
MHHT-Based Method for Analysis of Micro-Doppler Signatures for Human Finer-Grained Activity Using Through-Wall SFCW Radar

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
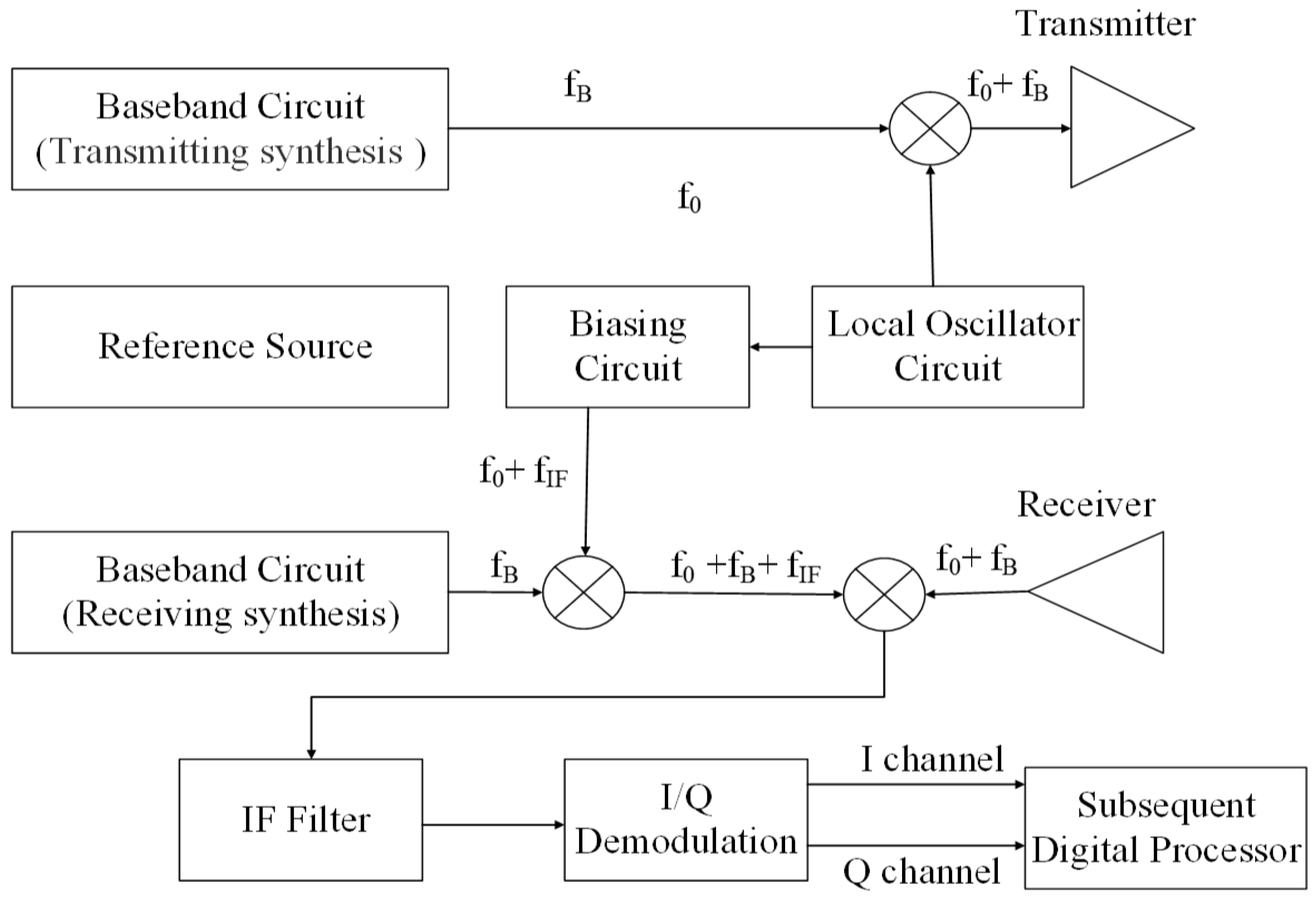
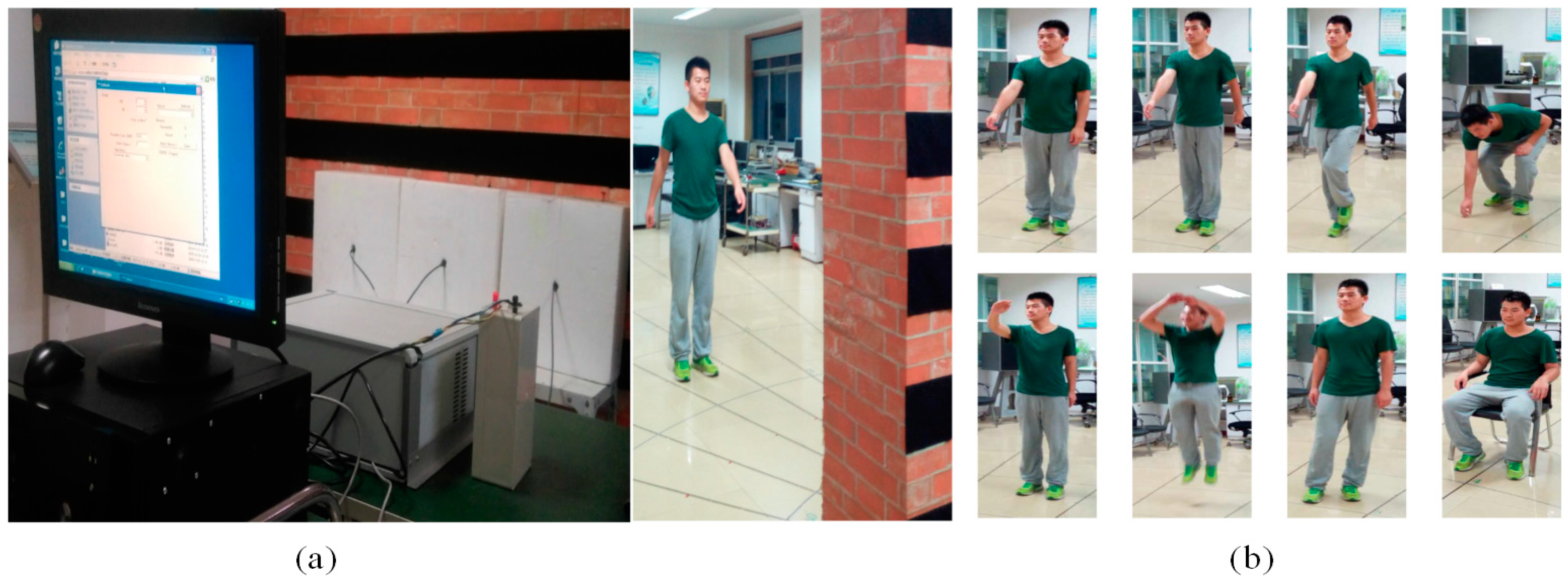
