
Fast Detection of Oil Spills and Ships Using SAR Images

Abstract
:
1. Introduction
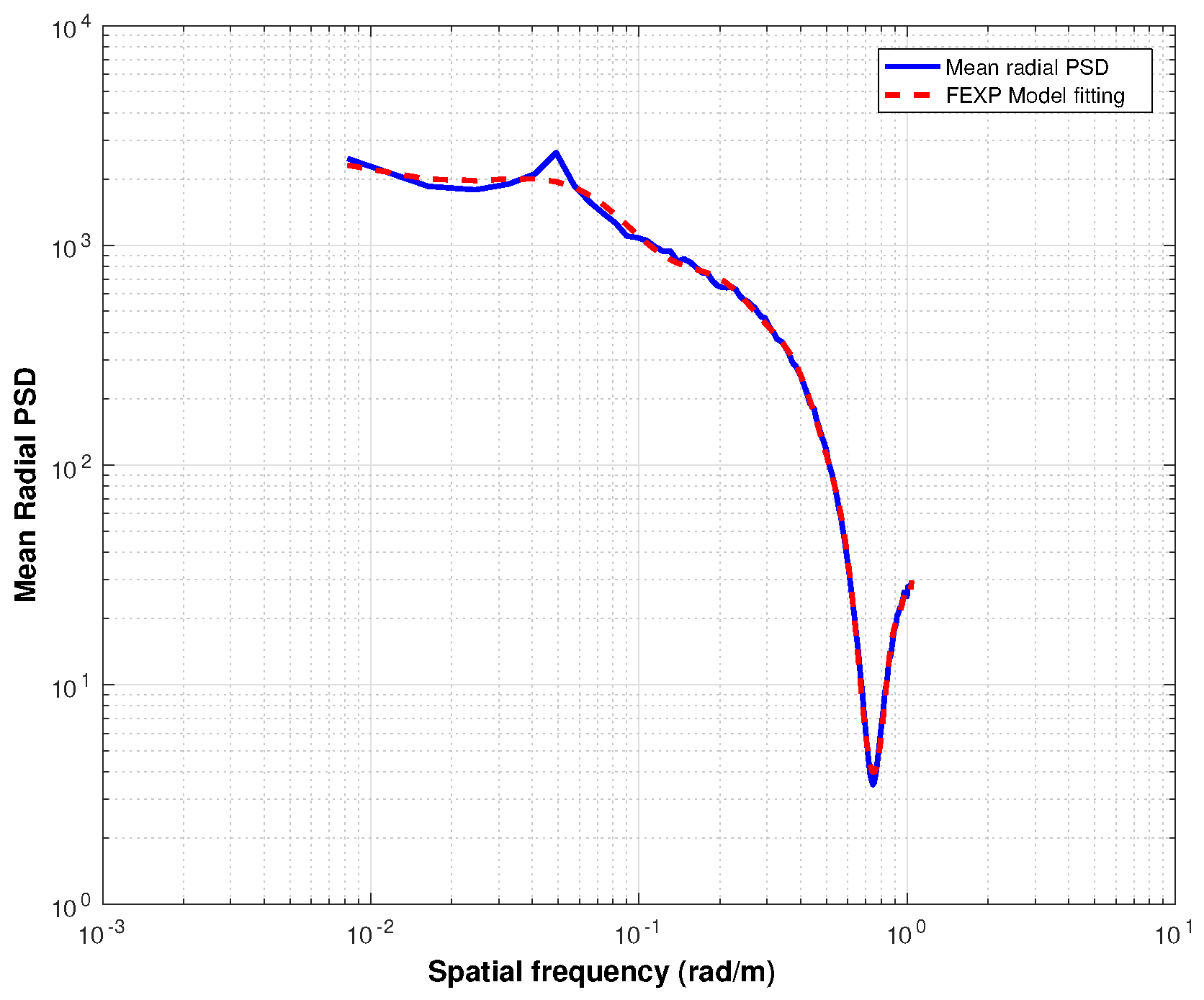
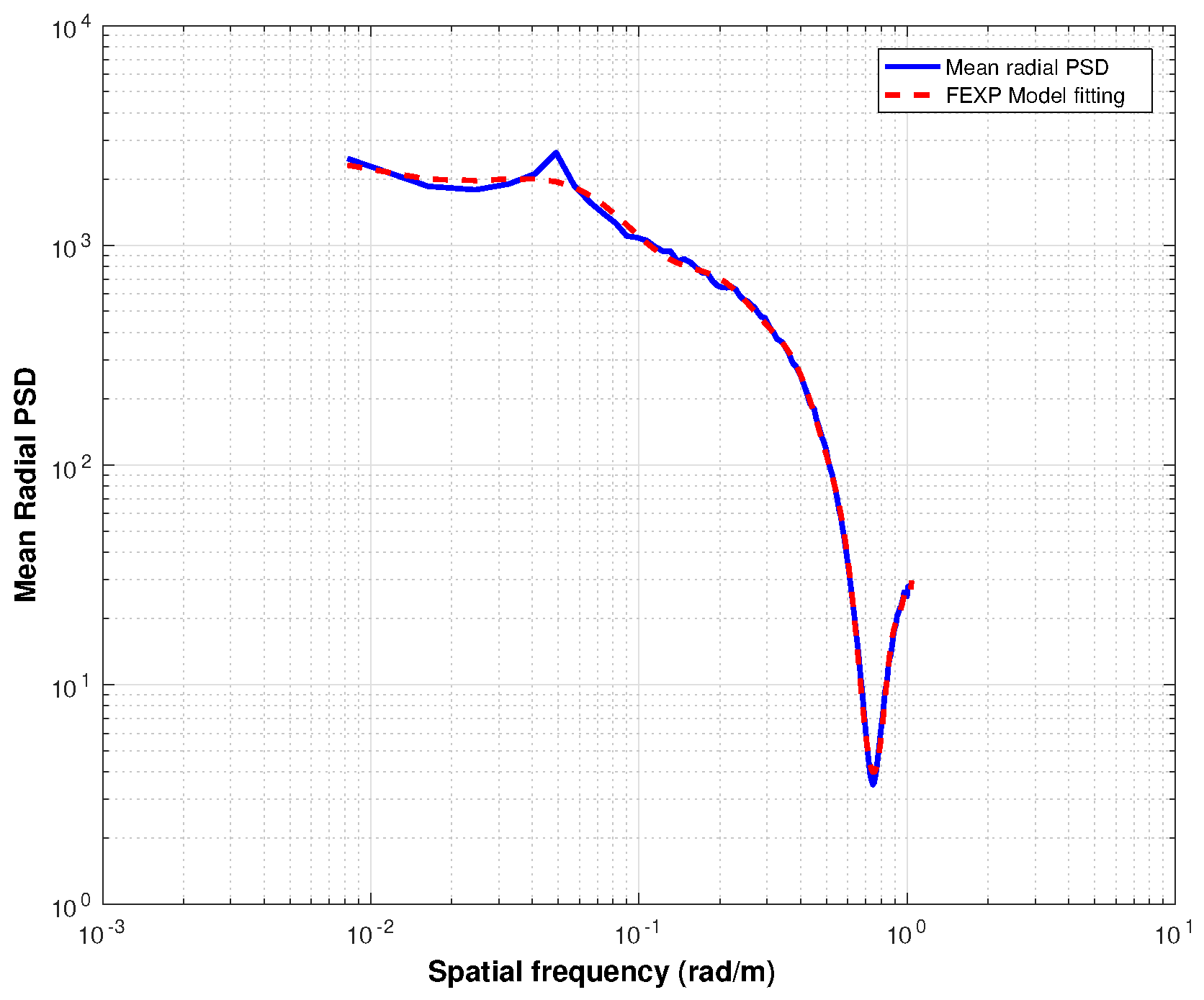
2. Sea Surface Model
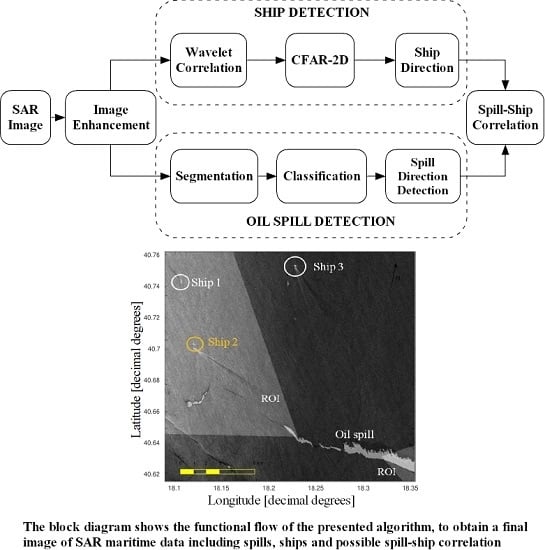
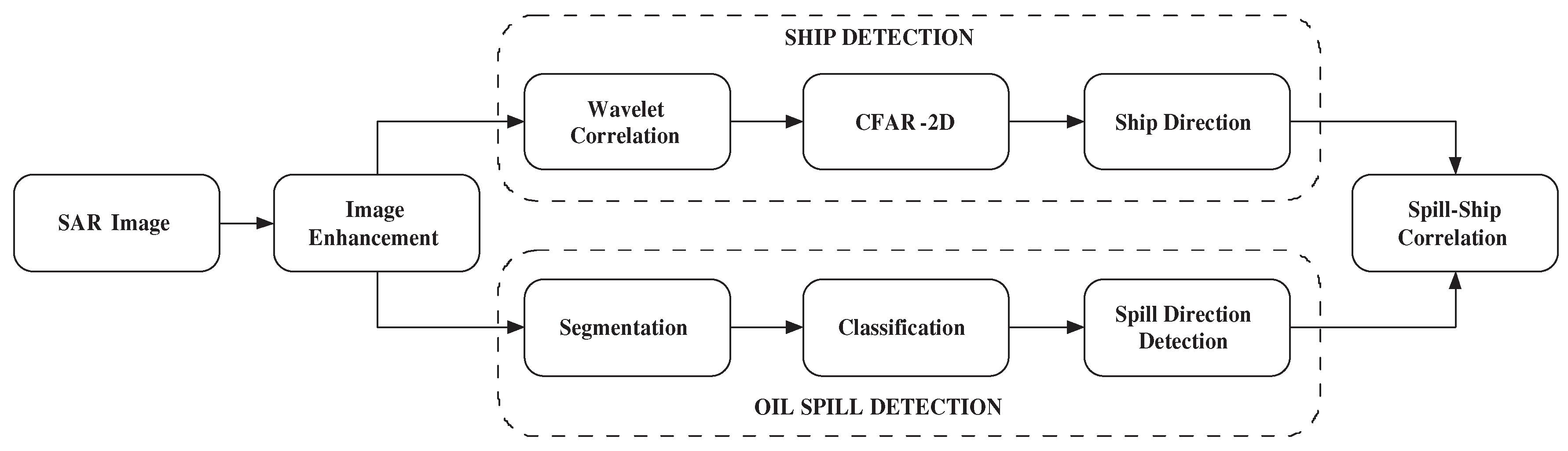
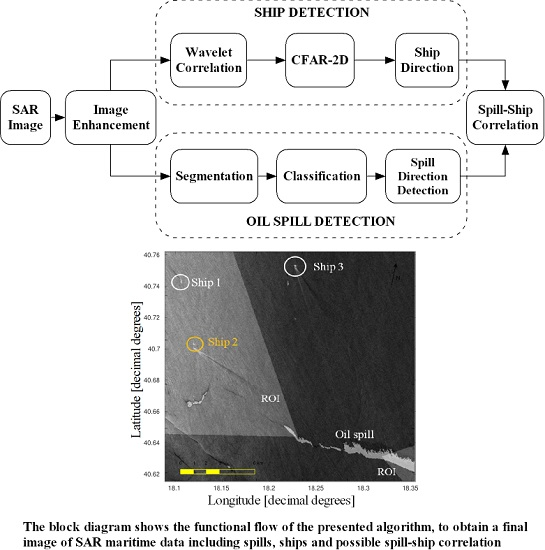
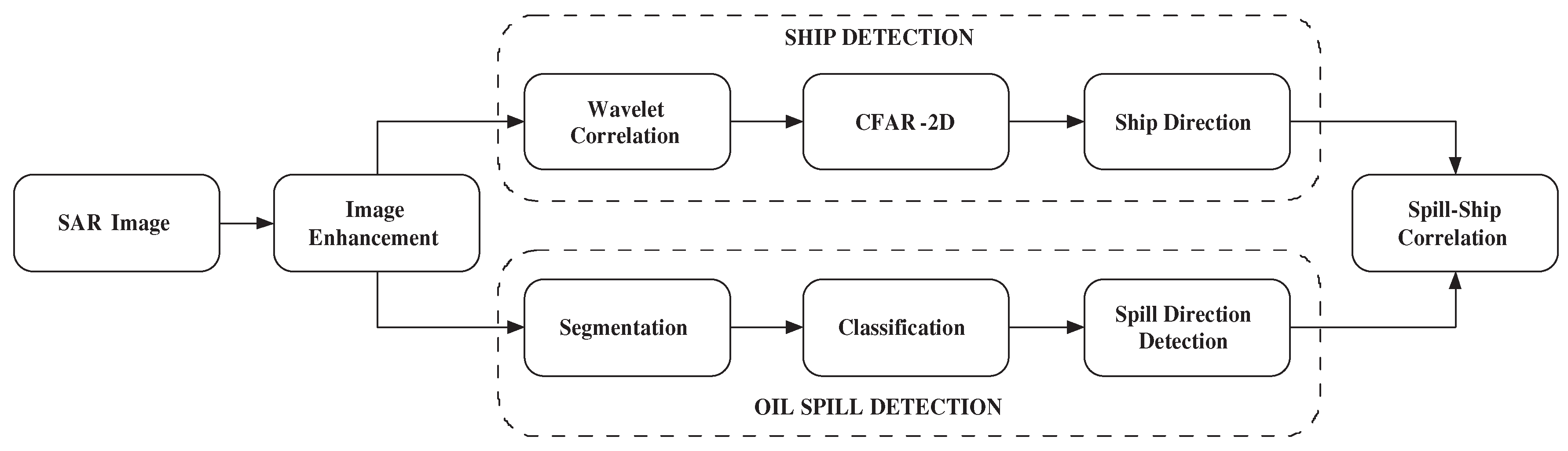
3. Oil Spill and Ship Detection Algorithms
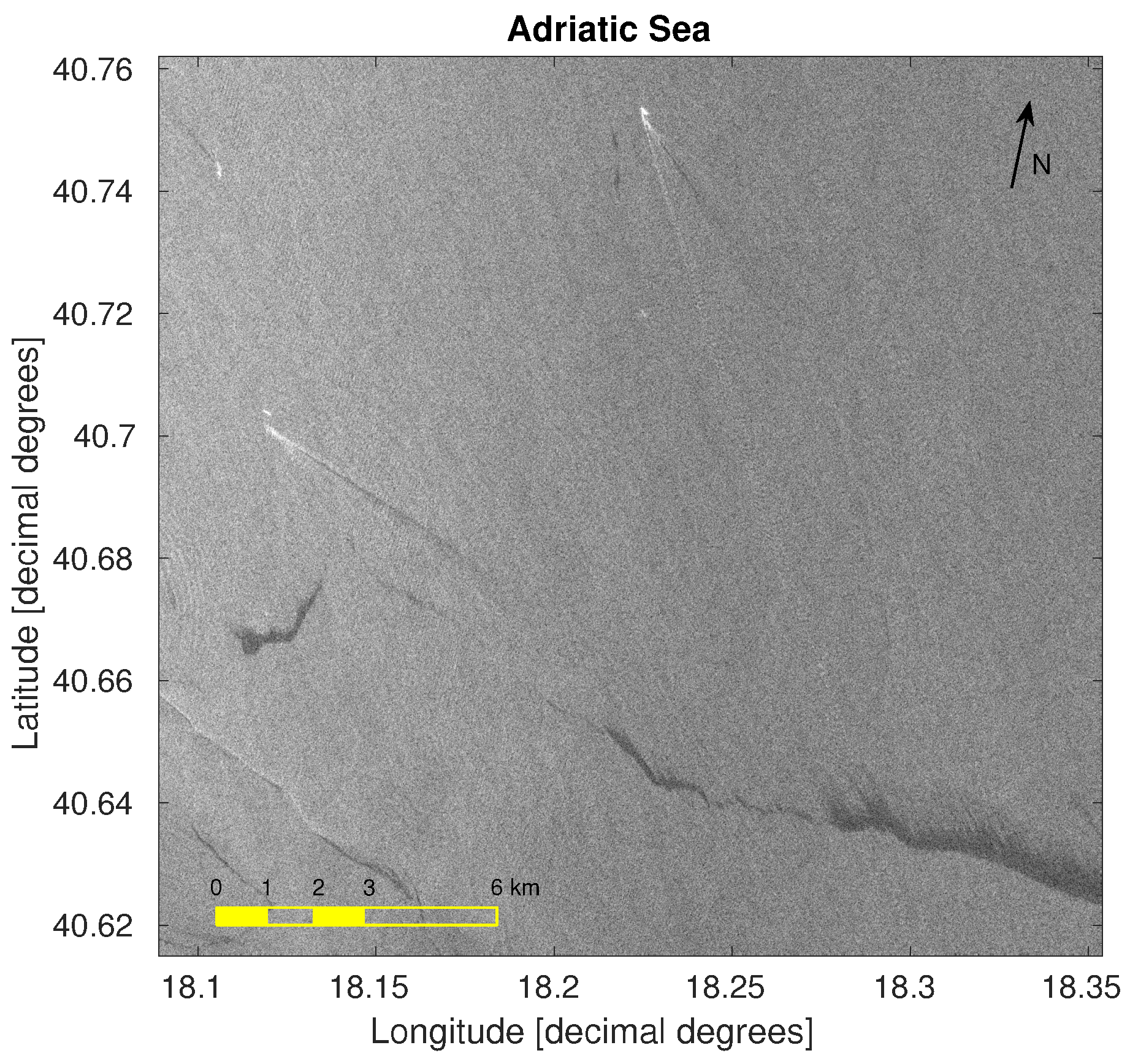
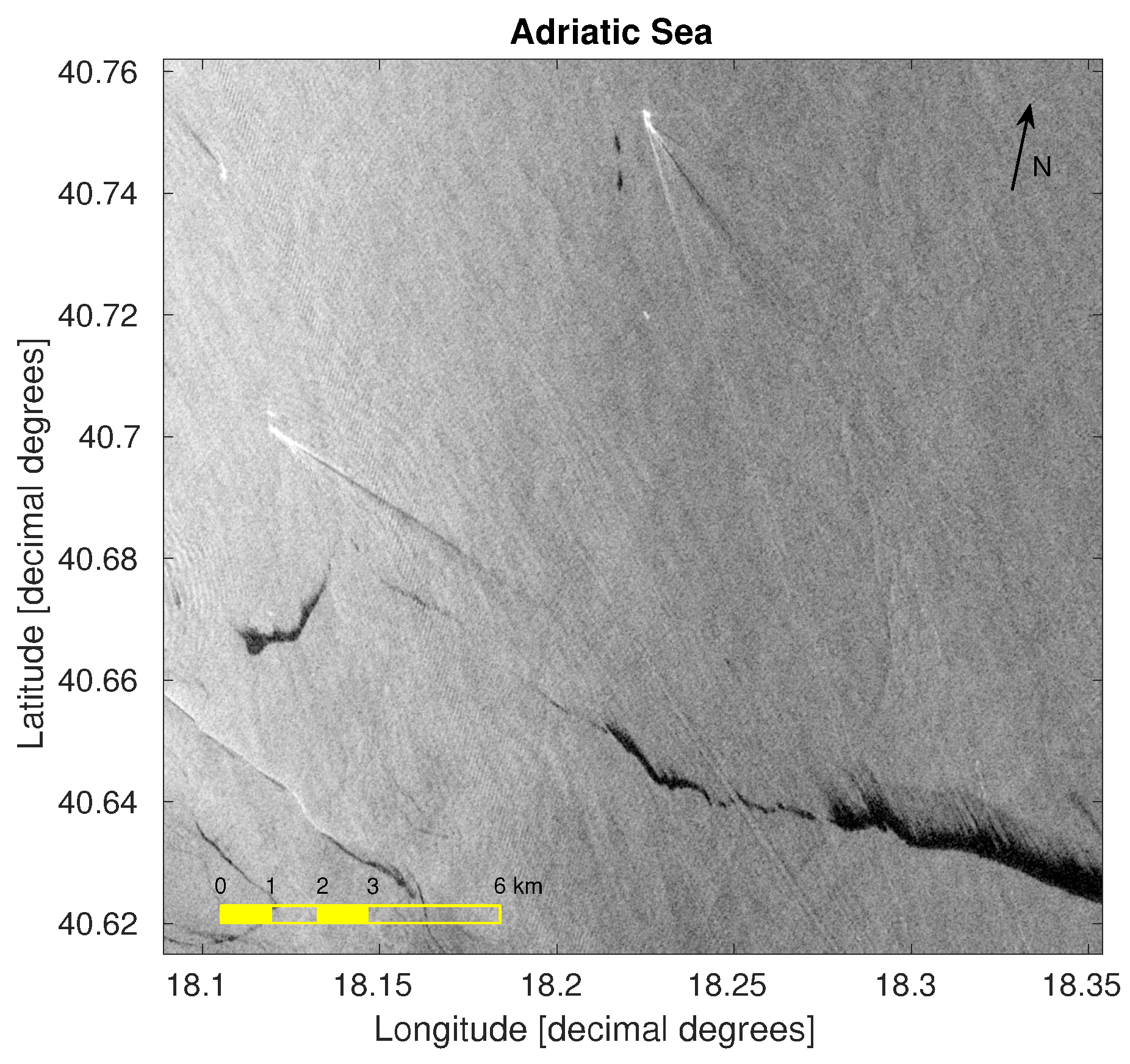
3.1. Image Enhancement
