
Regional/Single Station Zenith Tropospheric Delay Combination Prediction Model Based on Radial Basis Function Neural Network and Improved Long Short-Term Memory
 and
and
Abstract
:1. Introduction
1.1. Motivations
1.2. Contributions
1.3. Organization
2. Materials and Methods
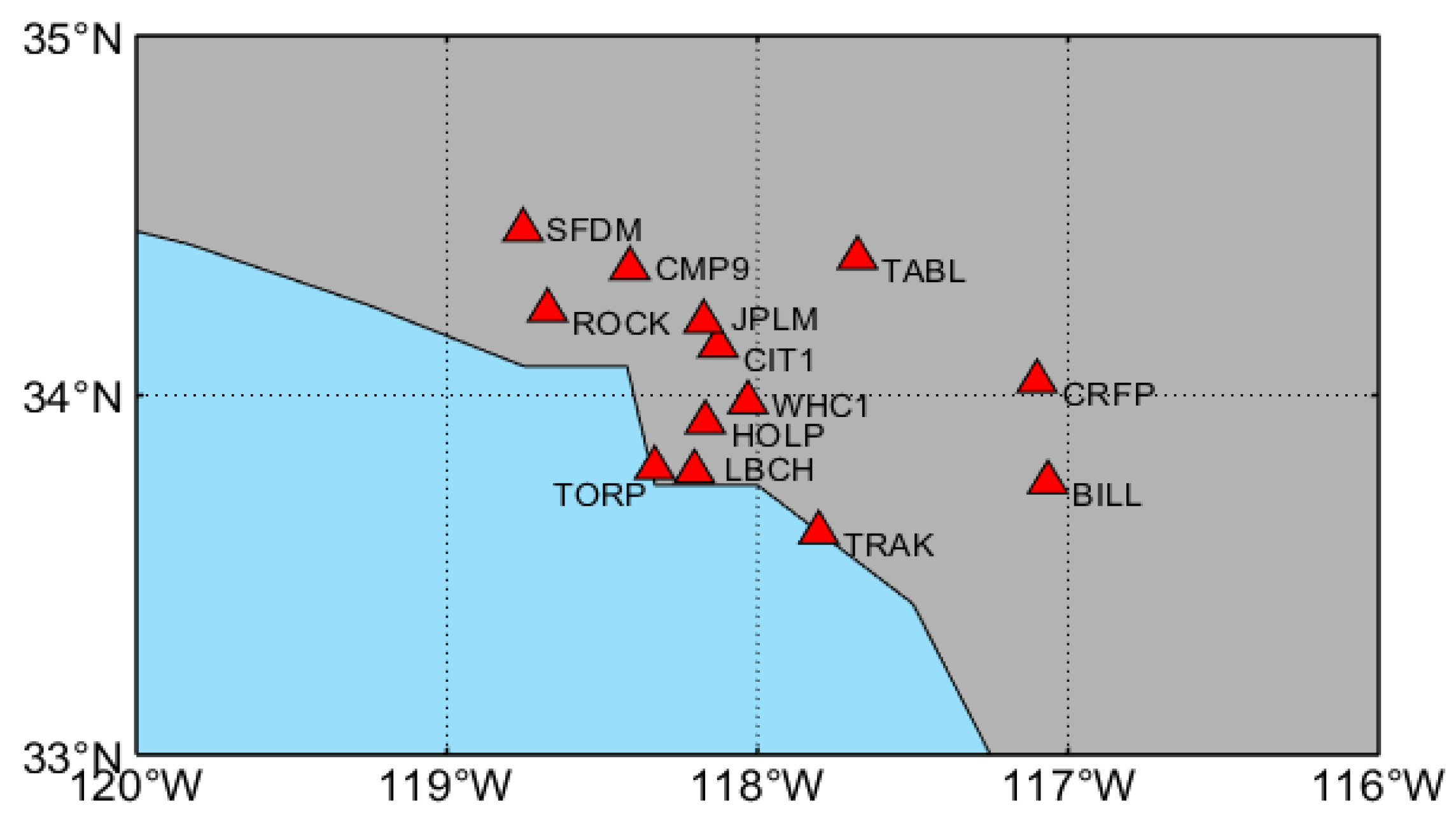
2.1. Study Region and Datasets
2.2. Methods
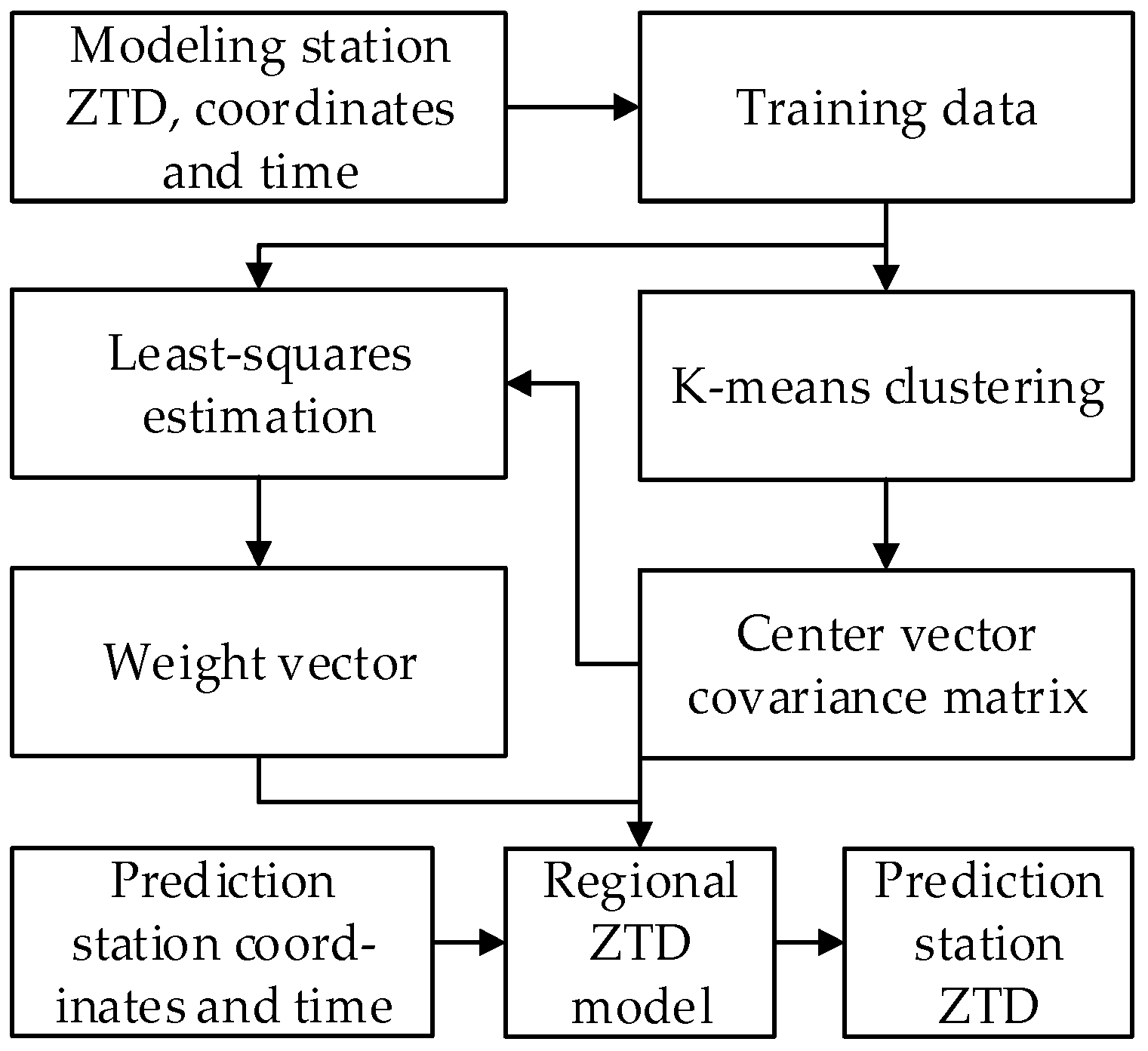
2.2.1. K-Means Clustering-Assisted RBF Neural Network Region ZTD Modeling
- (1)
- Randomly select k objects, which indicate the initial centers of the k clusters to be divided. The number of k can be preferred by the k-fold cross-check or bootstrap method. In this paper, the value of k is selected as 1.
- (2)
- Calculate the distance between each point and the center point and find the center with the shortest distance as the new center point of each cluster.
- (3)
- Calculate the average value (centroid) of all objects in each cluster as the new center point of each cluster.
- (4)
- Calculate the distance between all objects and the new k centers again and redistribute all objects to each cluster according to the nearest distance principle.
- (5)
- Repeat the above steps until all cluster centers remain unchanged (the distance between the newly generated cluster and the previous cluster is less than a set threshold). This is the end of clustering.
