1. Introduction
The new generation of Intrusion Detection Systems (IDSs) increasingly demands automated and intelligent network intrusion detection strategies to handle threats caused by an increasing number of advanced attackers in the cyber environment [
1,
2,
3]. In particular, there have been high demands for autonomous agent-based IDS solutions that require as little human intervention as possible while being able to evolve and improve itself (e.g., by taking appropriate actions for a given environment), and to become more robust to potential threats that have not been seen before (e.g., zero-day attacks) [
4].
Reinforcement Learning (RL) has become a popular approach in detecting and classifying different attacks using automated agents. The agent is able to learn different behavior of attacks launched to specific environments and formulates a defense strategy to better protect the environment in the future. An RL approach can improve its capability for protecting the environment by rewarding or penalizing its action after receiving feedback from the environment (e.g., in a trial-and-error interaction to identify what works better with a specific environment). An RL agent is capable of enhancing its capabilities over time. Due to its powerful conception, several RL-based intrusion detection techniques have been proposed in recent years to provide autonomous cyber defense solutions in various contexts and for different application scenarios such as IoT, Wireless Networks [
5,
6], or Cloud [
7,
8,
9]. The RL agent is able to implement the self-learning capabilities during the learning process based on its observation without any supervision requirement, which typically involves the expert knowledge from human [
10]. Many network intrusion detection techniques have been proposed based on this RL concept [
11]. However, most of the existing approaches suffer from the uncertainty in detecting legitimate network traffic with appropriate accuracy and further lacks the capability to deal with a large dataset. This is because an RL agent typically needs to deal with very large learning states and would encounter the state explosion problem. In recent years, deep reinforcement learning (DRL) techniques have been proposed that are capable of learning in an environment with an unmanageable huge number of states to address the main shortcoming of existing RL techniques. DRL techniques such as deep Q-learning have shown to be a promising method to handle the state explosion problem by leveraging deep neural networks during the learning process [
12].
Many DRL-based IDS for network intrusion detection techniques have been proposed in the existing literature, leveraging different types of intrusion datasets to train and evaluate their models [
13,
14]. However, most of these existing proposals only focus on enhancing their detection ability and performance compared to other similar approaches. The majority of these existing works do not offer comprehensive studies as to how best to develop and implement a DRL-based IDS approach for a network environment without providing the precise details, such as how the DQL agent can be formulated based on an RL theory or how to fine-tune hyperparameters for more effective self-learning and interact with the underlying network environment. In this paper, we address these shortcomings by introducing the details of design, development, and implementation strategy for the next generation of the DQL approach for network intrusion detection.
The main contributions of our work are summarized as follows:
We introduce a new generation of network intrusion detection methods that combine a Q-learning based reinforcement learning with a deep feed forward neural network method for network intrusion detection. Our proposed model is equipped with the ongoing auto-learning capability for a network environment it interacts with and can detect different types of network intrusions. Its self-learning capabilities allow our model to continuously enhance its detection capabilities.
We provide intrinsic details of the best approaches involved in fine-tuning different hyperparameters of deep learning-based reinforcement learning methods (e.g., learning rates, discount factor) for more effective self-learning and interacting with the underlying network environment for more optimized network intrusion detection tasks.
Our experimental results, based on the NSL-KDD dataset, demonstrate that our proposed DQL is highly effective in detecting different intrusion classes and outperforms other similar machine learning approaches, achieving more than 90% accuracy in the classification tasks involved in different network intrusion classes.
The rest of the paper is organized as follows.
Section 2 presents the related work.
Section 3 discusses the essential concepts and background associated with reinforcement learning and deep neural network.
Section 4 represents the NSL-KDD dataset used for this paper. The proposed DQL-based anomaly detection approach is given in
Section 5. The evaluation, experimental results, and analysis are given in
Section 6. Finally, we conclude the paper in
Section 7.
2. Related Work
Q-learning, considered to be a model-free method, has been hailed to be a promising approach, especially when utilized in challenging decision processes. This method is appropriate if the other techniques such as traditional optimization methods and supervised learning approaches are not applicable [
15]. The advantages of Q-learning are its effective results, learning capabilities, and the potential combination with other models.
