
Fine-Resolution Repeat Topographic Surveying of Dryland Landscapes Using UAS-Based Structure-from-Motion Photogrammetry: Assessing Accuracy and Precision against Traditional Ground-Based Erosion Measurements


Abstract
:1. Introduction
2. Materials and Methods
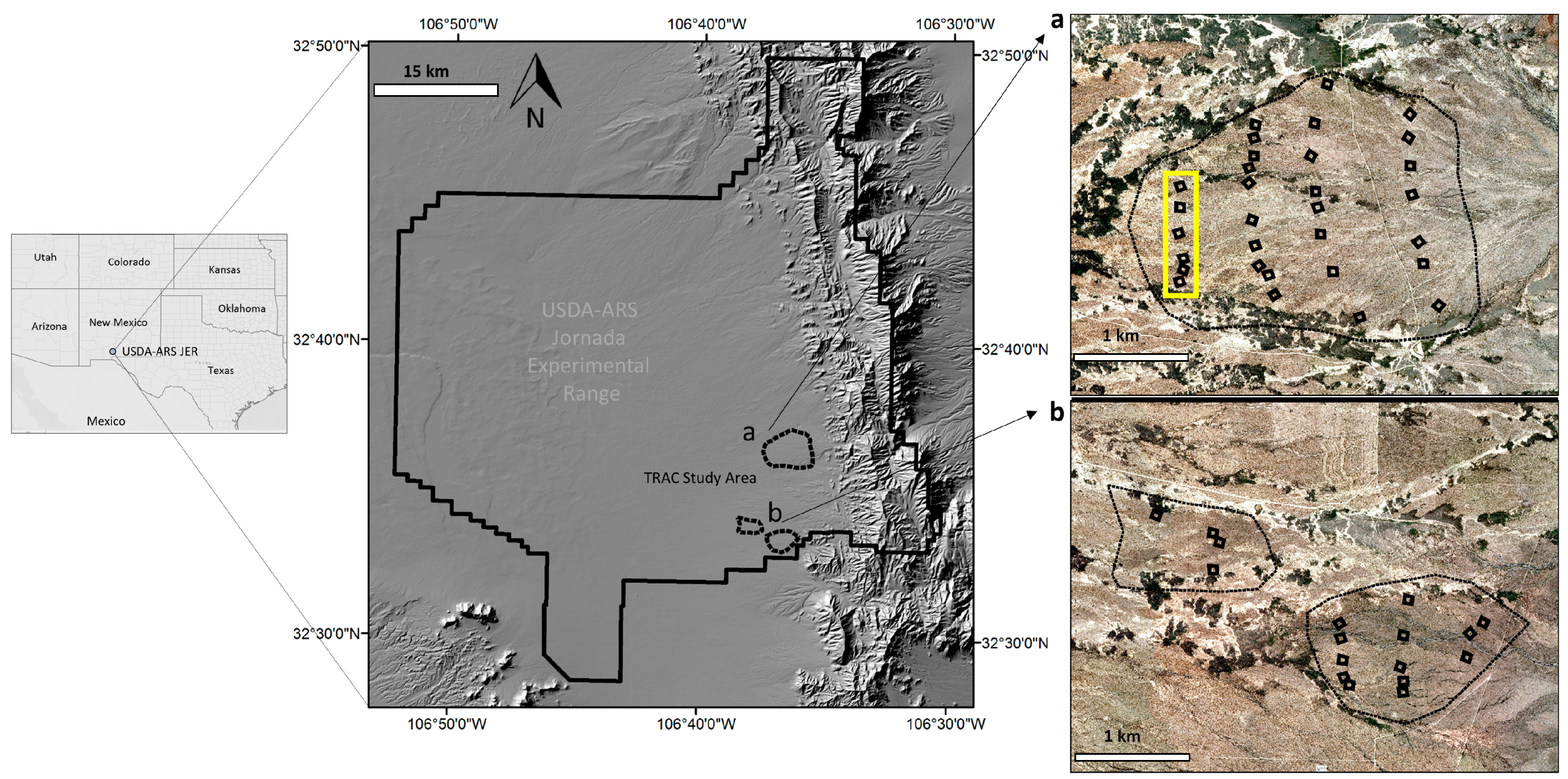
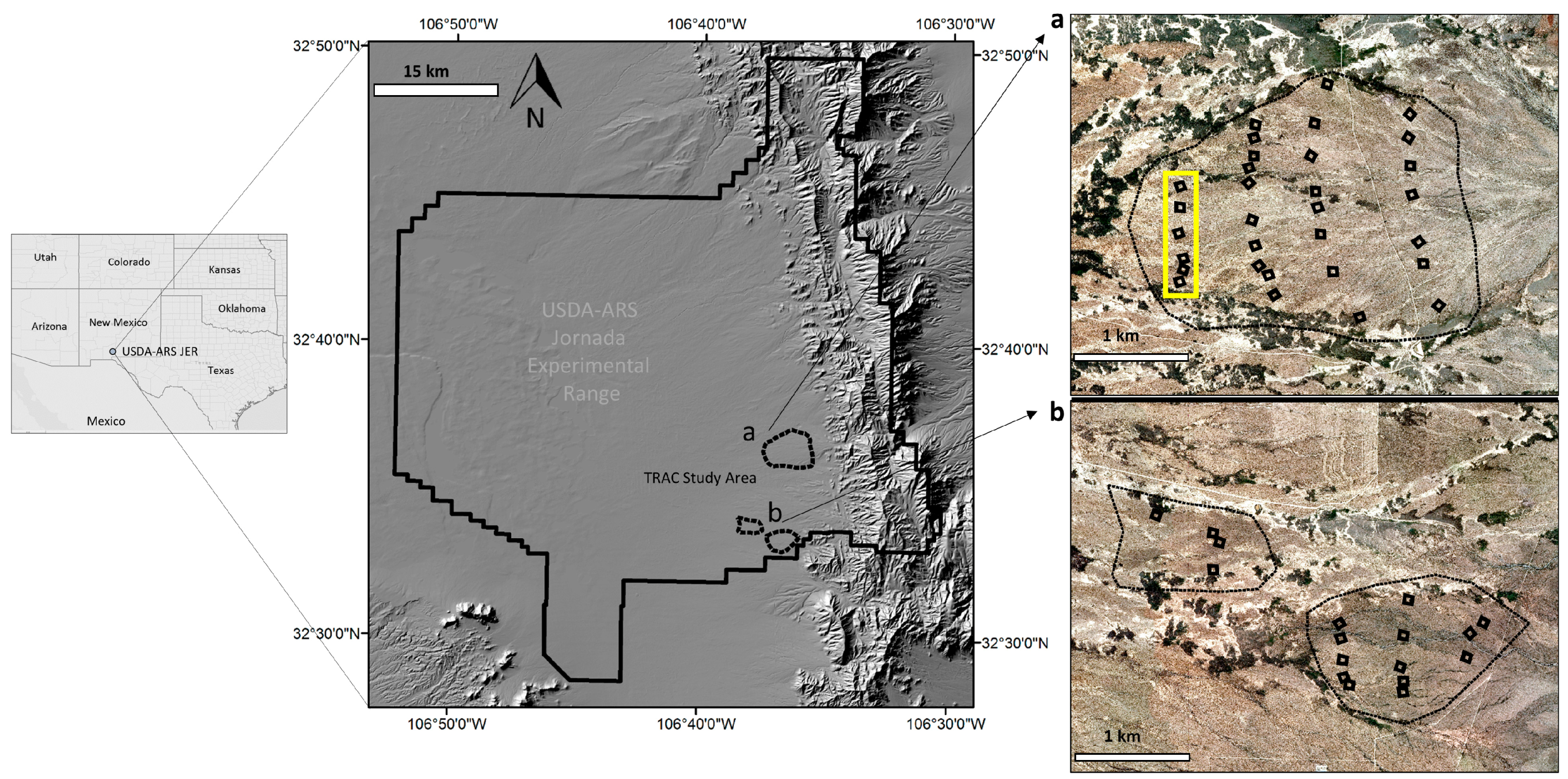
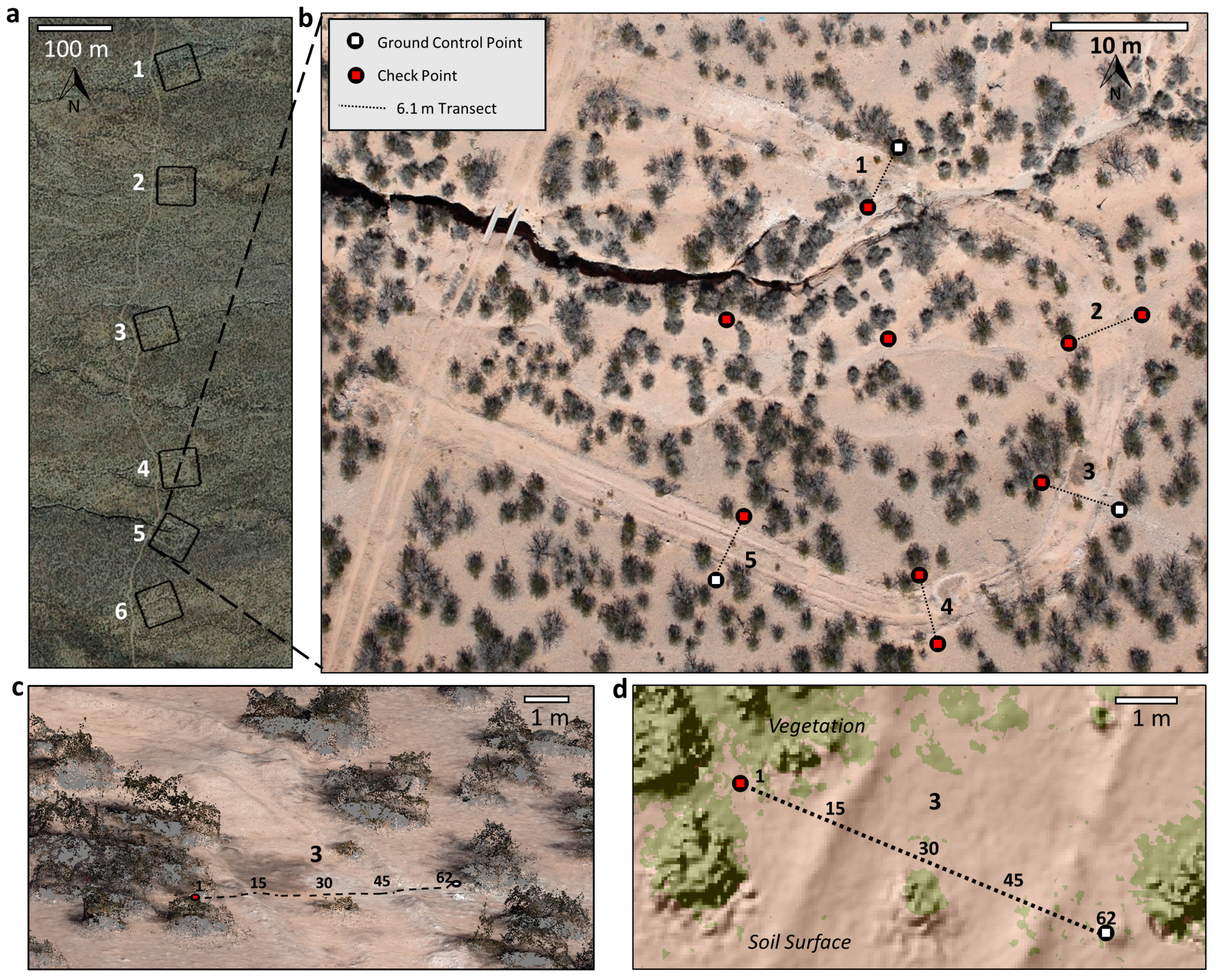
2.1. Study Area
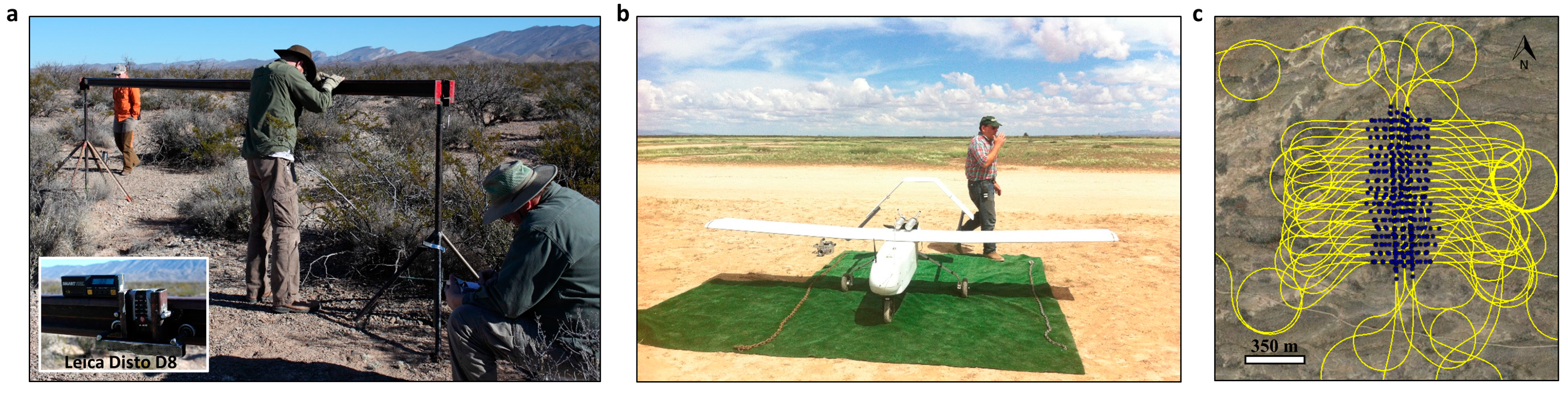
2.2. Field Measurements
2.3. Image Acquisition
2.4. Image Processing
2.5. Assessing Agreement between Erosion Bridge and DTMs
2.6. Assessing DTM Repeatability
3. Results
3.1. DTM Comparison with Check Points
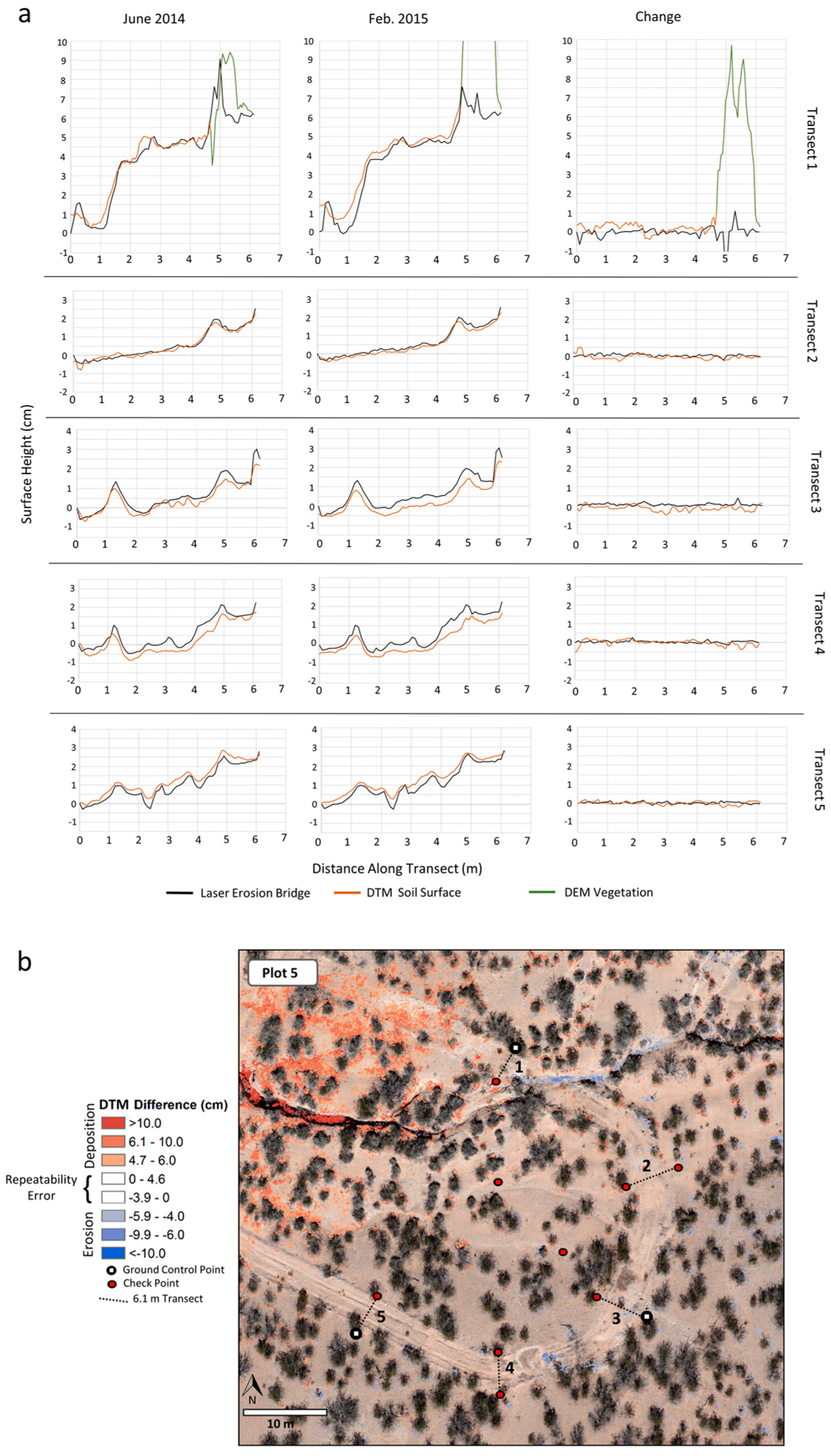
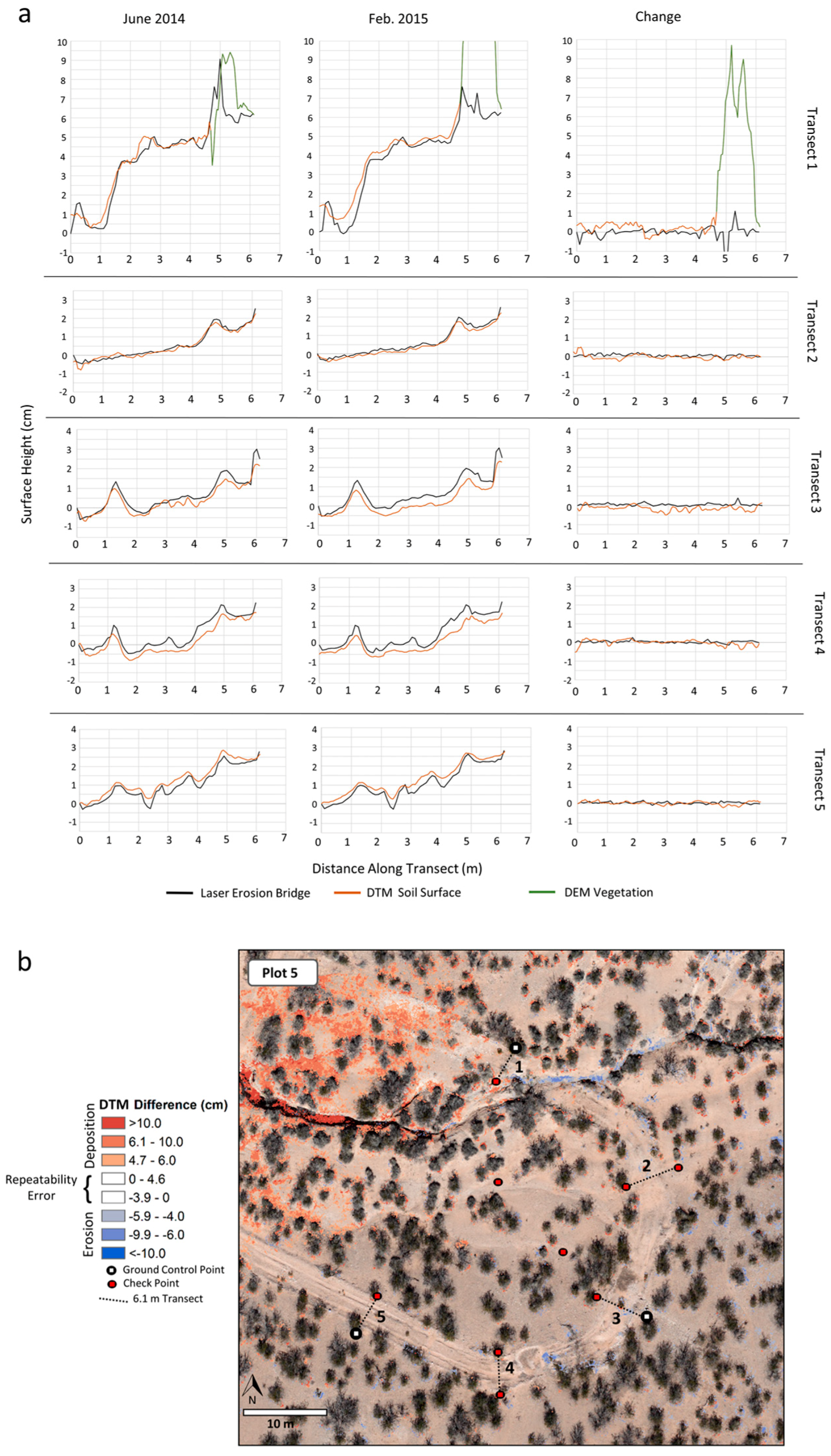
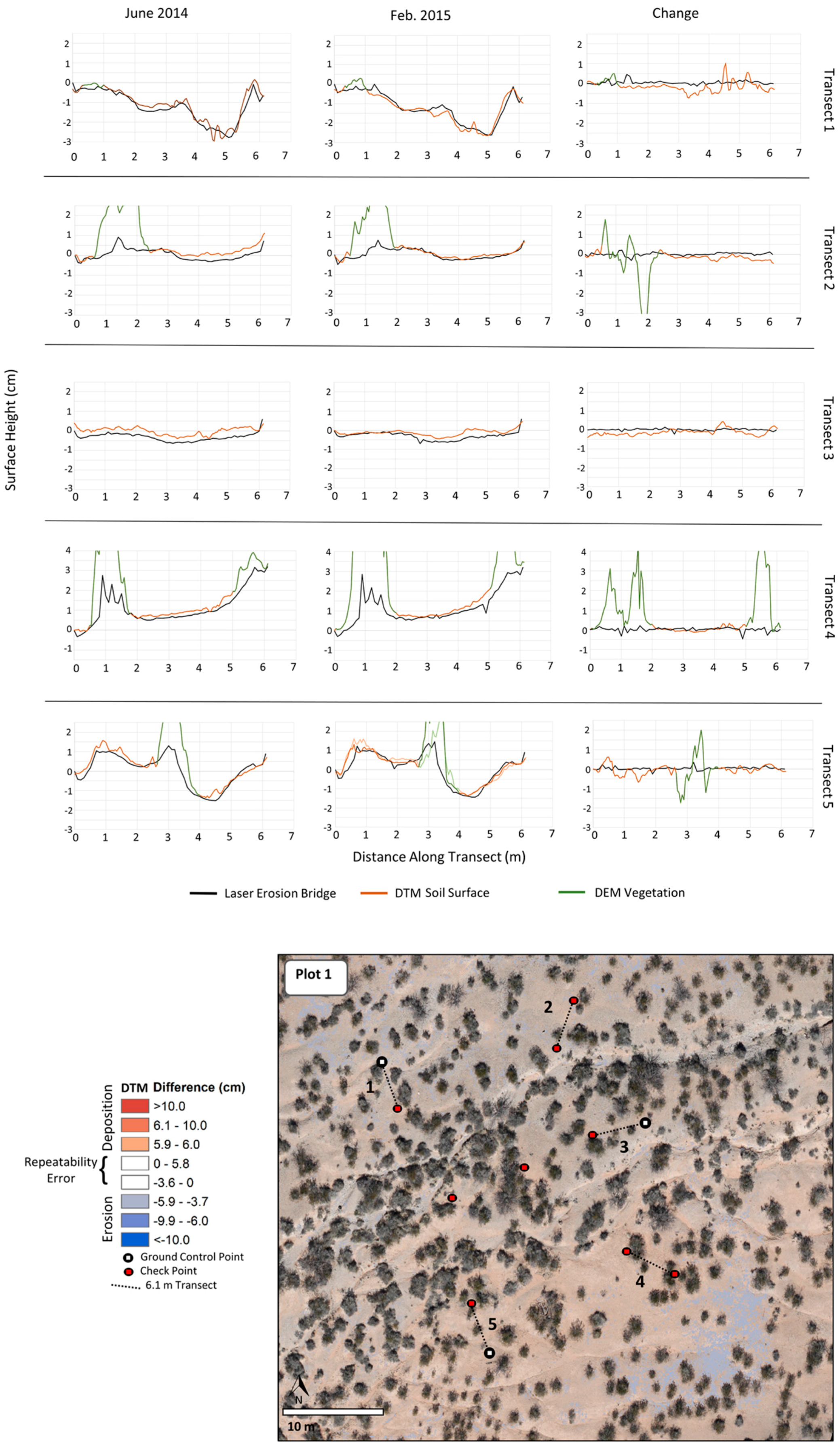
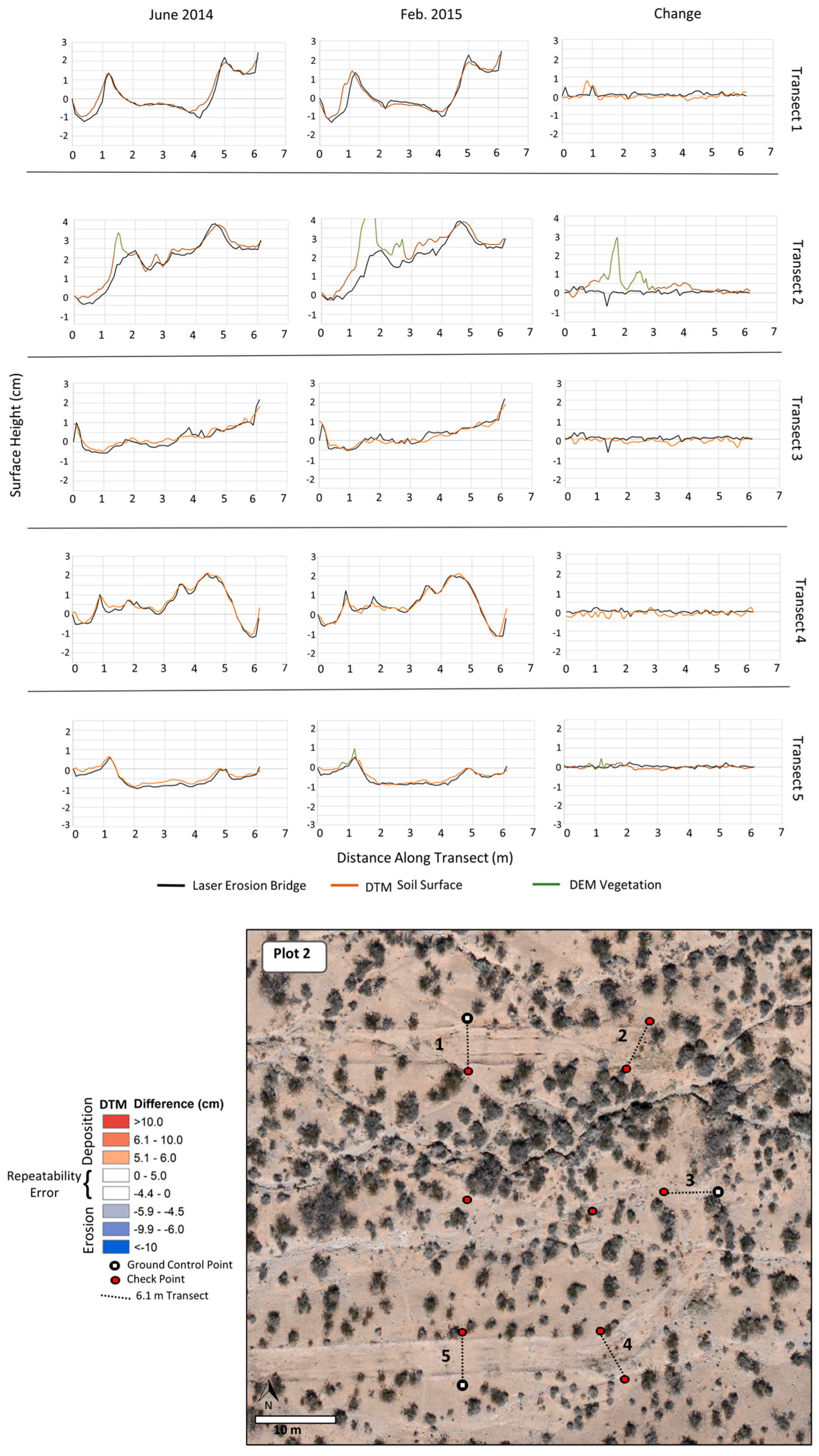
3.2. Agreement between Aerial DTMs and Erosion Bridges (Accuracy)
3.3. DTM Repeatabilty
3.4. Topographic Change
4. Discussion
4.1. Comparison with Other Studies
4.2. Topographic Surveying for Soil Erosion
4.3. DTM Errors
4.4. Limitations for Large Landscapes
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

References
- Martinez-Casasnovas, J.A.; Anton-Fernandez, C.; Ramos, M.C. Sediment production in large gullies of the Mediterranean area (NE Spain) from high-resolution digital elevation models and geographical information systems analysis. Earth Surf. Process. Landf. 2003, 28, 443–456. [Google Scholar] [CrossRef]
- Marzolff, I.; Poesen, J. The potential of 3D gully monitoring with GIS using high-resolution aerial photography and a digital photogrammetry system. Geomorphology 2009, 111, 48–60. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.; Ries, J. Unmanned Aerial Vehicle (Uav) for monitoring soil erosion in morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef]
- Eltner, A.; Baumgart, P.; Maas, H.-G.; Faust, D. Multi-temporal UAV data for automatic measurement of rill and interrill erosion on loess soil. Earth Surf. Process. Landf. 2014, 40, 741–755. [Google Scholar] [CrossRef]
