
UAV-Based Optical Granulometry as Tool for Detecting Changes in Structure of Flood Depositions



Abstract
:
1. Introduction
2. Materials and Methods
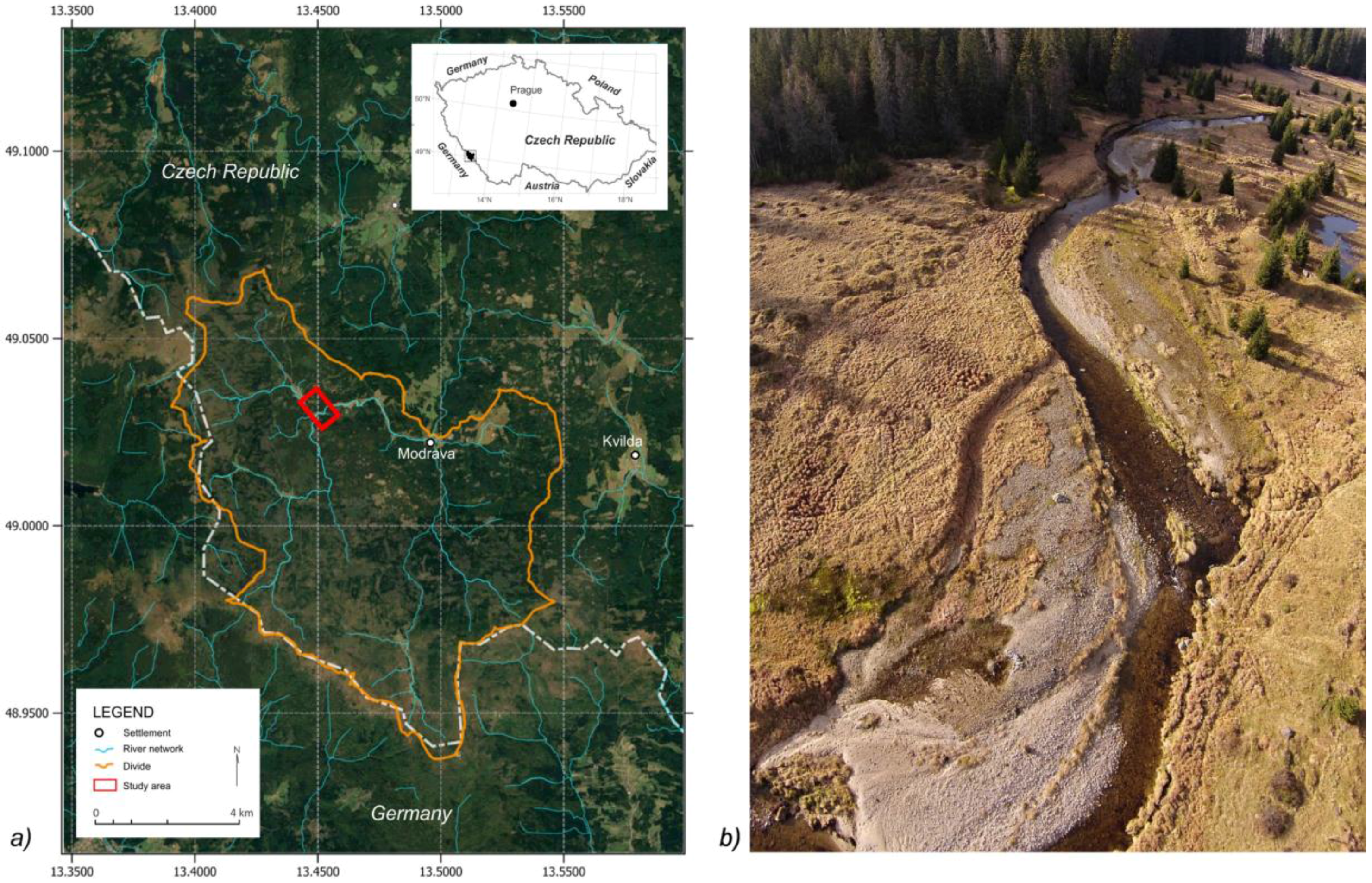
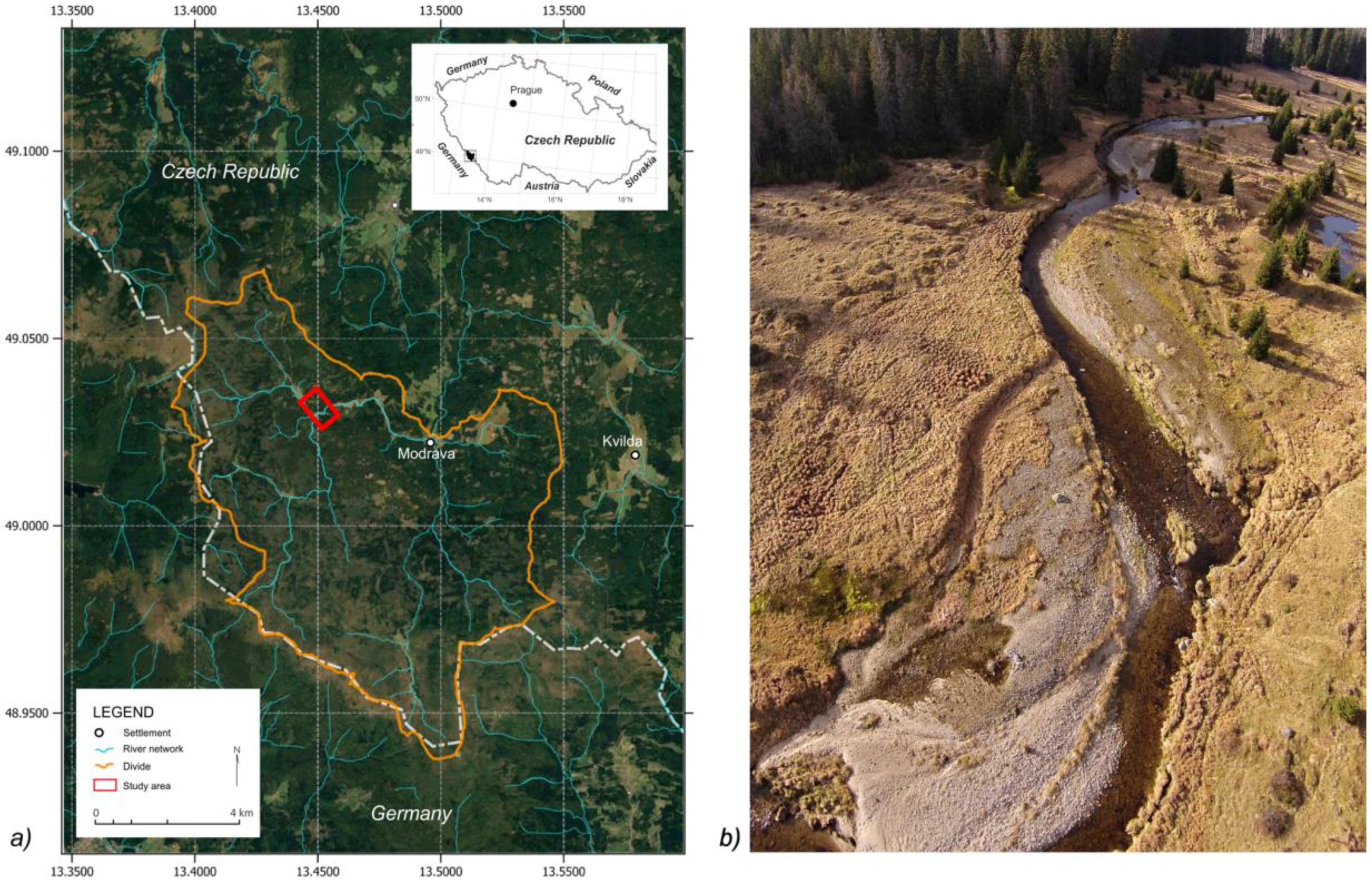
2.1. Study Area
