Three-Dimensional Autofocusing Visual Feedback for Automated Rare Cells Sorting in Fluorescence Microscopy

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Planar Locating
2.1.1. Scalable Correlation Coefficient Matching
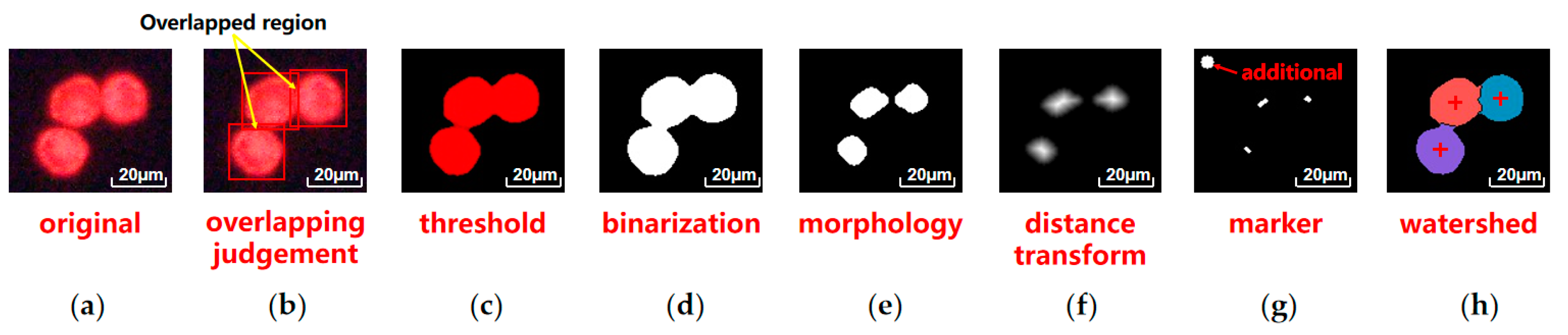
2.1.2. Watershed Algorithm Based Instance Segmentation
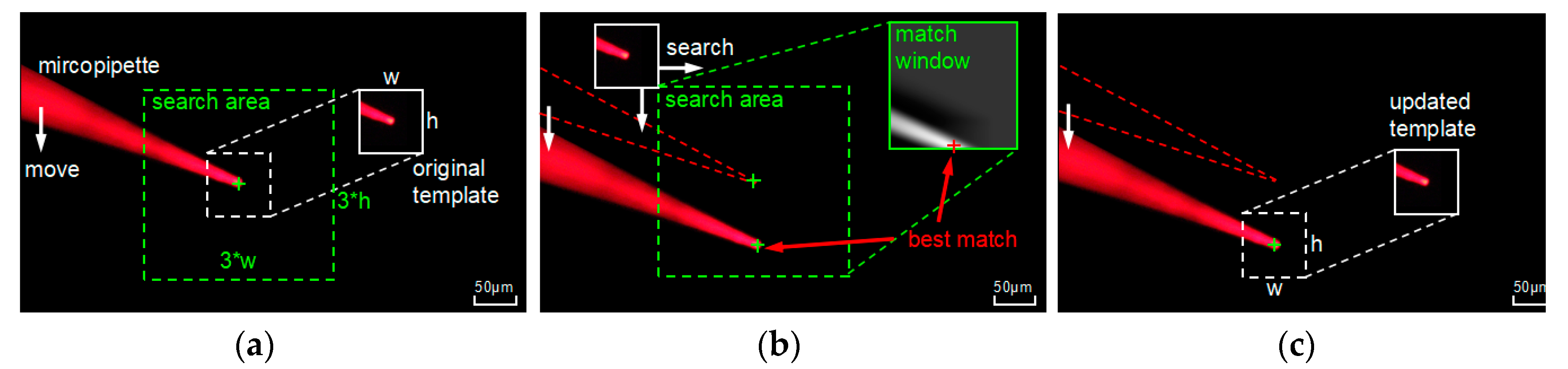
2.1.3. Neighborhood Searching Based Micropipette Tracking
2.2. Depth Detection
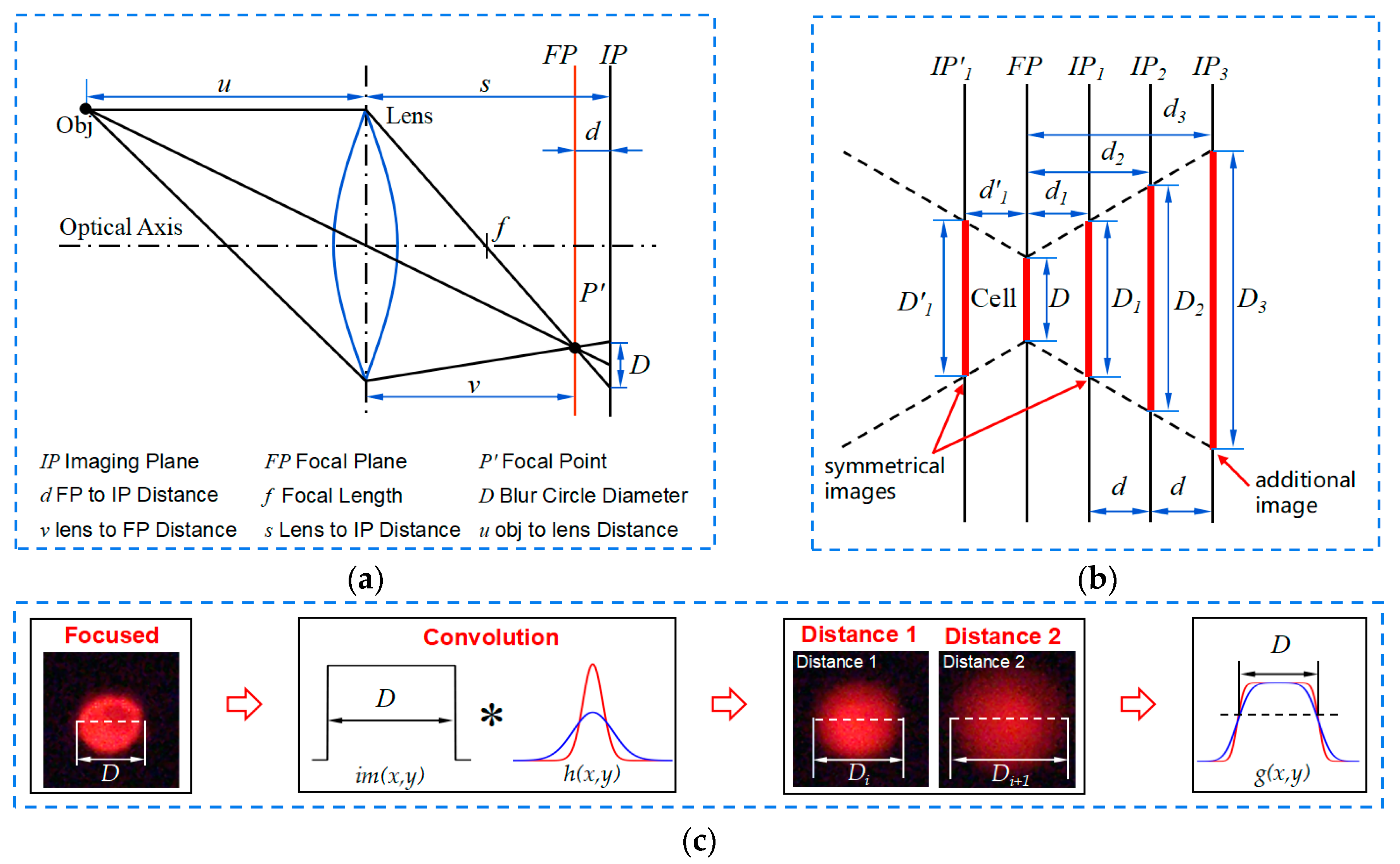
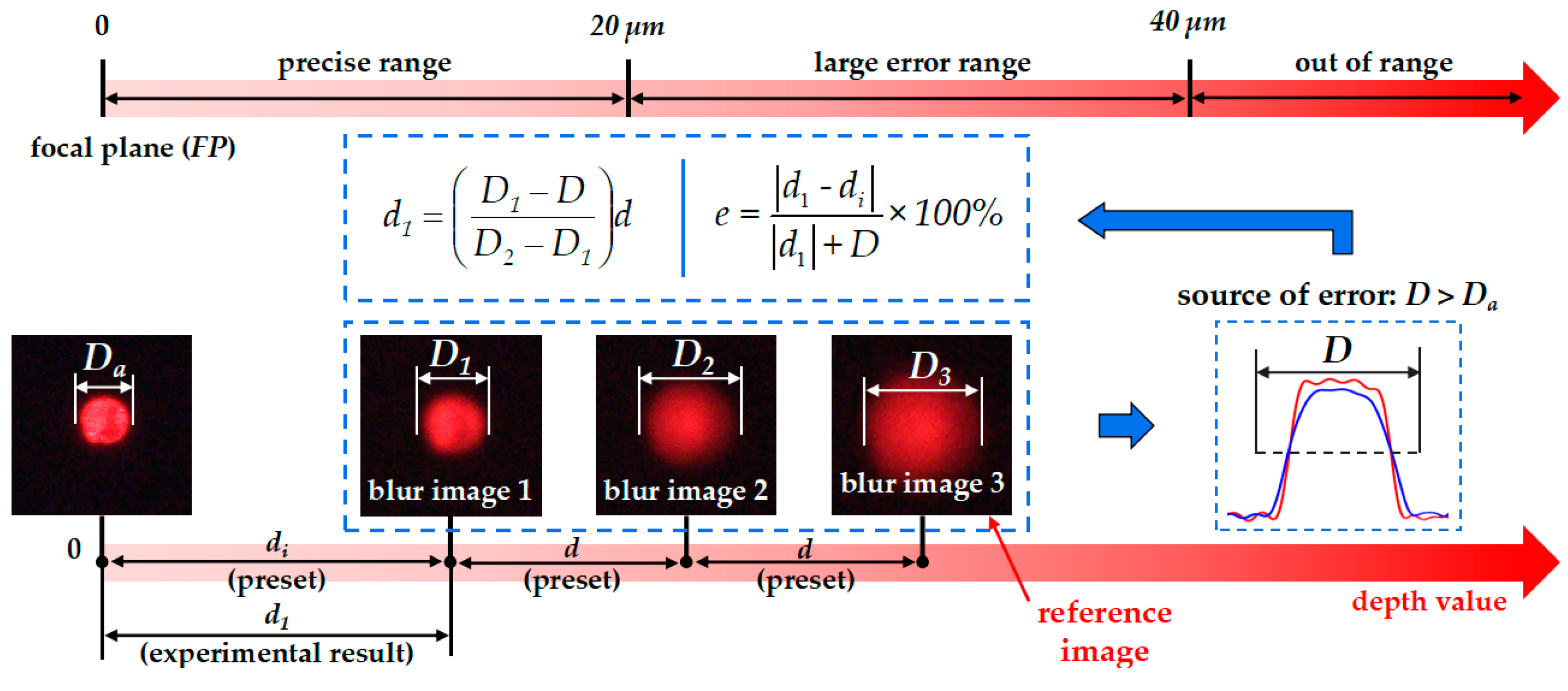
2.2.1. Imaging Model of Multiple Depth from Defocus (MDFD)
2.2.2. Algorithm Strategy of Multiple Depth from Defocus (MDFD)
3. Results and Discussion
3.1. Experimental Setup
3.1.1. System Framework
3.1.2. Experiment Preparation
3.2. Planar Locating and Tracking
3.2.1. Planar Locating
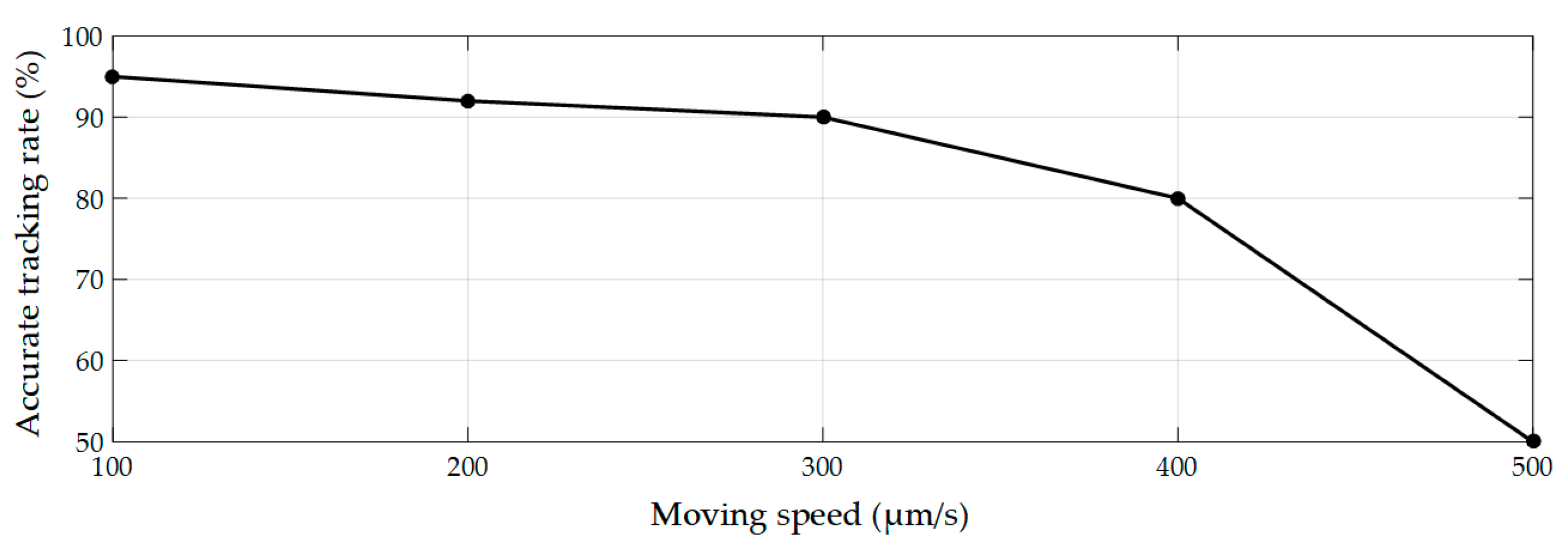
3.2.2. Micropipette Tip Tracking
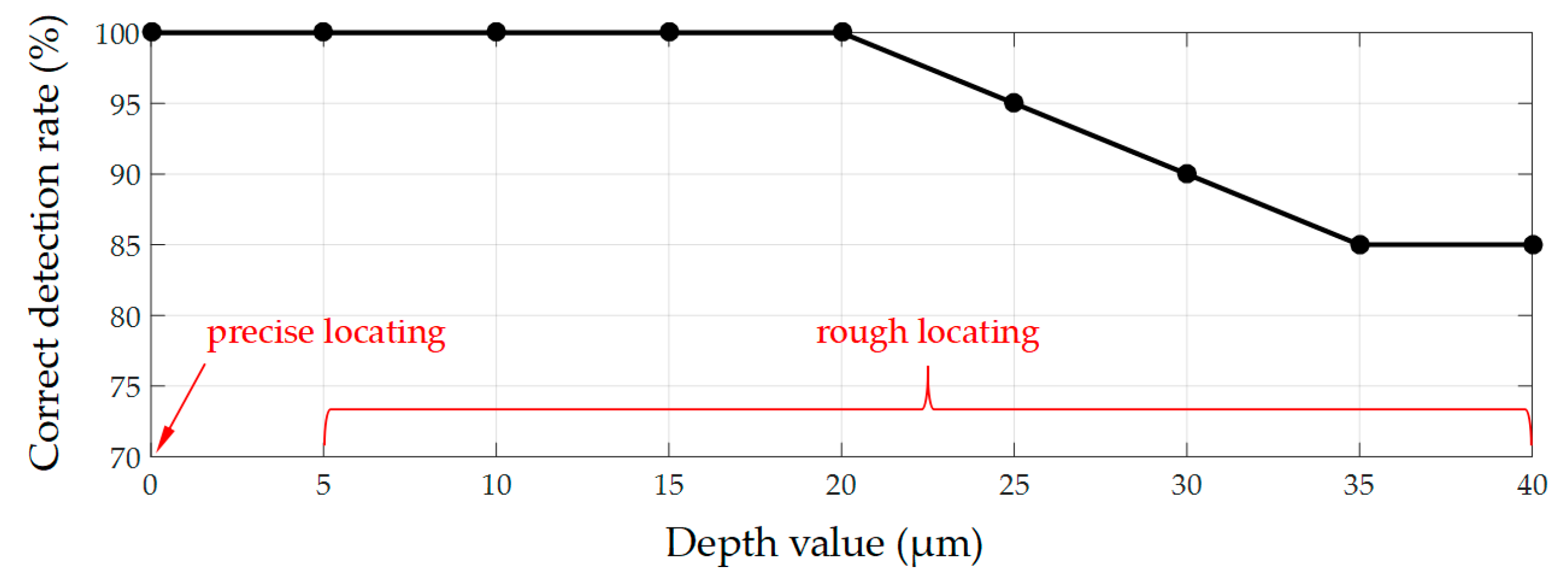
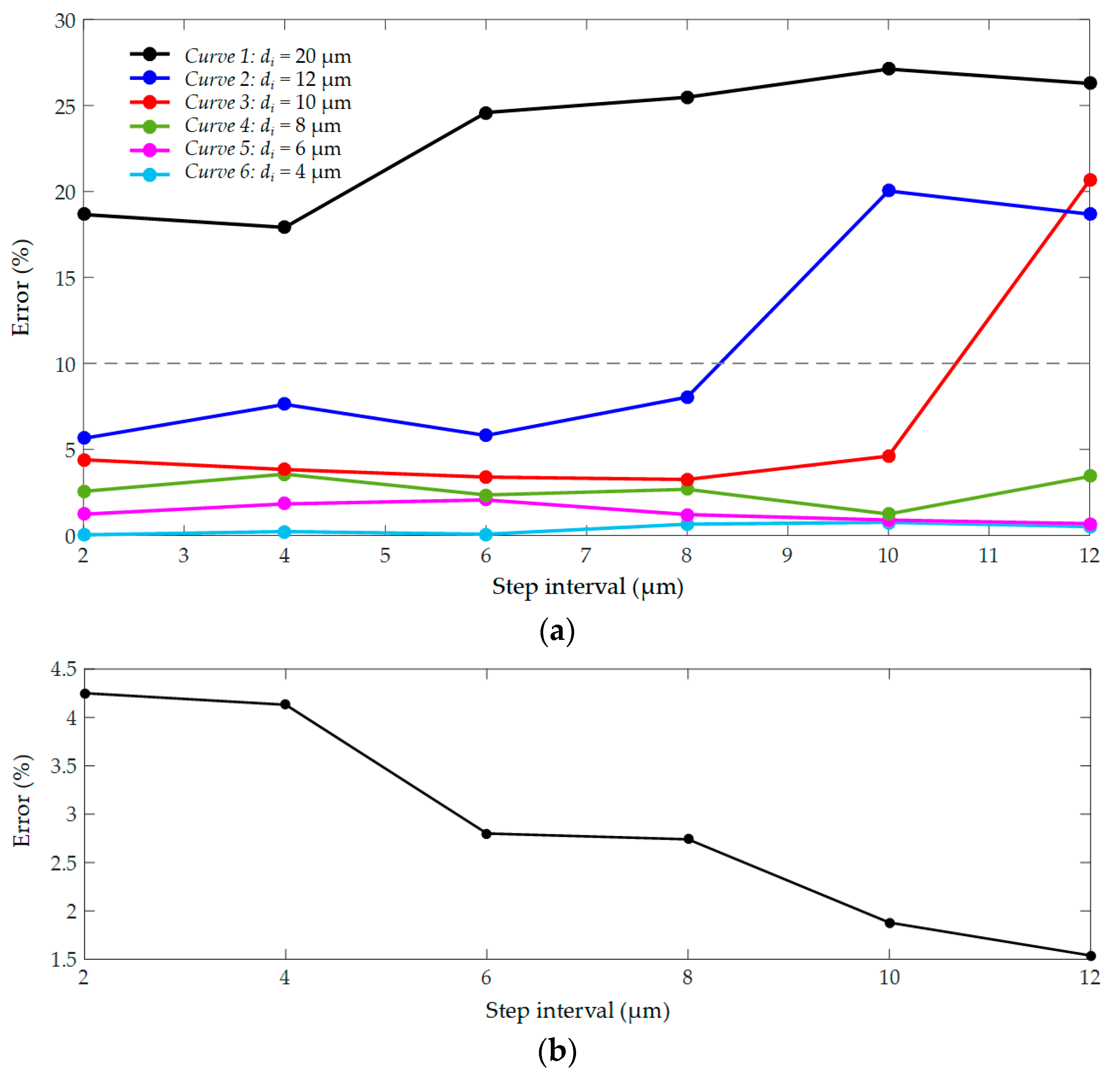
3.3. Depth Detection with Multiple Depth from Defocus (MDFD)
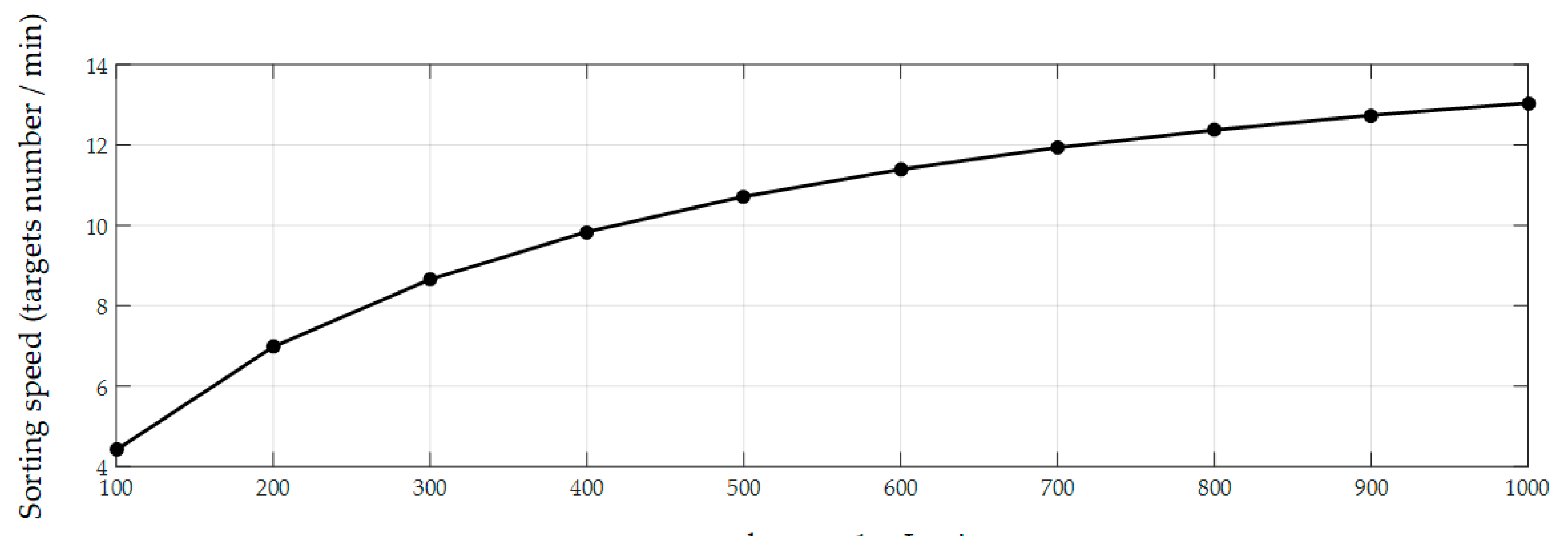
3.4. Automated Fast Autofocusing Visual Feedback (FAVF) Cell Sorting
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Dharmasiri, U.; Witek, M.A.; Adams, A.A.; Soper, S.A. Microsystems for the capture of low-abundance cells udara dharmasiri. Annu. Rev. Anal. Chem. 2010, 3, 409–431. [Google Scholar] [CrossRef] [PubMed]
