
On the Impact of GPS Multipath Correction Maps and Post-Fit Residuals on Slant Wet Delays for Tracking Severe Weather Events

 , , , , and
, , , , and
Abstract
:1. Introduction
2. GPS Network and Data Analysis
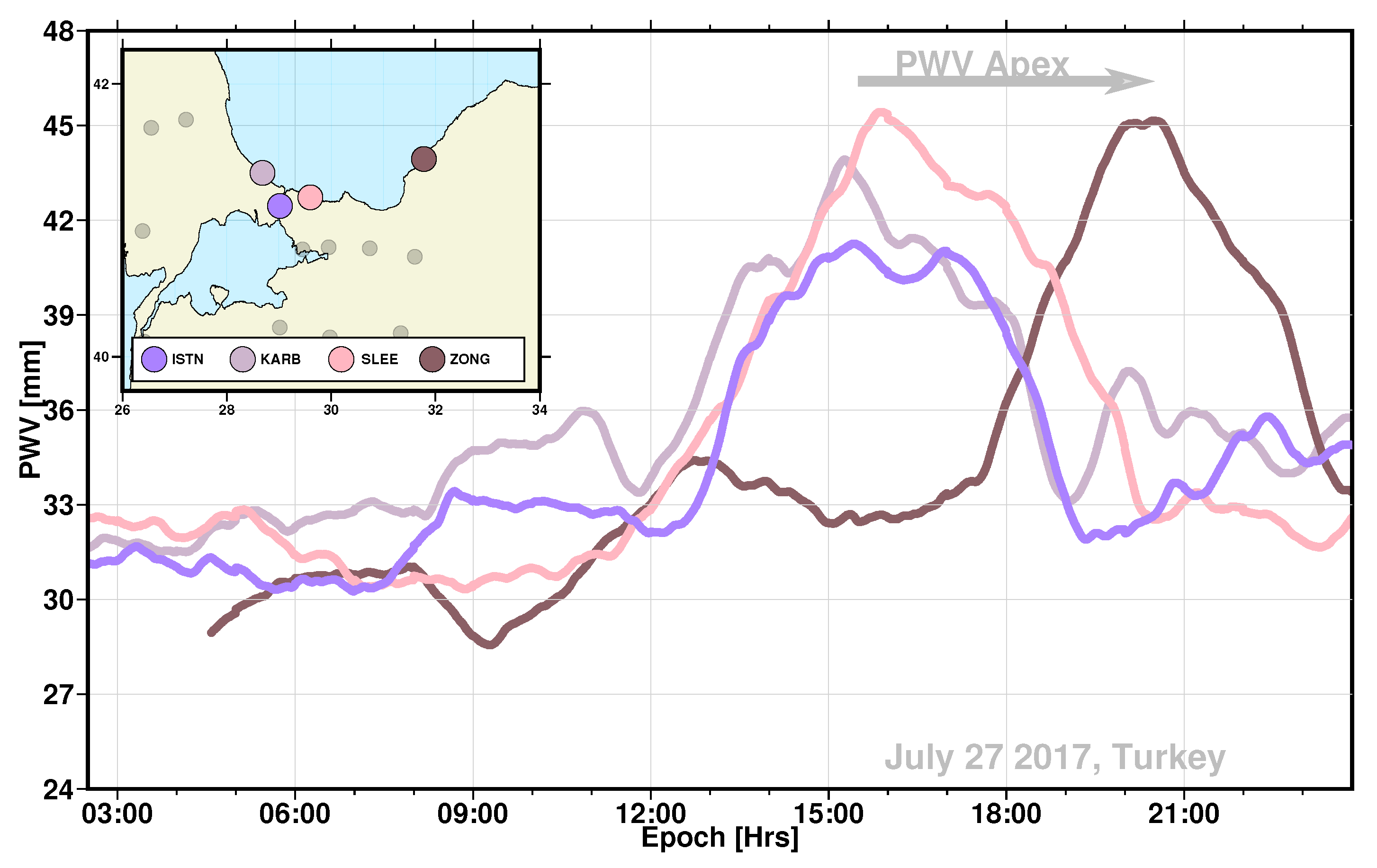
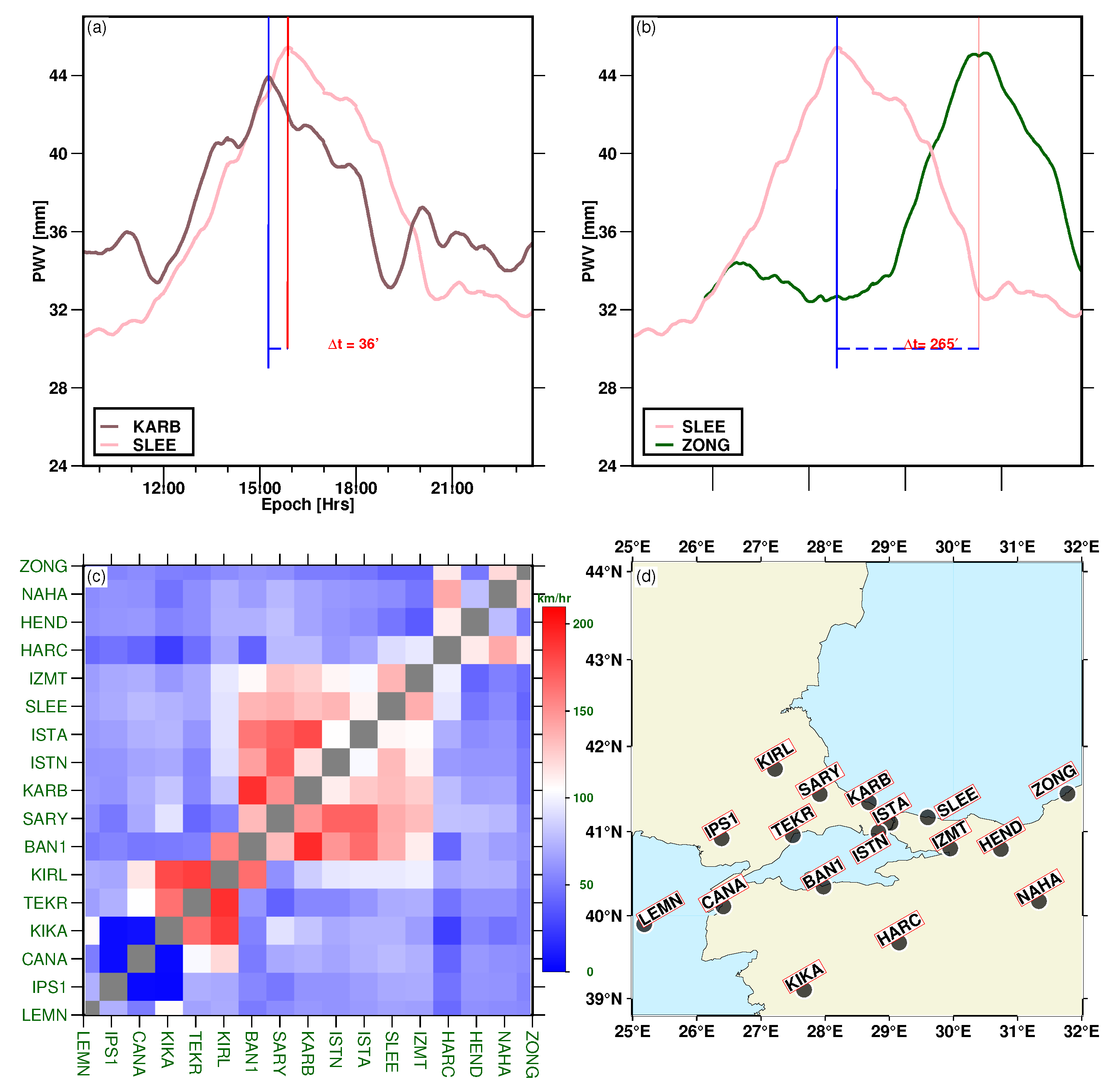
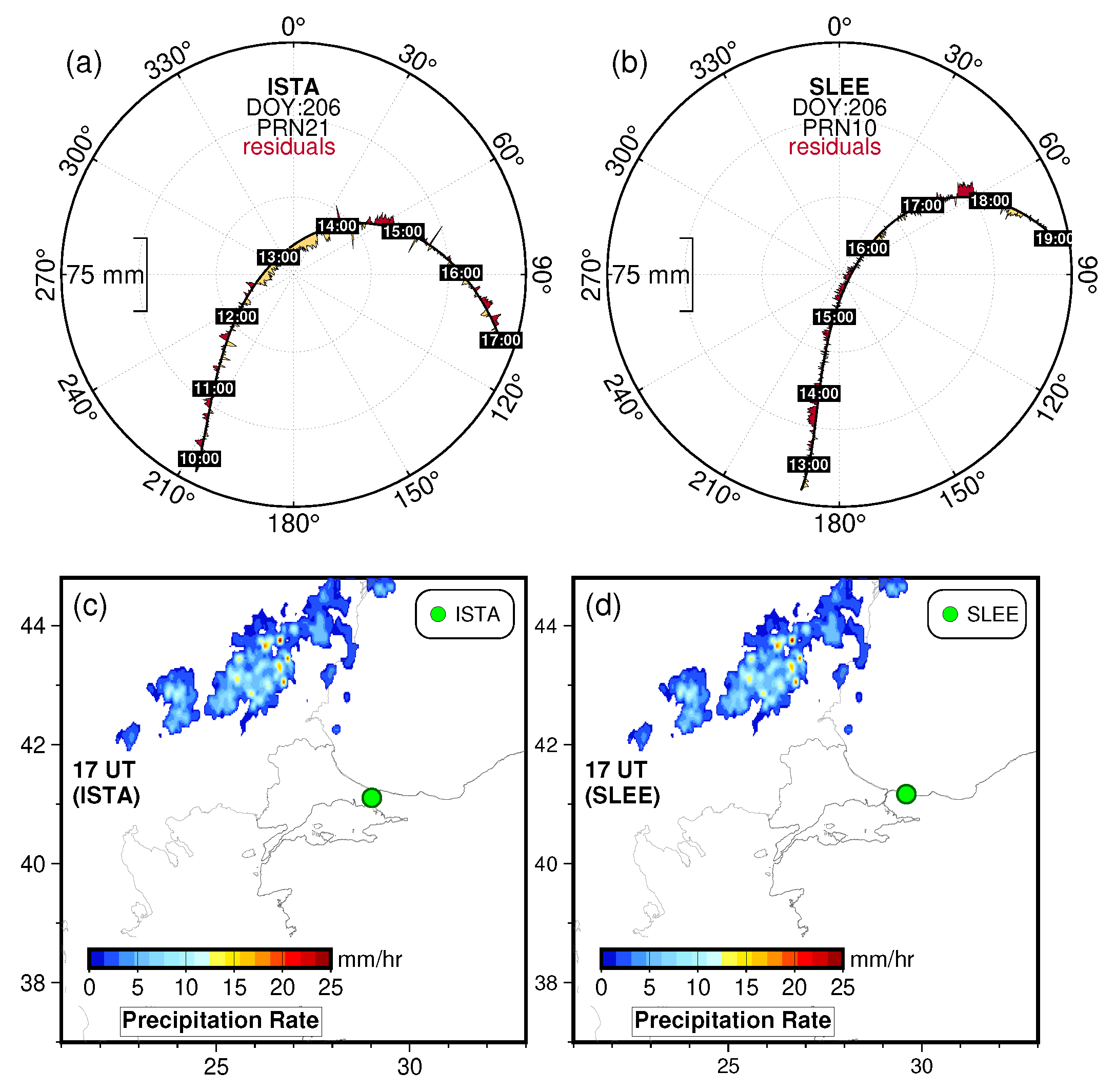
3. Severe Weather Event on 27 July 2017, in Istanbul/Turkey
4. Slant Delay Estimates from the NWP Model—ERA5 Reanalysis Data
5. Construction of Multipath Stacking (MPS) Maps during Severe Weather
6. Retrieval of Integrated Slant Total Delay from GPS
7. Results
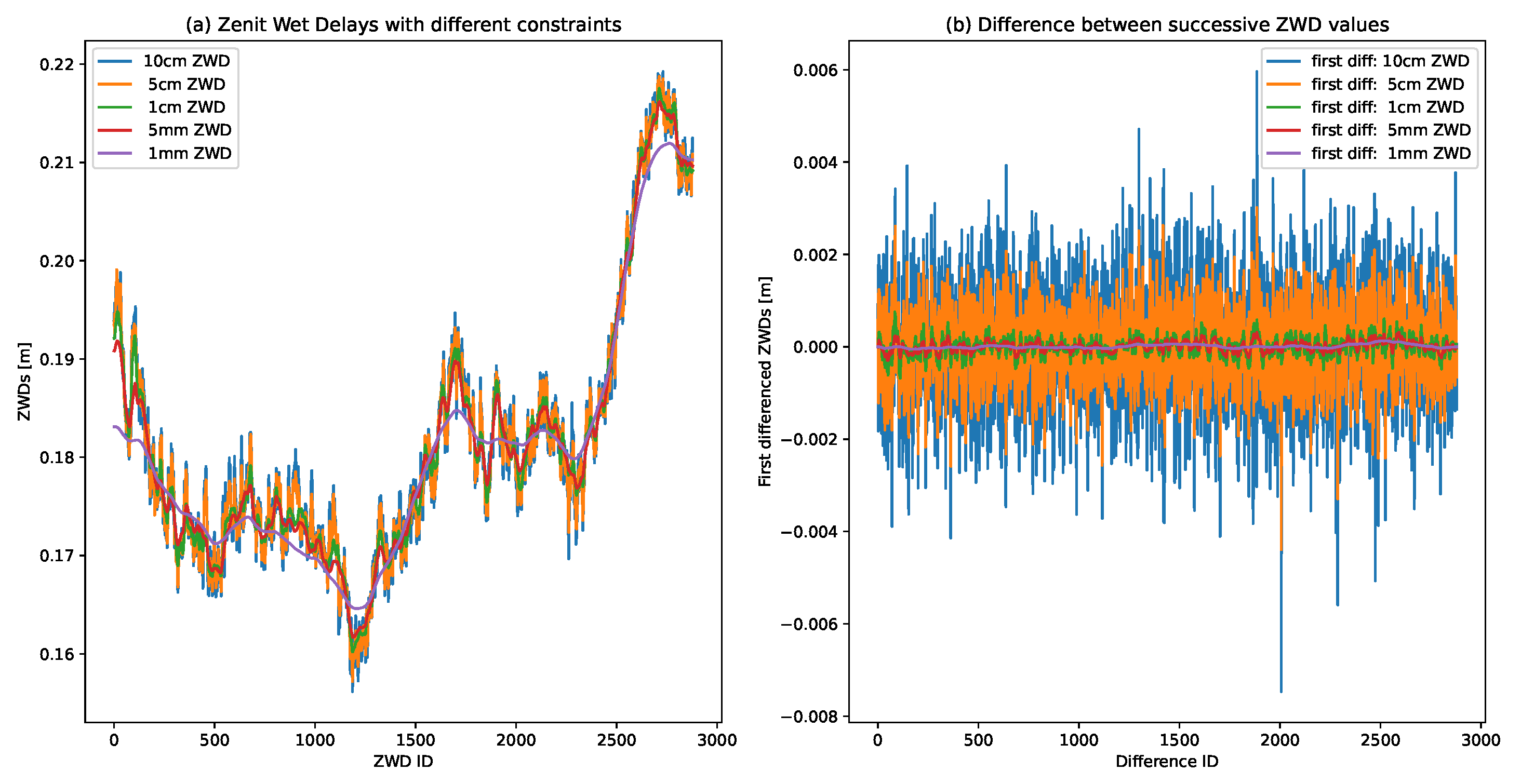
7.1. Zenith Wet Delay
7.2. Exploring Post-Fit Residuals
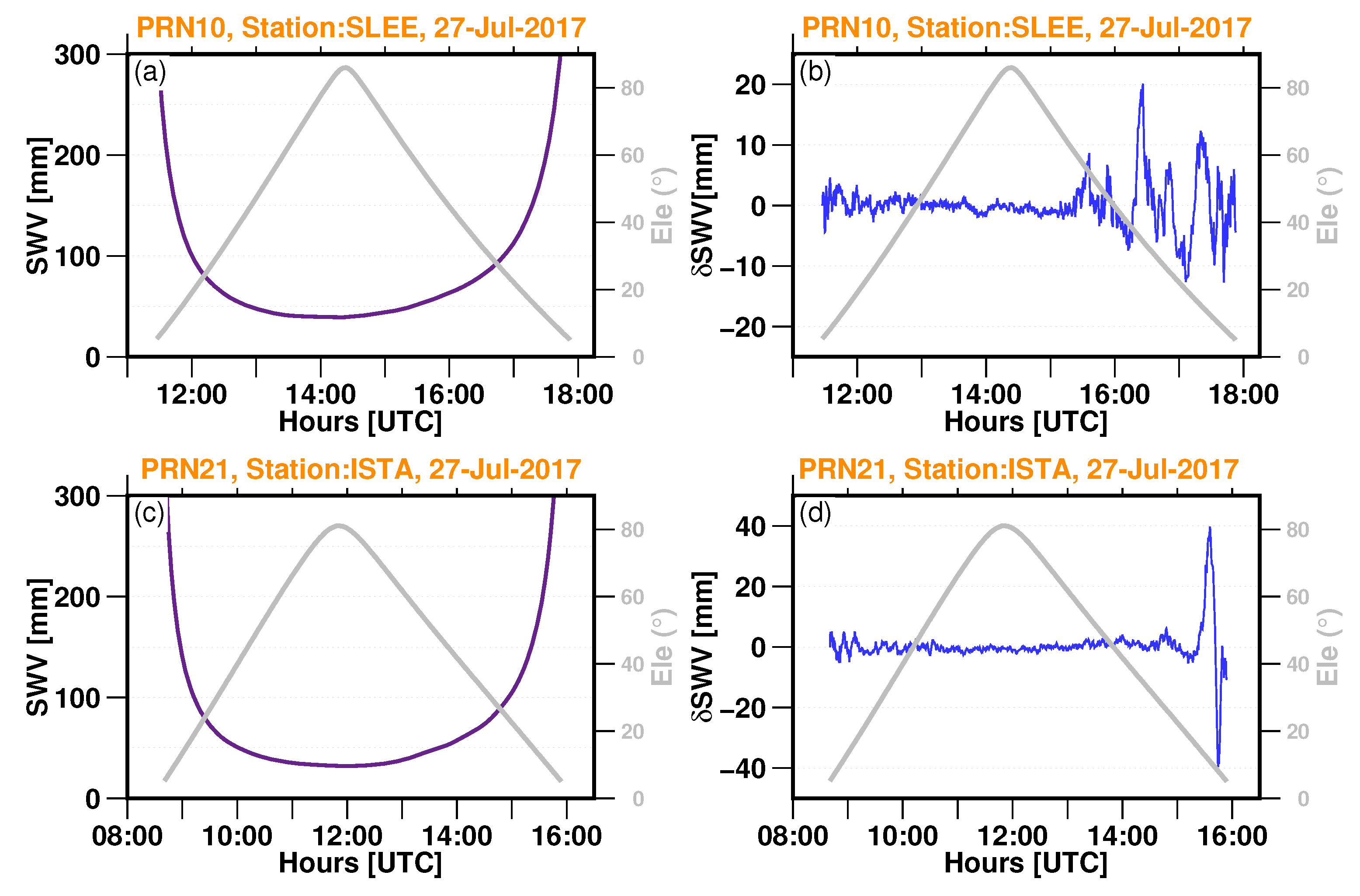
7.3. Isotropic and Anisotropic Slant Perceptible Water Vapour
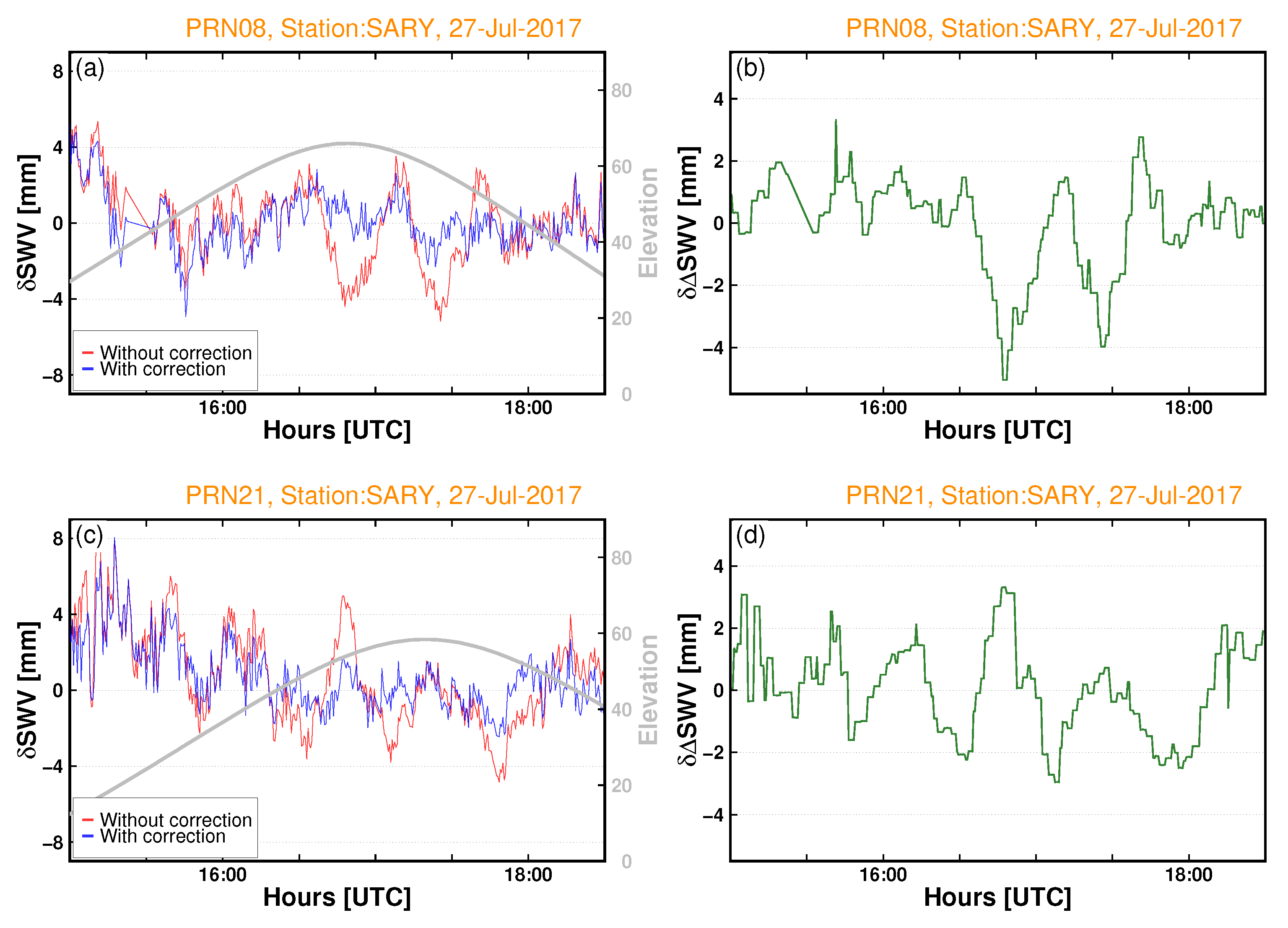
7.4. Influence of the MPS on the Anisotropic Perceptible Slant Water Vapour
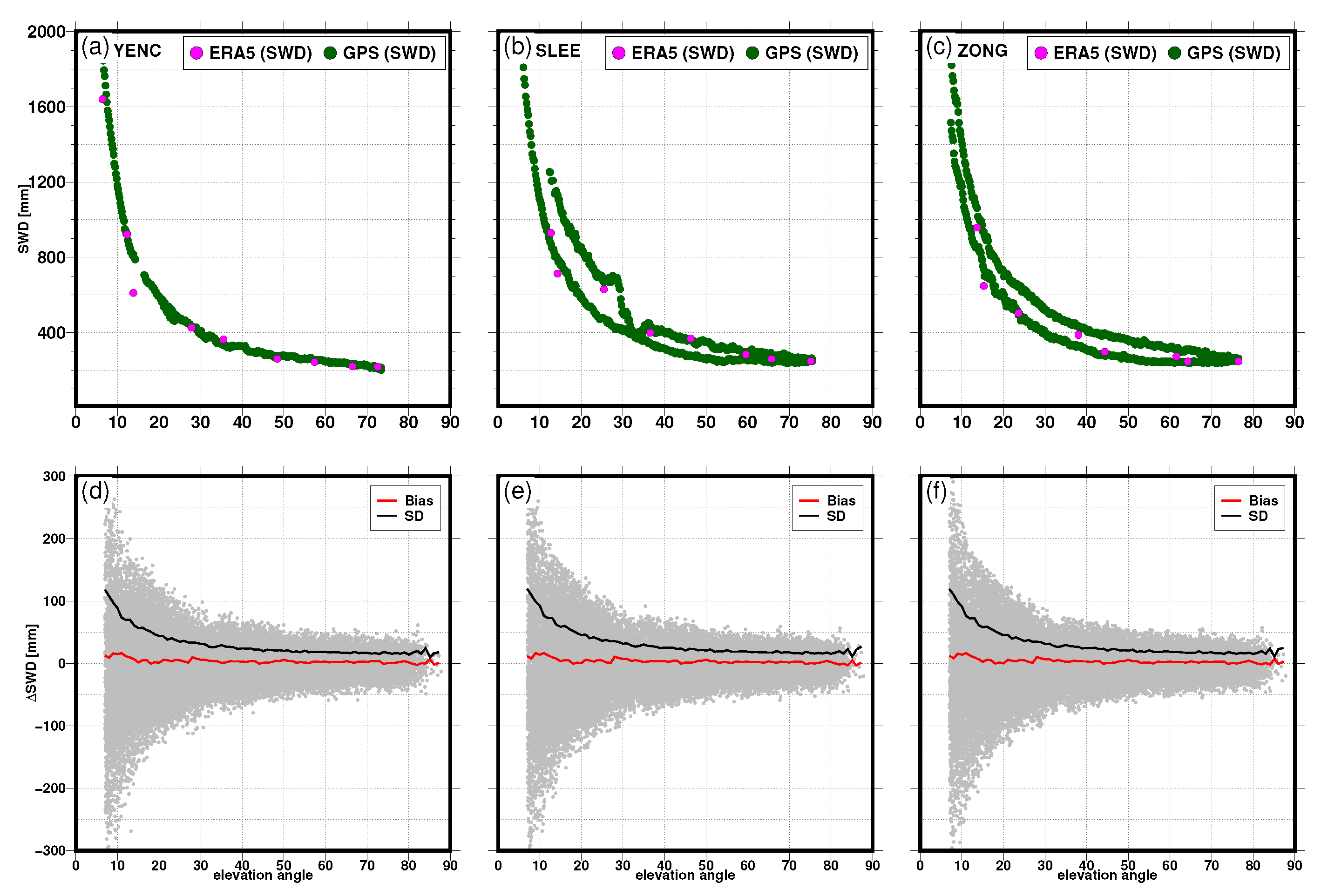
8. Validation Comparisons of GPS-Based Slant Water Vapour with ERA5
9. Discussion
10. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liang, X.Z. Extreme rainfall slows the global economy. Nature 2022, 601, 193–194. [Google Scholar] [CrossRef] [PubMed]
- IPCC. Fifth Assessment Report (AR5): Climate Change 2013/2014. Climate Change 2014: Impacts, Adaptation, and Vulnerability; Cambridge University Press: New York, NY, USA, 2014; OCLC: 956694305. [Google Scholar]
- Trenberth, K.E.; Smith, L. The Mass of the Atmosphere: A Constraint on Global Analyses. J. Clim. 2005, 18, 864–875. [Google Scholar] [CrossRef]
- Houghton, J.T.; Callander, B.A.; Varney, S.K.; Intergovernmental Panel on Climate Change (Eds.) Climate Change 1992: The Supplementary Report to the IPCC Scientific Assessment; Cambridge University Press: Cambridge, UK; New York, NY, USA, 1992. [Google Scholar]
- Ahrens, C.D.; Samson, P.J. Extreme Weather and Climate, 1st ed.; Brooks/Cole, Cengage Learning: Belmont, CA, USA, 2010. [Google Scholar]
- Jones, J.; Guerova, G.; Douša, J.; Dick, G.; Haan, S.d.; Pottiaux, E.; COST Association (Eds.) Advanced GNSS Tropospheric Products for Monitoring Severe Weather Events and Climate: COST Action ES1206 Final Action Dissemination Report; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Baltaci, H. Meteorological characteristics of dust storm events in Turkey. Aeolian Res. 2021, 50, 100673. [Google Scholar] [CrossRef]
- Brenot, H.; Ducrocq, V.; Walpersdorf, A.; Champollion, C.; Caumont, O. GPS zenith delay sensitivity evaluated from high-resolution numerical weather prediction simulations of the 8–9 September 2002 flash flood over southeastern France. J. Geophys. Res. 2006, 111, D15105. [Google Scholar] [CrossRef] [Green Version]
- Moore, A.W.; Small, I.J.; Gutman, S.I.; Bock, Y.; Dumas, J.L.; Fang, P.; Haase, J.S.; Jackson, M.E.; Laber, J.L. National Weather Service Forecasters Use GPS Precipitable Water Vapor for Enhanced Situational Awareness during the Southern California Summer Monsoon. Bull. Am. Meteorol. Soc. 2015, 96, 1867–1877. [Google Scholar] [CrossRef]