2.2. Digital Optical Granulometry
2.3. UAV Photogrammetry
2.4. Application in the Study Area
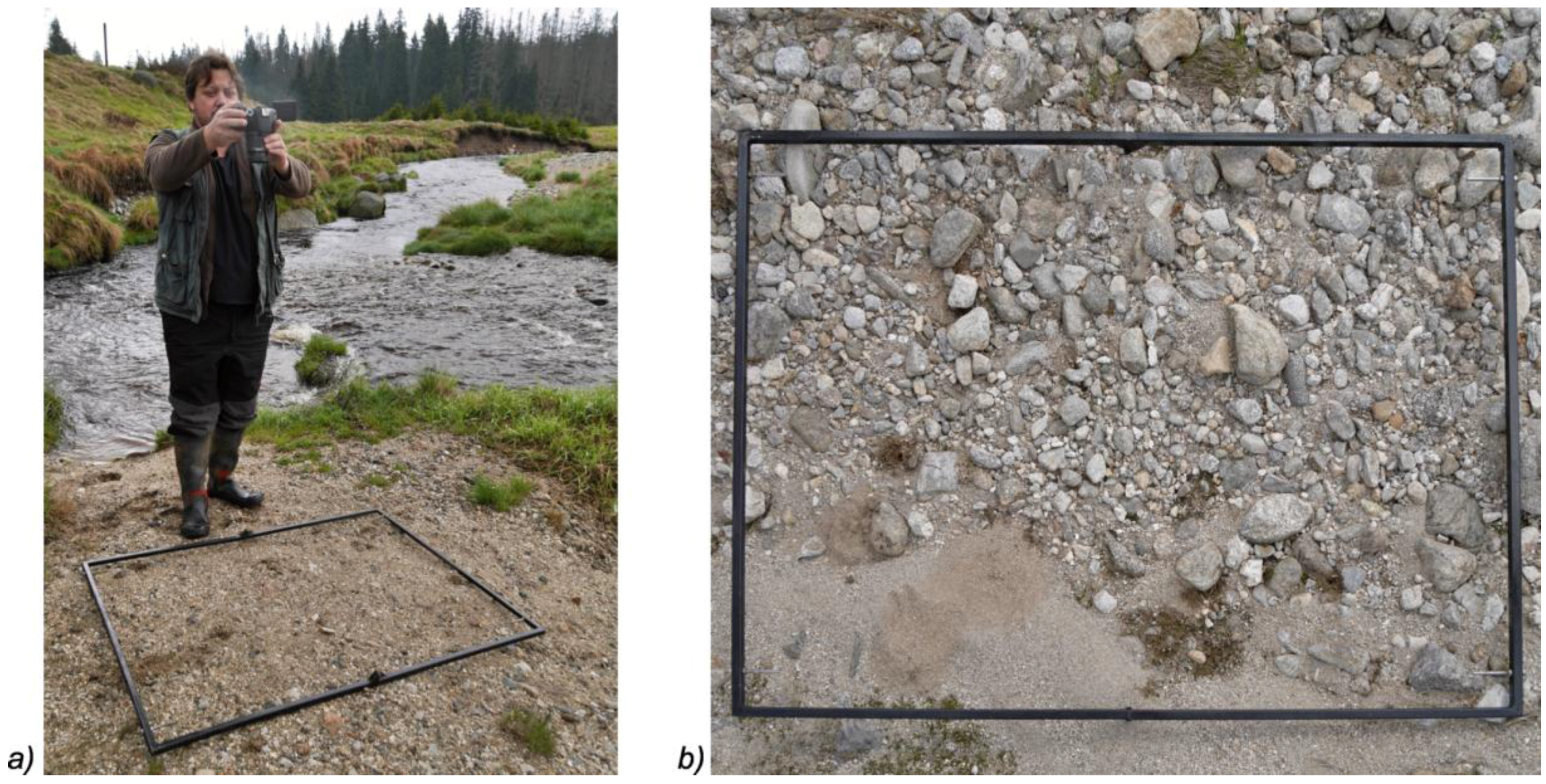
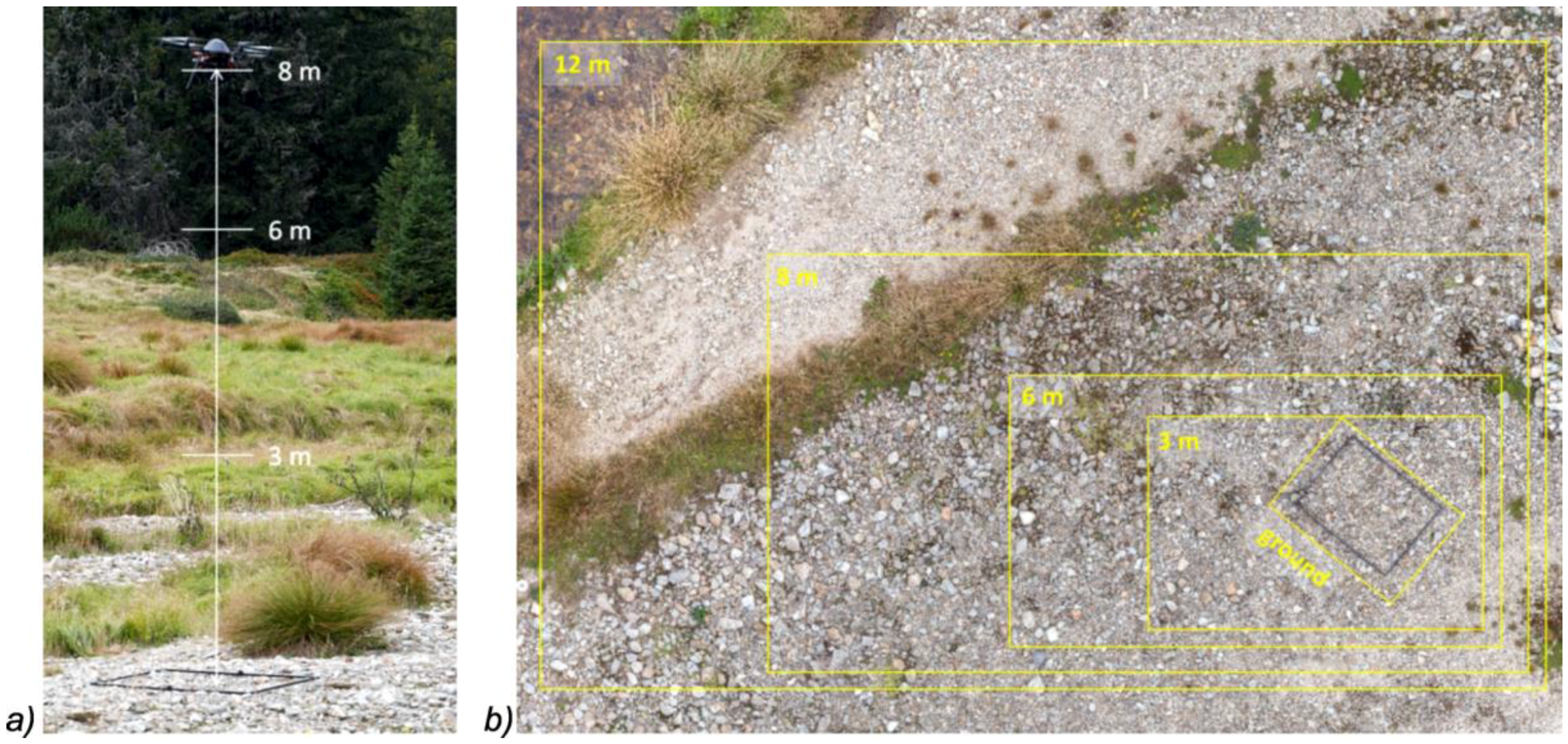
2.4.1. Design of Experiment and Imaging Campaign
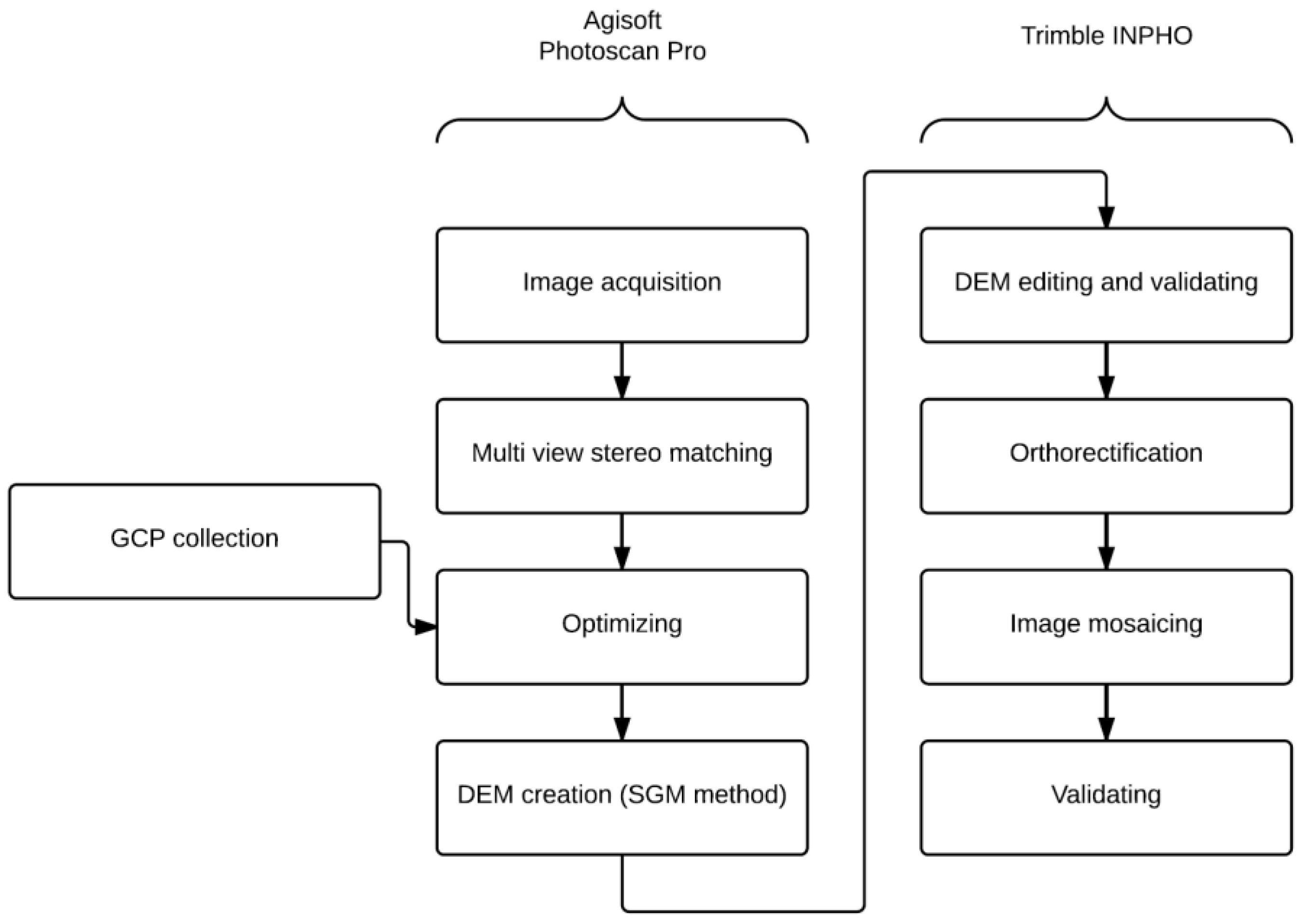