- Hayes, D.F.; Cristofanilli, M.; Budd, G.T.; Ellis, M.J.; Stopeck, A.; Miller, M.C.; Matera, J.; Allard, W.J.; Doyle, G.V.; Terstappen, L.W.W.M. Circulating tumor cells at each follow-up time point during therapy of metastatic breast cancer patients predict progression-free and overall survival. Clin. Cancer Res. 2006, 12, 4218–4224. [Google Scholar] [CrossRef] [PubMed]
- Shields, C.W.; Reyes, C.D.; López, G.P. Microfluidic cell sorting: A review of the advances in the separation of cells from debulking to rare cell isolation. Lab Chip 2015, 15, 1230–1249. [Google Scholar] [CrossRef] [PubMed]
- Cristofanilli, M. The “microscopic” revolution in breast carcinoma: Are we ready to change clinical practice? Cancer 2005, 103, 877–880. [Google Scholar] [CrossRef] [PubMed]
- Paterlini-Brechot, P.; Benali, N.L. Circulating tumor cells (CTC) detection: Clinical impact and future directions. Cancer 2007, 253, 180–204. [Google Scholar] [CrossRef] [PubMed]
- Chin, L.; Andersen, J.N.; Futreal, P.A. Cancer genomics: from discovery science to personalized medicine. Nat. Med. 2011, 17, 297–303. [Google Scholar] [CrossRef] [PubMed]
