1. Introduction
Hyperspectral sensors acquire nearly continuous spectral bands with hundreds of spectral channels to capture the diagnostic information of land-cover materials, opening new possibilities for remote sensing applications such as mineral exploration, precision agriculture, and disaster monitoring [
1,
2,
3]. As an unsupervised information extraction technique, clustering is a very useful tool for hyperspectral image (HSI) interpretation. When labeled samples are unavailable or difficult to acquire, clustering can be an effective alternative [
4]. Clustering can be defined as a partition process, which involves grouping similar pixels while separating dissimilar ones. However, due to the complex nonlinear structure and large spectral variability, clustering HSIs is a very challenging task.
The traditional clustering methods that are commonly applied to HSIs, such as
k-means [
5] and fuzzy
c-means (FCM) [
6], attempt to segment pixels using only the spectral information. However, because of their limited discriminative capability and weak adaptation to the nonlinear structure of HSIs, such methods often fail to achieve satisfactory results. In recent years, to address this issue, a number of spectral-spatial clustering methods have been developed, such as
S-
k-means [
7] and FCM-S1 [
8], which have been shown to be able to improve the performance of unsupervised clustering. In addition, supervised spectral-spatial segmentation methods, such as Markov random field (MRF)-based methods [
9] and graph-based methods [
10], have also been widely used in remote sensing data interpretation.
Subspace-based and sparse representation based approaches have recently drawn wide attention in the context of high-dimensional data analysis, due to their excellent performance. By modeling the data via low-dimensional manifolds, the inherent structure of the data can be better explored [
11,
12]. As a perfect combination of these two theories, the sparse subspace clustering (SSC) algorithm [
13,
14] has achieved great success in the computer vision field. By treating pixels from the same land-cover class that have different spectra as belonging to the same subspace, the SSC algorithm has also shown great potential in HSI clustering [
15,
16,
17], which is mainly due to its capacity to address the spectral variability problem. However, SSC interprets the HSIs only with the spectral information, and it ignores the rich spatial information contained in the images. As a result, the obtained performance is limited. In order to account for the spatial information contained in HSIs, SSC models incorporating spatial information have become very popular. In a recent study [
15], the spectral-spatial sparse subspace clustering (S
4C) algorithm was proposed to improve clustering performance by the use of a spectral weighting strategy to relieve the high correlation problem between hyperspectral pixels and a local averaging constraint to incorporate the spatial information contained in the eight-connected neighborhood. As an enhanced approach incorporating spatial information, the
–norm regularized sparse subspace clustering (L2-SSC) algorithm [
16] was developed to exploit the inherent spectral-spatial properties of HSIs in a more elaborate way, and can achieve a good effect.
One important consideration is that the aforementioned linear methods often have difficulty in coping with the inherently nonlinear structure of HSIs. In recent years, a number of methods have been proposed to deal with the linear inseparability problem in HSI data interpretation. Among these methods, kernel-based algorithms are one of the most commonly used methods. These approaches map the HSI from the original feature space to a much higher dimensional kernel feature space, in which the classes are assumed to be linearly separable. For example, Mercier and Lennon [
18] developed support vector machines for hyperspectral image classification with spectral-based kernels. Chen et al. [
19] explored kernel sparse representation for HSI classification. However, to the best of our knowledge, there are very few clustering methods that can deal with the nonlinearity problem. Very recently, Morsier et al. [
20] proposed a kernel-based low-rank and sparse representation algorithm to explore the nonlinearity of HSIs. However, this approach only utilizes the spectral information, without considering any spatial-contextual information.
In this paper, to address these issues, we introduce a novel kernel sparse subspace clustering algorithm with a spatial max pooling operation (KSSC-SMP) for hyperspectral remote sensing data interpretation, which is an extension of our previous conference work [
21]. The proposed method simultaneously explores the nonlinear structure and the inherent spectral-spatial attributes of HSIs. On the one hand, with the kernel strategy, we map the feature points from the original feature space to a much higher dimensional space to ensure that the linearly inseparable points are more separable. On the other hand, in order to fully exploit the discriminative spectral-spatial information of HSIs and the potential of the SSC model, the spatial max pooling operation is introduced to merge the obtained representation coefficients into new features which incorporate the spatial-contextual information, thereby improving the clustering performance and guaranteeing the spatial homogeneity of the final clustering result.
The rest of this paper is organized as follows.
Section 2 reviews the classical SSC model.
Section 3 introduces the proposed KSSC-SMP algorithm in detail.
Section 4 describes the experimental results.
Section 5 analyzes the experimental results.
Section 6 draws the conclusions and points out the future research lines.
2. Sparse Subspace Clustering (SSC)
In this section, we briefly review the SSC algorithm. By using the HSI dataset itself as the representation dictionary, the attributes of each data point can be comprehensively exploited within the SSC framework [
13]. For an HSI with a size of
, all the pixels can be considered as being selected from a union of
affine subspaces
of dimensions
in the full space
with
, where
denotes the height of the image,
represents the width of the image, and
stands for the number of spectral channels. By treating each pixel as a column vector, the HSI cube can be transformed into a 2-D matrix
. Then, with this 2-D matrix being utilized as the representation dictionary, the sparse optimization problem can be modeled as follows:
where
denotes the representation coefficient matrix,
stands for the representation error matrix, and
is a vector whose elements are all ones. The constraint
is used to eliminate the trivial solution of each pixel being represented as a linear combination of itself [
13]. The condition
means that it adopts the affine subspace model, which is a special linear subspace model [
13,
15]. As the
-norm optimization problem is non-deterministic polynomial hard (NP-hard), the relaxed
-norm is usually adopted [
22]:
The optimization problem in Equation (2) can be effectively solved by the alternating direction method of multipliers (ADMM) algorithm [
23,
24,
25]. We then construct the similarity graph using the sparse coefficient matrix [
15,
16,
17]. Meanwhile, the symmetric form is adopted to enhance the connectivity of the graph:
where
denotes the similarity graph whose element
represents the similarity between pixel
and pixel
. The spectral clustering algorithm is then applied to the similarity graph to obtain the final clustering result [
26,
27,
28].
3. Kernel Sparse Subspace Clustering Algorithm with a Spatial Max Pooling Operation (KSSC-SMP)
In this section, we introduce the newly developed KSSC-SMP algorithm. The proposed approach attempts to fully exploit both the nonlinear structure of HSIs and the potential of the SSC model to achieve more accurate clustering results. Considering the complex nonlinear structure of HSIs, we map the feature points to a much higher dimensional kernel space with the kernel strategy to make them linearly separable. In this way, a more accurate representation coefficient matrix can be obtained. In addition, the spatial max pooling operation is introduced to yield new features with these coefficients by incorporating the spatial-contextual information.
3.1. Kernel Sparse Subspace Clustering Algorithm (KSSC)
The kernel sparse subspace clustering (KSSC) algorithm extends the SSC algorithm to nonlinear manifolds by the use of a kernel strategy to map the feature points from the original space to a much higher dimensional space, in order to make them linearly separable [
29]. The kernel mapping directly takes the signal in the kernel space as a feature [
30] and represents each signal with the others from its own subspace, as in SSC. The sparse representation coefficient matrix can then be obtained by solving the following optimization problem:
where
represents a tradeoff between the data fidelity term and the sparsity term, and
is a mapping function from the input space to the reproducing kernel space
[
30]. We let
denote a positive semi-definite kernel Gram matrix whose elements are computed as follows:
where
is the “spectral pixel” at location
in HSI
and
represents the kernel function, which measures the similarity of two arguments denoted as a pair of pixels. Commonly used kernels include the radial basis function (RBF) kernel
and the polynomial kernel
, where
,
, and
are the parameters of the kernel functions. In this paper, the RBF kernel is adopted. As the feature space of the RBF kernel has an infinite number of dimensions, and its value decreases with distance between (0, 1), it can be readily interpreted as a similarity measure [
30].
3.2. Incorporating Spatial Information with the Spatial Max Pooling Operation
Through sparse representation, the coefficients can reveal the underlying cluster structure and can be directly utilized as features. However, when only using spectral information, a single representation coefficient vector of the target pixel can only provide limited discriminative information [
31,
32]. Based on the fact that pixels within a local patch (where the center pixel is the target pixel to be processed) have a high probability of being associated with the same thematic class, the sparse representation coefficients of these pixels are also expected to be similar. Therefore, the spatial pooling operation can be considered a reasonable way to merge these similar sparse representation coefficient vectors and yield a new feature vector with better discriminative ability, which is an approach that has been widely used in the literature [
33,
34].