2.4.2. Photogrammetric Processing
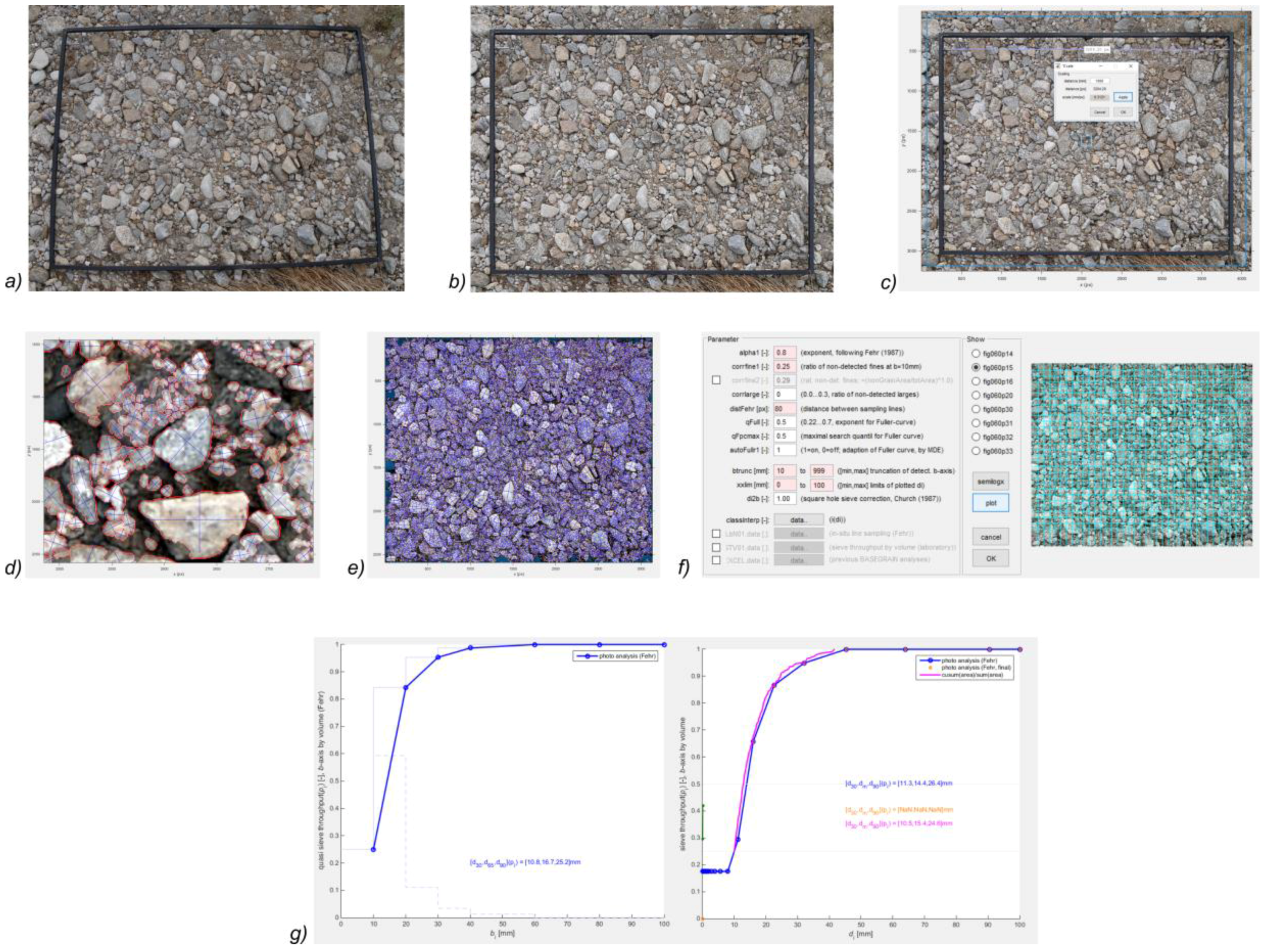
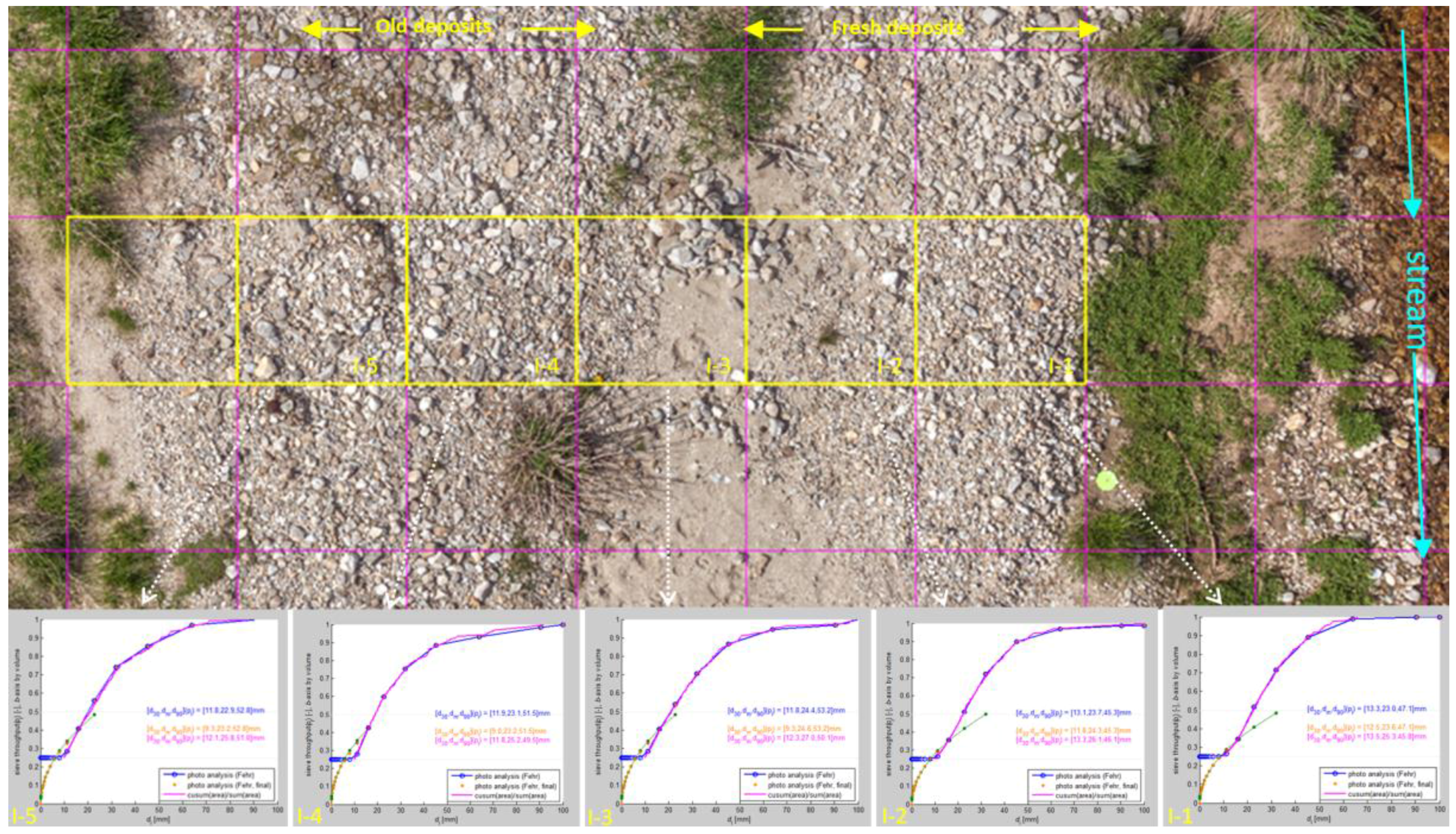
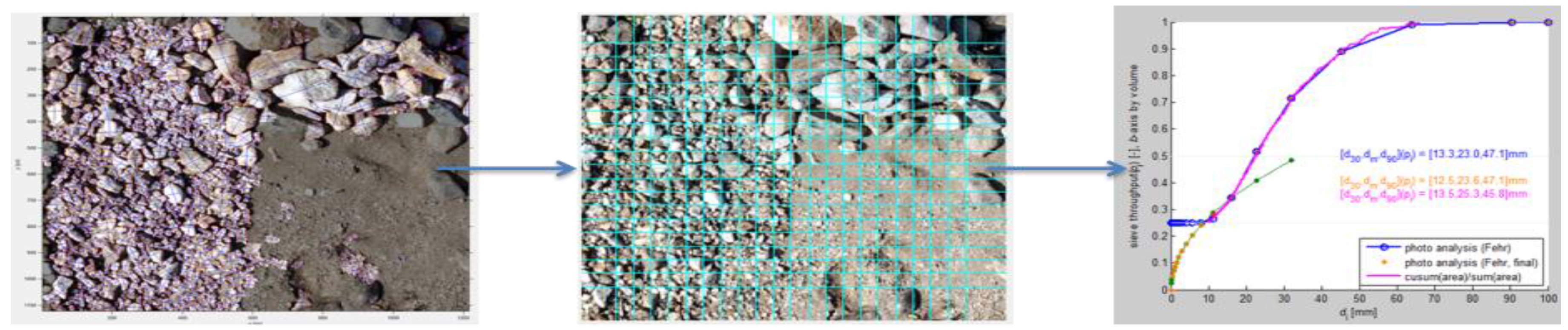
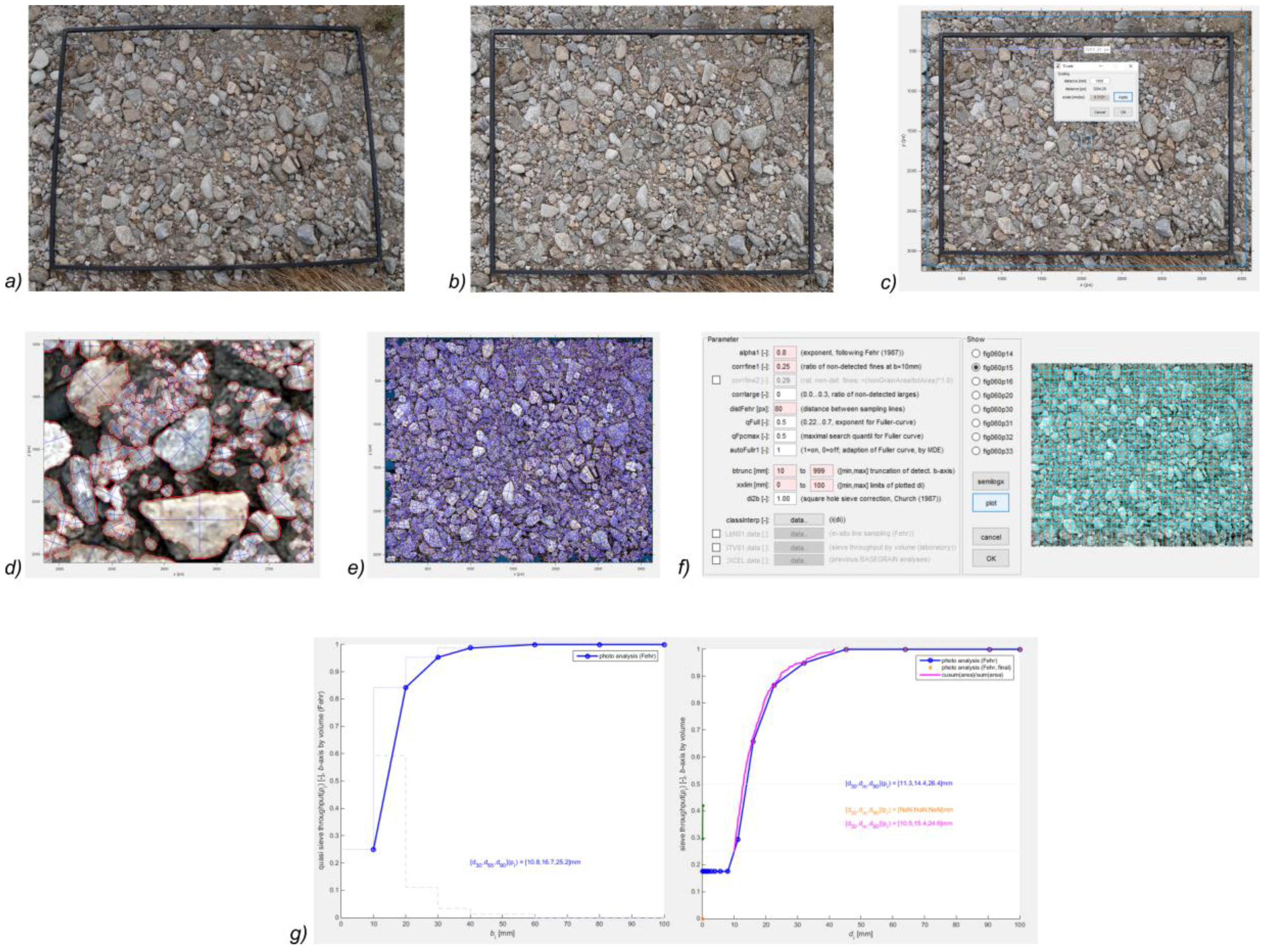
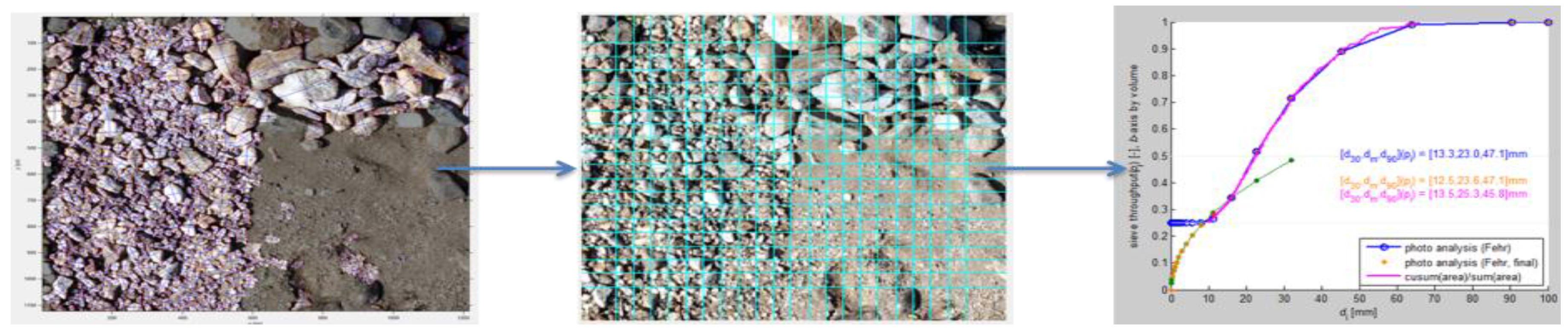