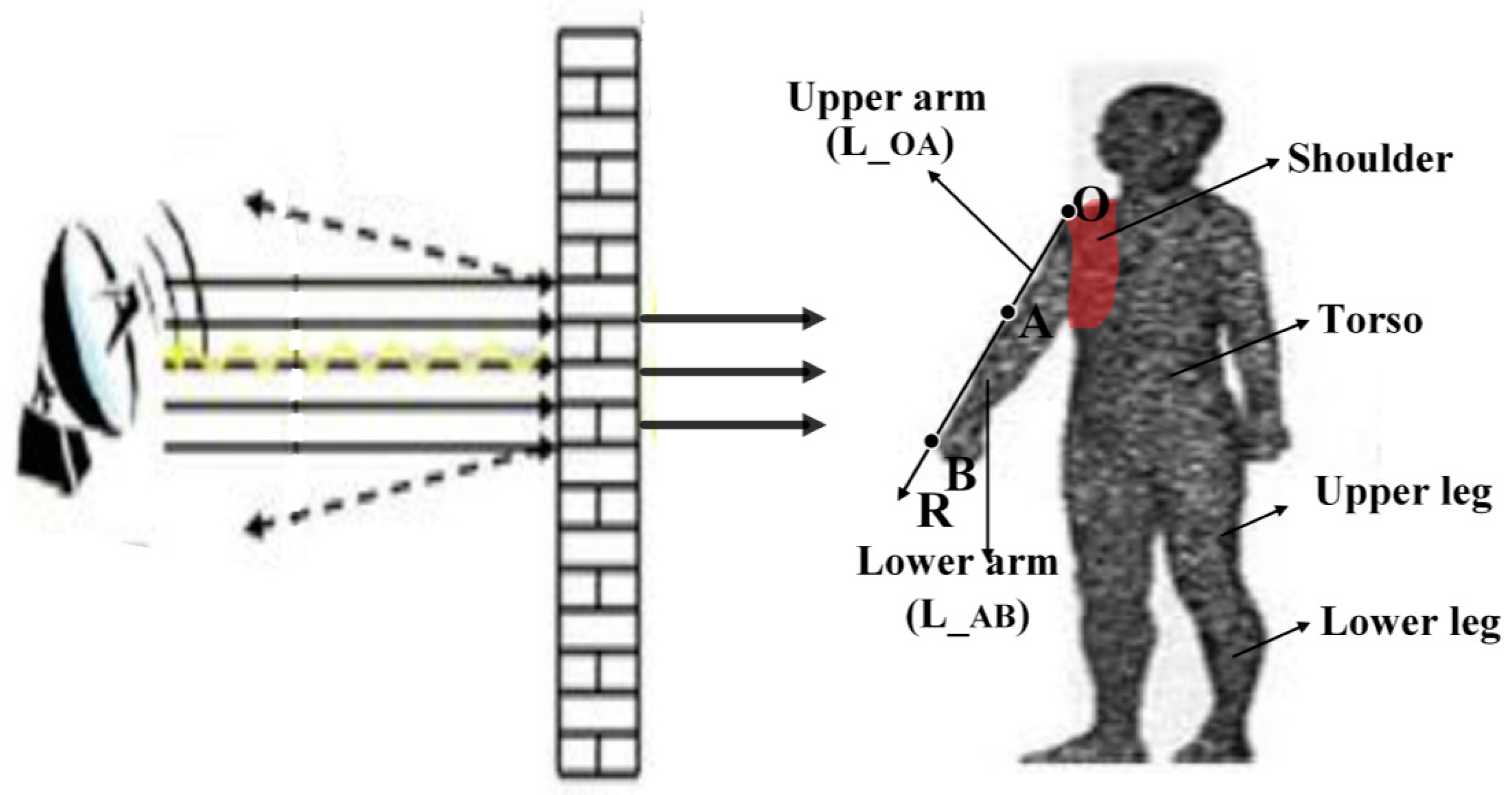
2.1. UWB Radar System and Experimental Setup
2.2. The EEMD-Based MHHT T-F Analysis Algorithm
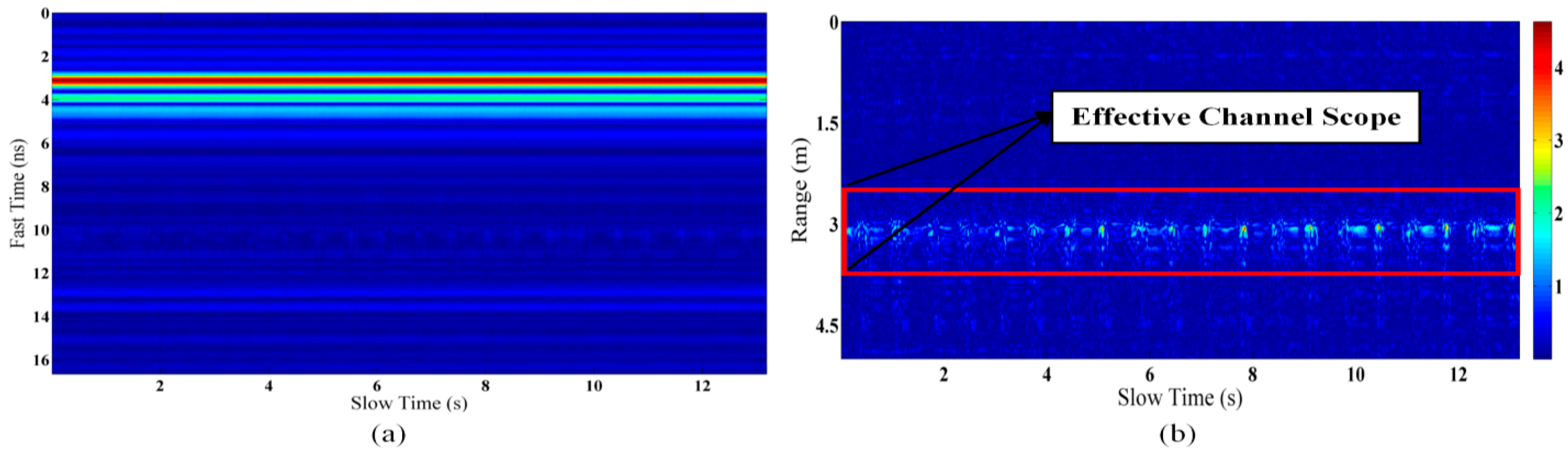
2.2.1. Signal Preprocessing
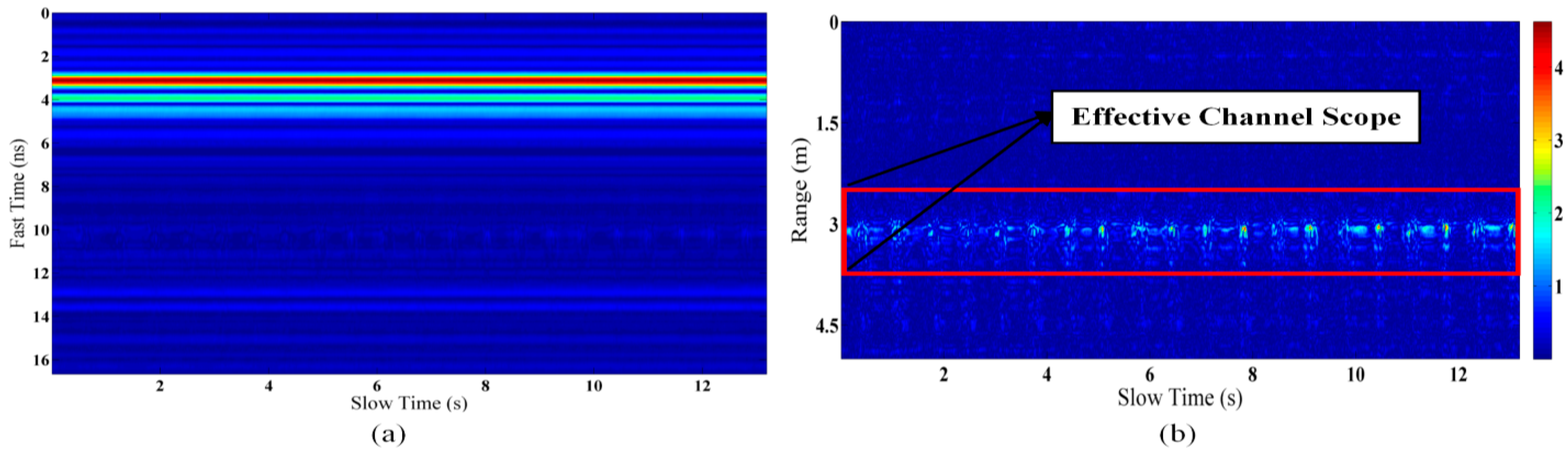
2.2.2. Effective Channel Scope Selection
