1. Introduction
With the emergence of industry 4.0, the significance of mechanical equipment in modern industrial technology has become increasingly prominent. As a symmetry device, the rolling bearing is a crucial component in mechanical equipment and plays a vital role in ensuring the efficient and stable operation of such equipment [
1]. Due to the long-term impact of thermal fatigue, alternating loads, mechanical vibration, wear, and other factors, it is also one of the most vulnerable mechanical components of mechanical equipment. Common types of faults include spalling, pitting, and wear. According to relevant statistics, the annual fault rate of rolling bearings is approximately 35%. Among these faults, the predominant issues are with the inner and outer rings and rolling bodies, accounting for about 90% [
2]. Once the rolling bearing fails, it will affect the reliability of the mechanical equipment, and even lead to catastrophic consequences. Therefore, studying the fault diagnosis methods of the rolling bearing is essential to ensure mechanical equipment’s accuracy, reliability, and safety and to extend its service life [
3,
4].
Common fault diagnosis techniques for rolling bearings include methods based on vibration, sound, electrical, and temperature signals, among others. Among these, methods based on vibration signals are the most commonly used. Scholars have extensively researched methods for fault diagnosis in rolling bearings. In traditional fault diagnosis methods, qualitative approaches tend to be relatively imprecise and contain redundant information, and may lead to non-unique diagnosis results [
5]. Methods that rely on semi-quantitative information can have significant errors. Diagnosis methods that rely on analytical models require precise parameters for the dynamic modeling of rolling bearings. However, due to the complex working environment and the difficulty in identifying fault mechanisms, the applicability of this method is limited.
In recent years, machine learning, especially deep learning, has been extensively utilized in monitoring bearing conditions and diagnosing faults in rotating machinery [
6,
7,
8]. Compared to traditional methods that rely on manual feature extraction, deep learning models have potent capabilities for extracting features at a deep level and have achieved tremendous success in the latest applications for machine state monitoring and fault diagnosis [
9,
10]. For instance, Qiao et al. [
11] utilized deep convolutional and LSTM recurrent neural networks to concurrently capture the temporal and frequency domain characteristics of vibration signals to achieve end-to-end fault diagnosis. Long et al. [
12] proposed a multi-scale convolutional capsule network that integrates the multi-scale features extracted by a CNN with the spatial relationship features in CapsNet for the fault diagnosis of industrial robots. Huo et al. [
13] presented an improved Adaptive Dimension Conversion–CNN approach for fault diagnosis. In this approach, 1D vibration signals were transformed into 2D matrices and then input into a 2D-CNN, fully leveraging the CNN’s ability to extract features from 2D data.
Data imbalance can significantly impact the stability and reliability of deep learning model training, leading to a substantial decrease in the performance of fault diagnosis models. Therefore, a significant amount of balanced data is crucial for training the deep diagnostic model to achieve accurate and reliable fault diagnosis results. However, in practical situations, mechanical equipment usually operates under normal working conditions, making it easy to collect sufficient operational data from the equipment under these conditions. On the contrary, mechanical equipment seldom operates under fault conditions, making it challenging to gather enough fault samples [
14]. As a result, obtaining an extensive and balanced dataset to train deep learning models is difficult, significantly limiting the ability of deep learning models to achieve accurate fault diagnosis.
To solve the problem of imbalanced datasets in fault diagnosis, an increasing number of researchers have been investigating effective solutions [
15,
16]. For instance, Wu et al. [
17] proposed a novel adaptive oversampling technique based on expectation maximization (EM) for local weighted minority oversampling in industrial fault diagnosis. Mao et al. [
18] proposed a sequence prediction method based on an extreme learning machine to tackle the issue of imbalanced fault diagnosis, which incorporated the principal curve and granulation division to simulate the flow and overall distribution of fault data, effectively preserving the important features of fault samples. Shi et al. [
19] proposed an undersampling technique that utilizes linear discriminant analysis and the gray wolf optimizer algorithm for threshold adjustment to improve the performance of fault classification.
However, the traditional methods mentioned above have a common drawback; they may generate incorrect or unnecessary samples and fail to increase the diversity of the original fault samples, resulting in issues such as overfitting and poor generalization ability, and only low diagnosis accuracy can be obtained.