2.4.3. Digital Granulometric Analysis
3. Results
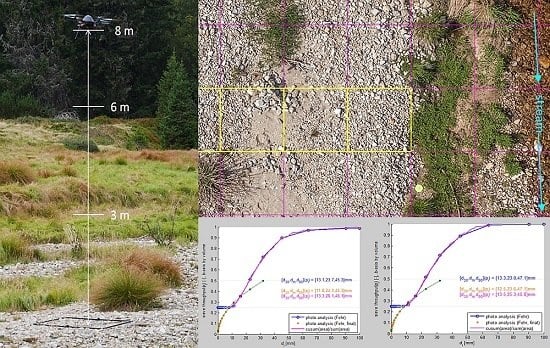
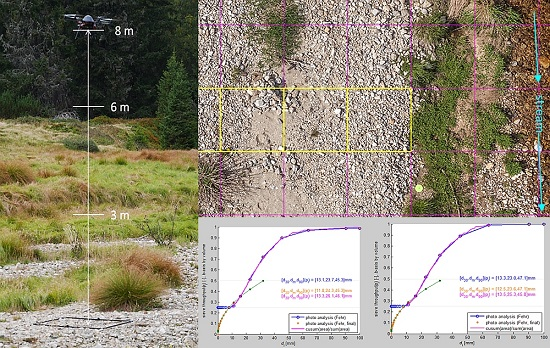
3.1. Determining the Optimum Parameters of UAV Imaging
3.2. Grain Size Distribution across the Point Bar
