


Authority Transfer According to a Driver Intervention Intention Considering Coexistence of Communication Delay
Korea Institute of Industrial Technology, Gwangju 61012, Republic of Korea
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Computers 2023, 12(11), 228; https://doi.org/10.3390/computers12110228
Submission received: 26 September 2023
/
Revised: 27 October 2023
/
Accepted: 30 October 2023
/
Published: 8 November 2023
(This article belongs to the Topic Electronic Communications, IOT and Big Data)
Abstract
:Recently, interest and research on autonomous driving technology have been actively conducted. However, proving the safety of autonomous vehicles and commercializing autonomous vehicles remain key challenges. According to a report released by the California Department of Motor Vehicles on self-driving, it is still hard to say that self-driving technology is highly reliable. Until fully autonomous driving is realized, authority transfer to humans is necessary to ensure the safety of autonomous driving. Several technologies, such as teleoperation and haptic-based approaches, are being developed based on human-machine interaction systems. This study deals with teleoperation and presents a way to switch control from autonomous vehicles to remote drivers. However, there are many studies on how to do teleoperation, but not many studies deal with communication delays that occur when switching control. Communication delays inevitably occur when switching control, and potential risks and accidents of the magnitude of the delay cannot be ignored. This study examines compensation for communication latency during remote control attempts and checks the acceptable level of latency for enabling remote operations. In addition, supplemented the safety and reliability of autonomous vehicles through research that reduces the size of communication delays when attempting teleoperation. It is expected to prevent human and material damage in the actual accident situation.
1. Introduction
With the advent of the 4th Industrial Revolution, autonomous driving technology is developing [1,2]. Many companies are researching and developing autonomous driving technology, and there is a great interest in autonomous driving as many open sources such as Autoware and Apollo are provided [3,4,5,6]. However, autonomous driving technology still has many problems. In Figure 1, Autonomous driving technology is still unstable, according to a report released in 2022 on the lifting of autonomous driving by the California Department of Motor Vehicles [7].
Due to the instability of autonomous driving technology, we are facing many problems such as safety, laws, and regulations [8,9,10,11]. Also, there are many variables on real roads. There are many things to consider, such as erased lanes, broken traffic lights, damaged road surfaces, and sensor errors due to bad weather. To improve this problem, many studies are being conducted as a means to assist autonomous driving, such as monitoring, haptic, and teleoperation [12,13,14,15,16]. Teleoperation is used in many places such as Mars exploration robots and rescue robots [17,18].
However, teleoperation through these robots is not suitable for roads. Teleoperation on the road has many things to consider, such as traffic rules, sudden obstacles, pedestrians, etc. [19]. It is necessary to comply with the rules of lane and signal and to move the autonomous vehicle to an optimal safe place in the field. Taking into the SAE J3016:2021, and BSIPAS 1880:2 accounts, the teleoperation can be divided into three teleoperation stages which are remote driving, remote assistance, and remote monitoring [20,21].
The concept of teleoperation, for example, is shown as Figure 2 of the vehicle can be largely classified into three ideas which are: direct control, shared control, and trajectory guidance [22]. Firstly, the concept of direct control which represents a human operator handling the sensing data, and the planning of the vehicle trajectory, directly provides control to the vehicle [23,24]. Second, shared control allows remote drivers to gain control of autonomous vehicles through control commands such as steering, brake, and throttle [22,25]. Finally, the trajectory guidance allows the vehicle to drive through the route presented by the remote driver received from the estimated route and trajectory planning [22].
This study proposes a way to solve the problem through teleoperation by taking control of the vehicle in situations where the driver needs to intervene, such as hardware, software, and emergencies in which the autonomous vehicle is driving on the road.
In addition, when attempting teleoperation, communication delays between the autonomous vehicle and the teleoperated inevitably occur [26,27]. Communication delay that occurs when teleoperation is operated is a potential threat. Ignoring delays and attempting remote manipulation will lead to even greater accidents. One of the key functions when attempting to remotely operate a vehicle is to detect the intention of the remote operator to intervene in the operation. In the preceding study, the remote operator manipulates the steering to detect the driver’s intention to intervene and transfer the control of the vehicle to the remote operator [16,28]. In addition, to compensate for the instability of system performance due to communication delays, there is also a study through a predictor model that predicts and compensates for delays [26,27,29,30].
Through this study, we would like to compensate for communication delays caused by taking control of autonomous vehicles and talk about the allowable range of communication delays that allow autonomous driving.