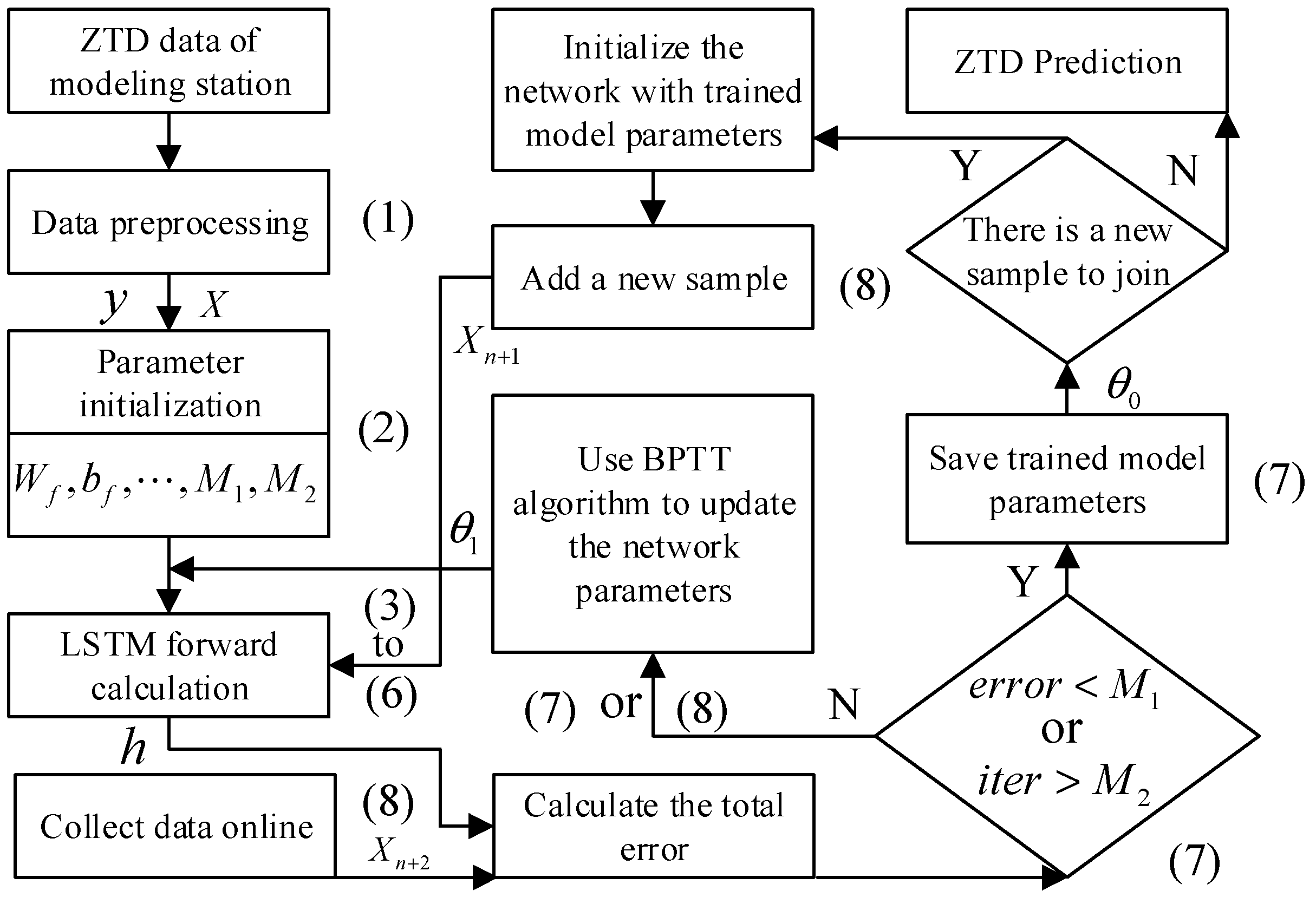
2.2.2. Real-Time Parameters Updating LSTM Single-Station ZTD Modeling
- (1)
- The actual time series is extended to , where n is the time series length, k is the sample dimension, n – k + 1 is the number of samples, and is the training data label. X is normalized:
- (2)
- Initialize network parameters and set super parameters:where and represent the initial weight and bias of the forgetting gate, respectively. The symbol rand ( ) represents a random function; and L and N represent the number of LSTM cell units and the number of neuron layers, respectively. Similarly, the initial weights and biases of the input gate, the output gate, the cell state, , , , , , , and other parameters also need to be initialized. Error_Cost and Max _ iter represent the error threshold and the maximum number of hyperparameter iterations, respectively.
- (3)
- Calculate what information needs to be forgotten from the cell state at time t – 1.where is the output of the forget gate. The symbol ( ) represents a sigmoid activation function. is the output value of the LSTM at the previous moment. is the input value of the network at the current moment. is the cell state at the previous moment. The symbol represents the point multiplication operation of the two vectors.
