Bayesian Simultaneous Estimation of Unsaturated Flow and Solute Transport Parameters from a Laboratory Infiltration Experiment




Abstract
:1. Introduction
2. Materials and Methods
2.1. Laboratory Experiment
2.2. Numerical Model
2.3. Bayesian Parameter Inference
3. Results and Discussion
4. Conclusions
- -
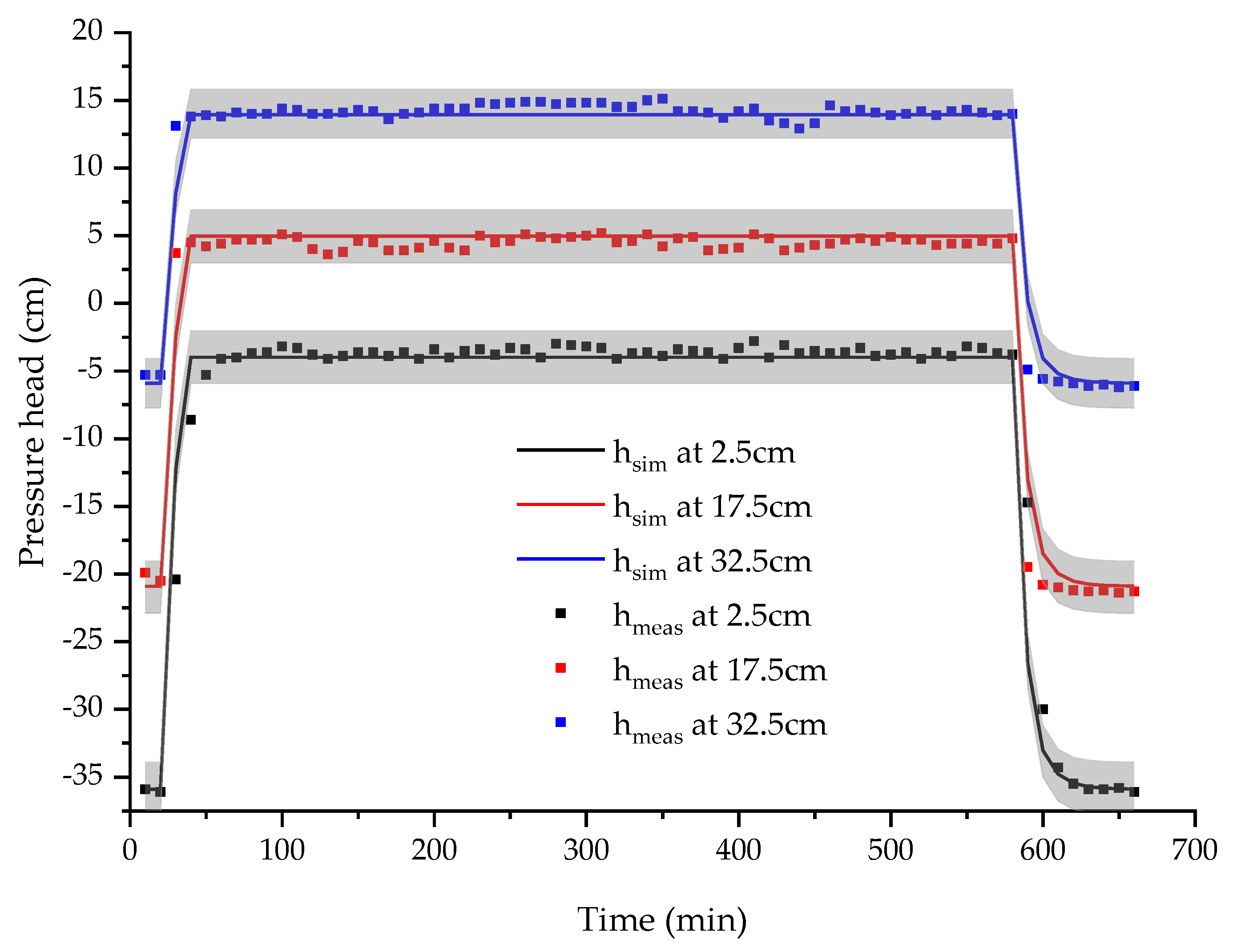
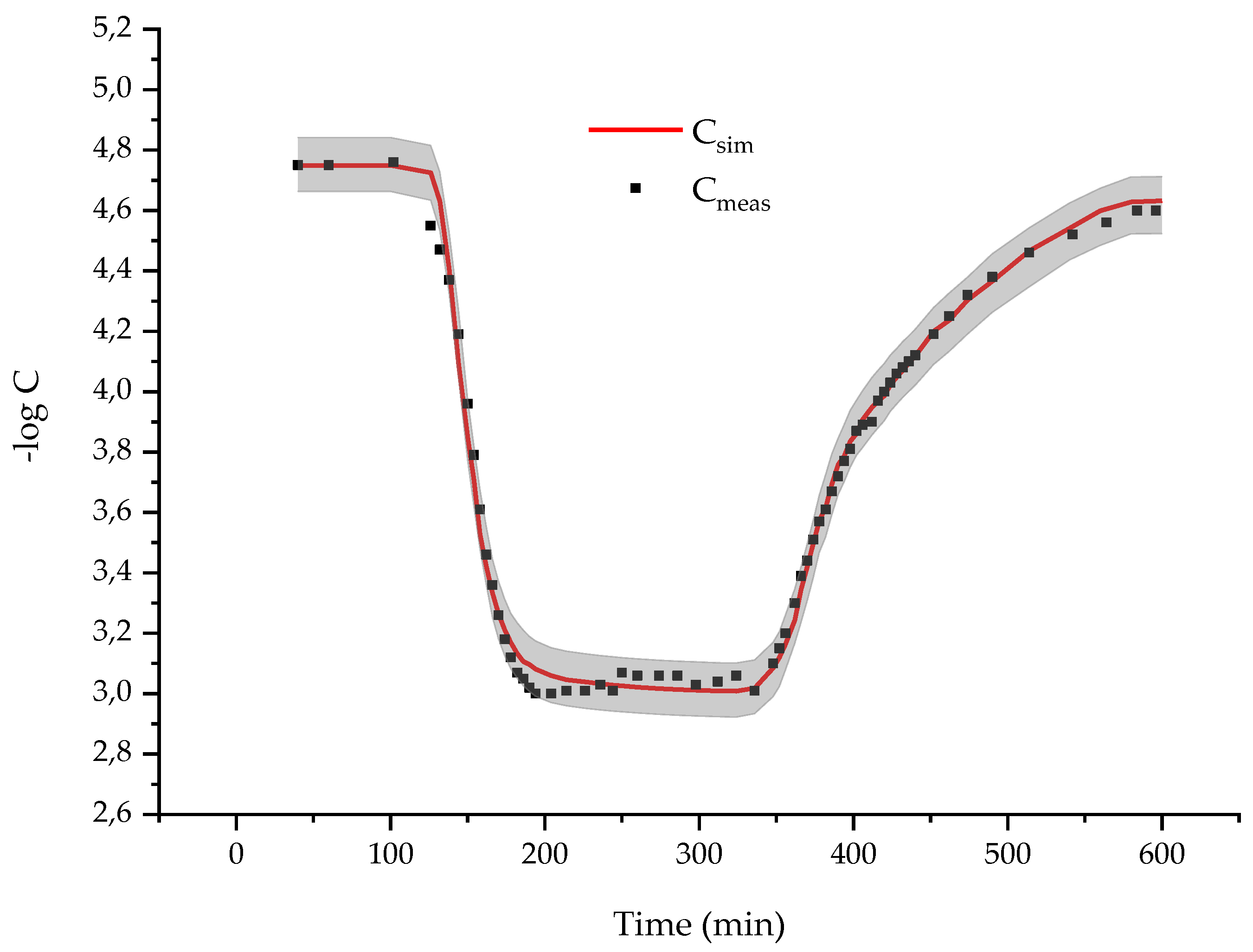
- The flow through the investigated soil can be well reproduced by the Richards equation combined with the Mualem/van-Genuchten models.