3.2. Oil Spill Detection
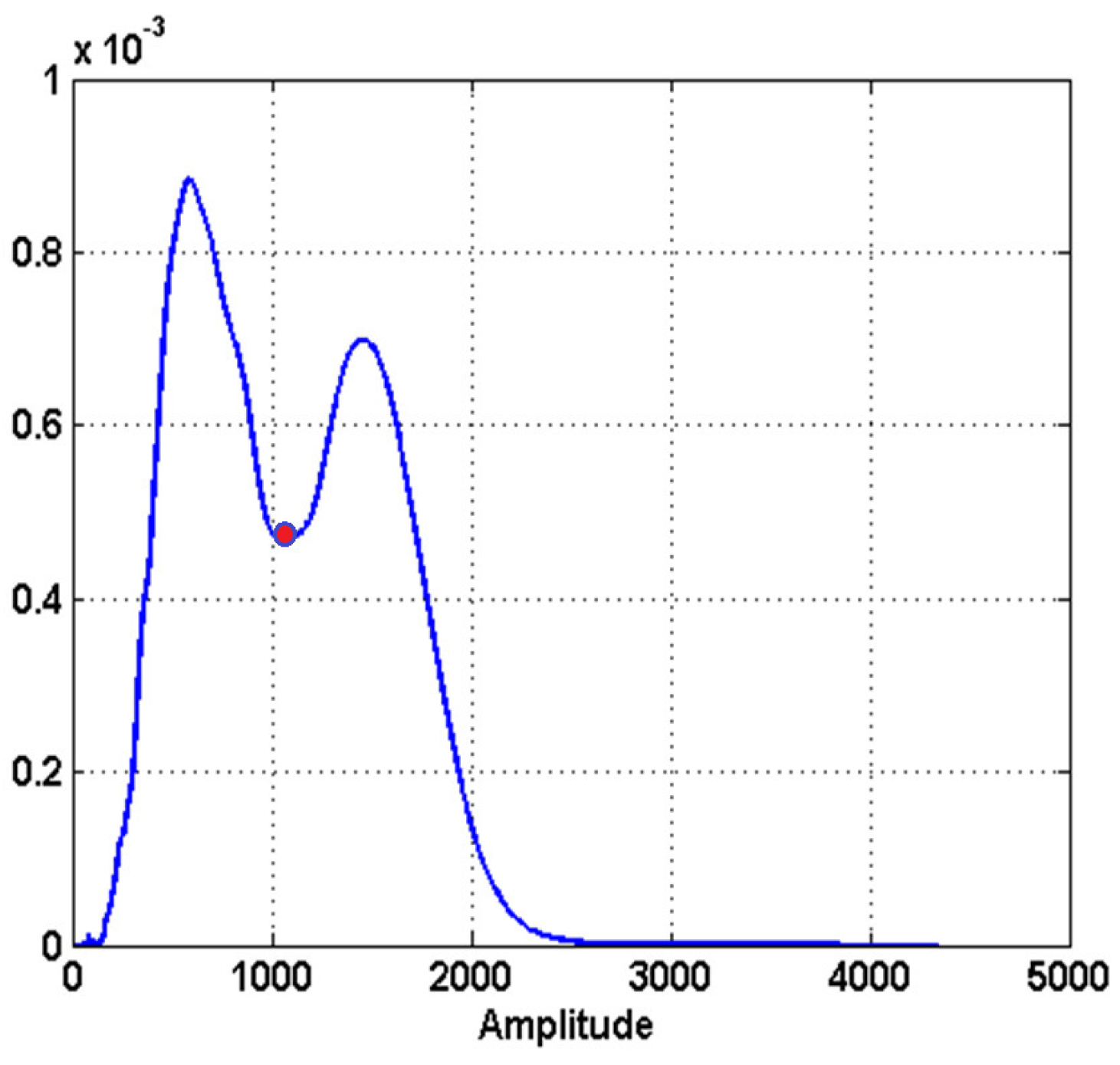
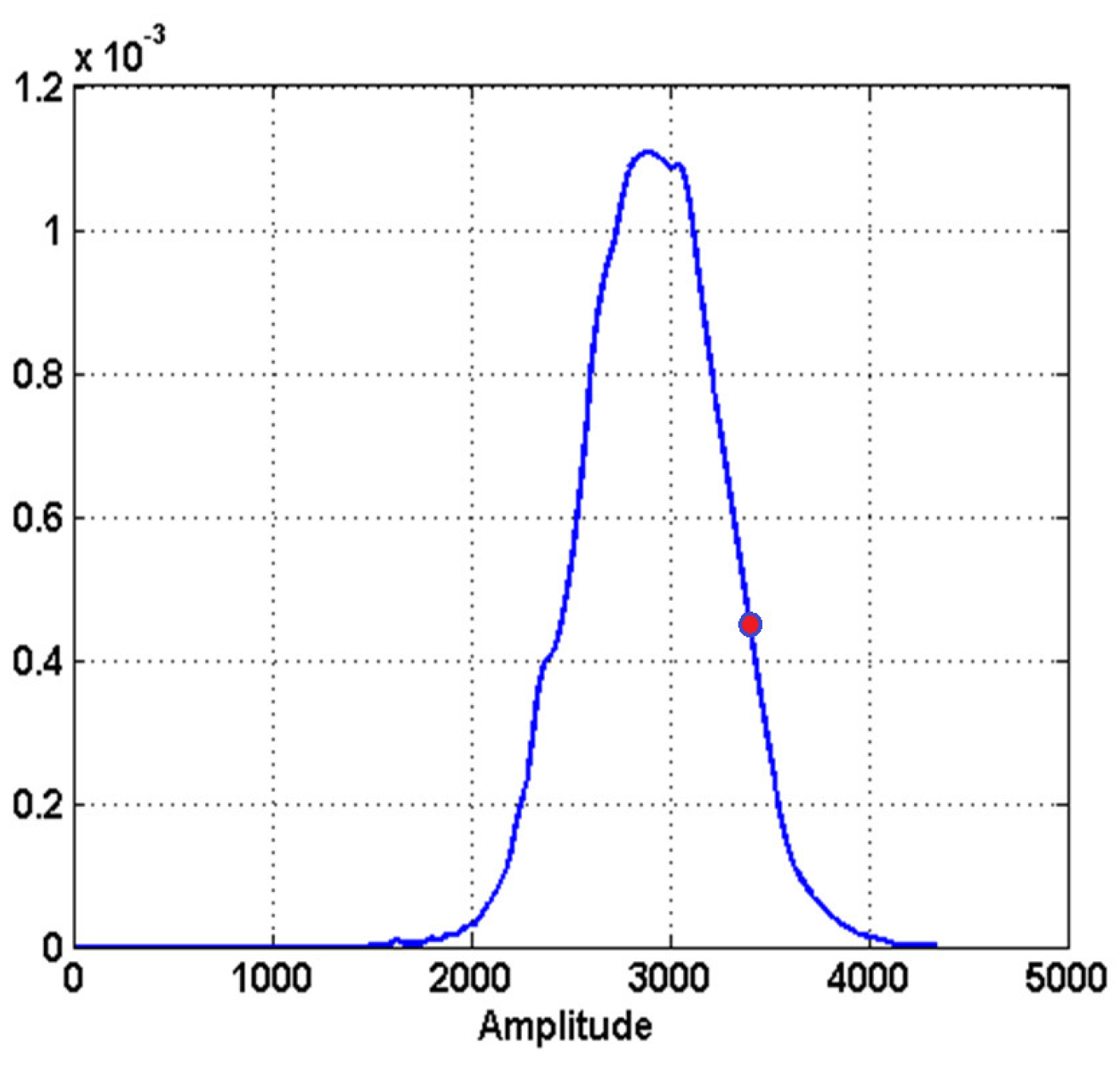
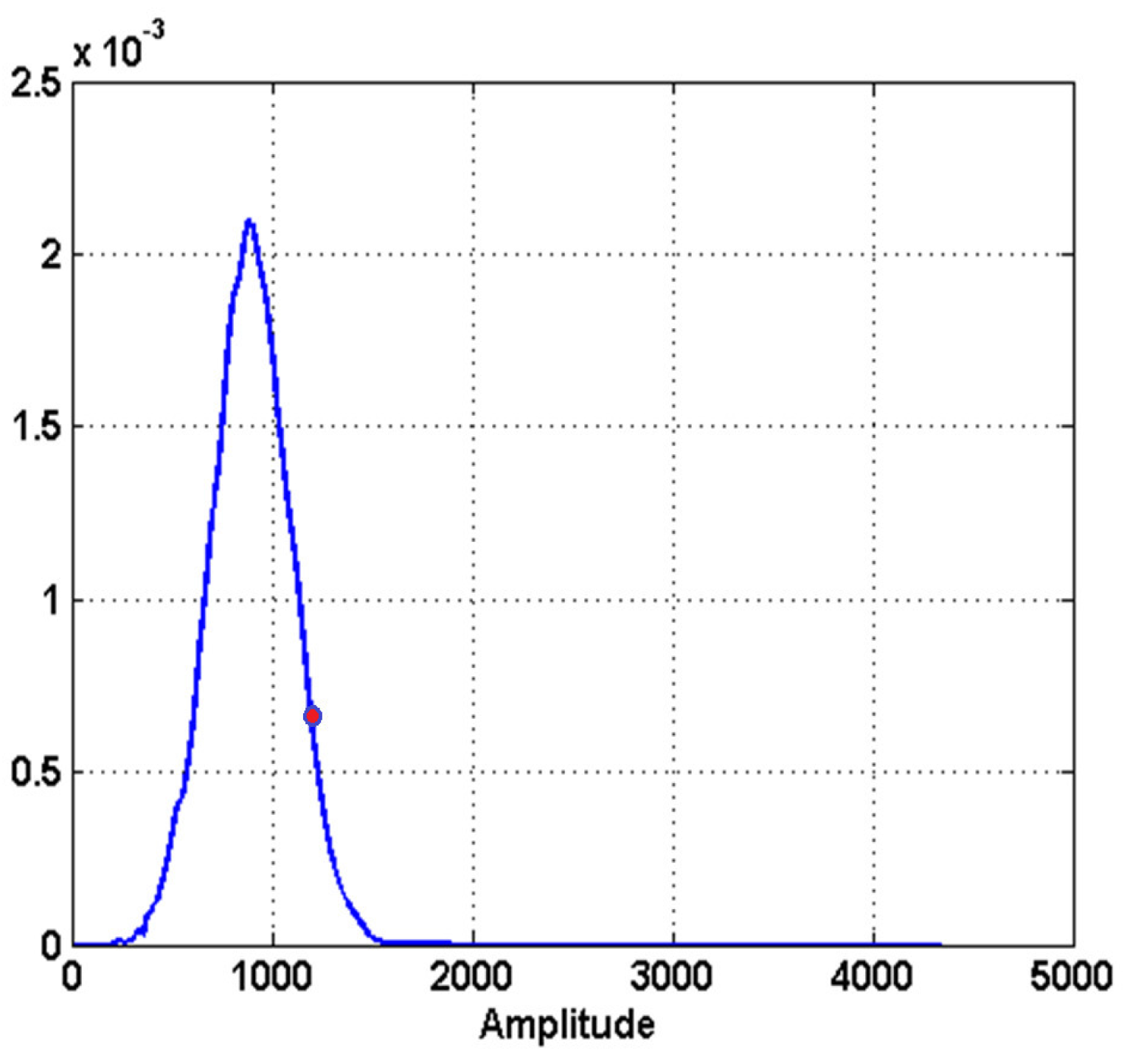
3.2.1. Image Segmentation
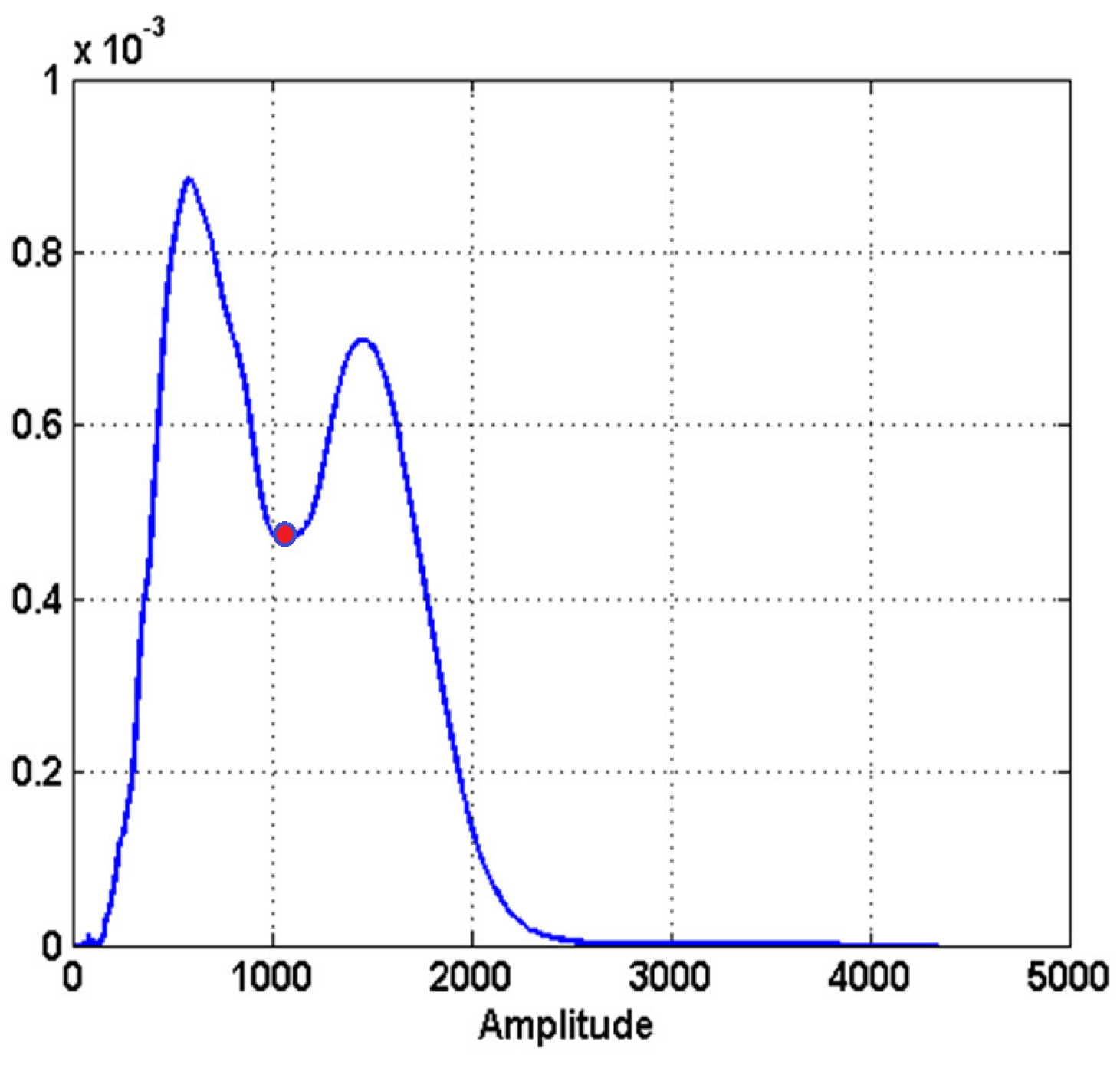
- Step 1: search the smaller among all of the maxima of the PDF of the data in the block under observation ();
- Step 2: estimate the derivative of the PDF to find possible saddle points;
- Step 3: sort in ascending order the value of saddle points and keep as a candidate threshold the smaller one;