Contribution
The contribution of the study is shown below:
- Control authority transfer is regarded as a crucial aspect of autonomous driving until full-automation technologies are fully commercialized. Despite dedicated efforts to transfer authority from autonomous vehicles to local human drivers, some remain unclear when it comes to scenarios including utilizing the teleoperation of the remote vehicle. Due to this fact, in this study, a control transfer mechanism was proposed to compensate for the communication delay between the remote vehicle and the control center to guarantee control transfer within a specific required time. In addition, not only the proposed method can be applied to the scenarios containing the teleoperation of ground vehicles, but it can also be applied to the field that the application is targeting wireless teleoperation of mobile robots, surgical robots, and so on.
- One another aspect of this study is that it is based on actual measured communication delays. As long as the communication was constructed based on wireless communication, inherently it contains passive and erroneous communication delay latency. Therefore, in this study, we measured an actual communication delay between the remote vehicle and the control center to reference and manage the parameters that supplement the proposed control transfer algorithm. In the future, large-scale deployment scenarios can be expected including valet parking service, minimum risk state takeover when autonomous is in malfunctioning state, and so on.
2. Methodology
There are several considerations for the teleoperation of autonomous vehicles.
First, we need to confirm the location of the decision of the transfer of control. We need to talk about where to give commands to transfer control, such as whether control is handed over from an autonomous vehicle or whether control is taken from a control center. Figure 3a,b as shows process according to decide 88 to hand over control, that the result of the control transfer differs depending on the control 89 location.
Second, it is necessary to consider the communication delay that occurs when attempting teleoperation. It is necessary to check how to compensate for the communication delay that occurs in the process of transferring control, and to set standards for how much delay is allowed [26,30]. Finally, as shown in Figure 4, the remote driver operates the steering during autonomous driving and transfer control, indicating that the autonomous vehicle needs to detect the driver’s intervention intentions. There are many ways to bring control, but this study adopted a method in which the autonomous vehicle detects the driver’s intention to intervene and hands over control by the remote driver manipulating the steering wheel. In previous studies, Sonoda et.al’s research was conducted as follows. the research of Sonoda et.al was conducted on local vehicles [16]. It may not be sufficient in a system for remotely controlling autonomous vehicles. Firstly, the presence of communication delays can result in delayed reaction times and uncertain criteria for remote controllability, depending on the magnitude of the communication delay. Secondly, by far of the author’s knowledge, no method is proposed for transferring control from the autonomous driving vehicle to the remote operator and back to autonomous driving. teleoperation is appropriate when there is no problem with the Automatic Driving System (ADS), but it is uncertain to transfer control to the local vehicle when there is a problem with the ADS. However, assuming the technological advancements and sufficient safety of the ADS, it would be feasible to assume control during situations such as traffic congestion or parking, where the driver needs to take over. Therefore, in this study, in addition to the research of Sonoda et.al, we aim to provide criteria for tolerating certain levels of communication delay during control transfer and discuss potential strategies to address this issue [16].
2.1. Driver Intervention Intention
When the driver intervenes in the ADS operation by using the steering wheel, the system shifts from AD mode to shared authority mode. It is assumed that the ADS controls the vehicle with a proportional-differential (PD) controller for the lateral control of the vehicle [31]:
where
2.2. Control Transfer Mechanism
When the system initiates control transfer from the vehicle to the teleoperator, the proportional gain of the lateral control of the vehicle is changed by the following:
where
When communication delays co-exist, according to the magnitude of the communication delay, there is a chance that control transfer may not be finished in time. Therefore, in this study, the authority transferring method considering the communication delay is proposed. is the initial parameter for the p, is the gain parameter to increase the p to transfer the authority fast, and is the communication delay at time t.
where
As shown in Figure 5, an authority transfer is initiated after an intervention is started. However, when communication delays co-exist, according to the magnitude of the communication delay, there is a chance that control transfer may not be finished in time. From the red dotted line in Figure 5, the value is delayed by delay and is again compensated by Equation (3) with the ideal control transmission value.
3. Experiment
In this section, an experimental setup is shown.
General Setup
To gather the communication delay profiles, a 5G/LTE modem and ethernet network are used (UX-50C, LG, Republic of Korea). Also, GPS is used to compute the communication delay between the control center and the teleoperated vehicle (PA1616S, Adafruit, New York, NY, USA) with an external GNSS antenna (GPS ACTIVE 28 dB, Changhong, China). As for the middle operational system, ROS-noetic is used (Ubuntu, 20.04 LTS). Finally, to control the simulation vehicle, a wheel joystick (G29, Logitech, Swiss) was used. In addition, Matlab (R2019 a, Mathworks) is used to demonstrate the teleoperated vehicle in the framework of the vehicle dynamics block set.
Table 1 shows the proportional gain with the magnitude change of the communication delay from 34 ms to 500 ms.
4. Result
4.1. Communication Delay
Figure 6 shows a communication delay profile gathered between the control center and the teleoperated vehicle. The x-axis represents time and the y-axis represents the probability density. The mean value of the communication delay was 34 ms and the maximum value was 325 ms.
