1. Introduction
Micro electromechanical system (MEMS) gyroscope has the advantages of small size, light weight, and low cost [
1,
2,
3,
4], which is widely used in various fields of modern navigation. However, the accuracy of MEMS gyroscopes is low. So it is important to compensate the errors of MEMS gyroscopes.
MEMS gyroscope error can be divided into deterministic error and random error [
5]. Deterministic error can be eliminated by calibrating the MEMS gyroscope [
6]. The random error has a strong randomness, so the random error becomes one of the main factors that limit the accuracy of the MEMS gyroscope. At present, the modeling methods of random error about MEMS gyroscopes mainly include autocorrelation analysis, power spectral density method and Allan variance analysis method. Allan variance analysis can characterize and identify various random error sources of MEMS gyroscopes. It is convenient to establish accurate random error model and improve navigation precision. Many scholars such as Gao et al., Chen et al. and Li et al. have made Allan variance, overlapped Allan variance identification for random errors of MEMS gyroscopes and achieved good results [
7,
8,
9]. However, MEMS gyroscope signals are non-stationary, so the Allan variance is difficult to track the dynamic changes of the signal. Wang et al. use a rectangular window to intercept the original signal and analyze the Allan variance for intercepted signal. So the time-varying characteristics of various random errors can be effectively tracked [
10]. However, the DAVAR method intercepts the original signal using a fixed length rectangular window which has a defect of power leakage and low confidence in identifying noise. In Zhang et al. paper [
11], the original signal is separated according to the high and low frequency by using the wavelet decomposition method. And next, the signals with different frequencies were used different window functions to intercept the original signal, which reduce the power loss of DAVAR method [
11]. Zhu et al. adjust the length of the rectangular window according to the original signal kurtosis and the changes of variance to improve the confidence level of the variance estimation effectively [
12,
13]. But the kurtosis and variance reflect the stability of the rectangular window interception signal, so when the length of the window is changed according to the variance and kurtosis, there are defects in the lag of window length regulation. In Gu et al. paper [
14], the choice of the window length is based on a fuzzy control method, which improves the dynamic tracking ability of DAVAR. In Zhu et al. paper [
15], the effective length of the analysis data is increased with inverted mirror extension method, however, all signals are extended and analyzed, which is difficult to ensure that the analysis results reflect the true characteristics of the original signal.
Because the dynamic Allan variance analysis which use the rectangular window with a fixed window length to intercept the original signal has the disadvantage of power leakage and insensitive tracking of the impact components in the signal, so the paper proposes a method which uses sliding kurtosis contribution coefficient to sense the impact component at the end of the intercepted signal, and use the sliding kurtosis contribution coefficient and kurtosis together to control the rectangular window length. And the extension enhances the beginning and ending signal utilization with mirror inverted. Through the simulation, it is found that the sliding kurtosis contribution coefficient can sense the content of the impact component at the end of the intercepted signal so that the window length of the rectangular window can be adjusted in time, which enhances the sensitivity of the dynamic Allan variance analysis to the impact signal. Finally, the feasibility of the proposed method is verified through the actual measurement and the analysis of MEMS gyroscope signals.
3. Kurtosis and Sliding Kurtosis Contribution Coefficient
The kurtosis is a normalized fourth-order central moment, dimensionless and can reflect the distribution of the signal. For a signal of length
n, the kurtosis coefficient is as in Equation (14).
In Equation (14),
μ is the mean value of signal
, and
is the standard deviation of signal
.
K = 3 (The signal distribution curve has a normal kurtosis);
K > 3 (The peak value of the impact component in the signal is above the normal distribution curve);
K < 3 (The impact component amplitude is less than the normal distribution). Wang et al. use rectangular windows to intercept the original signal and then the kurtosis value is calculated to adjust the window length [
10,
11]. However, the kurtosis of the intercepted signal has the characteristics of a rectangular window intercepting signal, which leads to the shortcomings of early sensitivity to the beginning and sensitive delay to the end of dynamic signal. When using a rectangular window with a window length of 201 and 601, the original signal is intercepted and its kurtosis value is calculated. The kurtosis and the comparison between original signal and the intercepted signal are shown in
Figure 6.
