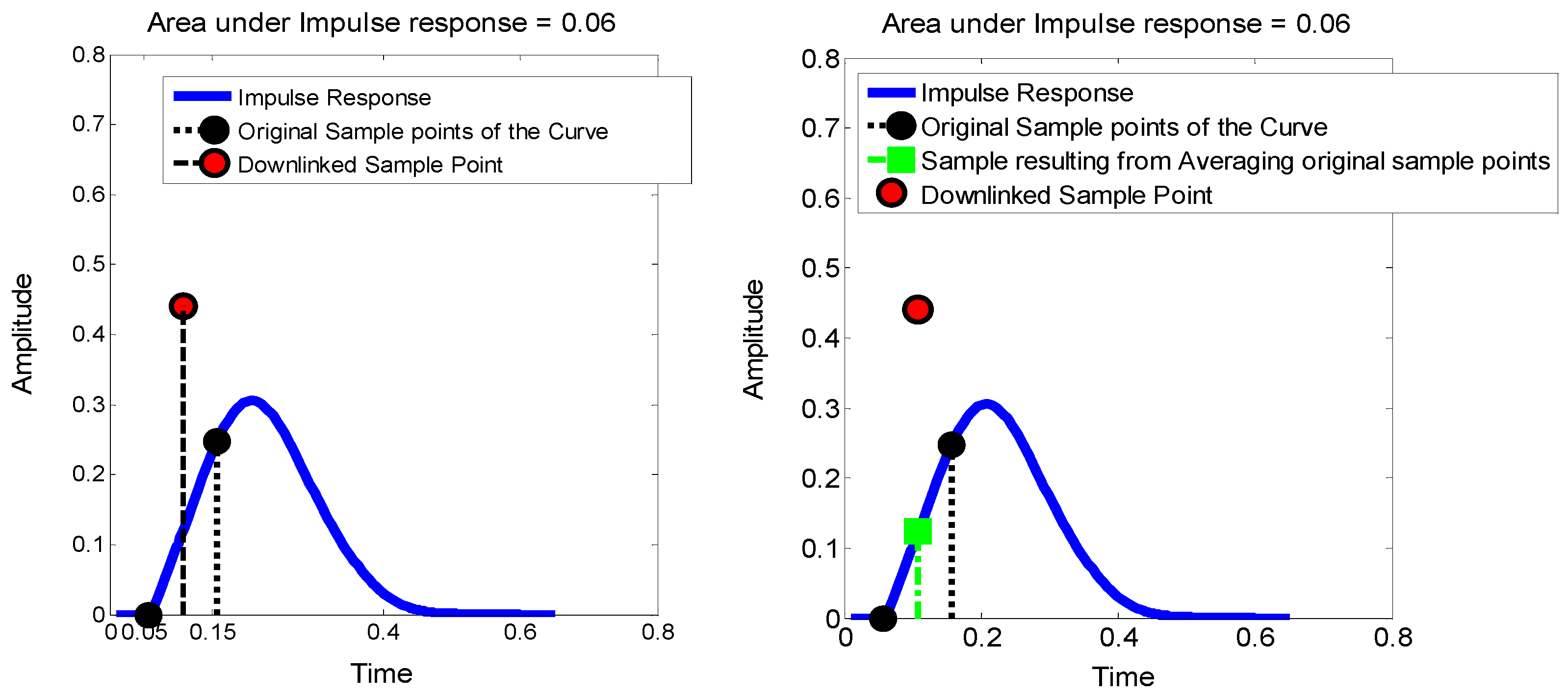
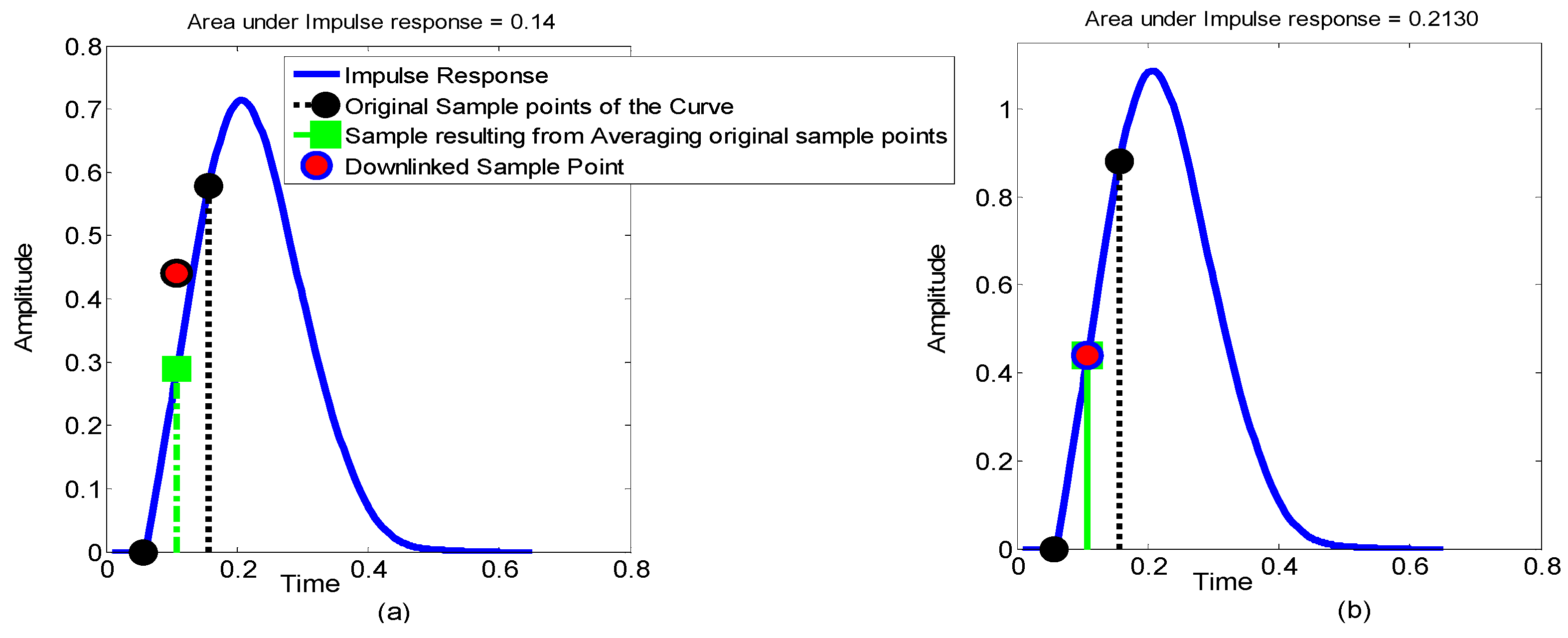
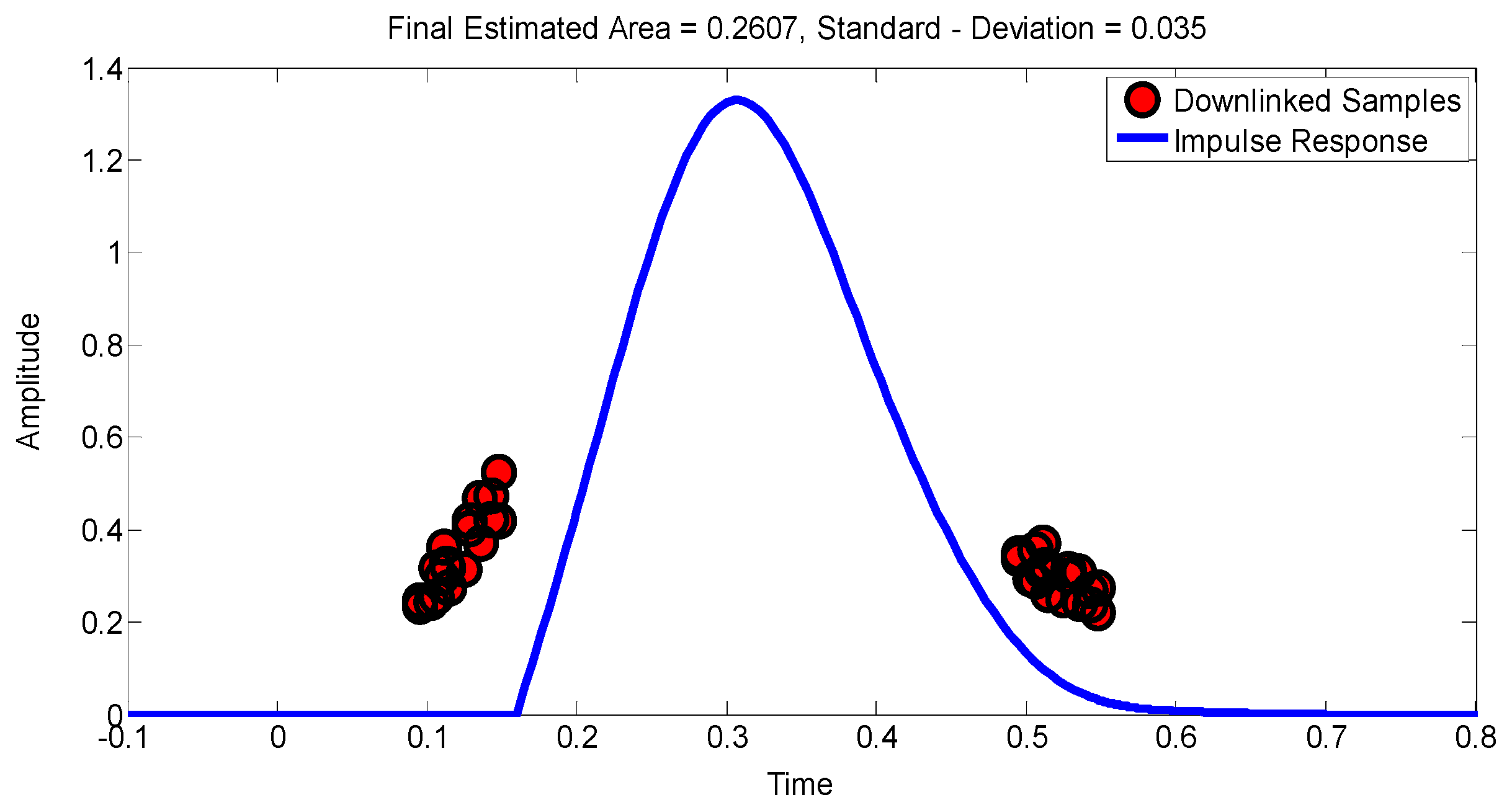
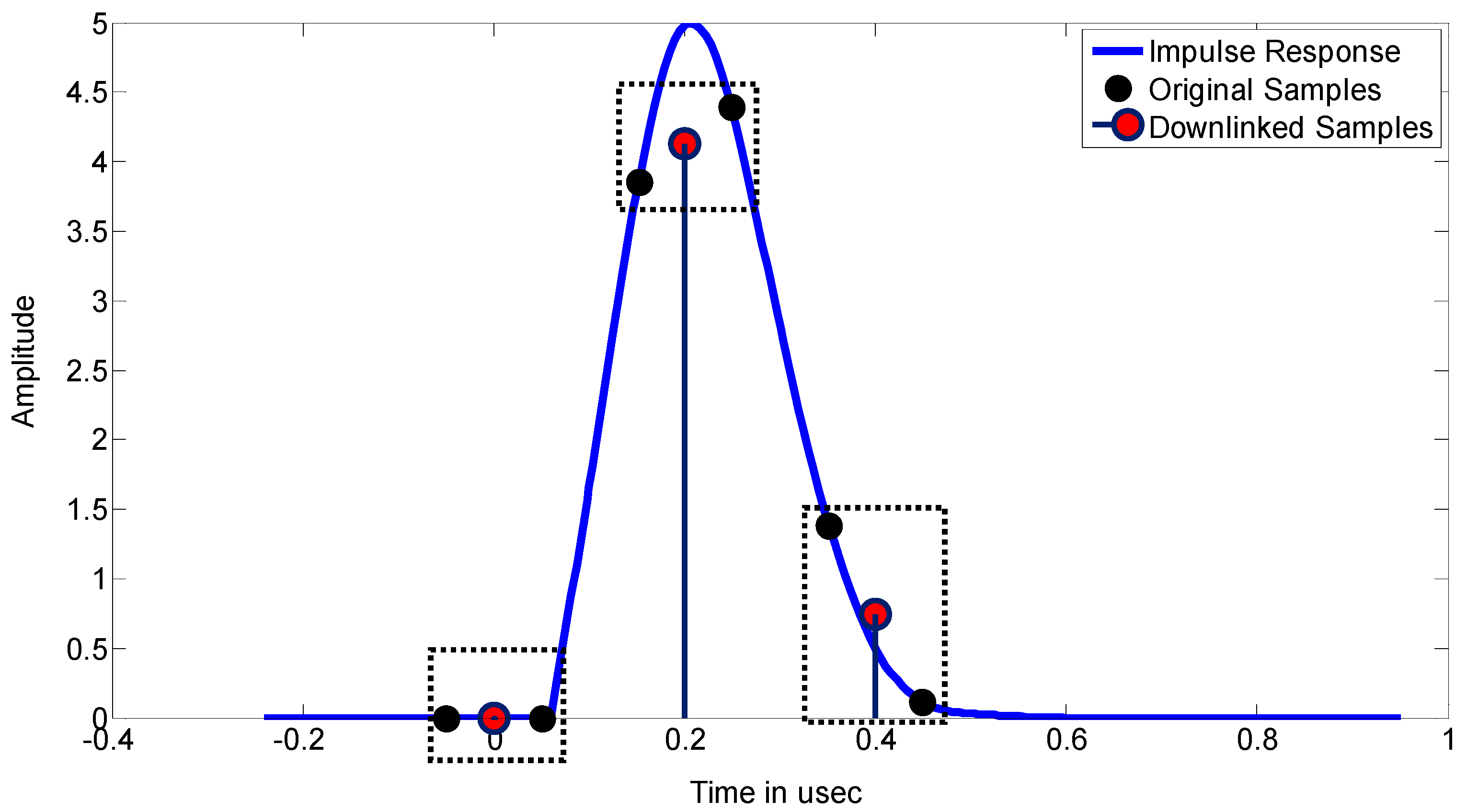
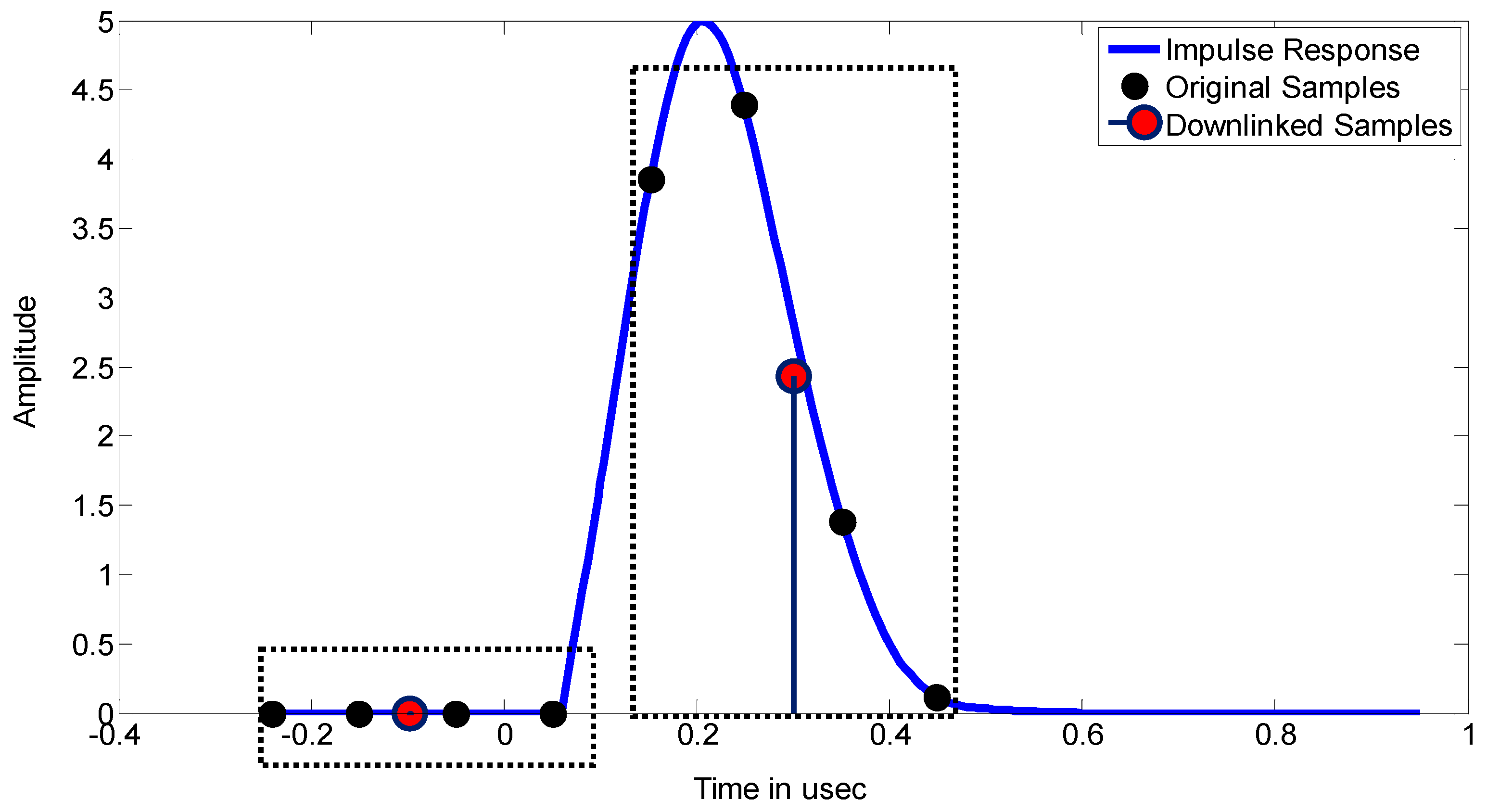
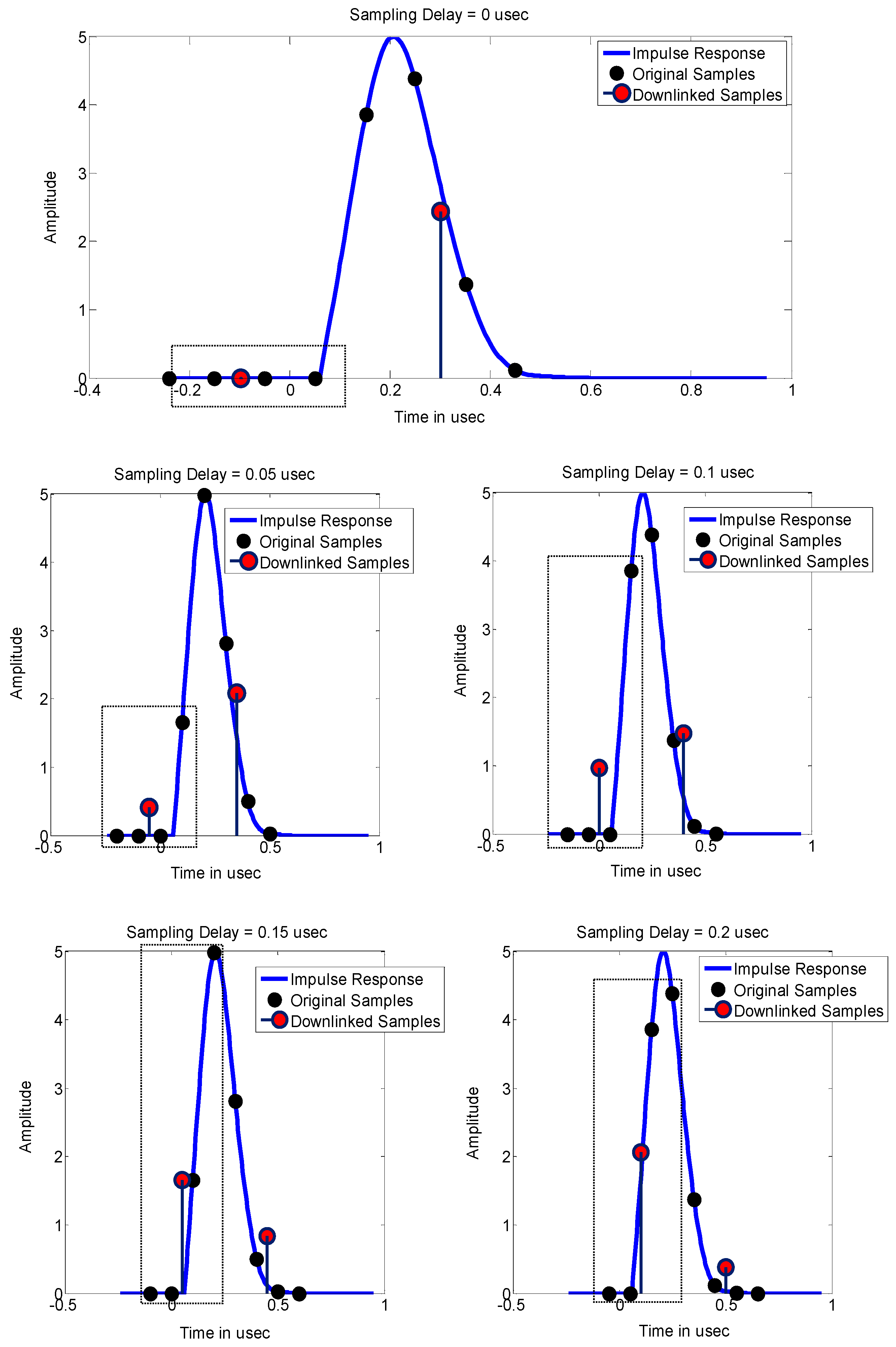
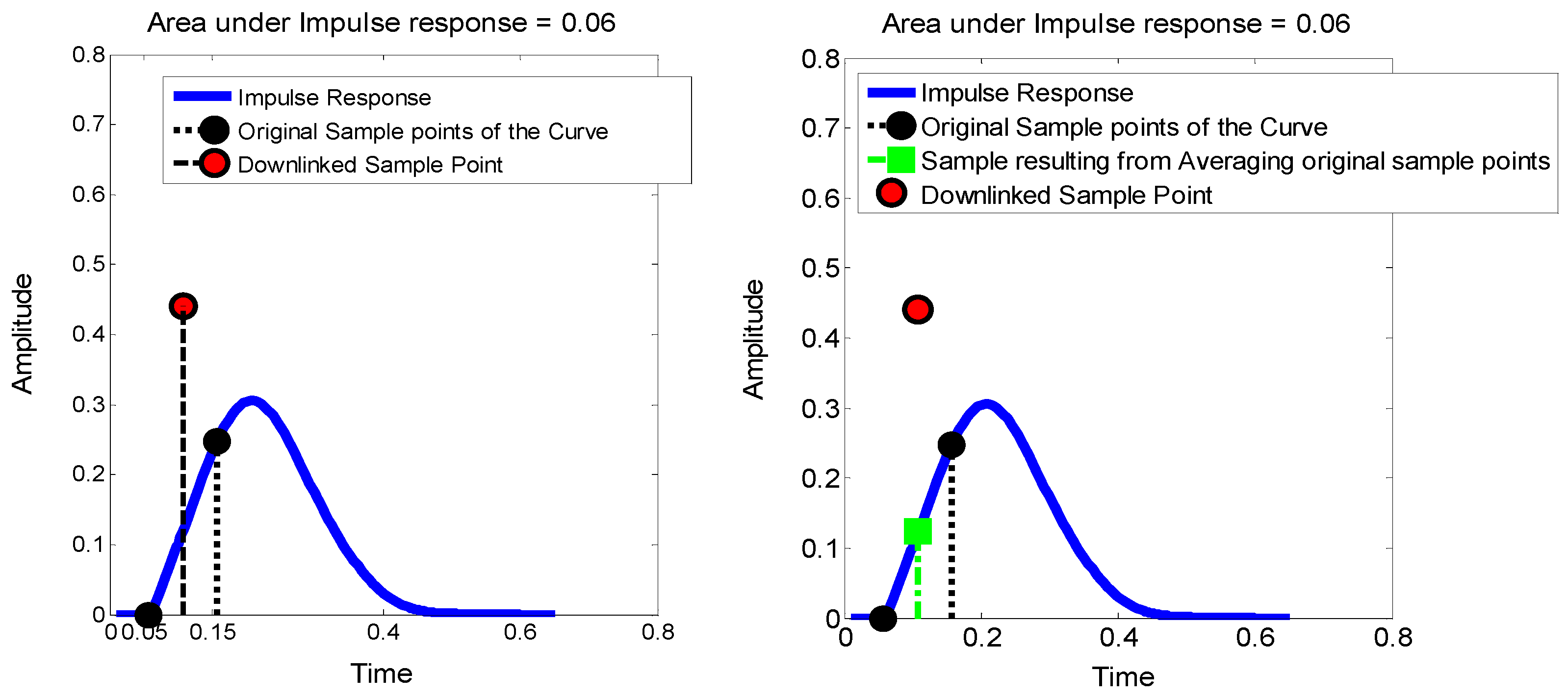
Figure 15. As described earlier in the previous section regarding
Figure 12 and
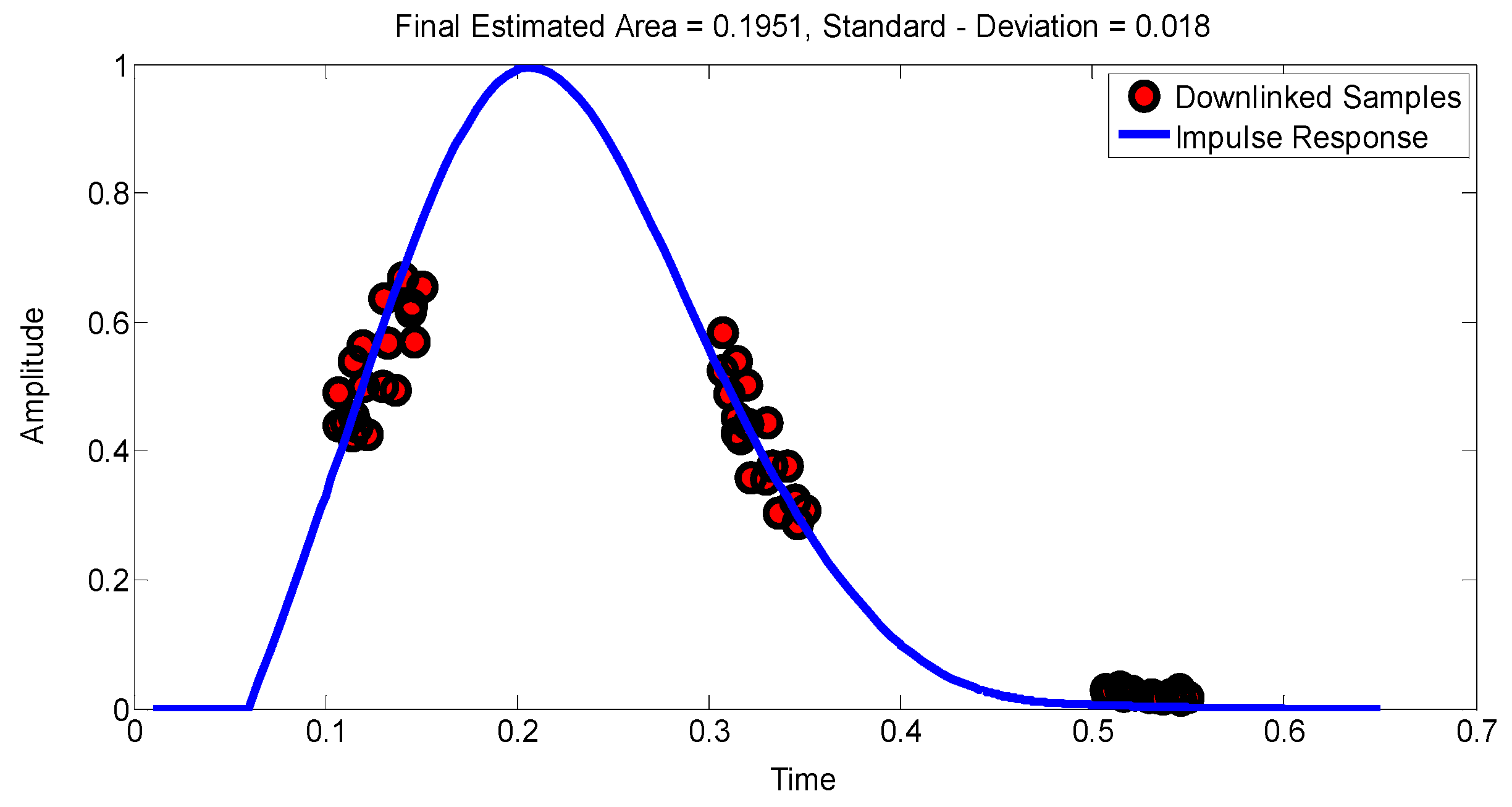
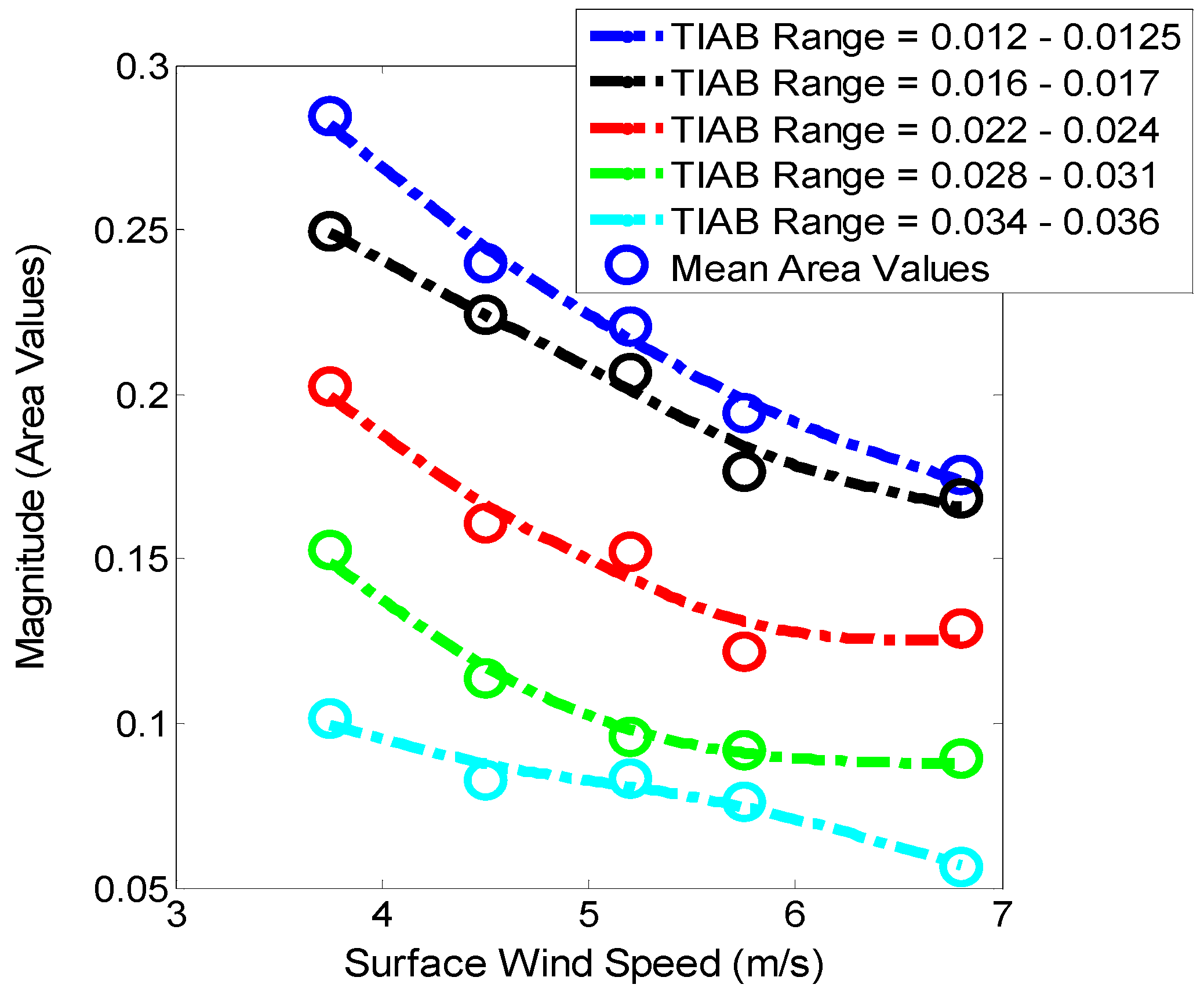
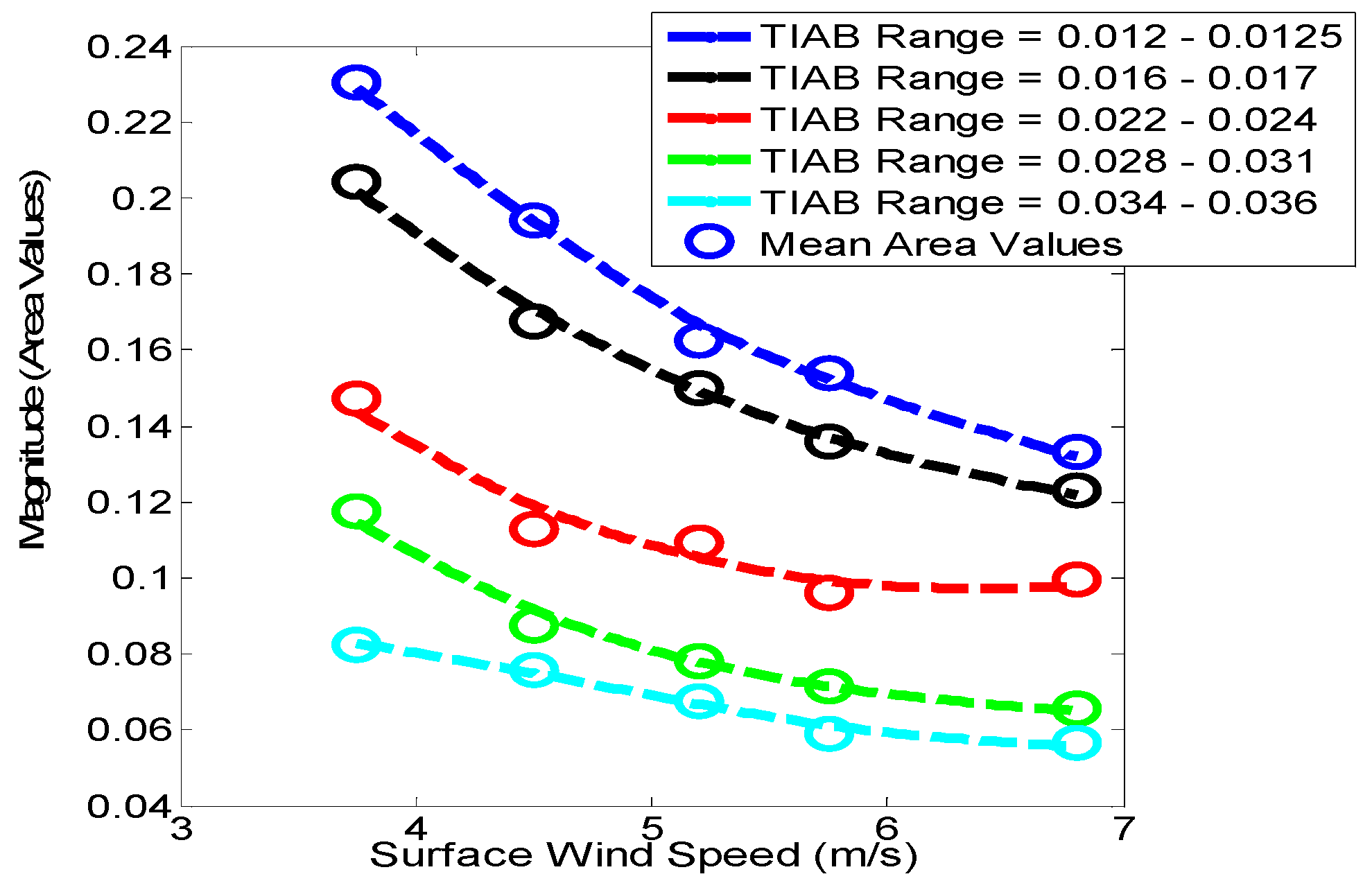