In recent years, with the development of deep learning, the generative adversarial network (GAN) provides an alternative approach to addressing imbalanced fault diagnosis [
20]. Originally used as a framework for generating images, the GAN has been proven to exhibit strong performance in image generation. However, the quality of the samples generated by the GAN is inferior due to unstable training. Therefore, to improve the performance of the GAN, an increasing number of models derived from the GAN have been proposed [
21,
22]. For example, to address the issue of data imbalance in practical industrial environments, Liu et al. [
23] transformed 1D original vibration signals into 2D grayscale images and proposed an auxiliary classification GAN based on spectral normalization and gradient penalty. This GAN is employed to generate high-quality samples and incorporate them into the original dataset for data augmentation. Similarly, Fu et al. [
24] proposed a small-sample data enhancement method for rotating machinery based on a fusion attention-guided Wasserstein GAN. This method reduces the multisensor data to three channels by principal component analysis, then converts the 1D data of each channel into a 2D pixel matrix and generates an RGB image by fusing the three-channel 2D image. Liu et al. [
25] proposed an imbalanced fault diagnosis method based on an improved multi-scale residual GAN. By designing a multi-scale residual network structure and hybrid loss function, the original GAN model is improved, and high-quality time–frequency features are generated to balance fault data distribution. Xu et al. [
26] proposed a semi-supervised conditional GAN with spectral normalization to generate time–frequency fault images with a similar distribution.
However, the existing imbalanced fault diagnosis methods based on the 2D time–frequency images mentioned above still face the following two drawbacks. (1) They all extract features from images in the spatial domain [
27]. The images generated by these methods suffer from blurring, artifacts in texture details, and degradation of fake images compared to real images in terms of color. (2) They still suffer from inadequate extraction of local and global features. Although some models incorporate spatial or channel attention to overcome this deficiency [
28,
29], they do not consider the internal connection between these two types of attention, and are computationally complex, seriously affecting the reliability of diagnosis results.
The reasons for the limitations mentioned above are that the neural network tends to prioritize fitting the low-frequency components of the objective function when processing input images, especially as the network’s depth increases. On the other hand, the image’s texture details and color information are part of the high-frequency information, which the neural network does not prioritize fitting during training. Secondly, in the spatial domain, the color and brightness information of images are integrated through the intensity of pixel values in the three RGB channels. Therefore, processing the image in the spatial domain will impact the color information due to the lower brightness value. In contrast, in the frequency information domain, the image’s color information is primarily represented as high-frequency components, while the brightness information of the image is mainly represented as low-frequency components. Therefore, when processing the image in the frequency information domain, color and brightness are independent of each other, reducing interference between them.
Inspired by the above analysis, a novel data augmentation framework in which image enhancement based on a dual-branch GAN combining spatial and frequency domain information is established to improve the quality of the generated image. Meanwhile, the spatial domain information processing branch utilizes an auxiliary classification generative adversarial network (ACGAN) with a discriminator that can distinguish between true and false and realize fault diagnosis. The main contributions of this paper are summarized as follows:
- (1)
A new dual-branch image enhancement GAN model combined with spatial and frequency domain information is proposed. Guided by the frequency domain GAN branch, the spatial domain ACGAN generates high-quality images with distinct texture details and vivid color. The generative capacity of this model significantly enhances the quality of the generated TF images, effectively addressing the data imbalance problem. Meanwhile, the auxiliary classifiers can achieve precise fault classification.
- (2)
The shuffle attention [
30] module based on spatial and channel attention mechanisms is integrated into the proposed model to form a pixel-level feature extraction network. The network is motivated to extract the local and global features of fault samples fully, enhancing the network’s expressive power. Compared to other attention modules, shuffle attention uses a parallel computation model, which makes it easier to focus on sensitive feature information and reduces computational complexity.
- (3)
The Wasserstein distance and gradient penalty are incorporated into the loss function of the proposed model, significantly enhancing the data generation capability and solving the problems of gradient explosion and mode collapse during training.