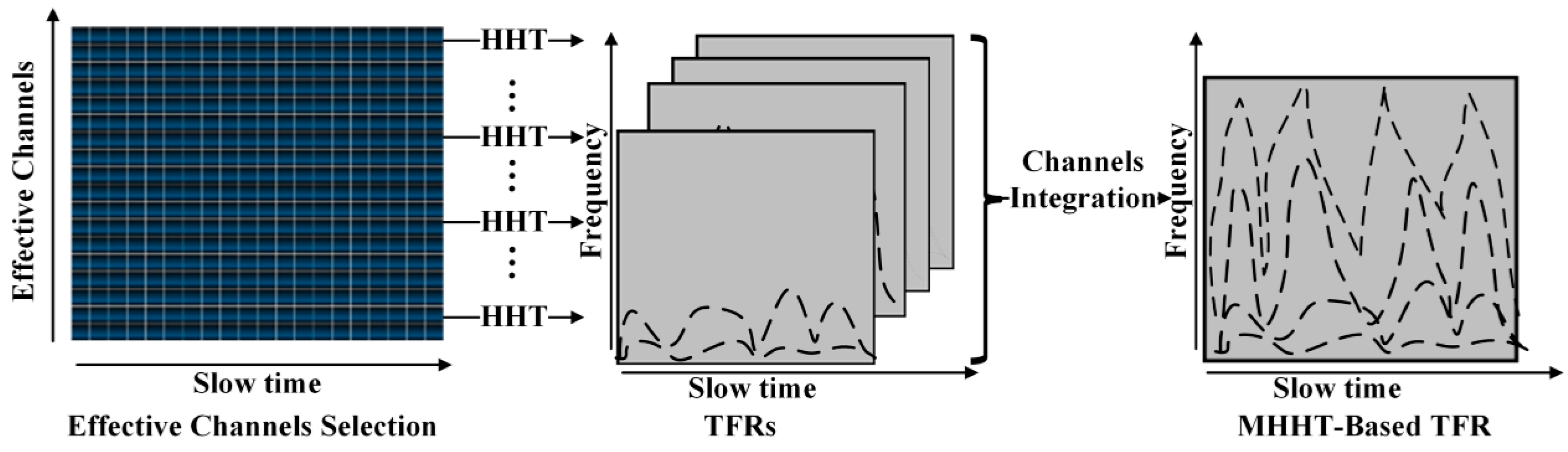
2.2.3. MHHT
- (a)
- Conduct the conventional EMD operation [37] on the added noise signal: Based on the local characteristics of the time series of the signal sequence, EMD decomposes the complex signal into a finite number of intrinsic mode functions.