Figure 13, the response curve is the fit to the mean area determined from the average of the areas of all the retained down-linked samples in a group. For each grouping, the final estimated mean area and standard deviation, original number of surface returns/samples in the group and the number of surface returns/samples retained after data screening, are also provided. The areas and standard deviations for all the Southern Pacific Ocean 532 nm data groupings are given in
Table 1, and
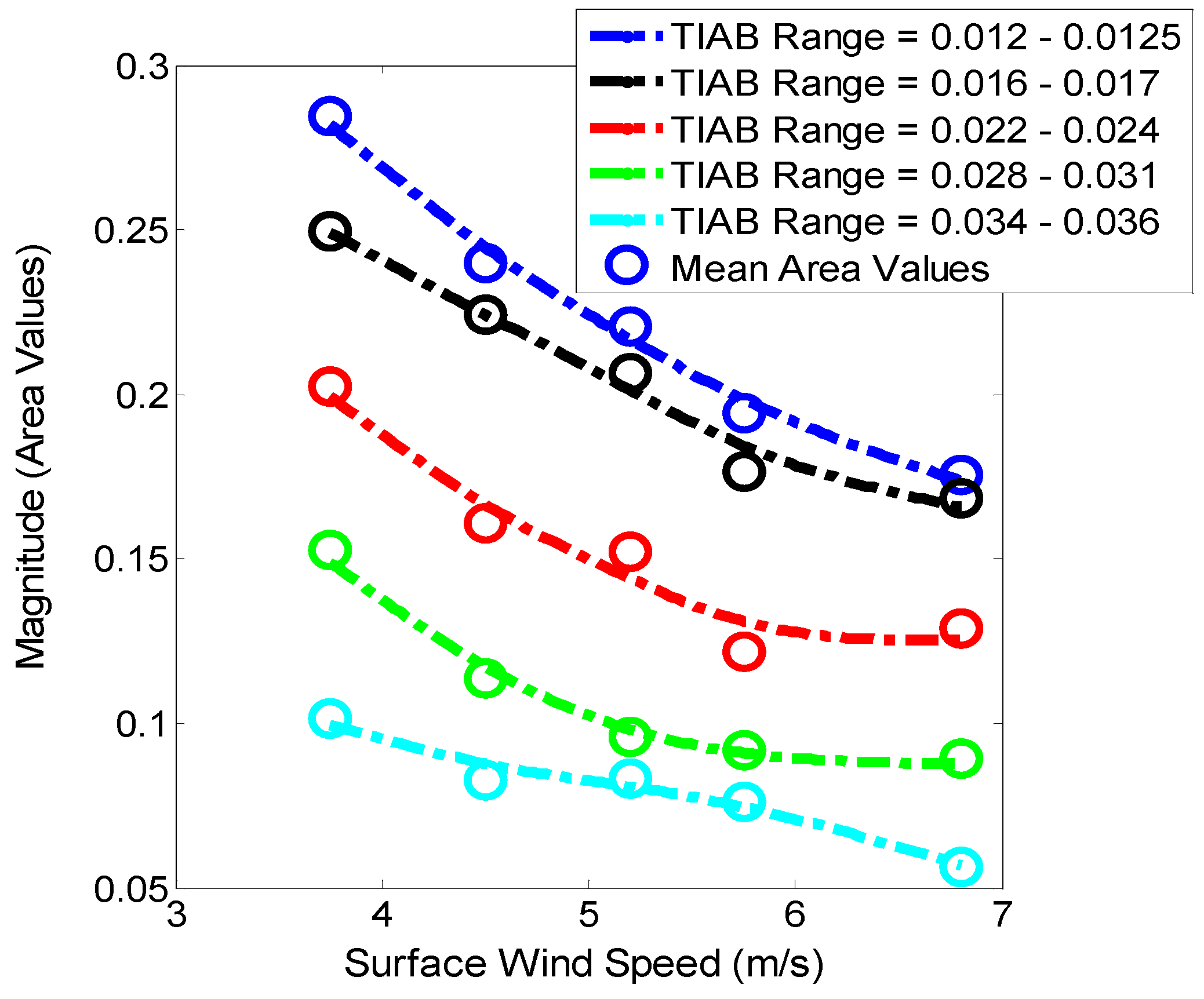