- Champollion, C.; Masson, F.; Bouin, M.N.; Walpersdorf, A.; Doerflinger, E.; Bock, O.; Van Baelen, J. GPS water vapour tomography: Preliminary results from the ESCOMPTE field experiment. Atmos. Res. 2005, 74, 253–274. [Google Scholar] [CrossRef] [Green Version]
- Singh, R.; Ojha, S.P.; Puviarasan, N.; Singh, V. Impact of GNSS Signal Delay Assimilation on Short Range Weather Forecasts Over the Indian Region. J. Geophys. Res. Atmos. 2019, 124, 9855–9873. [Google Scholar] [CrossRef]
- Iwabuchi, T.; Rocken, C.; Wada, A.; Kanzak, M. True Real-time Slant Tropospheric Delay Monitoring System with Site Dependent Multipath Filtering. In Proceedings of the 24th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION) GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 579–587. [Google Scholar]
- Ducrocq, V.; Ricard, D.; Lafore, J.P.; Orain, F. Storm-Scale Numerical Rainfall Prediction for Five Precipitating Events over France: On the Importance of the Initial Humidity Field. Weather. Forecast. 2002, 17, 1236–1256. [Google Scholar] [CrossRef]
- Benevides, P.; Catalao, J.; Miranda, P.M.A. On the inclusion of GPS precipitable water vapour in the nowcasting of rainfall. Nat. Hazards Earth Syst. Sci. 2015, 15, 2605–2616. [Google Scholar] [CrossRef] [Green Version]
- Benevides, P.; Catalao, J.; Nico, G. Neural Network Approach to Forecast Hourly Intense Rainfall Using GNSS Precipitable Water Vapor and Meteorological Sensors. Remote Sens. 2019, 11, 966. [Google Scholar] [CrossRef]
- Hocke, K.; Navas-Guzman, F.; Moreira, L.; Bernet, L.; Mätzler, C. Diurnal Cycle in Atmospheric Water over Switzerland. Remote Sens. 2017, 9, 909. [Google Scholar] [CrossRef] [Green Version]
- Shoji, Y.; Kunii, M.; Saito, K. Assimilation of Nationwide and Global GPS PWV Data for a Heavy Rain Event on 28 July 2008 in Hokuriku and Kinki, Japan. SOLA 2009, 5, 45–48. [Google Scholar] [CrossRef] [Green Version]
- Ejigu, Y.G.; Teferle, F.N.; Klos, A.; Bogusz, J.; Hunegnaw, A. Tracking Hurricanes Using GPS Atmospheric Precipitable Water Vapor Field; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Ejigu, Y.G.; Teferle, F.N.; Klos, A.; Bogusz, J.; Hunegnaw, A. Monitoring and prediction of hurricane tracks using GPS tropospheric products. GPS Solut. 2021, 25, 76. [Google Scholar] [CrossRef]
- Järvinen, H.; Eresmaa, R.; Vedel, H.; Salonen, K.; Niemelä, S.; de Vries, J. A variational data assimilation system for ground-based GPS slant delays. Q. J. R. Meteorol. Soc. 2007, 133, 969–980. [Google Scholar] [CrossRef]
- Kawabata, T.; Shoji, Y.; Seko, H.; Saito, K. A Numerical Study on a Mesoscale Convective System over a Subtropical Island with 4D-Var Assimilation of GPS Slant Total Delays. J. Meteorol. Soc. Jpn. Ser. II 2013, 91, 705–721. [Google Scholar] [CrossRef] [Green Version]
- Ware, R.; Alber, C.; Rocken, C.; Solheim, F. Sensing integrated water vapor along GPS ray paths. Geophys. Res. Lett. 1997, 24, 417–420. [Google Scholar] [CrossRef] [Green Version]
- Masoumi, S.; McClusky, S.; Koulali, A.; Tregoning, P. A directional model of tropospheric horizontal gradients in Global Positioning System and its application for particular weather scenarios: Directional Tropospheric Gradients. J. Geophys. Res. Atmos. 2017, 122, 4401–4425. [Google Scholar] [CrossRef]