4.2. Authority Transfer of Outer and Inner Controller
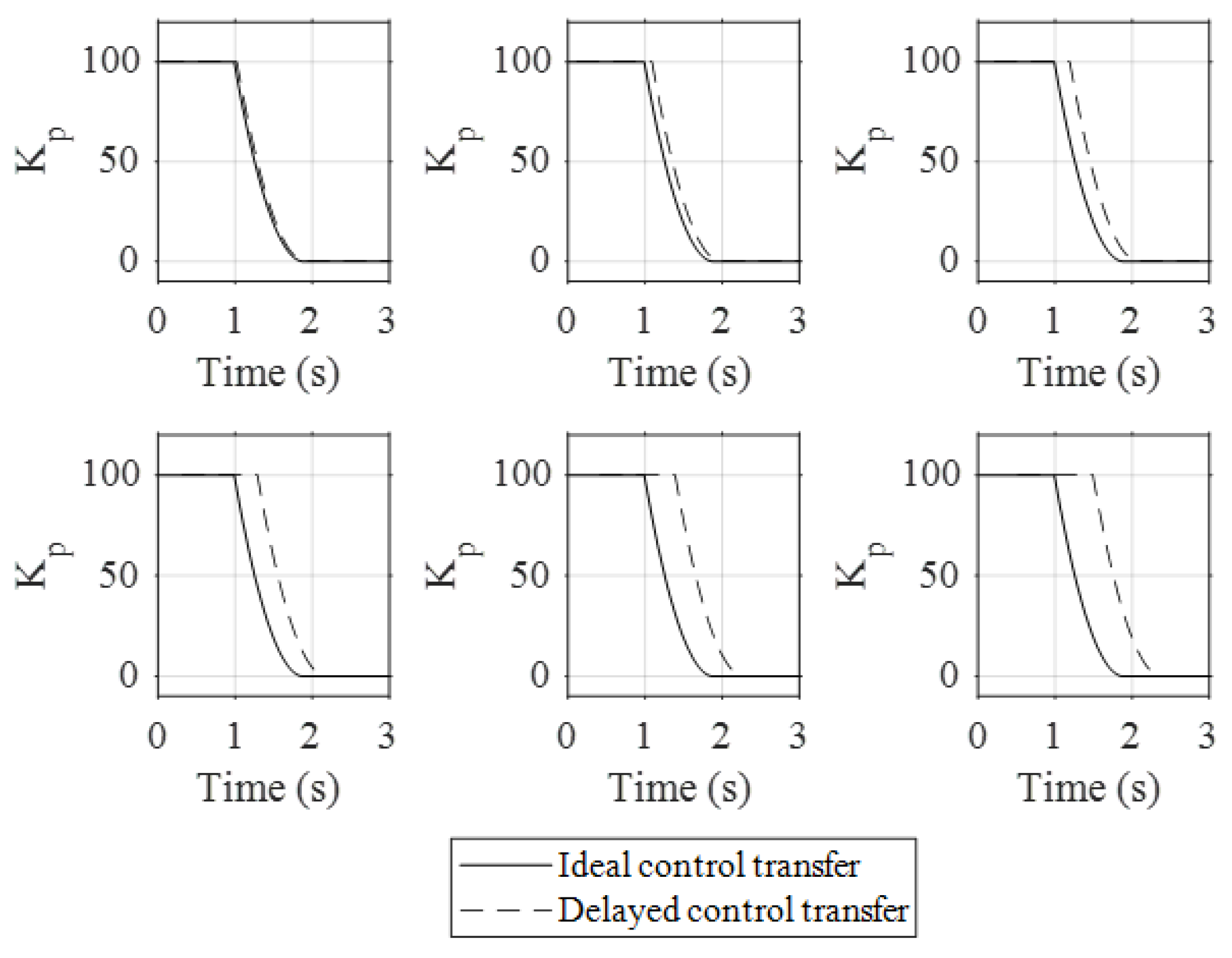
Two types of methods can be considered to compensate for communication delays during control transmission. First, Figure 7 used an inner transfer controller, and Figure 8 an outer transfer controller. The x-axis represents time and the y-axis represents proportional gain. In addition, the solid line represents the ideal control transfer result and the dotted line represents the delayed control transfer result due to the influence of the communication. outer transfer controllers have irregular results compared to inner transfer controllers.
4.3. Authority Transfer According to the Communication Delay
Figure 9 shows the proportional gain with the change in communication delay size from 34 ms to 500 ms shown in Table 1. This figure shows that the greater the communication delay, the more difficult it is to transfer permissions on time. The solid line represents the ideal control transfer and the dotted line represents the delay control transfer.