The application of machine learning such as Deep Reinforcement Learning (DRL) [
16,
17,
18], supervised and unsupervised learning, in cybersecurity, has been investigated in various studies [
14,
15,
19,
20]. In [
19], the authors studied a comprehensive review of DRL for cybersecurity. They studied the papers based on the live, real, and simulated environment. In [
20], the authors showed the applications of DRL models in cybersecurity. They mainly focused on the adversarial reinforcement learning methods. They also presented the recent studies on the applications of multi-agent adversarial RL models for IDS systems. In [
14], the authors studied several DRL algorithms such as Double Deep Q-Network (DDQN), Deep Q-Network (DQN), Policy Gradient (PG), and Actor-Critic (AC) to intrusion detection using NSL-KDD [
21] and AWID [
22] datasets. Those datasets were used for training purposes and for classifying intrusion events using the supervised machine learning algorithms. They showed the advantages of using DRL in comparison with the other machine learning approaches, which are the application of DRL on modern data networks that need rapid attention and response. They showed that DDQN outperforms the other approaches in terms of performance and learning.
In [
23,
24], the authors proposed a deep reinforcement learning technique based on stateful Markov Decision Process (MDP), Q-learning. They evaluated the performance of their method based on different factors such as learning episodes, execution time, and cumulative reward and compared the effectiveness of standard planning-based with a deep reinforcement learning based approach.
In [
25], the authors proposed a reinforcement learning agent installed on routers to learn from traffic passing through the network and avoid traffic to the victim server. Moreover, in [
26], the authors proposed a machine learning method to detect multi-step attacks using hidden Markov models to predict the next step of the attacker. In [
27], the authors proposed a decision-theoretic framework named ADRS based on the cost-sensitive and self-optimizing operation to analyze the behavior of anomaly detection and response systems in autonomic networks.
In [
28], the authors combined the multi-objective decision problem with the evolutionary algorithms to make an efficient intrusion response system. They considered an intrusion response system as a multi-attribute decision making problem that takes account of several aspects before responding to the threats such as cost of implementation, resource restriction, and effectiveness of the time, and modification costs. This multi-objective problem tried to find an appropriate response that was able to reduce the values of these functions.
Most of the existing works focused only on the enhancement of their methods to provide better performance and on the evaluation of the performance of the proposed techniques through comparison with other similar machine learning (ML)-based approaches.
6. Evaluation of the DQL Model
In the inner iteration, the DQN agent performs exploration, action selection, and model training based on DQL. Note that each iteration adjusts the Q-function approximator which uses a DNN. In the standard Q-learning, a table of values is kept and the agent separately updates each state-value pair. However, DQN utilizes a deep-learning approach to estimate the Q-function. We leverage a deep neural network as a function approximator for the Q-function. We use a deep neural network consisting of 4-layers as represented in
Figure 2, with ReLU activation for all layers, including the last one to ensure a positive Q-value. Layer one is the input layer, which includes 41 neurons and is fed with the state variables on each iteration. There are 2 hidden layers with the size of 100 each for training purposes, and 1 output layer with the size of 5, which keeps the output layer corresponding to the related Q values for each attack class. Note that after each training iteration based on the states and batch size, the Q values predicted in the output later will be fed into Q vectors (denoted as QV) as illustrated in
Figure 2.
In the DQN learning procedure, there should be an appropriate trade-off between exploitation and exploration. At the first rounds of learning, the exploration rate should be set as a high probability with the value of approximately 1, and gradually decreases using a decoy rate, see
Figure 5. The exploration is performed based on the epsilon-greedy approach. An epsilon-greedy policy is implemented as a training strategy based on reinforcement learning definition which helps the agent to explore all possible actions and find the optimal policy as the number of explorations increases. The action is chosen by applying the epsilon-greedy approach, which selects a random action with a probability of
or predicts the action with a probability of (
).
As the batch size for each state is equivalent to
(defined in
Table 3),
numbers of random actions will be fed into the action vector (AV) as
, where 0–5 denotes Norman (N), Probe (P), DoS (D), U2R (R), and R2L (R), respectively. In the first set of iterations, the probability of choosing random actions is high, but as time passes this probability gets lower by the epsilon-greedy approach, as in
Figure 5. With the probability of
, the DQL agent predicts the actions using the current state (including the first batch with the size of
and state variables). Note that, the amount of
records of the environment denotes the current state. The features (i.e., variable states) of the current state are fed into the input layer of DNN architecture and the Q-values are predicted based on the DNN parameters and weights in the output layer. The action having the highest Q values is selected for each record
i in the current state as
, which can be either normal or malicious based on the four attack types.
In the next step, the action vector (AV) filled by either random actions (i.e., with a higher chance in the first iterations) or predicted actions using DQN (i.e., with higher chance after a while) is fed into the reward function for computing the rewards based on comparing the
with the labels in the dataset for corresponding data-record, see the reward function represented in
Figure 3. Then, the DQL agent needs to compute the Q vectors and action vectors of the next state denoted as
and
for all
to complete the training process and DQL principles as illustrated in
Figure 4. Then, the target Q (denoted as QT) is computed based on the rewards, discount factor for future rewards, and predicted Q vectors as Equation (
4).