- Gillan, J.K.; Karl, J.W.; Barger, N.N.; Elaksher, A.; Duniway, M.C. Spatially explicit rangeland erosion monitoring using high-resolution digital aerial imagery. Rangel. Ecol. Manag. 2016, 69, 95–107. [Google Scholar] [CrossRef]
- Goodrich, D.C.; Guertin, D.P.; Burns, I.S.; Nearing, M.A.; Stone, J.J.; Wei, H.; Heilman, P.; Hernandez, M.; Spaeth, K.; Pierson, F.; et al. AGWA: The automated geospatial watershed assessment tool to inform rangeland management. Rangelands 2011, 33, 41–47. [Google Scholar] [CrossRef]
- Al-Hamdan, O.Z.; Hernandez, M.; Pierson, F.B.; Nearing, M.A.; Williams, C.J.; Stone, J.J.; Boll, J.; Weltz, M.A. Rangeland hydrology and erosion model (RHEM) enhancements for applications on disturbed rangelands. Hydrol. Process. 2014, 29, 445–457. [Google Scholar] [CrossRef]
- Vivoni, E.; Rango, A.; Anderson, C. Ecohydrology with unmanned aerial vehicles. Ecosphere 2014, 5, 1–14. [Google Scholar] [CrossRef]
- Lassueur, T.; Joost, S.; Randin, C.F. Very high resolution digital elevation models: Do they improve models of plant species distribution? Ecol. Model. 2006, 198, 139–153. [Google Scholar] [CrossRef]
- Templeton, R.C.; Vivoni, E.R.; Méndez-Barroso, L.A.; Pierini, N.A.; Anderson, C.A.; Rango, A.; Laliberte, A.S.; Scott, R.L. High-resolution characterization of a semiarid watershed: Implications on evapotranspiration estimates. J. Hydrol. 2014, 509, 306–319. [Google Scholar] [CrossRef]
- Niethammer, U.; Rothmund, S.; James, M.R.; Travelletti, J.; Joswig, M. UAV-based remote sensing of landslides. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 496–501. [Google Scholar]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Lucieer, A.; Jong, S.M.D.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2013, 38, 97–116. [Google Scholar] [CrossRef]
