
Rational Design of a Surface Acoustic Wave Device for Wearable Body Temperature Monitoring

 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
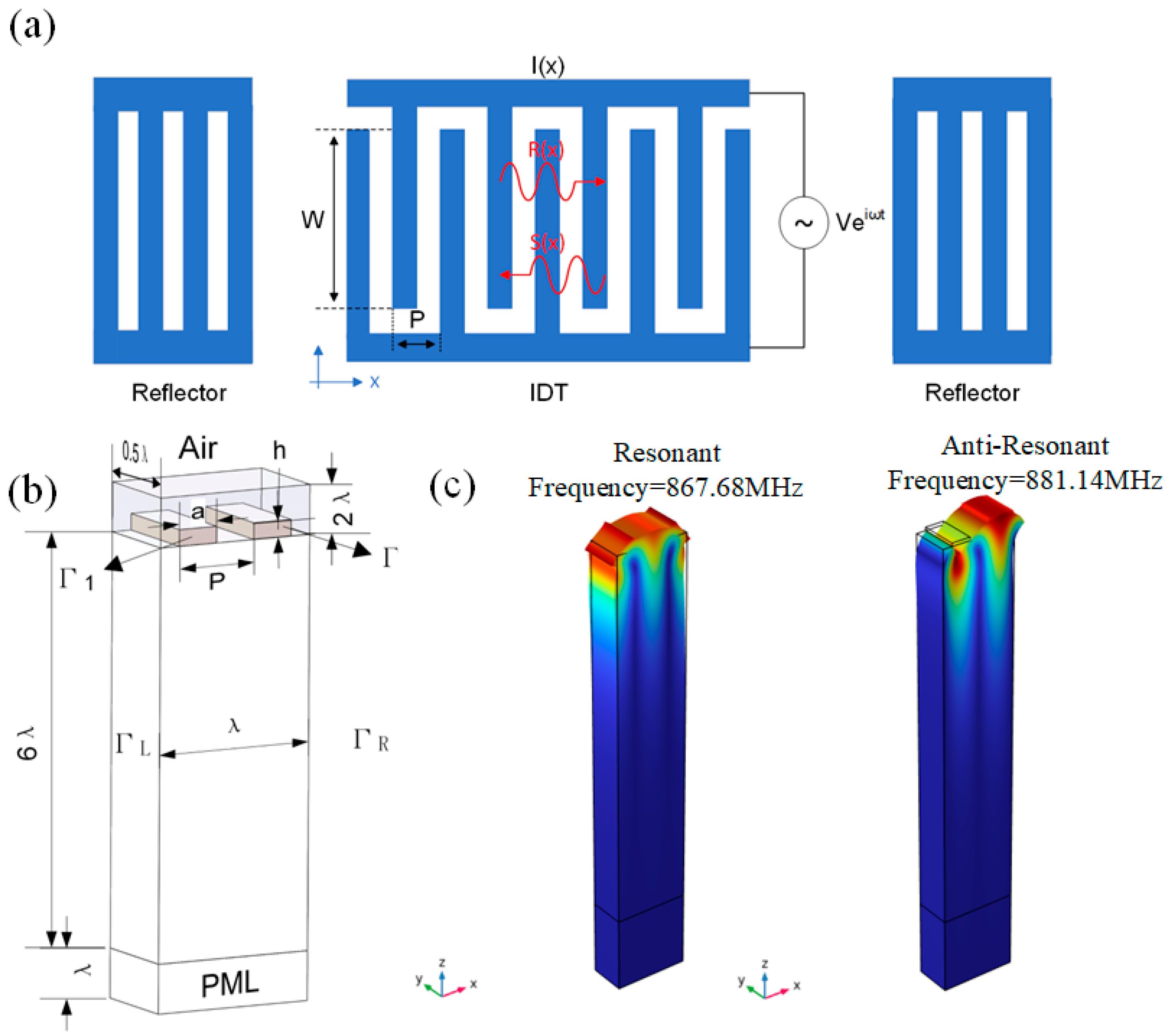
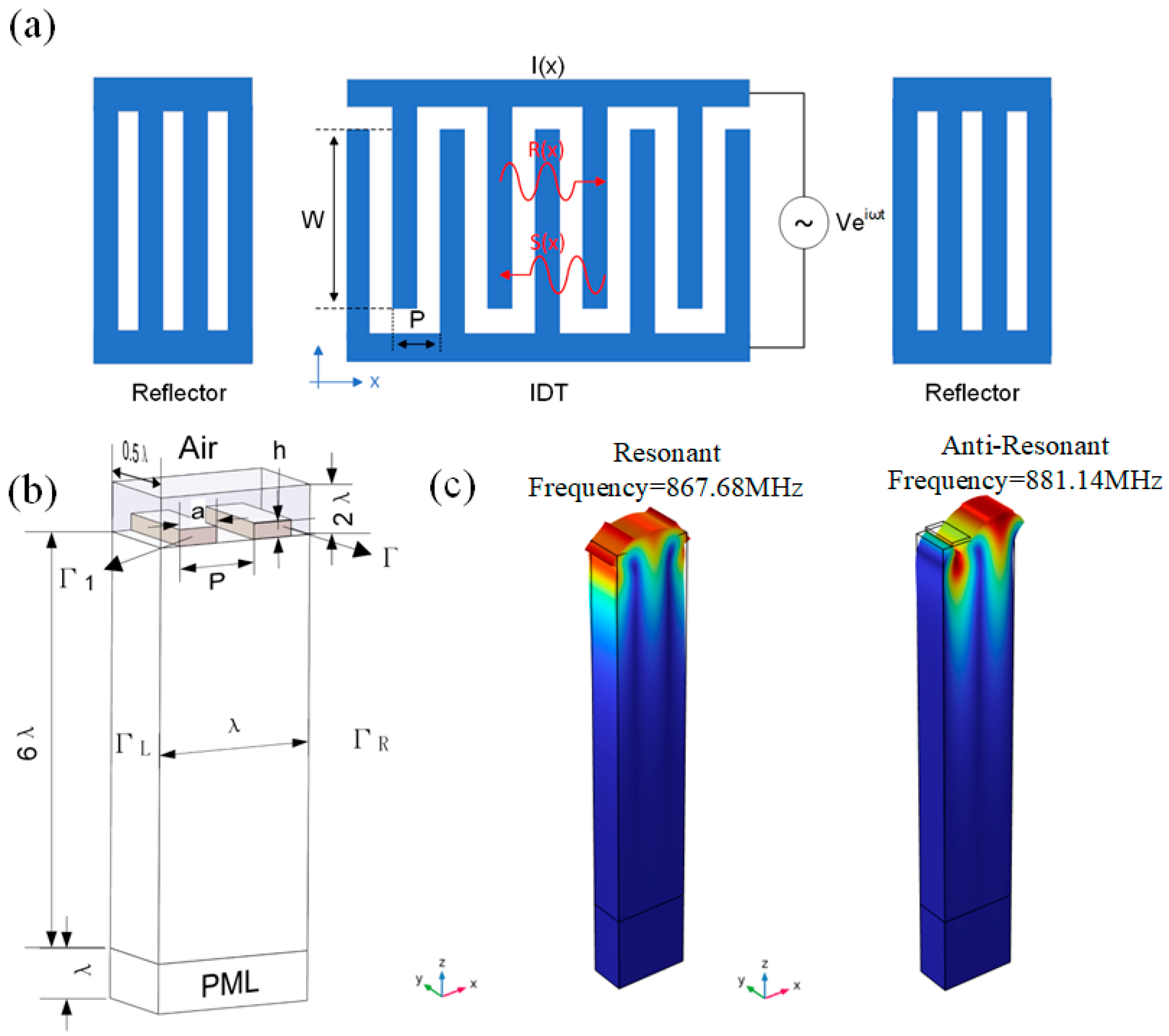
2. Rationally Theoretical Design of SAW Devices
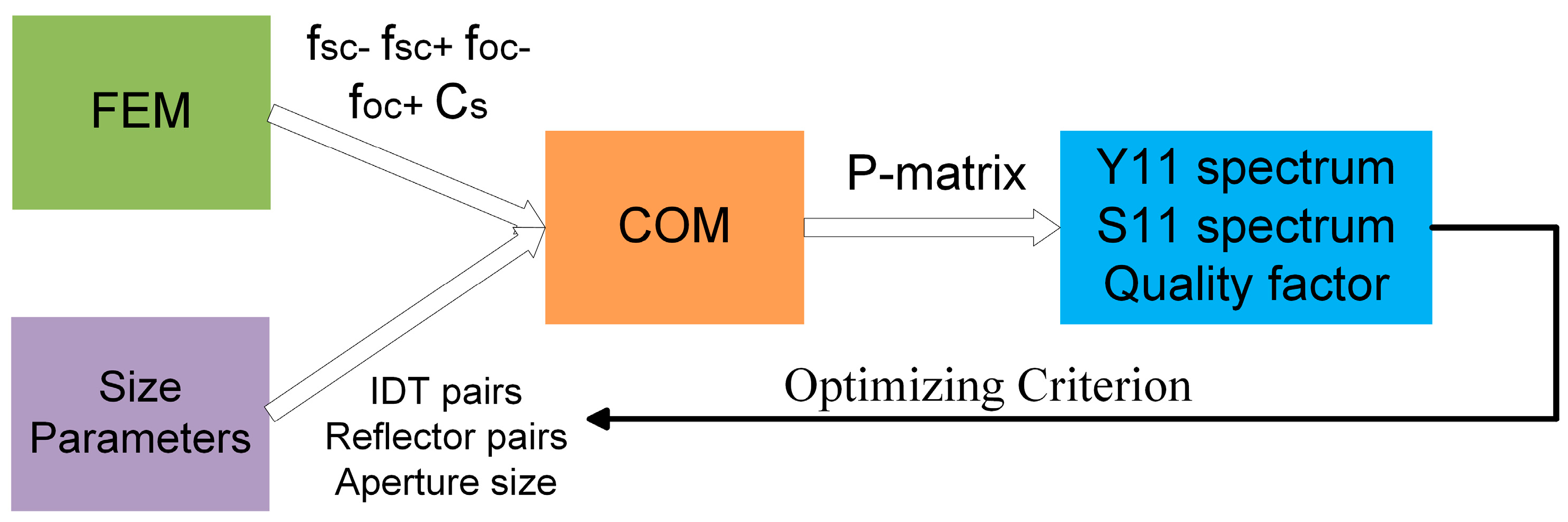
2.1. Design Process
2.2. COM Parameters Extraction Using FEM
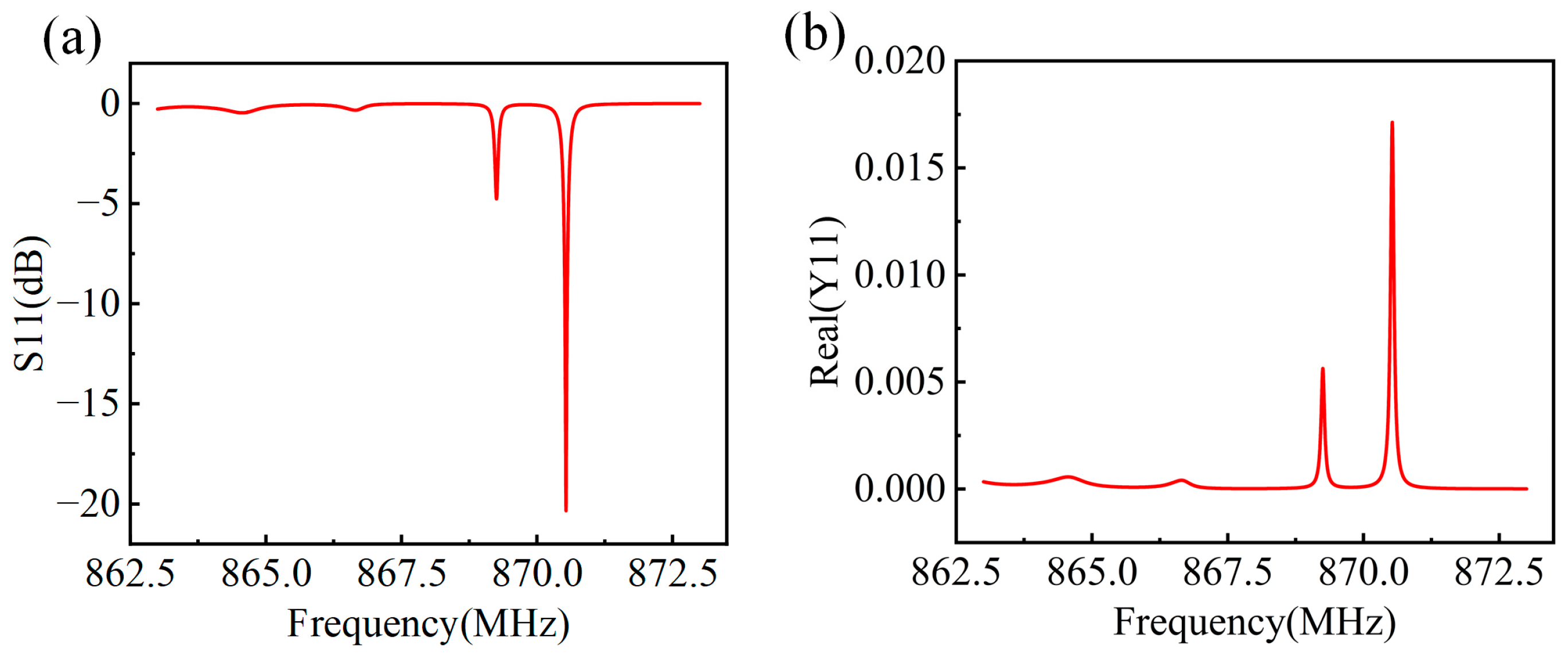
2.3. SAW Device Performance Calculation Using COM Model
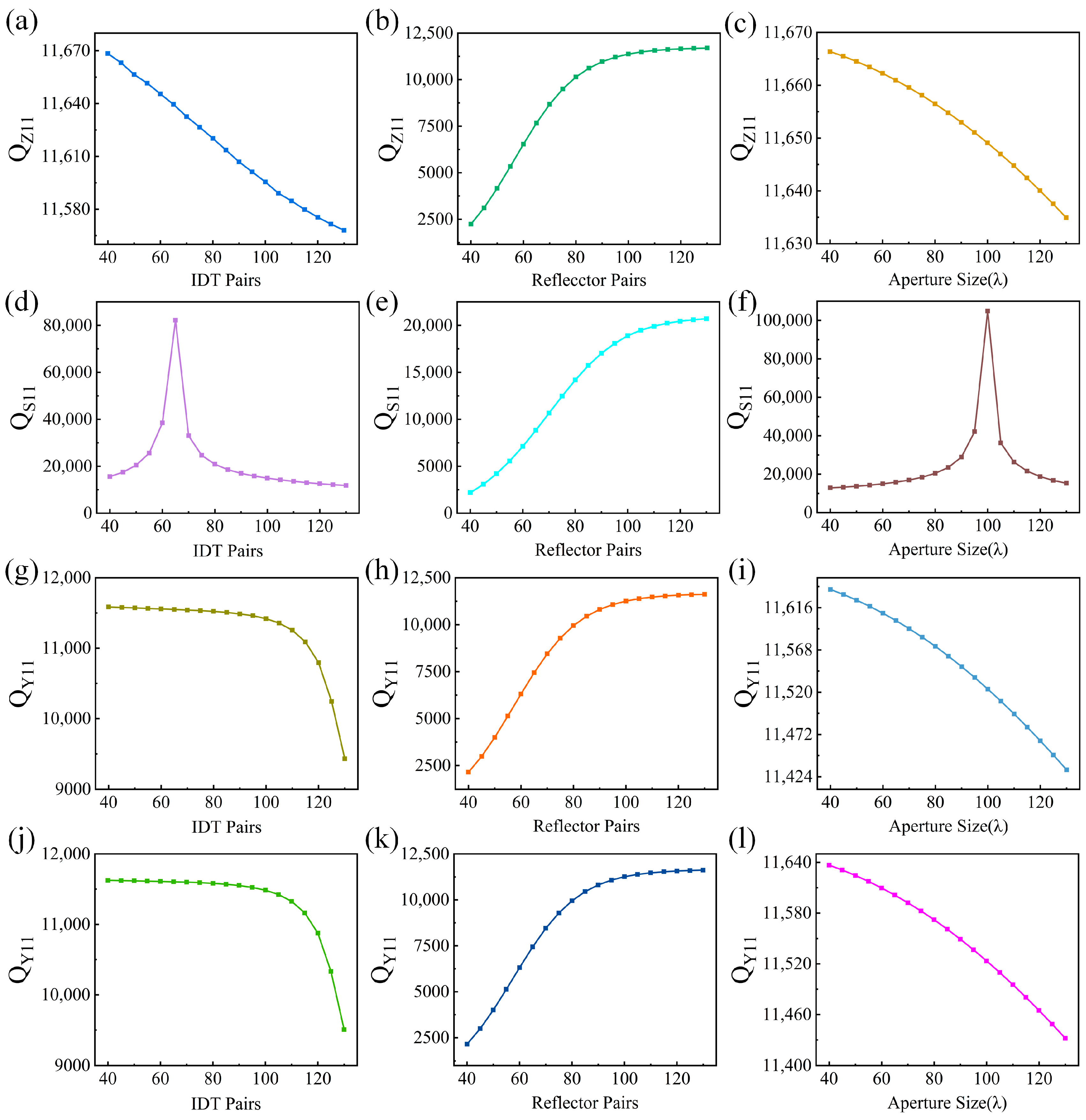
2.4. Optimization of IDT and Reflector
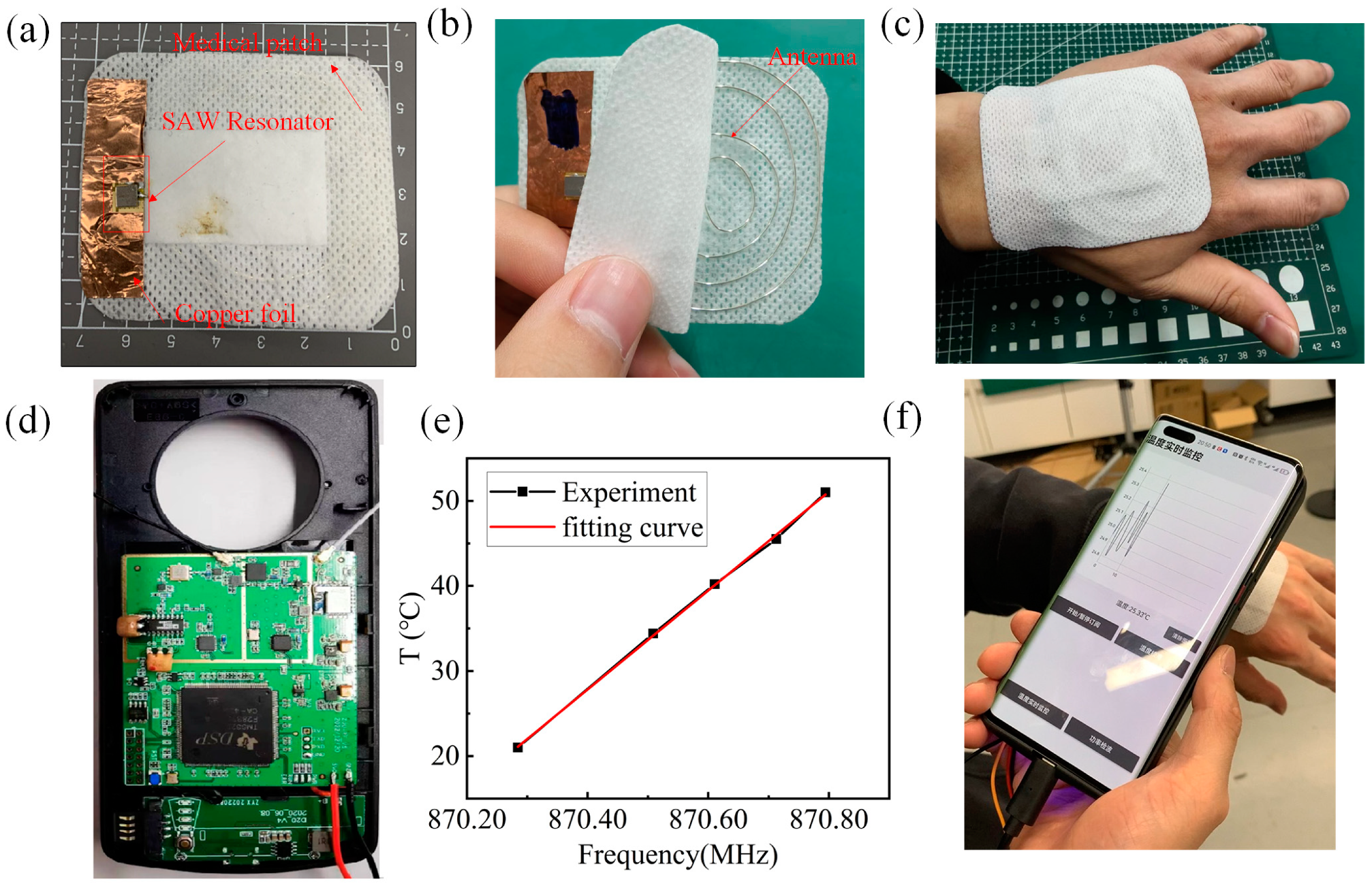
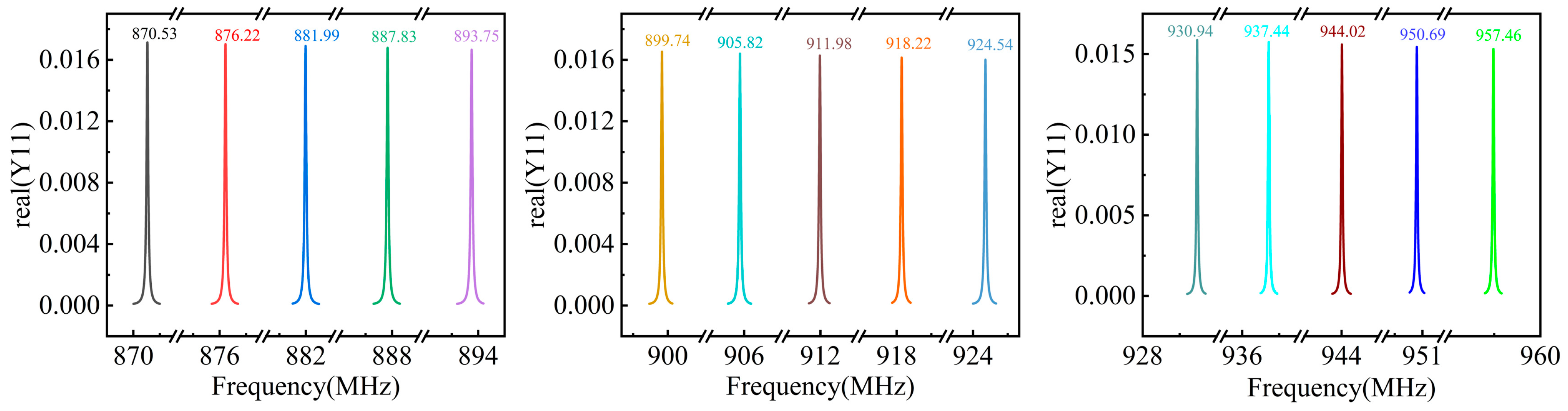
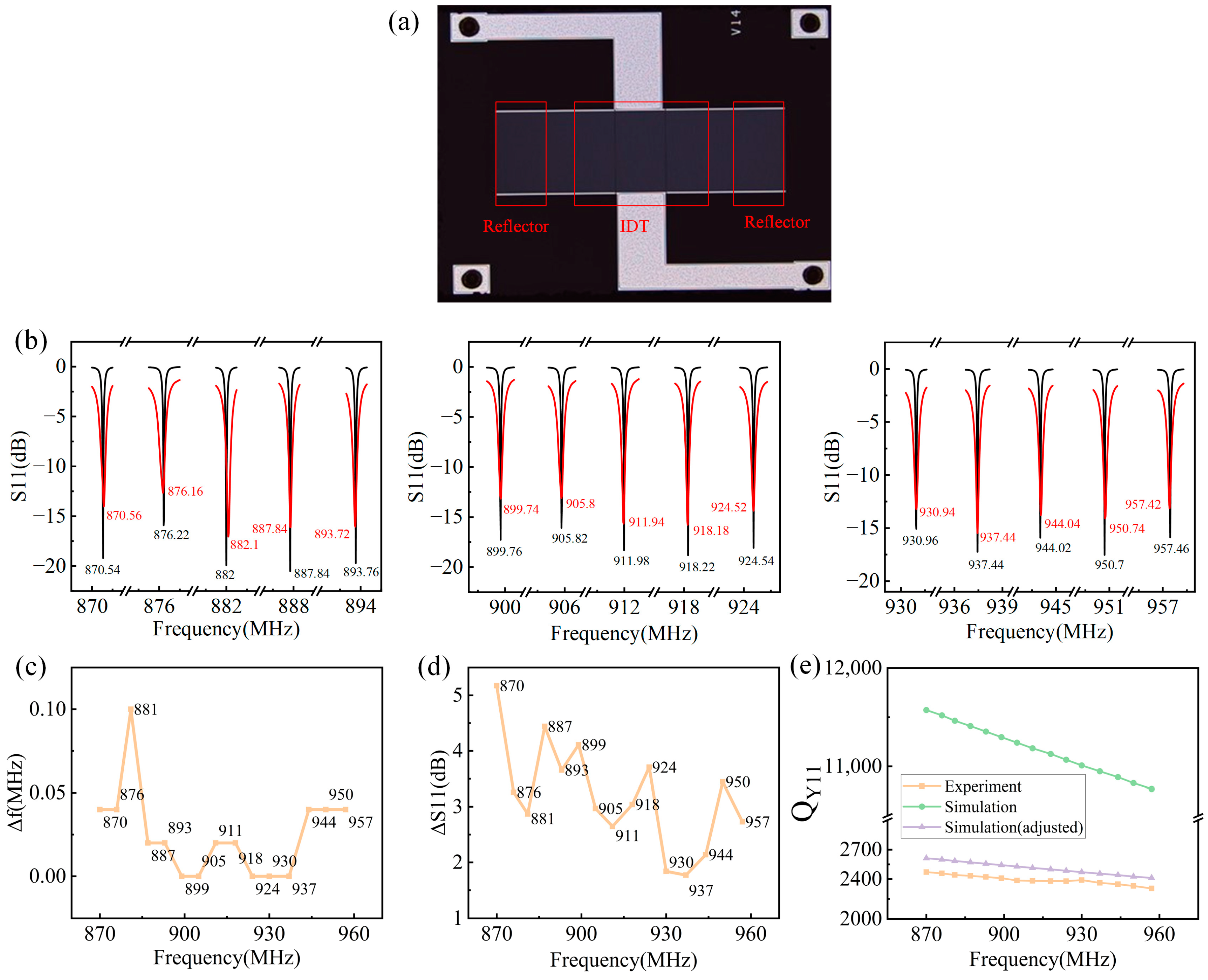
3. Comparison of Experimental and Simulated Results
4. Demonstration of Wearable Body Temperature Monitoring
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, C.; Song, Y.; Han, M.; Zhang, H. Portable and Wearable Self-Powered Systems Based on Emerging Energy Harvesting Technology. Microsyst. Nanoeng. 2021, 7, 25. [Google Scholar] [CrossRef] [PubMed]
