1. Introduction
The most common principles for the measurement of small flows are based on the pressure drop generated by the flow through a constriction or the transport of heat by the flow [
1]. Unfortunately all these measurements are a function of the properties of the fluid. There are only a few principles which allow measuring the flow without any knowledge of the fluid. The mass flow can be measured by detecting the Coriolis force [
2,
3,
4] and the volume flow can be determined independent of the fluid by the displacement of a membrane [
5]. Unfortunately, flow measurement by the Coriolis force or membrane displacement needs a complicated sensor design.
At a first glance the measurement of the time of flight (TOF) between generating a heat pulse and the arrival of this pulse at a sensor wire downstream [
6,
7,
8] also appears to be independent of fluid properties. However, experiments showed that the measured time of flight was still a function of the fluid [
9,
10].
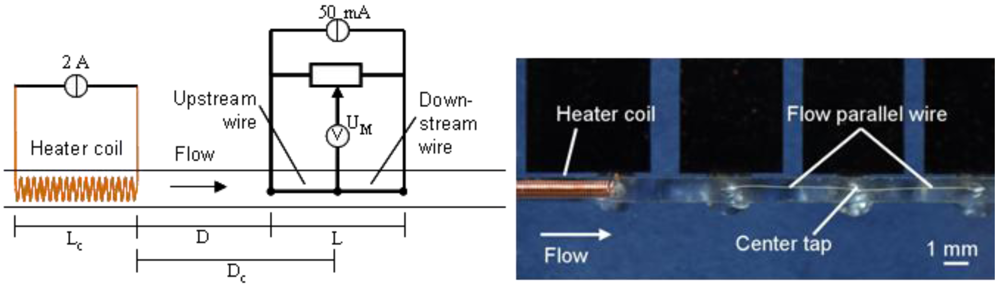
When the temperature sensor is a flow parallel wire (FPW) in the center of a channel, the measurement is only a weak function of fluid properties. The FPW is equipped with a center tap and the upstream and downstream parts of it are combined to a half bridge as shown in
Figure 1. It turned out that the maximum of the bridge output is a function of flow and only weakly affected by fluid properties.
Figure 1.
Time of flight sensor employing a sensor wire parallel to the channel shown as a schematic drawing (left) and a photo (right).
Figure 1.
Time of flight sensor employing a sensor wire parallel to the channel shown as a schematic drawing (left) and a photo (right).
2. Fabrication and Operation
A flow channel with a cross-section of 1 mm × 1 mm was milled into PC (polycarbonate) plates, 3 mm in thickness. Holes were drilled into the bottom of the channels and copper wires were glued into these holes as bushings. Other holes at the ends of the channels served as fluid inlet and outlet. An 8 mm long copper coil with wire and coil diameters of 100 µm and 800 µm, respectively, served as the heater. This heater coil was soldered between two bushings. The temperature sensor was made of a gold wire, 17.5 µm in thickness, which was soldered to corresponding bushings. The channel was closed by gluing a PMMA (polymethylmethacrylate) lid on top.
The heater coil was driven by approximately 200 ms long current pulses of 2 A. The flow was generated by a syringe pump. The length L of the FPW and its distance D from the heater coil were 10 mm and 2 mm, respectively.
Figure 2.
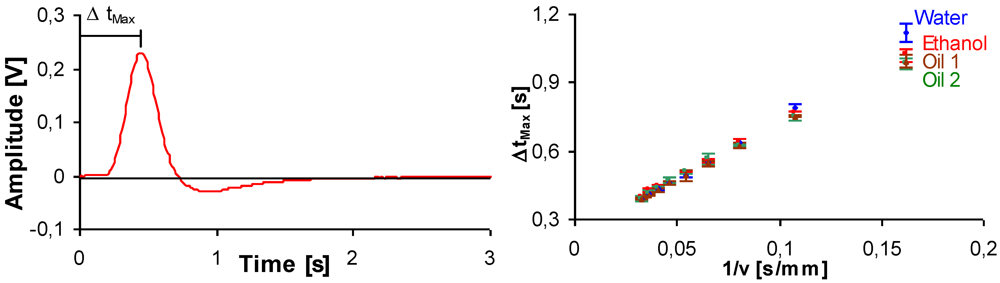
Signal from the bridge shown on the left of
Figure 1 (
left) and time of flight ∆t
Max for different fluids as a function of the inverse of the mean flow velocity (
right).