Through the above analysis, it is difficult to track the signal fluctuations by using the window function intercepting the signal and then calculating the interception signal kurtosis value. The kurtosis value is more stable with the longer window length, but the worse the tracking results are. In order to accurately track the dynamic characteristics of the signal, the shorter window length of the rectangular window will be selected. When the window length is very short, the kurtosis value is volatile, and it is difficult to track fluctuations of signal. As shown in
Figure 6, the kurtosis of window length 11 changes dramatically which make the kurtosis difficult track the dynamic response of the signal. Therefore, this paper proposes the sliding kurtosis contribution coefficient based on the idea of kurtosis contribution coefficient [
21]. The principle of sliding kurtosis contribution coefficient is as follows.
K is kurtosis of the sampling sequence
(
).
xωp is obtained by intercepting the original signal with a
L length rectangular window at the
p data point in time
tp.
In the equation above, xmp is defined as the sequence in the original signal sequence excluding the xωp sequence. Though calculation, the kurtosis of the xmp sequence is as follows.
In the equation above, μmp is the mean value of xmp and σmp is the standard deviation of xmp. The sliding kurtosis contribution coefficient of sequence xωp is as follows.
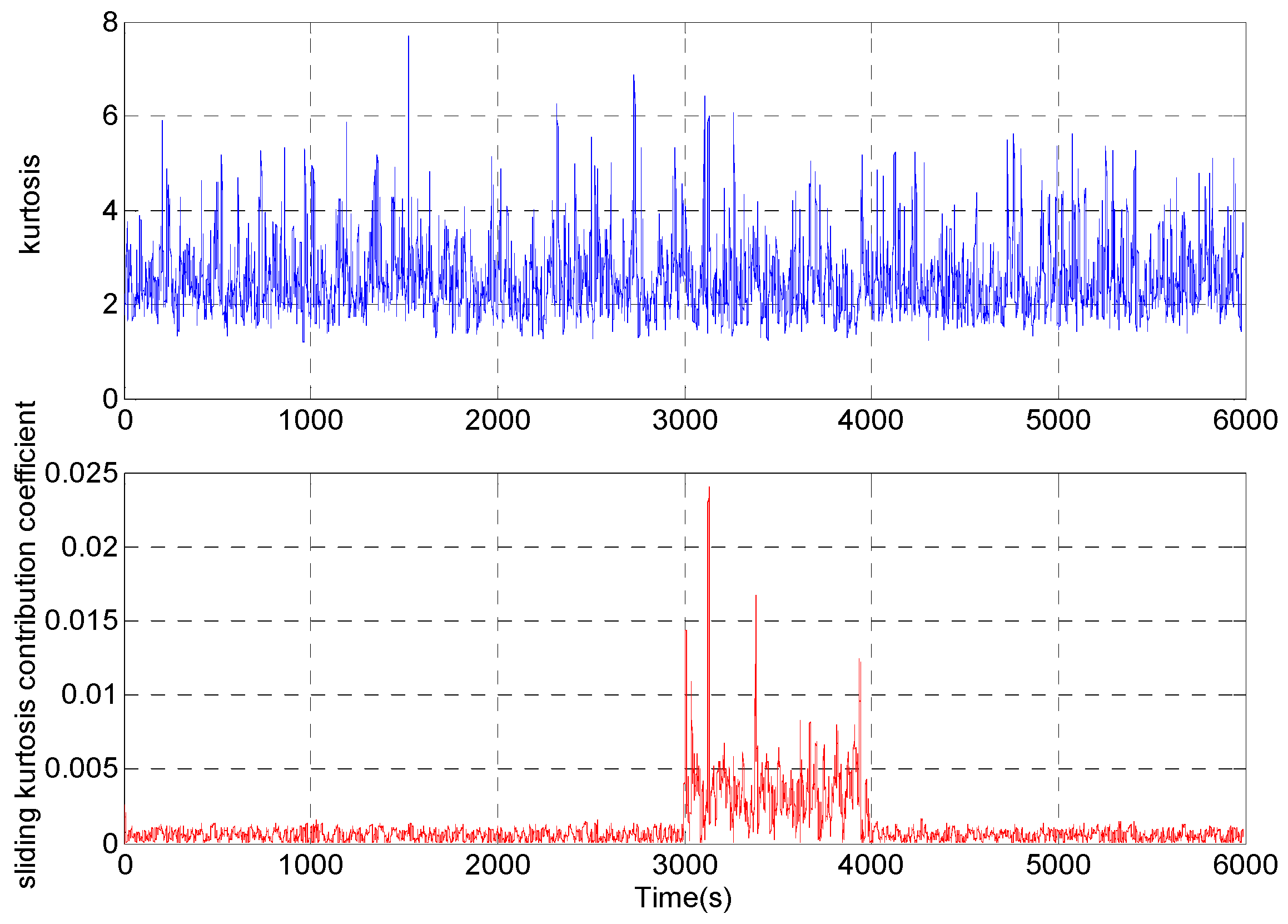
Sliding kurtosis contribution coefficient of different sequences in different analysis points is calculated, which can accurately estimate the abrupt time of the signal. For the above analog gyro signal, when the length of the rectangular window is
T = 11, the sliding kurtosis contribution coefficient is shown in
Figure 7.
It can be seen from
Figure 7 that the sliding kurtosis contribution coefficient which can be applied to the rectangular window with a short length can accurately reflect the dynamic change of the signal.
4. Improved DAVAR Algorithm
4.1. Extension
When the performance of signal is analyzed with a rectangular window, the problem of low utilization of the data in the beginning and end of the signal is inevitable. In summary, the beginning and end of the signal data is extended with inverted mirror method of extension, which can enhance the utilization of signal interval data.
When the center of the rectangular window is at , the standard deviation of the intercepted sequence is calculated as follows.
In the equation above, L is the window length of the rectangular window, m generally take 1/3 the length of the data column, is the sampling time.