- Eresmaa, R.; Järvinen, H.; Niemelä, S.; Salonen, K. Asymmetricity of ground-based GPS slant delay data. Atmos. Chem. Phys. 2007, 7, 3143–3151. [Google Scholar] [CrossRef] [Green Version]
- Braun, J.; Rocken, C.; Ware, R. Validation of line-of-sight water vapor measurements with GPS. Radio Sci. 2001, 36, 459–472. [Google Scholar] [CrossRef] [Green Version]
- Braun, J.; Rocken, C.; Liljegren, J. Comparisons of Line-of-Sight Water Vapor Observations Using the Global Positioning System and a Pointing Microwave Radiometer. J. Atmos. Ocean. Technol. 2003, 20, 606–612. [Google Scholar] [CrossRef]
- Shoji, Y.N.N.; Iwabuchi, T.; Aonashi, K.; Seko, H.; Mishima, K.; Itagaki, A.; Ichikawa, R.; Ohtani, R. Tsukuba GPS Dense Net Campaign Observation: Improvement in GPS Analysis of Slant Path Delay by Stacking One-way Postfit Phase Residuals. J. Meteorol. Soc. Jpn. 2004, 82, 301–314. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zus, F.; Lu, C.; Ning, T.; Dick, G.; Ge, M.; Wickert, J.; Schuh, H. Retrieving high-resolution tropospheric gradients from multiconstellation GNSS observations. Geophys. Res. Lett. 2015, 42, 4173–4181. [Google Scholar] [CrossRef] [Green Version]
- Sidorov, D.; Teferle, F. Impact of Antenna Phase Centre Calibrations on Position Time Series. Preliminary Results; Springer: Berlin/Heidelberg, Germany, 2016; Volume 143, pp. 117–123. [Google Scholar]
- Fuhrmann, T.; Luo, X.; Knöpfler, A.; Mayer, M. Generating statistically robust multipath stacking maps using congruent cells. GPS Solut. 2015, 19, 83–92. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Nilsson, T.; Elgered, G. Long-term trends in the atmospheric water vapor content estimated from ground-based GPS data. J. Geophys. Res. 2008, 113, D19101. [Google Scholar] [CrossRef] [Green Version]
- Bertiger, W.; Bar-Sever, Y.; Dorsey, A.; Haines, B.; Harvey, N.; Hemberger, D.; Heflin, M.; Lu, W.; Miller, M.; Moore, A.W.; et al. GipsyX/RTGx, a new tool set for space geodetic operations and research. Adv. Space Res. 2020, 66, 469–489. [Google Scholar] [CrossRef]
- Miyazaki, S.; Iwabuchi, T.; Heki, K.; Naito, I. An impact of estimating tropospheric delay gradients on precise positioning in the summer using the Japanese nationwide GPS array. J. Geophys. Res. Solid Earth 2003, 108. [Google Scholar] [CrossRef]
- Gelb, A.; Analytic Sciences Corporation (Eds.) Applied Optimal Estimation, 14th ed.; MIT Press: Cambridge, MA, USA, 1996. [Google Scholar]
- Herring, T.A.; Davis, J.L.; Shapiro, I.I. Geodesy by radio interferometry: The application of Kalman Filtering to the analysis of very long baseline interferometry data. J. Geophys. Res. 1990, 95, 12561. [Google Scholar] [CrossRef]
- Hadas, T.; Teferle, F.N.; Kazmierski, K.; Hordyniec, P.; Bosy, J. Optimum stochastic modeling for GNSS tropospheric delay estimation in real-time. GPS Solut. 2017, 21, 1069–1081. [Google Scholar] [CrossRef] [Green Version]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. (Eds.) Bernese GNSS Software Version 5.2: User Manual; Astronomical Institute, University of Bern: Bern, Switzerland, 2015. [Google Scholar]