- (4)
- Calculate which input information can be left in the cell state at time t.where is the output of the input gate and determines what values will be updated. The symbol tanh ( ) represents a hyperbolic tangent activation function. is a vector of new candidate values created by the tanh function.
- (5)
- Calculate the cell state at time t.where is the result of the combined actions of the forget gate and the input gate on the cell states in Equations (9) and (10).
- (6)
- Calculate the network output at time t.where is the output of the output gate. is the predicted value at the current moment. Repeat Steps 3 to 6 to calculate the predicted values of all training samples.
- (7)
- Calculate the errors between the predicted values and the true values of all samples.where ( ) represents the cost function. The minimum value of the function in Equation (13), namely, the optimal solution error<Error_Cost, or the current number of iterations iter > Max_iter, are considered. Thus, the training ends. Otherwise, the BPTT algorithm is used to update the network parameters, and one is added to the number of iterations, and then the processing returns to Step 3 for circulation. It exits the loop until the error threshold or maximum number of iterations is reached. The following trained network parameters are saved:
- (8)
- Update parameters in real time according to online observation data. The new samples, and , perform the forward operation of the LSTM shown in Steps 3–6 to obtain the predicted value . When the data are collected, they can be used as the true value label of the predicted value to calculate the overall error:Then, the BPTT algorithm is used to update the model parameters to :where is the learning rate; and and are the gradient matrices and vectors of the weights and biases of each layer of neurons, respectively. The parameter initialization corresponds to the global optimal solution of the historical sample. Hence, when the new sample is added, the global optimal solution can be achieved again with only a few simple steps of updating.
2.2.3. Regional/Single Station ZTD Combination Model
2.2.4. Accuracy Evaluation Criteria
3. Results
3.1. Regional Modeling Results
3.2. Single Station Modeling Results
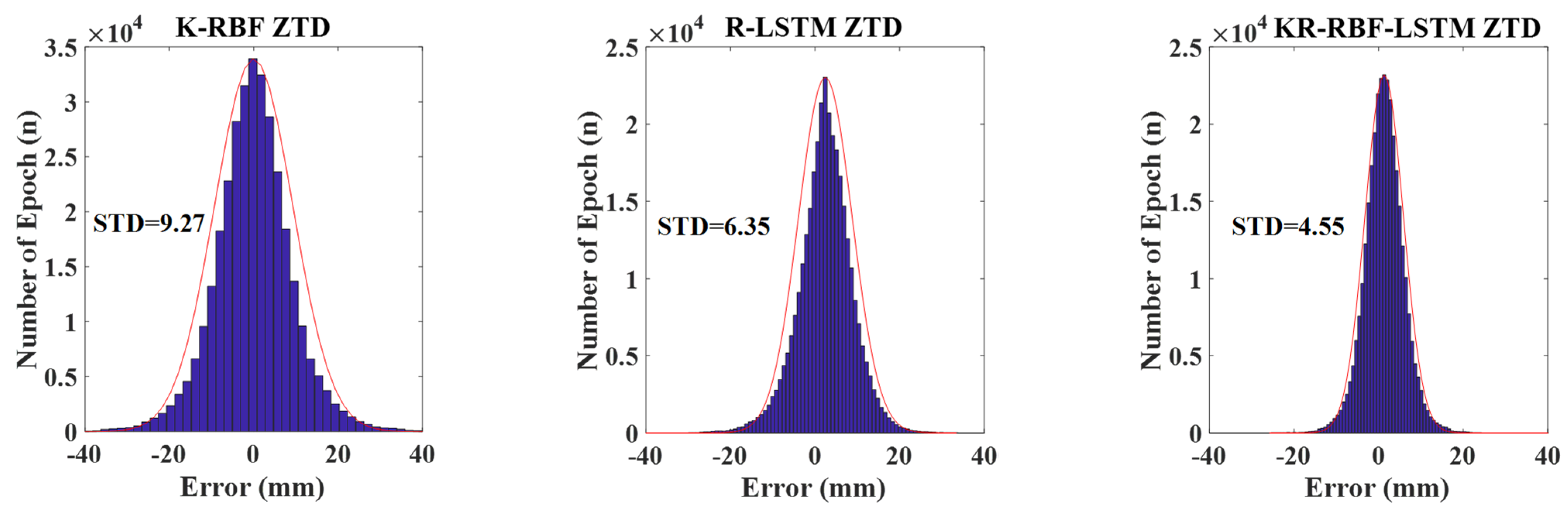
3.3. Regional/Single Station Combination Modeling Results
4. Discussion
4.1. Regional Modeling
4.2. Single Station Modeling
4.3. Regional/Single Station Combination Modeling
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GNSS | Global navigation satellite system |
| GPS | Global positioning system |
| ZTD | Zenith tropospheric delay |
| ZHD | Zenith hydrostatic delay |
| ZWD | Zenith wet delay |
| BP | Back propagation |
| LSTM | Long short-term memory |
| LSTM E/D | Long short-term memory encoder decoder |
| RBF | Radial basis function |