4.2. Improved Window Length Adjusting Adaptively Algorithm
The traditional DAVAR algorithm intercept the original signal using a fixed window length rectangular window and analyze the dynamic Allan variance of the intercepted data, which has disadvantages of early sensitivity to the beginning and sensitive delay to the end of dynamic signal. A rectangular window function is designed by combining slipping kurtosis contribution coefficient and kurtosis. The rectangular windows with longer window lengths are used in the smoothing interval of the signal, which can enhance the confidence and stability of the analysis results. If the signal in the strong changes interval, the signal is dealt with short-window length rectangular window, which can accurately track the dynamic changes of signals and improve the tracking ability of dynamic Allan variance. So the improved window length adjusting adaptively algorithm is as follows.
(1) The L window is defined as a rectangular window with a suitable window length of L. Using the L window to intercept the original signal and analyze the kurtosis of the intercepted signal. The kurtosis threshold for stable signal is [K1,K2], such that at the analysis moment tp, the kurtosis value of this sequence Kp is calculated and the following relation is obtained.
(2) The l window is defined as a rectangular window with a suitable window length of l (l < L). The slipping kurtosis contribution coefficient of the signal sequence that is obtained by intercepting the signal from the end of a sequence cut from L window with l window is calculated. Through calculating the kurtosis value Kmp of the front L − l length signal in the L window intercepting signal, the sliding kurtosis contribution coefficient of the l window is calculated. S reflects the stability of the signal at the end of the L window and achieves an accurate sensitivity to the end of the intercepted signal sequence. The sliding kurtosis contribution coefficient in [S1,S2] is designed to represent the stable signal, which leads to the existence of Equation (17) on the tp moment.
The function f2 reflects whether there is an impact component at the moment. Where is the sampling interval.
(3) The above two output function values are combined and then get the following relationship.
When f(tp) is 0, the characterization of the signal is stationary, and the end of the intercept signal contains no impact components. When f(tp) is 1, the signal is unstable, and the rising edge of f(tp) is collected, which is known as the impact component, exists at time .