- An, B.W.; Shin, J.H.; Kim, S.-Y.; Kim, J.; Ji, S.; Park, J.; Lee, Y.; Jang, J.; Park, Y.-G.; Cho, E.; et al. Smart Sensor Systems for Wearable Electronic Devices. Polymers 2017, 9, 303. [Google Scholar] [CrossRef]
- Stoppa, M.; Chiolerio, A. Wearable Electronics and Smart Textiles: A Critical Review. Sensors 2014, 14, 11957–11992. [Google Scholar] [CrossRef] [PubMed]
- Majumder, S.; Mondal, T.; Deen, M. Wearable Sensors for Remote Health Monitoring. Sensors 2017, 17, 130. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Pharr, M.; Salvatore, G.A. Lab-on-Skin: A Review of Flexible and Stretchable Electronics for Wearable Health Monitoring. ACS Nano 2017, 11, 9614–9635. [Google Scholar] [CrossRef] [PubMed]
- Andreu-Perez, J.; Leff, D.R.; Ip, H.M.D.; Yang, G.-Z. From Wearable Sensors to Smart Implants—Toward Pervasive and Personalized Healthcare. IEEE Trans. Biomed. Eng. 2015, 62, 2750–2762. [Google Scholar] [CrossRef] [PubMed]
- Formica, D.; Schena, E. Smart Sensors for Healthcare and Medical Applications. Sensors 2021, 21, 543. [Google Scholar] [CrossRef]
- Su, M.; Hua, J.; Sun, X.; Liu, Z.; Shi, Y.; Pan, L. Wireless Wearable Devices and Recent Applications in Health Monitoring and Clinical Diagnosis. Biomed. Mater. Devices 2023, 1–26. [Google Scholar] [CrossRef]