Figure 16 shows plots of these areas versus wind speed for each TIAB range. As expected, it can be seen from the figure that the areas progressively decrease with increasing TIAB. Corresponding results for the 1064 nm channel are given in
Table 2 and
Figure 17. Similarly, the results for the Atlantic Ocean data analysis are given in
Table 3 and
Table 4, and the results for the Indian Ocean data analysis are given in
Table 5 and
Table 6 (the SR impulse response curve fits like those given in
Figure 15 are not repeated for the Southern Pacific Ocean 1064 nm channel data or for the two channels for the other ocean regions as they all proved similar. Also, figures like
Figure 16 and
Figure 17 are not repeated for the other ocean regions as they also all proved similar). As can be seen in
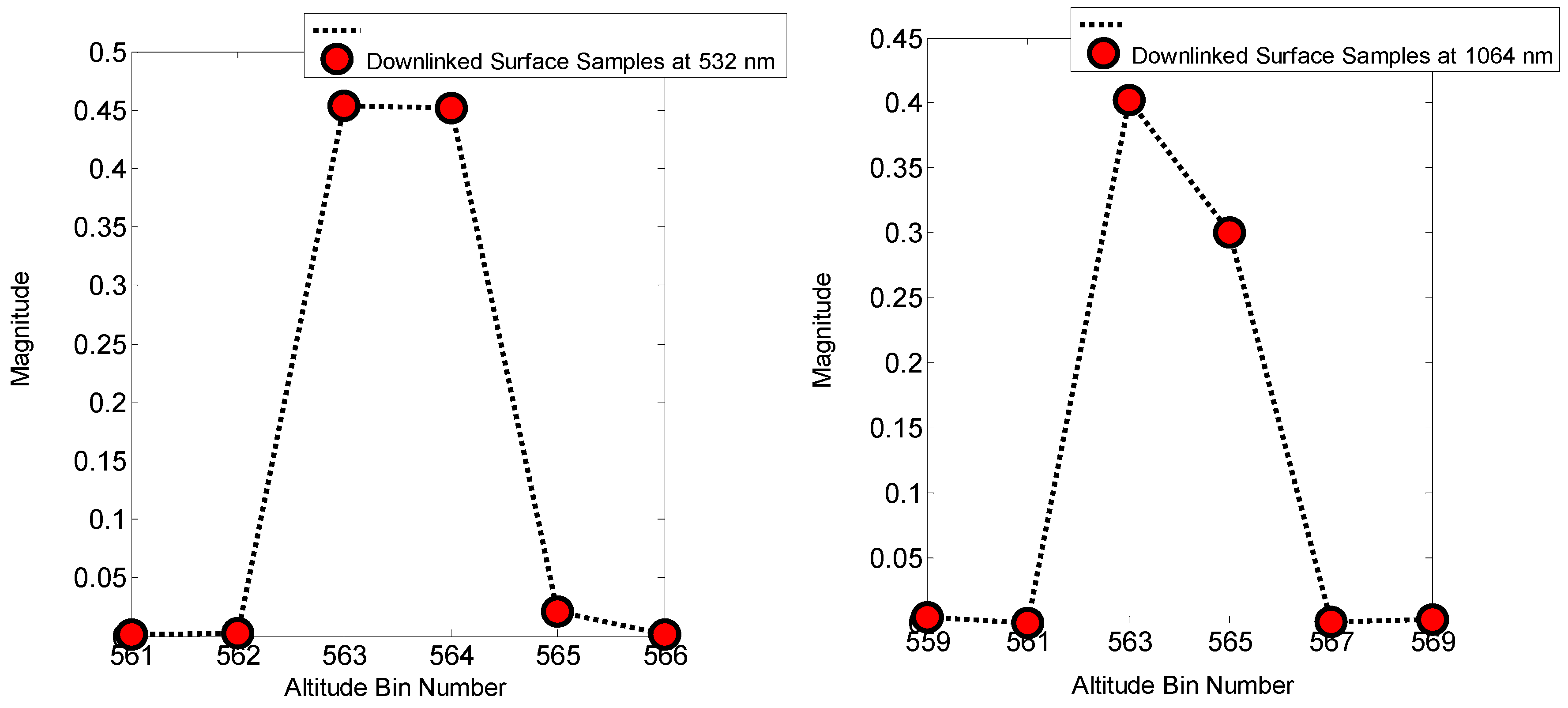
Figure 15 (and in the results obtained for curve fits for all ocean regions and both wavelengths) the greatest number of available down-linked samples/retained samples occurred at the lowest TIAB values (i.e., the lowest aerosol optical depth (AOD) values), indicating low AODs occurred most frequently.