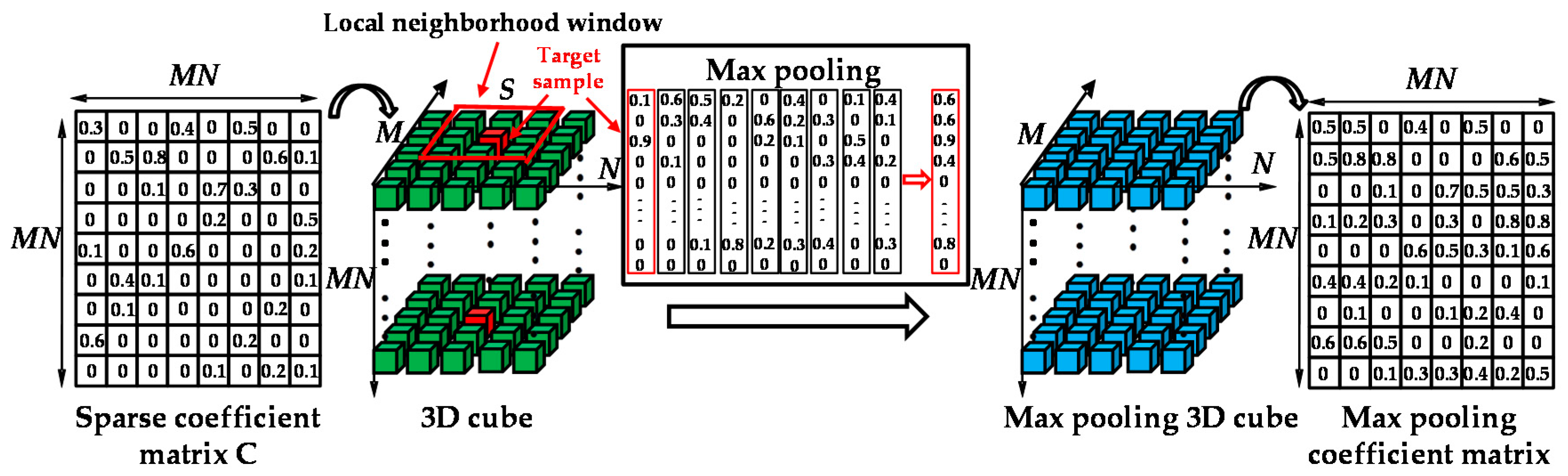
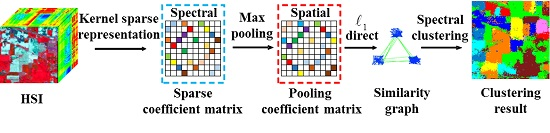
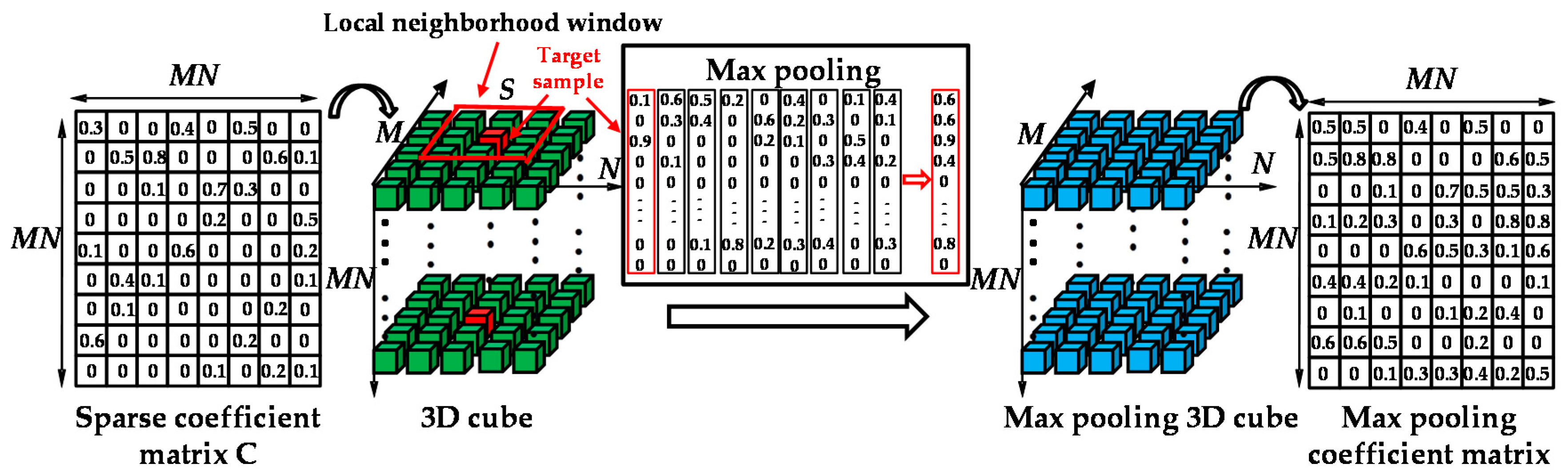
At this point, considering the mechanism adopted by SSC (which pays more attention to larger coefficients and tends to highlight their role), the spatial max pooling operation is adopted to merge these sparse coefficient vectors into a new pooling vector, which suppresses the small elements and preserves the large ones. This is because the larger the representation coefficients, the more similar to the target pixel the corresponding representation atoms are, and the greater the contribution they make to the sparse representation of the target pixel. In this process, since all the representation coefficients within the local patch are simultaneously taken into consideration to generate a new representation coefficient vector, the spatial-contextual information can be naturally incorporated. Moreover, it should be noted that the spatial max pooling operation is performed in the representation dimension, not directly on the pixel values.
Firstly, the 2-D sparse coefficient matrix
is reshaped into a 3-D cube
along rows, which can be seen as a “coefficient hyperspectral cube”. We then consider a local neighborhood window of size
for each representation coefficient vector, with the currently processed one as the center. Following this, the max pooling operation is performed on the local neighborhood window to select the local largest coefficient value of each band to act as one element of the newly generated coefficient vector for the target pixel. In this way, the more meaningful and discriminative information among the local neighborhood is extracted by the newly generated sparse representation coefficient vector, and the spatial-contextual information is naturally incorporated and fused in the max pooling process to generate the new spectral-spatial features. Finally, the obtained coefficient features are utilized to cluster the HSI. The process of spatial max pooling is illustrated in
Figure 1.
3.3. The KSSC-SMP Algorithm
In order to further improve the clustering performance, we combine the two aforementioned schemes into a unified framework to obtain the KSSC-SMP algorithm, which can simultaneously deal with the complex nonlinear structure and utilize the spectral-spatial attributes of HSIs. The KSSC-SMP algorithm can be summarized as shown in Algorithm 1.
| Algorithm 1. The kernel sparse subspace clustering algorithm with a spatial max pooling operation (KSSC-SMP) for hyperspectral remote sensing imagery |
Input:- 1)
A 2-D matrix of the HSI containing a set of points , in a union of affine subspaces ; - 2)
Parameters, including the cluster number , the regulation parameter , the kernel parameter , and the window size of the spatial max pooling operation.