| K-RBF | RBF neural network assisted by the K-means cluster algorithm |
| R-LSTM | LSTM of real-time parameter updating |
| KR-RBF-LSTM | K-RBF and R-LSTM |
| RMSE | Root-mean-square error |
| STD | Standard deviation |
| MAE | Mean absolute error |
| MAPE | Mean absolute percentage error |
| R2 | Coefficient of determination |
| TTC | Training time consumption |
| PWV | Precipitable water vapor |
| NWP | Numerical weather prediction |
| ML | Machine learning |
| ANFIS | Adaptive network-based fuzzy inference system |
| ANN | Artificial neural network |
| LSSVM | Least-squares support vector machine |
| PCA | Principal component analysis |
| ICA | Independent component analysis |
| GGOS | Global geodetic observing system |
| CNN | Convolutional neural network |
| KNN | K-nearest neighbor |
| GP | Gaussian processes |
| ERA5 | Fifth-generation European Center for Medium-range Weather Forecast reanalysis |
| PPP | Precision point positioning |
| RT-PPP | Real-time precision point positioning |
| RTK | Real-time kinematic positioning |
| CORS | Continuously-operating reference station |
| PPP-RTK | Integer ambiguity resolution-enabled precise point positioning |
| IGS | International GNSS Service |
| DOY | Day of the year |
References
- Van Baelen, J.; Aubagnac, J.P.; Dabas, A. Comparison of near-real time estimates of integrated water vapor derived with GPS, radiosondes, and microwave radiometer. J. Atmos. Ocean. Technol. 2005, 22, 201–210. [Google Scholar] [CrossRef]
- Brenot, H.; Neméghaire, J.; Delobbe, L.; Clerbaux, N.; Meutter, P.D.; Deckmyn, A.; Delcloo, A.; Frappez, L.; Roozendael, M.V. Preliminary signs of the initiation of deep convection by GNSS. Atmos. Chem. Phys. 2013, 13, 5425–5449. [Google Scholar] [CrossRef]
- Tunali, E. Water vapor monitoring with IGS RTS and GPT3/VMF3 functions over Turkey. Adv. Space Res. 2022, 69, 2376–2390. [Google Scholar] [CrossRef]
- Troller, M.; Geiger, A.; Brockmann, E.; Bettems, J.M.; Bürkia, B.; Kahle, H.-G. Tomographic determination of the spatial distribution of water vapor using GPS observations. Adv. Space Res. 2006, 37, 2211–2217. [Google Scholar] [CrossRef]
- Zangvil, A.; Portis, D.H.; Lamb, P.J. Investigation of the large-scale atmospheric moisture field over the midwestern United States in relation to summer precipitation. Part II: Recycling of local evapotranspiration and association with soil moisture and crop yields. J. Clim. 2004, 17, 3283–3301. [Google Scholar] [CrossRef]
- Park, H.J.; Shin, D.B.; Yoo, J.M. Atmospheric water balance over oceanic regions as estimated from satellite, merged, and reanalysis data. J. Geophys. Res.-Atmos. 2013, 118, 3495–3505. [Google Scholar] [CrossRef]
- National Research Council. New Research Opportunities in the Earth Sciences; National Academy Press: Washington, DC, USA, 2012; Available online: http://www.nap.edu/openbook.php?record_id=13236 (accessed on 31 October 2014).