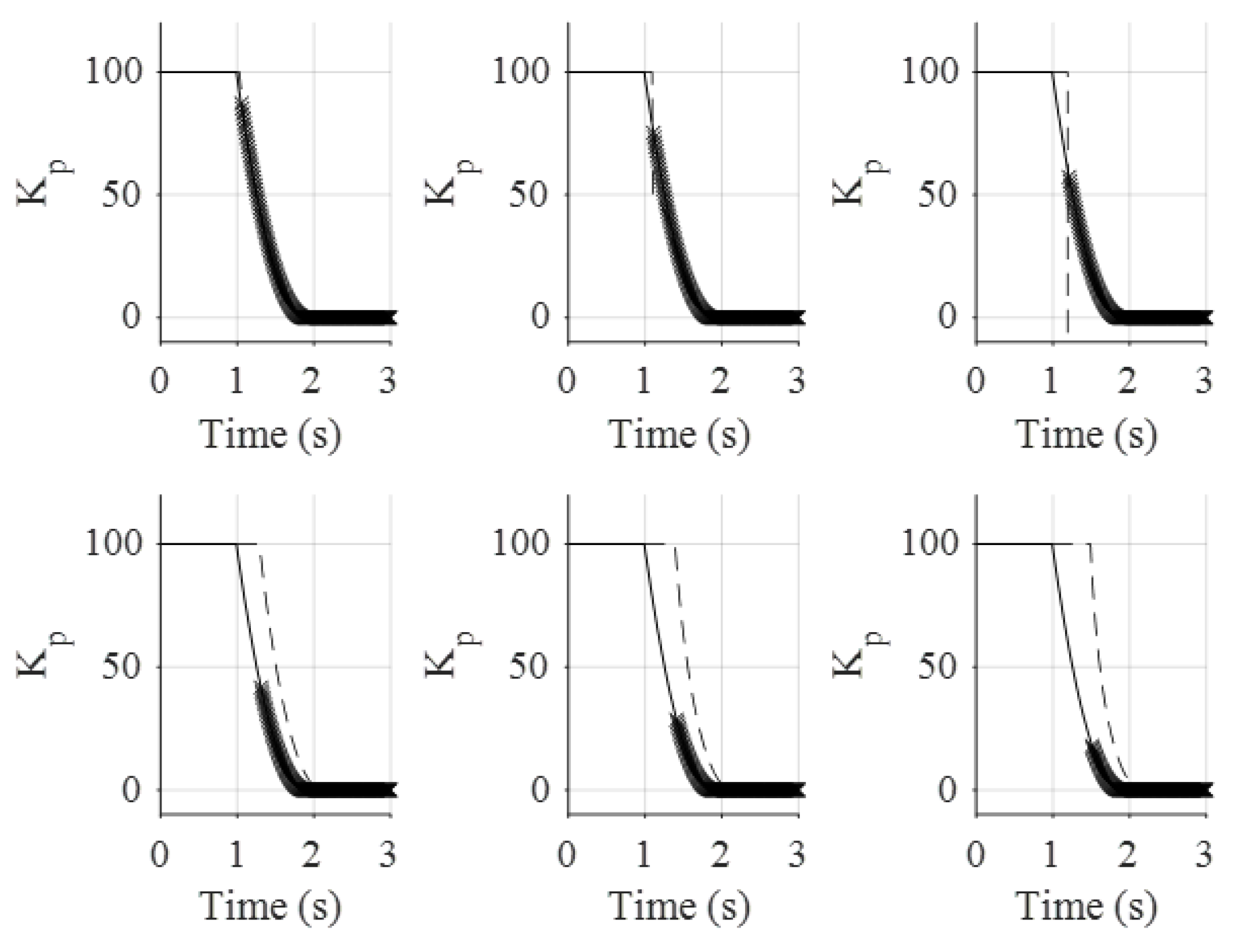
4.4. Simulation Results Based on Condition
This section shows the results of the proposed method of intervening in the self-driving vehicle to hand over control. Indicates the amount of communication delay based on the change in the gain value. The solid line in the graph represents the ideal control transfer, and the dotted line represents the delayed control transfer. The x marker corrects the delayed control transmission according to the proposed method.
Figure 10 is the simulation result value reflecting the change amount of G shown in Table 2. I changed the G value from 5 to 100. show the most ideal results when we reflect 22.
Figure 11 shows the simulation results based on the change amount of shown in Table 3. changed the value from 100 to 3000, and the value of 1000 looks most stable.
Figure 12 is the simulation result value reflecting the change amount of G shown in Table 4. changed the G value from 0.1 to 1.0. The delay transmission shown in dotted lines is rapidly changing with the change of . When the driver intervenes, there is a risk of an accident when the control is suddenly transferred and the vehicle is safely evacuated. show the most ideal results when we reflect 0.5.