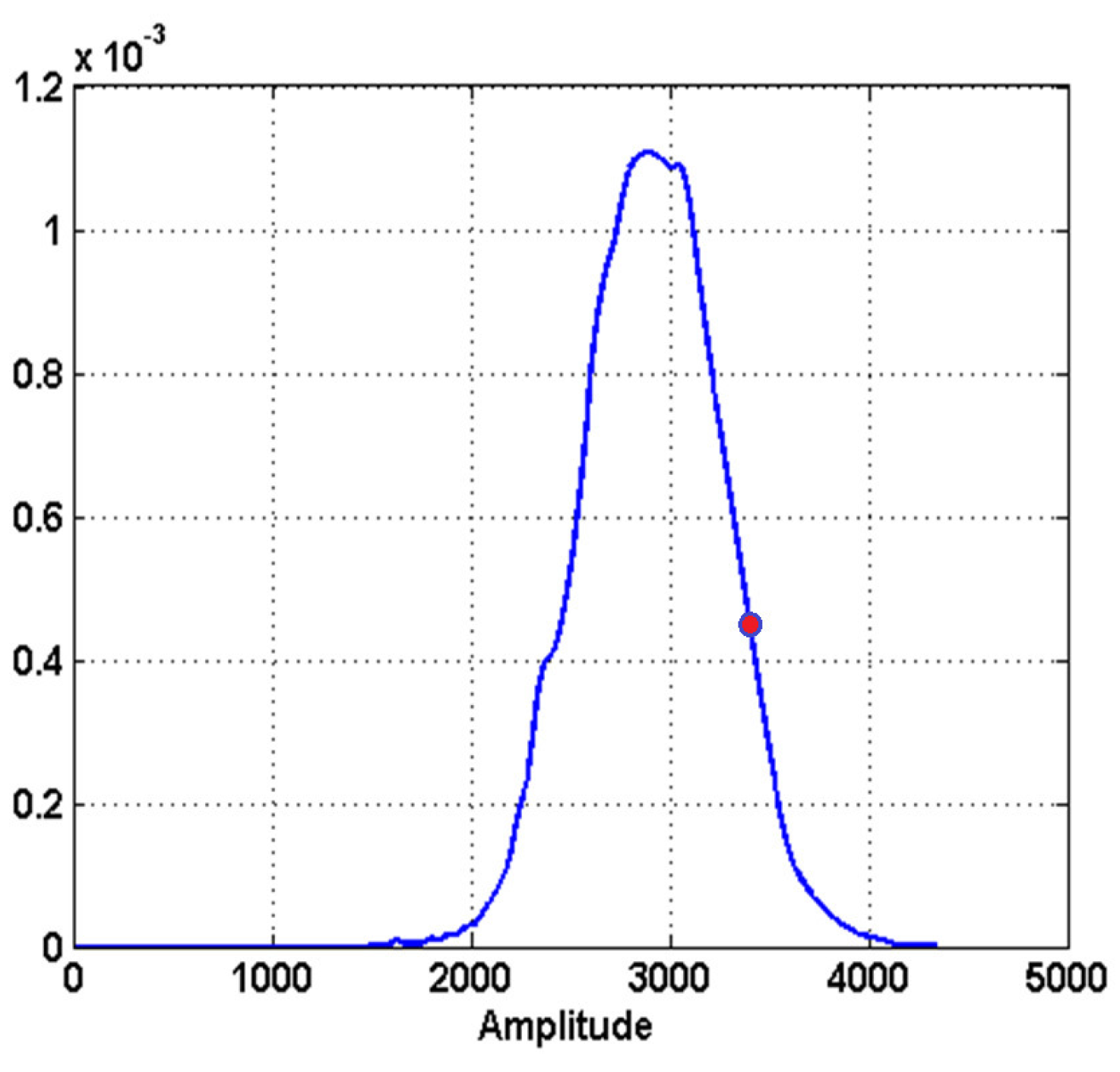
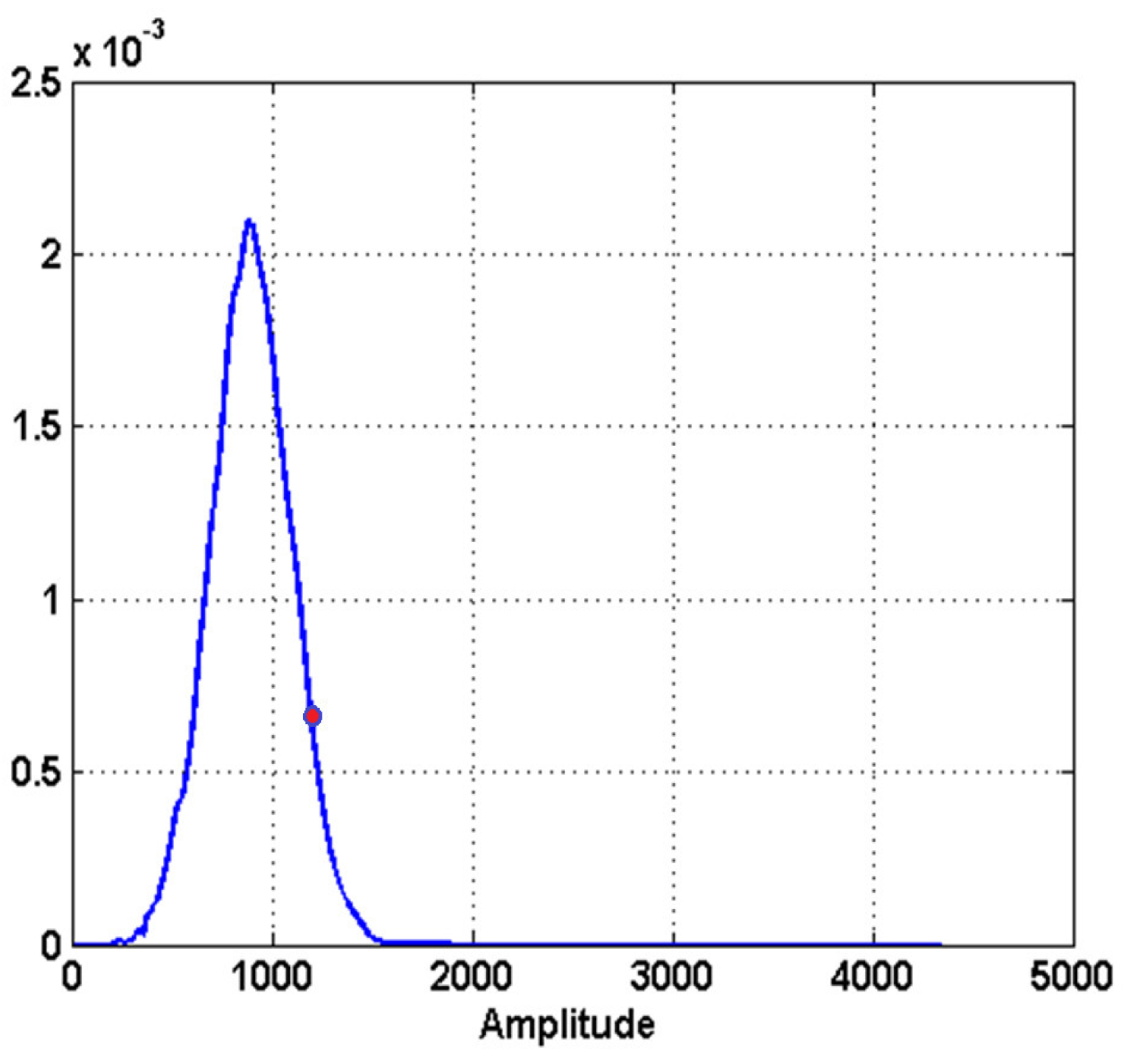
- Step 4: if no saddle points are found, select as a candidate the point that is distant by one standard deviation toward the right from the maximum of the PDF;
- Step 5: memorize the candidate and repeat for every block;
- Step 6: sort all of the candidates in ascending order;
- Step 7: choose as a threshold the first candidate in ascending order whose amplitude is greater than .