- Suni, T.; Guenther, A.; Hansson, H.C.; Kulmala, M.; Andreae, M.O.; Arneth, A.; Artaxo, P.; Blyth, E.; Brus, M.; Ganzeveld, L.; et al. The significance of land-atmosphere interactions in the Earth system—iLEAPS achievements and perspectives. Anthropocene 2015, 12, 69–84. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the Global Positioning System. J. Geophys. Res.-Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Guerova, G.; Jones, J.; Douša, J.; Dick, G.; Haan, S.D.; Pottiaux, E.; Bock, O.; Pacione, R.; Elgered, G.; Vedel, H.; et al. Review of the state of the art and future prospects of the ground-based GNSS meteorology in Europe. Atmos. Meas. Tech. 2016, 9, 5385–5406. [Google Scholar] [CrossRef]
- Zhang, K.; Manning, T.; Wu, S.; Rohm, W.; Silcock, D.; Choy, S. Capturing the Signature of Severe Weather Events in Australia Using GPS Measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1839–1847. [Google Scholar] [CrossRef]
- Liu, J.; Chang, Z.; Zheng, H. Analysis on the performances of the GNSS tropospheric delay correction models. E3S Web Conf. 2022, 360, 01043. [Google Scholar] [CrossRef]
- Li, W.; Yuan, Y.; Ou, J.; He, Y. IGGtrop_SH and IGGtrop_rH: Two Improved Empirical Tropospheric Delay Models Based on Vertical Reduction Functions. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5276–5288. [Google Scholar] [CrossRef]
- Ghaderpour, E.; Pagiatakis, S.D.; Hassan, Q.K. A Survey on Change Detection and Time Series Analysis with Applications. Appl. Sci. 2021, 11, 6141. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, T.; Xu, G.; Lu, Z. Apparent Short-Period GNSS-ZTD Disturbance Correlated with Precipitation Events. IEEE Geosci. Remote Sens. 2022, 19, 1006305. [Google Scholar] [CrossRef]
- Ghaderpour, E. Least-squares Wavelet and Cross-wavelet Analyses of VLBI Baseline Length and Temperature Time Series: Fortaleza–Hartebeesthoek–Westford–Wettzell. Publ. Astron. Soc. Pac. 2021, 133, 014502. [Google Scholar] [CrossRef]
- Shamshiri, R.; Motagh, M.; Nahavandchi, H.; Haghighi, M.H.; Hoseini, M. Improving tropospheric corrections on large-scale Sentinel-1 interferograms using a machine learning approach for integration with GNSS-derived zenith total delay (ZTD). Remote Sens. Environ 2020, 239, 111608. [Google Scholar] [CrossRef]
- Wilgan, K.; Geiger, A. High-resolution models of tropospheric delays and refractivity based on GNSS and numerical weather prediction data for alpine regions in Switzerland. J. Geodesy 2019, 93, 819–835. [Google Scholar] [CrossRef]
- Chen, J.; Wang, J.; Wang, J.; Tan, W.; Observation, S.A. SHAtrop: Empirical ZTD Model Based on CMONOC GNSS Network. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 1588–1595. [Google Scholar]
- Zhao, Q.; Su, J.; Xu, C.; Yao, Y.; Zhang, X.; Wu, J. High-precision ZTD model of altitude-related correction. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 609–621. [Google Scholar] [CrossRef]
- Chkeir, S.; Anesiadou, A.; Mascitelli, A.; Biondi, R. Nowcasting extreme rain and extreme wind speed with machine learning techniques applied to different input datasets. Atmos. Res. 2023, 282, 106548. [Google Scholar] [CrossRef]
- Zhang, H.; Yao, Y.; Hu, M.; Xu, C.; Su, X.; Che, D.; Peng, W. A Tropospheric Zenith Delay Forecasting Model Based on a Long Short-Term Memory Neural Network and Its Impact on Precise Point Positioning. Remote Sens. 2022, 14, 5921. [Google Scholar] [CrossRef]
- Xiao, X.; Lv, W.; Han, Y.; Lu, F.; Liu, J. Prediction of CORS Water Vapor Values Based on the CEEMDAN and ARIMA-LSTM Combination Model. Atmosphere 2022, 13, 1453. [Google Scholar] [CrossRef]