- Helo, P.; Cronin, A.M.; Danila, D.C.; Wenske, S. Circulating prostate tumor cells detected by reverse transcription-PCR in men with localized or castration-refractory prostate cancer: concordance with CellSearch assay and association with bone metastases and with survival. Clin. Chem. 2009, 55, 765–773. [Google Scholar] [CrossRef] [PubMed]
- Iacone, A.; Quaglietta, A.M.; D’Antonio, D.; Accorsi, P.; Dragani, A. Density gradient separation of hematopoietic stem cells in autologous bone marrow transplantation. Haematologica 1991, 76, 18–21. [Google Scholar] [PubMed]
- Hulett, H.R.; Bonner, W.A.; Barrett, J.; Herzenberg, L.A. Cell sorting: automated separation of mammalian cells as a function of intracellular fluorescence. Science 1969, 166, 747–749. [Google Scholar] [CrossRef]
- Gossett, D.R.; Weaver, W.M.; Mach, A.J.; Hur, S.C.; Tse, H.T.; Lee, W.; Amini, H.; Carlo, D.D. Label-free cell separation and sorting in microfluidic systems. Anal. Bioanal. Chem. 2010, 397, 3249–3267. [Google Scholar] [CrossRef] [Green Version]
- Allard, W.J.; Matera, J.; Miller, M.C.; Repollet, M.; Connelly, M.C. Tumor cells circulate in theperipheral blood of all major carcinomas but not in healthy subjects or patients with nonmalignant diseases. Clin. Cancer Res. 2004, 10, 6897–6904. [Google Scholar] [CrossRef] [PubMed]