The rest of this paper is organized as follows. We provide a brief introduction to the theory related to the GAN and its improved models in
Section 2. We introduce the detailed structure and training method of the proposed model in
Section 3.
Section 4 discusses the experimental results and analysis of rolling bearing fault diagnosis. Finally,
Section 5 summarizes the entire paper and gives a conclusion.
2. Basic Theory
In fault diagnosis tasks of rolling bearings, data imbalance often leads to overfitting and model instability, which reduces the accuracy and reliability of fault diagnosis. The generative adversarial network (GAN) is widely recognized as effective for generating high-quality images and data. Meanwhile, the GAN excels in learning and capturing complex data distributions, especially when dealing with imbalanced data. With the advancement of GAN technology, many variants have been proposed. These improved models offer better performance and generation results, making them more suitable for the imbalanced fault diagnosis of rolling bearings. Therefore, in this paper, GANs are employed to generate samples of specific fault categories to address the issue of data imbalance. This method can effectively enhance the quality of the generated data and fault diagnostic accuracy. Accordingly, the principles of the GAN and its derived models will be described in detail.
2.1. The GAN and Its Improved Models
The GAN [
31] comprises a generator G and a discriminator D, which participate in a mutually antagonistic game. The decisions made by both sides of the game will combine to form a Nash equilibrium point, at which neither side will be able to increase their benefits through their behavior. During the training process, the generator constructs a mapping space
Pz that satisfies the joint Gaussian distribution, gradually fitting the input noise
z to the distribution
Pr of real samples
x to generate a new sample distribution
Pg. The discriminator’s task is to receive true sample distribution
Pr and the generated sample distribution
Pg, and to distinguish between the authenticity of input samples. The ultimate objective is to identify the position that minimizes the losses of the generator and discriminator. The objective function of the entire process is as follows:
where
E represents the expectation of the corresponding distribution,
G(
z) denotes the generated sample from generator, and
D signifies the output of discriminator.
However, traditional GAN models suffer from defects such as training instability and mode collapse. The ACGAN [
32] introduces conditional attribute information, which improves the model’s training stability and convergence speed while generating more diverse and attribute-specific samples. The loss function of the ACGAN includes discriminative loss and classification loss, and its general framework is shown in
Figure 1. The discriminative loss function is as follows:
where
x and
cr represent the real data and their respective category labels;
cg represents the label of the generated samples.
cg and
z are input into generator G together to obtain the generated sample
G(
z,
cg), while
D[
G(
z,
cg)] represents the probability that the discriminator D judges the generated
G(
z,
cg) to be true.
The classification loss function compels the generator to generate samples that align with the specified target category. The classification loss function is as follows:
where
P(
c|
x) represents the probability distribution of the category labels computed by the auxiliary classifier C.
In summary, the total loss functions during ACGAN training are as follows:
During adversarial training, the discriminator needs to minimize LD, and the generator needs to minimize LG.
2.2. CWGAN-GP
The reliability of the ACGAN still needs to be improved because it uses JS divergence to distinguish the distance between the real distribution Pr and the fake distribution Pg. Furthermore, the JS divergence is discrete. When the two distributions of Pr and Pz do not overlap, the value of JS divergence remains a constant. This can make the model susceptible to gradient vanishing and mode collapse.
The CWGAN model is proposed to solve the problems mentioned above. It uses the Wasserstein distance to measure the discrepancy between these two distributions and can effectively address the limitations of the JS divergence. The Wasserstein distance is calculated as
where Π(
Pr,
Pz) represents the set of all possible joint distributions obtained by combining the true sample distribution
Pr with the generated sample distribution
Pz. For each possible joint distribution
γ, one can sample (
x,
G(
z))~
γ from it to obtain samples
x and
G(
z), and ǁ
x −
G(
z)ǁ represents the distance between the pairs of samples. Since it is impossible to solve for an exact lower bound on the Wasserstein distance directly, the Kantorovich–Rubinstein dual form is used. The Wasserstein distance is converted as
where sup is the minimum upper bound.
f is a continuous function, ǁ
fǁ
L≤
K indicates that
f must satisfy the Lipschitz continuity condition, and there exists a constant
K ≥ 0 such that it meets |
f(
x) −
f(
G(
z))| ≤
K|(
x −
G(
z)| in the domain of definition. The objective function of the CWGAN is
where Δ denotes the set of 1-Lipschitz functions. To implement the CWGAN, the discriminator D should belong to 1-Lipschitz functions, and it should satisfy condition |
D(
x) −
D(
G(
z))| ≤ |
x −
G(
z)|. To meet this requirement, the CWGAN truncates the discriminator D’s parameters at [
−c,
c] after each iteration.