From the several tables and figures, it can be seen that the data binning increments yielded tightly clustered areas for all groupings, the percent standard deviations for which ranged from a high of ~20% (one was as high as 23%) to a low of ~3%. For each channel/ocean region, the percent standard deviation of the areas was less than 12% for more than half the groupings (anywhere from 52% to 68%). The percentage of samples retained for the groupings was generally >~75%. The number of retained samples was >~100 for over 70% of the groupings, with only four groupings having <~50 samples (28 being the lowest). Thus, there were enough samples for good statistics in almost all cases. No trends of note were exhibited in the area standard deviations insofar as retained sample size, TIAB value and wind speed value. The estimated area statistics were found to be quite similar for both channels and all three ocean regions. Here it important to emphasize that the area standard deviations stem from a number contributions including (a) random signal noise; (b) temporal-spatial variability in signals assigned to a given finite size bin (recall that signals in a bin are not necessarily contiguous in space, time or stem from one aerosol type); (c) possible uncertainty in the wind speeds used to assign signals to a given bin; and (d) any error in calibration normalized out of the attenuated backscatter signals that were analyzed to obtain the areas. The fact noted above that the estimated area percent standard deviation was <12% for the majority of the groupings is relevant in that it implies the same fractional uncertainty (±0.12) for retrieving the aerosol round-trip transmittance, , which in turn implies half that uncertainty for retrieving the Aerosol Optical Depth (AOD), or ±0.06; there will be more on this in a later sub-section. One would expect these uncertainties to be lower for a collection of contiguous/nearly contiguous shots from a localized spatial region with constant wind speed and fixed aerosol loading. To what extent such conditions may be met can be assessed by examining the statistics of areas retrieved for individual shots and running mean areas for various averaging intervals. Example retrievals along short orbit segments given later in the paper demonstrate that such averaging over fairly homogeneous aerosol regions indeed yields significantly lower uncertainties in the averaged AOD retrievals (although bias error may still be present).
3.3. Verification of Area Retrievals
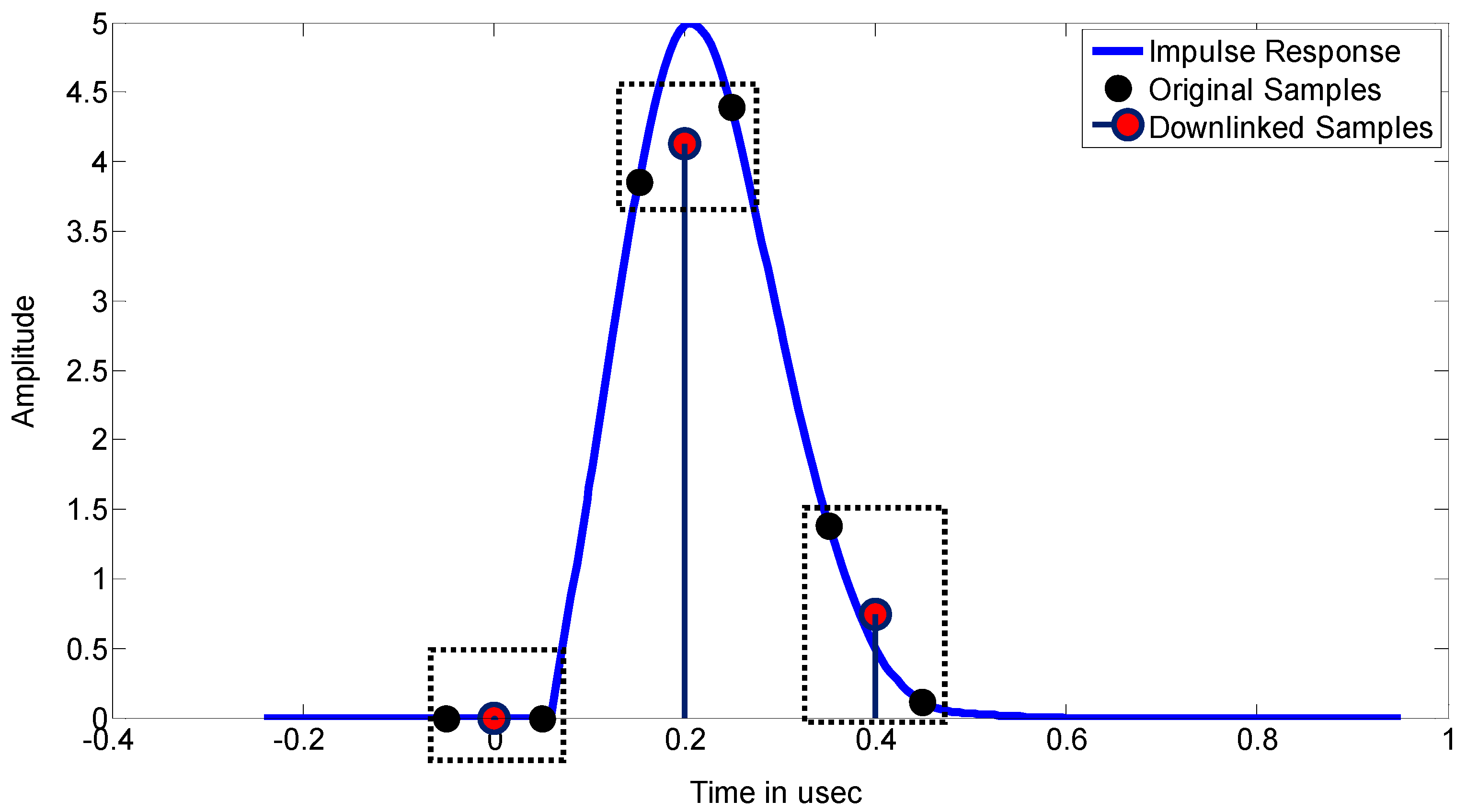
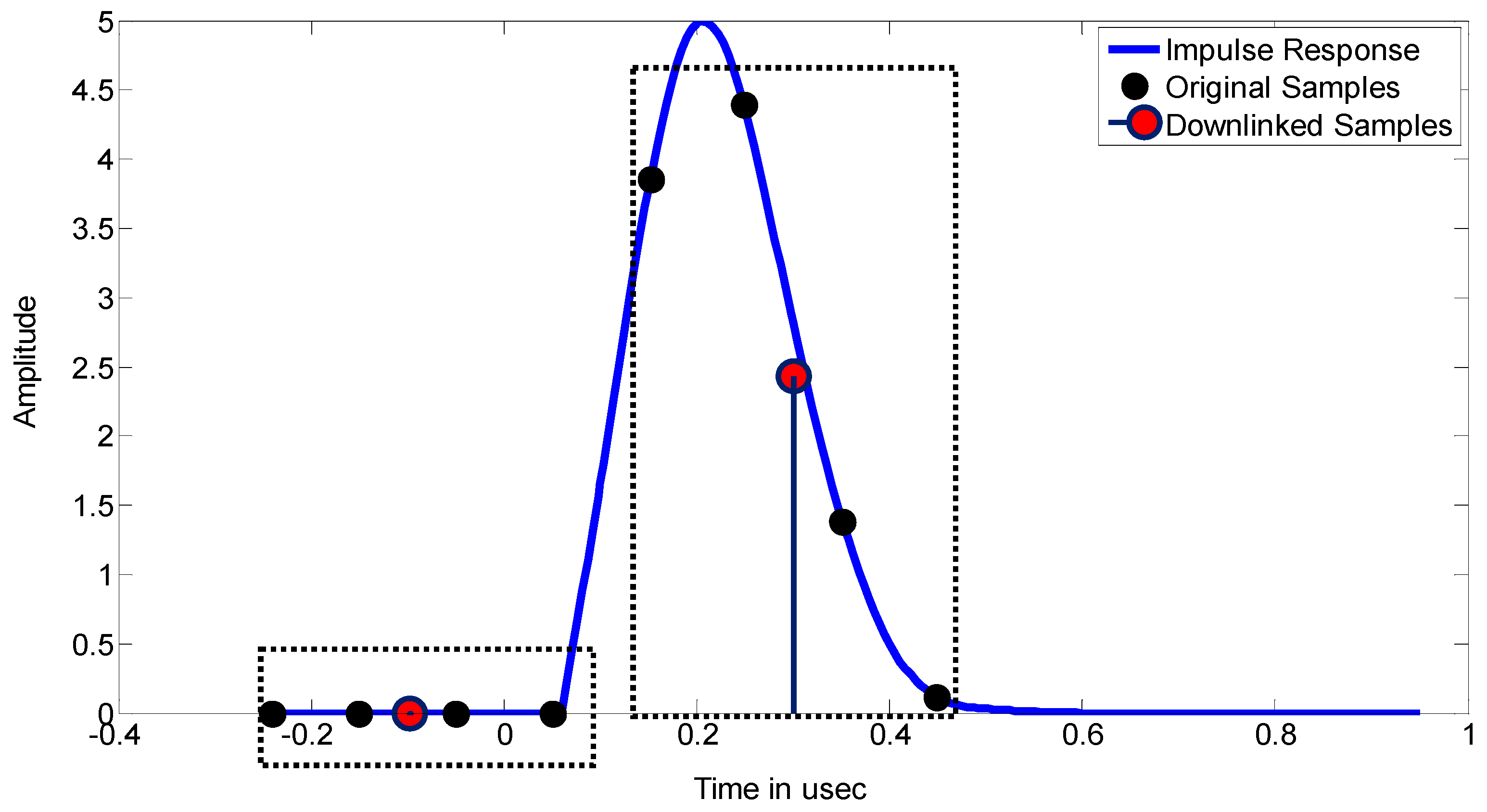
The SR area retrievals presented in the previous sub-section were estimated by a fitting procedure, described earlier in
Section 2.5, wherein an assumed normalized impulse response curve was positioned and fitted to the down-linked SR samples for each shot, the curve fit determining the SR area for the shot. The individual estimated shot areas were grouped with areas for other shots with nearly the same TIAB and wind speed and, after screening for outliers, the retained group areas were averaged to obtain the estimated SR mean area for the group and associated standard deviation. Alternatively, SR areas may be predicted by the derived analytic relation for
given in Equation (5), repeated here below with the round-trip transmission,
, resolved into the aerosol, Rayleigh and ozone components as was done in Equation (10).