3.2.2. Classification
3.2.3. Oil Spill Direction Estimation
3.3. Ship Detection
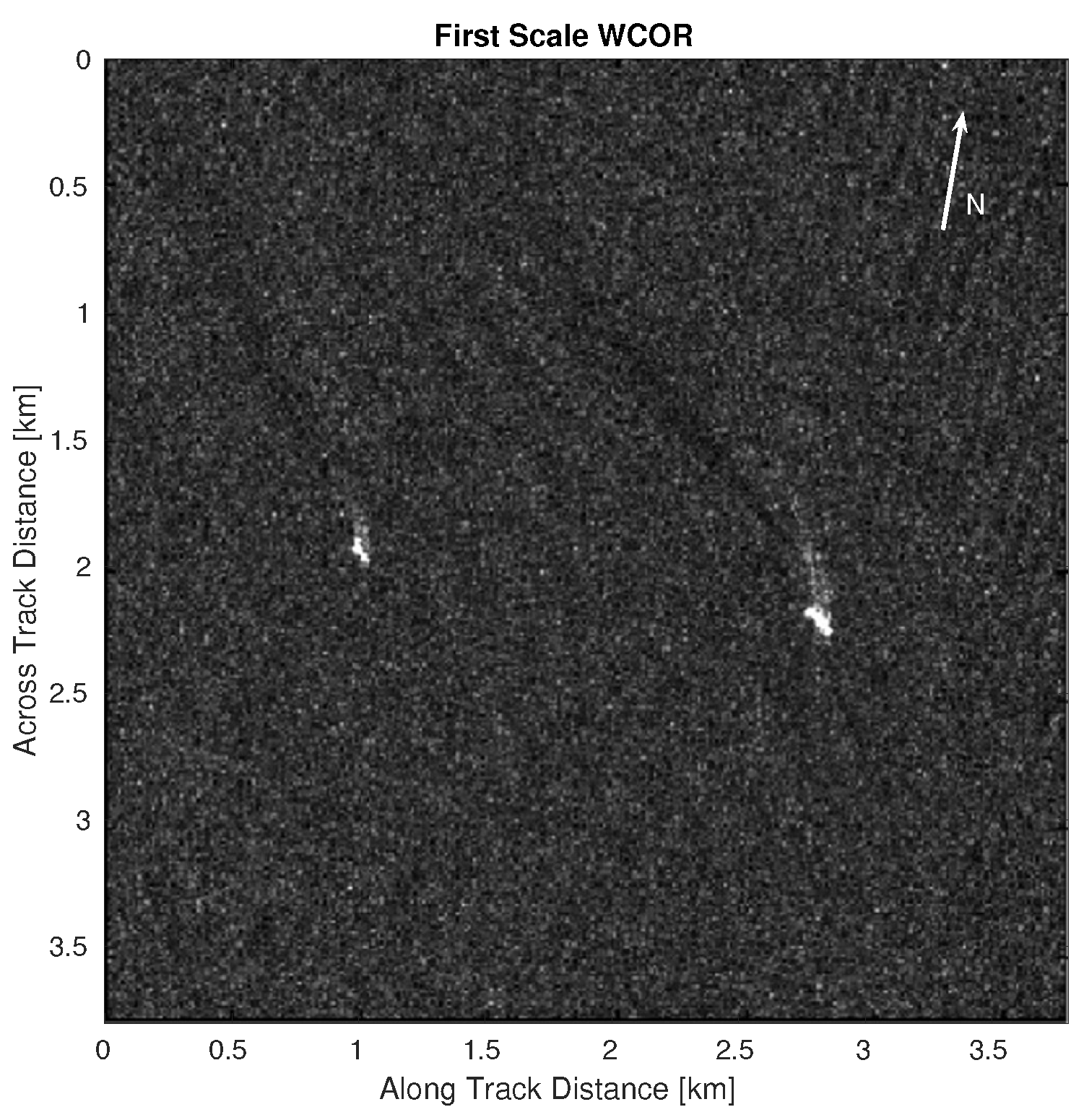
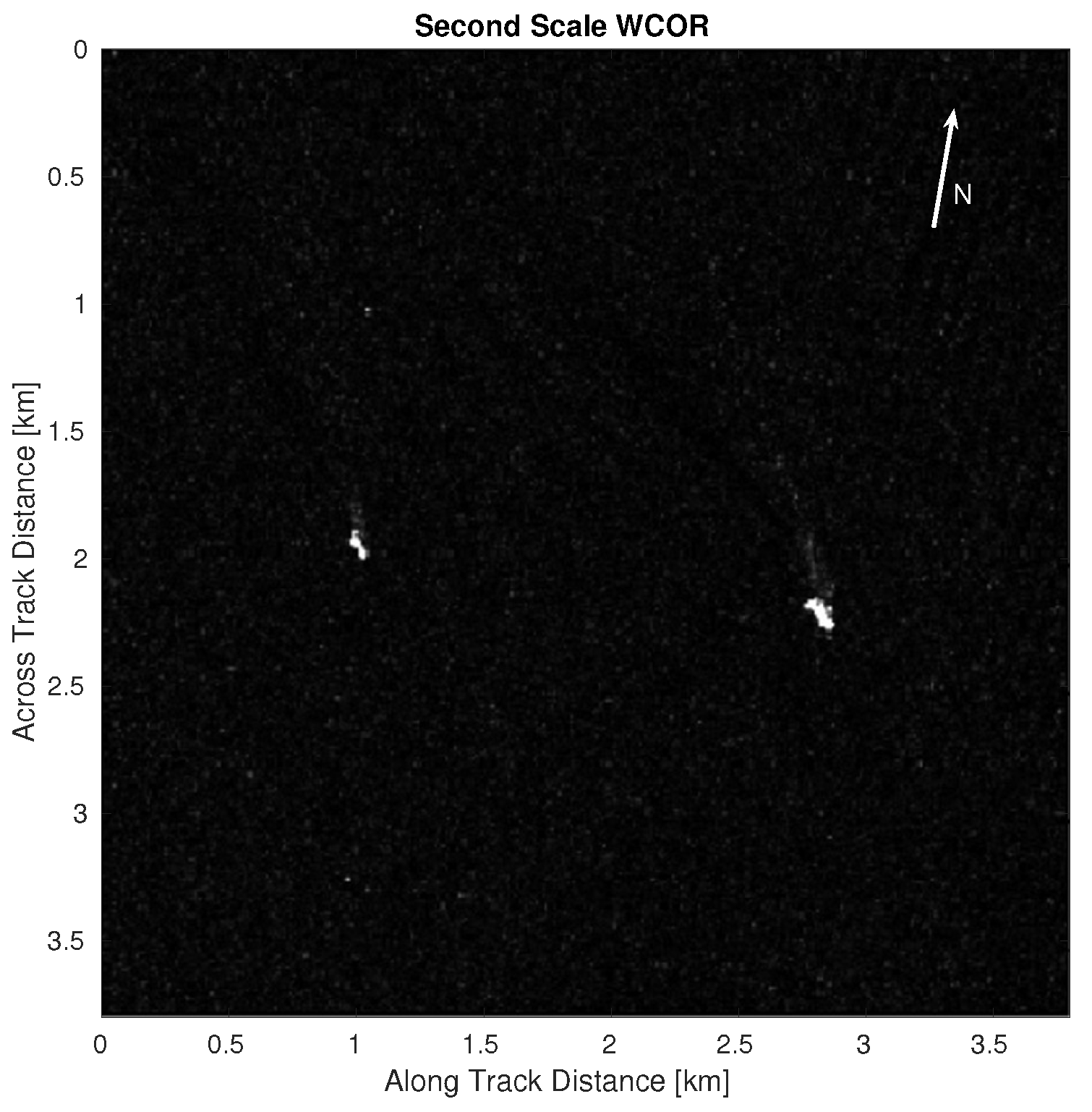
3.3.1. SAR Image Preprocessing (Wavelet Correlator)
3.3.2. S-Detector
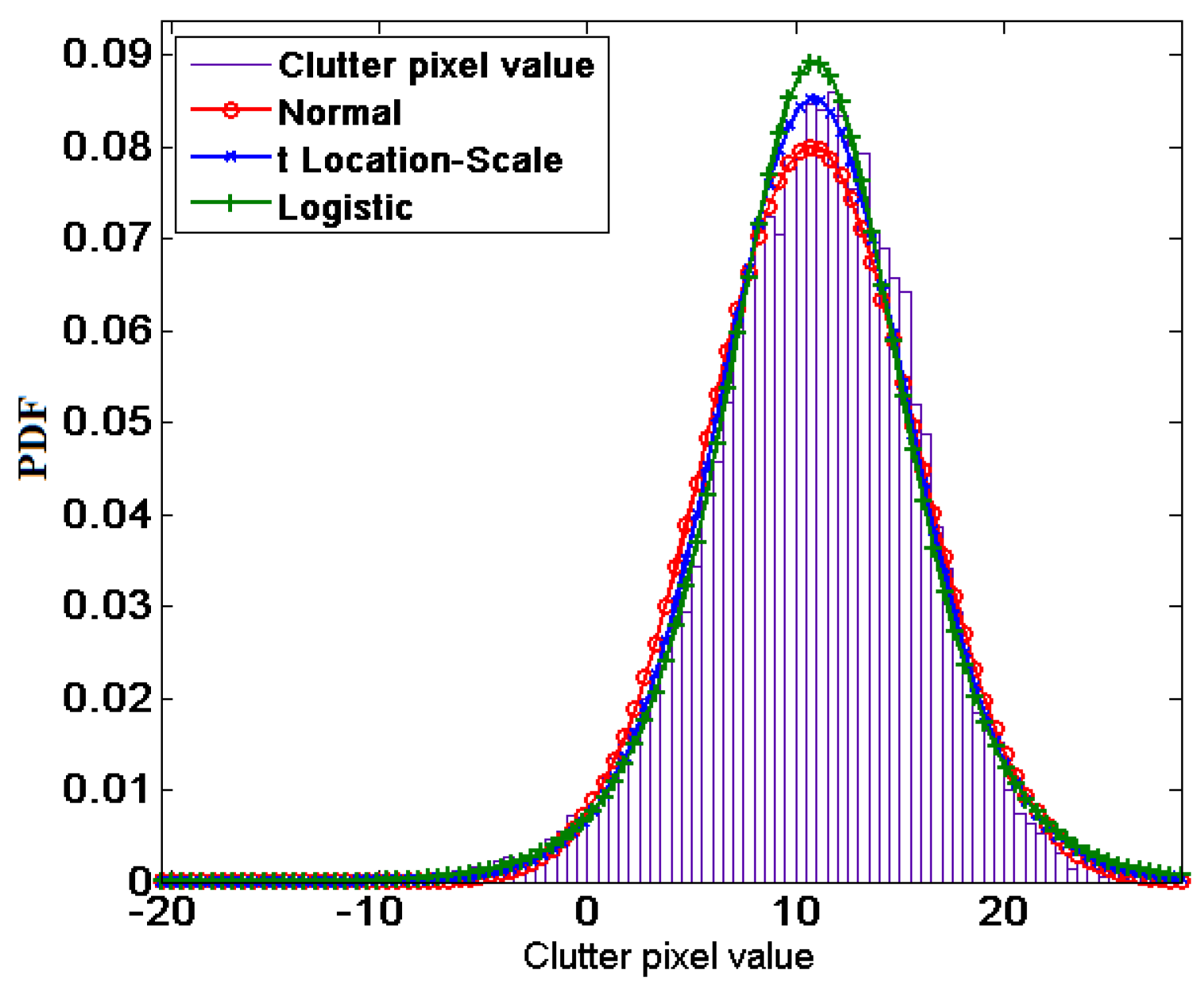
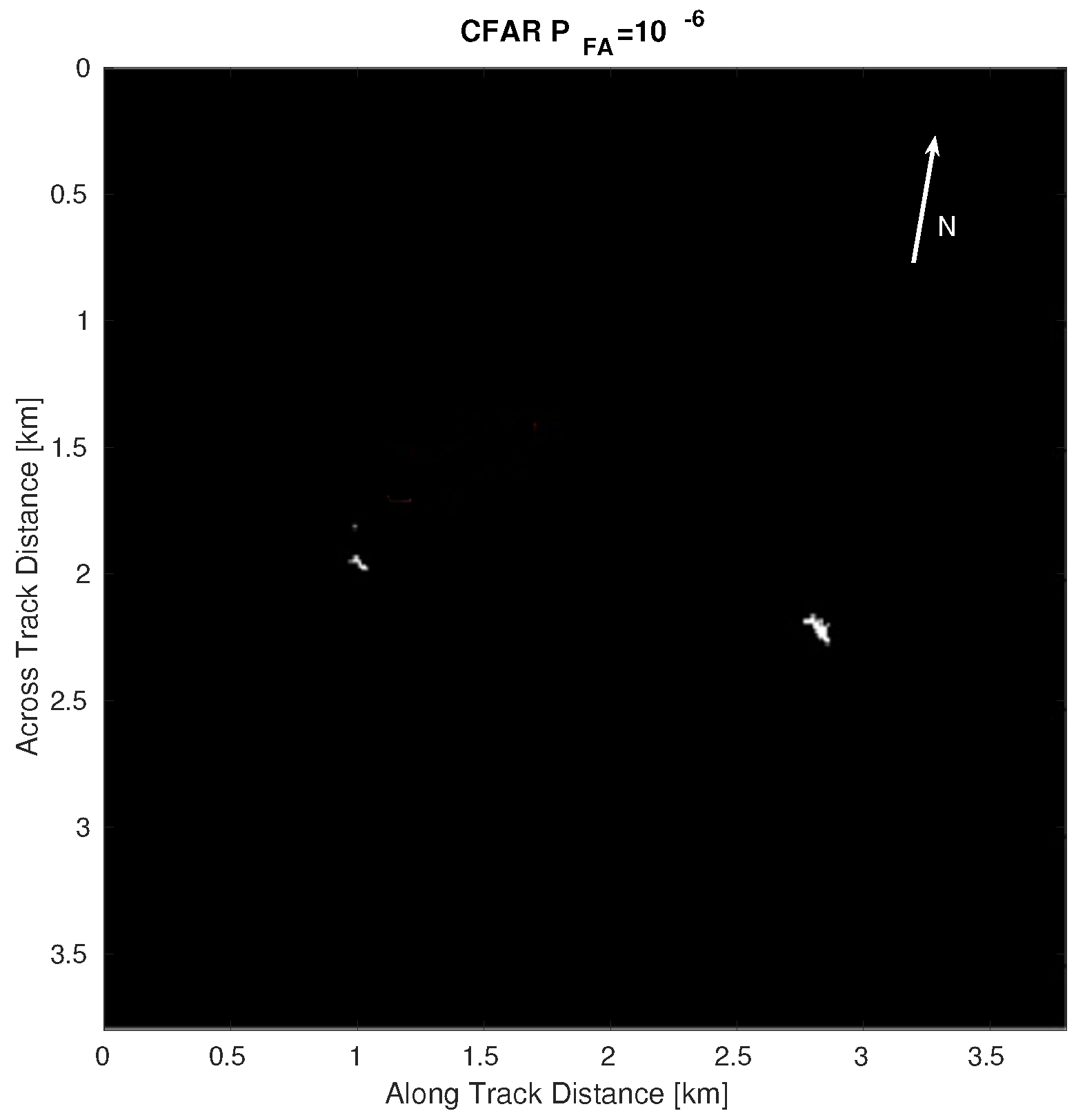