- Erb, R.M.; Son, H.S.; Samanta, B.; Rotello, V.M.; Yellen, B.B. Magnetic assembly of colloidal superstructures with multipole symmetry. Nature 2009, 457, 999–1002. [Google Scholar] [CrossRef] [PubMed]
- Tasoglu, S.; Diller, E.; Guven, S.; Sitti, M.; Demirci, U. Untethered micro-robotic coding of three-dimensional material composition. Nat. Commun. 2014, 5, 3124. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Ishii, K.S.; Ohta, A.T. Micro-assembly using optically controlled bubble microrobots. Appl. Phys. Lett. 2011, 99, 094103. [Google Scholar] [CrossRef]
- Chu, H.K.; Huan, Z.; Mills, J.K.; Yang, J.; Sun, D. Threedimensional cell manipulation and patterning using dielectrophoresis via a multi-layer scaffold structure. Lab Chip 2015, 15, 920–930. [Google Scholar] [CrossRef] [PubMed]
- Vanherberghen, B.; Manneberg, O.; Christakou, A.; Frisk, T.; Ohlin, M.; Hertz, H.M.; Onfelt, B.; Wiklund, M. Ultrasoundcontrolled cell aggregation in a multi-well chip. Lab Chip 2010, 10, 2727–2732. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.M.; Tu, E.; Raymond, D.E.; Yang, J.M.; Zhang, H.; Hagen, N.; Dees, B.; Mercer, E.M.; Forster, A.H.; Kariv, I.; et al. Microflfluidic sorting of mammalian cells by optical force switching. Nat. Biotechnol. 2005, 23, 83–87. [Google Scholar] [CrossRef] [PubMed]
