3.1. Amplitude Analysis and Correlation
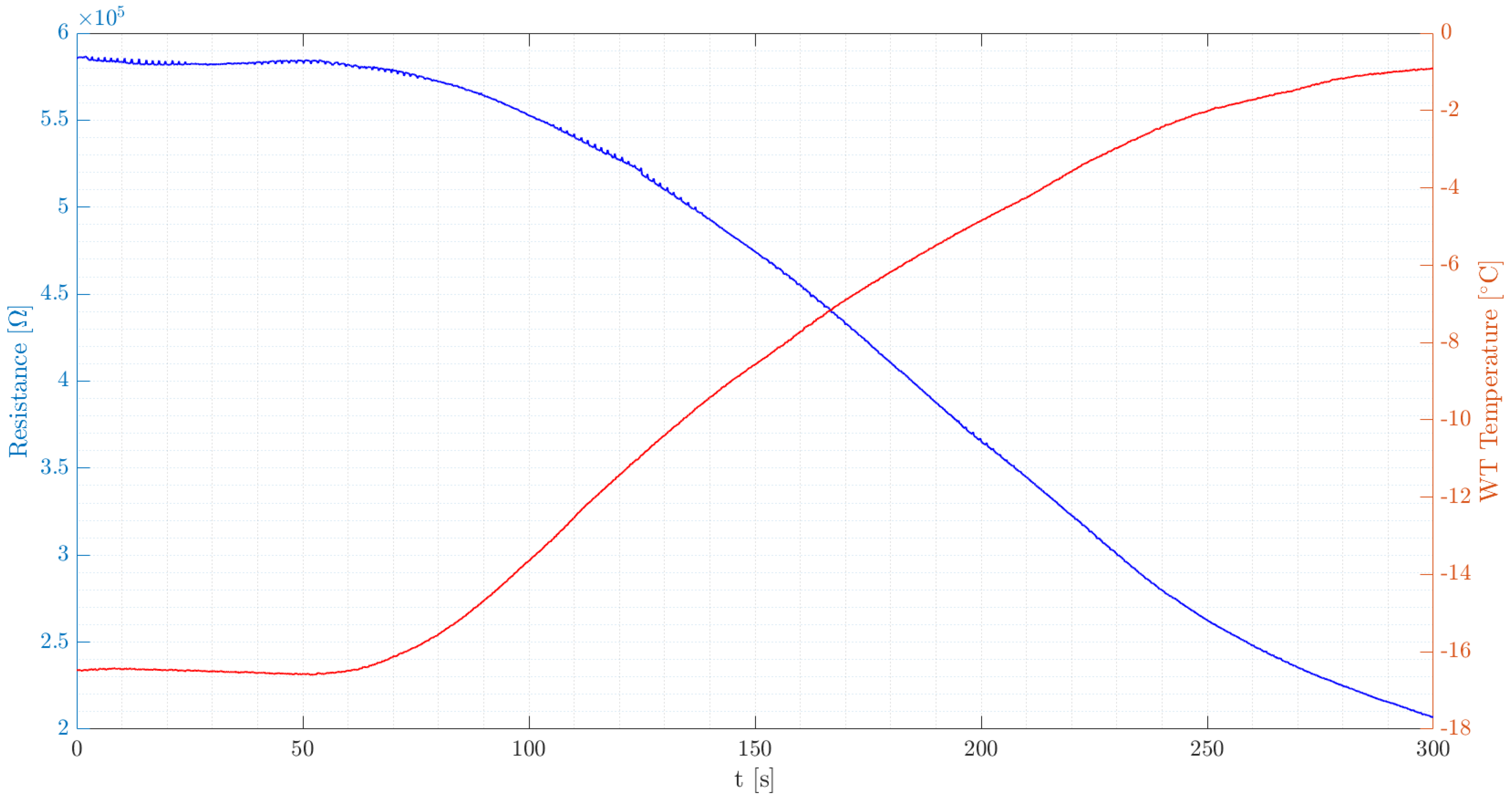
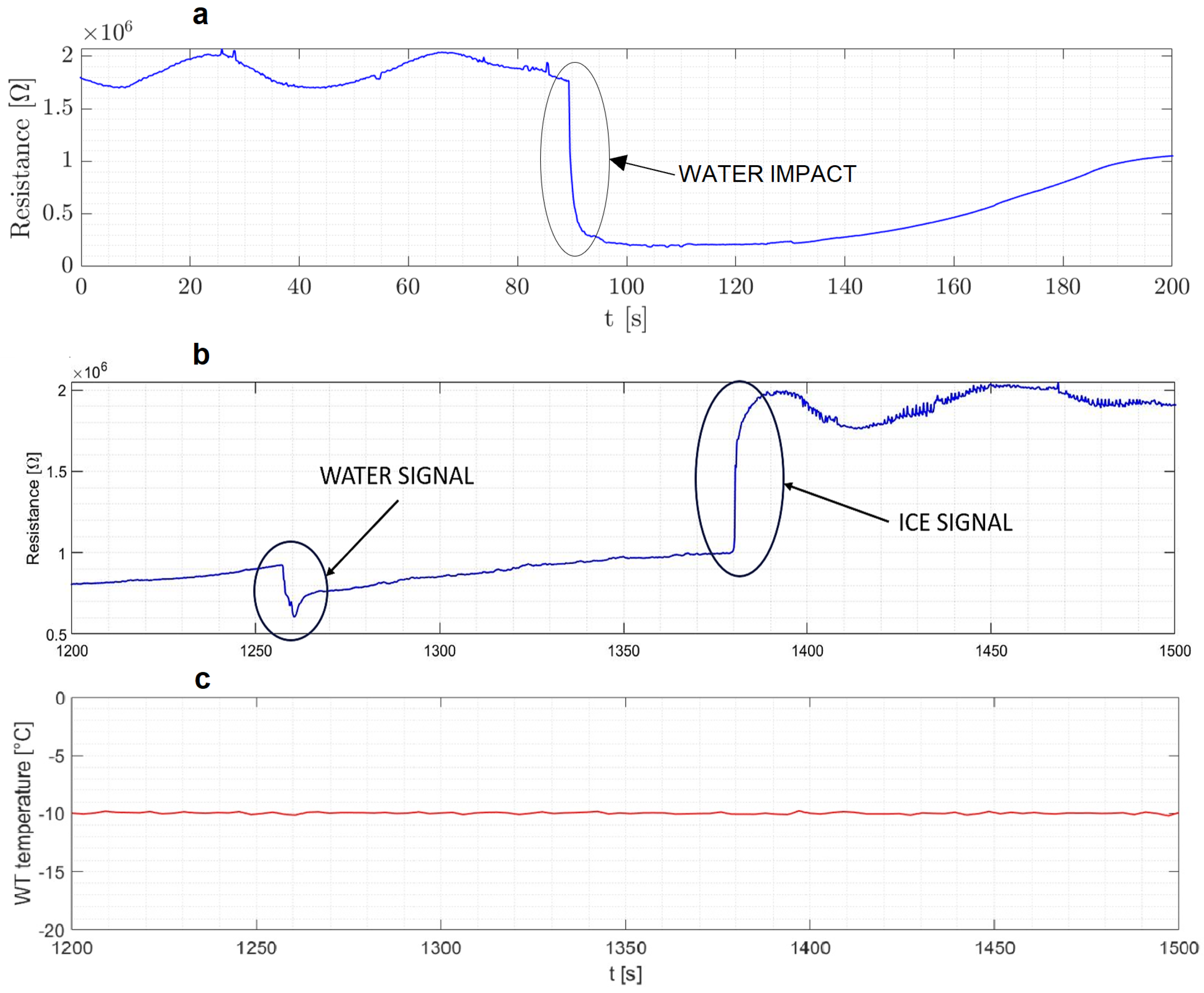
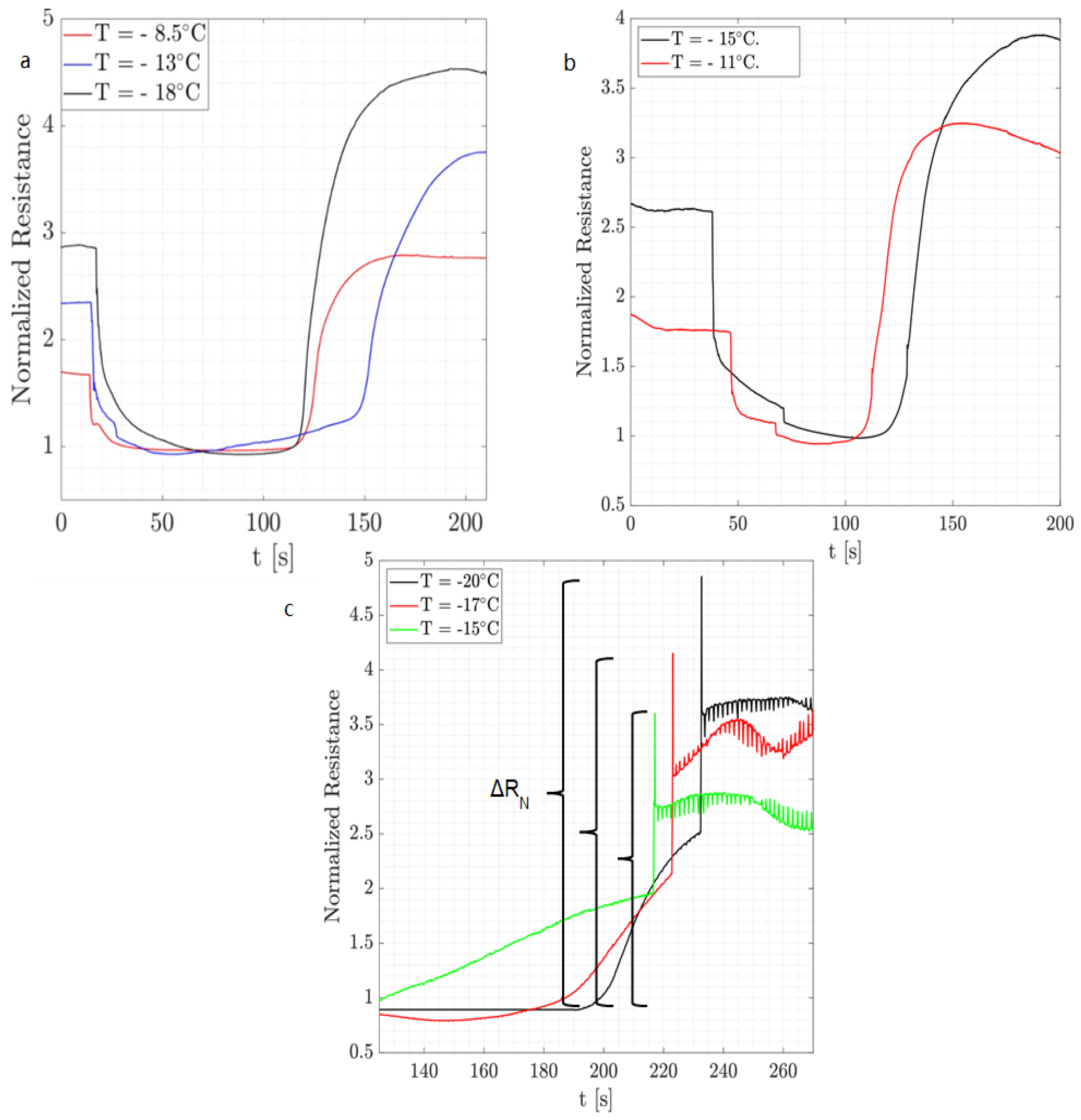
In this study, we performed an in-depth analysis of the resistance signal variations due to ice formation on an airfoil surface during wind tunnel experiments. These dynamic tests built upon the static conditions described earlier in the text, but involved a sequence of water injection, ice accumulation under variable airflow conditions and a melting phase to reset for subsequent tests. The detector’s internal resistance exhibited an increase when ice formed, establishing a direct link between resistance changes and the water’s phase transition. Normalization of resistance signals was employed to mitigate variations inherent to individual detectors, utilizing the initial resistance value prior to the injection system’s activation for baseline establishment. This approach facilitated coherent comparisons across different test conditions. In the characterization tests, we saw that when a water droplet hits the sensor element, the resistance drops sharply, while during ice formation, the resistance increases. This trend remained consistent across varying air temperatures and injection parameters, with the amplitude of ice signals becoming more pronounced as the ambient air temperature decreased. Thus, the normalization for the water detection,
, is defined as the minimum resistance value,
, with respect to the initial one,
, while that for ice formation,
, is defined as maximum resistance,
, with respect to the initial one:
The amplitude of the ice signal,
, can be of interest and is given by
Table 4 and
Table 5 present the parameters used in the text.
Table 5 concisely summarizes the testing conditions for evaluating the ice detection sensor. It details experiments conducted across a range of airspeeds (20 to 60 m/s), air temperatures (−20 °C to 10 °C) and water droplet sizes (30 and 300 μm), with the number of experiments varying from 28 to 115 per condition set. The parameters for our experiments airspeeds from 20 to 60 m/s, air temperatures between −20 °C and 10 °C, and water droplet sizes of 30 and 300
m—were chosen to mirror typical conditions during an airplane’s takeoff and initial climb. The selected droplet sizes are indicative of those encountered in ice-subposed environments like low-altitude clouds, ensuring our study’s relevance to real-world aviation scenarios. This table reflects the sensor’s comprehensive evaluation under diverse and realistic atmospheric conditions, ensuring a robust assessment of its performance and reliability.
Table 5 outlines specific parameters for a subset of ice detection sensor experiments. It provides detailed insights into tests conducted at various airspeeds (20 to 60 m/s), corresponding Mach numbers (0.06 to 0.19), total air temperatures (TAT) ranging from −5 °C to −20 °C, a consistent median volume diameter (MVD) for water droplets at 30
m and varying injection times (5 to 30 s). This matrix showcases the sensor’s examination under controlled conditions, highlighting its performance in response to changes in speed, temperature and duration of water exposure.