- Alam, M.S.; Kim, J.K.; Choi, J. Multifunctional Wearable System for Mapping Body Temperature and Analyzing Sweat. ACS Sens. 2023, 8, 1980–1988. [Google Scholar] [CrossRef]
- Yun, S.-O.; Lee, J.H.; Lee, J.; Kim, C.-Y. A Flexible Wireless Sensor Patch for Real-Time Monitoring of Heart Rate and Body Temperature. IEICE Trans. Inf. Syst. 2019, 102, 1115–1118. [Google Scholar] [CrossRef]
- Wang, L.-F.; Lu, J.-J.; Dong, L.; Huang, Q.-A. A Biocompatible and Biodegradable LC Temperature Sensor Based on Dual-Layer Inductors. IEEE Sens. J. 2024, 24, 3766–3773. [Google Scholar] [CrossRef]
- Varadharajan Idhaiam, K.S.; Caswell, J.A.; Pozo, P.D.; Sabolsky, K.; Sierros, K.A.; Reynolds, D.S.; Sabolsky, E.M. All-Ceramic Passive Wireless Temperature Sensor Realized by Tin-Doped Indium Oxide (ITO) Electrodes for Harsh Environment Applications. Sensors 2022, 22, 2165. [Google Scholar] [CrossRef] [PubMed]
- Bulst, W.-E.; Fischerauer, G.; Reindl, L. State of the Art in Wireless Sensing with Surface Acoustic Waves. IEEE Trans. Ind. Electron. 2001, 48, 265–271. [Google Scholar] [CrossRef]