- Rosnell, T.; Honkavaara, E. Point cloud generation from aerial image data acquired by a quadrocopter type micro unmanned aerial vehicle and a digital still camera. Sensors 2012, 12, 453–480. [Google Scholar] [CrossRef] [PubMed]
- Pajares, G. Overview and current status of remote sensing applications based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from Internet photo collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Ai, M.; Hu, Q.; Li, J.; Wang, M.; Yuan, H.; Wang, S. A robust photogrammetric processing method of low-altitude UAV images. Remote Sens. 2015, 7, 2302–2333. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Shakesby, R.A. The soil erosion bridge: A device for micro-profiling soil surfaces. Earth Surf. Process. Landf. 1993, 18, 823–827. [Google Scholar] [CrossRef]
- Fanning, P. Long-term contemporary erosion rates in an arid rangelands environment in western New South Wales, Australia. J. Arid Environ. 1994, 28, 173–187. [Google Scholar] [CrossRef]
- Sirvent, J.; Desir, G.; Gutierrez, M.; Sancho, C.; Benito, G. Erosion rates in badland areas recorded by collectors, erosion pins and profilometer techniques (Ebro Basin, NE-Spain). Geomorphology 1997, 18, 61–75. [Google Scholar] [CrossRef]
- Martínez-Casasnovas, J.A.; Ramos, M.C.; Ribes-Dasi, M. Soil erosion caused by extreme rainfall events: mapping and quantification in agricultural plots from very detailed digital elevation models. Geoderma 2002, 105, 125–140. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2009, 156, 136–156. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Neugirg, F.; Stark, M.; Kaiser, A.; Vlacilova, M.; Della Seta, M.; Vergari, F.; Schmidt, J.; Becht, M.; Haas, F. Erosion processes in calanchi in the Upper Orcia Valley, Southern Tuscany, Italy based on multitemporal high-resolution terrestrial LiDAR and UAV surveys. Geomorphology 2016, 269, 8–22. [Google Scholar] [CrossRef]