- -
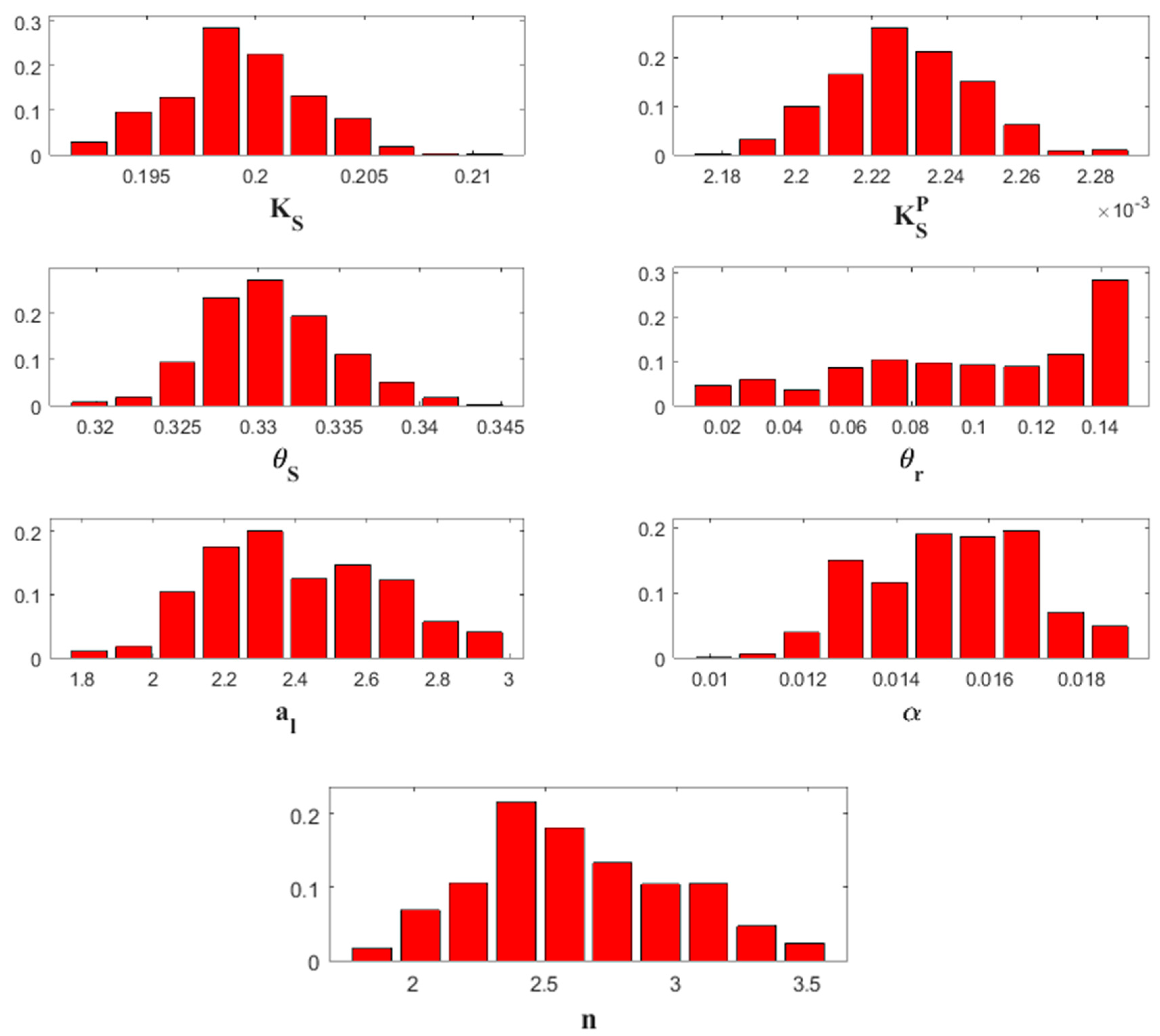
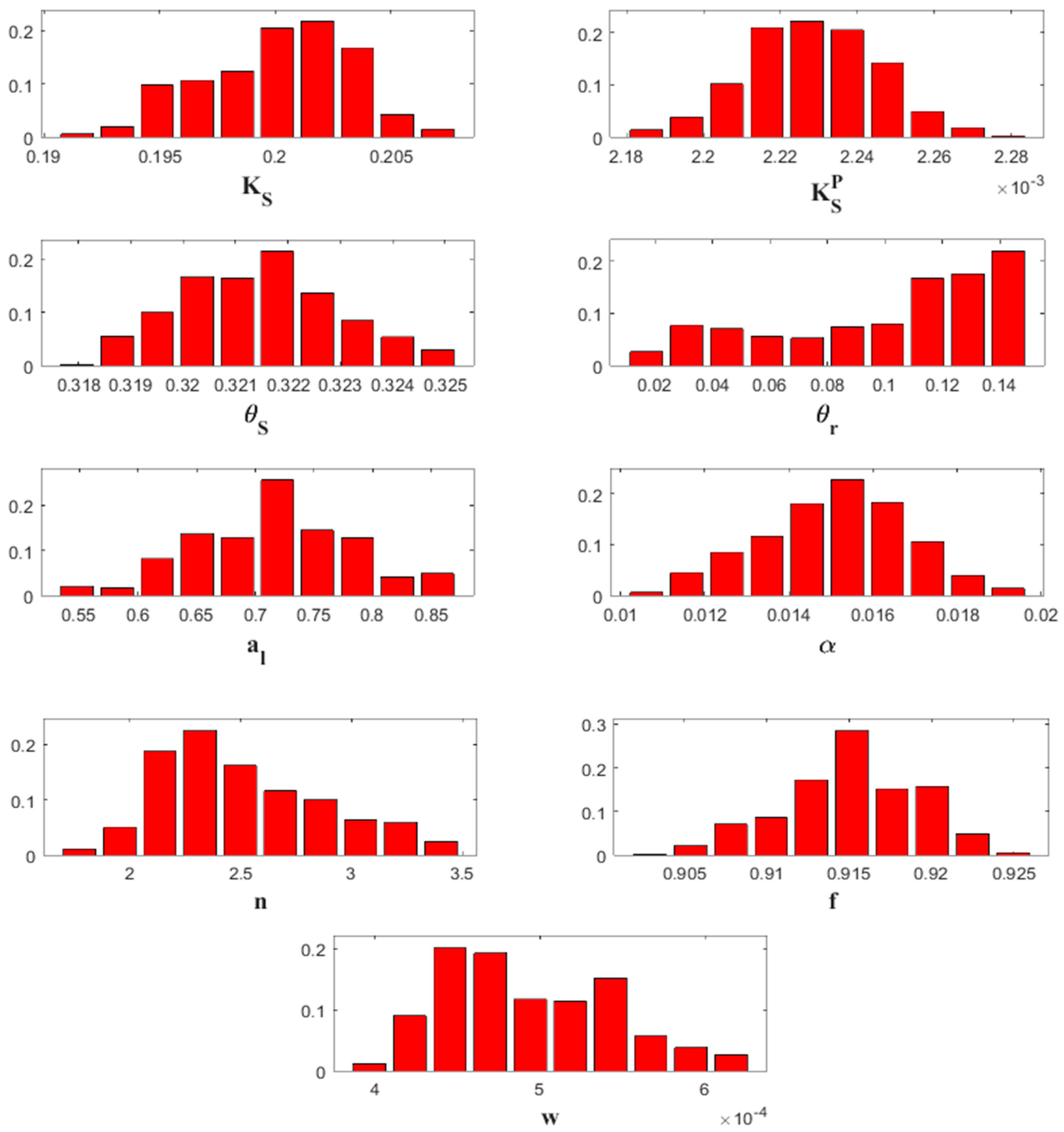
- The pressure head and outflow concentration measurements are able to identify all the unsaturated hydraulic and solute transport soil parameters, except the residual water content which was not identified with either of the models since dry conditions were not attained during the laboratory experiment.