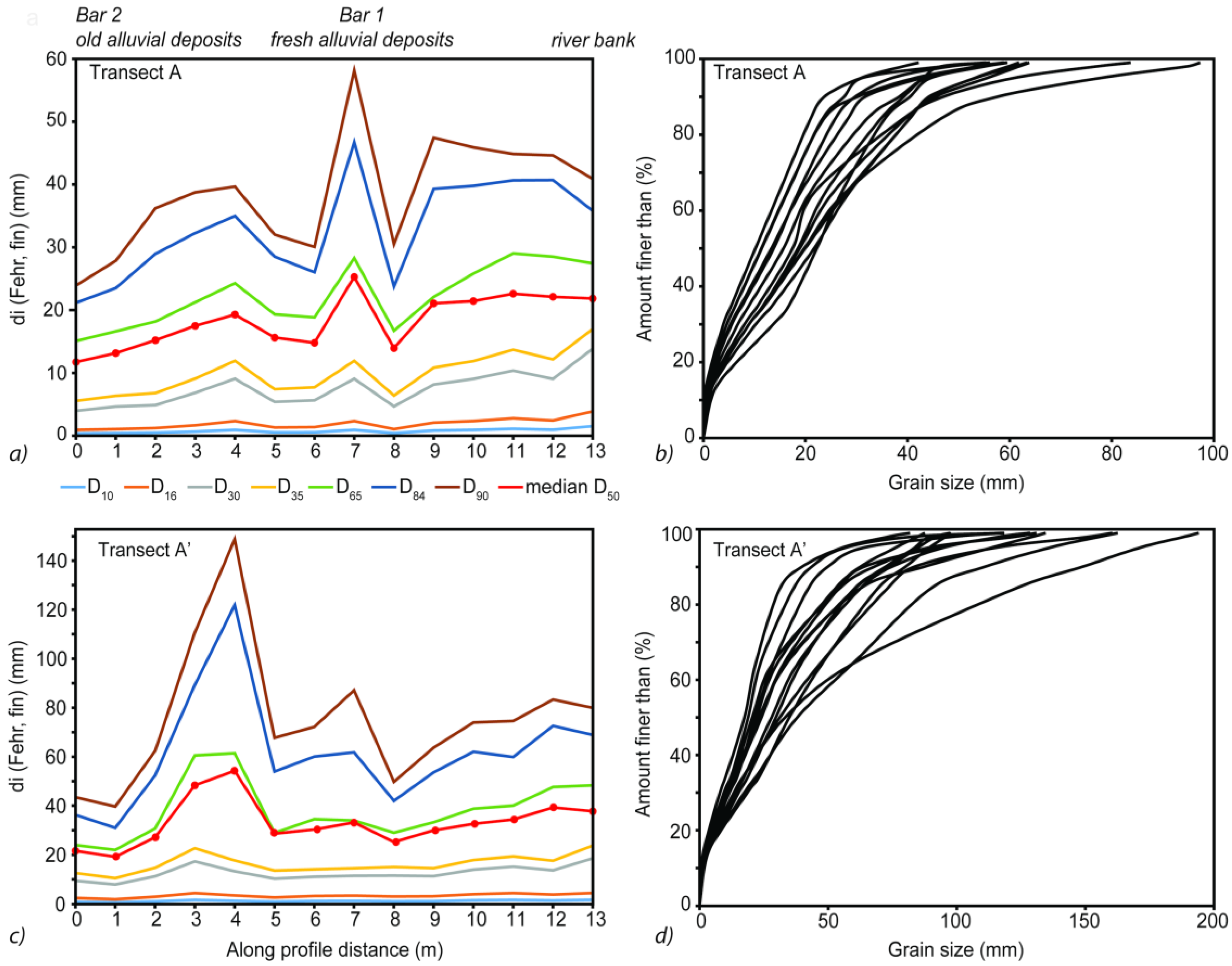
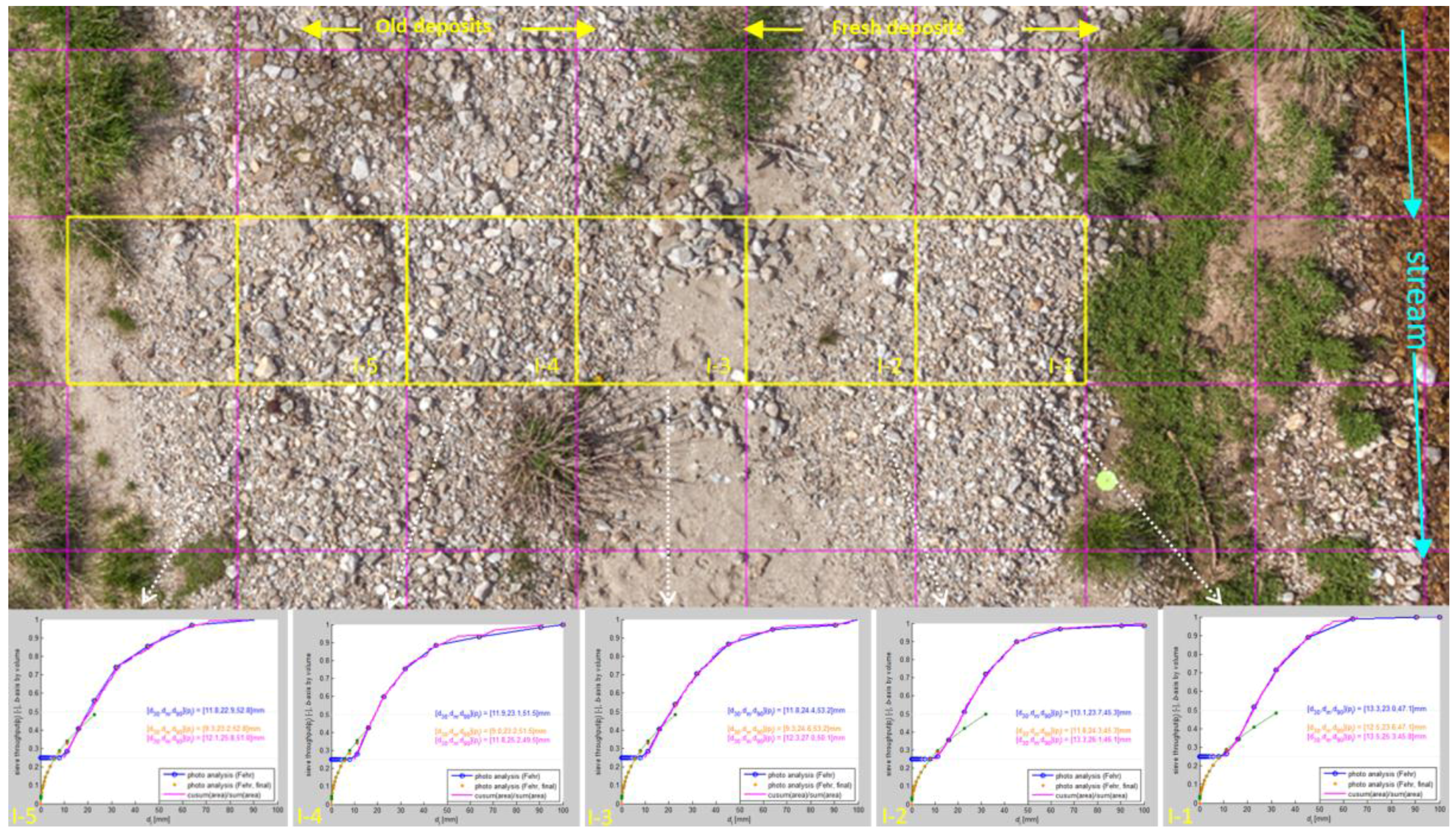
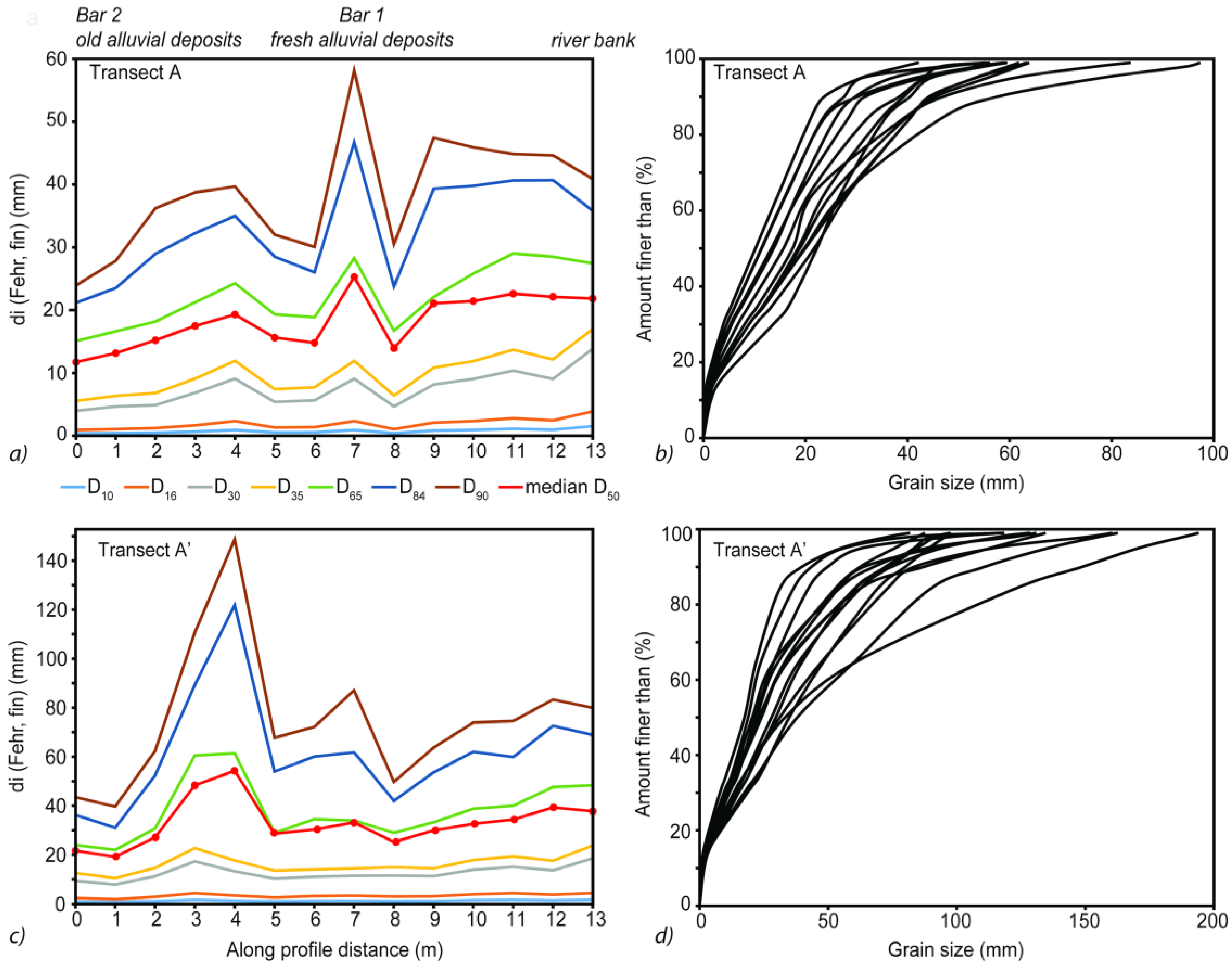
3.2.1. Distribution of Grain Size Parameters over Transects A and A’
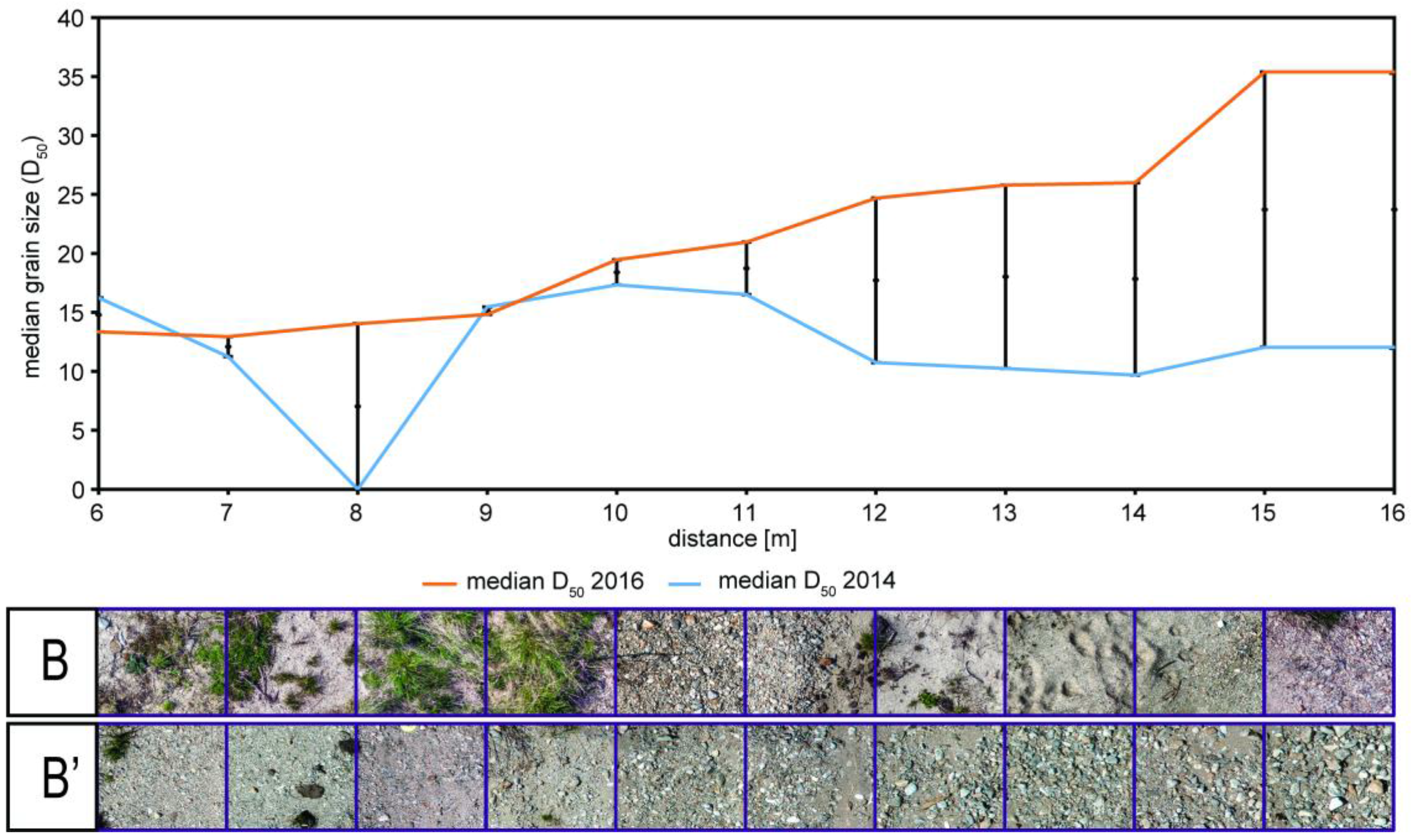
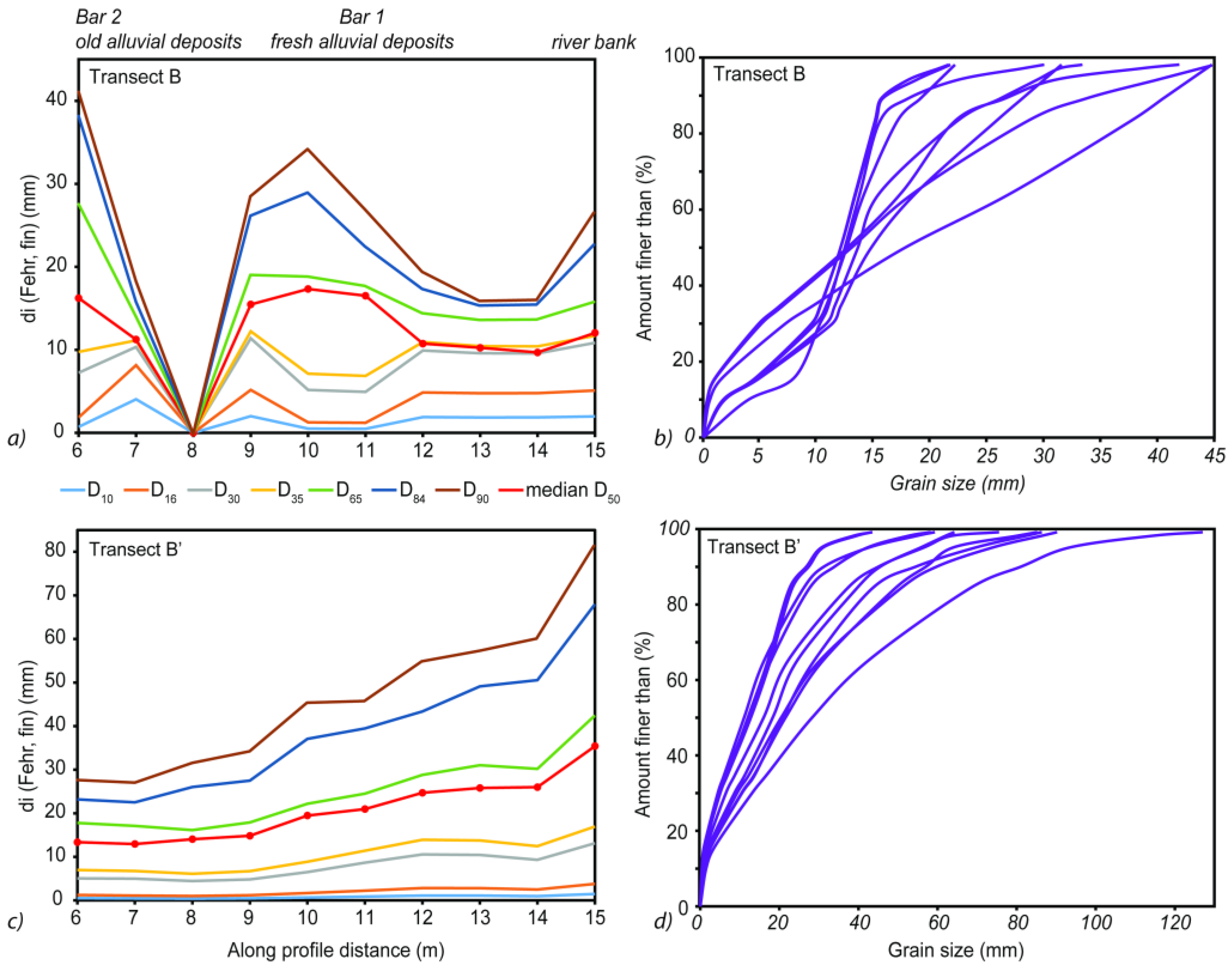