- Xu, T.; Li, S.; Wang, S.; Jiang, N. Improved tropospheric delay model for China using RBF neural network and meteorological data. Acta Geod. Cartogr. Sin. 2022, 51, 1690–1707. [Google Scholar]
- Wang, Y.; Zhang, L.; Yang, J. Study on prediction of zenith tropospheric delay by use of BP neural network. J. Geod. Geodyn. 2011, 31, 134–137. [Google Scholar]
- Xiao, G.; Ou, J.; Liu, G.; Zhang, H. Construction of a regional precise tropospheric delay model based on improved BP neural network. Chin. J. Geophys. 2018, 61, 3139–3148. (In Chinese) [Google Scholar]
- Li, S. GNSS Tropospheric Delay Modeling and Prediction Based on Machine Learning; Chang’an University: Xi’an, China, 2021. [Google Scholar]
- Shi, Y.; Wu, F.; Zhu, H.; Han, X. Prediction of tropospheric delay based on the LSTM model of Keras platform. GNSS World China 2020, 45, 115–122. [Google Scholar]
- Zhang, Q.; Li, F.; Zhang, S.; Li, W. Modeling and Forecasting the GPS Zenith Troposphere Delay in West Antarctica Based on Different Blind Source Separation Methods and Deep Learning. Sensors 2020, 20, 2343. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Xu, T.; Xu, Y.; Jiang, N.; Bastos, L. Forecasting GNSS Zenith Troposphere Delay by Improving GPT3 Model with Machine Learning in Antarctica. Atmosphere 2022, 13, 78. [Google Scholar] [CrossRef]
- Zhang, H.; Yao, Y.; Xu, C.; Xu, W.; Shi, J. Transformer-Based Global Zenith Tropospheric Delay Forecasting Model. Remote Sens. 2022, 14, 3335. [Google Scholar] [CrossRef]
- Zheng, Y.; Lu, C.; Wu, Z.; Liao, J.; Zhang, Y.; Wang, Q. Machine learning-based model for real-time GNSS precipitable water vapor sensing. Geophys. Res. Lett. 2022, 49, e2021GL096408. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Z.; Wong, K.; Woo, W.C. Detecting Water Vapor Variability during Heavy Precipitation Events in Hong Kong Using the GPS Tomographic Technique. J. Atmos. Ocean. Technol. 2017, 34, 1001–1019. [Google Scholar] [CrossRef]
- Chen, S.; Cowan, C.F.N.; Grant, P.M. Orthogonal least squares learning algorithm for radial basis function networks. IEEE Trans. Neural Netw. 1991, 2, 302–309. [Google Scholar] [CrossRef] [PubMed]
- Moody, J.; Darken, C. Fast Learning in Networks of Locally-Tuned Processing Units. Neural Comput. 1989, 1, 281–294. [Google Scholar] [CrossRef]
- Aharon, M.; Elad, M.; Bruckstein, A. K-SVD: An Algorithm for Designing Overcomplete Dictionaries for Sparse Representation. IEEE Trans. Signal Process. 2006, 54, 4310–4323. [Google Scholar] [CrossRef]
- Jain, A.K. Data clustering: 50 years beyond K-means. Pattern Recognit. Lett. 2010, 31, 651–666. [Google Scholar] [CrossRef]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A Review of Recurrent Neural Networks: LSTM Cells and Network Architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef]
- Li, L.; Kuang, C.; Zhu, J.; Chen, W.; Chen, Y.; Long, S.; Li, H. Rainstorm nowcasting based on GPS real-time precise point positioning technology. Chin. J. Geophys. 2012, 55, 1129–1136. [Google Scholar]
- Wang, S.; Li, B.; Gao, Y.; Gao, Y.; Guo, H. A comprehensive assessment of interpolation methods for regional augmented PPP using reference networks with different scales and terrains. Measurement 2020, 150, 107067. [Google Scholar] [CrossRef]
- Li, S.; Xu, T.; Jiang, N. Tropospheric Delay Modeling Based on Multi-source Data Fusion and Machine Learning Algorithms. In Proceedings of the China Satellite Navigation Conference (CSNC 2021), Nanchang, China, 26–28 May 2021; Lecture Notes in Electrical Engineering. Springer: Berlin/Heidelberg, Germany, 2021; Volume 772, pp. 145–158. [Google Scholar]