- -
- significant difference was observed between the two models for the estimation of the dispersivity coefficient. Indeed, with the mobile–immobile transport model, the estimated value of was three times lower than the one obtained with the linear transport model. The associated uncertainty was also three times smaller with the mobile–immobile transport model.
- -
- The linear transport model yielded a good agreement between the measured and simulated pressure heads, but a less satisfactory matching was observed between measured and simulated concentrations. Furthermore, small uncertainties were obtained for pressure head responses, while very large uncertainties were assigned to the output concentrations.
- -
- The mobile–immobile transport model better reproduced the infiltration experiment. Indeed, a very good matching was obtained between measured and simulated concentrations. Furthermore, the concentration uncertainty region was much narrower than with the linear transport model.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kool, J.B.; Parker, J.C.; van Genuchten, M.T. Determining Soil Hydraulic Properties from One-step Outflow Experiments by Parameter Estimation: I. Theory and Numerical Studies. Soil Sci. Soc. Am. J. 1985, 49, 1348–1354. [Google Scholar] [CrossRef] [Green Version]
- Parker, J.C.; Kool, J.B.; van Genuchten, M.T. Determining Soil Hydraulic Properties from One-step Outflow Experiments by Parameter Estimation: II. Experimental Studies. Soil Sci. Soc. Am. J. 1985, 49, 1354–1359. [Google Scholar] [CrossRef]
- Van Dam, J.C.; Stricker, J.N.M.; Droogers, P. Inverse Method to Determine Soil Hydraulic Functions from Multistep Outflow Experiments. Soil Sci. Soc. Am. J. 1994, 58, 647–652. [Google Scholar] [CrossRef]
- Durner, W.; Schultze, B.; Zurmühl, T. State-of-the-Art in Inverse Modeling of Inflow/Outflow Experiments; University of California: Riverside, CA, USA, 1999. [Google Scholar]
- Beydoun, H.; Lehmann, F. Expériences de drainage et estimation de paramètres en milieu poreux non saturé. C. R. Geosci. 2006, 338, 180–187. [Google Scholar] [CrossRef]
- Puhlmann, H.; Von Wilpert, K.; Lukes, M.; Dröge, W. Multistep outflow experiments to derive a soil hydraulic database for forest soils. Eur. J. Soil Sci. 2009, 60, 792–806. [Google Scholar] [CrossRef]
- Kumar, S.; Sekhar, M.; Reddy, D.V.; Mohan Kumar, M.S. Estimation of soil hydraulic properties and their uncertainty: Comparison between laboratory and field experiment. Hydrol. Process. 2010, 24, 3426–3435. [Google Scholar] [CrossRef]
- Schelle, H.; Iden, S.C.; Peters, A.; Durner, W. Analysis of the Agreement of Soil Hydraulic Properties Obtained from Multistep-Outflow and Evaporation Methods. Vadose Zone J. 2010, 9, 1080–1091. [Google Scholar] [CrossRef]
- Durner, W.; Iden, S.C. Extended multistep outflow method for the accurate determination of soil hydraulic properties near water saturation. Water Resour. Res. 2011, 47, 13. [Google Scholar] [CrossRef]
- Younes, A.; Mara, T.A.; Fajraoui, N.; Lehmann, F.; Belfort, B.; Beydoun, H. Use of Global Sensitivity Analysis to Help Assess Unsaturated Soil Hydraulic Parameters. Vadose Zone J. 2013, 12, 1–12. [Google Scholar] [CrossRef]