Main algorithm:- 1)
Construct the kernel sparse representation optimization model (Equation (4)) and solve it to obtain the kernel sparse representation coefficient matrix using ADMM; - 2)
Conduct the spatial max pooling operation on to obtain the max pooling coefficient matrix , as shown in Figure 1; - 3)
Construct the similarity graph with the max pooling coefficient matrix; - 4)
Apply spectral clustering to the similarity graph to obtain the final clustering results;
Output:
A 2-D matrix which records the labels of the clustering result of the HSI. |
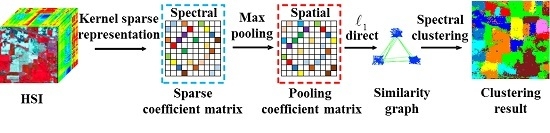
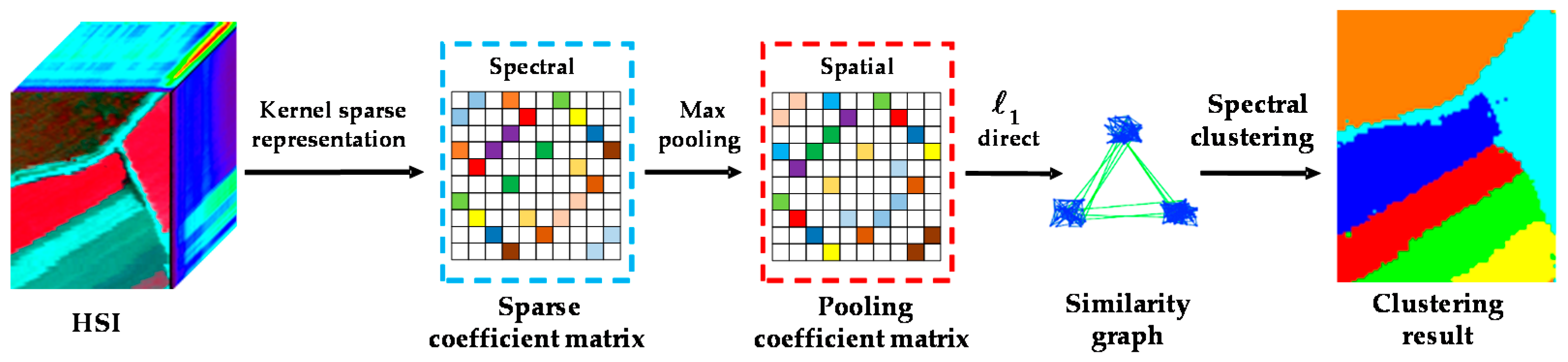
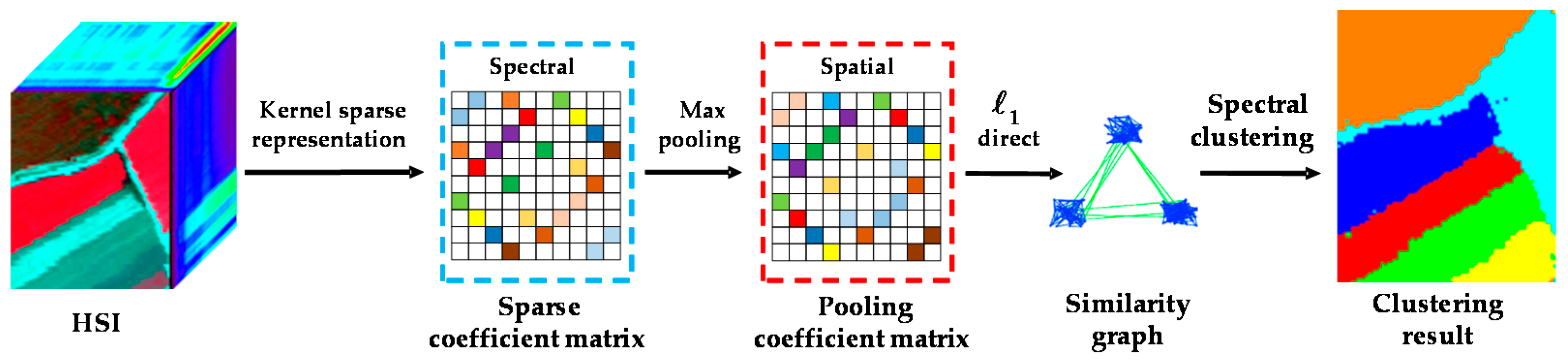
The flowchart of the proposed KSSC-SMP algorithm is given in
Figure 2.
4. Experimental Results
In order to evaluate the effectiveness of the proposed KSSC-SMP algorithm, the following state-of-the-art clustering approaches were implemented for comparative purposes: FCM-S1 [
8], clustering by fast search and find of density peaks (CFSFDP) [
35], SSC [
13], S
4C [
15], and L2-SSC [
16]. The number of clusters was determined by carefully observing the original image, and the parameters of each clustering method were carefully optimized through the well-known grid search strategy. The thematic information was manually determined to give a label for each cluster group through cross-referencing between the clustering result and the original image. To thoroughly evaluate the performance of each clustering method, both the visual cluster map and quantitative evaluation measures are provided, including the accuracy for each class (producer’s accuracy), the overall accuracy (OA), the kappa coefficient, the
z-value, and the running time.
The confusion matrix is defined as shown in
Table 1, which is a specific table layout that allows visualization of the performance of an algorithm. In the clustering field, it is commonly called a “matching matrix”. Based on the confusion matrix, the producer’s accuracy, OA, and kappa are calculated as follows.
where
refers to the producer’s accuracy of the
ith class. The
z-value measure is based on the contingency table, as shown in
