
Texture-Analysis-Incorporated Wind Parameters Extraction from Rain-Contaminated X-Band Nautical Radar Images



Abstract
:
1. Introduction
2. Texture Analysis
3. Wind Algorithm Incorporating Rain Mitigation
3.1. Data Filtering
3.2. Wind Extraction Method
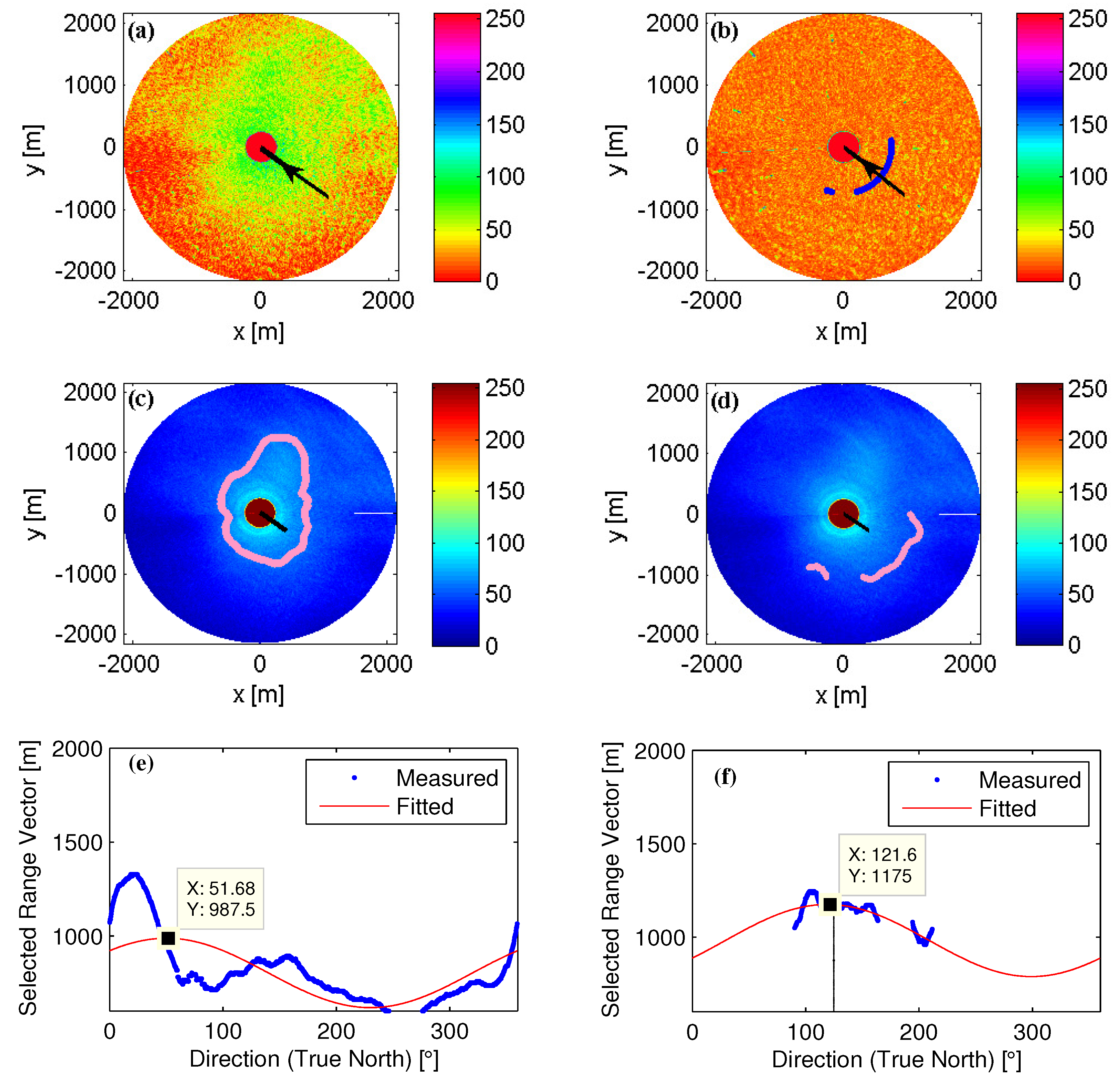
3.2.1. Intensity Level Selection
3.2.2. Wind Direction and Speed Retrieval
3.2.3. Modifications
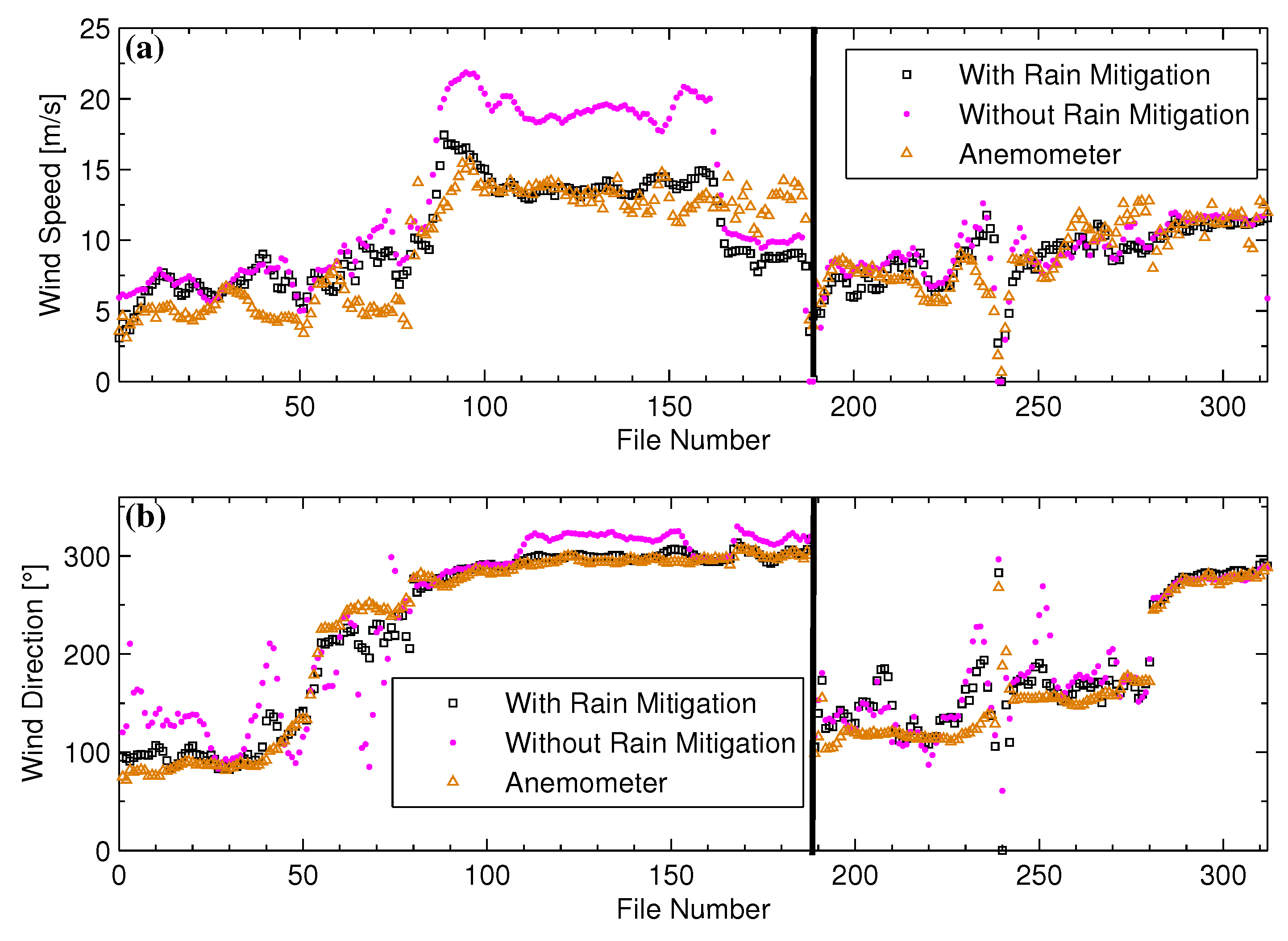
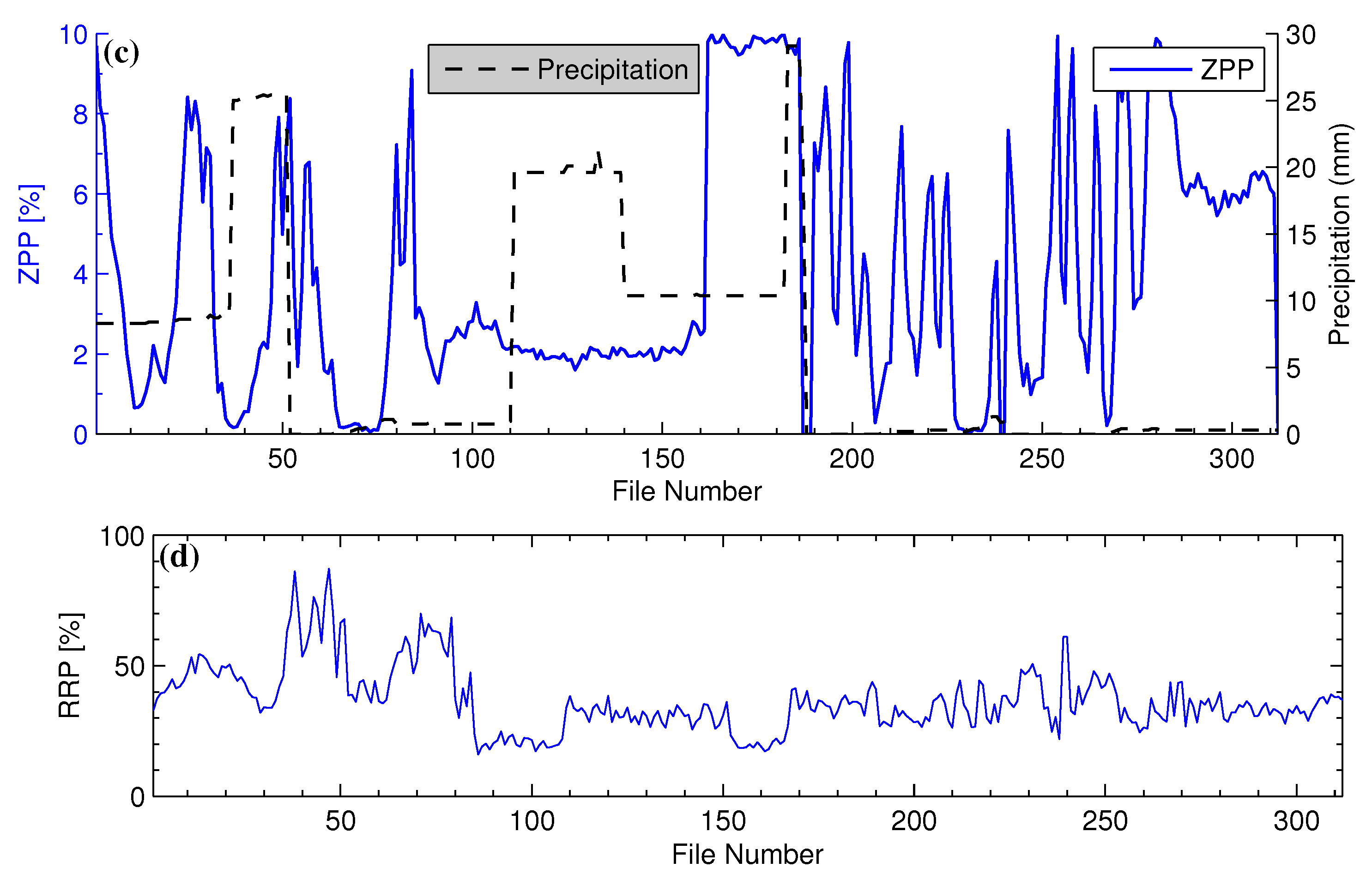
4. Results
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Moat, B.I.; Yelland, M.J.; Pascal, R.W.; Molland, A.F. The effect of ship shape and anemometer location on wind speed measurements obtained from ships. In Proceedings of the 4th International Conference on Marine Computational Fluid Dynamics, Southampton, UK, 30–31 March 2005.