- Moreira, P.H.S.; van Genuchten, M.T.; Orlande, H.R.B.; Cotta, R.M. Bayesian estimation of the hydraulic and solute transport properties of a small-scale unsaturated soil column. J. Hydrol. Hydromech. 2016, 64, 30–44. [Google Scholar] [CrossRef] [Green Version]
- Younes, A.; Zaouali, J.; Fahs, M.; Slama, F.; Grunberger, O.; Mara, T.A. Bayesian soil parameter estimation: Results of percolation-drainage vs infiltration laboratory experiments. J. Hydrol. 2018, 565, 770–778. [Google Scholar] [CrossRef]
- Szabó, N.P. A genetic meta-algorithm-assisted inversion approach: Hydrogeological study for the determination of volumetric rock properties and matrix and fluid parameters in unsaturated formations. Hydrogeol. J. 2018, 26, 1935–1946. [Google Scholar] [CrossRef]
- Abbaspour, K.C.; Johnson, C.A.; van Genuchten, M.T. Estimating Uncertain Flow and Transport Parameters Using a Sequential Uncertainty Fitting Procedure. Vadose Zone J. 2004, 3, 1340–1352. [Google Scholar] [CrossRef]
- Abbaspour, K.C.; Schulin, R.; van Genuchten, M.T. Estimating unsaturated soil hydraulic parameters using ant colony optimization. Adv. Water Resour. 2001, 24, 827–841. [Google Scholar] [CrossRef]
- Mishra, S.; Parker, J.C. Parameter estimation for coupled unsaturated flow and transport. Water Resour. Res. 1989, 25, 385–396. [Google Scholar] [CrossRef]
- Inoue, M.; Šimůnek, J.; Shiozawa, S.; Hopmans, J.W. Simultaneous estimation of soil hydraulic and solute transport parameters from transient infiltration experiments. Adv. Water Resour. 2000, 23, 677–688. [Google Scholar] [CrossRef]
- Laloy, E.; Weynants, M.; Bielders, C.L.; Vanclooster, M.; Javaux, M. How efficient are one-dimensional models to reproduce the hydrodynamic behavior of structured soils subjected to multi-step outflow experiments? J. Hydrol. 2010, 393, 37–52. [Google Scholar] [CrossRef]
- Diamantopoulos, E.; Iden, S.C.; Durner, W. Inverse modeling of dynamic nonequilibrium in water flow with an effective approach. Water Resour. Res. 2012, 48, 16. [Google Scholar] [CrossRef]
- Mara, T.A.; Delay, F.; Lehmann, F.; Younes, A. A comparison of two Bayesian approaches for uncertainty quantification. Environ. Model. Softw. 2016, 82, 21–30. [Google Scholar] [CrossRef] [Green Version]
- Younes, A.; Mara, T.; Fahs, M.; Grunberger, O.; Ackerer, P. Hydraulic and transport parameter assessment using column infiltration experiments. Hydrol. Earth Syst. Sci. 2017, 21, 2263–2275. [Google Scholar] [CrossRef] [Green Version]
- Kaipio, J.; Somersalo, E. Statistical and computational inverse problems; Springer: New York, NY, USA, 2005; ISBN 978-0-387-22073-4. [Google Scholar]
- Younes, A.; Mara, T.A.; Voltz, M.; Guellouz, L.; Musa Baalousha, H.; Fahs, M. A new efficient Bayesian parameter inference strategy: Application to flow and pesticide transport through unsaturated porous media. J. Hydrol. 2018, 563, 887–899. [Google Scholar] [CrossRef]
- Lee, P.M. Bayesian Statistics: An Introduction, 4th ed.; Wiley: Chichester, West Sussex, UK; Hoboken, NJ, USA, 2012; ISBN 978-1-118-33257-3. [Google Scholar]
- Zhu, H.; Liu, T.; Xue, B.; Wang, G. Modified Richards’ Equation to Improve Estimates of Soil Moisture in Two-Layered Soils after Infiltration. Water 2018, 10, 1174. [Google Scholar] [CrossRef]
- Mualem, Y. A new model for predicting the hydraulic conductivity of unsaturated porous media. Water Resour. Res. 1976, 12, 513–522. [Google Scholar] [CrossRef] [Green Version]