3.1.1. Effect of Temperature
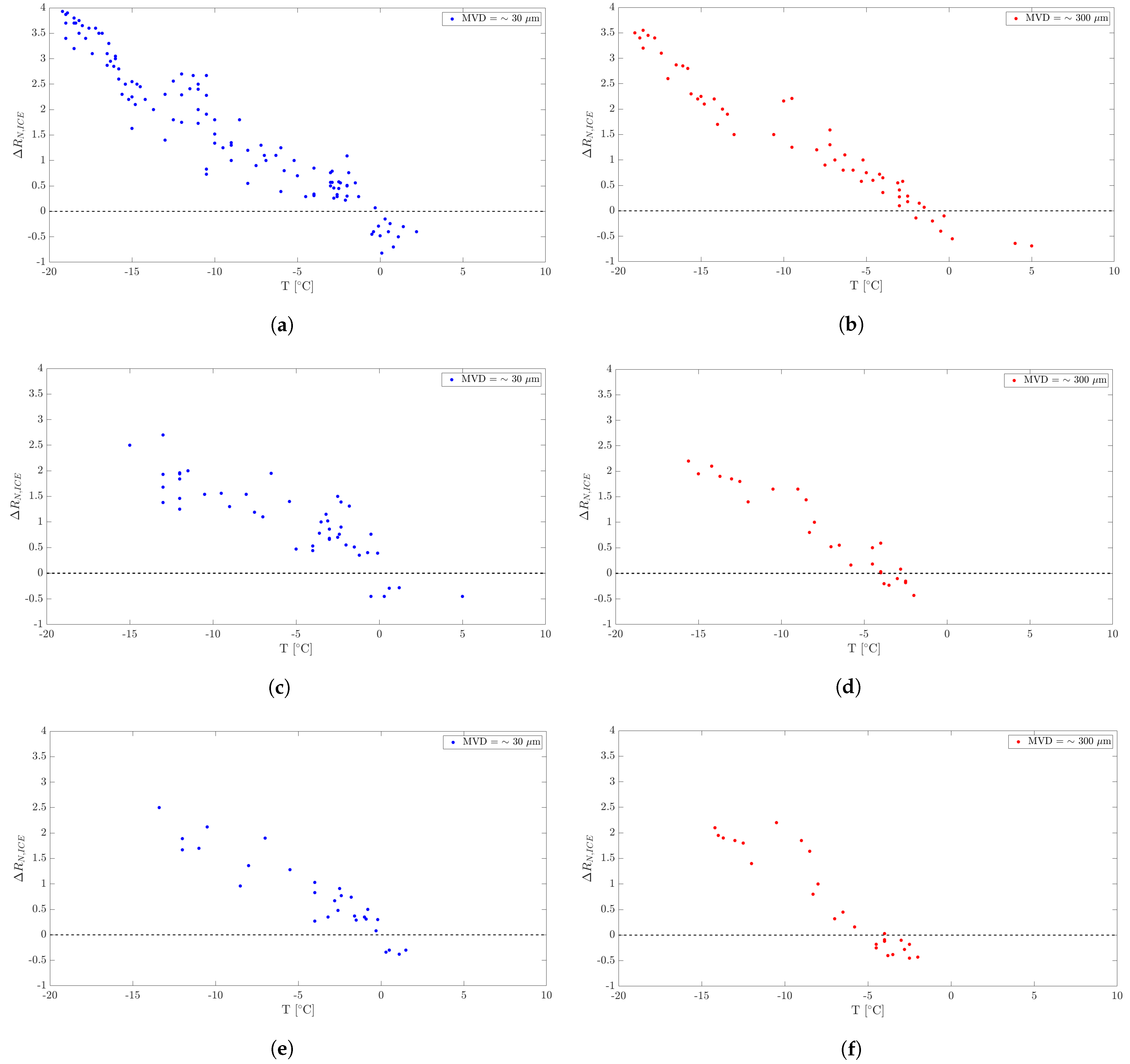
The major factor scrutinized is the effect of temperature on ice signals. Wind tunnel tests for this purpose were conducted with a constant airspeed, and the liquid water content and droplet dimensions were also maintained at constant levels. Experiments spanned a temperature range from −20 °C to 5 °C, with results portrayed on maps using spot markers. These maps represent the normalized ice signal amplitudes at specific temperatures for air velocities of 20 m/s, 30 m/s, 40 m/s and 60 m/s. Tests were conducted under fog (MVD = 30 µm, depicted by blue spots) and rain (MVD = 300 µm, shown by red spots) conditions. The dashed line on the maps segregates the regions where ice formation occurs (above the line) from the regions where it does not (below the line). According to Definition (
3), such regions underneath the dashed line are characterized by a negative value of the ice signal’s amplitude since
when ice formation does not take place. In fact, the maximum resistance (the maximum is taken after the resistance drop due to water impingement) in the case where no ice forms is lower than the initial one (resistance increase due to ice does not occur in that case).
Figure 6 depicts the wind tunnel tests focusing on the temperature’s effect at different airspeeds and under varied conditions.
Table 6,
Table 7 and
Table 8 provide a detailed comparison of amplitudes across different temperature ranges for various airspeeds under fog conditions.
It can be noticed from the maps in
Figure 6 that the ice signal amplitude amplifies as the air temperature decreases. This trend is consistent under both fog and rain conditions. Upon examining the amplitude values in
Table 6,
Table 7 and
Table 8, under fog conditions across different airspeeds, a noticeable pattern emerges relative to the temperature ranges. At an airspeed of 20 m/s, the amplitude’s responsiveness to temperature is very strong. As temperatures reduce to the coldest range, between −20 °C and −15 °C, amplitudes surge to their highest values. As the cold relents slightly, moving toward warmer ranges, the amplitudes curtail systematically. Interestingly, once temperatures edge beyond the freezing mark of −5 °C, the amplitudes exhibit potential reversals, hinting at complex ice–temperature dynamics. When the airspeed increases up to 40 m/s, the response is quite different. Although the trend is quite similar, we can see that the dispersion in the data is smaller than at lower air speeds, with the difference being noticeable at the lower temperature ranges. The values of the amplitudes, between −15 °C and −5 °C, show less variance with the mean value.
A possible explanation might be that a higher air speed results in a higher heat transfer by convection, which facilitates the freezing process of the droplets that are absorbed by the sensor. The smaller dispersion is even more visible (especially at the temperature range −15 °C and −10 °C) at the higher airspeed of 60 m/s. For more details, see
Appendix A,
Figure A3.
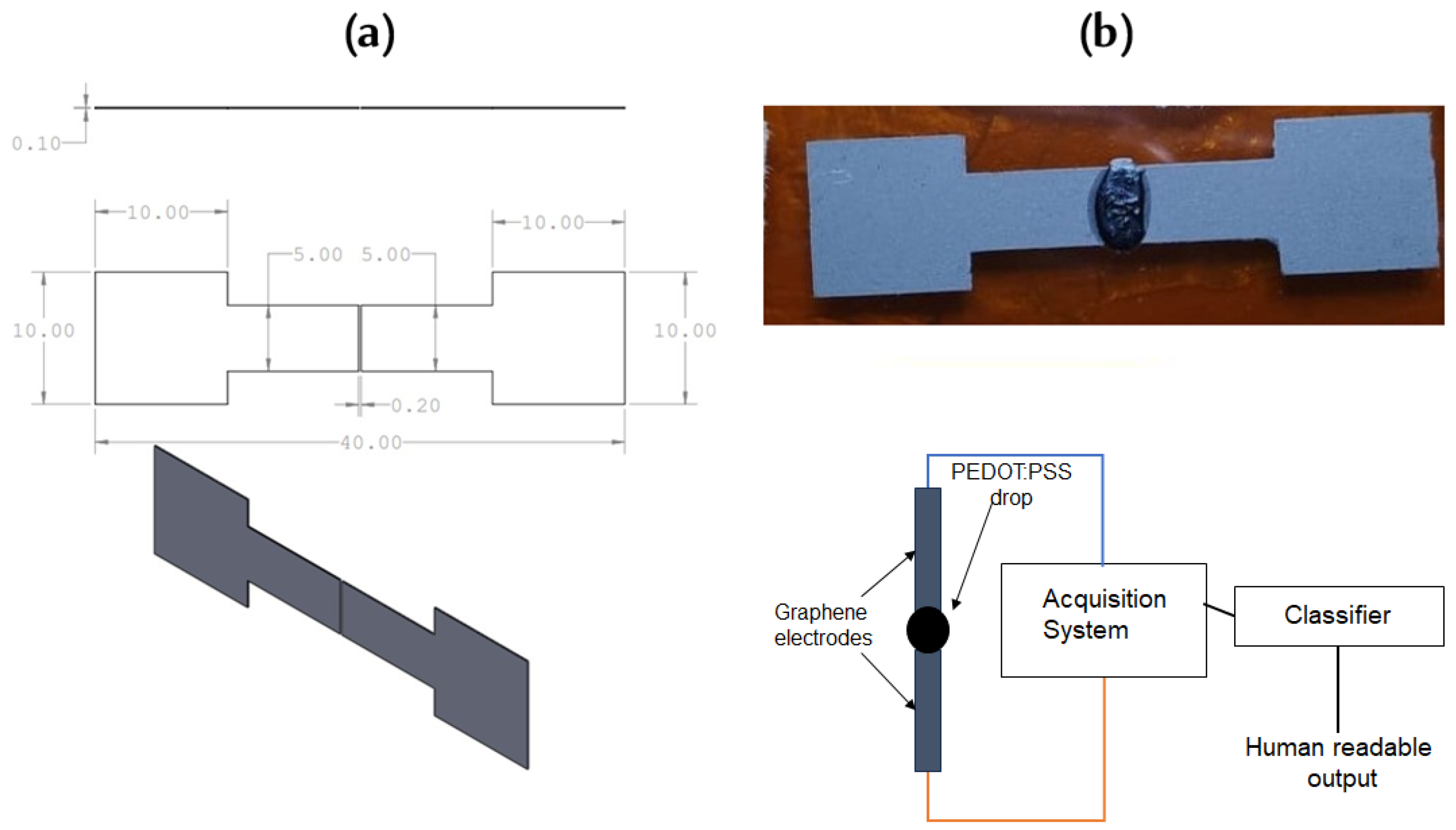
To differentiate between temperature changes and water adsorption effects on our sensor’s resistance, we propose employing a differential measurement setup with dual sensors, one of which is moisture-shielded, to isolate temperature effects. Additionally, we suggest integrating advanced data processing algorithms, potentially machine-learning-based, for pattern recognition and response differentiation. Further, exploring material optimization and environmental compensation through supplementary temperature and humidity sensors could aid in selectively distinguishing these effects. This approach aims to enhance the sensor’s specificity, necessitating further research for effective implementation.