To predict
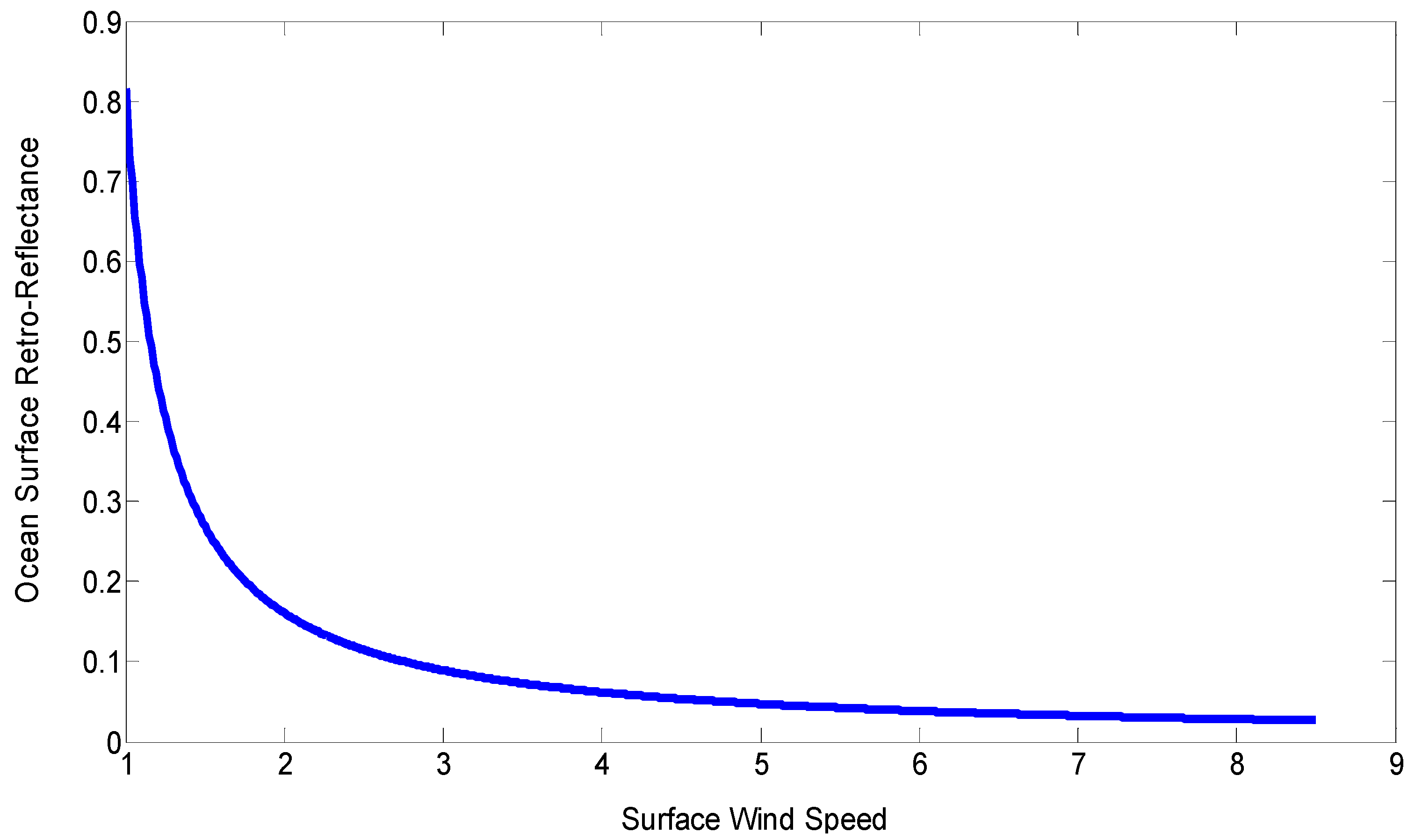
from this analytic relation requires specification of
, which can be computed from the wind speed model and the wind speed data for a given shot in the CALIPSO data base, as well as
. The Rayleigh and ozone round-trip transmissions are fairly constant over oceans and can be computed from the information in the CALIPSO data base, the product of which for 532 nm is to a very close approximation
= 0.798 × 0.96 = 0.76. The Rayleigh and ozone attenuations for 1064 nm are quite small so that
= ~1 is a reasonable approximation.
is generally unknown, but by selecting data for the aerosol free, clean atmospheres (for 532 nm TIAB < 0.0125), it can be approximated as unity. Thus, for data with TIAB < 0.0125,
may be approximated for 532 nm as
and for 1064 nm as
Computing analytically predicted areas (APA) by these relations for the various wind speed bins defined earlier (mean wind of each wind speed bin used to calculate
) and using the data-estimated areas (DEA) presented earlier (e.g.,
Table 1) for these wind speed bins and TIAB < 0.0125, a comparison may be made of the two sets of area determinations as shown in
Table 7 for the Southern Pacific Ocean data collection.
It can be seen that the ratios of DEA/APA are close to one and well within the DEA standard deviations. Similar results were found for the Atlantic and Indian Ocean ratios as shown in
Table 8 (The DEA bin values are not repeated, but can be found in
Table 3,
Table 4,
Table 5 and
Table 6 nor are the APA bin values as they are same for all oceans). Averaging the ratios over all wind speeds yields the results shown in
Table 9 and
Table 10.
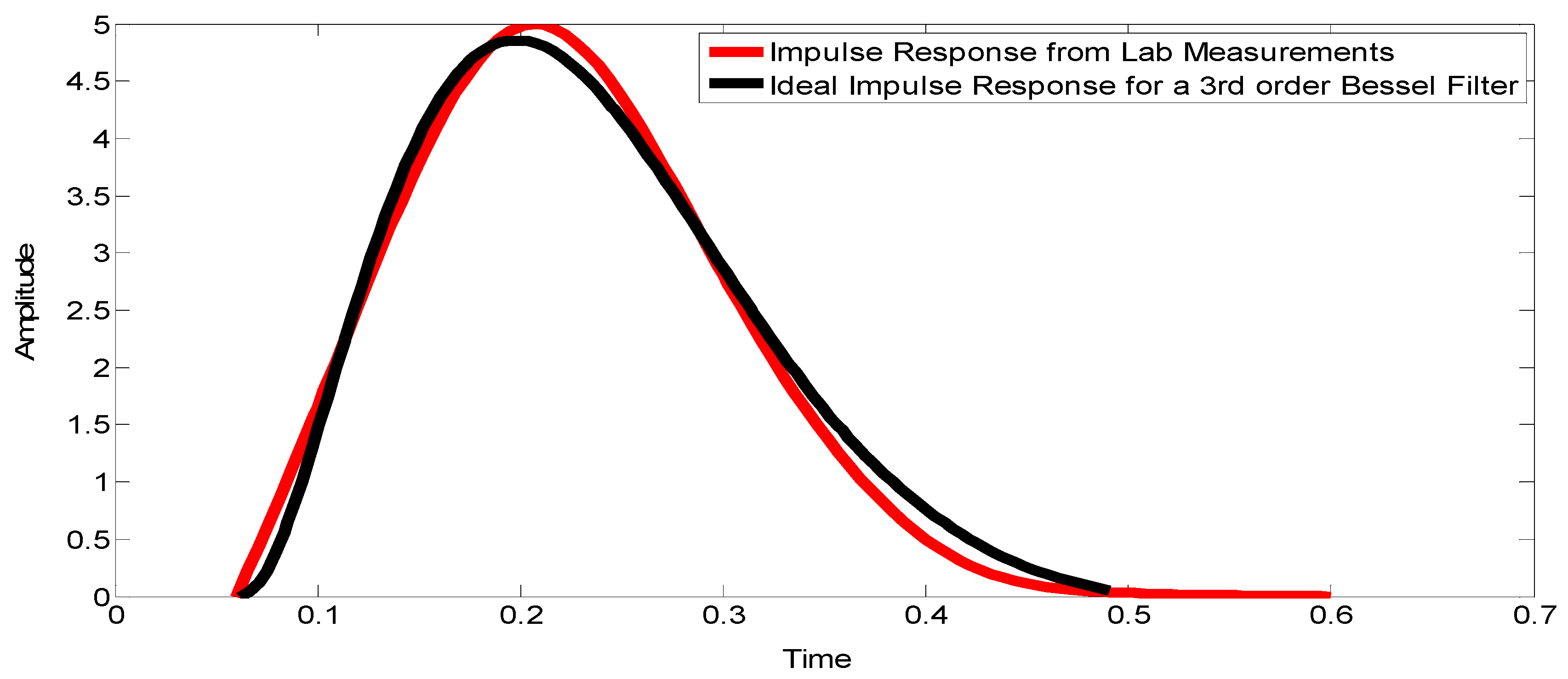
It can be seen for the 1064 nm channel that the ratios for all oceans are within 1% of unity, while the results for the 532 nm channel fall within 4% of unity, indicating perhaps a slight bias off-set to lower DEA values, although the ratios are generally within their standard deviations. Such a bias could arise due to some aerosol contamination in the 532 nm signals assumed to be aerosol free for TIAB < 0.0125, or if the impulse response assumed for the 532 nm channel was slightly different than the actual impulse response for that channel, or possible error either in the lidar calibration or the reflectance model/wind speed input to the model. No such bias is suggested for the 1064 nm channel, indicating an absence of any significant effect from lidar calibration error or the reflectance model/wind speed input to the model having caused a bias (which would also affect the 532 nm results, thereby seemingly removing these errors as the source of the 532 nm off-set). Hence, the slight deviations from unity for either wavelength, being within there standard deviations, may just stem from normally expected variability. All in all, the agreement between the data estimated and analytically predicted areas is excellent, indicating corroboration of the technique and results presented earlier for estimating the area of SR signals from the down-linked SR samples.
3.4. Aerosol Retrievals
Rearranging Equation (13),
is given by
Using the approximations given earlier for
, Equation (16) reduces, for both wavelengths, to
In turn, the aerosol optical depth (AOD), τ
a, is given by
By differential analysis, the fractional uncertainty in
due to uncertainty in
is
and the corresponding uncertainty in AOD is half that,
Example retrievals of
and AOD by Equations (16) and (19) applied to the
retrievals given earlier (
Table 1,
Table 2,
Table 3,
Table 4,
Table 5 and
Table 6), for one wind speed bin (5.1–5.3 m/s) and two TIAB bins (0.016–0.017 and 0.028–0.031), for all three ocean regions, are given in
Table 11,
Table 12 and
Table 13. Also given in the tables are retrievals by an alternate method, called the High/Low method.
As the ratio of
for two different TIAB values and the same wind speed equals the corresponding ratio of
, the aerosol round-trip transmission for a high TIAB,
(high TIAB), is given by
Selecting the low TIAB to be for the clean, aerosol-free atmosphere case (TIAB < 0.0125) for which the aerosol round-trip transmission is approximated as unity,
simply equals the ratio
. An advantage of the High/Low method is that it eliminates the need for an accurate surface reflectance-wind speed model as the reflectance cancels in the area ratio, although the standard deviation for the retrieved aerosol round-trip transmission is generally a little higher than for the analytic method because the standard deviation of each of the areas in the ratio must be taken into account. It can be seen from the tables that the
retrievals for both methods agree well within their respective standard deviations (most within ~0.05) and the AODs agree within ~0.05 (most within ~0.03). This, as with the results in
Table 9 and
Table 10, again suggests that errors in either the reflectance model/wind speed inputs to the model for determining the analytically determined AODs or lidar calibration error (which could affect the High/Low determinations) were not significant. The results for the other wind speed and TIAB bins are similar insofar as having about the same variability/uncertainty in retrieved
and AOD. The AOD uncertainty is comparable to the AOD retrievals for the lower TIAB (0.016 to 0.017), making it difficult to quantitatively interpret these AOD, but the higher TIAB (0.028 to 0.031) AODs generally appear good enough to be quantitatively useful. Examination of the AOD spectral ratio (532/1064) revealed that this ratio ranged from about 1.05 to 1.2, most being 1.1 or greater, which is within the range of the ratios for dust and marine aerosol models (e.g., [
15]). The CALIPSO browse images for the ~15 days and regions for the observations investigated here revealed that the aerosols were mainly identified as marine aerosols.