- Van Genuchten, M.T. A Closed-form Equation for Predicting the Hydraulic Conductivity of Unsaturated Soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef] [Green Version]
- Van Genuchten, M.T.; Wagenet, R.J. Two-Site/Two-Region Models for Pesticide Transport and Degradation: Theoretical Development and Analytical Solutions. Soil Sci. Soc. Am. J. 1989, 53, 1303–1310. [Google Scholar] [CrossRef]
- Clothier, B.E.; Vogeler, I.; Green, S.R.; Scotter, D.R. Transport in unsaturated soil: Aggregates, macropores, and exchange. In Physical Nonequilibrium in Soils: Modeling and Application; Ann Arbor Press: Chelsea, MI, USA, 1998; pp. 273–295. ISBN 9781575040493. [Google Scholar]
- Farthing, M.W.; Ogden, F.L. Numerical Solution of Richards’ Equation: A Review of Advances and Challenges. Soil Sci. Soc. Am. J. 2017, 81, 1257–1296. [Google Scholar] [CrossRef]
- Ku, C.-Y.; Liu, C.-Y.; Xiao, J.-E.; Yeih, W. Transient Modeling of Flow in Unsaturated Soils Using a Novel Collocation Meshless Method. Water 2017, 9, 954. [Google Scholar] [CrossRef]
- Zha, Y.; Yang, J.; Zeng, J.; Tso, C.-H.M.; Zeng, W.; Shi, L. Review of numerical solution of Richardson-Richards equation for variably saturated flow in soils. WIREs Water 2019, 6, e1364. [Google Scholar] [CrossRef]
- Fahs, M.; Younes, A.; Lehmann, F. An easy and efficient combination of the Mixed Finite Element Method and the Method of Lines for the resolution of Richards’ Equation. Environ. Model. Softw. 2009, 24, 1122–1126. [Google Scholar] [CrossRef]
- Fahs, M.; Koohbor, B.; Belfort, B.; Ataie-Ashtiani, B.; Simmons, C.; Younes, A.; Ackerer, P. A Generalized Semi-Analytical Solution for the Dispersive Henry Problem: Effect of Stratification and Anisotropy on Seawater Intrusion. Water 2018, 10, 230. [Google Scholar] [CrossRef]
- Miller, C.T.; Abhishek, C.; Farthing, M.W. A spatially and temporally adaptive solution of Richards’ equation. Adv. Water Resour. 2006, 29, 525–545. [Google Scholar] [CrossRef]
- Younes, A.; Zaouali, J.; Lehmann, F.; Fahs, M. Sensitivity and identifiability of hydraulic and geophysical parameters from streaming potential signals in unsaturated porous media. Hydrol. Earth Syst. Sci. 2018, 22, 3561–3574. [Google Scholar] [CrossRef] [Green Version]
- Hindmarsh, A.C. LSODE and LSODI, two new initial value ordinary differnetial equation solvers. ACM Signum Newsl. 1980, 15, 10–11. [Google Scholar] [CrossRef]
- Radhakrishnan, K. Description and Use of LSODE, the Livermore Solver for Ordinary Differential Equations; NASA report; NASA: Washington, DC, USA, 1993. [Google Scholar]
- Laloy, E.; Vrugt, J.A. High-dimensional posterior exploration of hydrologic models using multiple-try DREAM (ZS) and high-performance computing. Water Resour. Res. 2012, 48, W01526. [Google Scholar] [CrossRef]
- Vrugt, J.A.; ter Braak, C.J.F.; Clark, M.P.; Hyman, J.M.; Robinson, B.A. Treatment of input uncertainty in hydrologic modeling: Doing hydrology backward with Markov chain Monte Carlo simulation: FORCING DATA ERROR USING MCMC SAMPLING. Water Resour. Res. 2008, 44, W00B09. [Google Scholar] [CrossRef]
- Linde, N.; Ginsbourger, D.; Irving, J.; Nobile, F.; Doucet, A. On uncertainty quantification in hydrogeology and hydrogeophysics. Adv. Water Resour. 2017, 110, 166–181. [Google Scholar] [CrossRef]