- Pereiro, I.; Bendali, A.; Tabnaoui, S.; Alexandre, L.; Srbova, J.; Bilkova, Z.; Deegan, S.; Joshi, L.; Viovy, f.J.; Malaquin, L.; et al. A new microfluidic approach for the one-step capture, amplification and label-free quantification of bacteria from raw samples. Chem. Sci. 2017, 8, 1329–1336. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Feng, C.; Ang, W.T.; Tan, S.Y.M.; Latt, W.T. Autofocusing and polar body detection in automated cell manipulation. IEEE Trans. Biomed. Eng. 2017, 64, 1099–1105. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.P.; Leung, C.; Lu, Z.; Esfandiari, N.; Casper, R.F.; Sun, Y. Controlled aspiration and positioning of biological cells in a micropipette. IEEE Trans. Biomed. Eng. 2012, 59, 1032–1040. [Google Scholar] [CrossRef] [PubMed]
- Avci, M.E.; Ohara, K.; Nguyen, C.; Theeravithayangkura, C.; Kojima, M.; Tanikawa, T.; Mae, Y.; Arai, T. High-speed automated manipulation of microobjects using a two-fingered. IEEE Trans. Ind. Electron. 2015, 62, 1070–1079. [Google Scholar] [CrossRef]
- Liu, X.Y.; Fernandes, R.; Gertsenstein, M. Automated microinjection of recombinant BCL-X into mouse zygotes enhances embryo development. PLoS ONE 2011, 6, e21687. [Google Scholar] [CrossRef] [PubMed]
- Xu, Q.S. Design of a large-stroke bistable mechanism for the application in constant-force micropositioning stage. J. Mech. Robot. 2016, 9, 11006. [Google Scholar] [CrossRef]