- (b)
- will be acquired after EMD operation and each component represents a single component signal at a certain frequency, as the following:
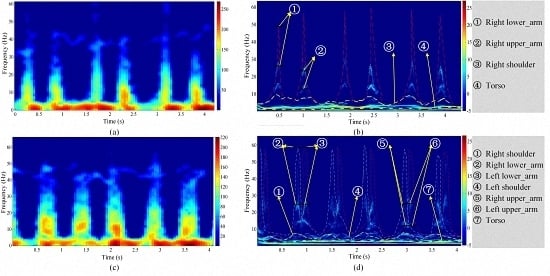
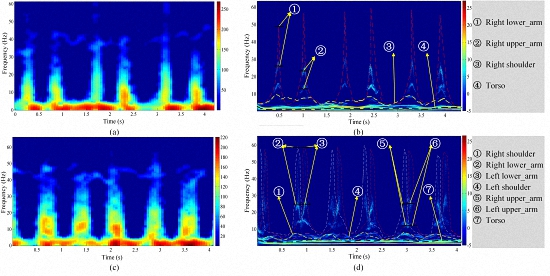
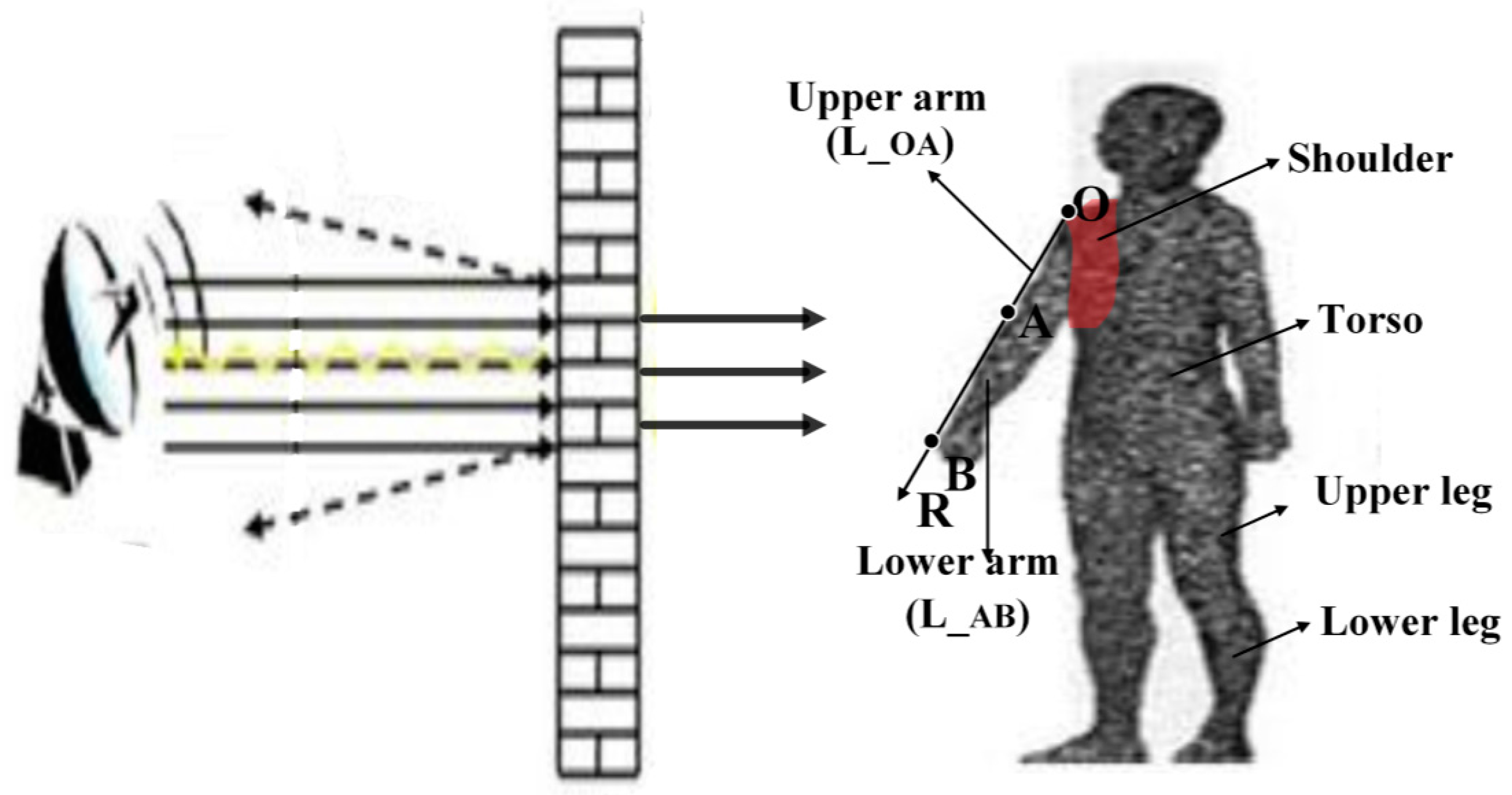
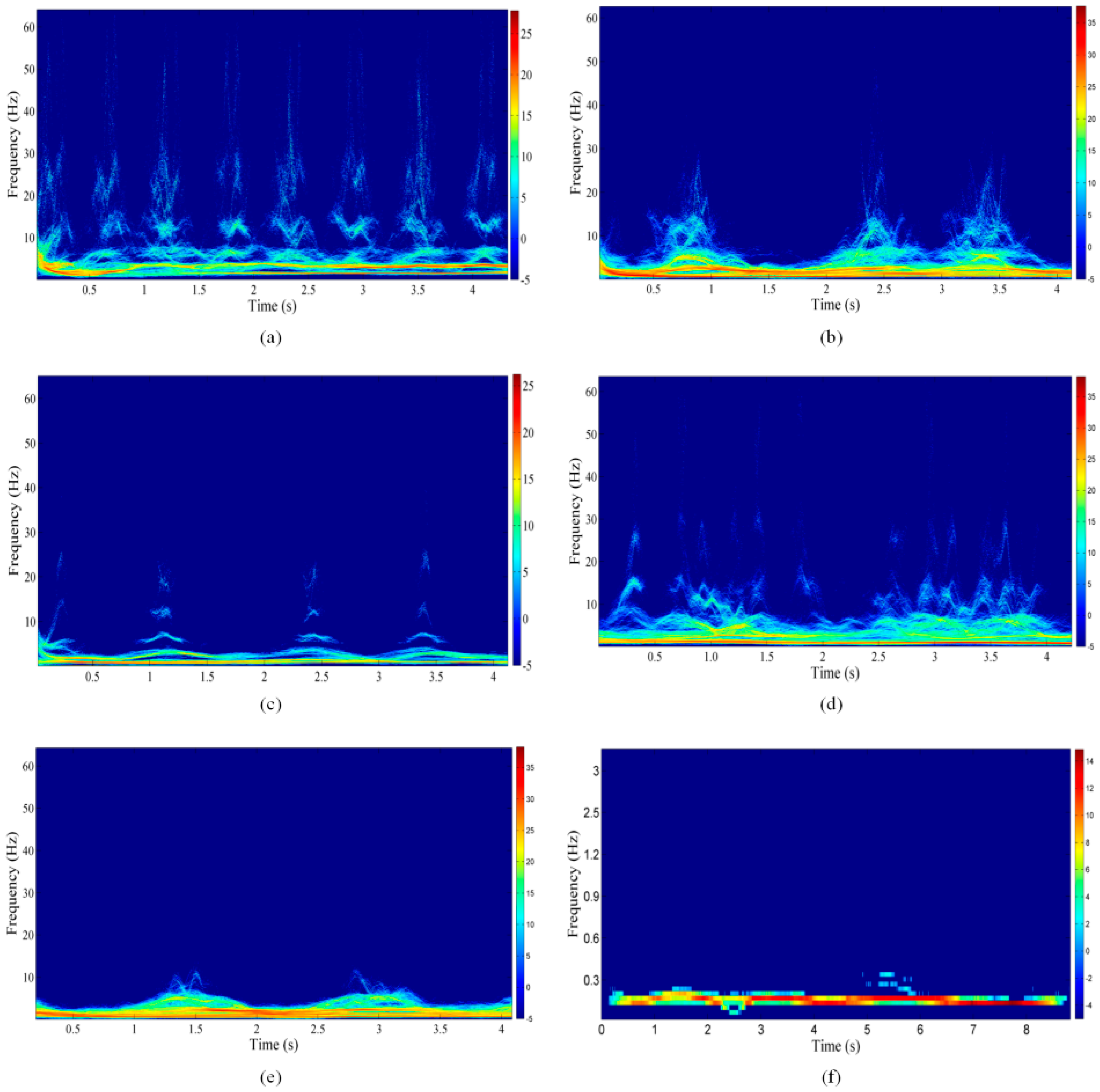
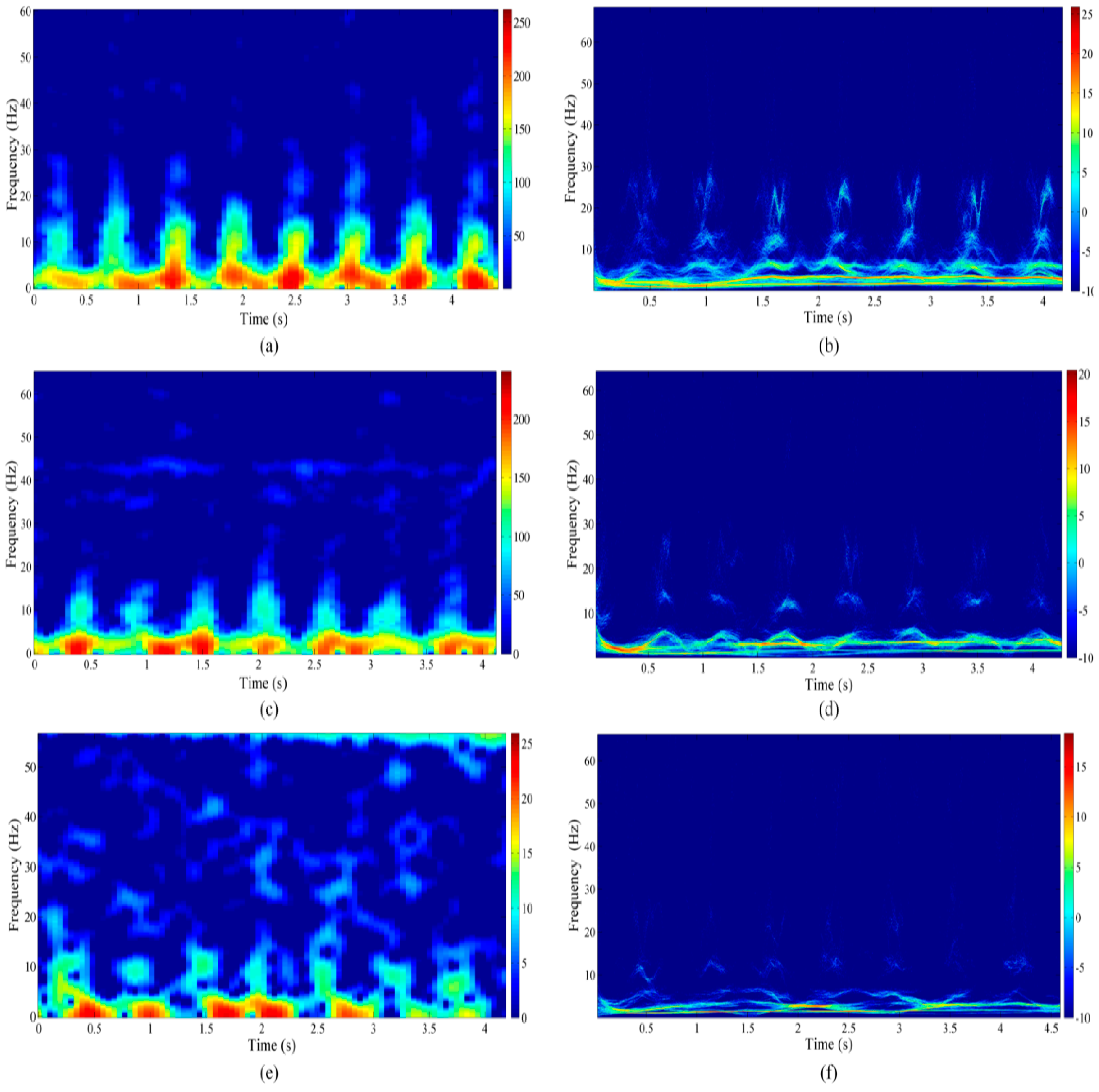
2.3. Micro-Doppler Analysis
3. Experimental Results
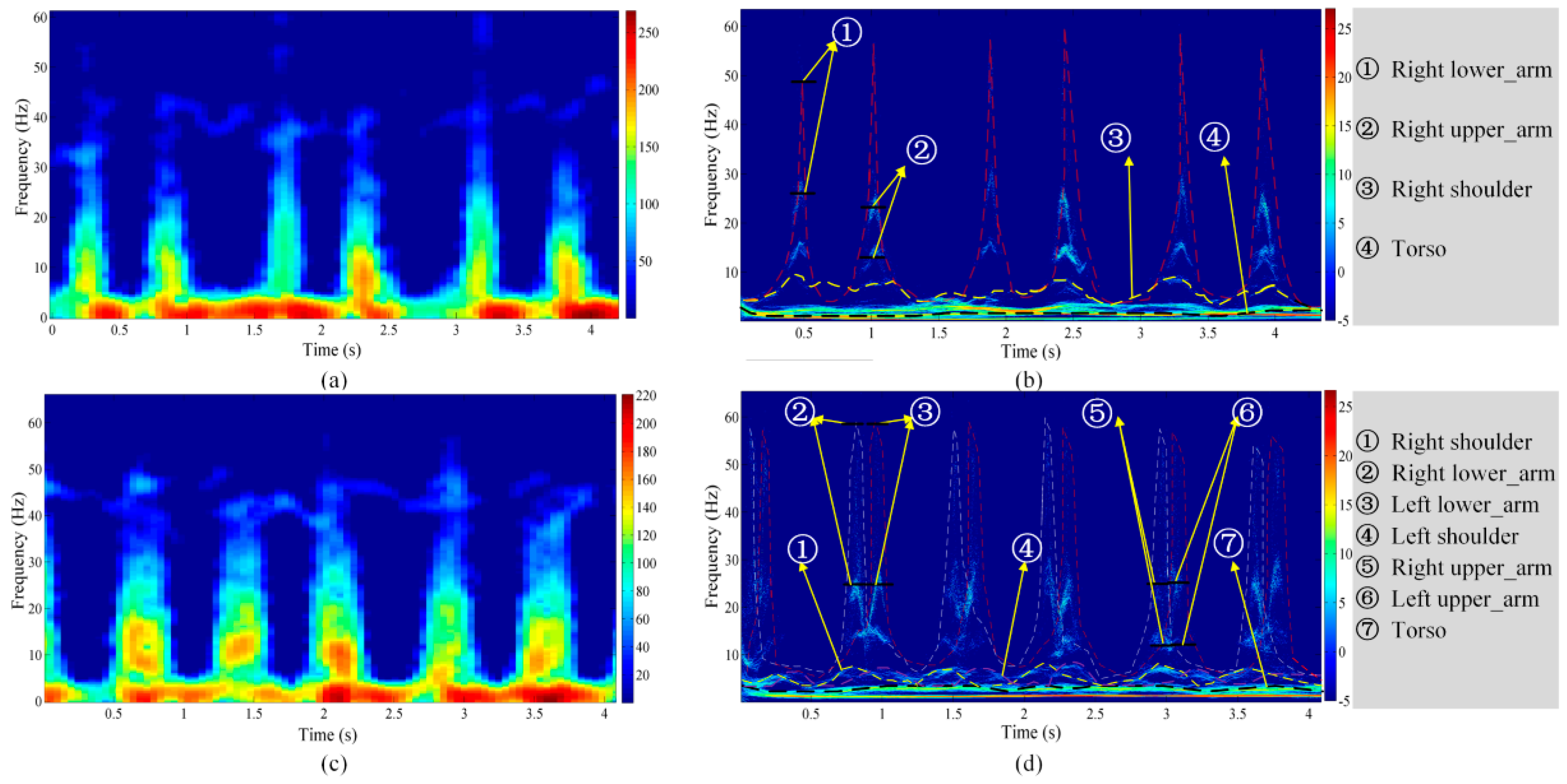
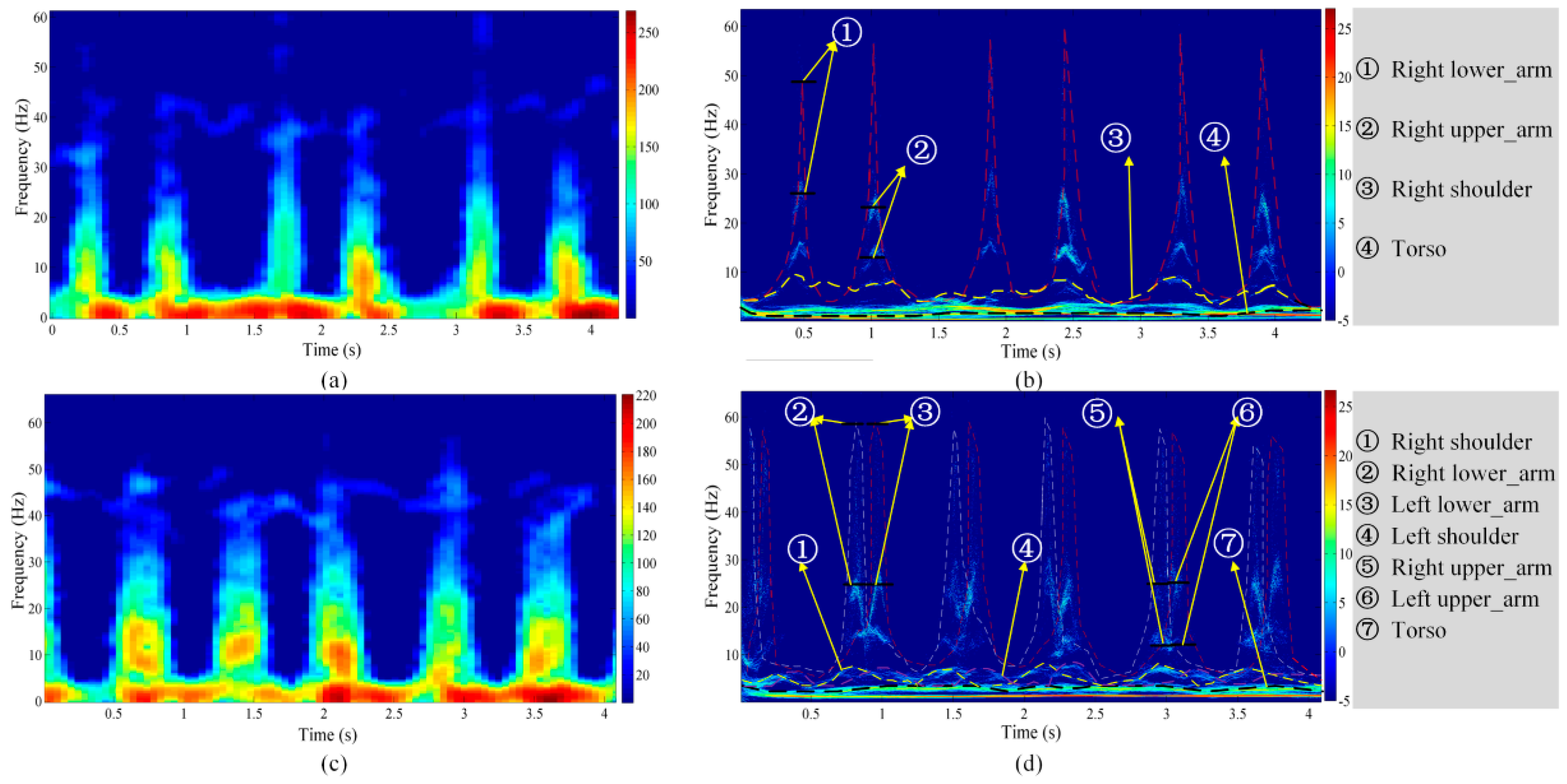
3.1. Micro-Doppler Feature Analysis Based on MHHT and Validation of Structural Characteristics
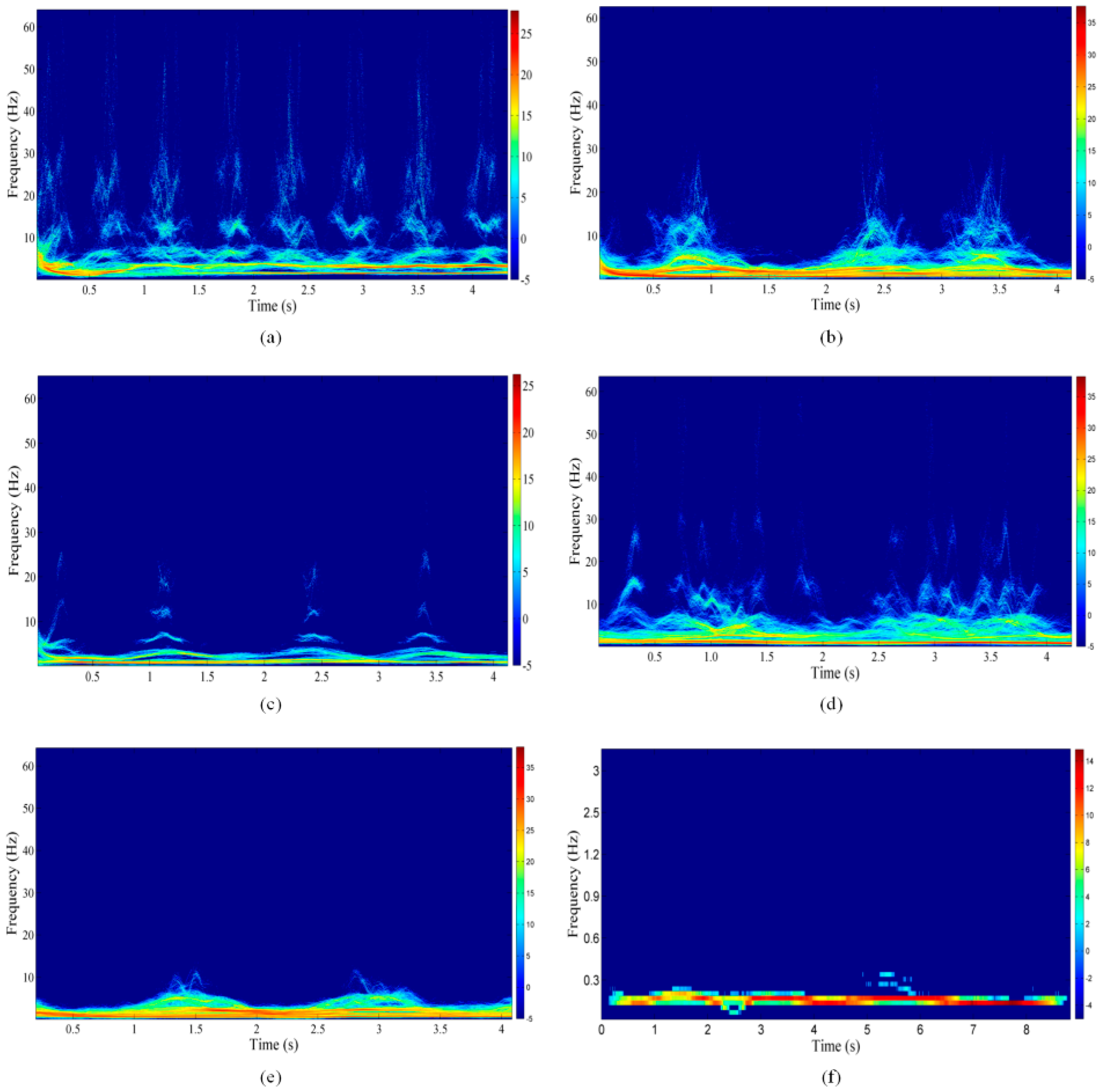
3.2. Adaptability Test
3.3. Anti-Interference Ability Test