Table 2, and it can be calculated as follows [
36].
where
represents the significance of the difference between the two clustering algorithms.
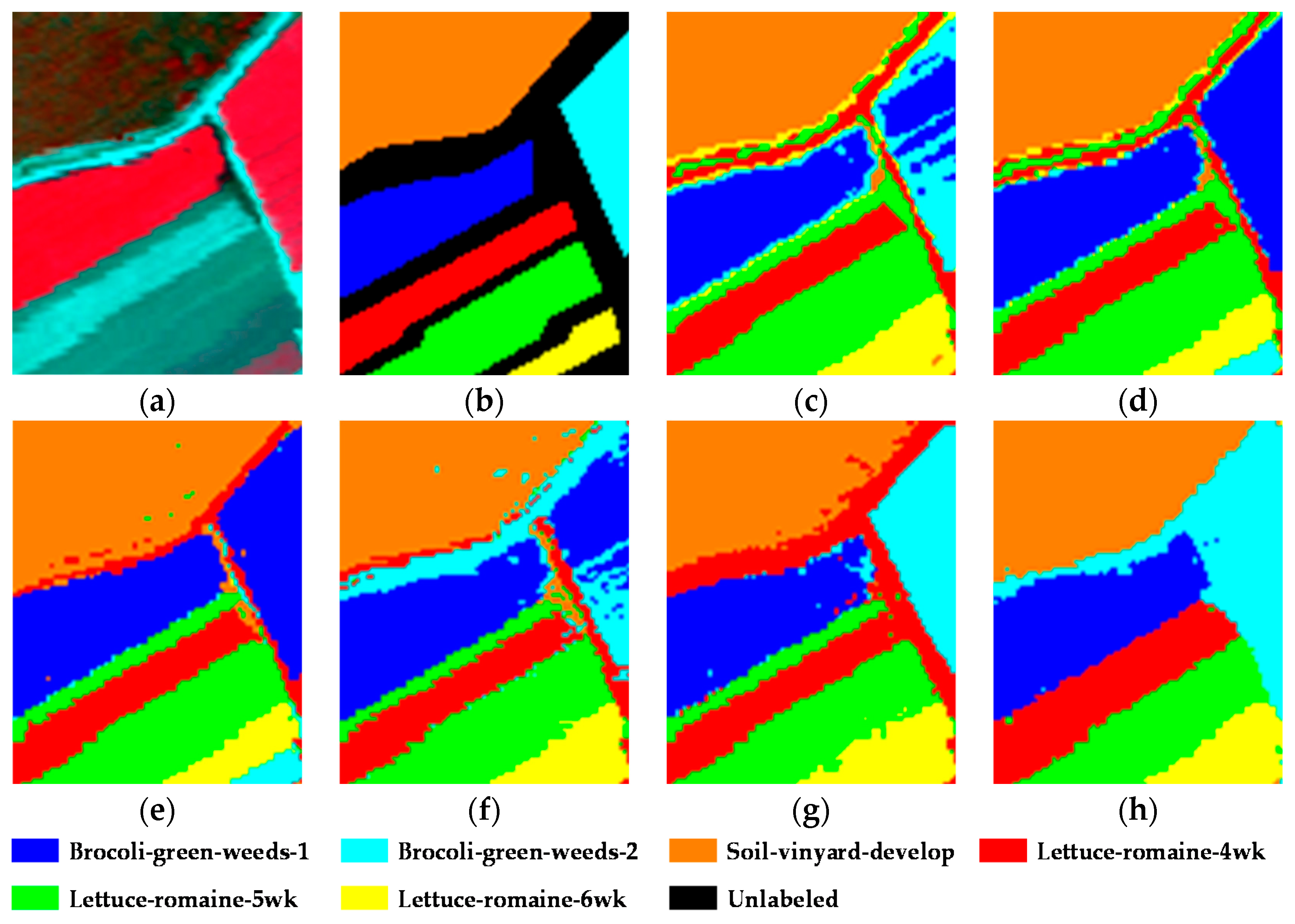
4.1. Experimental Results Obtained with the Salinas Image
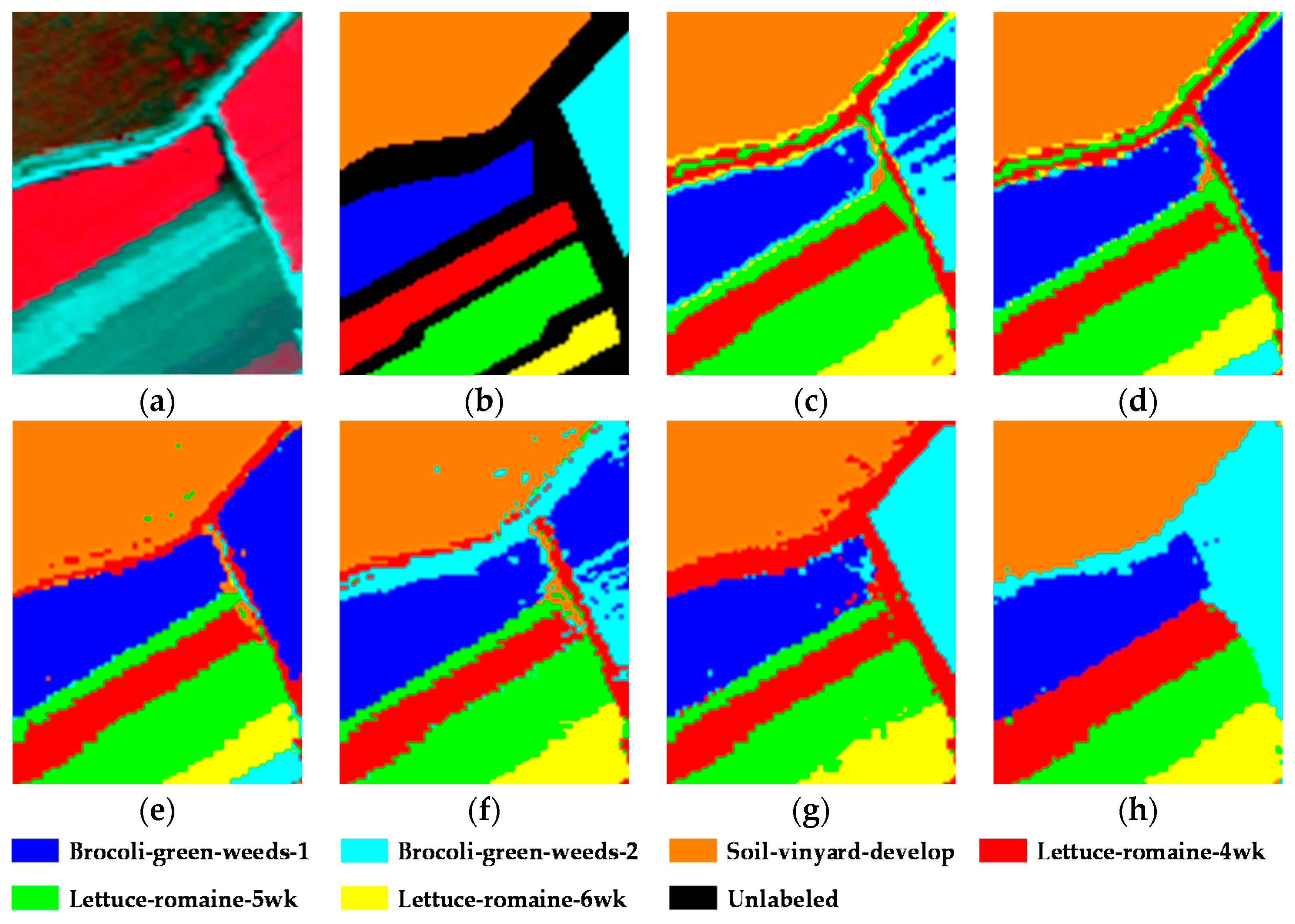
The first experiment was conducted on the well-known Salinas image. This scene was acquired by the Airborne Visible/Infrared Imaging Spectrometer (AVIRIS) sensor over the Salinas Valley, CA, USA, and consists of 512 × 217 pixels and 224 spectral reflectance bands in the wavelength range of 0.4–2.5 um. Twenty bands (108–112, 154–167, and 224) corresponding to water absorption and noisy bands were removed, leaving 204 bands for the experiment. In this scene, there are 16 different classes, which are mainly different kinds of vegetation. A typical area at a size of 100 × 80 was selected as the test data, containing six main land-cover classes: Brocoli-green-weeds-1 (Brocoli-1), Brocoli-green-weeds-2 (Brocoli-2), Soil-vinyard-develop (Soil), Lettuce-romaine-4wk (Lettuce-4wk), Lettuce-romaine-5wk (Lettuce-5wk), and Lettuce-romaine-6wk (Lettuce-6wk). To be consistent with all the unsupervised methods, all the samples in the ground truth were utilized as the test samples. The false-color composite image and the ground truth are shown in
Figure 3a,b, respectively. The parameters of each clustering algorithm in this experiment were set as shown in
Table 3.
The thematic maps obtained by each clustering algorithm with the Salinas image and the corresponding quantitative evaluation of the clustering precision are provided in
Figure 3 and
Table 4, respectively. In
Table 4, the best result in each row is shown in bold, with the second-best result underlined. From the figure and the table, it can be clearly observed that the proposed KSSC-SMP algorithm significantly improves the clustering performance and is superior to the other state-of-the-art clustering methods. KSSC-SMP achieves an optimal or sub-optimal precision for all the classes. As a result, it achieves the best OA of 99.89% and kappa of 0.9986.