- Dario, P.; Fukuda, T.; Sitti, M. Preface to the journal of micro-nano mechatronics. J. Micro Nano Mechatron. 2008, 4, 1. [Google Scholar] [CrossRef]
- Shen, Y.J.; Nakajima, M.; Zhang, Z.H.; Fukuda, T. Dynamic force characterization microscopy based on integrated nanorobotic AFM and SEM system for detachment process study. IEEE-ASME Trans. Mechatron. 2015, 20, 3009–3017. [Google Scholar] [CrossRef]
- Huang, H.W.; Uslu, F.E.; Katsamba, P.; Lauga, E.; Sakar, M.S.; Nelson, B.J. Adaptive locomotion of artificial microswimmers. Sci. Adv. 2019, 5, eaau1532. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ouyang, P.R.; Zhang, W.J.; Gupta, M.M.; Zhao, W. Overview of the development of a visual based automated bio-micromanipulation system. Mechatronics 2007, 17, 578–588. [Google Scholar] [CrossRef]
- Ungai-Salánki, R.; Gerecsei, T.; Fürjes, P.; Orgovan, N.; Sándor, N.; Holczer, E.G.; Horvath, R.; Szabó, B. Automated single cell isolation from suspension with computer vision. Sci. Rep. 2016, 6, 20375. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mulligan, J. Fast calibrated stereo vision for manipulation. Real time Imaging 1997, 3, 331–341. [Google Scholar] [CrossRef]