Figure 2.
Signal from the bridge shown on the left of
Figure 1 (
left) and time of flight ∆t
Max for different fluids as a function of the inverse of the mean flow velocity (
right).
The output signal U
M of the bridge shown in
Figure 1 is displayed in
Figure 2. When the heat pulse arrives at the upstream part of the FPW, the bridge output increases until the temperature rise of the downstream part is faster than the temperature increase of the upstream one. The bridge output can also become negative when the downstream part of the wire gets hotter than the upstream one. The time between the start of the heater pulse and maximum ∆t
Max of the bridge output were recorded.
3. Experimental Section and Discussion
On the right of
Figure 2 the measured times ∆t
Max of four liquids are shown as a function of the inverse of the mean flow velocity. The slope of the characteristic curve of water is 5.6 mm while the one of oil 1 is 4.7 mm,
i.e., the measured times of water and oil 1 deviate at low flow velocities by up to 12.5% while for velocities above 10 mm/s there are nearly no deviations. Properties of the four liquids employed for the experiments are shown in
Table 1.
Table 1.
Properties of the liquids employed for the measurements.
Table 1.
Properties of the liquids employed for the measurements.
| Properties | Measured Fluids |
|---|
| Water | Ethanol | Oil 1 | Oil 2 |
|---|
| Density ρ [kg/m3] | 998 | 790 | 809 | 857 |
| Viscosity η [mPa s] | 1.0 | 1.2 | 3.25 | 49.3 |
| Heat conductivity λ [W/(m∙K)] | 0.60 | 0.165 | 0.15 | 0.15 |
| Heat capacity c [kJ/(kg K)] | 4.2 | 2.4 | 1.7 | 1.7 |
Although the properties of the liquids differ significantly, their characteristic curves nearly coincide. On the other hand, measurements with sensor wires perpendicular to the flow channel show deviations of the times ∆t
Max of such liquids which are as large as 15–30% [
9]. A possible explanation of this observation is that due to different heat conductivity and heat capacity the temperature profile in the flow may be different even if the flow profile should be the same. A sensing wire arranged perpendicular to the channel detects the mean temperature along a line perpendicular to the flow while the FPW measures the temperature change along a single stream line.
3.1. Shifted Wire Position
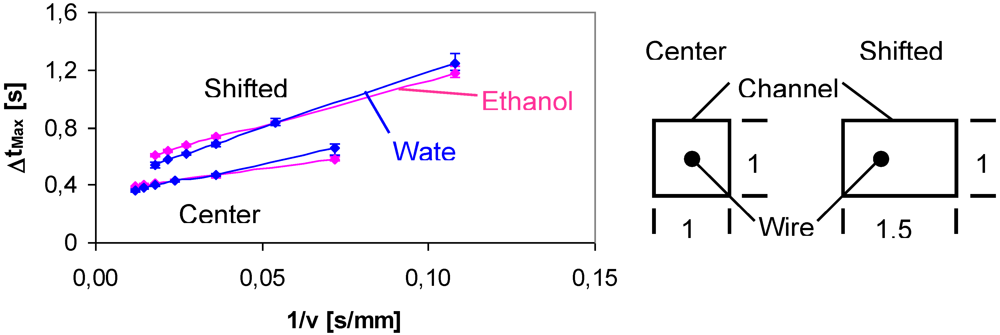
This was investigated further by shifting the position of the FPW from the center of the channel nearer to its wall. The results for the Δt
Max of water and ethanol are shown in
Figure 3. The shifted FPW leads to higher flow times for both liquids; for both wire positions water has a larger Δt
Max at smaller velocities. However, for larger velocities ethanol shows longer times Δt
Max. Up to now there is no explanation why this systematic trend appears in the data. The slopes of the curves in
Figure 3 are approximately 7 mm corresponding to the distance between the end of the heater and the center tap. However, it is not understood why water and ethanol result in different slopes.
Figure 3.
Time of flight ∆tMax for water and ethanol as a function of the inverse of the mean flow velocity for a center and a shifted position of the flow parallel wire (FPW).
Figure 3.
Time of flight ∆tMax for water and ethanol as a function of the inverse of the mean flow velocity for a center and a shifted position of the flow parallel wire (FPW).