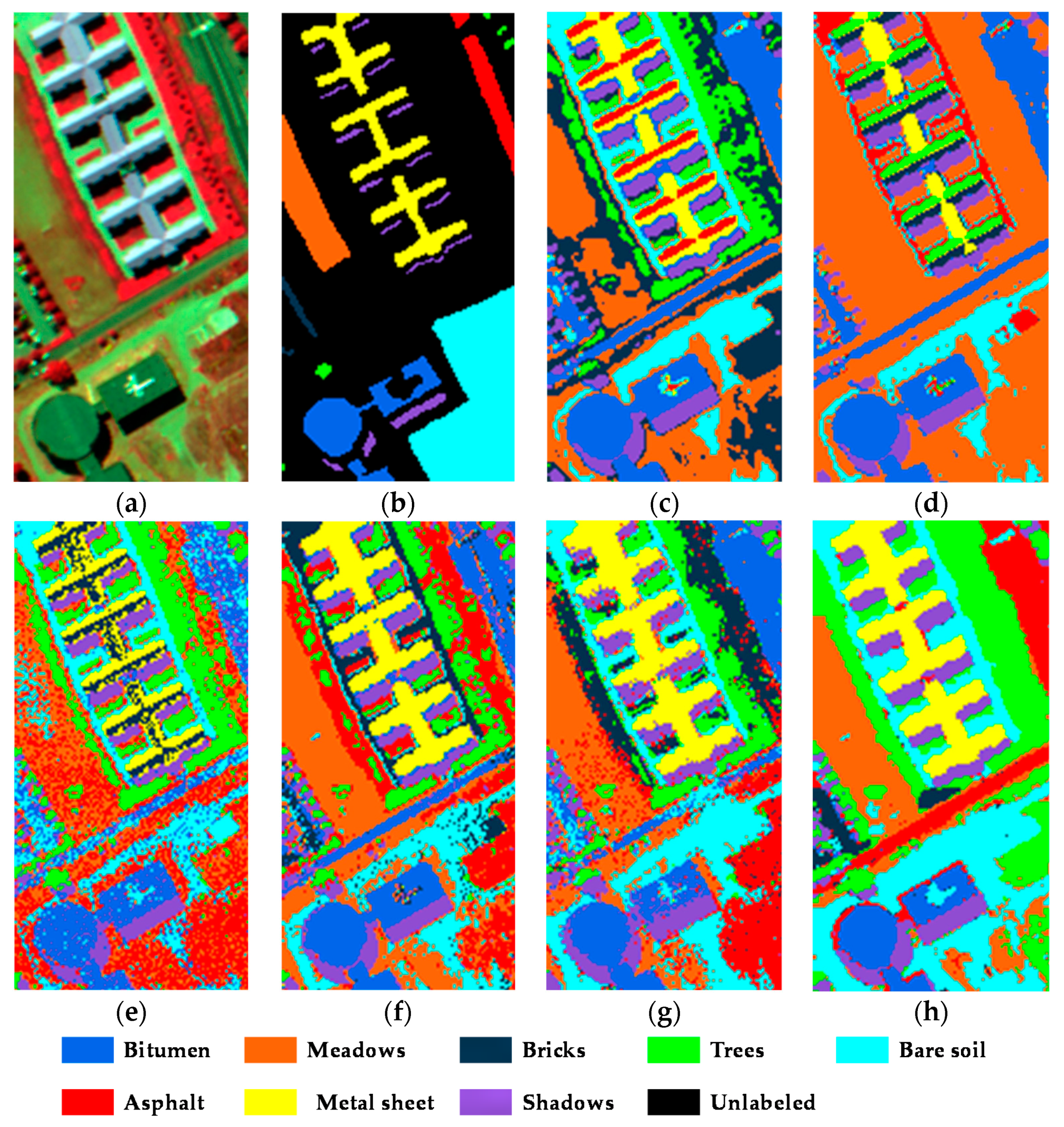
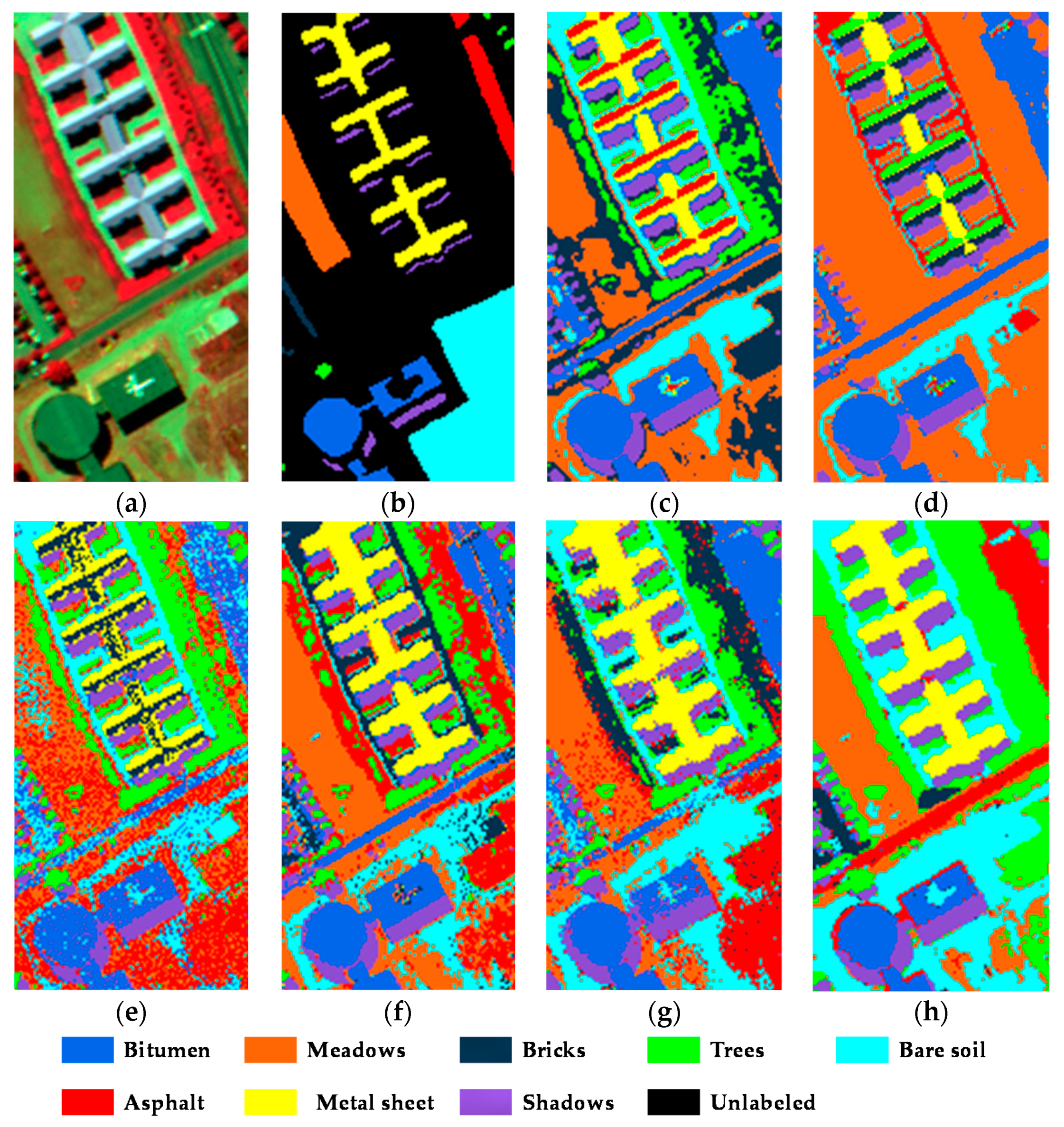
4.2. Experimental Results Obtained with the University of Pavia Image
The second experimental dataset was the University of Pavia image scene, which was collected by the Reflective Optics System Imaging Spectrometer (ROSIS) sensor during a flight campaign over Pavia, Northern Italy. This image has 610 × 340 pixels, with 103 spectral reflectance bands utilized in the experiment after removing the water absorption and noisy bands. The geometric resolution of this image is 1.3 m, with nine classes contained in the scene. Considering the computational complexity, a typical sub-set at a size of 200 × 100 was utilized as the test data [
15,
16,
17], with eight main land-cover classes: Metal sheet, Asphalt, Meadows, Trees, Bare soil, Bitumen, Bricks, and Shadows. All the samples in the ground truth were utilized as the test samples. The composite false-color image and the corresponding ground truth are provided in
Figure 4a,b. Differing from the first experimental dataset, this scene is of a typical city area that has a more complex distribution of land-cover classes. The parameters of each clustering algorithm in this experiment were set as shown in
Table 5.
The cluster maps of the University of Pavia image obtained by each algorithm are shown in
Figure 4, with the corresponding quantitative evaluation provided in
Table 6. For consistency, the best result in each row is shown in bold and the second-best result is underlined. In this experiment, it can be clearly seen that the clustering results are consistent with those of the first experiment, and similar conclusions can be drawn. In this experiment, the proposed KSSC-SMP, again, achieves the best clustering performance in both the visual and quantitative evaluations.
5. Discussion
5.1. Experimental Results Analysis
From
Figure 3 and
Figure 4 and
Table 4 and
Table 6, it can be clearly observed that the clustering performance of FCM-S1 is far from satisfactory, as this clustering model assumes that each cluster satisfies a convex “ball-like” distribution, and it cannot handle the large spectral variability of HSIs [
15]. As a result, misclassification and within-class noise appear in the cluster maps. Compared with FCM-S1, CFSFDP performs even more poorly with a higher level of misclassification, with only a few classes effectively recognized. This suggests that the density-based segmentation strategy does not fit well with the complex structure of HSIs. Specifically, both these methods completely fail to recognize the Asphalt and Bricks classes in the second experiment.