3.2.2. Distribution of Grain Size Parameters over Transects B and B’
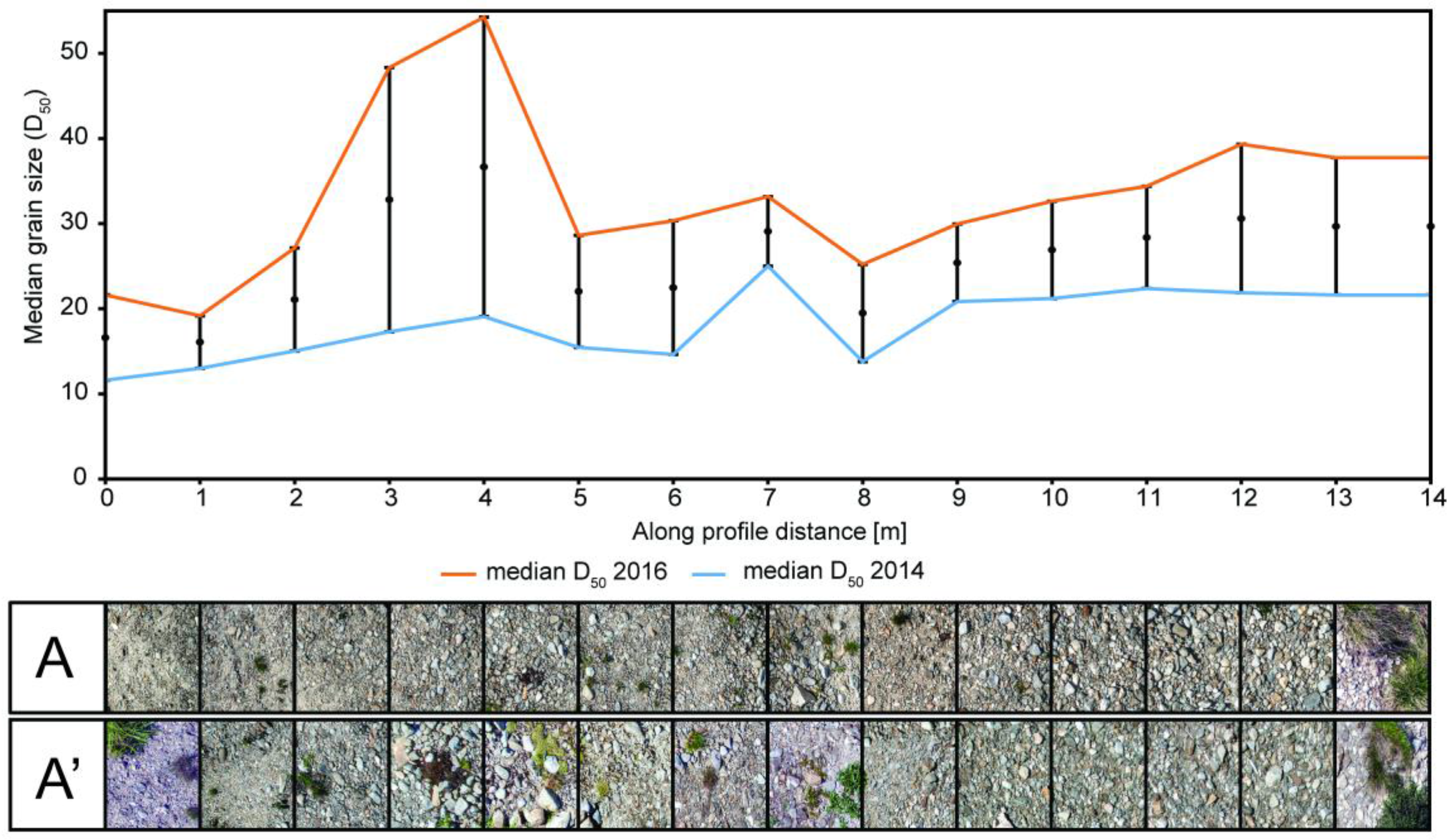
3.3. Multitemporal Changes in Grain Size Distribution over the Point Bar
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bunte, K.; Abt, S.R. Sampling Surface and Subsurface Particle-Size Distributions in Wadable Gravel-and Cobble-Bed Streams for Analyses in Sediment Transport, Hydraulics, and Streambed Monitoring; Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2001.