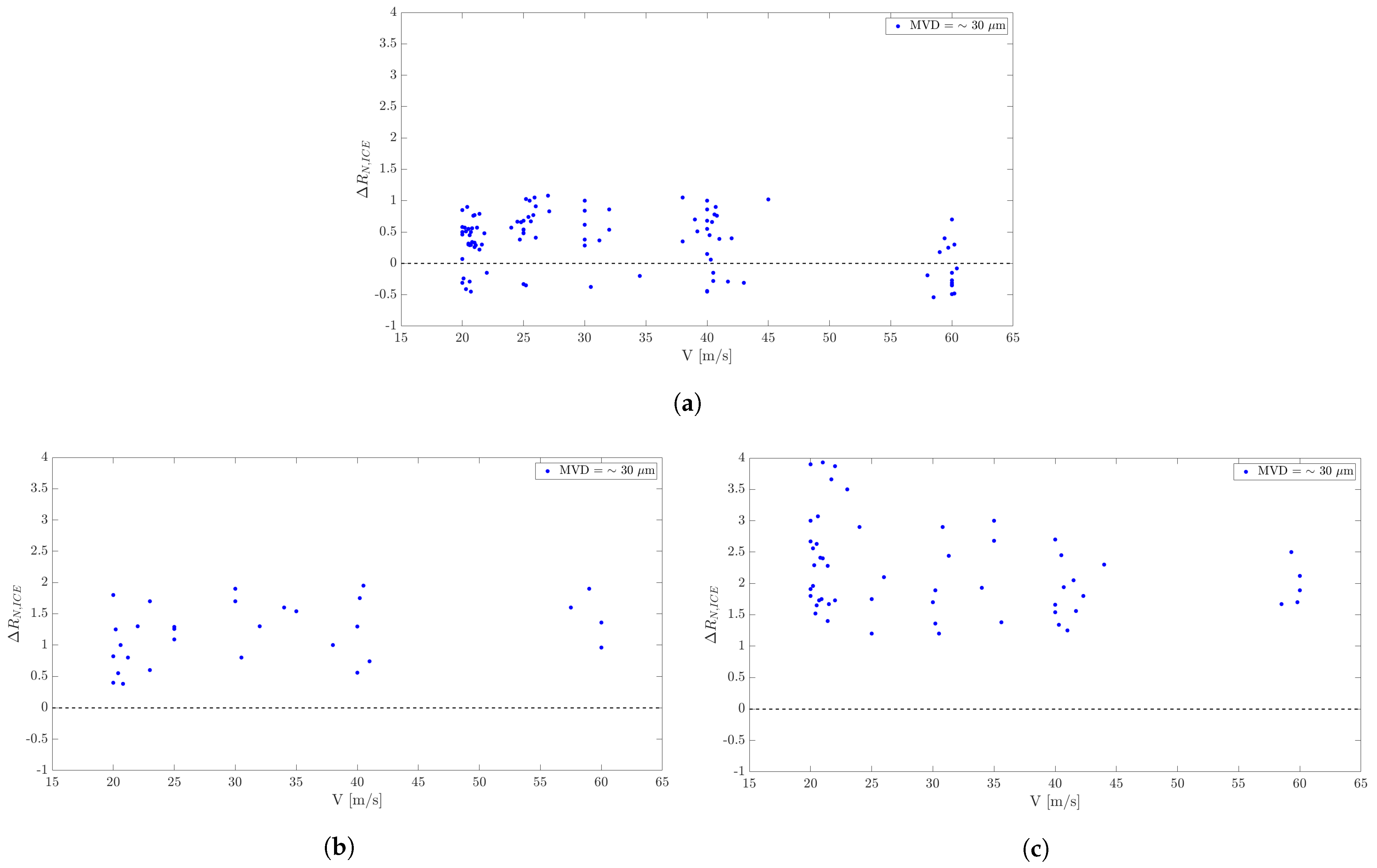
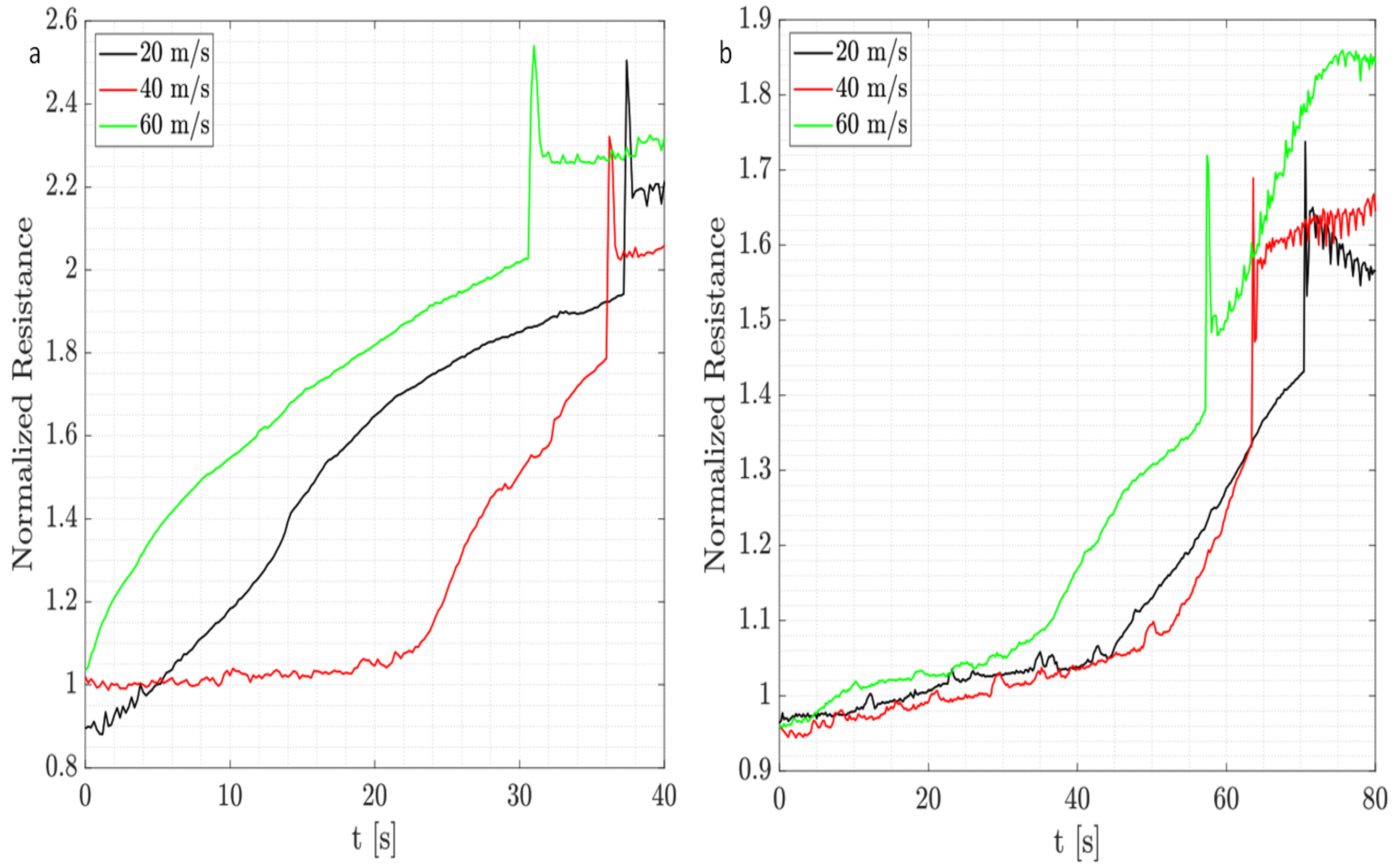
3.1.2. Effect of Airspeed
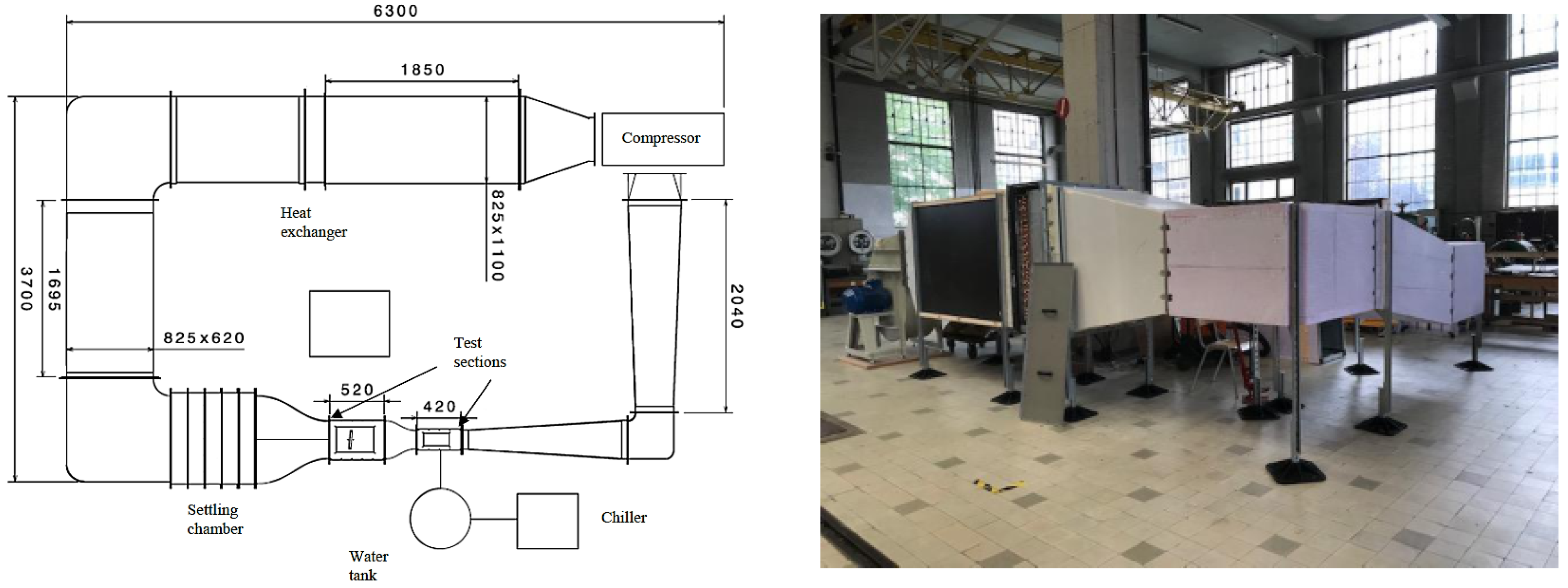
In this section, we investigate the impact of wind speed on the amplitude of ice signals. The wind tunnel allows us to adjust the air velocity by altering the rotation speed of the compressor.
The air speed appears to influence the amplitude at lower temperature ranges of the air, while at higher temperatures, its impact is non-significant. In the configuration of the wind tunnel, it appears that the air flow with temperatures higher than −10 °C does not contain sufficient convectional energy to influence the freezing process.
In combination with the previous observations, when varying the air temperature at constant airspeed, we can see that there is an interplay between, respectively, the effects of the airspeed and air temperature on the behavior of the amplitude. The effect of the temperature is visible at higher airspeeds, whereas the effect of the airspeed is visible at lower temperatures.
The increase in airspeed has two effects. The first is to enhance the kinetic energy of impacting droplets. As a result, more droplets tend to glide over the surface without gathering at the leading edge. This leads to fewer absorbed frozen droplets. The second effect is that when the temperature is low enough, the droplets, upon touching the sensor, tend to absorb and freeze more easily. In that case, a higher convection (higher airspeed) actually favors more ice formation due to enhanced heat transfer. Thus, a combination of high airspeed and low temperature favors more ice formation, which is clearly detected by the sensor, as shown by the measured resistance amplitudes of the sensor.