We now compare the clustering results of the SSC algorithm and its extensions. Due to the fact that it ignores the spatial information, the clustering results of SSC are far from satisfactory, with a large amount of salt-and-pepper noise and numbers of misclassifications. Although SSC successfully distinguishes most of the classes in the first experiment, showing great potential for hyperspectral clustering, it performs very badly in the second experiment and obtains the lowest clustering precision. Compared with SSC, S4C effectively improves the clustering performance, by utilizing the spectral weighting strategy to guarantee that highly correlated pixels occupy the dominant place in the representation process, and incorporates the spatial neighborhood information with the local averaging constraint. For example, in the first experiment, the recognition precision of Brocoli-green-weeds-2 and Lettuce-romaine-6wk is improved from 0% and 93.45% to 31.75% and 100%, respectively. On the other hand, L2-SSC also obtains a much better clustering precision than that of the original SSC method, which again suggests the importance of the spatial information from another perspective. However, due to the limitations of the linear representation, there are still some classes that are not effectively recognized by these two methods, such as the Asphalt and Bricks classes in the second experiment. Compared with the three linear methods, the proposed KSSC-SMP algorithm further improves the clustering performance by exploiting the nonlinear structure of the HSI and generating more discriminative features by incorporating the spatial-contextual information with the spatial max pooling operation. For example, in the second experiment, for the Asphalt and Bricks classes, which are beyond the recognition capability of most of the methods, the recognition precision of KSSC-SMP is 100% and 98.94%, respectively, which suggests the superiority of the nonlinear method. As a result, KSSC-SMP achieves much smoother cluster maps with a much higher clustering precision in both experiments, which confirms the superiority of the nonlinear method. Increments in OA of approximately 13%, 9%, and 3% are achieved in the first experiment, compared with that of SSC, S4C, and L2-SSC, respectively, and increments in OA of approximately 26%, 15%, and 17% are achieved in the second experiment. Overall, KSSC-SMP outperforms the other state-of-the-art clustering methods and achieves the best clustering performance in both the visual and quantitative evaluations.
In order to reflect the significant difference between the clustering methods, we took the clustering result of SSC as the baseline and calculated the
z-values [
36] of the other clustering results. For the widely used 5% level of significance, we consider that there is a significant difference between the two clustering methods if |
z| >3.84. From
Table 4 and
Table 6, it can be clearly observed that S
4C and L2-SSC perform significantly better than the original SSC algorithm. In addition, the proposed KSSC-SMP algorithm also performs significantly better than the linear methods. On the other hand, from the last rows of
Table 4 and
Table 6, it can be seen that the four SSC-based algorithms require more computation time than CFSFDP and FCM-S1, but they do provide better clustering accuracies. Fortunately, with the development of computer hardware and the parallel computing technique, this will not be a major problem for much longer.
5.2. Sensitivity Analysis of the Parameters
There are three parameters in the proposed KSSC-SMP algorithm: the regularization parameter , the kernel parameter , and the window size parameter . When analyzing one parameter, the other two parameters were fixed at the optimal values. Both the AVIRIS Salinas image scene and the University of Pavia image scene were utilized to test the sensitivity of the parameters of KSSC-SMP.
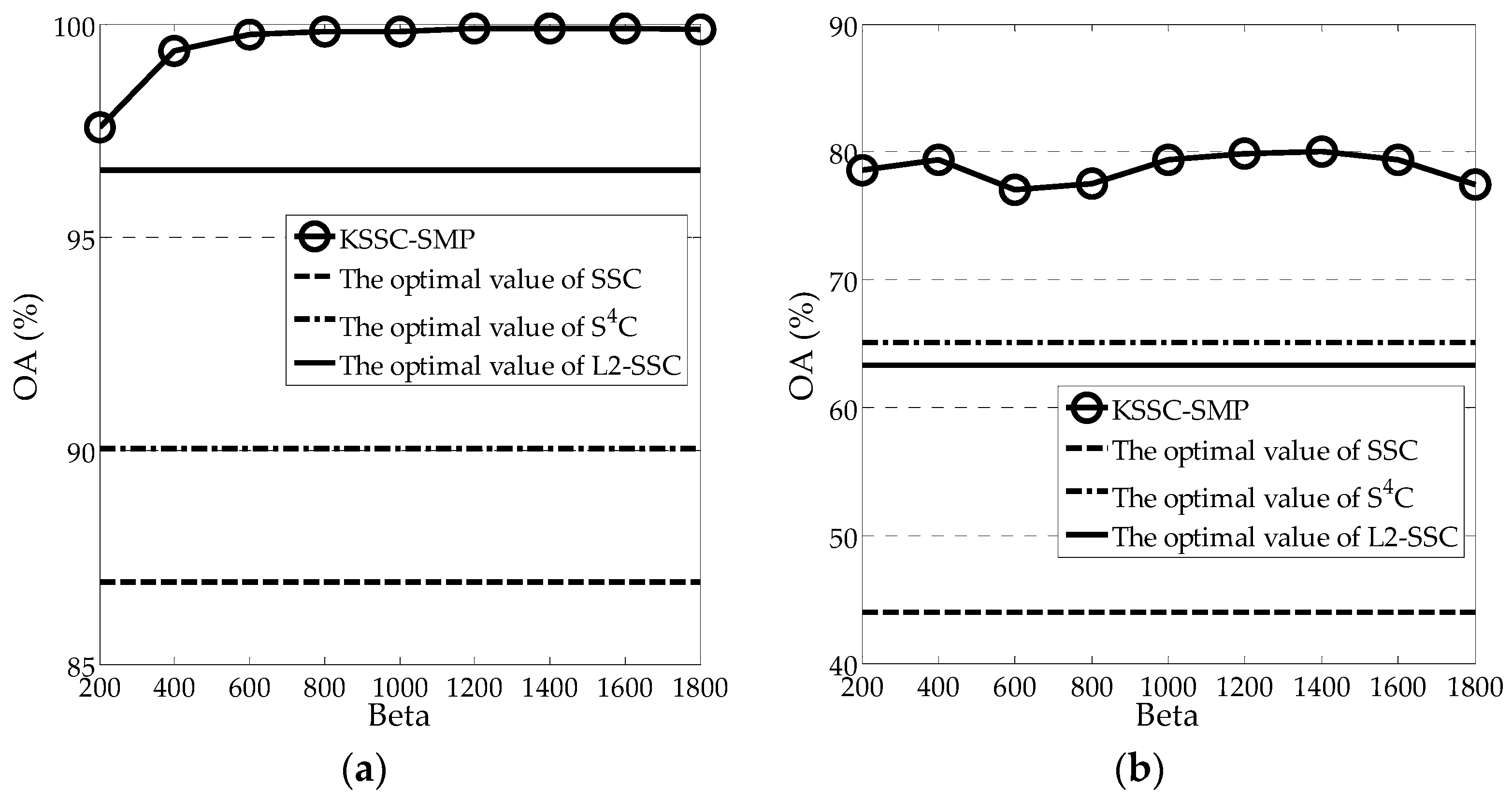
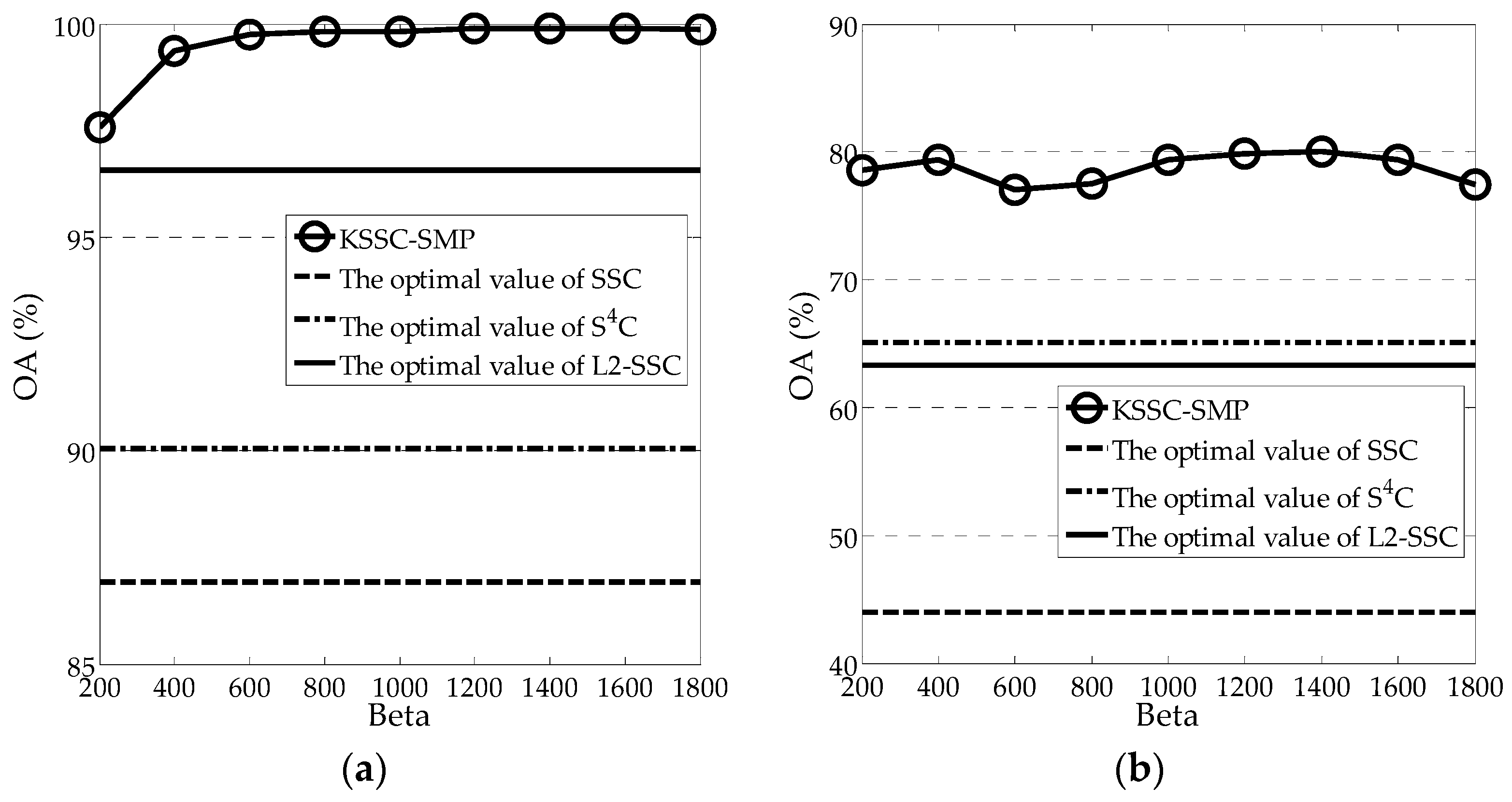
As a tradeoff between the data fidelity term and the sparsity term, the sensitivity of the regularization parameter
was first analyzed. For this parameter, we adopted the same strategy that was used with the other SSC-based methods in [
13,
15]. In practice, parameter
is decided by the following formulation [
15]:
where
is a coefficient, and
can be exactly computed for each dataset.