- Lucieer, A.; Turner, D.; King, D.H.; Robinson, S.A. Using an Unmanned Aerial Vehicle (UAV) to capture micro-topography of antarctic moss beds using an Unmanned Aerial Vehicle (UAV) to capture micro-topography. Int. J. Appl. Earth Obs. Geoinf. 2014, 27, 53–62. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of uav-based earth topography reconstructions based on structure-from-motion algorithms. Geomorphology 2015, 260, 4–15. [Google Scholar] [CrossRef]
- Stöcker, C.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of UAV and close range photogrammetry—A case study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Eltner, A.; Schneider, D. Analysis of different methods for 3D reconstruction of natural surfaces from parallel-axes UAV images. Photogramm. Rec. 2015, 30, 279–299. [Google Scholar] [CrossRef]
- Milan, D.J.; Heritage, G.L.; Large, A.R.G.; Fuller, I.C. Filtering spatial error from DEMs: Implications for morphological change estimation. Geomorphology 2011, 125, 160–171. [Google Scholar] [CrossRef]
- Nash, M.S.; Jackson, E.; Whitford, W.G. Soil microtopography on grazing gradients in Chihuahuan desert grasslands. J. Arid Environ. 2003, 55, 181–192. [Google Scholar] [CrossRef]
- White, C.S.; Loftin, S.R. Response of 2 semiarid grasslands to cool-season pre-scribed fire. J. Range Manag. 2000, 53, 52–61. [Google Scholar] [CrossRef]
- White, C.S.; Pendleton, R.L.; Pendleton, B.K. Response of two semiarid grasslands to a second fire application. Rangel. Ecol. Manag. 2006, 59, 98–106. [Google Scholar] [CrossRef]
- Sankey, J.B.; Glenn, N.F.; Germino, M.J.; Gironella, A.I.N.; Thackray, G.D. Relationships of aeolian erosion and deposition with LiDAR-derived landscape surface roughness following wildfire. Geomorphology 2010, 119, 135–145. [Google Scholar] [CrossRef]
- Shakesby, R.A.; Coelho, C.O.A.; Ferreira, A.J.D.; Walsh, R.P.D. Ground-level changes after wildfire and ploughing in eucalyptus and pine forests, Portugal: Implications for soil microtopographical development and soil longevity. Land Degrad. Dev. 2002, 13, 111–127. [Google Scholar] [CrossRef]