- Aslam, M.Z.; Zhang, H.; Sreejith, V.S.; Naghdi, M.; Ju, S. Advances in the Surface Acoustic Wave Sensors for Industrial Applications: Potentials, Challenges, and Future Directions: A Review. Measurement 2023, 222, 113657. [Google Scholar] [CrossRef]
- Gao, X.; Cheng, L.; Xue, X.; Zhai, S.; Liang, Y.; Wang, W.; Liu, M.; Zhu, J.; Li, Z. Development of Wireless and Passive SAW Temperature Sensor with Very High Accuracy. Appl. Sci. 2021, 11, 7422. [Google Scholar] [CrossRef]
- Hashimoto, K. Coupling-of-Modes Theory. In Surface Acoustic Wave Devices in Telecommunications: Modelling and Simulation; Hashimoto, K., Ed.; Springer: Berlin/Heidelberg, Germany, 2000; pp. 191–235. ISBN 978-3-662-04223-6. [Google Scholar]
- Laude, V.; Reinhardt, A.; Ballandras, S.; Khelif, A. Fast FEM/BEM Computation of SAW Harmonic Admittance and Slowness Curves. In Proceedings of the IEEE Ultrasonics Symposium, Montreal, QC, Canada, 23–27 August 2004; Volume 1, pp. 445–448. [Google Scholar]
- Dufilie, P.; Ventura, P.; Hecht, F. COM Parameters for Thick Metal and Partially Buried Electrodes Extracted from a Mixed FEM/BEM Numerical Model. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 807–810. [Google Scholar]