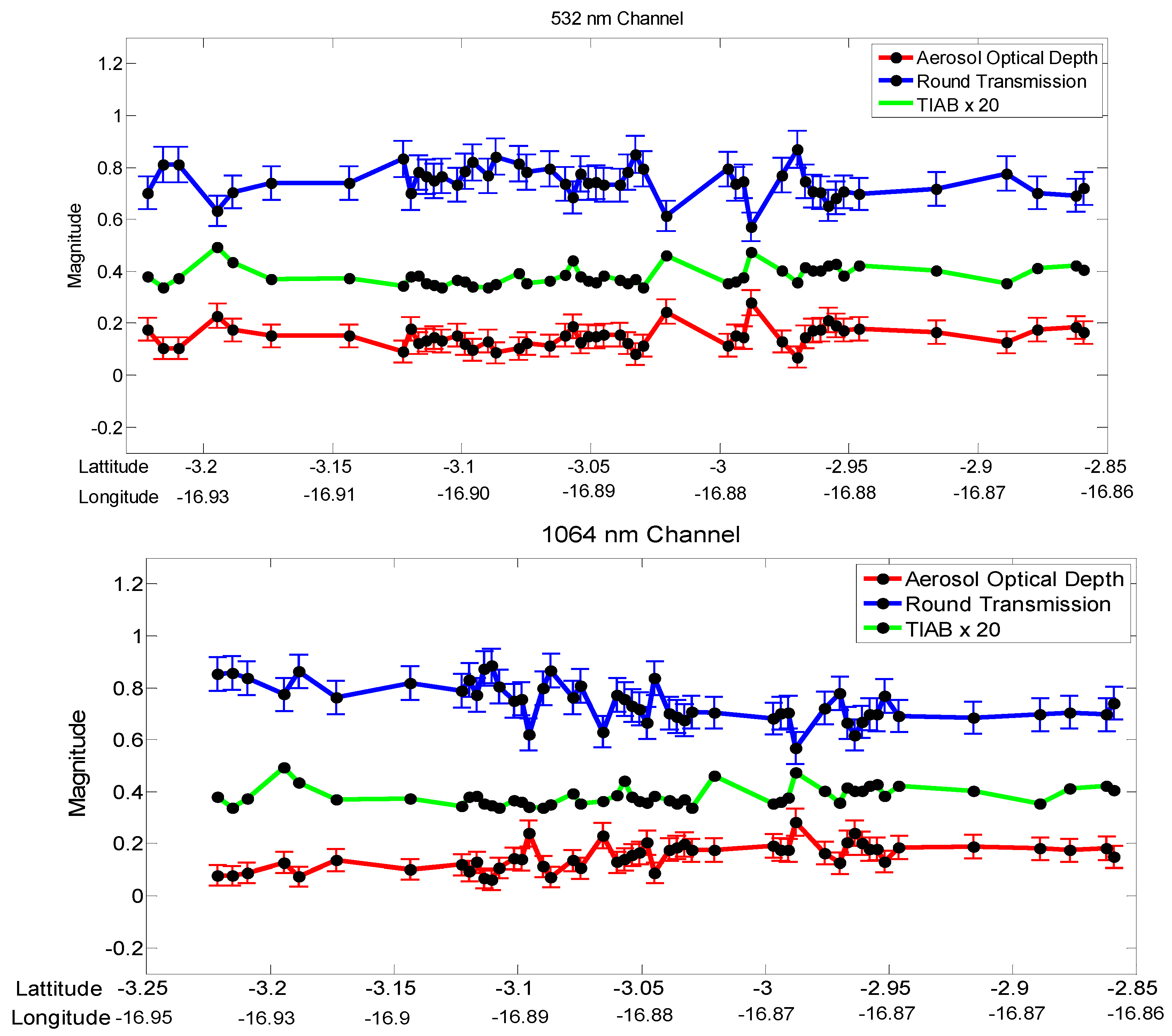
Equations (16) and (19) were used to retrieve the AOD for a sample collection of ~50 nearly contiguous lidar shots for an orbit segment over the Atlantic Ocean. These shots were for a 9 May 2011 segment between the lat-lon positions (−3.3 lat, −16.96 lon) and (−2.85 lat, −16.86 lon), which corresponds to about ~75 shots, amongst which ~50 had detectable surface returns (with 0.0125 < TIAB < 0.035).
Figure 18 shows the per-shot retrievals of
and AOD for both wavelengths, and the TIAB times 20 (to be on scale) is also shown. The correlation of TIAB with AOD and anti-correlation with
is clearly evident. The mean AODs are about the same for both wavelengths (0.155 for 532 nm and 0.148 for 1064 nm, each with a standard deviation uncertainty of ±0.045). The AOD is fairly flat over the segment for 532 nm, but displays a slight rising trend for 1064 nm. As such, averaging over several shots should reduce the per-shot AOD uncertainty (~±0.05); averaging over six consecutive shots (2 km averaging) reduced the AOD uncertainty to <±0.02 for the averaged AODs. The spectral ratio (1064/532) of
has a mean of ~1.01, ranging from ~0.96 to ~1.12, while for AOD the mean spectral ratio is ~1.04, ranging from ~0.70 to ~1.15 (rather variable). Clearly, the mean spectral ratios are fairly neutral, and the mean AOD ratio is close to the range that applies to dust and marine aerosols (e.g., [
15]). Examining the CALIPSO browse image for this segment revealed that the aerosols present were indeed mainly identified as marine aerosols.
The spectral ratio of aerosol round-trip transmission is of further interest because it can be estimated directly from the spectral ratio of the
without having to assume a particular wind speed model, save accounting for the difference in Fresnel reflectance due to the ocean refractive index difference at the two wavelengths. From Equation (13), the spectral ratio (1064/532) of
, using the numerical estimates for the round-trip Rayleigh and ozone transmittances given earlier, reduces to
Assuming the reflectances are equal at each wavelength, except for the refractive index difference in the Fresnel reflectances, having a spectral ratio of ~1/1.06 (for 1064 to 532), Equation (23) reduces to
For the clean, aerosol-free situation (TIAB < 0.0125), the aerosol transmission spectral ratio reduces to unity and the
spectral ratio is simply 1.241. Examining the
values for 1064 nm and 532 nm given earlier in
Table 1,
Table 2,
Table 3,
Table 4,
Table 5 and
Table 6, for TIAB < 0.0125 and averaging overall wind speeds per ocean region, yields mean area spectral ratios,
, of
1.283,
1.281 and
1.248 for the Southern Pacific Ocean, Atlantic Ocean and Indian Ocean, respectively, all within ~3% of the 1.241 value, substantiating the validity of the analytic relation given in Equation (24). This ~3% difference, as with the ~4% difference noted regarding the 532 nm results in
Table 7, could arise due to some aerosol contamination or the assumed impulse response curve for the 532 nm channel being slightly different than the actual impulse response for that channel. Examining the
spectral ratios for all wind speed bins and for bins with TIAB > 0.0125 in
Table 1,
Table 2,
Table 3,
Table 4,
Table 5 and
Table 6, shows that ~90% of the
ratios are >1, meaning AOD
532 > AOD
1064 almost always, and that these ratios are bounded by
(with ~70% being between 1.0 and 1.1). Note that retrieving the spectral aerosol round-trip transmittance ratio does not yield the individual wavelength AODs, just the difference, AOD
532 − AOD
1064 [
8]. Nevertheless, if AOD can be retrieved at only one wavelength, the other can be found knowing this difference, and knowing the difference could be a useful constraint with other techniques for retrieving AOD or identifying aerosol types.
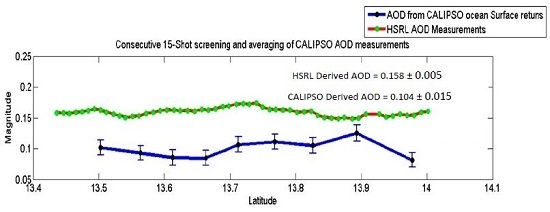
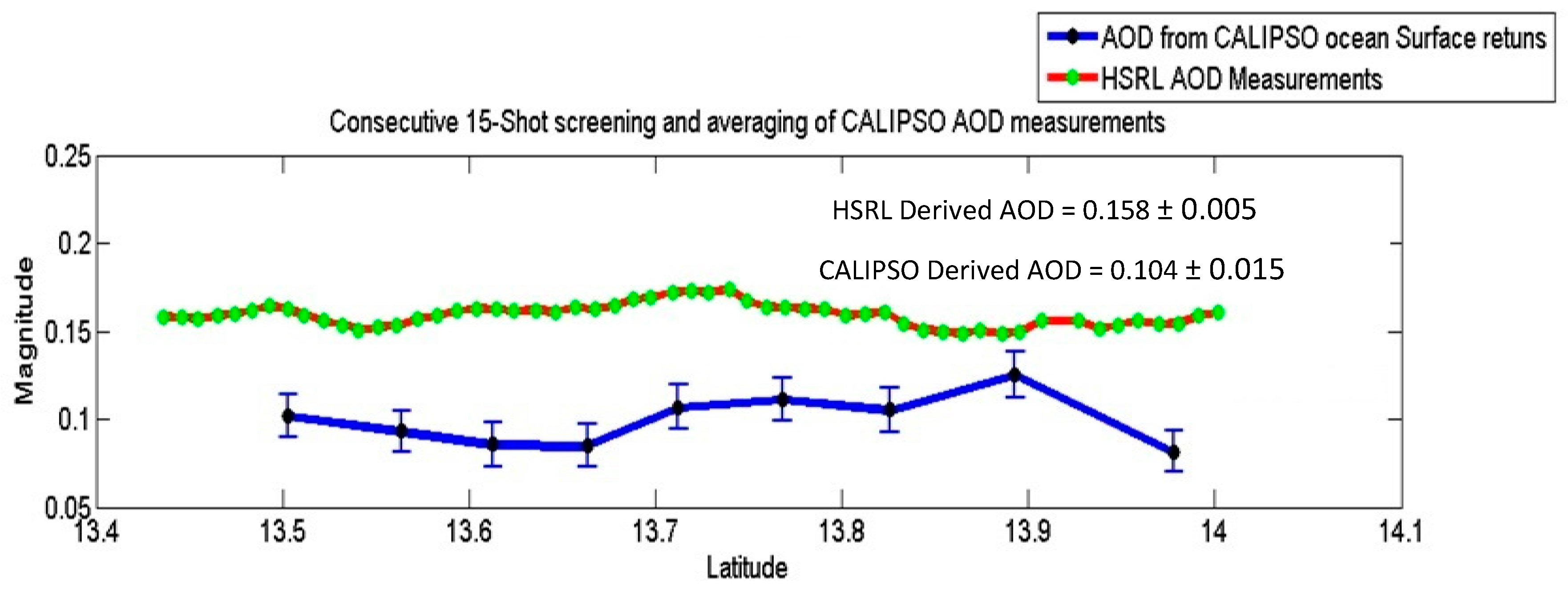
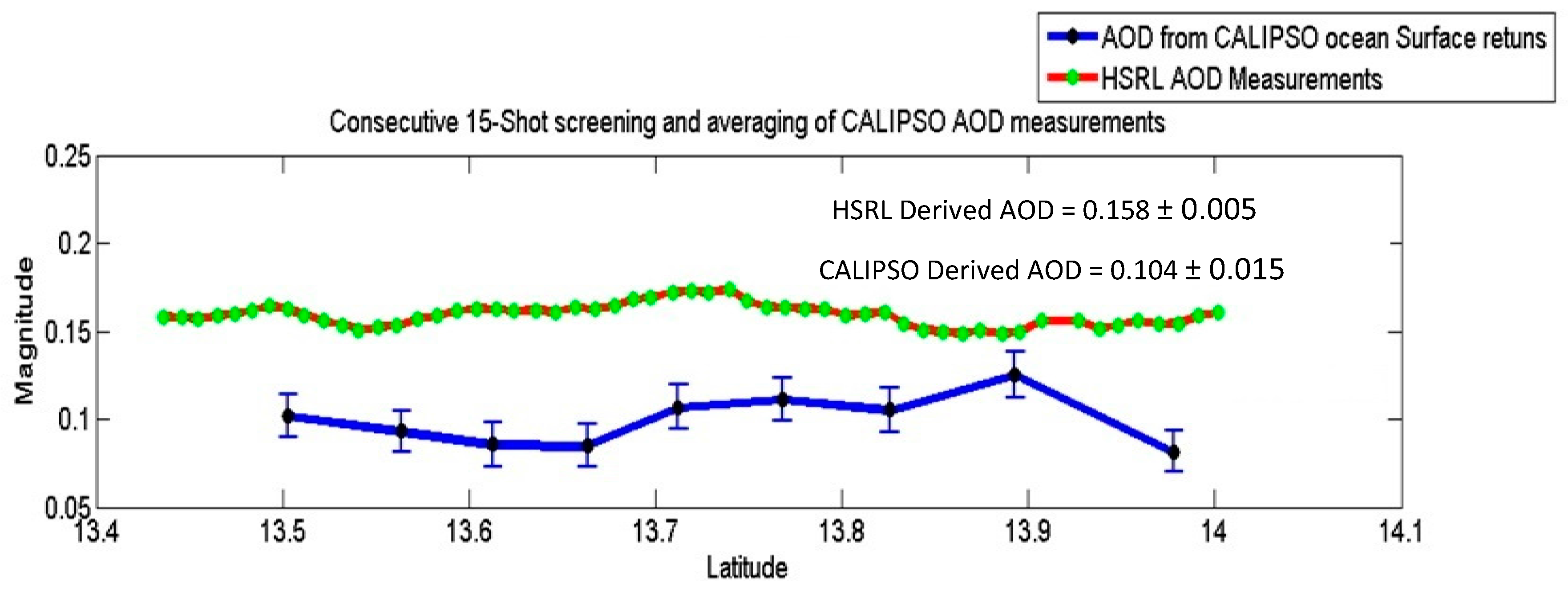
A final example of AOD retrieval along a CALIPSO orbit segment on 22 August 2010 is shown in
Figure 19 from combined CALIPSO and under-orbit airborne HSRL measurements during the Caribbean Campaign [
16] in August 2010. The NASA Langley airborne HSRL [
17] can retrieve the AOD at 532 nm directly by the high spectral resolution lidar (HSRL) technique, providing a truth comparison with the lidar surface return AOD retrieval technique (HSRL uncertainty in AOD retrievals given in
Figure 19 is estimated to be <±0.005 based on HSRL retrieval comparisons with both airborne sun-photometer and ground-based AERONET measurements [
16], and this is the uncertainty obtained by averaging the HSRL retrievals over the latitude range shown in
Figure 19). The shot-by-shot CALIOP AOD retrievals displayed some large spiking (8 of the ~120 shots in the segment), likely due to pre-cloud/cloud-forming effects as is typical of the Caribbean and as seen in the CALIPSO browse image for this segment (which also showed that the aerosol present was likely from an intrusion of dust), so these were screened and a 15-shot (5 km) average was formed for the CALIPSO-derived curve shown in the figure (yielding a standard deviation of ±0.015). The two retrieval curves track fairly well, and their means agree within ~0.05. As CALIPSO passed over this surface segment within seconds, while the HSRL aircraft took upwards of ~15 min to complete the segment, some spatial-temporal variation between the curves could occur (perhaps as seen in the lat region between 13.9 to 14 degrees), although results by Rogers et al. [