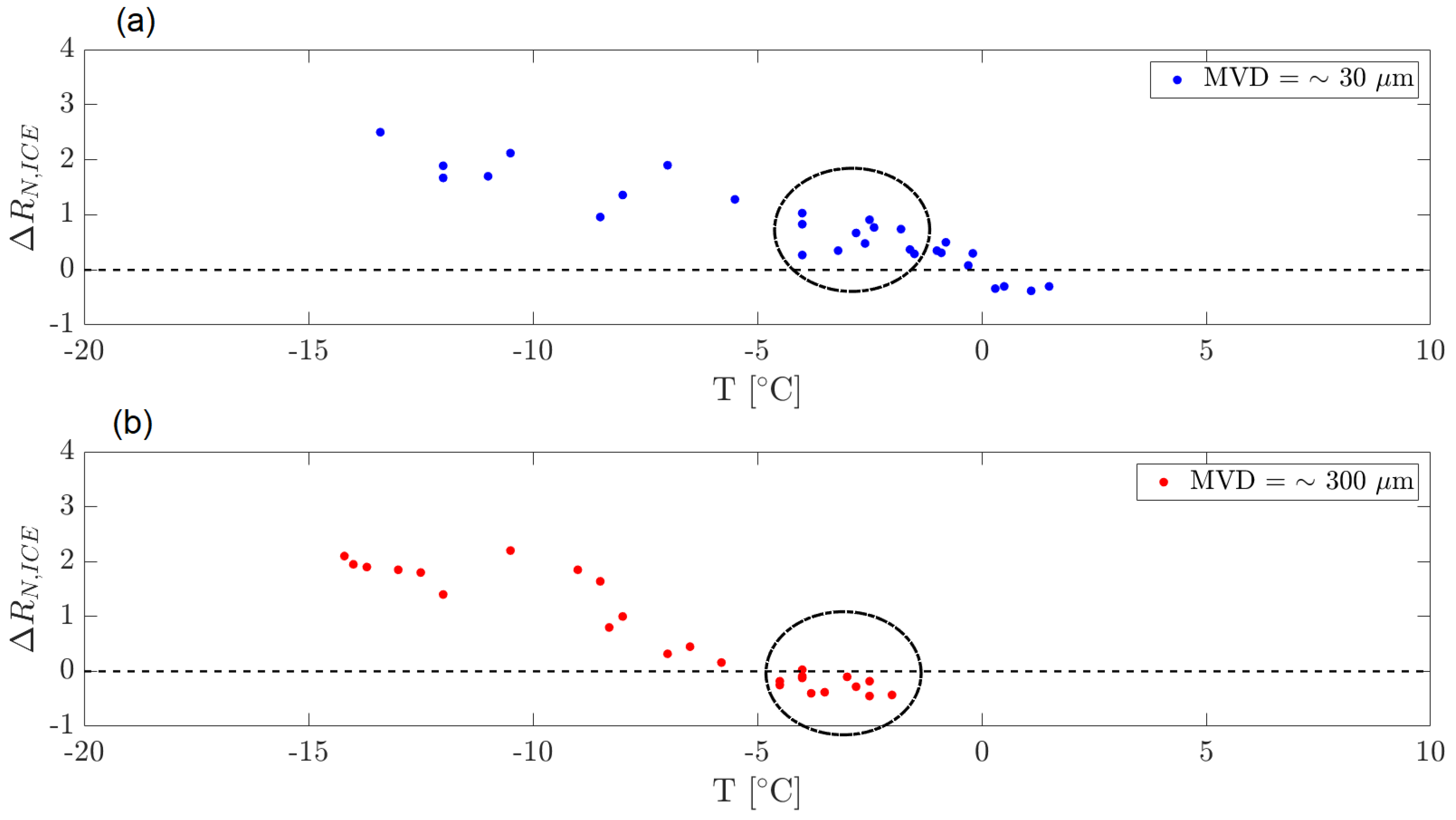
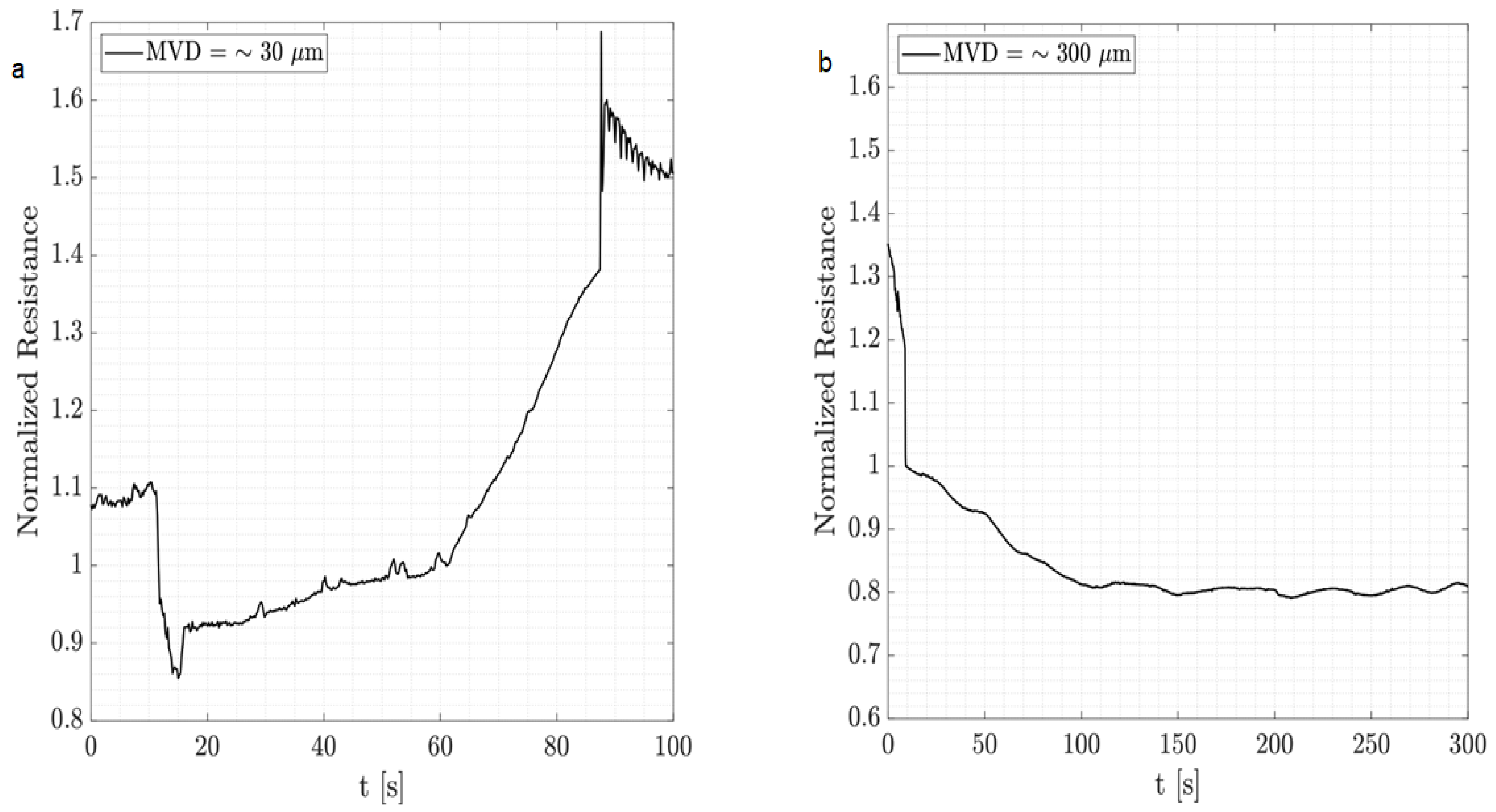
3.1.3. Effect of MVD
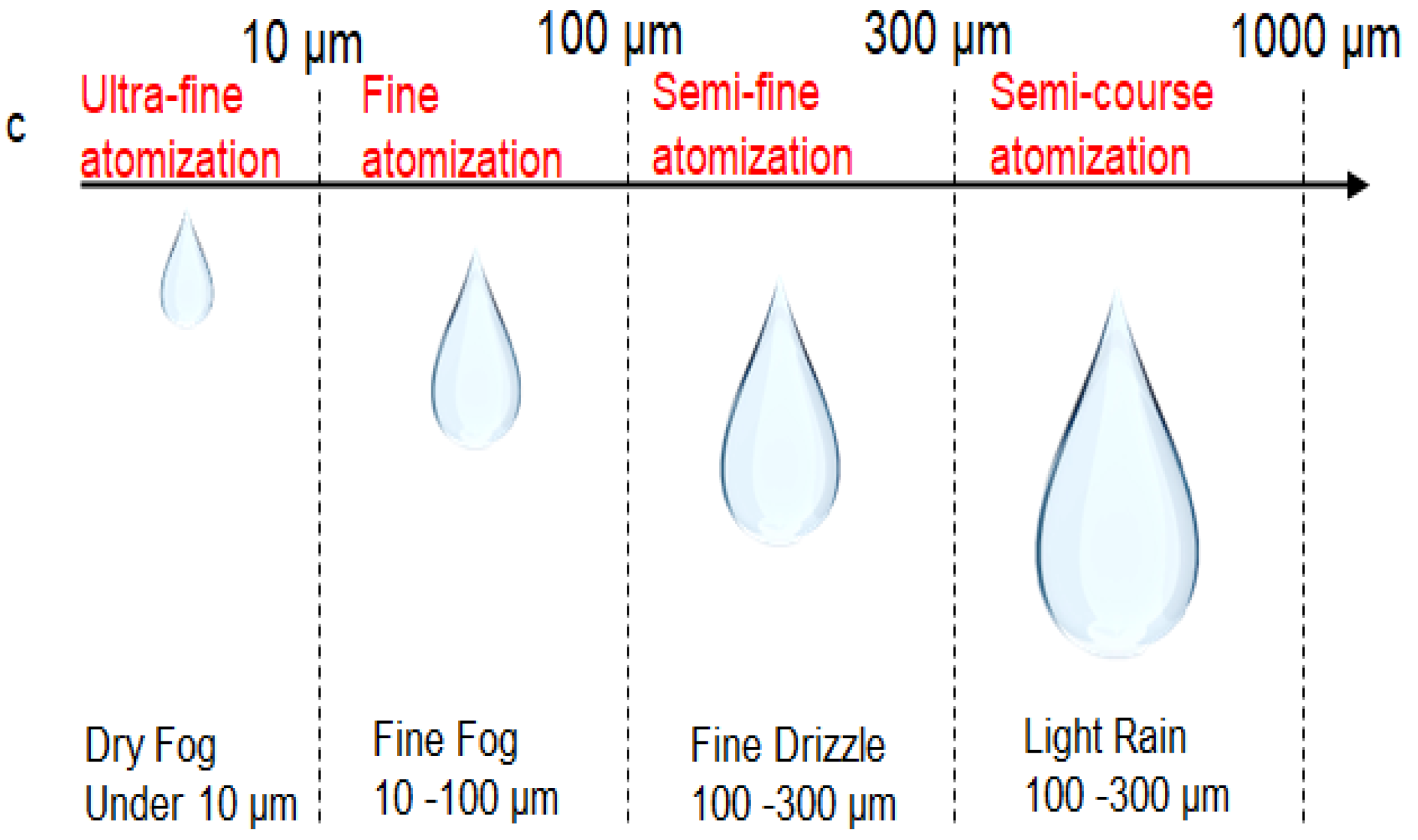
The quantity of liquid injected (LWC), the dimensions of the droplets (MVD) and the injection time are definitely responsible for ice detection effectiveness since the amount of water absorbed mainly depends on these parameters. The second parameter is discussed further in this paper, and two different cases are simulated depending on the orifice diameter of the nozzle chosen for the injection: very small droplets (MVD = ∼30
m) and large droplets (MVD = ∼300
m). The first case represents fog conditions, whereas the second case represents rain conditions.