- Solal, M.; Chen, L.; Gratier, J. Measurement and FEM/BEM Simulation of Transverse Effects in SAW Resonators in Lithium Tantalate. In Proceedings of the 2010 IEEE International Ultrasonics Symposium, San Diego, CA, USA, 11–14 October 2010; pp. 175–180. [Google Scholar]
- Wang, H.; Wang, W.; Wu, H.; Su, B.; Shui, Y. Precise Simulation of Surface Acoustic Wave Devices Using Frequency-Dependent Coupling-of-Modes Parameters. Sci. China Phys. Mech. Astron. 2013, 56, 1263–1268. [Google Scholar] [CrossRef]
- Xu, H.; Jin, H.; Dong, S.; Song, X.; Chen, J.; Xuan, W.; Huang, S.; Shi, L.; Luo, J. Mode Analysis of Pt/LGS Surface Acoustic Wave Devices. Sensors 2020, 20, 7111. [Google Scholar] [CrossRef] [PubMed]
- Pierce, J.R. Coupling of Modes of Propagation. J. Appl. Phys. 1954, 25, 179–183. [Google Scholar] [CrossRef]
- Cross, P.S.; Schmidt, R.V.; Haus, H.A. Acoustically Cascaded ASW Resonator-Filters. In Proceedings of the 1976 Ultrasonics Symposium, Annapolis, MD, USA, 29 September–1 October 1976; pp. 277–280. [Google Scholar]