- Van De, N.; Douglas, I.; Mcmorrow, J.; Lindley, S.; Thuy Binh, D.K.N.; Van, T.T.; Thanh, L.H.; Tho, N. Erosion and nutrient loss on sloping land under intense cultivation in Southern Vietnam. Geogr. Res. 2008, 46, 4–16. [Google Scholar] [CrossRef]
- Eagleston, H.; Rubin, C. Non-motorized winter recreation impacts to snowmelt erosion, tronsen basin, eastern cascades, Washington. Environ. Manag. 2013, 51, 167–181. [Google Scholar] [CrossRef] [PubMed]
- Okayasu, T.; Muto, M.; Jamsran, U.; Takeuchi, K. Spatially heterogeneous impacts on rangeland after social system change in Mongolia. Land Degrad. Dev. 2007, 18, 555–566. [Google Scholar] [CrossRef]
- Brooks, M.L.; Lair, B. Ecological Effects of Vehicular Routes in a Desert Ecosystem; Western Ecological Research Center: Las Vegas, NV, USA, 2005. [Google Scholar]
- Watts, R.D.; Compton, R.W.; Mccammon, J.H.; Rich, C.L.; Wright, M.S.; Owens, T.; Ouren, D.S. Roadless space of the conterminous United States. Science 2007, 316, 736–738. [Google Scholar] [CrossRef] [PubMed]
- Duniway, M.C.; Herrick, J.E. Disentangling road network impacts: The need for a holistic approach. J. Soil Water Conserv. 2011, 66, 31A–36A. [Google Scholar] [CrossRef]
- Laflen, J.M.; Forest, S. WEPP-Predicting water erosion using a process-based model. J. Soil Water Conserv. 1997, 52, 96–102. [Google Scholar]
- Grismer, M.E. Soil restoration and erosion control: Quantitative assessment and direction. Trans. ASABE 2007, 50, 1619–1626. [Google Scholar] [CrossRef]
- Duniway, M.C.; Herrick, J.E.; Pyke, D.A.; Toledo, P.D. Assessing transportation infrastructure impacts on rangelands: Test of a Standard rangeland assessment protocol. Rangel. Ecol. Manag. 2010, 63, 524–536. [Google Scholar] [CrossRef]
- Duniway, M.C.; Herrick, J.E. Assessing impacts of roads: Application of a Standard assessment protocol. Rangel. Ecol. Manag. 2013, 66, 364–375. [Google Scholar] [CrossRef]