(4) When the dynamic Allan analysis of variance is analyzed, the maximum window length Lmax for a steady signal and the minimum window length Lmin for an unstable signal are usually designed. When f(tp) is 1, the signal contains the impact component at the moment, and the L window starts to capture the signal at time with the minimum window length Lmin. Assuming that the initial window length of the L window is , the maximum distance of the center about the L window moving distance is , and the design of the window length variation factor ∆L1 is as follows.
When
f(
tp) = 1, and at the next point
tp+1, the
L window’s window length
L(
tp+1) is as follows:
When , the intercepted signal is stable and the starting point of the intercepted sequence contains no impact component. In this case, it is required that window after increasing the window length can not acquire the signal before the time again. At this time, the window length of the L window is increased until it reaches Lmax. The maximum distance of L window center point moving is , then the window length variation factor ∆L0 is designed at this time.
And at the next point tp+1, the L window’s window length L(tp+1) is as follows.
5. Simulation and Test
Taking the rectangular window with a window length of 600 as an example, the adaptive change of window length based on kurtosis is analyzed as follows. The analysis results are as in
Figure 8. If the stability threshold of kurtosis is 4, and the sensitive nodes of dynamic signals are 2700 s, 3115 s, 3963 s, and 4300 s. When kurtosis is used to control the change of window length, reduce the length of the window at 2700 s, and the beginning of the rectangle window just collects the 3000 s data; increase the length of window at 3115 s, the end of the rectangular window collects the 2815 s data (3000 s data should be collected), and the signal is in a stable range, so the adjustment of window length is obviously too advanced. When the rectangle window is at 3963 s, the window length begins to decrease to sense the dynamic change of 4000 s data. But the 4263 s data is collected at the beginning of the rectangular window, and the signal is already in a stable state at this time, so there is a serious lag phenomenon in adaptive adjustment of window length.
If the stability threshold of kurtosis is 3.45, the sensitive nodes of dynamic signals are 2700 s, 3201 s, 3868 s, 4300 s. When kurtosis is used to control the change of window length, reduce the length of the window at 2700 s, and the beginning of the rectangle window just collects the 3000 s data; increase the length of window at 3201 s, the end of the rectangular window collects the 2901 s data (3000 s data should be collected), and there is still an adjustment ahead of time. When the rectangle window is at 3868 s, the window length begins to decrease to sense the dynamic change of 4000 s data. But the 4168 s data is collected at the beginning of the rectangular window, and there is also a lagging control.
If the stability threshold of kurtosis is 3.3, the rectangle window begins to increase the length of the window at 3228 s, and the end of the rectangular window collects the 2928 s data (3000 s data should be collected); the rectangle window begins to reduce the length of the window at 3840 s, and the 4140 s data is collected at the beginning of the rectangular window.
So the dynamic tracking effect is best when the stability threshold of kurtosis is 3.3. But at this time, the kurtosis value of the stationary interval has exceeded the kurtosis stability threshold, that is, the threshold value of the kurtosis is relatively small. From
Figure 8, we can see that the closer the kurtosis threshold is to 3, the more sensitive the adjustment of the rectangular window is, and the better the dynamic tracking effect is. Because in 3000~4000 s, the variance of the noise is increased to 3, that is, there is a sudden increase in the amplitude of noise at 3000 s. According to Equation (14), we know that the kurtosis value at 3000 s (the center of the rectangular window is in 2700 s) is positively correlated with the difference of noise variance before and after mutation. When the rectangular window intercepts the abrupt signal, the kurtosis will decrease gradually, no matter how large the variance of the mutation signal is. So the kurtosis value changes slowly between 3000~4000 s. The slow change leads that the adjustment of rectangular windows based on kurtosis is insensitive in this area. The sliding kurtosis contribution coefficient is used to characterize the signal in the kurtosis slowly changing region. So the stability threshold of kurtosis can be achieved closer to 3, and the better the dynamic tracking ability of improved DAVAR will be.