- Suzuki, Y.; Shimizu, H.; Takeuchi, M.; Nakamura, K.; Yamada, A. Some Studies on SAW Resonators and Multiple-Mode Filters. In Proceedings of the 1976 Ultrasonics Symposium, Annapolis, MD, USA, 29 September–1 October 1976; pp. 297–302. [Google Scholar]
- Haus, H.A.; Wright, P.V. The Analysis of Grating Structures by Coupling-Of-Modes Theory. In Proceedings of the 1980 Ultrasonics Symposium, Boston, MA, USA, 5–7 November 1980; pp. 277–281. [Google Scholar]
- Chen, D.-P.; Haus, H.A. Analysis of Metal-Strip SAW Gratings and Transducers. IEEE Trans. Sonics Ultrason. 1985, 32, 395–408. [Google Scholar] [CrossRef]
- Abbott, B.P.; Hartmann, C.S.; Malocha, D.C. A Coupling-of-Modes Analysis of Chirped Transducers Containing Reflective Electrode Geometries. In Proceedings of the IEEE Ultrasonics Symposium, Montreal, QC, Canada, 3–6 October 1989; pp. 129–134. [Google Scholar]
- Wright, P.V. A New Generalized Modeling of SAW Transducers and Gratings. In Proceedings of the 43rd Annual Symposium on Frequency Control, Denver, CO, USA, 31 May–2 June 1989; pp. 596–605. [Google Scholar]