- Herrick, J.E.; Van Zee, J.W.; Harvstad, K.M.; Burkett, L.M.; Whitford, W.G. Monitoring Manual for Grassland, Shrubland, and Savanna Ecosystems: Volume II; Jornada Experimental Range: Las Cruces, NM, USA, 2009. [Google Scholar]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Hooke, J.; Kirkby, M.J. Reconstructing flash flood magnitudes using “Structure-from-Motion”: A rapid assessment tool. J. Hydrol. 2014, 519, 1914–1927. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Kraus, K. Photogrammetry: Geometry from Images and Laser Scans; De Gruyter: Berlin, Germany, 2007. [Google Scholar]
- McGlone, J.C. Manual of Photogrammetry; American Society for Photogrammetry and Remote Sensing: Bethesda, MD, USA, 2013. [Google Scholar]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellan, A. Image-based surface reconstruction in geomorphometry—Merits, limits and developments of a promising tool for geoscientists. Earth Surf. Dyn. Discuss. 2016, 3, 1445–1508. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery, based on structure from motion (SfM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Long, N.; Millescamps, B.; Pouget, F.; Dumon, A.; Lachaussée, N.; Bertin, X. Accuracy assessment of coastal topography derived from UAV images. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 1127–1134. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G. Ground-control networks for image based surface reconstruction : An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sens. 2016, 8, 16–19. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; D’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Baykal, O.; Tari, E.; Coşkun, M.Z.; Erden, T. Accuracy of point layout with polar coordinates. J. Surv. Eng. 2005, 131, 87–93. [Google Scholar] [CrossRef]
- Franklin, K.D.; Meyer, T.H. Centering error for range poles. Surv. Land Inf. Sci. 2016, 75, 77–84. [Google Scholar]
- Leica Geosystems. Available online: http://pdf.directindustry.com/pdf/leica-geosystems/leica-flexline-ts02plus/14324-254223.html (accessed on 24 April 2017).