However, this optimization strategy is susceptible to gradient explosion. To tackle this issue, Gulrajani et al. [
33] proposed the gradient penalty term, which effectively solves the problem above by incorporating the gradient penalty term (GP) into the CWGAN. The objective function of the CWGAN-GP is as follows:
where
λ represents the gradient penalty weight,
xr and
xg represent the data in the real distribution
Pr and the fake distribution
Pz,
is the data sampled by random interpolation of random noise on the line between
xr and
xg,
represents the set of sampled data,
ε represents the random number obeying the uniform distribution, and
represents the
L2-paradigm of the gradient of the D.
2.3. ACWGAN-GP
The ACWGAN-GP [
34] effectively solves the shortcomings of traditional GAN models described above. It significantly enhances the reliability of GAN model training and improves the quality of the generated samples. The main idea is to use an ACGAN-based Wasserstein distance and evaluate the difference between the fake distribution and real distribution while employing a gradient penalty to satisfy the Lipschitz constraints. The loss function of the ACWGAN-GP is as follows:
where
P(
Y =
y|
Sreal) represents the probability distribution on the category labels.
In summary, the GAN possesses a powerful ability to generate high-quality images and data samples. However, its training process often encounters instability issues, such as gradient vanishing and mode collapse, compromising its robustness in practical applications. To address these challenges, researchers have proposed various enhancement methods. The ACGAN builds upon the original GAN by introducing conditional attribute information, leading to more diverse and attribute-specific generated samples. Nonetheless, it remains susceptible to gradient vanishing, and the model’s performance requires further optimization. The CWGAN-GP effectively addresses the issues of pattern collapse and gradient vanishing by incorporating the Wasserstein distance and gradient penalty terms. However, compared with the original GAN, the CWGAN-GP requires more training data to achieve enhanced generative capability and stability. The ACWGAN-GP combines the advantages of the ACGAN’s conditional attribute information and the CWGAN-GP’s training stability. Although its complexity increases the computational requirements, the ACWGAN-GP can generate high-quality samples with robust classification performance, positioning it as an excellent choice for imbalanced fault diagnosis of rolling bearing.
2.4. Continuous Wavelet Transform Feature Extraction
The continuous wavelet transform (CWT) [
35] is widely used to extract the time and frequency domain features of the original vibration signals, the essence of which is to describe the original signal by translating and scaling the wavelet mother function; the time domain information of the signal is obtained by translating, and the frequency domain information of the signal is obtained by scaling the wavelet mother function. Wavelet analysis can locally amplify the time–frequency domain of the signal, adjust the scale factor, and change the time resolution of low-frequency and high-frequency signals and frequency resolution to adapt to the signals of different compositions, so the wavelet analysis method shows promising results in fault diagnosis, image processing, and other aspects.
Assuming the vibration signal is
, the wavelet transform can be represented as follows:
where a
b R,
a > 0 are the scaling and translation factors, respectively.
ψa,b(⸱) is the scaling and translation factor. Analyzing the signal through the expansion of
ψ(
t) in the scale and the translation in the time domain, i.e., decomposing the existing time-domain signal into a two-dimensional time–frequency plane, is a TF domain analysis, which is more conducive to the extraction of local features of the original vibration signal. Generally, rolling bearing faults are always expressed as impulse shocks, whose shapes are similar to Morlet wavelets. Therefore, this paper uses a Morlet wavelet as the basis function to transform the original vibration signals into TF images with apparent local features.
This paper employs the CWT to convert one-dimensional original vibration signals into two-dimensional time–frequency images, which are used as inputs to the proposed enhanced GAN model. Accordingly, the GAN’s excellent image generation capability is utilized to generate time–frequency images of specific fault categories and balance the original dataset.