4.5. Control Transition Method Using the Proposed Method
Table 5 shows Figure 13 by referring to the simulation results according to the previous conditions and reflecting the most stable results. The solid line represents the ideal control transfer and the dotted line represents the delayed control transfer. The x marker shows the result of the recovered control transfer. The proposed method compensates for communication delays and allows for stable teleoperation through smoother control transfer.
5. Discussions
5.1. Communication Delay Depending on Control Position
In Figure 7 and Figure 8 communication delay according to the location of the control transfer. Transferring the control transition from the inside was more stable than controlling the vehicle exterior switching. However, it is hard to say that giving control commands inside the vehicle is unconditionally good. Depending on the operation method and environment, it seems that the control location should be considered appropriately.
5.2. Criteria for Communication Delays That Allow Teleoperation
Figure 9 shows the check the result value according to the amount of change in communication delay that occurs when the control is transferred from the autonomous vehicle. Communication delay increased sharply at 500 ms. However, it is necessary to establish a clear standard for teleoperation depending on the delay size by acquiring driving data through the subject in subsequent studies.
5.3. Teleoperation Method Considering Communication Delay
Figure 13 delay can be compensated through the proposed method by applying arbitrary delay. As shown in the table, we set the experimental value from 34 ms to 500 ms, and the result is the same as the image. This allows remote drivers to step in to take control of the vehicle, evacuate the vehicle to safety, or replace it in urgent situations.
5.4. How to Protect against Malicious Cyberattacks
Communication security is one of the important parts when attempting teleoperation. A malicious attack from the outside can cause another accident. There are several ways to solve these problems.
Protecting against malicious cyberattacks originating from external sources during teleoperation operations encompasses several key strategies. These strategies include the utilization of firewalls for the meticulous management of network connections and the incorporation of Virtual Private Networks (VPNs) to ensure secure data transmission. Furthermore, authentication and authorization management play a pivotal role in verifying remote users’ identities and administering their permissions, thereby enhancing overall security. The implementation of network monitoring and intrusion detection systems aids in identifying anomalous activities, consequently fortifying security measures. Routine application of security patches and updates serves to rectify known vulnerabilities, while user education and training foster heightened cybersecurity awareness. Employing encryption technology ensures the secure protection of data, while integrity checks verify the integrity of systems and data, thus effectively detecting unauthorized alterations. The involvement of Red Teams and penetration testing helps in the discovery of vulnerabilities and the enhancement of security measures. Lastly, the formulation of an incident response plan allows for swift and effective responses in the event of a cyberattack.
6. Conclusions
Communication delays inevitably occur when transferring authority from the autonomous vehicle to the remote driver. research is needed to reduce communication delays. In this study, we confirmed the teleoperation method considering the communication delay between the autonomous vehicle and the control center. Especially, when communication delays coexist, authority transfer can be delayed due to the communication delay and may potentially not be able to control the vehicle immediately in emergency status. Commercialization of autonomous driving technology requires demonstrating safety and reliability. To compensate for this, we believe that teleoperation can prevent unforeseen accidents. In particular, teleoperation will play a big role in lanes where there are many things to consider, such as road conditions and signal rules. autonomous driving vehicles will be commercialized in the near future, and research on teleoperation to compensate for this should also be actively conducted. A lot of research should be done, such as compensating for the aforementioned communication delays and two-way control. However, it is also important that communication delay can be influenced by various driving conditions such as rain, snow, network bandwidth, and also regions. Therefore, a careful parameter should be chosen to guarantee control transfer can be fulfilled within the required time.
Author Contributions
Conceptualization, T.L. and M.H.; methodology, T.L.; software, T.L. and E.K.; validation, T.L., M.H. and H.C.; formal analysis, H.C.; investigation, M.H.; resources, H.C.; data curation, T.L. and E.K; writing—original draft preparation, T.L.; writing—review and editing, T.L.; visualization, T.L. and M.H.; supervision, H.C.; project administration, E.K.; funding acquisition, H.C. All authors have read and agreed to the published version of the manuscript.
Funding
This study has been conducted with the support of the Korea Evaluation Institute of Industrial Technology as “Development of an industrial skateboard with longitudinal and transverse expansion operations” (Grant number: KEIT 20022022).