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zenaldin, M.; Narayanan, R.M. Features associated with radar micro-Doppler signatures of various human activities. Int. Soc. Opt. Photonics 2015. [Google Scholar] [CrossRef]
- Fioranelli, F.; Ritchie, M.; Griffiths, H. Multistatic human micro-Doppler classification of armed/unarmed personnel. IET Radar Sonar Navig. 2015, 9, 857–865. [Google Scholar] [CrossRef]
- Karabacak, C.; Gurbuz, S.Z.; Gurbuz, A.C.; Guldogan, M.B.; Hendeby, G.; Gustafsson, F. Knowledge Exploitation for Human Micro-Doppler Classification. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2125–2129. [Google Scholar] [CrossRef]
- Clemente, C.; Pallotta, L.; De Maio, A.; Soraghan, J.J.; Farina, A. A novel algorithm for radar classification based on doppler characteristics exploiting orthogonal Pseudo-Zernike polynomials. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 417–430. [Google Scholar] [CrossRef]
- Kim, Y.; Ling, H. Human activity classification based on micro-Doppler signatures using a support vector machine. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1328–1337. [Google Scholar]
- Qi, F.; Li, C.; Wang, S.; Zhang, H.; Wang, J.; Lu, G. Contact-free detection of obstructive sleep apnea based on wavelet information entropy spectrum using bio-radar. Entropy 2016, 18, 306. [Google Scholar] [CrossRef]
- Qi, F.; Liang, F.; Lv, H.; Li, C.; Chen, F.; Wang, J. Detection and classification of finer-grained human activities based on stepped-frequency continuous-wave through-wall radar. Sensors 2016, 16, 885. [Google Scholar] [CrossRef] [PubMed]
- Forouzanfar, M.; Mabrouk, M.; Rajan, S.; Bolic, M.; Dajani, H.R.; Groza, V.Z. Event recognition for contactless activity monitoring using phase-modulated continuous wave radar. IEEE Trans. Bio-Med. Eng. 2016, 64, 479–491. [Google Scholar] [CrossRef] [PubMed]
- Chen, V.C. Analysis of radar micro-Doppler with time-frequency transform. In Proceedings of the Tenth IEEE Workshop on Statistical Signal and Array Processing, Pocono Manor, PA, USA, 14–16 August 2000.