- de Oliveira, P.S.; Morel, L.; Fund, F.; Legros, R.; Monico, J.F.G.; Durand, S.; Durand, F. Modeling tropospheric wet delays with dense and sparse network configurations for PPP-RTK. GPS Solut. 2017, 21, 237–250. [Google Scholar] [CrossRef] [Green Version]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Bruyninx, C.; Legrand, J.; Fabian, A.; Pottiaux, E. GNSS metadata and data validation in the EUREF Permanent Network. GPS Solut. 2019, 23, 106. [Google Scholar] [CrossRef]
- Ganas, A.; Drakatos, G.; Rontogianni, S.; Tsimi, C.; Petrou, P.; Papanikolaou, M.; Argyrakis, P.; Boukouras, K.; Melis, N.; Stavrakakis, G. NOANET: The new permanent GPS network for Geodynamics in Greece. In Geophysical Research Abstracts; EGU: Munich, Germany, 2008; Volume 10. [Google Scholar]
- Chousianitis, K.; Papanikolaou, X.; Drakatos, G.; Tselentis, G.A. NOANET: A continuously operating GNSS network for solid-earth sciences in Greece. Seismol. Res. Lett. 2021, 92, 2050–2064. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Métivier, L.; Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. J. Geophys. Res. Solid Earth 2016, 121, 6109–6131. [Google Scholar] [CrossRef] [Green Version]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- International Earth Rotation and Reference Systems Service. IERS Conventions (2010); Number 36 in IERS Technical Note; Verl. des Bundesamts fur Kartographie und Geodasie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- Boehm, J.; Werl, B.; Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data: TROPOSPHERE MAPPING FUNCTIONS FROM ECMWF. J. Geophys. Res. Solid Earth 2006, 111. [Google Scholar] [CrossRef]
- Kedar, S.; Hajj, G.A.; Wilson, B.D.; Heflin, M.B. The effect of the second order GPS ionospheric correction on receiver positions. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef]
- Thébault, E.; Finlay, C.C.; Alken, P.; Beggan, C.D.; Canet, E.; Chulliat, A.; Langlais, B.; Lesur, V.; Lowes, F.J.; Manoj, C.; et al. Evaluation of candidate geomagnetic field models for IGRF-12. Earth Planets Space 2015, 67, 112. [Google Scholar] [CrossRef] [Green Version]
- Schmid, R.; Steigenberger, P.; Gendt, G.; Ge, M.; Rothacher, M. Generation of a consistent absolute phase-center correction model for GPS receiver and satellite antennas. J. Geod. 2007, 81, 781–798. [Google Scholar] [CrossRef]
- Christina Selle, S.D. Optimization of Tropospheric Delay Estimation Parameters by Comparison of GPS-Based Precipitable Water Vapor Estimates with Microwave Radiometer Measurements; IGS: Sydney, Australia, 2016. [Google Scholar]
- Bertiger, W.; Desai, S.D.; Haines, B.; Harvey, N.; Moore, A.W.; Owen, S.; Weiss, J.P. Single receiver phase ambiguity resolution with GPS data. J. Geod. 2010, 84, 327–337. [Google Scholar] [CrossRef]