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Andalibi, M.; Shourangizhaghighi, A.; Hajihosseini, M.; Madani, S.S.; Ziebert, C.; Boudjadar, J. Design and Simulation-Based Optimization of an Intelligent Autonomous Cruise Control System. Computers 2023, 12, 84. [Google Scholar] [CrossRef]
- Teixeira, F.B.; Ferreira, B.M.; Moreira, N.; Abreu, N.; Villa, M.; Loureiro, J.P.; Cruz, N.A.; Alves, J.C.; Ricardo, M.; Campos, R. A novel simulation platform for underwater data muling communications using autonomous underwater vehicles. Computers 2021, 10, 119. [Google Scholar] [CrossRef]
- Sun, P.; Kretzschmar, H.; Dotiwalla, X.; Chouard, A.; Patnaik, V.; Tsui, P.; Guo, J.; Zhou, Y.; Chai, Y.; Caine, B.; et al. Scalability in perception for autonomous driving: Waymo open dataset. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 2446–2454. [Google Scholar]
- Kato, S.; Takeuchi, E.; Ishiguro, Y.; Ninomiya, Y.; Takeda, K.; Hamada, T. An open approach to autonomous vehicles. IEEE Micro 2015, 35, 60–68. [Google Scholar] [CrossRef]
- Kato, S.; Tokunaga, S.; Maruyama, Y.; Maeda, S.; Hirabayashi, M.; Kitsukawa, Y.; Monrroy, A.; Ando, T.; Fujii, Y.; Azumi, T. Autoware on board: Enabling autonomous vehicles with embedded systems. In Proceedings of the 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), Porto, Portugal, 11–13 April 2018; pp. 287–296. [Google Scholar]
- Raju, V.M.; Gupta, V.; Lomate, S. Performance of open autonomous vehicle platforms: Autoware and Apollo. In Proceedings of the 2019 IEEE 5th International Conference for Convergence in Technology (I2CT), Bombay, India, 29–31 March 2019; pp. 1–5. [Google Scholar]
- State of California Department of Motor Vehicle. Autonomous Vehicle Disengagement Reports 2022; State of California Department of Motor Vehicle: Sacramento, CA, USA, 2022.
- Gless, S.; Silverman, E.; Weigend, T. If robots cause harm, who is to blame? Self-driving cars and criminal liability. New Crim. Law Rev. 2016, 19, 412–436. [Google Scholar] [CrossRef]
- De Bruyne, J.; Werbrouck, J. Merging self-driving cars with the law. Comput. Law Secur. Rev. 2018, 34, 1150–1153. [Google Scholar] [CrossRef]
- Anderson, J.M.; Nidhi, K.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Autonomous Vehicle Technology: A Guide for Policymakers; Rand Corporation: Santa Monica, CA, USA, 2014. [Google Scholar]
- Sivak, M.; Schoettle, B. Road Safety with Self-Driving Vehicles: General Limitations and Road Sharing with Conventional Vehicles; Technical Report; University of Michigan, Ann Arbor, Transportation Research Institute: Ann Arbor, MI, USA, 2015. [Google Scholar]
- Bhardwaj, A.; Ghasemi, A.H.; Zheng, Y.; Febbo, H.; Jayakumar, P.; Ersal, T.; Stein, J.L.; Gillespie, R.B. Who’s the boss? Arbitrating control authority between a human driver and automation system. Transp. Res. Part F Traffic Psychol. Behav. 2020, 68, 144–160. [Google Scholar] [CrossRef]
- Benloucif, M.A.; Nguyen, A.T.; Sentouh, C.; Popieul, J.C. A new scheme for haptic shared lateral control in highway driving using trajectory planning. IFAC-PapersOnLine 2017, 50, 13834–13840. [Google Scholar] [CrossRef]
- Abbink, D.A.; Mulder, M.; Boer, E.R. Haptic shared control: Smoothly shifting control authority? Cogn. Technol. Work 2012, 14, 19–28. [Google Scholar] [CrossRef]
- Flemisch, F.; Heesen, M.; Hesse, T.; Kelsch, J.; Schieben, A.; Beller, J. Towards a dynamic balance between humans and automation: Authority, ability, responsibility and control in shared and cooperative control situations. Cogn. Technol. Work 2012, 14, 3–18. [Google Scholar] [CrossRef]
- Sonoda, K.; Okada, K.; Sato, K.; Abe, G.; Wada, T. Does Shared Mode Improve Steering and Vehicle Motions during Control Transition from Automated to Manual Driving in Real Passenger Car? IEEE Access 2022, 10, 85880–85890. [Google Scholar] [CrossRef]
- Huntsberger, T.; Rodriguez, G.; Schenker, P.S. Robotics challenges for robotic and human mars exploration. Robotics 2000, 2000, 340–346. [Google Scholar]
- Lindemann, R.A.; Voorhees, C.J. Mars Exploration Rover mobility assembly design, test and performance. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005; Volume 1, pp. 450–455. [Google Scholar]
- Kang, L.; Zhao, W.; Qi, B.; Banerjee, S. Augmenting self-driving with remote control: Challenges and directions. In Proceedings of the 19th International Workshop on Mobile Computing Systems & Applications, Tempe, AZ, USA, 12–13 February 2018; pp. 19–24. [Google Scholar]
- SAE-J3016; Surface Vehicle Recommended Practive, Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems. SAE International: Warrendale, PA, USA, 2018.