- Church, M.A.; McLean, D.G.; Wolcott, J.F. River Bed Gravels: Sampling and Analysis. Sediment Transport in Gravel-Bed Rivers; John Wiley and Sons: New York, NY, USA, 1987; pp. 43–88. [Google Scholar]
- Folk, R.L. A review of grain-size parameters. Sedimentology 1966, 6, 73–93. [Google Scholar] [CrossRef]
- Graham, D.J.; Reid, I.; Rice, S.P. Automated Sizing of Coarse-Grained Sediments: Image-Processing Procedures. Math. Geol. 2005, 37, 1–28. [Google Scholar] [CrossRef]
- Butler, J.B.; Lane, S.N.; Chandler, J.H. Automated extraction of grain-size data from gravel surfaces using digital image processing. J. Hydraul. Res. 2001, 39, 519–529. [Google Scholar] [CrossRef]
- Miřijovský, J.; Langhammer, J. Multitemporal Monitoring of the Morphodynamics of a Mid-Mountain Stream Using UAS Photogrammetry. Remote Sens. 2015, 7, 8586–8609. [Google Scholar] [CrossRef]
- Čurda, J.; Janský, B.; Kocum, J. The effects of physical-geographic factors on flood episodes extremity in the Vydra River basin. Vliv Fyzick. Fakt. Extrem. Povodní Povodí Vydry 2011, 116, 335–353. [Google Scholar]
- Langhammer, J.; Su, Y.; Bernsteinová, J. Runoff Response to Climate Warming and Forest Disturbance in a Mid-Mountain Basin. Water 2015, 7, 3320–3342. [Google Scholar] [CrossRef]
- Křenová, Z.; Hruška, J. Proper zonation—An essential tool for the future conservation of the Šumava National Park. Eur. J. Environ. Sci. 2012, 2, 62–72. [Google Scholar]
- Millidine, K.J.; Malcolm, I.A.; Gibbins, C.N. The Potential of Digital Photogrammetry for Characterising Streambed Grain-Size Distributions in Fish Habitat Studies: A Feasibility and Limitations Report; Marine Scotland—Science, Freshwater Laboratory: Pitlochry, Scotland, 2011. [Google Scholar]
- Graham, D.J.; Rollet, A.-J.; Rice, S.P.; Piégay, H. Conversions of Surface Grain-Size Samples Collected and Recorded Using Different Procedures. J. Hydraul. Eng. 2012, 138, 839–849. [Google Scholar] [CrossRef] [Green Version]
- Ibbeken, H.; Schleyer, R. Photo-sieving: A method for grain-size analysis of coarse-grained, unconsolidated bedding surfaces. Earth Surf. Process. Landf. 1986, 11, 59–77. [Google Scholar] [CrossRef]
- Detert, M.; Weitbrecht, V. Automatic object detection to analyze the geometry of gravel grains—A free stand-alone tool. In River Flow; CRC Press: Boca Raton, FL, USA, 2012; pp. 595–600. [Google Scholar]
- Lejot, J.; Delacourt, C.; Piégay, H.; Fournier, T.; Trémélo, M.-L.; Allemand, P. Very high spatial resolution imagery for channel bathymetry and topography from an unmanned mapping controlled platform. Earth Surf. Process. Landf. 2007, 32, 1705–1725. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Eltner, A.; Schneider, D. Analysis of Different Methods for 3D Reconstruction of Natural Surfaces from Parallel-Axes UAV Images. Photogramm. Rec. 2015, 30, 279–299. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Remondino, F.; del Pizzo, S.; Kersten, T.P.; Troisi, S. Low-cost and open-source solutions for automated image orientation—A critical overview. In Euro-Mediterranean Conference; Springer: Berlin/Heidelberg, Germany, 2012; pp. 40–54. [Google Scholar]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Hirschmuller, H. Stereo Processing by Semiglobal Matching and Mutual Information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Hirschmuller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2005), San Diego, CA, USA, 20–25 June 2005; Volume 2, pp. 807–814.
- Langhammer, J.; Česák, J. Applicability of a Nu-Support Vector Regression Model for the Completion of Missing Data in Hydrological Time Series. Water 2016, 8, 560. [Google Scholar] [CrossRef]
- Fehr, R. Geschiebeanalysen in Gebirgsflüssen: Umrechnung und Vergleich von verschiedenen Analyseverfahren; Versuchsanst. für Wasserbau, Hydrologie u. Glaziologie: Zurich, Switzerland, 1987. [Google Scholar]
- Sime, L.C.; Ferguson, R.I. Information on grain sizes in Gravel-Bed Rivers by automated image analysis. J. Sediment. Res. 2003, 73, 630–636. [Google Scholar] [CrossRef]
- International Organization for Standardization. CEN 14688-1: 2002/A1: 2013: Geotechnical Investigation and Testing—Identification and Classification of Soil—Part 1: Identification and Description—Amendment 1 2013; International Organization for Standardization: Geneva, Switzerland, 2002. [Google Scholar]
- Pix4D. Ground Sampling Distance Calculator. Available online: https://support.pix4d.com/hc/en-us/articles/202560249-TOOLS-GSD-Calculator#gsc.tab=0 (accessed on 15 January 2017).
- Rieke, M.; Foerster, T.; Geipel, J.; Prinz, T. High-precision positioning and real-time data processing of UAV-systems. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: London, UK, 2013. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | 2014 | 2016 |
|---|---|---|
| Imaging date | 23 May 2014 | 23 June 2016 |
| Number of images | 86 | 185 |
| Average flying altitude (m) | 7.9 | 4.4 |
| Ground sample distance (mm) | 1.7 | 0.96 |
| Number of ground control points | 6 | 5 |
| Image coordinate error (pix) | 0.3 | 0.1 |
| RMSEZ (m) | 0.015 | 0.021 |
| Percentiles BaseGrain | Transect A (2014) | Transect A’ (2016) | ||||||
|---|---|---|---|---|---|---|---|---|
| Min | Max | Mean | Range | Min | Max | Mean | Range | |
| D10 | 0.35 | 1.50 | 0.74 | 1.15 | 0.78 | 1.77 | 1.36 | 0.99 |
| D16 | 0.90 | 3.83 | 1.88 | 2.93 | 2.00 | 4.54 | 3.47 | 2.54 |
| D30 | 3.92 | 13.69 | 7.38 | 9.78 | 7.86 | 18.56 | 12.57 | 10.70 |
| D35 | 5.49 | 16.81 | 9.80 | 11.32 | 10.49 | 23.78 | 16.31 | 13.29 |
| D65 | 14.92 | 28.71 | 22.01 | 13.79 | 22.03 | 61.42 | 38.09 | 39.39 |
| D84 | 20.93 | 46.25 | 32.66 | 25.32 | 31.02 | 121.86 | 61.85 | 90.85 |
| D90 | 23.67 | 57.56 | 38.22 | 33.90 | 39.70 | 148.70 | 75.52 | 108.99 |
| median grain size D50 | 11.60 | 25.01 | 18.06 | 13.41 | 19.18 | 54.26 | 33.00 | 35.08 |
| Percentiles BaseGrain | Transect B (2014) | Transect B’ (2016) | ||||||
|---|---|---|---|---|---|---|---|---|
| Min | Max | Mean | Range | Min | Max | Mean | Range | |
| D10 | 0.48 | 4.05 | 1.71 | 3.56 | 0.40 | 1.48 | 0.80 | 1.08 |
| D16 | 1.21 | 8.15 | 4.13 | 6.94 | 1.00 | 3.78 | 2.03 | 2.78 |
| D30 | 4.93 | 11.38 | 8.78 | 6.44 | 4.45 | 13.11 | 7.78 | 8.67 |
| D35 | 6.86 | 12.23 | 10.07 | 5.37 | 6.11 | 16.95 | 10.39 | 10.83 |
| D65 | 13.51 | 27.23 | 17.03 | 13.71 | 16.13 | 42.44 | 24.80 | 26.31 |
| D84 | 15.23 | 37.66 | 22.24 | 22.44 | 22.50 | 67.97 | 38.67 | 45.47 |
| D90 | 15.77 | 40.53 | 24.92 | 24.76 | 26.92 | 81.41 | 46.47 | 54.49 |
| median grain size D50 | 9.69 | 17.33 | 13.28 | 7.64 | 12.94 | 35.40 | 20.74 | 22.46 |
| Camera and lens | Sensor Resolution (Mpx) * | Sensor Size (mm) * | 6 m GSD (mm) | 8 m GSD/Scene Size | 12 m GSD/Scene Size | 16 m GSD/Scene Size |
|---|---|---|---|---|---|---|
| Canon EOS 500D, 22 mm lens | 15.5 | 22.3 × 17.9 | 1.33 | 1.77 | 2.66 | 3.54 |
| Nikon D3300, 22 mm lens | 24.2 | 23.5 × 15.6 | 1.11 | 1.41 | 2.12 | 2.83 |
| Nikon D800E, 35 mm lens | 36.8 | 35.9 × 24 | 0.83 | 1.11 | 1.66 | 2.22 |
| Sony A7R II, 35 mm lens | 42.4 | 36 × 24 | 0.77 | 1.03 | 1.54 | 2.06 |
| Canon EOS 5DS, 35 mm lens | 50.6 | 36 × 24 | 0.71 | 0.95 | 1.42 | 1.89 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Langhammer, J.; Lendzioch, T.; Miřijovský, J.; Hartvich, F. UAV-Based Optical Granulometry as Tool for Detecting Changes in Structure of Flood Depositions. Remote Sens. 2017, 9, 240. https://doi.org/10.3390/rs9030240
Langhammer J, Lendzioch T, Miřijovský J, Hartvich F. UAV-Based Optical Granulometry as Tool for Detecting Changes in Structure of Flood Depositions. Remote Sensing. 2017; 9(3):240. https://doi.org/10.3390/rs9030240
Chicago/Turabian StyleLanghammer, Jakub, Theodora Lendzioch, Jakub Miřijovský, and Filip Hartvich. 2017. "UAV-Based Optical Granulometry as Tool for Detecting Changes in Structure of Flood Depositions" Remote Sensing 9, no. 3: 240. https://doi.org/10.3390/rs9030240
APA StyleLanghammer, J., Lendzioch, T., Miřijovský, J., & Hartvich, F. (2017). UAV-Based Optical Granulometry as Tool for Detecting Changes in Structure of Flood Depositions. Remote Sensing, 9(3), 240. https://doi.org/10.3390/rs9030240