- Qiao, X.; Chang, W.; Zhou, S.; Lu, X. A prediction model of hard landing based on RBF neural network with K-means clustering algorithm. In Proceedings of the 2016 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Bali, Indonesia, 4−7 December 2016; pp. 462–465. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Number | RMSE/mm | Increasing Rate/% | MAE/mm | Increasing Rate/% | R2 | Increasing Rate/% | TTC/s | Increasing Rate/% |
|---|---|---|---|---|---|---|---|---|
| K-RBF/R-LSTM/KR-RBF-LSTM | Imp1/Imp2 | K-RBF/R-LSTM/KR-RBF-LSTM | Imp1/Imp2 | K-RBF/R-LSTM/KR-RBF-LSTM | Imp1/Imp2 | K-RBF/R-LSTM/KR-RBF-LSTM | Imp1/Imp2 | |
| 1 | 10.85/6.74/5.25 | 51.63/22.09 | 9.11/5.92/4.38 | 51.94/26.10 | 0.46/0.98/0.90 | 49.05/−8.18 | 5.31/0.18/5.49 | −3.30/−96.70 |
| 2 | 6.16/6.18/3.95 | 35.86/36.10 | 5.01/5.31/3.36 | 33.07/36.75 | 0.76/0.97/0.96 | 20.97/−1.80 | 5.26/0.18/5.44 | −3.31/−96.69 |
| 3 | 8.07/5.74/4.29 | 46.83/25.28 | 6.46/4.98/3.49 | 45.95/29.85 | 0.61/0.98/0.92 | 33.72/−6.23 | 4.87/0.19/5.06 | −3.70/−96.30 |
| 4 | 12.01/6.83/5.26 | 56.22/22.93 | 10.04/5.88/4.40 | 56.16/25.09 | 0.42/0.98/0.92 | 54.66/−6.00 | 4.46/0.18/4.63 | −3.84/−96.16 |
| 5 | 7.01/5.96/3.74 | 46.72/37.35 | 5.77/5.09/3.13 | 45.80/38.59 | 0.75/0.98/0.96 | 22.02/−2.24 | 5.17/0.21/5.38 | −3.88/−96.12 |
| 6 | 7.73/6.28/4.62 | 40.28/26.52 | 6.39/5.50/3.79 | 40.59/31.05 | 0.60/0.97/0.89 | 32.81/−8.05 | 4.56/0.18/4.74 | −3.77/−96.23 |
| 7 | 7.50/5.73/3.85 | 48.65/32.82 | 6.25/4.92/3.23 | 48.28/34.33 | 0.68/0.98/0.95 | 27.86/−3.27 | 4.27/0.18/4.45 | −4.05/−95.95 |
| 8 | 8.48/5.85/4.23 | 50.04/27.63 | 6.98/5.05/3.52 | 49.53/30.26 | 0.61/0.98/0.93 | 34.27/−5.03 | 4.99/0.18/5.18 | −3.54/−96.46 |
| 9 | 11.15/6.11/4.62 | 58.56/24.37 | 9.27/5.22/3.86 | 58.36/26.05 | 0.50/0.98/0.93 | 46.79/−4.64 | 5.20/0.18/5.38 | −3.30/−96.70 |
| 10 | 9.55/6.23/5.15 | 46.03/17.22 | 7.90/5.56/4.19 | 46.98/24.69 | 0.48/0.97/0.86 | 44.23/−11.73 | 4.69/0.18/4.87 | −3.68/−96.32 |
| 11 | 6.08/5.89/3.77 | 38.02/35.98 | 4.89/5.13/3.16 | 35.51/38.48 | 0.75/0.98/0.94 | 20.18/−3.37 | 4.20/0.19/4.38 | −4.28/−95.72 |
| 12 | 8.31/5.70/4.23 | 49.07/25.73 | 6.92/4.93/3.55 | 48.64/27.86 | 0.60/0.98/0.90 | 33.53/−7.74 | 4.58/0.19/4.76 | −3.92/−96.08 |
| 13 | 5.66/6.15/3.81 | 32.57/37.98 | 4.55/5.32/3.22 | 29.19/39.51 | 0.78/0.97/0.95 | 18.46/−2.40 | 4.58/0.19/4.77 | −3.90/−96.10 |
| mean | 8.35/6.11/4.37 | 47.70/28.48 | 6.89/5.29/3.64 | 47.20/31.29 | 0.61/0.98/0.92 | 33.51/−5.43 | 4.78/0.18/4.96 | −3.71/−96.29 |
| min | 5.66/5.70/3.74 | 33.94/34.47 | 4.55/4.92/3.13 | 31.20/36.43 | 0.42/0.97/0.86 | 51.54/−11.73 | 4.20/0.18/4.38 | −4.28/−95.94 |
| max | 12.01/6.83/5.26 | 56.22/22.93 | 10.04/5.92/4.40 | 56.16/25.68 | 0.78/0.98/0.96 | 19.10/−2.24 | 5.31/0.21/5.49 | −3.30/−96.20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Li, Y.; Yu, X.; Tan, H.; Yuan, J.; Zhu, M. Regional/Single Station Zenith Tropospheric Delay Combination Prediction Model Based on Radial Basis Function Neural Network and Improved Long Short-Term Memory. Atmosphere 2023, 14, 303. https://doi.org/10.3390/atmos14020303
Yang X, Li Y, Yu X, Tan H, Yuan J, Zhu M. Regional/Single Station Zenith Tropospheric Delay Combination Prediction Model Based on Radial Basis Function Neural Network and Improved Long Short-Term Memory. Atmosphere. 2023; 14(2):303. https://doi.org/10.3390/atmos14020303
Chicago/Turabian StyleYang, Xu, Yanmin Li, Xuexiang Yu, Hao Tan, Jiajia Yuan, and Mingfei Zhu. 2023. "Regional/Single Station Zenith Tropospheric Delay Combination Prediction Model Based on Radial Basis Function Neural Network and Improved Long Short-Term Memory" Atmosphere 14, no. 2: 303. https://doi.org/10.3390/atmos14020303