- BSIPAS1880:2; Centre for Connected and Autonomous Vehicles: Guidelines for Developing and Assessing Control Systems for Automated Vehicles. British Standards Institution: London, UK, 2020.
- Majstorović, D.; Hoffmann, S.; Pfab, F.; Schimpe, A.; Wolf, M.M.; Diermeyer, F. Survey on Teleoperation Concepts for Automated Vehicles. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 1290–1296. [Google Scholar]
- Bensoussan, S.; Parent, M. Computer-aided teleoperation of an urban vehicle. In Proceedings of the 1997 8th International Conference on Advanced Robotics. Proceedings. ICAR’97, Monterey, CA, USA, 7–9 July 1997; pp. 787–792. [Google Scholar]
- Gnatzig, S.; Chucholowski, F.; Tang, T.; Lienkamp, M. A System Design for Teleoperated Road Vehicles. In Proceedings of the International Conference on Informatics in Control, Automation and Robotics, Reykjavík, Iceland, 29–31 July 2013; Volume 2, pp. 231–238. [Google Scholar]
- Qiao, B.; Li, H.; Wu, X. Intelligent-assist algorithm for remote shared-control driving based on game theory. J. Shanghai Jiaotong Univ. (Sci.) 2021, 26, 615–625. [Google Scholar] [CrossRef]
- Zheng, Y.; Brudnak, M.J.; Jayakumar, P.; Stein, J.L.; Ersal, T. A predictor-based framework for delay compensation in networked closed-loop systems. IEEE/ASME Trans. Mechatronics 2018, 23, 2482–2493. [Google Scholar] [CrossRef]
- Bemporad, A. Predictive control of teleoperated constrained systems with unbounded communication delays. In Proceedings of the 37th IEEE Conference on Decision and Control (Cat. No. 98CH36171), Tampa, FL, USA, 18 December 1998; Volume 2, pp. 2133–2138. [Google Scholar]
- Wada, T.; Kondo, R. Shared authority mode: Connecting automated and manual driving for smooth authority transfer. In Proceedings of the Internatioanl Symposium on Future Active Safety Technology toward Zero Traffic Accident (FAST-Zero), Nara, Japan, 18–21 September 2017. [Google Scholar]
- Schimpe, A.; Diermeyer, F. Steer with me: A predictive, potential field-based control approach for semi-autonomous, teleoperated road vehicles. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Zheng, Y.; Brudnak, M.J.; Jayakumar, P.; Stein, J.L.; Ersal, T. Evaluation of a predictor-based framework in high-speed teleoperated military UGVs. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 561–572. [Google Scholar] [CrossRef]
- Saito, T.; Wada, T.; Sonoda, K. Control authority transfer method for automated-to-manual driving via a shared authority mode. IEEE Trans. Intell. Veh. 2018, 3, 198–207. [Google Scholar] [CrossRef]
Figure 1.
California Department of Motor Vehicles in 2022 Report on Autonomous Driving Disengagement.
Figure 1.
California Department of Motor Vehicles in 2022 Report on Autonomous Driving Disengagement.

Figure 2.
Example of the teleoperation which controls teleoperated vehicle using 5G/LTE network. Camera scenes are transmitted after compression and sent to the control center within about 43 ms on average.
Figure 2.
Example of the teleoperation which controls teleoperated vehicle using 5G/LTE network. Camera scenes are transmitted after compression and sent to the control center within about 43 ms on average.

Figure 3.
The control transfer mechanism is according to the location of the transfer controller. There are two types of handover controllers, depending on the location, to compensate for communication delays when issuing control commands. (a) represents the Inner transport controller, and (b) represents the Outer transport controller.
Figure 3.
The control transfer mechanism is according to the location of the transfer controller. There are two types of handover controllers, depending on the location, to compensate for communication delays when issuing control commands. (a) represents the Inner transport controller, and (b) represents the Outer transport controller.

Figure 4.
When the driver intervenes in the ADS operation by using the steering wheel, the system shifts from Autonomous driving (AD) mode to shared authority mode. When the driving mode changes depending on the strength of the and the request to intervene (RTI) starts on the automated section, the control authority is transferred to the driver.
Figure 4.
When the driver intervenes in the ADS operation by using the steering wheel, the system shifts from Autonomous driving (AD) mode to shared authority mode. When the driving mode changes depending on the strength of the and the request to intervene (RTI) starts on the automated section, the control authority is transferred to the driver.

Figure 5.
Control transfer using a proportional-differential controller for the lateral control of the vehicle. denotes the proportional gain of the controller. When a communication delay exists, depending on the magnitude of the communication delay, is modified to complete authority transfer in time.