- Liu, Y.; Huang, W.; Gill, E.W.; Peters, D.K.; Bueno, R.V. Comparison of algorithms for wind parameters extraction from shipborne X-band marine radar images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 896–906. [Google Scholar] [CrossRef]
- Tournadre, J.; Quilfen, Y. Impact of rain cell on scatterometer data: 1. Theory and modeling. J. Geophys. Res. 2003, 108. [Google Scholar] [CrossRef]
- Contreras, R.F.; Plant, W.J. Surface effect of rain on microwave backscatter from the ocean: Measurements and modeling. J. Geophys. Res. Oceans 2006, 111. [Google Scholar] [CrossRef]
- Melsheimer, C.; Alpers, W.; Gade, M. Investigation of multifrequency/multipolarization radar signatures of rain cells over the ocean using SIR-C/X-SAR data. J. Geophys. Res. 1998, 103, 18867–18884. [Google Scholar] [CrossRef]
- Lund, B.; Graber, H.C.; Romeiser, R. Wind retrieval from shipborne nautical X-band radar data. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3800–3811. [Google Scholar] [CrossRef]
- Braun, N.; Gade, M.; Lange, P.A. Radar backscattering measurements of artificial rain impinging on a water surface at different wind speeds. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 28 June–2 July 1999.
- Liu, Y.; Huang, W.; Gill, E.W. Analysis of the effects of rain on surface wind retrieval from X-band marine radar images. In Proceedings of the MTS/IEEE Oceans, St. John’s, NL, Canada, 14–19 September 2014.
- Jang, M.K.; Choand, C.S. Target detection of marine radars using matrix bank filters. In Proceedings of the Asia Pacific Microwave Conference, Kaohsiung, Taiwan, 4–7 December 2012.