3.2. Combination with a Quick Sensor
The response time of every time of flight measurement is low because it is necessary to wait for the arrival of the heat pulse at the sensing wire. Therefore, the FPW will be too slow for several applications. On the other hand, a combination of the slow but fluid independent FPW with a fast but cross sensitive flow sensor allows to take benefit of the advantages of both and to avoid their disadvantages.
If the flow is measured by the pressure drop over a constriction in a channel, the response time is very small but the sensor is affected very much by clogging or a change of the viscosity of the fluid which could occur when temperature or fluid composition are changing. The measurement of the pressure difference over a capillary has been combined with a FPW by calibrating the pressure sensor every 5 s with the measurement from the FPW [
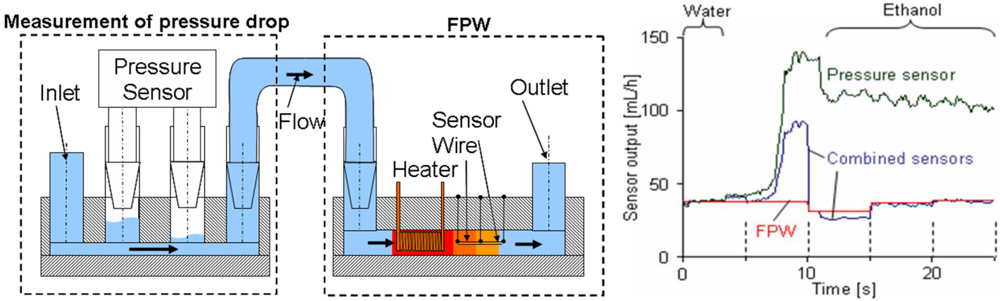
11]. Thus a change in temperature or the composition of the fluid results in a recalibration of the pressure sensor after not more than 5 s. In
Figure 4 there are shown the sensor outputs of the pressure sensor calibrated for water, the FPW, and the pressure sensor is recalibrated by the FPW. A dashed line indicates when the pressure sensor was recalibrated. To the inlet of the combined sensors there was connected a 20 cm long hose filled with water. To the other end of the hose there was connected a syringe filled with ethanol. A syringe pump delivered an average flow of 40 mL/h. Thereby, first water and then ethanol was driven through the sensors.
Figure 4.
(a) Design of the combination of a sensor for the pressure drop over a micro channel and a FPW; (b) Calibrated and not calibrated output of the pressure sensor when the fluid is changed from water to ethanol.
Figure 4.
(a) Design of the combination of a sensor for the pressure drop over a micro channel and a FPW; (b) Calibrated and not calibrated output of the pressure sensor when the fluid is changed from water to ethanol.
The interface between the two liquids appears at the pressure sensor at 4 s, as shown in
Figure 4. The larger viscosity of ethanol results in a rising signal of the pressure sensor. At 5 s the small rise of the signal of the combined sensors was taken down to 40 mL/h again. The same happens at 10 s, and after 15 s the combined sensors show the correct flow although the pressure sensor alone has a much larger output. On the other hand, the quick changes generated by the not steady flow of the syringe pump are shown by the combined sensors and not by the FPW with its long response time. Therefore, the signal of the pressure sensor recalibrated with the time of flight measurement from the FPW shows some deviation for 15 s when the fluid is changing or the flow resistance of the capillary is changing, but afterwards the correct flow is detected again.
4. Conclusions
When the flow is determined from the time of flight of a heat pulse between a heater and a sensor wire parallel to the flow channel, the result is only a very weak function of fluid properties. Therefore, the fluid composition does not need to be known for flow measurements.
The response time of all time of flight sensors is long, but this drawback can be compensated if such a sensor is employed to calibrate another flow sensor with a short response time. The calibration with an FPW can also compensate the drawbacks of other flow sensors which are cross-sensitive to temperature changes, partial clogging, or other parameters.
It is not yet understood why the FPW is less sensitive to fluid properties. It would be interesting to perform further experiments and theoretical investigations to find out what the reason is for the remarkable properties of this sensor. A theoretical explanation of the sensor could also pave the way to reduce the still observed effect of the fluid.




{kind=link}
{kind=link}
{kind=link}
{kind=link}