- Li, K.; Wang, Q.; Wu, J.; Yu, H.; Zhang, D. Calibration error for dual-camera digital image correlation at microscale. Opt. Lasers Eng. 2012, 50, 971–975. [Google Scholar] [CrossRef]
- Weigel, A.; Sebesta, A.; Kukura, P. A variant of yellow fluorescent protein with fast and efficient maturation for cell-biological applications. Nat. Biotechnol. 2002, 20, 87–90. [Google Scholar]
- Sednev, M.V.; Belov, V.N.; Hell, S.W. Fluorescent dyes with large stokes shifts for super-resolution optical microscopy of biological objects: A review. Methods Appl. Fluoresc. 2015, 3, 42004. [Google Scholar] [CrossRef] [PubMed]
- Berezin, M.Y.; Achilefu, S. Fluorescence lifetime measurements and biological imaging. Chem. Rev. 2010, 110, 2641. [Google Scholar] [CrossRef] [PubMed]
- Schechner, Y.Y.; Kiryati, N. Depth from defocus vs. stereo: how different really are they? Int. Conf. Pattern Recognit. 1988, 39, 141–162. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Depth di | e at d of 2 µm | e at d of 4 µm | e at d of 6 µm | e at d of 8 µm | e at d of 10 µm | e at d of 12 µm |
|---|---|---|---|---|---|---|
| 4 µm | 0.03% | 0.22% | 0.07% | 0.65% | 0.76% | 0.51% |
| 6 µm | 1.23% | 1.83% | 2.06% | 1.21% | 0.89% | 0.68% |
| 8 µm | 2.56% | 3.56% | 2.68% | 2.35% | 1.24% | 3.43% |
| 10 µm | 4.40% | 3.83% | 3.39% | 3.25% | 4.61% | 20.65% |