From Equations (10) and (11), it can be easily found that the sensitivity of
is actually decided by
, as
is fixed for a certain dataset. Therefore, in practice, we only need to fine tune
.
Figure 5 shows the compromise between OA and
for both experimental images. In
Figure 5, the optimal clustering values of SSC, S
4C, and L2-SSC are also provided. From the figure, it can be observed that
is independent of the dataset, to some degree, as the optimal value always falls into a relatively narrow range of [1000, 1400]. For a certain dataset,
can be easily fine-tuned. In addition, it should be noted that KSSC-SMP always achieves a much better precision than the optimal values of the other three linear SSC-based methods, which further demonstrates its effectiveness.
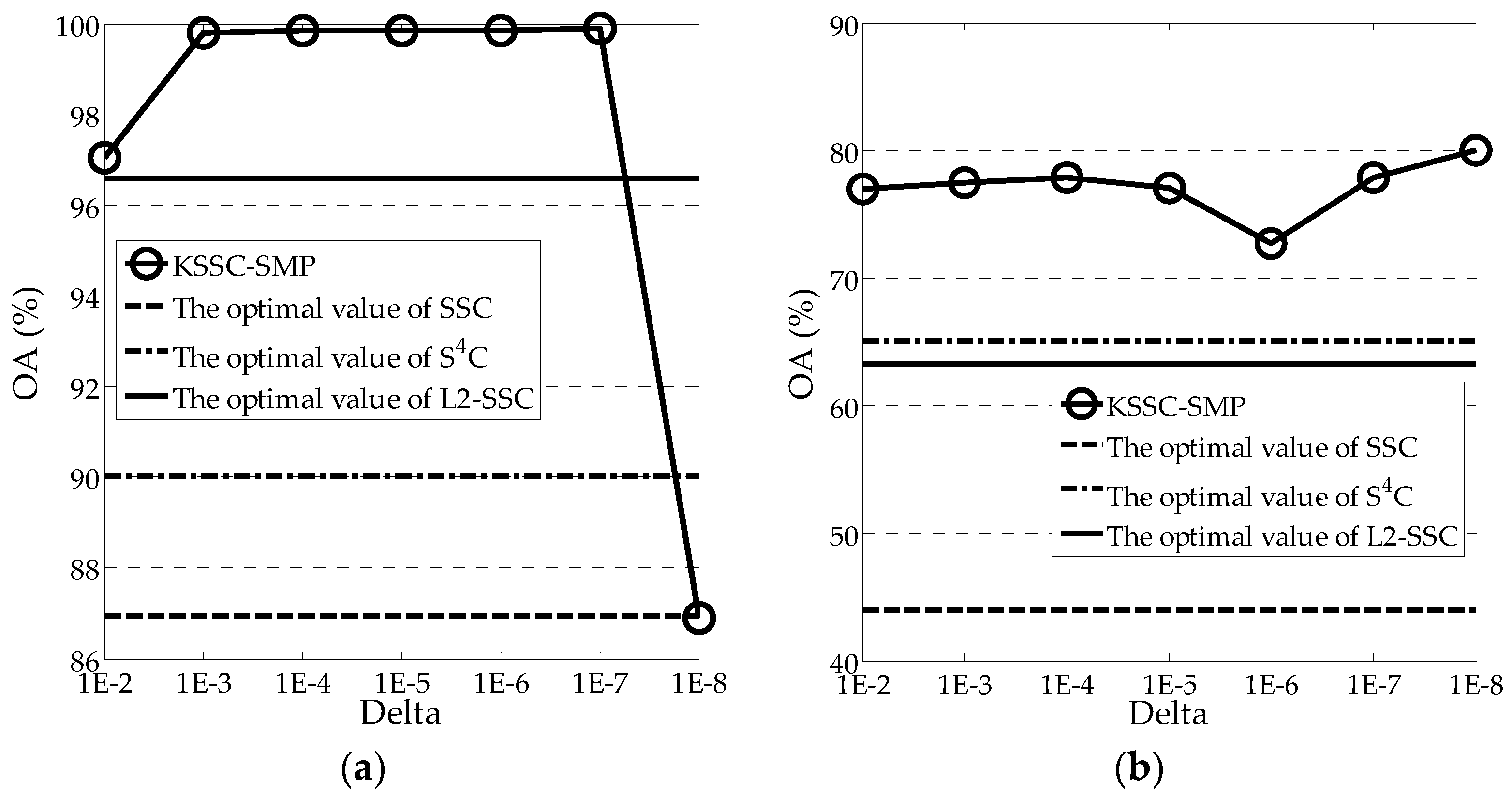
The kernel parameter
controls the quality of the projection of the feature points from the original space to the kernel space, and is quite important for the proposed KSSC-SMP algorithm. Similarly, the sensitivity of the kernel parameter was analyzed through a series of experiments, as shown in
Figure 6. From the figure, it can be seen that the KSSC-SMP algorithm is relatively robust for this parameter, and its performance is relatively stable. The optimal value of
varies for the different datasets. For the Salinas image, the optimal value is 1 × 10
−7, and for the University of Pavia image, it is 1 × 10
−8. However, it can be seen that over a very large range of
, KSSC-SMP can achieve a better performance than the three linear methods. Therefore, the KSSC-SMP algorithm is suitable for use in real applications.