According to the analog MEMS gyroscope designed in
Section 2.2, the random error of signal is analyzed by the improved dynamic Allan variance method. Setting parameters:
Lmax = 600,
Lmin = 400;
K1 = 2.5,
K2 = 3.3;
S1 = 0,
S2 = 0.07;
l = 100;
∆L0 =
∆L1 = 2. The
l window’s window length and above parameters can be adjusted according to the sensitivity of the impact components in signal. The kurtosis value of the captured signal which is obtained by capturing original signal with rectangular windows with window length of 600, 400, or adaptive window length are obtained, respectively, as shown in
Figure 9. It can be found that before the impact signal is intercepted, the kurtosis value of the adaptive window length rectangular window intercepting signal coincides with the kurtosis value of the 600 window length rectangular window intercepting signal. And after the impact signal, the kurtosis value of the adaptive window length rectangular window intercepting signal coincides with the kurtosis value of the 400 window length rectangular window intercepting signal.
The simulation test is carried out according to the above parameters. And the signal kurtosis,
f1, sliding kurtosis contribution coefficient,
f2,
f and adaptive window length is shown in
Figure 10. It can be seen from
Figure 10 that the adaptive window length becomes the minimum window length at the 2803 s, and the data of the 3003 s is intercepted which is at the end of the intercepted signal and which is the starting point of the shock signal. Compared with the sliding kurtosis contribution coefficient, kurtosis can characterize the signal stability better, but it is insensitive to the end position of the impact component in the signal. As shown in
Figure 10, the interval [
K1,
K2] is relatively small (Some slightly fluctuating signals are shown unstable and
f1 jumps to 1). In this case, the shock signal is only perceived when the
L window reaches 3840 s. And at this time, the end of the
L window intercepting signal is the data at 4140 s. So the design of adaptive window length simply according to kurtosis is difficult to meet the requirements. Compared to the sensitivity of the sliding kurtosis contribution coefficient, the
L window is already sensitive to the end of the shock signal when it reaches 3743 s. And at this time, the end of the
L window intercepting signal is the data at 4043 s. Therefore, the reduction of window length at this time can improve the sensitivity of the impact component.
According to the improved DAVAR method, the dynamic Allan variance of the analog signal is shown in
Figure 11.
Figure 12 shows the random walk analysis results of the signal sequences which are obtained through intercepting the original signal by using the rectangular windows with different window lengths. It can be seen that the rectangular window with the window length of 600 is sensitive to the impact signal very early, and the recovery is later. The rectangular window with the window length of 400 is more sensitive to the impact signal, but the analysis result fluctuates obviously. The rectangular window with adaptive window length can accurately detect the impact component in the signal, and it ensures the stability of the analysis results.
The angle random walk of gyro is identified by improved DAVAR method. The comparison of confidence level and dynamic tracking ability of the analysis results between improved DAVAR (Adaptive window length DAVAR, A-DAVAR), DAVAR-400 (window length is 400) and DAVAR-600 (window length is 600) is shown in
Table 1.
In
Table 1, the beginning (3000 s) means that the window first senses the 3000 s data, and the window length should decrease at this time. The beginning (3000 s) should be close to DAVAR-600’s beginning (3000 s). The end (3000 s) means that the window lost senses the 3000 s data, and the window length should increase at this time. The end (3000 s) should be close to DAVAR-400’s end (3000 s). The ARW (0~2000 s) means the mean value from 0 s to 2000 s and the region is in stationary interval, so the ARW (0~2000 s) should be close to the refer value in
Section 2.2.
From
Table 1, we can see that the improved dynamic Allan variance solves the problem of both confidence and dynamic tracking ability.
The MEMS gyro is sensitive to temperature, so the MEMS gyro is fixed to the stationary preheating 1 h on the turntable to make the temperature reach steady state. The accurate angular velocity can be input to the MEMS gyro using the turntable. But the input angular velocity of the turntable is 0 in the experiment. Since the gyroscope bandwidth is 40 Hz, the sampling frequency is 100 Hz according to sampling theorem.
The gyro data collected for the 600 s is shown in
Figure 13. When the turntable input angle speed is 0, the output signal of MEMS gyroscope contains trend and random drift. Usually the mean value method and polynomial fitting method are used to remove the trend terms. So the random drift of MEMS gyro is obtained by removing trend items from data collection with 3-order polynomial fitting method. The random drift is shown in
Figure 13.