- Herring, T.A.; Melbourne, T.I.; Murray, M.H.; Floyd, M.A.; Szeliga, W.M.; King, R.W.; Phillips, D.A.; Puskas, C.M.; Santillan, M.; Wang, L. Plate Boundary Observatory and related networks: GPS data analysis methods and geodetic products: PBO Data Analysis Methods and Products. Rev. Geophys. 2016, 54, 759–808. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.; Mervart, L.; Hugentobler, U. GS-MGEX: Preparing the ground for multi-constellation GNSS science. Inside GNSS 2014, 9, 42–49. [Google Scholar]
- Baltaci, H.; Akkoyunlu, B.O.; Tayanc, M. AN Extreme Hailstorm on 27 July 2017 in Istanbul, Turkey: Synoptic Scale Circulation and Thermodynamic Evaluation. Pure Appl. Geophys. 2018, 175, 3727–3740. [Google Scholar] [CrossRef]
- Toker, E.; Ezber, Y.; Sen, O.L. Numerical simulation and sensitivity study of a severe hailstorm over Istanbul. Atmos. Res. 2021, 250, 105373. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.A.; Anthes, R.A.; Rocken, C.; Ware, R.H. GPS Meteorology: Mapping Zenith Wet Delays onto Precipitable Water. J. Appl. Meteorol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Thayer, G.D. An improved equation for the radio refractive index of air. Radio Sci. 1974, 9, 803–807. [Google Scholar] [CrossRef]
- Eresmaa, R.; Järvinen, H. An observation operator for ground-based GPS slant delays. Tellus A Dyn. Meteorol. Oceanogr. 2006, 58, 131–140. [Google Scholar] [CrossRef] [Green Version]
- Boehm, J. Vienna mapping functions in VLBI analyses. Geophys. Res. Lett. 2004, 31, L01603. [Google Scholar] [CrossRef]
- Hobiger, T.; Ichikawa, R.; Takasu, T.; Koyama, Y.; Kondo, T. Ray-traced troposphere slant delays for precise point positioning. Earth Planets Space 2008, 60, e1–e4. [Google Scholar] [CrossRef] [Green Version]
- Hoffmann, L.; Günther, G.; Li, D.; Stein, O.; Wu, X.; Griessbach, S.; Heng, Y.; Konopka, P.; Müller, R.; Vogel, B.; et al. From ERA-Interim to ERA5: The considerable impact of ECMWF’s next-generation reanalysis on Lagrangian transport simulations. Atmos. Chem. Phys. 2019, 19, 3097–3124. [Google Scholar] [CrossRef]
- Li, W.; He, Y. A fast piecewise 3D ray tracing algorithm for determining slant total delays. J. Geod. 2022, 96, 7. [Google Scholar] [CrossRef]
- Zus, F.; Dick, G.; Douša, J.; Heise, S.; Wickert, J. The rapid and precise computation of GPS slant total delays and mapping factors utilizing a numerical weather model. Radio Sci. 2014, 49, 207–216. [Google Scholar] [CrossRef]
- Kačmařík, M.; Douša, J.; Dick, G.; Zus, F.; Brenot, H.; Möller, G.; Pottiaux, E.; Kapłon, J.; Hordyniec, P.; Václavovic, P.; et al. Inter-technique validation of tropospheric slant total delays. Atmos. Meas. Tech. 2017, 10, 2183–2208. [Google Scholar] [CrossRef] [Green Version]
- Wilgan, K.; Dick, G.; Zus, F.; Wickert, J. Towards operational multi-GNSS tropospheric products at GFZ Potsdam. Atmos. Meas. Tech. 2022, 15, 21–39. [Google Scholar] [CrossRef]
- Hurter, F.P. GNSS Meteorology in Spatially Dense Networks; Number Einundneunzigster Band in Geodatisch-Geophysikalische Arbeiten in der Schweiz; Schweizerische Geodtische Kommission: Zurich, Switzerland, 2014; OCLC: ocn909618289. [Google Scholar]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Araszkiewicz, A.; Völksen, C. The impact of the antenna phase center models on the coordinates in the EUREF Permanent Network. GPS Solut. 2017, 21, 747–757. [Google Scholar] [CrossRef]