- Lowe, D.G. Distinctive image features from scale invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A.; Osborn, J. The impact of the calibration method on the accuracy of point clouds derived using unmanned aerial vehicle multi-view stereopsis. Remote Sens. 2015, 7, 11933–11953. [Google Scholar] [CrossRef]
- Agisoft. Available online: http://www.agisoft.com/pdf/photoscan-pro_1_1_en.pdf (accessed on 24 April 2017).
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2015, 40, 247–275. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Brazier, R.E.; Anderson, K. Ultra-fine grain landscape-scale quantification of dryland vegetation structure with drone-acquired structure-from-motion photogrammetry. Remote Sens. Environ. 2016, 183, 129–143. [Google Scholar] [CrossRef]
- jkarl/Photogrammetry. Available online: https://github.com/jkarl/photogrammetry (accessed on 1 April 2017).
- Lane, S.N.; Westaway, R.M.; Murray Hicks, D. Estimation of erosion and deposition volumes in a large, gravel-bed, braided river using synoptic remote sensing. Earth Surf. Process. Landf. 2003, 28, 249–271. [Google Scholar] [CrossRef]
- Brasington, J.; Langham, J.; Rumsby, B. Methodological sensitivity of morphometric estimates of coarse fluvial sediment transport. Geomorphology 2003, 53, 299–316. [Google Scholar] [CrossRef]
- Derose, R.C.; Gomez, B.; Marden, M.; Trustrum, N.A. Gully erosion in Mangatu Forest, New Zealand, estimated from digital elevation models. Earth Surf. Process. Landf. 1998, 23, 1045–1053. [Google Scholar] [CrossRef]
- Gessesse, G.D.; Fuchs, H.; Mansberger, R.; Klik, A.; Rieke-Zapp, D.H. Assessment of ersosion, deposition and rill development on irregular soil surfaces using close range digital photogrammetry. Photogramm. Rec. 2010, 25, 299–318. [Google Scholar] [CrossRef]
- Glendell, M.; McShane, G.; Farrow, L.; James, M.R.; Quinton, J.; Anderson, K.; Evans, M.; Benaud, P.; Rawlins, B.; Morgan, D.; et al. Testing the utility of structure from motion photogrammetry reconstructions using small unmanned aerial vehicles and ground photography to estimate the extent of upland soil erosion. Earth Surf. Process. Landf. 2017. [Google Scholar] [CrossRef]
- Mudge, J.F.; Baker, L.F.; Edge, C.B.; Houlahan, J.E. Setting an optimal α that minimizes errors in null hypothesis significance tests. PLoS ONE 2012, 7, e32734. [Google Scholar] [CrossRef] [PubMed]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Jaud, M.; Passot, S.; Le Bivic, R.; Delacourt, C.; Grandjean, P.; Le Dantec, N. Assessing the accuracy of high resolution digital surface models computed by PhotoScan® and MicMac® in sub-optimal survey conditions. Remote Sens. 2016, 8, 465. [Google Scholar] [CrossRef]
- Jensen, J.L.R.; Mathews, A.J. Assessment of image-based point cloud products to generate a bare earth surface and estimate canopy heights in a woodland ecosystem. Remote Sens. 2016, 8, 50. [Google Scholar] [CrossRef]
- Rehak, M.; Mabillard, R.; Skaloud, J. A micro-UAV with the capability of direct georeferencing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 317–323. [Google Scholar] [CrossRef]
- Hugenholtz, C.; Brown, O.; Walker, J.; Barchyn, T.; Nesbit, P.; Kucharczyk, M.; Myshak, S. Spatial accuracy of UAV-derived orthoimagery and topography: Comparing photogrammetric models processed with direct geo-referencing and ground control points. Geomatica 2016, 70, 21–30. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Process. Landf. 2016, 42, 473–486. [Google Scholar] [CrossRef]
- Goff, S.A.; Vaughn, M.; McKay, S.; Lyons, E.; Stapleton, A.E.; Gessler, D.; Matasci, N.; Wang, L.; Hanlon, M.; Lenards, A.; et al. The iPlant collaborative: Cyberinfrastructure for plant biology. Front. Plant Sci. 2011, 2, 34. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft | Bat 4 Fixed-Wing |
| Sensor | Canon EOS 5D Mark II, 21 megapixels Canon EF 35 mm lens |
| Flying height above ground level (m) | ~152 AGL |
| Image Forward Overlap (%) | 66 |
| Image Side Overlap (%) | 66 |
| Image Ground Footprint (m) | 156 × 104 |
| Ground sampling distance (cm) | ~2.7 |
| Image Count | 25–35 images per plot |
| Avg. Point density (points·m−2) | 1444 |
| DTM cell size (cm) | 5 |
| Plot | Acquisition Date | Check Points n | Mean Difference (cm) | Absolute Mean Difference (cm) | RMSE (cm) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Easting | Northing | Elevation | Easting | Northing | Elevation | Easting | Northing | Elevation | |||
| 1 | June 2014 | 9 | −0.1 | −0.9 | −0.2 | 1.0 | 0.9 | 1.7 | 1.1 | 1.1 | 2.2 |