The random drift of gyroscope is analyzed with Allan variance, and the Allan standard deviation curve is shown in
Figure 14. The
Figure 14 shows that the random error includes quantization error, zero bias instability, angular random walk and angular rate random walk. Fitting the Allan standard deviation curve by least square method, the error coefficient of angular random walk is 0.355°/h
1/2.
In the experiment, a slight disturbance is exerted to the gyroscope at 3000~4000 s. The sampling frequency is 100 Hz. The sampling time is 6000 s. According to a rule, one of 100 consecutive sampling data is selected as the research sample. And the gyro signal is shown in
Figure 15. The Allan standard deviation curve and the least square fitting curve of the MEMS gyroscope are shown in
Figure 16. We can get the error coefficient of random error by least square fitting. However, the analysis results can not reflect the dynamic changes of signals.
The rectangle window length is chosen as 600. The dynamic Allan variance of MEMS gyro is obtained as shown in
Figure 17.
The quantization noise (QN, Q is a coefficient), angle random walk (ARW, A is a coefficient), bias instability (BI, B is a coefficient), rate random walk (RRW, R is a coefficient), rate ramp (RR, K is a coefficient) are obtained by fitting Allan standard deviation curve with least squares. And the random error is shown in
Figure 18. We can see that the random error analysis results show strong dynamic characteristics.
According to the improved DAVAR algorithm designed above, the sampled signal is analyzed. The kurtosis, sliding kurtosis contribution coefficient, and adaptive window length are shown in
Figure 19.
Figure 19 shows that when the beginning of shock signal is collected by the
L window at 3000 s, the length of the rectangular window begins to decrease gradually until the length of the window is reduced to a minimum
Lmin. And when the beginning of the shock signal is collected by the end of the rectangular window, the length of the rectangular window increases gradually to the maximum length
Lmax. In the interval of the end of the shock signal, there is a slight fluctuation in the signal for a short time due to temperature and electromagnetic interference which leads to reduce the length of the rectangular window in the improved DAVAR method. The sliding kurtosis contribution coefficient highlights the more sensitive ability, such as the peak in
Figure 19. And the window length decreases in the growth interval after 4000 s, so the tracking ability of dynamic Allan variance has improved by the window length decreasing. The measured signals are analyzed with the improved DAVAR method, and the dynamic Allan variance analysis results of the measured signals are as shown in
Figure 20.
The feasibility of the improved DAVAR algorithm is analyzed by taking the angle random walk as the analysis example. The dynamic changes of the angular random walk error coefficient of the measured MEMS gyroscope signal are shown in
Figure 21. We can find that the improved DAVAR algorithm with adaptive window length can be very sensitive to impact signal. And in the stationary interval (0~3000 s, 4000~6000 s), the improved DAVAR analysis results coincide with the DAVAR analysis results obtained from the rectangular window interception signal with a window length of 600. The results of the analysis have good confidence and stability. In the perturbation interval (3000~4000 s), the improved DAVAR analysis results coincide with the DAVAR analysis results obtained from the rectangular window interception signal with a window length of 400. The results of the analysis have good confidence and stability. And the analysis results have good dynamic tracking ability. So the feasibility of the proposed method is verified.
The error of gyro angle random walk is identified by improved DAVAR method. The comparison of confidence level and dynamic tracking ability of the analysis results between improved DAVAR (A-DAVAR), DAVAR-400, and DAVAR-600 is as shown in
Table 2. The Refer value is obtained by the Allan variance in
Figure 16.
In order to further verify the feasibility of the proposed method, change the time of mechanical interference. And the interference is introduced into the gyroscope test at 1000~2000 s and 4000~5000 s. Remove the trend items from the original output and the dynamic random drift is obtained, as shown in
Figure 22.