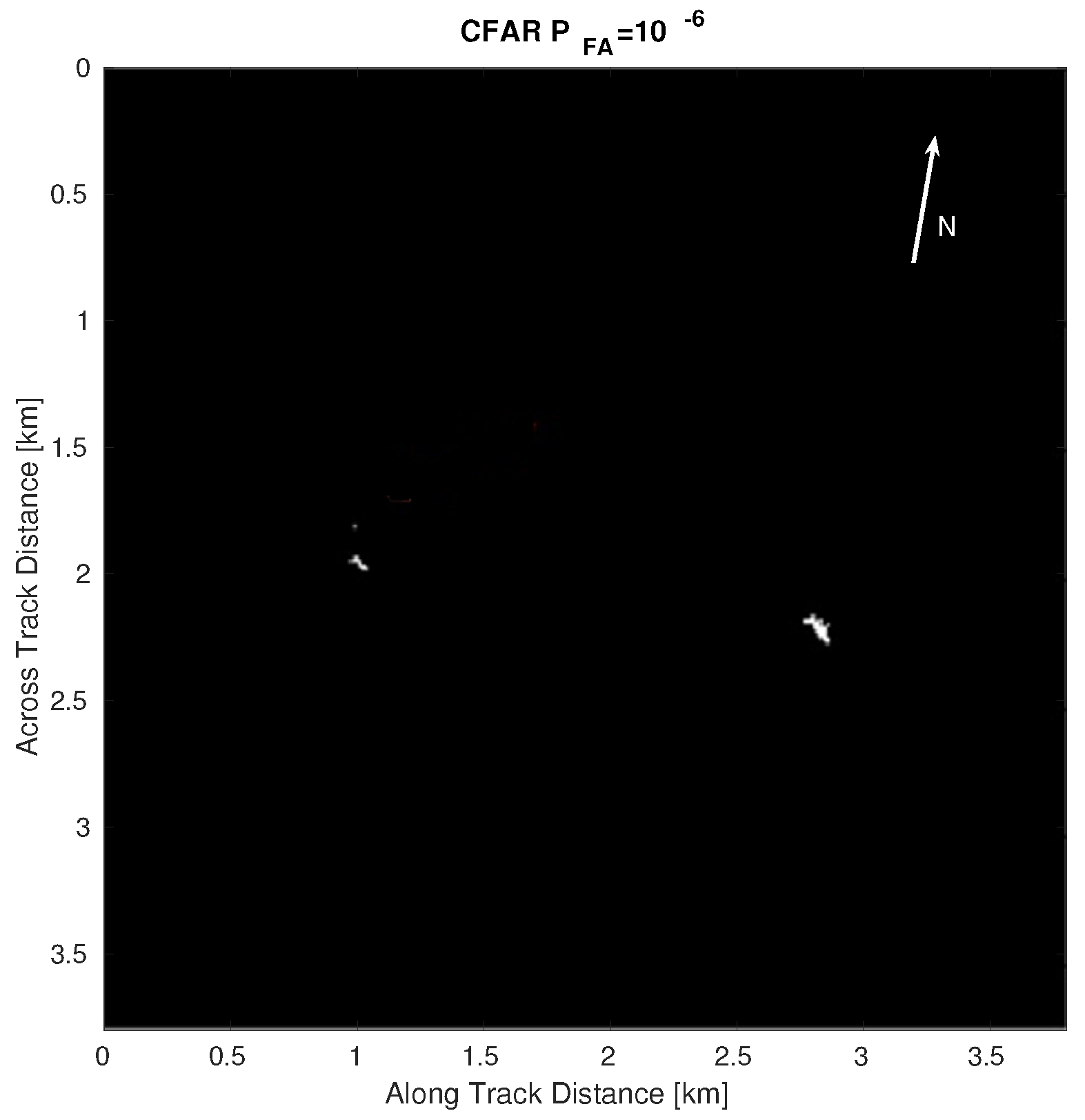
3.3.3. W-CFAR
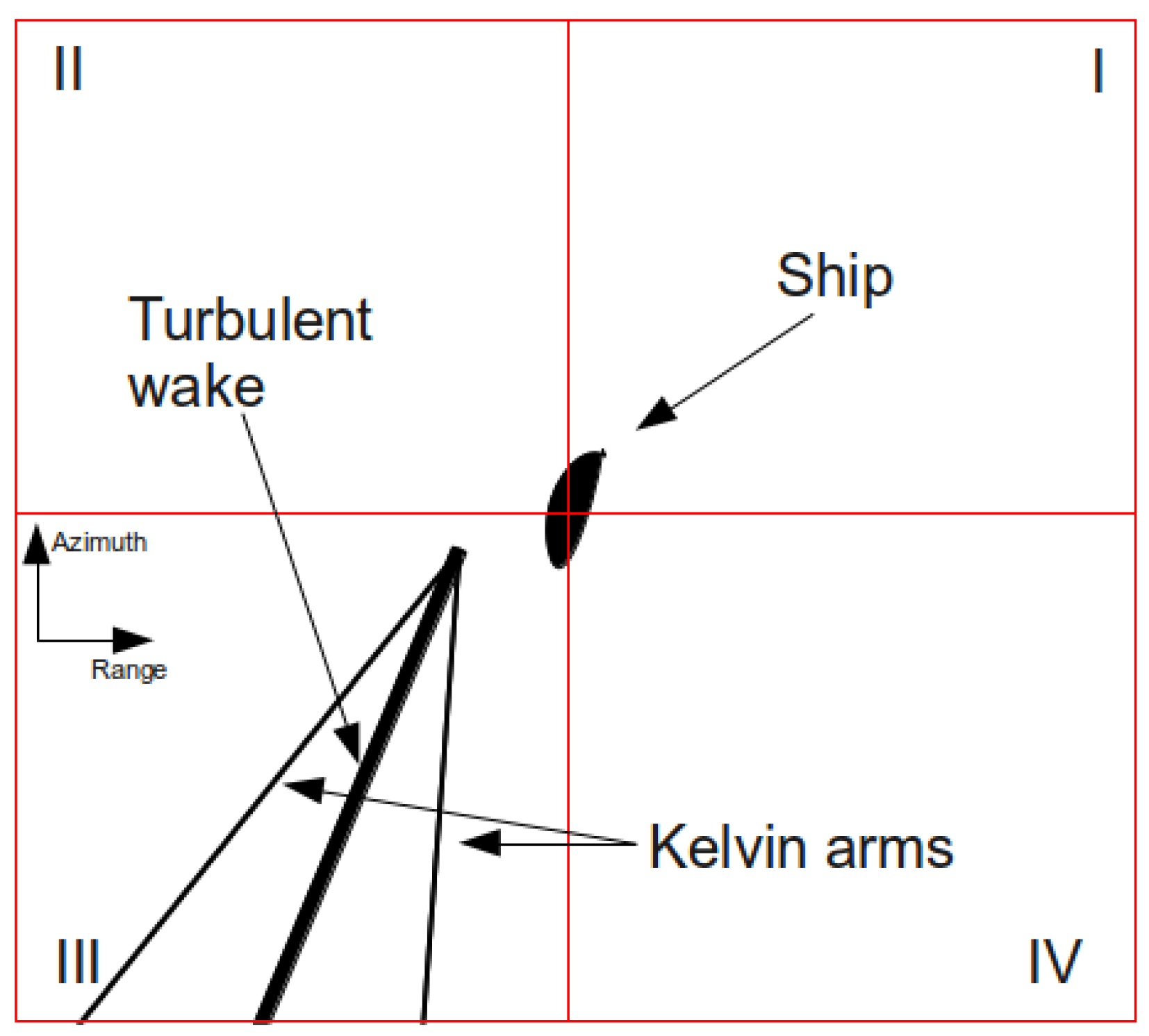
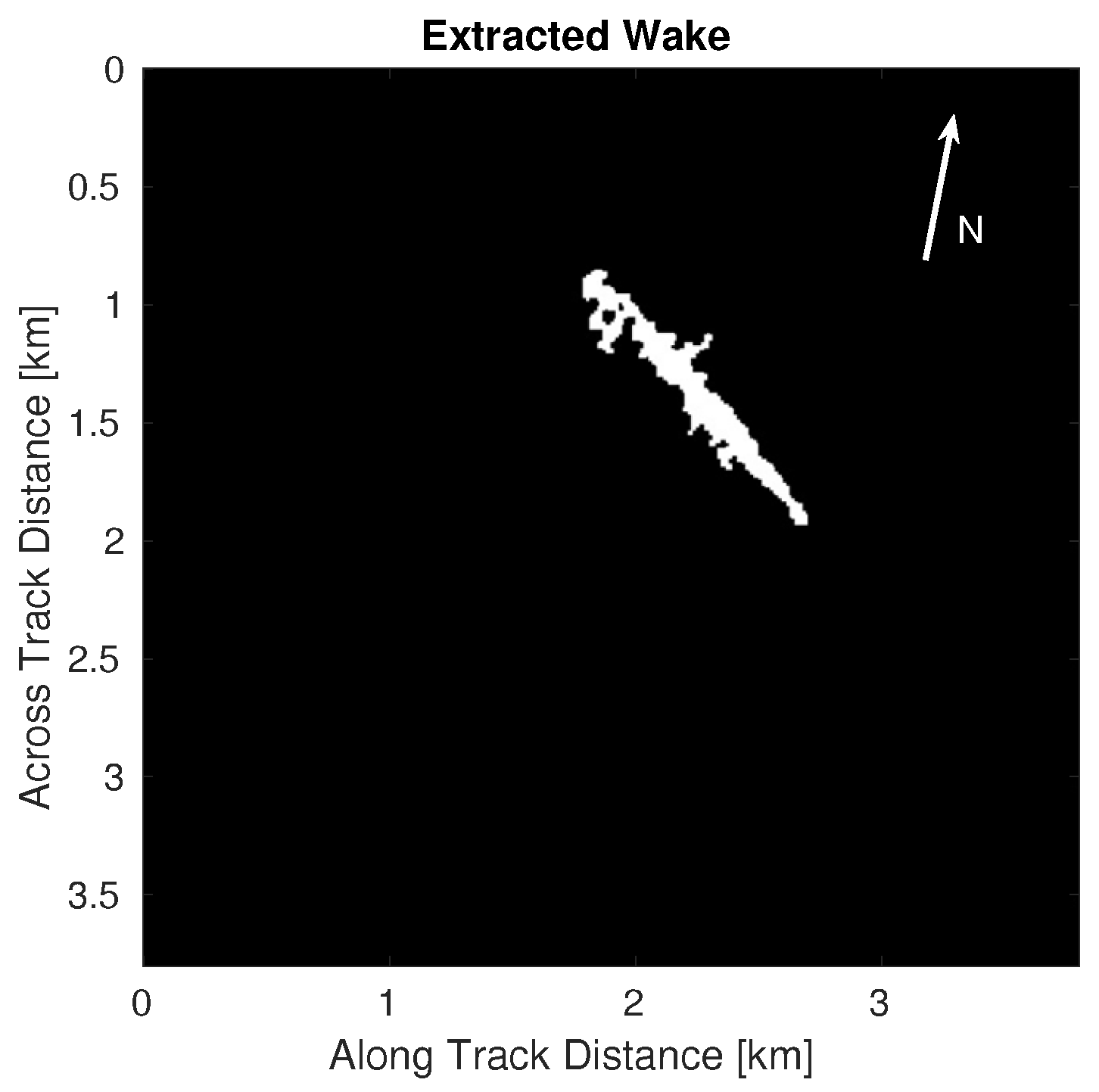
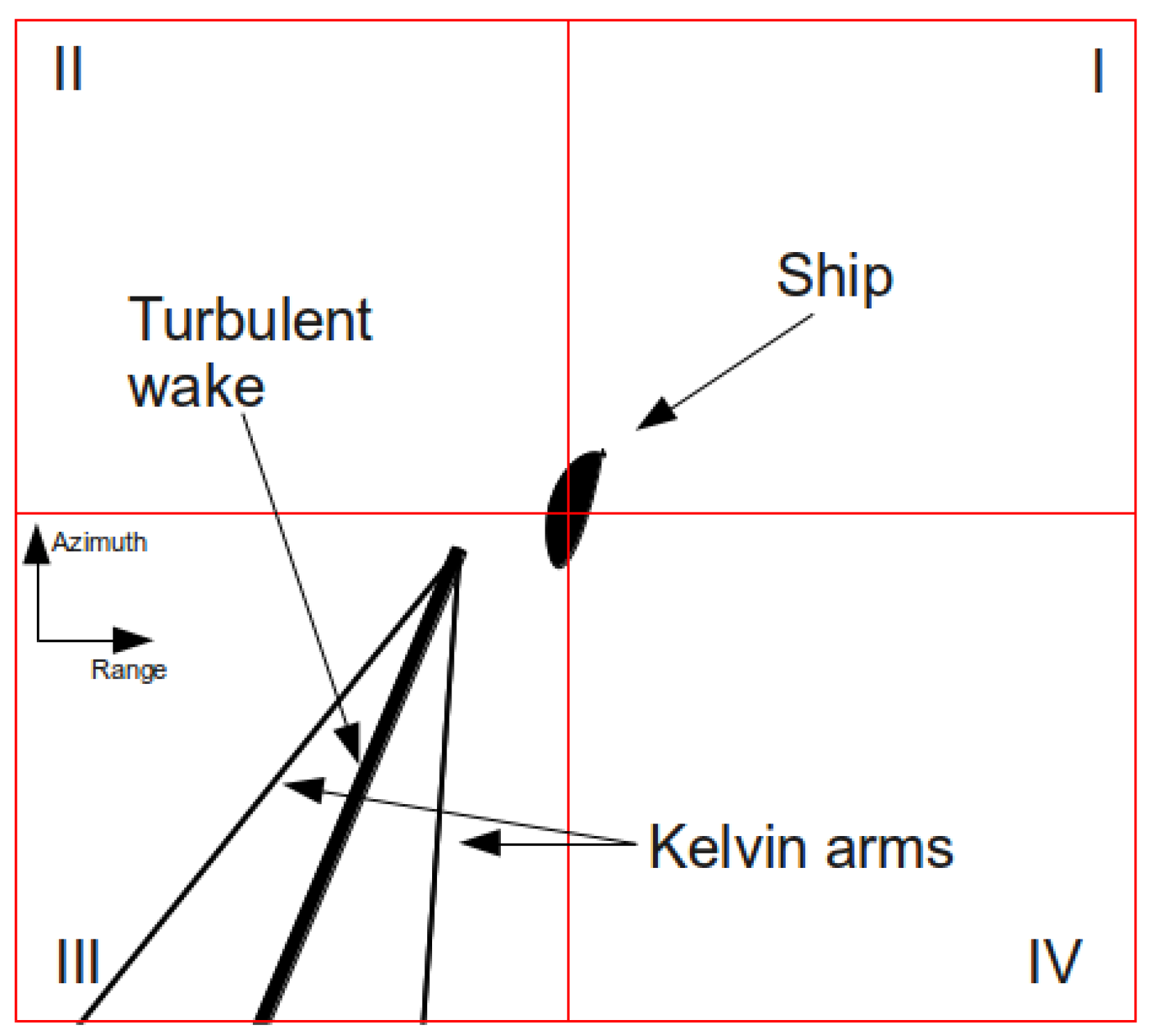
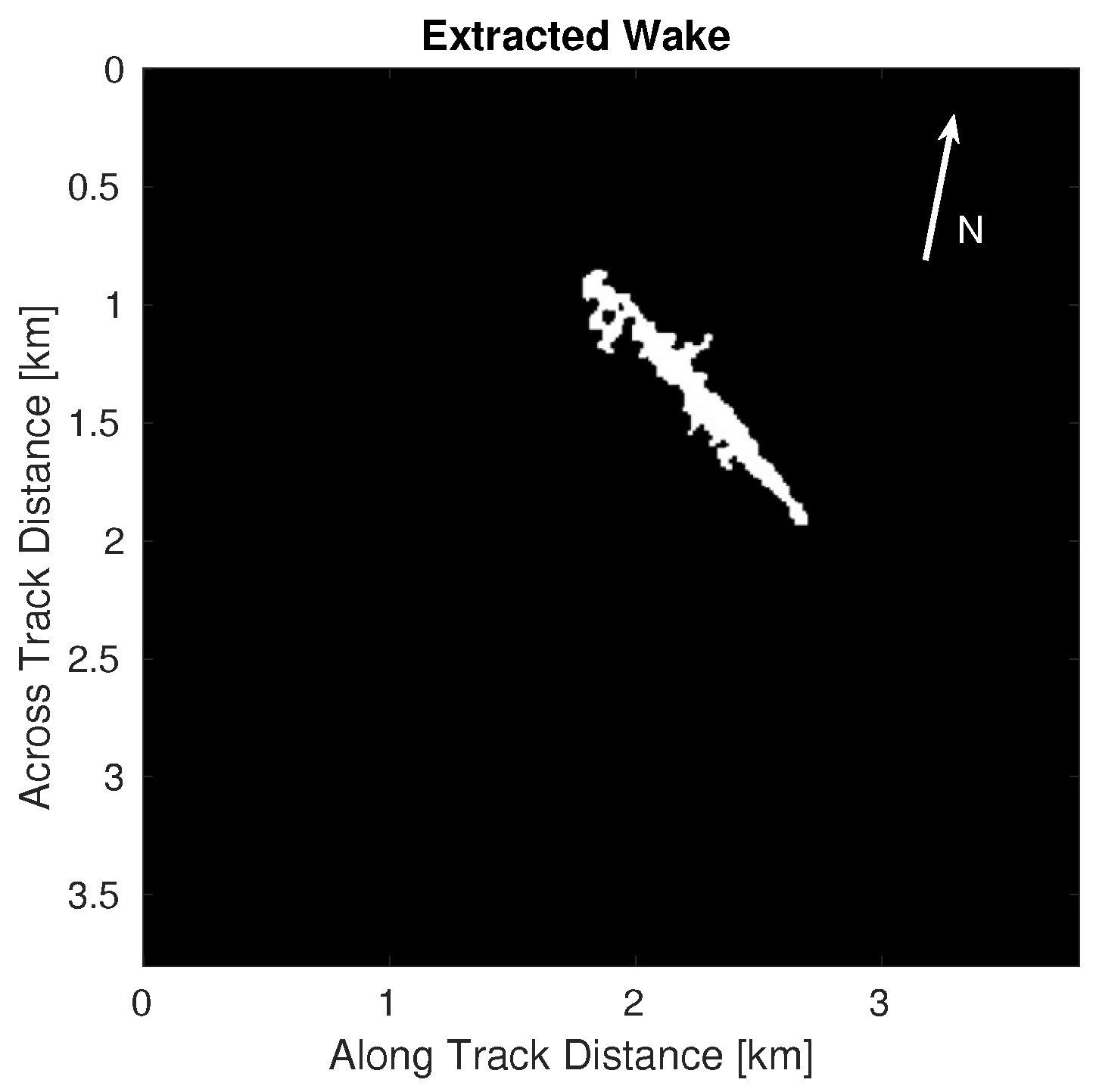
3.4. Ship’s Direction Estimation
- wake extraction (performed by means of segmentation algorithm with different parameters);