- Younes, A.; Delay, F.; Fajraoui, N.; Fahs, M.; Mara, T.A. Global sensitivity analysis and Bayesian parameter inference for solute transport in porous media colonized by biofilms. J. Contam. Hydrol. 2016, 191, 1–18. [Google Scholar] [CrossRef]
- Hayek, M.; Younes, A.; Zouali, J.; Fajraoui, N.; Fahs, M. Analytical solution and Bayesian inference for interference pumping tests in fractal dual-porosity media. Comput. Geosci. 2018, 22, 413–421. [Google Scholar] [CrossRef]
- Rajabi, M.M.; Ataie-Ashtiani, B.; Simmons, C.T. Model-data interaction in groundwater studies: Review of methods, applications and future directions. J. Hydrol. 2018, 567, 457–477. [Google Scholar] [CrossRef]
- Gelman, A. Bayesian Data Analysis, 3rd ed.; Chapman & Hall/CRC Texts in Statistical Science; CRC Press: Boca Raton, FL, USA, 2014; ISBN 978-1-4398-4095-5. [Google Scholar]
- Hastings, W.K. Monte Carlo sampling methods using Markov chains and their applications. Biometrika 1970, 57, 97–109. [Google Scholar] [CrossRef]
- Gelman, A.; Rubin, D.B. Inference from Iterative Simulation Using Multiple Sequences. Stat. Sci. 1992, 7, 457–472. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Lower Bound | Upper Bound |
|---|---|---|
| (cm/min) | 0.01 | 0.3 |
| (cm/min) | 5 10−4 | 10−2 |
| (-) | 0.2 | 0.45 |
| (-) | 0. | 0.15 |
| (cm−1) | 0.001 | 0.1 |
| (-) | 1.5 | 7.0 |
| (cm) | 0.1 | 3.0 |
| (-) | 0.5 | 1. |
| (min−1) | 10−5 | 10−2 |
| Unit | Mean Estimated Value | Confidence Interval | Size of the CI | |
|---|---|---|---|---|
| (cm/min) | 0.2 | [0.19–0.21] | 0.013 | |
| (cm/min) | 0.0022 | [0.0021–0.0023] | 10−4 | |
| (-) | 0.33 | [0.32–0.34] | 0.016 | |
| (-) | 0.1 | [0.02–0.15] | 0.13 | |
| (cm−1) | 0.015 | [0.012–0.018] | 0.006 | |
| (-) | 2.57 | [1.96–3.4] | 1.43 | |
| (cm) | 2.36 | [1.98–2.91] | 0.93 |
| Unit | Mean Estimated Value | Confidence Interval | Size of the CI | |
|---|---|---|---|---|
| [cm/min] | 0.2 | [0.19–0.21] | 0.012 | |
| [cm/min] | 0.0022 | [0.0021–0.0023] | 1 10−4 | |
| [-] | 0.32 | [0.32–0.33] | 0.005 | |
| [-] | 0.11 | [0.02–0.15] | 0.13 | |
| [cm−1] | 0.015 | [0.012–0.018] | 0.007 | |
| [-] | 2.43 | [1.95–3.24] | 1.28 | |
| [cm] | 0.7 | [0.58–0.86] | 0.27 | |
| [-] | 0.915 | [0.907–0.922] | 0.015 | |
| [min−1] | 5 10−4 | [4 10−4–5.9 10−4] | 1.9 10−4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Younes, A.; Zaouali, J.; Kanzari, S.; Lehmann, F.; Fahs, M. Bayesian Simultaneous Estimation of Unsaturated Flow and Solute Transport Parameters from a Laboratory Infiltration Experiment. Water 2019, 11, 1660. https://doi.org/10.3390/w11081660
Younes A, Zaouali J, Kanzari S, Lehmann F, Fahs M. Bayesian Simultaneous Estimation of Unsaturated Flow and Solute Transport Parameters from a Laboratory Infiltration Experiment. Water. 2019; 11(8):1660. https://doi.org/10.3390/w11081660
Chicago/Turabian StyleYounes, Anis, Jabran Zaouali, Sabri Kanzari, Francois Lehmann, and Marwan Fahs. 2019. "Bayesian Simultaneous Estimation of Unsaturated Flow and Solute Transport Parameters from a Laboratory Infiltration Experiment" Water 11, no. 8: 1660. https://doi.org/10.3390/w11081660
APA StyleYounes, A., Zaouali, J., Kanzari, S., Lehmann, F., & Fahs, M. (2019). Bayesian Simultaneous Estimation of Unsaturated Flow and Solute Transport Parameters from a Laboratory Infiltration Experiment. Water, 11(8), 1660. https://doi.org/10.3390/w11081660