16] indicate negligible difference should occur due to such a small temporal mismatch. This preliminary result of the lidar surface return AOD retrieval technique being capable of retrieving AOD within ~0.05 is regarded as a good start. It compares favorably with the accuracy first reported by Josset et al. [
18] for their retrieval approach using combined CALIPSO and CloudSat ocean surface returns. It is also within the statistically determined difference between CALIPSO-derived AODs, using assumed aerosol models, and HSRL-determined AODs (i.e., standard deviation of CALIPSO model-derived AODs fell within the HSRL AOD determinations for 50% of the comparisons), for many comparisons [
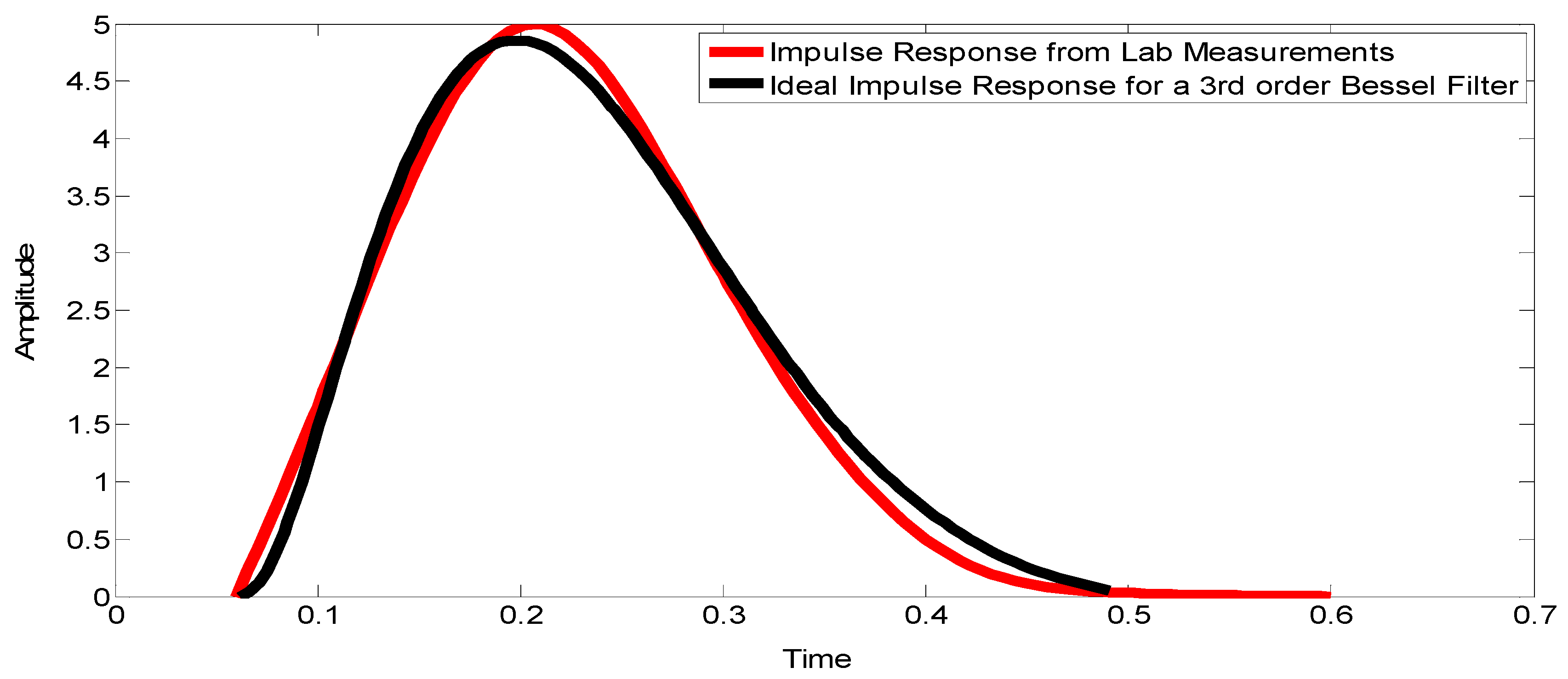
16]. However, an additional point to note regarding this comparison is that subsequent investigation of measurements made of flight hardware replicas of the CALIOP detector and post-detection electronics [
5], as well as on-orbit investigations of surface return signals [
6,
7], when examined on a log scale revealed a slight after-pulsing tail on the measured 532 nm impulse response (such after-pulsing is not uncommon in photomultiplier tube (PMT) detectors), which, if included in the impulse response area integration, could bias
higher and AOD lower. Preliminary investigations to characterize and remove the tail effect by limiting the area determination under the impulse response curve to about the first 400 nanoseconds after the pulse start yielded a higher AOD determination of 0.125 [
19], an AOD increase of 0.021 (or an A
LPF area decrease of 4.2%), which brings the tail-corrected AOD (0.125) to about 0.03 below the HSRL AOD retrieval of 0.158.
Another possible effect which can also bias the A
LPF retrieval too high is a contribution from backscattering in the water below the air-water interface. This effect was not assessed in the initially submitted manuscript, but one of the authors (J. Reagan) was made aware of this possible area contribution (by Chris Hostetler) during a visit to NASA Langley Research Center on 3 November 2016. While water is opaque to 1064 nm light, it is slightly transmissive/transparent at 532 nm, although light at this wavelength is largely extinguished within a few tens of meters below the water surface. To estimate the water backscattering area contribution, A
w, in a form directly comparable to the water reflectance contribution, A
LPF, a number of effects must be taken into account. First of all, the total backscattering from the transmitted lidar pulse as it propagates downward in the water is given by the water Total Integrated Attenuated Backscatter, TIAB
w, for an integration in-water distance, z
w, from 0 at the surface to a distance below the surface where backscattering is effectively nil (a few 10 s of meters). Treating the water backscatter, β
w, as effectively constant over the short penetration distance and the water extinction as S
wβ
w, where S
w is the water extinction-to-backscatter ratio, TIAB
w reduces to simply 1/2S
w. As the propagation is in water, the speed of propagation is 2c/n; where n is the water refractive index (1.33), a factor of 2n/c should be multiplied times TIAB
w, analogous to the 2/c term in Equation (5) for A
LPF. A transmission loss occurs as the laser pulse transmits into water and backscatter exits the water because the air-water transmittance, T
aw = (1 − R
532), is <1, causing an additional loss (1 − R
532)
2 to be multiplied times the air round-trip transmittance, T
2(z
s). Finally, the backscatter exiting water to air is refracted causing a beam-spreading effect that reduces the radiance seen by the lidar receiver by 1/n
2. Hence, the A
w contribution to the received lidar signal, directly comparable to A
LPF in Equation (5), is given by
including the result that TIAB
w evaluates to 1/2S
w. The ratio of A
w over A
LPF is then simply
Using water parameter values representative of relatively clean open ocean water as given by Churnside [
20] and R
532 for the observation site time (i.e., β
w = ~3 × 10
−4 m
−1·sr
−1, S
w = 175 sr and R
532 = ~0.03 sr
−1), Equation (5) yields a value of ~0.067 (indicating a 6.7% area enhancement to A
LPF due to water backscatter), indicating the AOD retrieval is biased ~0.034 too low. For the assumed parameter values, the water-attenuated backscatter is reduced effectively to zero (within 0.1%) within two of the 532 nm down-linked samples (within 45 m below the surface), meaning the A
w contribution is effectively captured in the same samples determining A
LPF. Adding both the tail effect and water backscatter biases (0.021 + 0.034 = 0.055) yields a bias-corrected AOD (0.104 + 0.055) of 0.159, almost exactly equal to the HSRL AOD retrieval of 0.158. Allowing for even a ±25% variation in the estimated 0.055 bias (due to some possible variation/uncertainty in the assumed parameters) yields a bias-corrected AOD in the range of 0.145 to 0.173, which still falls within the ±0.015 standard deviation estimated (from the 15-shot averaging) for the initial CALIPSO AOD retrieval value (0.104 ± 0.015). Thus, with bias correction, the HSRL and CALIPSO AOD retrievals are found to agree within <±0.02.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}