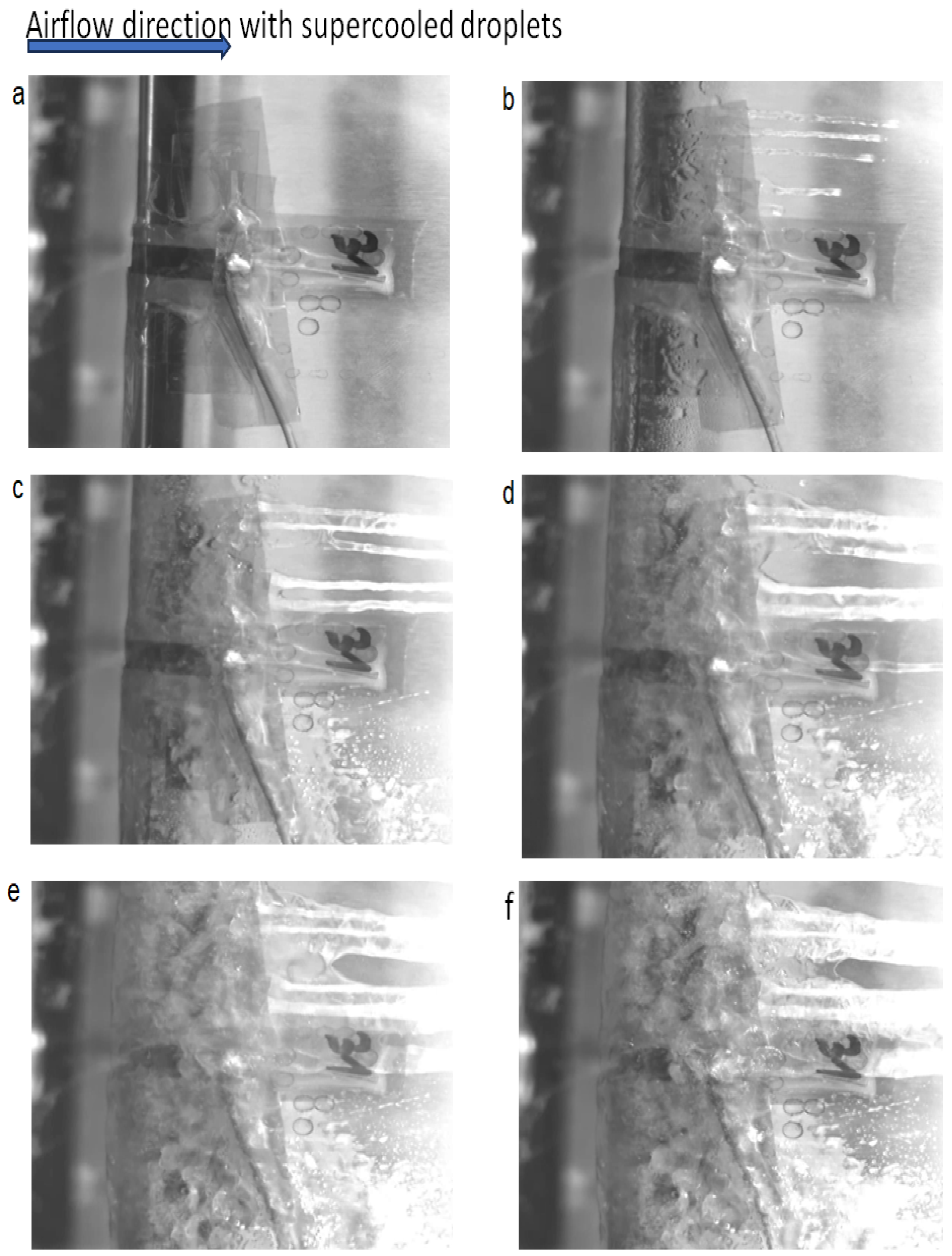
Figure 8 shows how the droplets’ dimensions influence the ice signal.
From the observations derived from the data represented in
Figure 8, it can be observed that when the temperature is not low enough, as in
Figure 8b, larger droplets are not able to freeze and run along the airfoil due to the airflow. This does not happen in fog conditions where droplets are small, and they manage to accumulate on the detector. Smaller droplets are also lighter, so they tend to follow the streamlines and assume the temperature of the air very quickly since the contact area is larger. Let us zoom further into this observation.