- Lee, P.H.Y.; Barter, J.D.; Beach, K.L.; Hindman, C.L.; Lake, B.M.; Rungaldier, H.; Shelton, J.C.; Williams, A.B.; Yee, R.; Yuen, H.C. X-band microwave backscattering from ocean waves. J. Geophys. Res. 1995, 100, 2591–2611. [Google Scholar] [CrossRef]
- Hatten, H.; Ziemer, F.; Seemann, J.; Borge, J.N. Correlation between the spectral background noise of a nautical radar and the wind vector. In Proceedings of the 17th International Conference on Offshore Mechanics and Arctic Engineering, Lisbon, Portugal, 5–6 July 1998.
- Trizna, D.; Carlson, D. Studies of dual polarized low grazing angle radar sea scatter in nearshore regions. IEEE Trans. Geosci. Remote Sens. 1996, 34, 747–757. [Google Scholar] [CrossRef]
- Dankert, H.; Horstmann, J.; Rosenthal, W. Ocean wind fields retrieved from radar-image sequences. J. Geophys. Res. Oceans 2003, 108. [Google Scholar] [CrossRef]
- Dankert, H.; Horstmann, J. A marine radar wind sensor. J. Atmos. Ocean. Technol. 2007, 24, 1629–1642. [Google Scholar] [CrossRef]
- Vicen-Bueno, R.; Horstmann, J.; Terril, E.; Paolo, T.D.; Dannenberg, J. Real-time ocean wind vector retrieval from marine radar image sequences acquired at grazing angle. IEEE Trans. Geosci. Remote Sens. 2013, 30, 127–139. [Google Scholar] [CrossRef]
- Gourley, J.J.; Tabary, P.; Chatelet, J.P.D. A fuzzy logic algorithm for the separation of precipitating from nonprecipitating echoes using polarimetric radar observations. J. Atmos. Ocean. Technol. 2007, 24, 1439–1451. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, W.; Gill, E.W. Intensity-level-selection-based wind retrieval from shipborne nautical X-band radar data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Quebéc, QC, Canada, 13–18 July 2014.
- WaMoS II Wave and Surface Current Monitoring System Operating Manual Version 4.0. Available online: https://www.scribd.com/document/237204782/OceanWaves-WaMoS-II-Operating-Manual (accessed on 14 February 2017).
- Huang, W.; Gill, E.W.; An, J. Iterative least-squares-based wave measurement using X-band nautical radar. IET Radar Sonar Navig. 2014, 8, 853–863. [Google Scholar] [CrossRef]
- Huang, W.; Carrasco, R.; Shen, C.; Gill, E.W.; Horstmann, J. Surface current measurements using X-band marine radar with vertical polarization. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2988–2997. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Collecting Time | Number of Radar Images | Number of Rain Cases | Number of Low-Backscatter Images |
|---|---|---|---|
| 26 November 23:45–28 November 04:04 and 28 November 11:16–29 November 12:06 | 49,182 | 9924 | 1832 |
| Wind Algorithm | Wind Direction Error | Wind Speed Error | ||
|---|---|---|---|---|
| Bias (°) | STD (°) | Bias (m/s) | STD (m/s) | |
| Rain-Contaminated (With Rain Mitigation) | 5.3 | 19.9 | 0.3 | 2.0 |
| Rain-Contaminated (Without Rain Mitigation) | 14.7 | 34.4 | 2.1 | 3.3 |
| Rain-Free | 1.7 | 15.9 | 0.6 | 1.4 |
| All (With Rain Mitigation) | 2.5 | 16.8 | 0.5 | 1.5 |
| All (Without Rain Mitigation) | 4.4 | 21.2 | 0.9 | 1.9 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, W.; Liu, Y.; Gill, E.W. Texture-Analysis-Incorporated Wind Parameters Extraction from Rain-Contaminated X-Band Nautical Radar Images. Remote Sens. 2017, 9, 166. https://doi.org/10.3390/rs9020166
Huang W, Liu Y, Gill EW. Texture-Analysis-Incorporated Wind Parameters Extraction from Rain-Contaminated X-Band Nautical Radar Images. Remote Sensing. 2017; 9(2):166. https://doi.org/10.3390/rs9020166
Chicago/Turabian StyleHuang, Weimin, Ying Liu, and Eric W. Gill. 2017. "Texture-Analysis-Incorporated Wind Parameters Extraction from Rain-Contaminated X-Band Nautical Radar Images" Remote Sensing 9, no. 2: 166. https://doi.org/10.3390/rs9020166
APA StyleHuang, W., Liu, Y., & Gill, E. W. (2017). Texture-Analysis-Incorporated Wind Parameters Extraction from Rain-Contaminated X-Band Nautical Radar Images. Remote Sensing, 9(2), 166. https://doi.org/10.3390/rs9020166