| February 2015 | 9 | 0.0 | −1.0 | 0.2 | 0.8 | 1.3 | 0.9 | 1.0 | 1.8 | 1.2 | |
| 2 | June 2014 | 9 | −0.4 | 0.8 | −1.0 | 1.0 | 1.1 | 3.0 | 1.7 | 1.7 | 4.0 |
| February 2015 | 9 | −0.5 | 0.2 | −1.1 | 1.1 | 0.4 | 2.5 | 1.4 | 0.5 | 3.8 | |
| 3 | June 2014 | 9 | −0.4 | 0.1 | −0.2 | 0.9 | 0.7 | 0.9 | 1.1 | 0.9 | 1.2 |
| February 2015 | 9 | −0.6 | −0.0 | 0.1 | 0.9 | 0.6 | 1.3 | 1.3 | 0.9 | 1.4 | |
| 4 | June 2014 | 9 | 0.2 | 0.1 | 0.1 | 0.3 | 0.6 | 1.1 | 0.4 | 0.9 | 1.4 |
| February 2015 | 9 | 0.6 | −0.5 | 1.0 | 0.6 | 0.9 | 1.1 | 0.7 | 1.1 | 1.3 | |
| 5 | June 2014 | 9 | 0.4 | 0.3 | 1.7 | 0.8 | 1.4 | 2.0 | 1.0 | 2.6 | 2.7 |
| February 2015 | 9 | −0.5 | 0.3 | 2.0 | 1.2 | 1.0 | 2.9 | 1.3 | 1.1 | 3.5 | |
| 6 | June 2014 | 9 | −0.3 | 0.3 | 0.0 | 0.7 | 0.6 | 0.9 | 0.9 | 0.7 | 1.1 |
| February 2015 | 9 | 0.1 | 0.2 | 0.1 | 0.6 | 0.8 | 0.4 | 0.8 | 0.9 | 0.5 | |
| All | June 2014 | 54 | −0.1 | 0.1 | 0.0 | 0.8 | 0.9 | 1.6 | 1.1 | 1.5 | 2.3 |
| February 2015 | 54 | −0.1 | −0.1 | 0.4 | 0.9 | 0.8 | 1.5 | 1.1 | 1.1 | 2.3 | |
| Plot | Check Points n | Mean Difference (cm) | Absolute Difference (cm) | RMSE (cm) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Easting | Northing | Elevation | Easting | Northing | Elevation | Easting | Northing | Elevation | ||
| 1 | 9 | −0.2 | 0.1 | −0.5 | 1.0 | 1.2 | 1.4 | 1.2 | 1.7 | 2.0 |
| 2 | 9 | 0.0 | 0.6 | 0.1 | 1.5 | 1.0 | 1.1 | 1.9 | 1.5 | 1.4 |
| 3 | 9 | 0.1 | 0.1 | −0.3 | 0.9 | 0.9 | 1.4 | 1.1 | 1.2 | 1.6 |
| 4 | 9 | −0.3 | 0.6 | −0.9 | 0.5 | 1.2 | 1.4 | 0.6 | 1.3 | 1.7 |
| 5 | 9 | 1.0 | 0.0 | −0.3 | 1.7 | 1.5 | 1.6 | 1.8 | 2.3 | 2.1 |
| 6 | 9 | −0.5 | 0.0 | −0.1 | 0.8 | 0.6 | 0.9 | 1.0 | 0.7 | 1.0 |
| All | 54 | 0.0 | 0.2 | −0.3 | 1.1 | 1.1 | 1.0 | 1.4 | 1.6 | 1.7 |
| Plot | Acquisition Date | Sample Size n | Mean Difference (cm) | Absolute Mean Difference (cm) | RMSE (cm) |
|---|---|---|---|---|---|
| 1 | June 2014 | 249 | −2.2 | 2.5 | 2.9 |
| February 2015 | 249 | −1.1 | 1.7 | 2.3 | |
| 2 | June 2014 | 292 | −1.2 | 1.6 | 2.1 |
| February 2015 | 292 | −0.9 | 1.9 | 3.0 | |
| 3 | June 2014 | 298 | −2.1 | 2.2 | 2.6 |
| February 2015 | 298 | −0.3 | 1.5 | 2.2 | |
| 4 | June 2014 | 278 | −1.7 | 2.6 | 3.4 |
| February 2015 | 278 | −1.7 | 2.5 | 4.8 | |
| 5 | June 2014 | 285 | 0.4 | 2.4 | 3.0 |
| February 2015 | 285 | 0.7 | 3.1 | 3.7 | |
| 6 | June 2014 | 255 | −2.5 | 2.6 | 3.1 |
| February 2015 | 255 | −1.7 | 2.0 | 2.4 | |
| All | June 2014 | 1657 | −1.5 | 2.3 | 2.9 |
| February 2015 | 1657 | −0.8 | 2.1 | 3.2 |
| Plot | Sample n | Mean Erosion Bridge Change (cm) | Absolute Mean Erosion Bridge Change (cm) | Mean DTM Change (cm) | Absolute Mean DTM Change (cm) | Erosion Bridge Change Minus DTM Change (cm) | Standard Deviation (cm) | Absolute Erosion Bridge Change Minus DTM Change (cm) | Change Difference RMSE (cm) | 95% Confidence Interval (cm) | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Lower | Upper | ||||||||||
| 1 | 249 | 0.3 | 0.5 | −0.7 | 1.9 | 1.0 | 2.4 | 2.0 | 2.6 | −3.6 | 5.8 |
| 2 | 292 | 0.5 | 0.7 | 0.2 | 1.4 | 0.2 | 2.4 | 1.6 | 2.4 | −4.4 | 5.0 |
| 3 | 298 | 0.8 | 1.0 | −0.8 | 1.5 | 1.7 | 1.9 | 2.1 | 2.6 | −2.0 | 5.5 |
| 4 | 278 | −0.1 | 1.1 | −0.1 | 1.9 | 0.0 | 4.4 | 2.3 | 4.4 | −8.8 | 8.6 |
| 5 | 285 | 0.4 | 0.7 | 0.0 | 1.3 | 0.3 | 2.1 | 1.6 | 2.2 | −3.9 | 4.6 |
| 6 | 255 | 0.6 | 0.7 | −0.1 | 1.6 | 0.8 | 2.1 | 1.9 | 2.2 | −3.4 | 5.0 |
| All | 1657 | 0.4 | 0.8 | −0.2 | 1.6 | 0.7 | 2.7 | 1.9 | 2.8 | −4.7 | 6.1 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gillan, J.K.; Karl, J.W.; Elaksher, A.; Duniway, M.C. Fine-Resolution Repeat Topographic Surveying of Dryland Landscapes Using UAS-Based Structure-from-Motion Photogrammetry: Assessing Accuracy and Precision against Traditional Ground-Based Erosion Measurements. Remote Sens. 2017, 9, 437. https://doi.org/10.3390/rs9050437
Gillan JK, Karl JW, Elaksher A, Duniway MC. Fine-Resolution Repeat Topographic Surveying of Dryland Landscapes Using UAS-Based Structure-from-Motion Photogrammetry: Assessing Accuracy and Precision against Traditional Ground-Based Erosion Measurements. Remote Sensing. 2017; 9(5):437. https://doi.org/10.3390/rs9050437
Chicago/Turabian StyleGillan, Jeffrey K., Jason W. Karl, Ahmed Elaksher, and Michael C. Duniway. 2017. "Fine-Resolution Repeat Topographic Surveying of Dryland Landscapes Using UAS-Based Structure-from-Motion Photogrammetry: Assessing Accuracy and Precision against Traditional Ground-Based Erosion Measurements" Remote Sensing 9, no. 5: 437. https://doi.org/10.3390/rs9050437