- DRT over four quarters of the window.
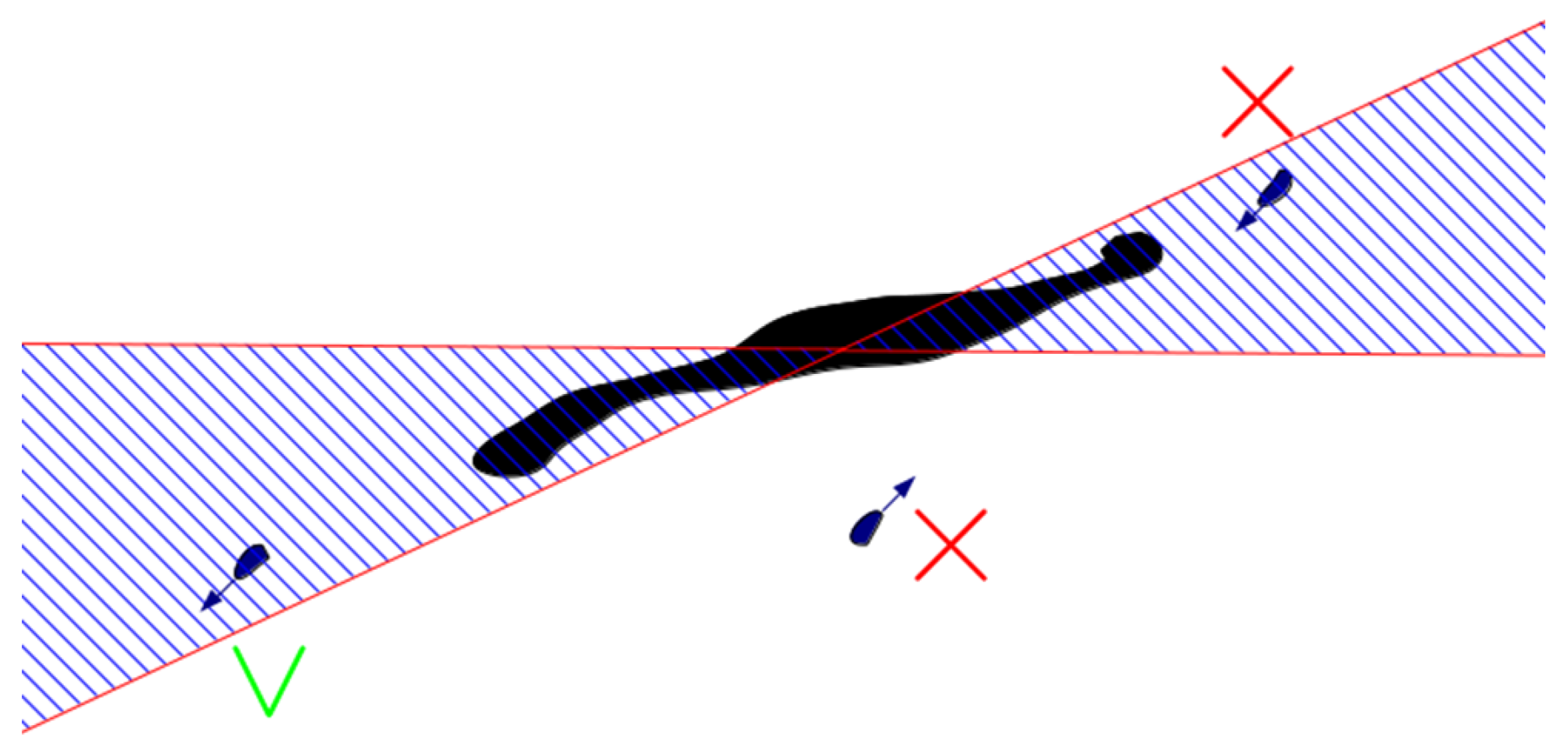
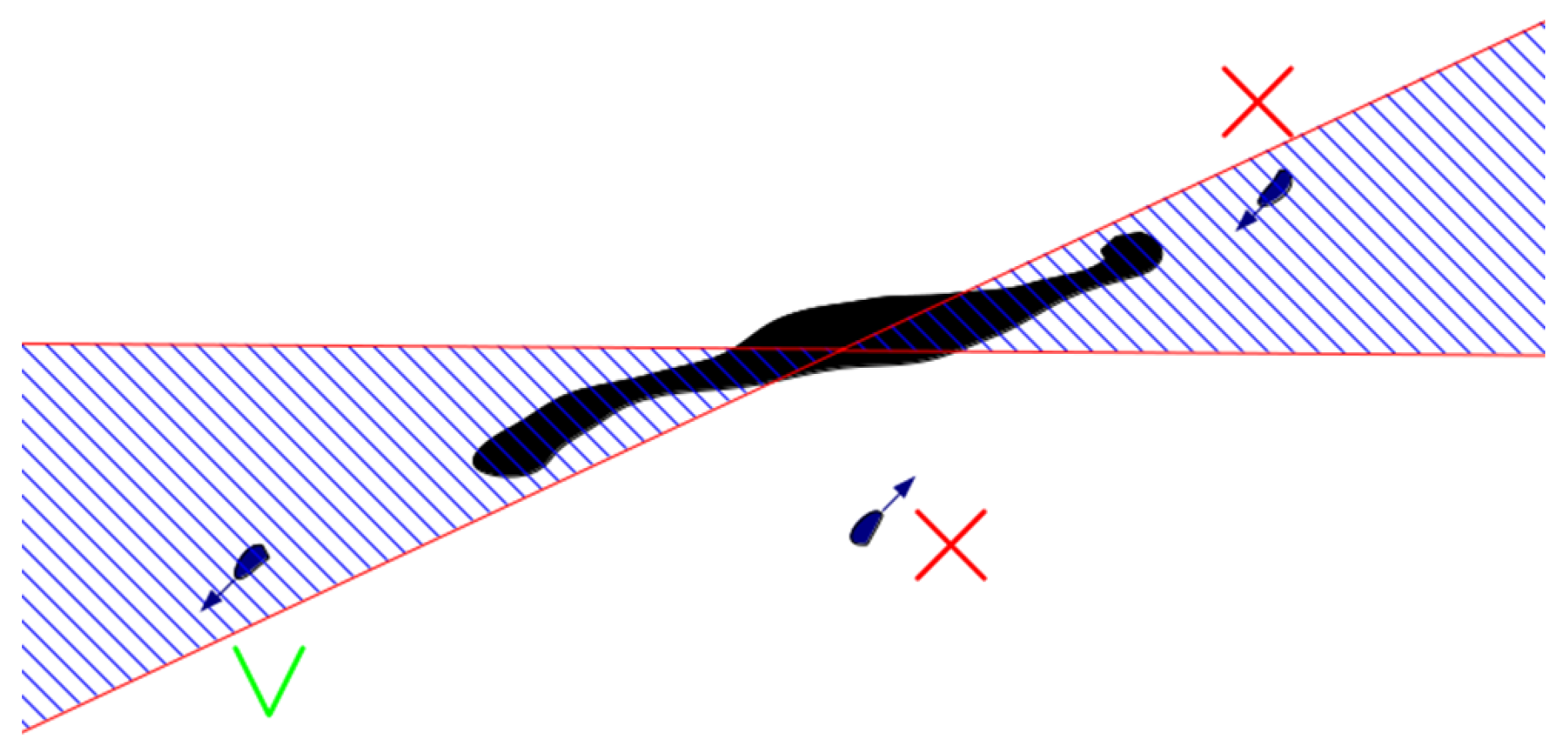
3.5. Correlation between Oil Spill and Ship
- the ship must belong to the angular sector;
- the ship’s position and direction must be consistent with the oil spill position and direction.