If the kurtosis threshold is 3.6, 3.45 and 3.3, the rectangular window with a window length of 600 and 400 is used to intercept signal for dynamic Allan variance analysis. The nodes obtained by the window length adjustment according to kurtosis are shown in
Figure 23. As shown in
Figure 23, the closer the kurtosis threshold is to 3, the more sensitive the adjustment will be. But if the kurtosis threshold is too close to 3, the judgement of the stationarity of the signal will be distorted according to kurtosis. For example, when the length of the window is 600 and the kurtosis threshold is 3.3, 735~1539 s is judged to be unstable, and there is a big misjudgement. Therefore, we need to combine the sliding kurtosis contribution coefficient and kurtosis together to determine the stable form of the signal.
We can see the dynamic tracking ability of analysis results is best when the stability threshold of kurtosis is 3.3 in
Figure 23. So adjust the length of a rectangular window only based on kurtosis (brief account DAVAR-K-3.3) as the same as Wang’s method [
12,
13]. The kurtosis and the window length are shown in
Figure 24. In
Figure 24, the stability threshold of kurtosis is 3.3 and the window length in the red circle is not perfect. The ideal situation is that the signal should be intercepted by the rectangle window with 600 window length from 0s to 700 s. At 700 s, the beginning of the rectangular window begins to intercept the 1000 s signal, so the length of the window begins to decrease and the beginning of the rectangular window has been at 1000 s. When the rectangle window moves to 800 s, the length of the window is minimized to 400, at this time the beginning of the rectangular window is still in 1000 s. Then use the rectangular window with a length of 400 to intercept the signal after 1000 s until the movement reaches 1200 s. At 1200 s, the end of the rectangular window begins to intercept the 1000 s signal, the rectangle window length begins to increase, and the end of the rectangular window has been at 1000 s until it moves to 1300 s. And the length of the window grows to the maximum at 1300 s, at this time the end of the rectangular window is still located in 1000 s. The signal should be intercepted by the rectangle window with a 600 window length from 1300 s to 1700 s. This is the most ideal case, with the strongest sensitivity and the highest confidence level at every moment. The process of changing the length of the window is the same as that of the process mentioned above. So the window length in the red circle region influences the analysis results because of the small stability threshold of kurtosis.
The dynamic Allan variance analysis results with DAVAR-K-3.3 are shown in
Figure 25. And the angle random walk obtained by the DAVAR-K-3.3 is shown in
Figure 26.
Do not change the parameters in the algorithm and the sampled signals are analyzed with the improved DAVAR algorithm. The analysis results of kurtosis, sliding kurtosis contribution coefficient and the window length are shown in the
Figure 27. In
Figure 27, the window length has been achieved adjust adaptively and the window length adjustment is close to the ideal situation.
The improved dynamic Allan variance analysis of dynamic random drift signals is shown in the
Figure 28.
Taking the angle random walk as an example, the validation of the proposed method is carried out, and the analysis result is shown in
Figure 29. As shown in
Figure 29, the analysis results of the improved DAVAR algorithm have stronger sensitivity than the DAVAR-600, and they are more stable than the results of DAVAR-400.
The comparison of confidence level and dynamic tracking ability of the analysis results between improved DAVAR, DAVAR-400, DAVAR-600, and DAVAR-K-3.3 is shown in
Table 3.
In
Table 3, the beginning (1000 s) means that the window first sense the 1000 s data, and the window length should decrease at this time. The beginning (1000 s) should be close to DAVAR-600’s beginning (1000 s). The end (1000 s) means that the window lost sense the 1000 s data, and the window length should increase at this time. The end (1000 s) should be close to DAVAR-400’s end (1000 s). The restore 600 (1000 s) means the window length restores to 600 after 1000 s, and the window begins to intercept the signal in stable region after 1000 s, so the restore 600 (1000 s) should be close to the DAVAR-600’s end (1000 s). Other nodes are similar to the above. ARW (2500~3500 s) means the mean value of ARW from 2500 s to 3500 s and, in the stationary interval, the ARW should be close to the refer value.
From
Table 3 and the analysis above, we can see that the improved dynamic Allan variance solves the problem of both confidence and dynamic tracking ability and the analysis results are the closest to the ideal situation in A-DAVAR, DAVAR-400, DAVAR-600, and DAVAR-K-3.3.































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}