- Ejigu, Y.G.; Hunegnaw, A.; Abraha, K.E.; Teferle, F.N. Impact of GPS antenna phase center models on zenith wet delay and tropospheric gradients. GPS Solut. 2019, 23, 5. [Google Scholar] [CrossRef]
- Hunegnaw, A.; Teferle, F.N. Evaluation of the Multipath Environment Using Electromagnetic-Absorbing Materials at Continuous GNSS Stations. Sensors 2022, 22, 3384. [Google Scholar] [CrossRef]
- Alber, C.; Ware, R.; Rocken, C.; Braun, J. Obtaining single path phase delays from GPS double differences. Geophys. Res. Lett. 2000, 27, 2661–2664. [Google Scholar] [CrossRef] [Green Version]
- Iwabuchi, T.; Sihimada, S.; Nakamura, H. Tsukuba GPS densenet campaign observations: Comparison of the stacking maps of post-fit phase residuals estimated from three software packages. J. Meteorol. Soc. Jpn. 2004, 82, 315–330. [Google Scholar] [CrossRef]
- Moore, M.; Watson, C.; King, M.; McClusky, S.; Tregoning, P. Empirical modelling of site-specific errors in continuous GPS data. J. Geod. 2014, 88, 887–900. [Google Scholar] [CrossRef]
- Bilich, A.; Larson, K.M. Mapping the GPS multipath environment using the signal-to-noise ratio (SNR. ) Radio Sci. 2007, 42, 6. [Google Scholar] [CrossRef]
- Bender, M.; Dick, G.; Wickert, J.; Schmidt, T.; Song, S.; Gendt, G.; Ge, M.; Rothacher, M. Validation of GPS slant delays using water vapour radiometers and weather models. Meteorol. Z. 2008, 17, 807–812. [Google Scholar] [CrossRef] [Green Version]
- Hanssen, R.F.; Weckwerth, T.M.; Zebker, H.A.; Klees, R. High-Resolution Water Vapor Mapping from Interferometric Radar Measurements. Science 1999, 283, 1297–1299. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eresmaa, R.; Healy, S.; Järvinen, H.; Salonen, K. Implementation of a ray-tracing operator for ground-based GPS Slant Delay observation modeling. J. Geophys. Res. 2008, 113, D11114. [Google Scholar] [CrossRef] [Green Version]
- Wilgan, K.; Siddique, M.; Strozzi, T.; Geiger, A.; Frey, O. Comparison of Tropospheric Path Delay Estimates from GNSS and Space-Borne SAR Interferometry in Alpine Conditions. Remote Sens. 2019, 11, 1789. [Google Scholar] [CrossRef] [Green Version]
- Bar-Sever, Y.E.; Kroger, P.M.; Borjesson, J.A. Estimating horizontal gradients of tropospheric path delay with a single GPS receiver. J. Geophys. Res. Solid Earth 1998, 103, 5019–5035. [Google Scholar] [CrossRef] [Green Version]
- Davis, J.L.; Elgered, G.; Niell, A.E.; Kuehn, C.E. Ground-based measurement of gradients in the “wet” radio refractivity of air. Radio Sci. 1993, 28, 1003–1018. [Google Scholar] [CrossRef]
- Elósegui, P.; Ruis, A.; Davis, J.; Ruffini, G.; Keihm, S.; Bürki, B.; Kruse, L. An experiment for estimation of the spatial and temporal variations of water vapor using GPS data. Phys. Chem. Earth 1998, 23, 125–130. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS–Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer: Wien, Austria; New York, NY, USA, 2008. [Google Scholar]