The results of
are further fed into the DQN for the training process and computing the loss function as represented in the learning improvement phase in
Figure 3. The training of the neural network is performed with a Mean Square Error (MSE) loss between the Q-value estimated by the neural network for the current state and a target Q value obtained by summing the current reward and the next state’s Q-value multiplied by the value of discount factor (
). The computation of the loss function for the evaluation of the DQN performance is critical. We compute the loss value after each iteration episode for the DQN network based on the current states and target network. The total loss can be denoted as Equation (
5).
Once the training of the model is completed, the trained NN is used for prediction. For each state, the Q-function provides the associated Q-value for each of the possible actions for that specific state. The predicted action is determined based on the maximum Q-value. The model is trained for a number of iterations and episodes, which are enough for covering the complete dataset.
6.1. Experiment Setup and Parameters
We implemented our proposed model in Python using Tensorflow framework version 1.13.2. In our study, we analyzed the performance of our DQL model using NSL-KDD datasets. The training portion of the NSL-KDD dataset includes various samples for the network features and corresponding labels for intrusion with different possible values such as binary or multiclass anomaly. In this paper, we considered the network features as states and the label values as the actions to adapt these elements to DQN concepts.
The parameters and values associated with the DQL model are shown in
Table 3. For the fully connected architecture, we used a total of two hidden layers with ‘relu’ activation function apart from input and output layers. During the training, various major parameters should be determined and examined in order to find the best values that are appropriate and ideal for the model. At the beginning step for training, the exploration rate
, is set to 0.9 for the agent to perform exploration based on some degree of randomness with a decoy rate of 0.99. The initial values for other values such as batch-size and discount factor are illustrated in
Table 3. However, we also evaluate the performance of the DQL model based on different values. We examined the behavior of the proposed DQL agent by varying the discount factor values. This essentially determines how the DQL agent can improve the performance of learning based on future awards.
Figure 6 demonstrates the loss and reward values obtained during the DQL training process based on different values of the discount factor.
Figure 6a,b show the reward and loss values by setting the
as
and
, respectively. As it shows, the loss value is lower in
. However, we increased the learning rate significantly and evaluated the loss and reward values in
Figure 6c,d. The results indicate that a higher value for the discount factor leads to a higher loss value. As it also shows, the loss value in the worst-case reaches
based on
, while it reaches 4 in the higher discount factor value
. However, as demonstrated in
Figure 6, we can observe that reward values have a sharp increasing trend for all discount factor values.
Based on the results obtained during the DQN agent learning process, we discovered that the lower discount factor yields a lower loss value that leads to better results in terms of learning the model, especially when the episode numbers are smaller.
6.2. Performance Metrics
We use different measurements to evaluate the performance of our proposed DQL model used for network intrusion detection, such as Accuracy, Precision, Recall, and F1 score. However, the performance of the model cannot rely only on the accuracy values since it evaluates the percentages of the samples that are correctly classified. It ignores the samples incorrectly classified. To perform better evaluation, we analyzed the results based on the other performance metrics, as follows.
6.2.1. Accuracy
Accuracy is one of the most common metrics to evaluate and judge a model. It measures the total number of correct predictions made out of all the predictions made by the model. It can be obtained based on True Positive (TP) value, True Negative (TN) rate, False Positive (FP) rate, and False Negative (FN) value. Equation (
6) shows the Accuracy metric.
6.2.2. Precision
Precision evaluates can be obtained based on the percentage of positive instances against the total predicted positive instances. In this case, the denominator is the sum of TP and FP, denoting the model prediction performed as positive from the whole dataset. Indeed, it indicates that ‘how much the model is right when it says it is right’, see Equation (
7).
6.2.3. Recall
Recall (Sensitivity) shows the percentage of positive instances against the total actual positive instances. The denominator is the sum of TP and FN values, which is the actual number of positive instances presented in the dataset. It indicates ‘how many right ones the model missed when it showed the right ones’. See Equation (
8).
6.2.4. F1 Score
The harmonic mean of precision and recall values is considered as the F1 score. It considers the contribution of both values. Thus, a higher F1 score indicates better results. Based on the numerator of Equation (
9), if either precision or recall value goes low, the final value of the F1 score also decreases significantly. We can conclude a model as a good one based on the higher value of the F1 score. Equation (
9) shows how the F1 score is computed based on both precision and recall values.