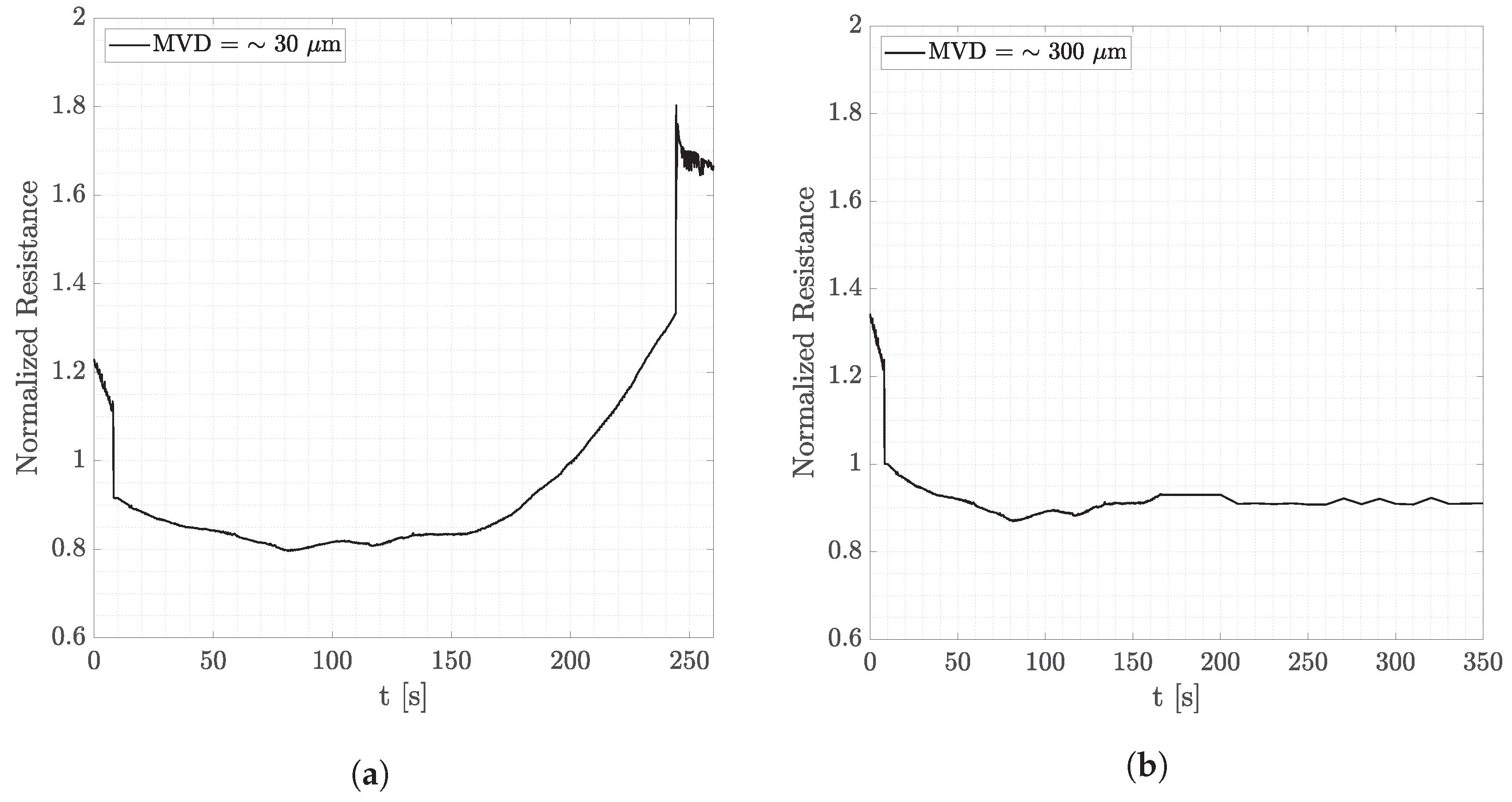
Figure 9 and
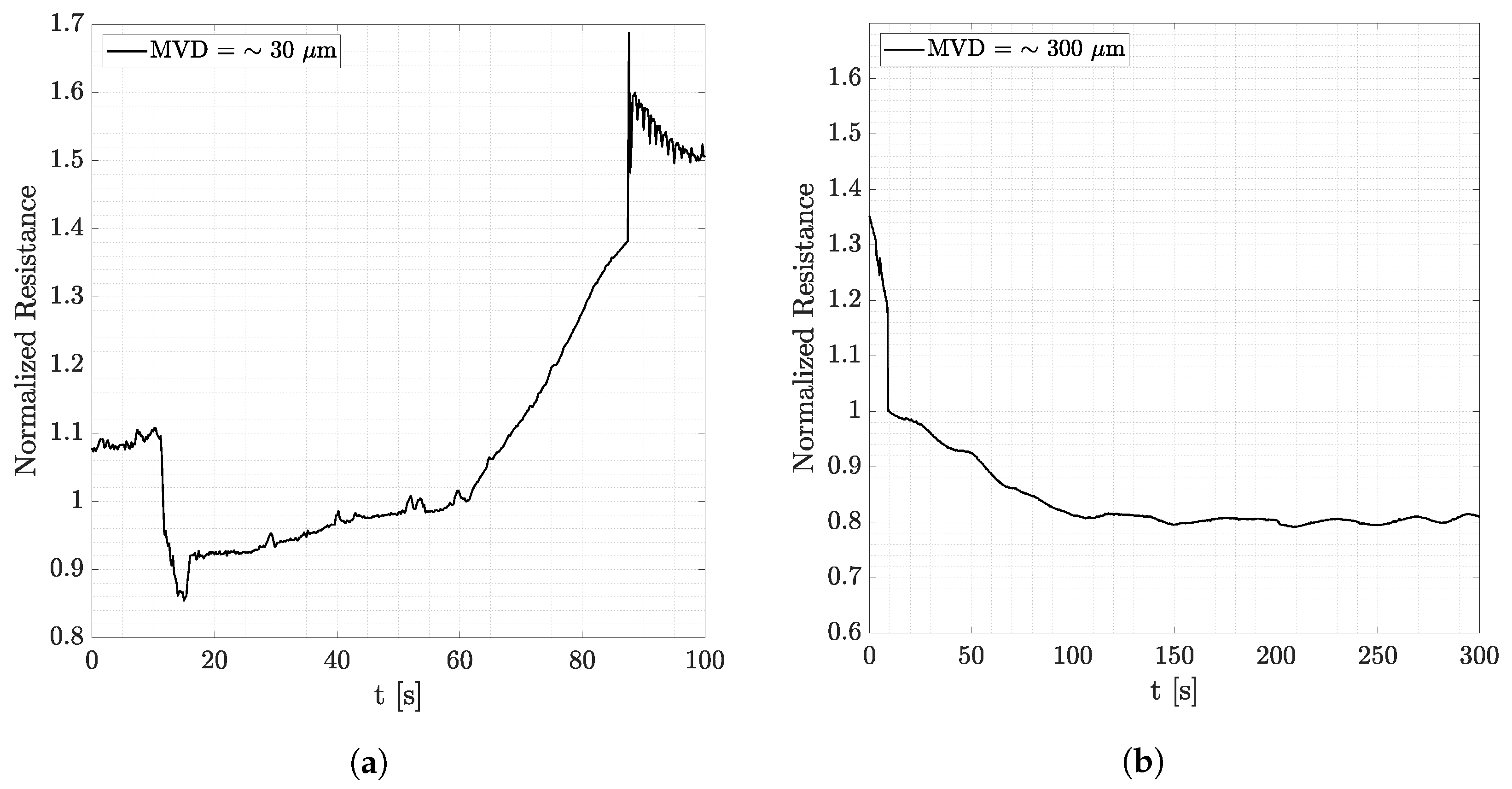
Figure 10 show signals of the resistance amplitudes at, respectively, two airspeeds, where each figure considers both fog and rain conditions. Signals reported in
Figure 9a,b are obtained at 60 m/s at an air temperature of −4 °C. In fog conditions, ice formation can occur (recognized by the steep increase in the resistance amplitude), whereas there is no ice signal after injection in rain conditions. As mentioned above, this is due to the large diameter of the droplets injected. In
Figure 10a,b, ice formation takes time since the temperature is higher, and water absorbed by the PEDOT:PSS does not immediately freeze. Nevertheless, the same observation can be made. While in fog conditions ice formation occurs, for droplets that have a larger volume, ice cannot form even after more than 5 min.
Finally, it appeared that the amplitude of the ice signal is linked to the amplitude of the water signal. The latter is proportional to the liquid water content being injected in the wind tunnel. Therefore, it has been observed that the bigger the decrease in the resistance at the injection (because of a larger amount of injected water), the bigger the increase in the resistance when ice formation occurs. For more details, see
Appendix A,
Figure A5.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}