- Van Der Marel, H.; Gündlich, B. Slant Delay Retrieval and Multipath Mapping Software Report for WP6100—TOUGH; Technical Report Deliverable D33; Department of Earth Observation and Space Systems (DEOS): Delft, The Netherlands, 2006. [Google Scholar]
- Trzcina, E.; Hanna, N.; Kryza, M.; Rohm, W. TOMOREF Operator for Assimilation of GNSS Tomography Wet Refractivity Fields in WRF DA System. J. Geophys. Res. Atmos. 2020, 125, e2020JD032451. [Google Scholar] [CrossRef]
- de Haan, S.; van der Marel, H.; Barlag, S. Comparison of GPS slant delay measurements to a numerical model: Case study of a cold front passage. Phys. Chem. Earth Parts A/B/C 2002, 27, 317–322. [Google Scholar] [CrossRef]
- MacMillan, D.S. Atmospheric gradients from very long baseline interferometry observations. Geophys. Res. Lett. 1995, 22, 1041–1044. [Google Scholar] [CrossRef]
- Chen, G.; Herring, T.A. Effects of atmospheric azimuthal asymmetry on the analysis of space geodetic data. J. Geophys. Res. Solid Earth 1997, 102, 20489–20502. [Google Scholar] [CrossRef]
- Mekik, C.; Deniz, I. Modelling and validation of the weighted mean temperature for Turkey: Modelling and validation of T m for Turkey. Meteorol. Appl. 2017, 24, 92–100. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. 1992, 97, 15787. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D.; Hsu, K.L.; Joyce, R.J.; Kidd, C.; Nelkin, E.J.; Sorooshian, S.; Stocker, E.F.; Tan, J.; et al. Integrated Multi-satellite Retrievals for the Global Precipitation Measurement (GPM) Mission (IMERG). In Satellite Precipitation Measurement; Levizzani, V., Kidd, C., Kirschbaum, D.B., Kummerow, C.D., Nakamura, K., Turk, F.J., Eds.; Springer International Publishing: Cham, Switzerland, 2020; Volume 1, pp. 343–353. [Google Scholar] [CrossRef]
- Askne, J.; Nordius, H. Estimation of tropospheric delay for microwaves from surface weather data. Radio Sci. 1987, 22, 379–386. [Google Scholar] [CrossRef]
- Nahmani, S.; Bock, O.; Guichard, F. Sensitivity of GPS tropospheric estimates to mesoscale convective systems in West Africa. Atmos. Chem. Phys. 2019, 19, 9541–9561. [Google Scholar] [CrossRef]
- Offiler, D.; Jones, J.; Bennit, G.; Vedel, H. IG EUMETNET GNSS Water Vapour Programme (E-GVAP-II); Technical Report; MetOffice: Exeter, UK, 2010. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Parameter | Comments |
|---|---|---|
| Strategy | Station processed in the precise point positioning (PPP) mode; using undifferenced phase observations | Standard JPL setting |
| Orbits and clocks | JPL final orbits and clocks | Standard JPL setting |
| GPS raw data | RINEX v2 format 30 s sampling interval | Data from Turkish holding |
| Mapping Function | Vienna Mapping Function (VMF1) | Selected in JPL |
| Phase elevation weighting; elevation depending inverse weights ( =) | Selected in data processing | |
| Cut-off elevation angle | ( for the CORS-TR stations) | Selected in data processing |
| A priori zenith delay | From VMF1 model | Selected in data processing |