6.3. Performance Evaluation
We evaluated the performance of the DQN on the testing phase based on the parameters set in
Table 3 and training based on 200 episodes.
The confusion matrix for the DQL model based on two different discount factors of
and
are shown in
Figure 7. The confusion matrix represented the evaluation of our model for the test data set. The rows in the confusion matrix are associated with the predicted class and the columns indicate the true class. The confusion matrix cells on the main diagonal demonstrate the correctly classified percentages such as those having been classified as TP or TN. However, the incorrectly classified portion is located in the off-diagonal cells such as FN and FP values. The values located on the last columns (most right columns) indicate the percentages of incorrectly classified predictions corresponding to each class. Considering the confusion matrices, we observe that the true-positive rate for normal, DoS, and Probe classes for
has decreased from 0.96 to 0.82, and 0.68 to 0.93, 0.89, and 0.57 for
, respectively. This shows that the DQL agent performs better for the smaller values of discount factor
compared to larger discount factor value such as
. However, the results for the minority class of R2L are very low because of unbalanced distributions of the number of samples for each class (see
Table 1).
Figure 8 shows the performance of the proposed DQL model for the correct estimations (TP and TN) together with FP and FN values based on the number of samples. The results are captured after performing 200 episodes for the agent’s learning with the discount factor of
. Considering the graph, we observe higher correct estimations for Normal, DoS, and Probe classes, respectively, while these values are lower for the minority classes due to the unbalanced distribution of class samples.
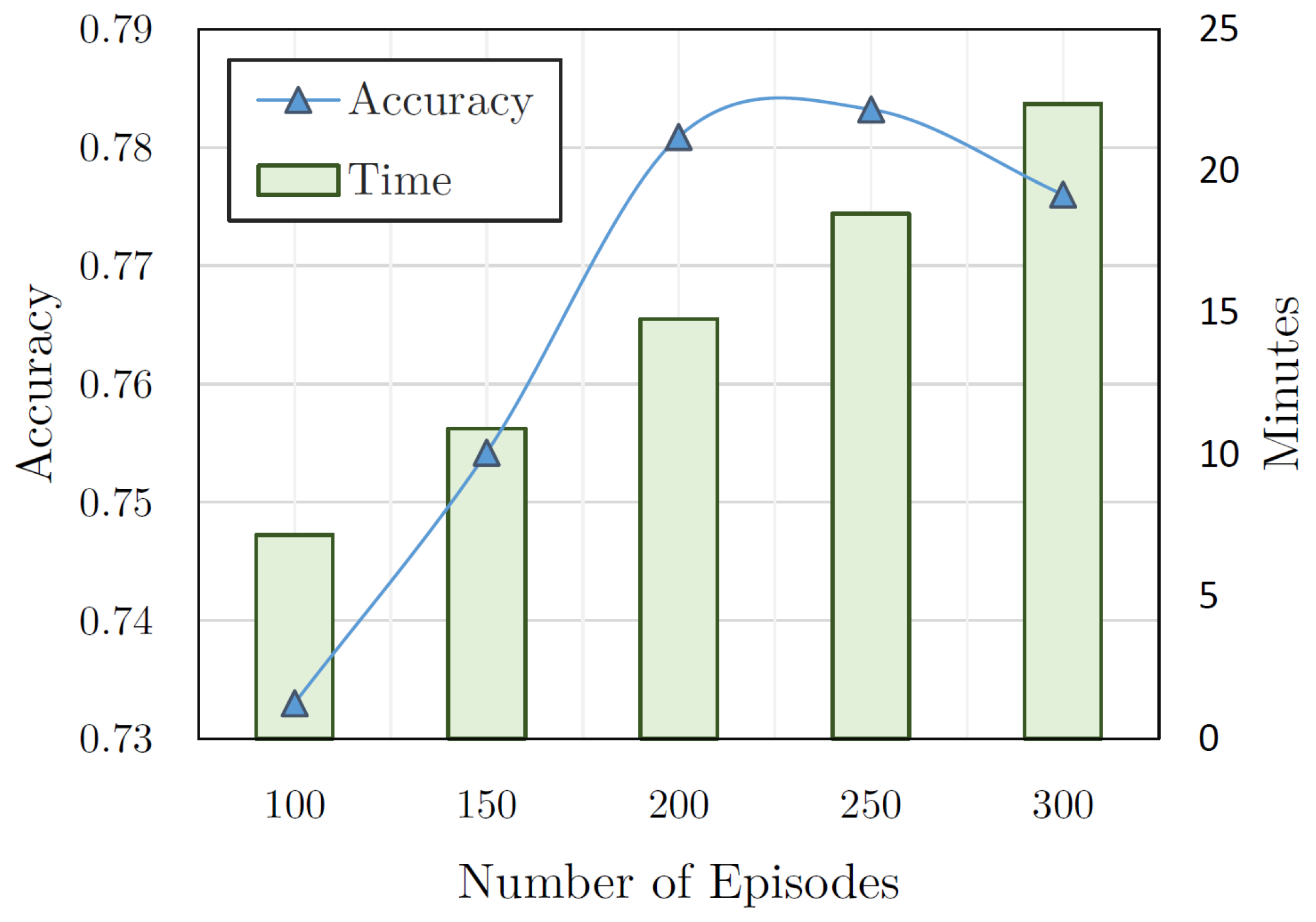
We evaluated the performance or DQL model based on both accuracy and time against the different numbers of training episodes in
Figure 9. We can observe that the accuracy value has an ascending trend from 100 episodes to 250 episodes. However, this value decreased to 300 episodes, while training based on 300 episodes lasts more than 20 min. It shows that the best number of episodes for the DQL agent for training is 250 episodes, which take a smaller execution time of around 17 min based on our implementation.