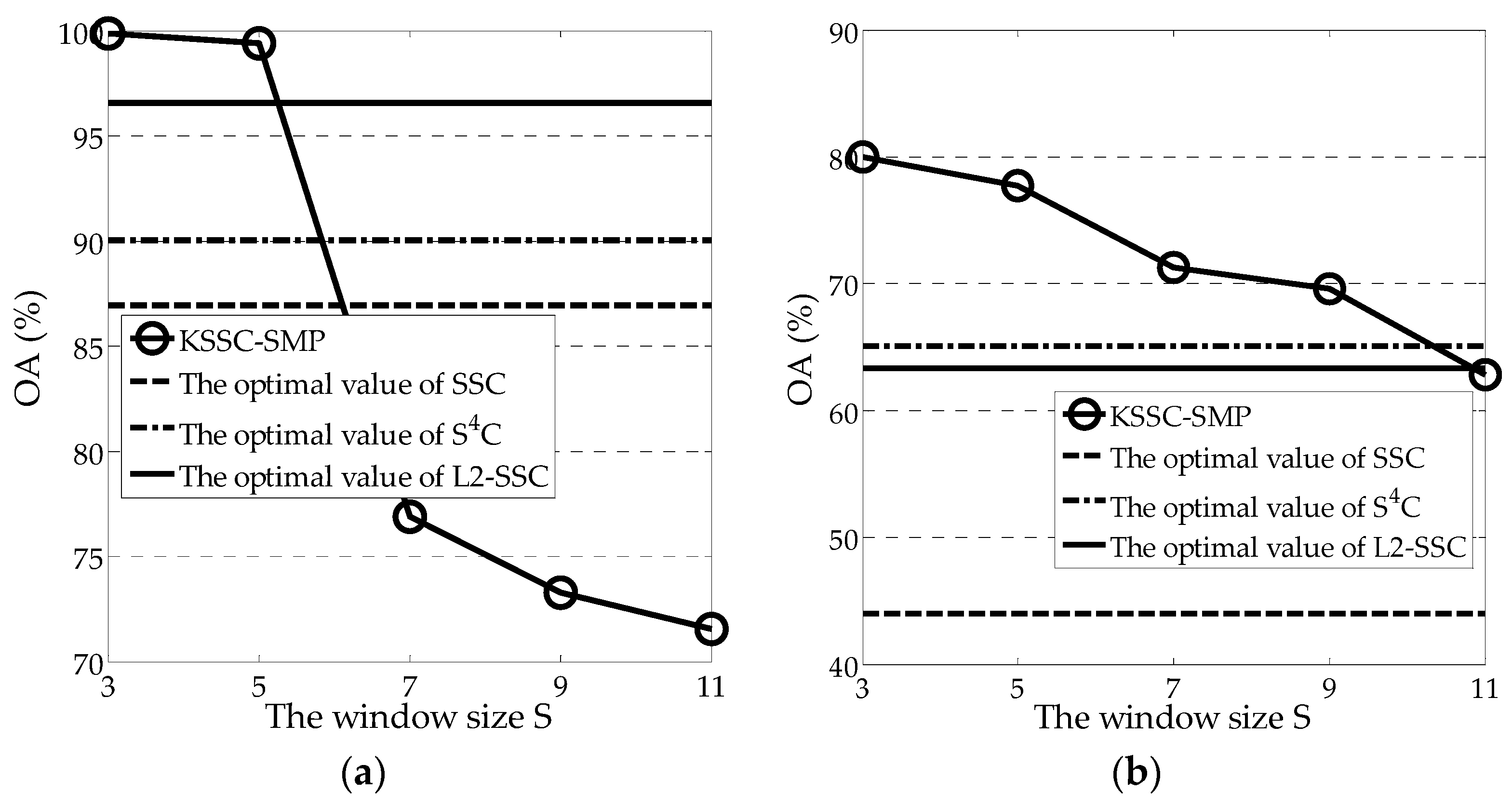
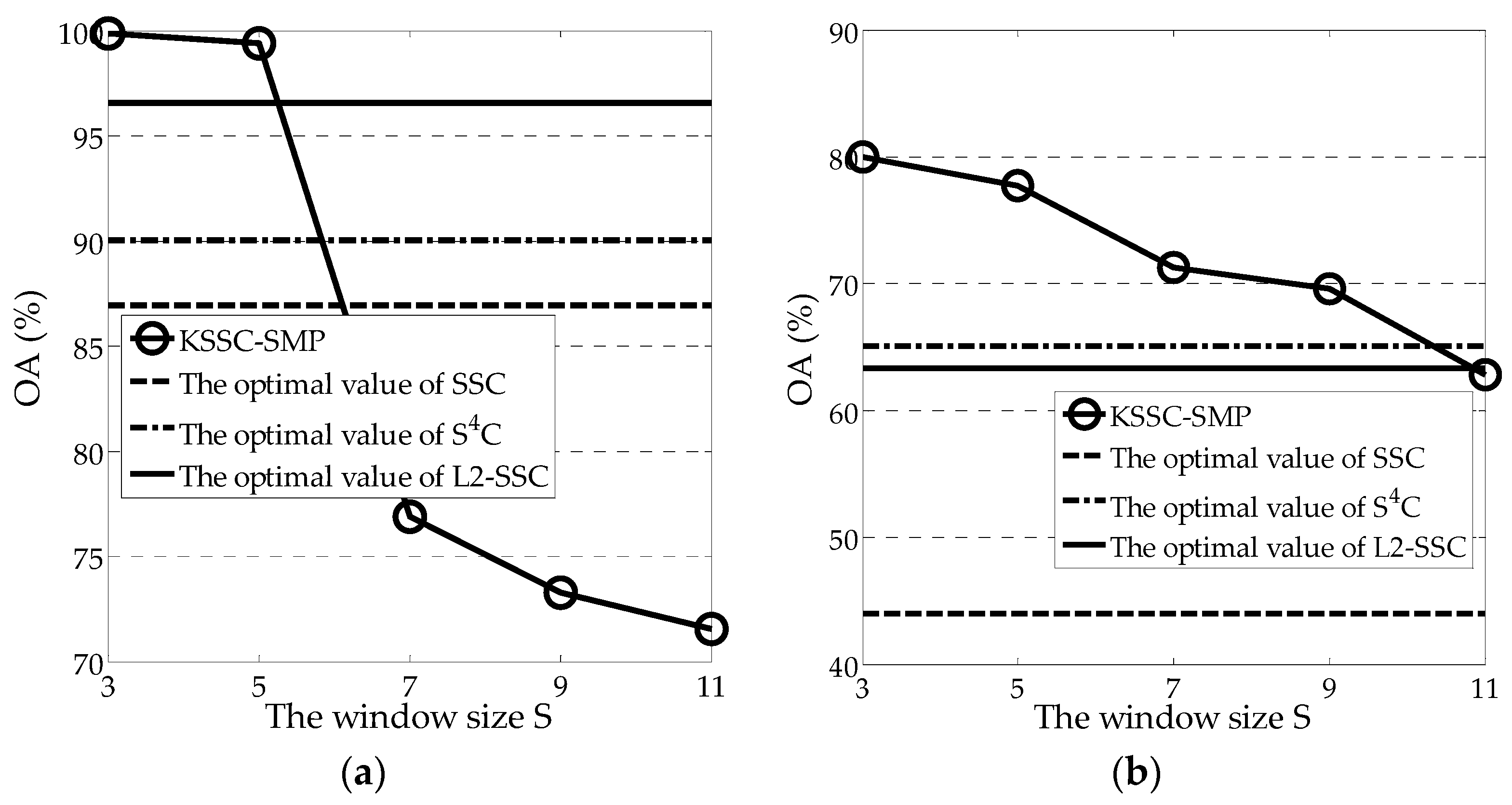
The window size parameter
controls the spatial max pooling operation. The influence of this parameter on the clustering performance is shown in
Figure 7, using a similar strategy to that adopted for the other two parameters. From the figure, it can be seen that the spatial information plays a very important role in the clustering process. For both experimental scenes, the optimal value of parameter
is 3. Both these scenes have a relatively complex distribution of land-cover classes. Generally, parameter
is closely related to the resolution of the image. Again, over a large range of parameter
, KSSC-SMP can achieve a better clustering performance than the three linear methods, which further confirms its effectiveness.
6. Conclusions and Future Lines of Research
In this paper, we have proposed a new kernel sparse subspace clustering algorithm with a spatial max pooling operation (KSSC-SMP) for HSI data interpretation. The proposed approach focuses on exploiting the complex nonlinear structure of HSIs and obtaining a more precise representation coefficient matrix with the kernel sparse representation. In addition, the spatial max pooling operation is introduced to these coefficients to yield new features to fully exploit the discriminative spectral-spatial information of HSIs and the potential of the SSC model. Thereby, KSSC-SMP can effectively improve the clustering performance and guarantee the spatial homogeneity of the final clustering result.
Although the results show that the KSSC-SMP algorithm is very competitive, there are several aspects that could be improved. For instance, the method could be further improved by adaptively determining the regularization parameters and allowing for the extraction of more discriminative spatial features. All of these issues will be addressed in our future work.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}