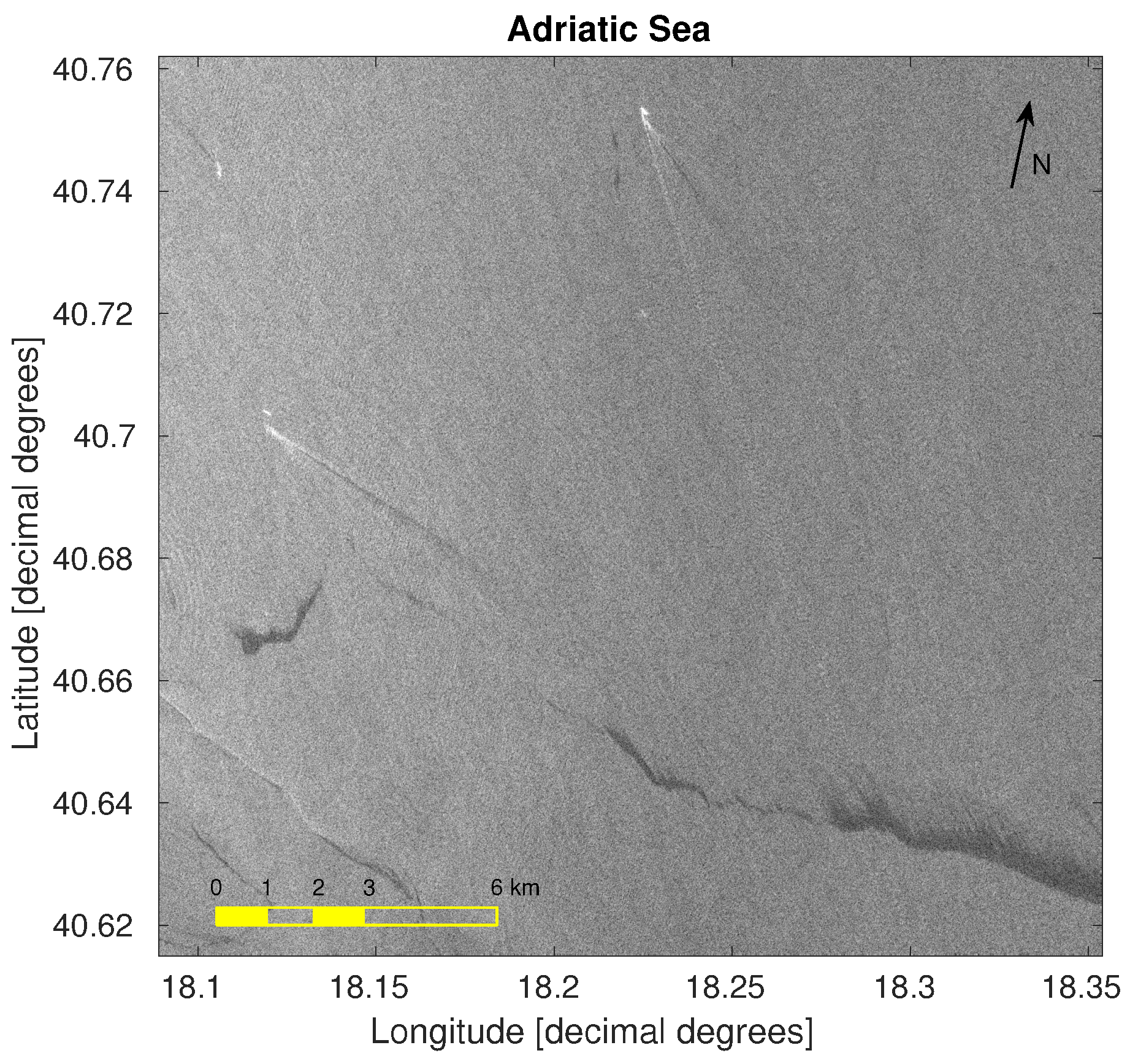
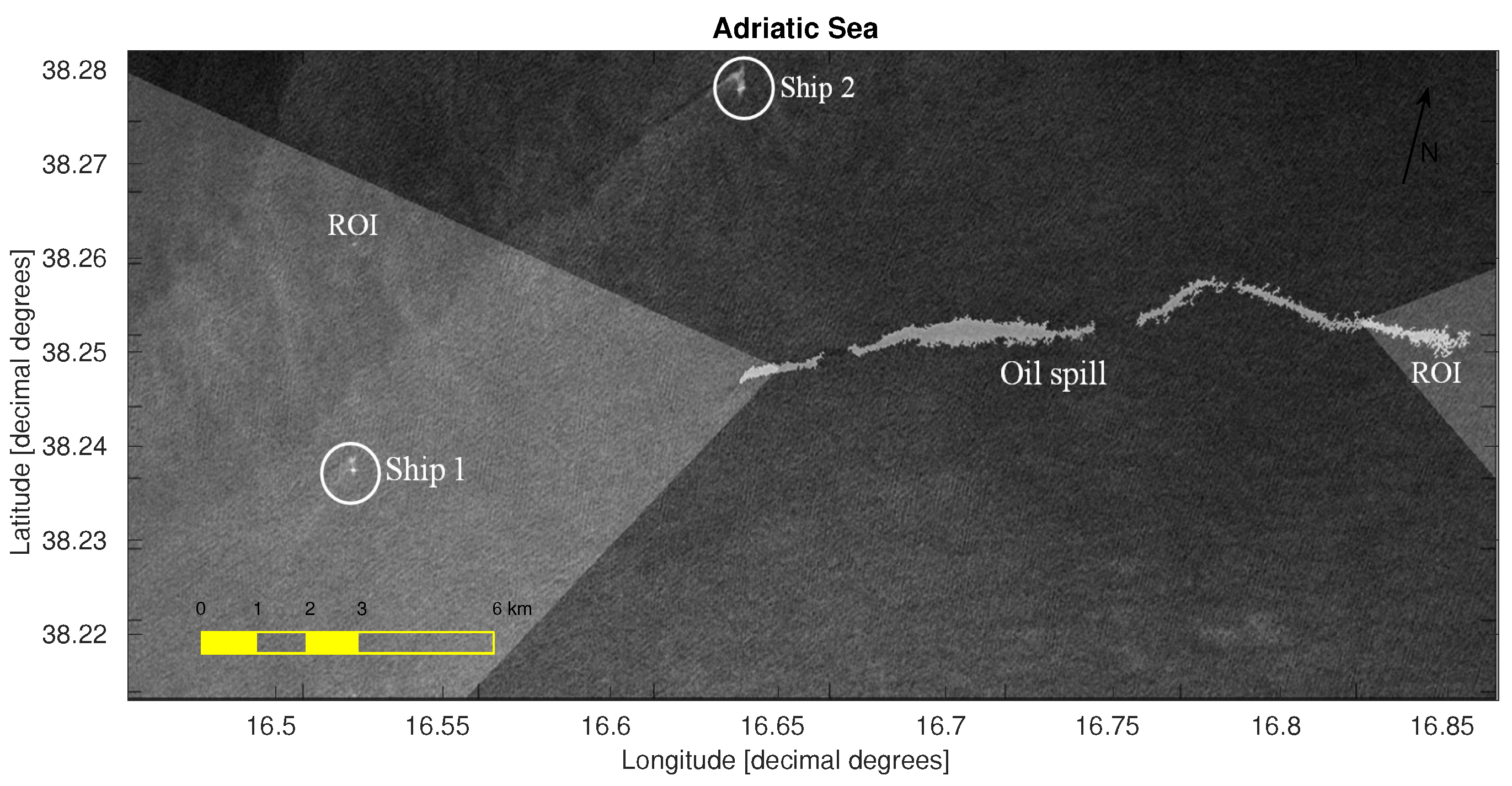
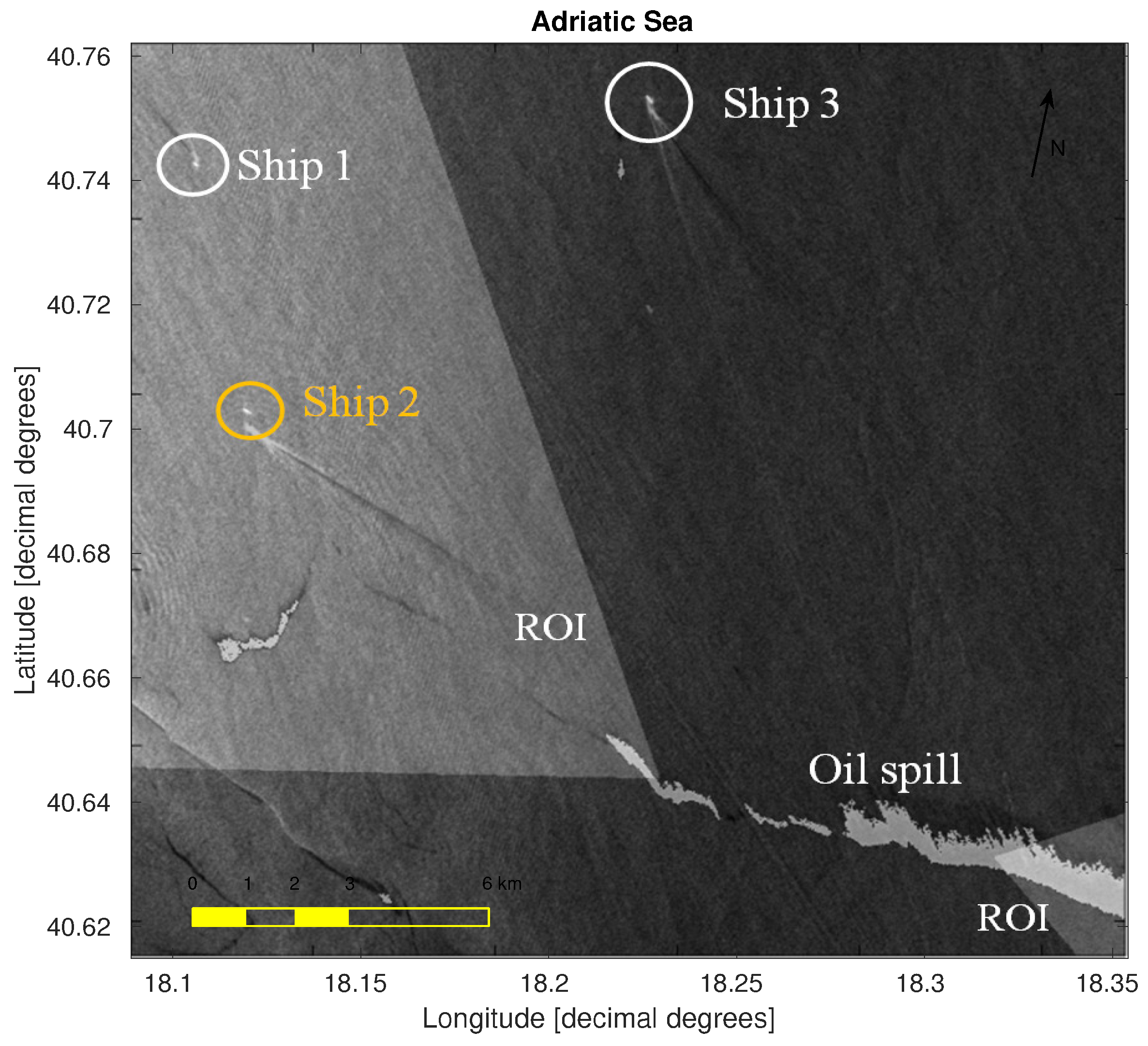
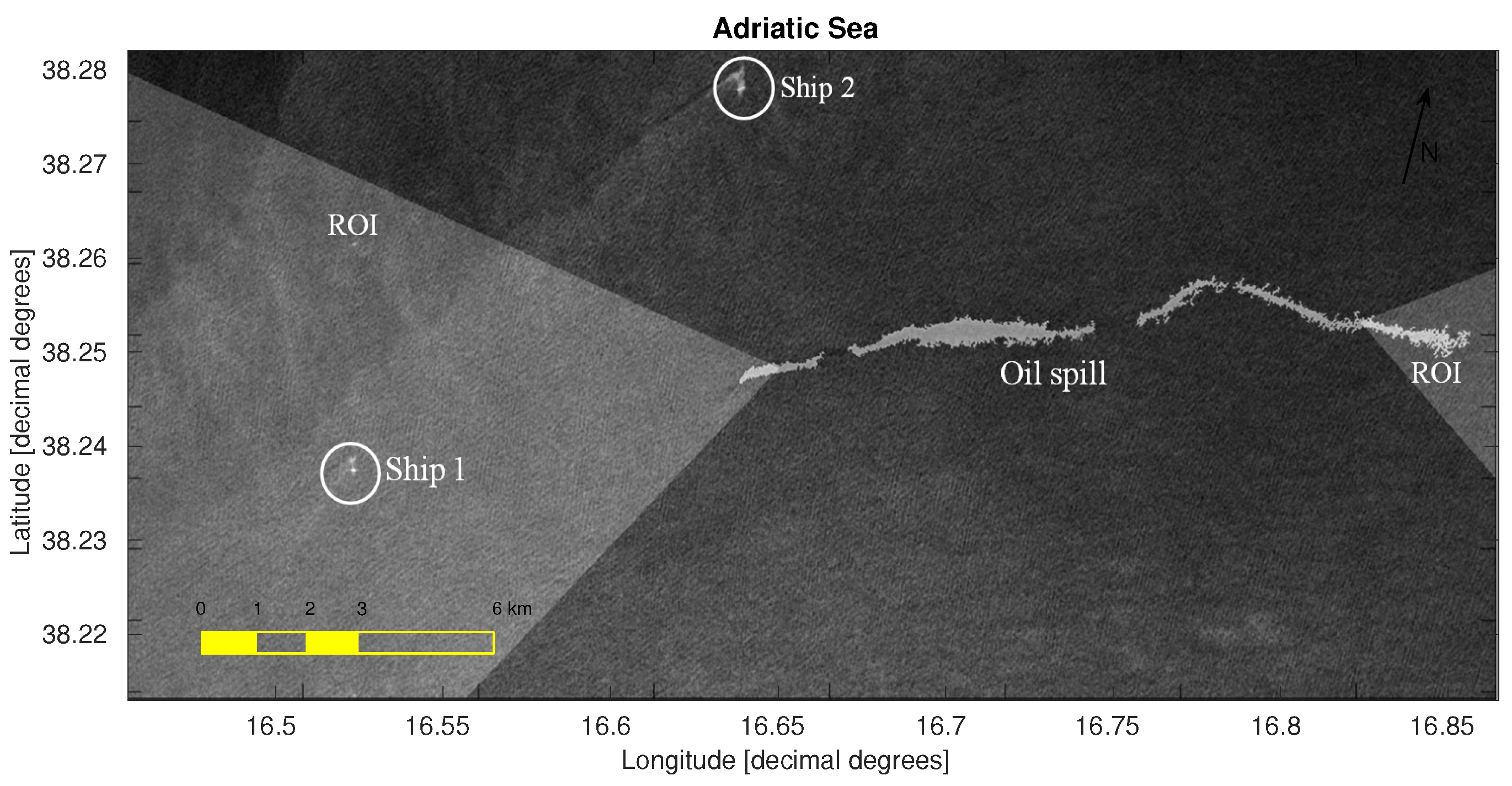
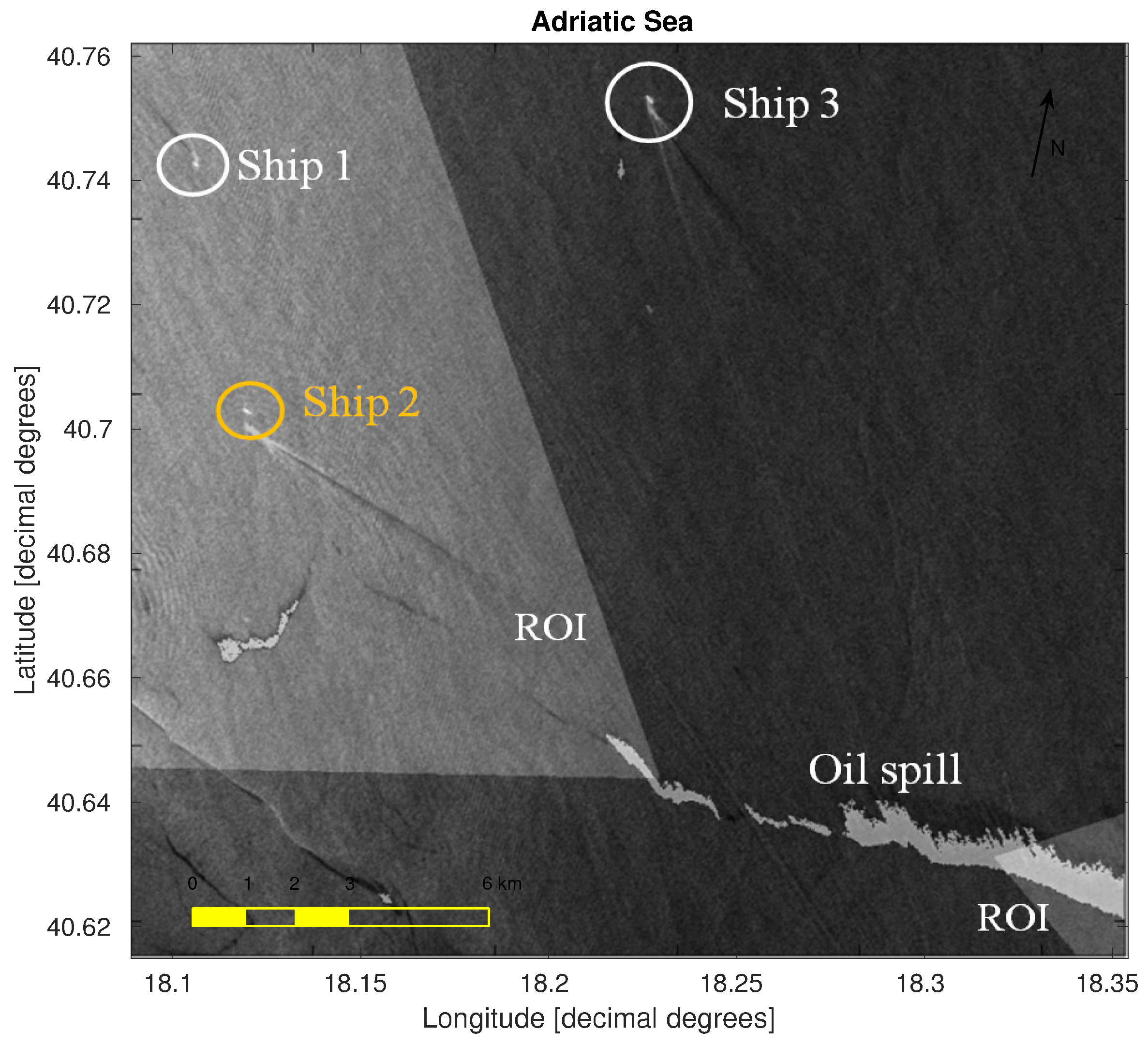
4. Ship-Spill Correlation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AIS | Automatic Identification System |
| CFAR | Constant False Alarm Rate |
| CSK | COSMO-SkyMed |
| DOAJ | Directory of Open Access Journals |
| DRT | Discrete Radon Transform |
| EMSA | European Maritime Safety Agency |
| FEXP | Fractional EXPonential |
| GEV | Generalized Extreme Value |
| HH | Horizontal-Horizontal |
| KDE | Kernel Density Estimation |
| LRD | Long-Range Dependence |
| MDPI | Multidisciplinary Digital Publishing Institute |
| Probability Density Function | |
| PSD | Power Spectral Density |
| ROI | Region Of Interest |
| RS | Radon Space |
| SAR | Synthetic Aperture Radar |
| SLC | Single Look Complex |
| SRD | Short Range Dependence |
| WCOR | Wavelet CORrelator |
References
- Galland, F.; Réfrégier, P.; Germain, O. Synthetic Aperture Radar oil spill segmentation by stochastic complexity minimization. Geosci. Remote Sens. Lett. 2004, 1, 295–299. [Google Scholar] [CrossRef]
- Oil Spill Detection Examples: Maersk Kiera. Available online: http://www.emsa.europa.eu/csn-menu/csn-service/oil-spill-detection-examples/item/1873-oil-spill-detection-examples-maersk-kiera-february-2012.html (accessed on 2 March 2017).
- Migliaccio, M.; Gambardella, A.; Tranfaglia, M. SAR Polarimetry to Observe Oil Spills. IEEE Trans. Geosci. Remote Sens. 2007, 45, 506–511. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Gambardella, A.; Migliaccio, M.; De Grandi, G. Wavelet polarimetric SAR signature analysis of sea oil spills and look-alike features. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 983–986.
- Migliaccio, M.; Ferrara, G.; Gambardella, A.; Nunziata, F. A new stochastic model for oil spill observation by means of single-look SAR data. In Proceedings of the 2006 IEEE US/EU Baltic International Symposium, Klaipeda, Lithuania, 23–26 May 2006; pp. 1–6.
- Shirvany, R.; Chabert, M.; Tourneret, J.Y. Ship and Oil-Spill Detection Using the Degree of Polarization in Linear and Hybrid/Compact Dual-Pol SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 885–892. [Google Scholar] [CrossRef] [Green Version]
- Migliaccio, M.; Ferrara, G.; Gambardella, A.; Nunziata, F.; Sorrentino, A. A Physically Consistent Speckle Model for Marine SLC SAR Images. IEEE J. Ocean. Eng. 2007, 32, 839–847. [Google Scholar] [CrossRef]
- Bertacca, M.; Berizzi, F.; Dalle Mese, E. Long-Range Dependence Models for the Analysis and Discrimination of Sea-Surface in Sea SAR Imagery. In Image Processing for Remote Sensing, 1st ed.; Chen, C.H., Ed.; CRC Press: New York, NY, USA, 2007; pp. 189–223. [Google Scholar]