Table 4 compares the overall performance of the DQL based on two different discount factors in the DQL training process. The results show that all performance metrics have higher values for the smaller value of discount factor
.
Table 5 shows the performance metrics for each class separately while the DQL model is trained based on 200 episodes with the discount factor
.
6.4. Comparison with Other Approaches
In this section, we compare the results obtained from our proposed DRL models with various common ML-based models based on NSL-KDD datasets. We compare the results with Self-organizing Map (SOM), Support Vector Machine (SVM), Random Forest (RF), Naive Bayes (NB), Convolutional Neural Network (CNN), and some hybrid models such as BiLSTM and CNN-BiLSTM models presented in different studies [
33,
34,
35].
We compare the results based on the performance metrics such as Accuracy, Recall, F1 Score, and Precision.
Table 6 compares the accuracy and training time (in minutes) with other studies in the literature.
As it shows, our model has a higher accuracy compared with the other approaches, while it has a lower training time. However, the worst accuracy obtained by the SVM approach is about 68%. Both BiLSTM and CNN-BiLSTM hybrid approaches have high accuracy of 79% and 83%, respectively. However, those approaches have a higher training time than our model.
Table 7 compares our model’s performance in terms of F1-score for all classifications with other studies in the literature. F1-score is known as a balance point between recall and precision scores and can be considered as the harmonic average of both recall and precision. Based on the results summarized in
Table 7, the F1-score for the Normal class reaches about
in our study while this value is higher for CNN and CNN-BiLSTM hybrid approaches, with values of around
. However, it can be seen that our models perform better in terms of other attack classes such as DoS, Probe, R2L compared with other ML-based and hybrid approaches in the literature. It can be seen that the RF method has the lowest value compared to the other approaches.
7. Conclusions
We present a Deep Q-learning based (DQL) reinforcement learning model to detect and classify different network intrusion attack classes. The proposed DQL model takes a labeled dataset as input, then provides a deep reinforcement learning strategy based on deep Q networks.
In our proposed model, a Q-learning based reinforcement learning is combined with a deep feed-forward neural network to interact with the network environment, where network traffic is captured and analyzed to detect malicious network payloads in a self-learning fashion by DQL agents using an automated trial-error strategy without requiring human knowledge. We present the implementation of our proposed method in detail, including the basic elements of DQL such as the agent, the environment, together with the other concepts such as the quality of actions (Q-values), epsilon-greedy exploration, and rewards. To enhance the learning capabilities of our proposed method, we analyzed various (hyper) parameters of the DQL agent such as discount factor, batch size, and the number of learning episodes to find the best fine-tuning strategies to self-learn for network intrusion tasks.
Our experimental results demonstrated that the proposed DQL model can learn effectively from the environment in an autonomous manner and is capable of classifying different network intrusion attack types with high accuracy. Through the extensive experiments on parameter fine-tuning, we confirmed that the best discount factor for our proposed method should be 0.001 with 250 episodes of learning.
For future work, we plan to deploy our proposed method on a realistic cloud-based environment [
36,
37] to enable the DQL agent to improve its self-learning capabilities and classify the threats with high accuracy in a real-time manner. We plan to apply our proposed model in improving the self-learning capabilities in detecting Android-based malware [
38] and ransomware [
39] to test the generalizability and practicability of our model. We also plan to deploy our proposed model in other applications such as outlier detection of indoor air quality applications [
40].















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}