- Chen, V.C.; Li, F.; Ho, S.; Wechsler, H. Analysis of micro-Doppler signatures. IEE Proc.-Radar Sonar Navig. 2003, 150, 271–276. [Google Scholar] [CrossRef]
- Chen, V.C.; Li, F.; Ho, S.; Wechsler, H. Micro-Doppler effect in radar: phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Van Dorp, P.; Groen, F. Feature-based human motion parameter estimation with radar. IET Radar Sonar Navig. 2008, 2, 135–145. [Google Scholar] [CrossRef]
- Fairchild, D.P.; Narayanan, R.M. Micro-doppler radar classification of human motions under various training scenarios. Int. Soc. Opt. Photonics 2013. [Google Scholar] [CrossRef]
- Narayanan, R.M.; Smith, S.; Gallagher, K.A. A multifrequency radar system for detecting humans and characterizing human activities for short-range through-wall and long-range foliage penetration applications. Int. J. Microw. Sci. Technol. 2014, 2014, 958905. [Google Scholar] [CrossRef]
- Yarovoy, A.G.; Ligthart, L.P.; Matuzas, J.; Levitas, B. UWB radar for human being detection. IEEE Aerosp. Electron. Syst. Mag. 2006, 21, 10–14. [Google Scholar] [CrossRef]
- Singh, S.; Liang, Q.; Chen, D.; Sheng, L. Sense through wall human detection using UWB radar. EURASIP J. Wirel. Commun. Netw. 2011. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, Q.; Qiu, C.; Liang, X.; Li, K. Micro-Doppler effect analysis and feature extraction in ISAR imaging with stepped-frequency chirp signals. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2087–2098. [Google Scholar]
- Kim, Y.; Ling, H. Human activity classification based on micro-Doppler signatures using an artificial neural network. In Proceedings of the 2008 AP-S Antennas and Propagation Society International Symposium, San Diego, CA, USA, 5–12 July 2008.
- Kim, Y.; Ha, S.; Kwon, J. Human detection using Doppler radar based on physical characteristics of targets. IEEE Geosci. Remote Sens. Lett. 2015, 12, 289–293. [Google Scholar]
- Fioranelli, F.; Ritchie, M.; Griffiths, H. Classification of unarmed/armed personnel using the NetRAD multistatic radar for micro-Doppler and singular value decomposition features. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1933–1937. [Google Scholar] [CrossRef]
- Tivive, F.H.C.; Phung, S.L.; Bouzerdoum, A. Classification of micro-Doppler signatures of human motions using log-Gabor filters. IET Radar Sonar Navig. 2015, 9, 1188–1195. [Google Scholar] [CrossRef]
- Orović, I.; Stanković, S.; Amin, M. A new approach for classification of human gait based on time-frequency feature representations. Signal Process. 2011, 91, 1448–1456. [Google Scholar] [CrossRef]
- Narayanan, R.M.; Shastry, M.C.; Chen, P.; Levi, M. Through-the-wall detection of stationary human targets using Doppler radar. Prog. Electromagn. Res. B 2010, 20, 147–166. [Google Scholar] [CrossRef]
- Chen, V.C. Doppler signatures of radar backscattering from objects with micro-motions. IET Signal Process. 2008, 2, 291–300. [Google Scholar] [CrossRef]
- Mojsilovic, A.; Popovic, M.V.; Rackov, D.M. On the selection of an optimal wavelet basis for texture characterization. IEEE Trans. Image Process. 2000, 9, 2043–2050. [Google Scholar] [PubMed]
- Cohen, L. Time-Frequency Analysis; Prentice Hall PTR: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- Huang, N.E. Hilbert-Huang Transform and Its Applications; World Scientific: Singapore, 2014. [Google Scholar]
- Ram, S.S.; Li, Y.; Lin, A.; Ling, H. Doppler-based detection and tracking of humans in indoor environments. J. Frankl. Inst. 2008, 345, 679–699. [Google Scholar] [CrossRef]
- Lai, C.; Ruan, Q.; Narayanan, R.M. Hilbert-Huang transform (HHT) analysis of human activities using through-wall noise radar. In Proceedings of the 2007 International Symposium on Signals, Systems and Electronics, Montreal, QC, Canada, 30 July–2 August 2007.
- Fairchild, D.P.; Narayanan, R.M. Classification and modeling of human activities using empirical mode decomposition with S-band and millimeter-wave micro-Doppler radars. Int. Soc. Opt. Photonics 2012. [Google Scholar] [CrossRef]
- Lai, C.; Ruan, Q.; Narayanan, R.M. Hilbert-Huang transform (HHT) processing of through-wall noise radar data for human activity characterization. In Proceedings of the 2007 IEEE Workshop on Signal Processing Applications for Public Security and Forensics, Washington, DC, USA, 11–13 April 2007.
- Wang, H.; Narayanan, R.M.; Zhou, Z.; Li, T.J.; Kong, L.J. Micro-Doppler character analysis of moving objects using through-wall radar based on improved EEMD. J. Electron. Inf. Technol. 2010, 32, 1355–1360. [Google Scholar]
- Wang, H.; Zhou, Z.; Li, T.; Kong, L. Human activity classification based on EEMD using a support vector machine. J. Univ. Electron. Sci. Technol. China 2011, 40, 346–351. (In Chinese) [Google Scholar]
- Qi, F.; Li, Z.; Liang, F.; Lv, H.; An, Q.; Wang, J. A novel time-frequency analysis method based on HHT for finer-grained human activity using SFCW radar. Prog. Electromagn. Res. Symp. 2016. [Google Scholar] [CrossRef]
- Fang, G.; Sato, M. Stepped-frequency ground penetrating radar and its application for landmine detection. Dianzi Xuebao (Acta Electron. Sini.) 2005, 33, 436–439. (In Chinese) [Google Scholar]
- Smith, G.E.; Ahmad, F.; Amin, M.G. Micro-Doppler processing for ultra-wideband radar data. Int. Soc. Opt. Photonics 2012. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A 1998, 454, 903–995. [Google Scholar] [CrossRef]




© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, F.; Lv, H.; Liang, F.; Li, Z.; Yu, X.; Wang, J. MHHT-Based Method for Analysis of Micro-Doppler Signatures for Human Finer-Grained Activity Using Through-Wall SFCW Radar. Remote Sens. 2017, 9, 260. https://doi.org/10.3390/rs9030260
Qi F, Lv H, Liang F, Li Z, Yu X, Wang J. MHHT-Based Method for Analysis of Micro-Doppler Signatures for Human Finer-Grained Activity Using Through-Wall SFCW Radar. Remote Sensing. 2017; 9(3):260. https://doi.org/10.3390/rs9030260
Chicago/Turabian StyleQi, Fugui, Hao Lv, Fulai Liang, Zhao Li, Xiao Yu, and Jianqi Wang. 2017. "MHHT-Based Method for Analysis of Micro-Doppler Signatures for Human Finer-Grained Activity Using Through-Wall SFCW Radar" Remote Sensing 9, no. 3: 260. https://doi.org/10.3390/rs9030260