- Mansourpour, M.; Rajabi, M.A.; Blais, J.A.R. Effects and performance of speckle noise reduction filters on active radar and SAR images. In Proceedings of the 2006 International Society of Photogrammetry and Remote Sensing Symposium, Ankara, Turkey, 14–16 February 2006.
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing Using MATLAB, 2nd ed.; Gatesmark Publishing: Knoxville, TN, USA, 2009. [Google Scholar]
- Epanechnikov, V. Non-Parametric Estimation of a Multivariate Probability Density. Theory Probab. Appl. 1969, 14, 153–158. [Google Scholar] [CrossRef]
- Lim, J.S. Two-Dimensional Signal and Image Processing, 15th ed.; Prentice Hall: Englewood Cliffs, NJ, USA, 1990; pp. 42–45. [Google Scholar]
- Staglianò, D.; Musetti, L.; Cataldo, D.; Baruzzi, A.; Martorella, M. Fast detection of maritime targets in high resolution SAR images. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014.
- Staglianò, D.; Lupidi, A.; Berizzi, F. Ship detection from SAR images based on CFAR and wavelet transform. In Proceedings of the 2012 Tyrrhenian Workshop on Advances in Radar and Remote Sensing, Napoli, Italy, 12–14 September 2012; pp. 53–58.
- Tello, M.; Lopez-Martinez, C.; Mallorqui, J. A novel algorithm for ship detection in SAR imagery based on the Wavelet transform. Geosci. Remote Sens. Lett. 2005, 2, 201–205. [Google Scholar] [CrossRef]
- Tello, M.; Lopez-Martinez, C.; Mallorqui, J. Automatic vessel monitoring with single and multidimensional SAR images in the wavelet domain. ISPRS J. Photogramm. Remote Sens. 2006, 61, 260–278. [Google Scholar] [CrossRef]
- Pierre Haché, J. Probability of Detection for a GO-CFAR Radar Processor Using Envelope Detection Approximation. Master’s Thesis, Naval Postgraduate School, Monterey, CA, USA, September 1994. [Google Scholar]
- Goldstein, G. False alarm regulation in log normal and weibull clutter. IEEE Trans. Aerosp. Electron. Syst. 1973, 9, 260–278. [Google Scholar] [CrossRef]
- Prewitt, J.M.S. Object Enhancement and Extraction. In Picture processing and Psychopictorics, 1st ed.; Sacks Lipkin, B., Rosenfeld, A., Eds.; Academic Press: Orlando, FL, USA, 1970; pp. 75–149. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Clean sea | 0.1206 | 216.2745 |
| Oil spill | 0.1580 | 100.4706 |
| Clean sea | 0.3737 | 49.1312 |
| Oil spill | 0.5666 | 12.8820 |
| Wind fall | 1.2004 | 1.4208 |
| Area | 8870 m |
| Length | 228 m |
| Width | 49.5 m |
| Distance from the oil spill extreme | 11.23 km |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lupidi, A.; Staglianò, D.; Martorella, M.; Berizzi, F. Fast Detection of Oil Spills and Ships Using SAR Images. Remote Sens. 2017, 9, 230. https://doi.org/10.3390/rs9030230
Lupidi A, Staglianò D, Martorella M, Berizzi F. Fast Detection of Oil Spills and Ships Using SAR Images. Remote Sensing. 2017; 9(3):230. https://doi.org/10.3390/rs9030230
Chicago/Turabian StyleLupidi, Alberto, Daniele Staglianò, Marco Martorella, and Fabrizio Berizzi. 2017. "Fast Detection of Oil Spills and Ships Using SAR Images" Remote Sensing 9, no. 3: 230. https://doi.org/10.3390/rs9030230