- Plessky, V.; Koskela, J. Coupling-of-modes Analysis of SAW Devices. Int. J. High Speed Electron. Syst. 2000, 10, 867–947. [Google Scholar] [CrossRef]
- Sun, X.; Ma, R.; Zhou, S.; Shao, X.; Cheng, J.; Lin, D.; Wang, W.; Liu, W. Fast, Accurate and Full Extraction of Coupling-of-Modes Parameters by Finite Element Method. Crystals 2022, 12, 706. [Google Scholar] [CrossRef]
- Hao, W.; Liu, J.; Liang, Y. Mass Sensitivity Optimization of a Surface Acoustic Wave Sensor Incorporating a Resonator Configuration. Sensors 2016, 16, 562. [Google Scholar] [CrossRef] [PubMed]
- Morgan, D. Surface Acoustic Wave Filters: With Applications to Electronic Communications and Signal Processing; Academic Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Wang, H.; Wang, W.; Su, B.; Wang, J.; Wu, H.; Shui, Y. A Novel Approach to Simulate Low-Loss Surface Acoustic Wave Devices Using Dispersive COM Parameters. In Proceedings of the 2012 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Shanghai, China, 23–25 November 2012; pp. 391–394. [Google Scholar]
- Manolatou, C.; Khan, M.J.; Fan, S.; Villeneuve, P.R.; Haus, H.A.; Joannopoulos, J.D. Coupling of Modes Analysis of Resonant Channel Add-Drop Filters. IEEE J. Quantum Electron. 1999, 35, 1322–1331. [Google Scholar] [CrossRef]