| Mapping function used for zenith delay adjustment | VMF1 wet mapping function; ZWD is constrained at each epoch as a random walk process noise uncertainties of 5.4 mm/sqrt (hr) | Selected in data processing |
| Estimate of east–west and north–south gradients | Gradients are constrained at each epoch as a random walk process noise uncertainties of 0.54 mm/sqrt (hr) | Selected in data processing |
| Sampling rate of the ZTD estimates | 30 s | Selected in data processing |
| Ocean tide model | FES2004 | suggested by JPL |
| DOY | 201 | 202 | 203 | 204 | 205 | 206 | 207 | 208 | 209 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Name | ||||||||||
| AYVL | 8.47 | 8.47 | 8.48 | 8.51 | 8.30 | 8.32 | 8.33 | 8.58 | 8.58 | |
| 0.65 | 0.66 | 0.66 | 0.67 | 0.65 | 0.66 | 0.65 | 0.66 | 0.67 | ||
| BAN1 | 8.81 | 8.94 | 9.00 | 9.02 | 8.90 | 8.90 | 8.87 | 9.10 | 9.10 | |
| 0.72 | 0.73 | 0.74 | 0.74 | 0.74 | 0.74 | 0.74 | 0.74 | 0.74 | ||
| COST | 8.83 | 8.78 | 8.85 | 8.93 | 8.91 | 9.04 | 9.13 | 9.35 | 9.45 | |
| 0.69 | 0.69 | 0.70 | 0.71 | 0.73 | 0.73 | 0.74 | 0.76 | 0.76 | ||
| HEND | 13.58 | 13.57 | 13.60 | 13.59 | 13.45 | 13.37 | 13.37 | 13.46 | 13.45 | |
| 1.03 | 1.03 | 1.06 | 1.02 | 1.01 | 1.02 | 1.00 | 1.00 | 1.00 | ||
| ISTN | 9.59 | 9.56 | 9.80 | 9.86 | 10.05 | 10.05 | 10.02 | 10.23 | 10.23 | |
| 0.78 | 0.78 | 0.76 | 0.75 | 0.76 | 0.76 | 0.76 | 0.77 | 0.76 | ||
| IZMT | 11.26 | 11.22 | 11.16 | 10.44 | 10.46 | 10.18 | 10.22 | 10.34 | 10.23 | |
| 0.74 | 0.75 | 0.75 | 0.74 | 0.72 | 0.72 | 0.72 | 0.75 | 0.75 | ||
| KARB | 9.91 | 9.92 | 9.94 | 9.96 | 9.86 | 9.88 | 9.91 | 10.04 | 10.06 | |
| 0.77 | 0.78 | 0.78 | 0.77 | 0.78 | 0.78 | 0.79 | 0.82 | 0.82 | ||
| KIRL | 10.59 | 10.53 | 10.54 | 10.38 | 10.11 | 10.14 | 10.24 | 10.29 | 10.28 | |
| 0.76 | 0.76 | 0.77 | 0.76 | 0.75 | 0.75 | 0.78 | 0.78 | 0.77 | ||
| SLEE | 9.36 | 9.34 | 9.32 | 9.33 | 9.28 | 8.90 | 8.88 | 9.19 | 9.17 | |
| 0.66 | 0.66 | 0.66 | 0.66 | 0.64 | 0.63 | 0.64 | 0.67 | 0.66 | ||
| TEKR | 9.70 | 9.67 | 9.68 | 9.61 | 9.47 | 9.55 | 9.56 | 9.66 | 9.71 | |
| 0.78 | 0.78 | 0.78 | 0.77 | 0.76 | 0.77 | 0.77 | 0.77 | 0.77 | ||
| ZONG | 9.98 | 9.93 | 9.87 | 9.88 | 9.74 | 9.41 | 9.42 | 9.56 | 9.64 | |
| 0.78 | 0.78 | 0.76 | 0.77 | 0.75 | 0.72 | 0.73 | 0.77 | 0.76 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hunegnaw, A.; Duman, H.; Ejigu, Y.G.; Baltaci, H.; Douša, J.; Teferle, F.N. On the Impact of GPS Multipath Correction Maps and Post-Fit Residuals on Slant Wet Delays for Tracking Severe Weather Events. Atmosphere 2023, 14, 219. https://doi.org/10.3390/atmos14020219
Hunegnaw A, Duman H, Ejigu YG, Baltaci H, Douša J, Teferle FN. On the Impact of GPS Multipath Correction Maps and Post-Fit Residuals on Slant Wet Delays for Tracking Severe Weather Events. Atmosphere. 2023; 14(2):219. https://doi.org/10.3390/atmos14020219
Chicago/Turabian StyleHunegnaw, Addisu, Hüseyin Duman, Yohannes Getachew Ejigu, Hakki Baltaci, Jan Douša, and Felix Norman Teferle. 2023. "On the Impact of GPS Multipath Correction Maps and Post-Fit Residuals on Slant Wet Delays for Tracking Severe Weather Events" Atmosphere 14, no. 2: 219. https://doi.org/10.3390/atmos14020219