| 12 µm | 5.64% | 7.62% | 5.81% | 6.23% | 20.03% | 18.68% |
| 16 µm | 7.26% | 7.74% | 21.56% | 23.42% | 20.58% | 23.44% |
| 18 µm | 8.65% | 23.64% | 23.78% | 21.56% | 23.68% | 23.81% |
| 20 µm | 18.66% | 17.91% | 24.59% | 25.48% | 27.12% | 26.28% |
| 24 µm | 17.59% | 16.23% | 15.52% | 11.07% | 18.65% | 18.39% |
| 30 µm | 27.58% | 27.54% | 27.17% | 27.26% | 28.96% | OOR |
| 32 µm | 20.54% | 23.44% | 18.65% | 16.63% | OOR | OOR |
| 36 µm | 23.33% | 22.84% | OOR | OOR | OOR | OOR |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Bai, K.; Cui, J.; Shi, Q.; Sun, T.; Huang, Q.; Dario, P.; Fukuda, T. Three-Dimensional Autofocusing Visual Feedback for Automated Rare Cells Sorting in Fluorescence Microscopy. Micromachines 2019, 10, 567. https://doi.org/10.3390/mi10090567
Wang H, Bai K, Cui J, Shi Q, Sun T, Huang Q, Dario P, Fukuda T. Three-Dimensional Autofocusing Visual Feedback for Automated Rare Cells Sorting in Fluorescence Microscopy. Micromachines. 2019; 10(9):567. https://doi.org/10.3390/mi10090567
Chicago/Turabian StyleWang, Huaping, Kailun Bai, Juan Cui, Qing Shi, Tao Sun, Qiang Huang, Paolo Dario, and Toshio Fukuda. 2019. "Three-Dimensional Autofocusing Visual Feedback for Automated Rare Cells Sorting in Fluorescence Microscopy" Micromachines 10, no. 9: 567. https://doi.org/10.3390/mi10090567