Figure 5.
Control transfer using a proportional-differential controller for the lateral control of the vehicle. denotes the proportional gain of the controller. When a communication delay exists, depending on the magnitude of the communication delay, is modified to complete authority transfer in time.

Figure 6.
Communication delay measured between a control center and a teleoperated vehicle. The mean value of the communication delay was 34 ms and the maximum value was 325 ms.
Figure 6.
Communication delay measured between a control center and a teleoperated vehicle. The mean value of the communication delay was 34 ms and the maximum value was 325 ms.

Figure 7.
Diagram which indicates an authority transfer affected by the communication delay when a control command is issued using an inner transfer controller.
Figure 7.
Diagram which indicates an authority transfer affected by the communication delay when a control command is issued using an inner transfer controller.

Figure 8.
Diagram which indicates an authority transfer affected by the communication delay when a control command is issued using an outer transfer controller.
Figure 8.
Diagram which indicates an authority transfer affected by the communication delay when a control command is issued using an outer transfer controller.

Figure 9.
Simulation result value according to delay change. The x-axis is time, the y-axis is proportional gain.
Figure 9.
Simulation result value according to delay change. The x-axis is time, the y-axis is proportional gain.

Figure 10.
Simulation result value according to the amount of change in the value of G.

Figure 11.
Simulation result value according to the amount of change in the value of .

Figure 12.
Simulation result value according to the amount of change in the value of .

Figure 13.
Result value using the proposed control command method. The solid lines on the graph represent the ideal control transmission and the dotted lines represent the delayed control transmission. The x marker indicates the compensated control transmission. The driver’s intervention starts in one second.
Figure 13.
Result value using the proposed control command method. The solid lines on the graph represent the ideal control transmission and the dotted lines represent the delayed control transmission. The x marker indicates the compensated control transmission. The driver’s intervention starts in one second.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Simluation conditions used in the experiment.
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 22 | - | 0.5 |
| 2 | 100 | 22 | - | 0.5 |
| 3 | 200 | 22 | - | 0.5 |
| 4 | 300 | 22 | - | 0.5 |
| 5 | 400 | 22 | - | 0.5 |
| 6 | 500 | 22 | - | 0.5 |
Table 2.
Simulation result value according to the amount of change in the value of G.
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 5 | 1000 | 0.5 |
| 2 | 100 | 10 | 1000 | 0.5 |
| 3 | 200 | 22 | 1000 | 0.5 |
| 4 | 300 | 30 | 1000 | 0.5 |
| 5 | 400 | 50 | 1000 | 0.5 |
| 6 | 500 | 100 | 1000 | 0.5 |
Table 3.
Simulation result value according to the amount of change in the value of .
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 22 | 100 | 0.5 |
| 2 | 100 | 22 | 300 | 0.5 |
| 3 | 200 | 22 | 700 | 0.5 |
| 4 | 300 | 22 | 1000 | 0.5 |
| 5 | 400 | 22 | 2000 | 0.5 |
| 6 | 500 | 22 | 3000 | 0.5 |
Table 4.
Simulation result value according to the amount of change in the value of .
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 22 | 1000 | 0.1 |
| 2 | 100 | 22 | 1000 | 0.3 |
| 3 | 200 | 22 | 1000 | 0.5 |
| 4 | 300 | 22 | 1000 | 0.7 |
| 5 | 400 | 22 | 1000 | 0.9 |
| 6 | 500 | 22 | 1000 | 1.0 |
Table 5.
Conditions for issuing control commands considering communication delays.
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 22 | 1000 | 0.5 |
| 2 | 100 | 22 | 1000 | 0.5 |
| 3 | 200 | 22 | 1000 | 0.5 |
| 4 | 300 | 22 | 1000 | 0.5 |
| 5 | 400 | 22 | 1000 | 0.5 |
| 6 | 500 | 22 | 1000 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Lim, T.; Hwang, M.; Kim, E.; Cha, H. Authority Transfer According to a Driver Intervention Intention Considering Coexistence of Communication Delay. Computers 2023, 12, 228. https://doi.org/10.3390/computers12110228
AMA Style
Lim T, Hwang M, Kim E, Cha H. Authority Transfer According to a Driver Intervention Intention Considering Coexistence of Communication Delay. Computers. 2023; 12(11):228. https://doi.org/10.3390/computers12110228
Chicago/Turabian StyleLim, Taeyoon, Myeonghwan Hwang, Eugene Kim, and Hyunrok Cha. 2023. "Authority Transfer According to a Driver Intervention Intention Considering Coexistence of Communication Delay" Computers 12, no. 11: 228. https://doi.org/10.3390/computers12110228
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.