- Zhang, M.; Li, R.; Wu, Y.; Song, G. Thermoregulation of Human Hands in Cold Environments and Its Modeling Approach: A Comprehensive Review. Build. Environ. 2024, 248, 111093. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Y.; Deng, M.; Chen, J.; Duan, Y.; Zhang, J.; Mu, D.; Dong, S.; Luo, J.; Jin, H.; Kakio, S. Rational Design of a Surface Acoustic Wave Device for Wearable Body Temperature Monitoring. Micromachines 2024, 15, 555. https://doi.org/10.3390/mi15050555
Xie Y, Deng M, Chen J, Duan Y, Zhang J, Mu D, Dong S, Luo J, Jin H, Kakio S. Rational Design of a Surface Acoustic Wave Device for Wearable Body Temperature Monitoring. Micromachines. 2024; 15(5):555. https://doi.org/10.3390/mi15050555
Chicago/Turabian StyleXie, Yudi, Minglong Deng, Jinkai Chen, Yue Duan, Jikai Zhang, Danyu Mu, Shurong Dong, Jikui Luo, Hao Jin, and Shoji Kakio. 2024. "Rational Design of a Surface Acoustic Wave Device for Wearable Body Temperature Monitoring" Micromachines 15, no. 5: 555. https://doi.org/10.3390/mi15050555