3. The Proposed Method
In the spatial domain, images represent color and brightness information by combining intensity values across the three RGB channels. Low brightness values can affect the color information in TF images. Conversely, in the frequency domain, color and brightness information are represented by high-frequency and low-frequency components. Therefore, when dealing with TF images in the frequency domain, the color and brightness information are independent and do not interfere.
Based on the above problem and aiming at the problem of color distortion in images generated by existing 2D image-based GAN models for imbalanced fault diagnosis, this paper proposes a novel image enhancement model based on a dual-branch GAN combining spatial and frequency domain information. The overall flowchart of the proposed model is shown in
Figure 2. The spatial domain information processing branch utilizes an auxiliary classification GAN, which comprises a generator (G) and a discriminator (D). Meanwhile, the frequency domain information processing branch uses a GAN with a frequency generator (FG) and a frequency discriminator (FD). A fast Fourier transform is used to transform the input image from the spatial domain to the frequency domain. The MSE is integrated into the loss function of both generators to enhance the consistency of frequency information for the generated images. Two of the GANs receive the same noise and labeling information and the ACWGAN-GP is responsible for generating high-quality image samples and balancing the original dataset. Finally, the auxiliary classifier is trained with a balanced dataset to achieve intelligent imbalanced fault diagnosis of the rolling bearing.
3.1. Fast Fourier Transform and Consistency Measure Mean Square Error Loss
3.1.1. Fast Fourier Transform
In image processing, the FFT is an effective method for separating the frequency information components of an image from the spatial domain [
36]. Therefore, this paper utilizes the FFT to separate the frequency information of the input image from the spatial domain. The computational method of the FFT is defined as follows:
where
S(
x,
y) denotes the pixel value of the image at the spatial domain coordinate (
x,
y);
H and
W are the height and width of the image, respectively. After the FFT operation, the input image will get the spectrogram with the same size as
H and
W, which is the representation of the image in the frequency domain. The
F(
u,
v) represents the frequency components’ intensity and phase information at the frequency domain’s spectral coordinates (
u,
v).
3.1.2. Consistency Measure Mean Square Error Loss
Consistency measure mean square error (MSE) is a commonly used statistical metric to measure the difference between the expected and actual values. It has a significant advantage in calculating the discrepancy in pixel values between two images [
37]. The formula is defined as follows:
where
yi and
xi represent the actual and expected values of the
ith frequency component, respectively, and
N represents the total number of frequency components.
For the training loss of the proposed model, the discriminator loss function of the spatial domain generative model is kept consistent with the ACWGAN-GP mentioned above, according to the knowledge discussed in
Section 2. At the same time, by introducing the MSE loss into the generator, the loss of the spatial domain generator network is as follows:
Accordingly, the frequency information branch using the CWGAN-GP and the loss function of the frequency generator is as follows:
where α is a hyperparameter to adjust the weight ratio between the two loss functions, and the α is set to 0.01 in this paper.
This paper introduces MSE loss in the two generators to evaluate the disparity between the frequency information of the spatial and frequency domain pseudo-images. The gradients of the loss functions of the two generators are updated during training to enhance the consistency of the frequency information for the generated images. Therefore, the frequency information branch can supervise the spatial information branch in learning the detailed texture features of images more comprehensively, allowing the G to generate fault images with a higher resolution.
3.2. Shuffle Attention Module
Recently, the use of attention mechanisms in fault diagnosis has become increasingly widespread. Efficient channel attention (ECA) focuses on the intrinsic connections between pixel-level feature information. The convolutional block attention mechanism (CBAM) enables the model to focus on the spatial relationships of features and the intrinsic connection between channels by combining spatial and channel attention [
38,
39]. However, they do not adequately consider the intrinsic connection between spatial and channel attention mechanisms and still have limitations in terms of computational efficiency.
To enhance the expression ability of the proposed model and alleviate the computational burden caused by the dual GAN structure, the shuffle attention (SA) module is proposed, employing a parallel computation approach that enables the model to extract global feature information and reduce computational complexity significantly.
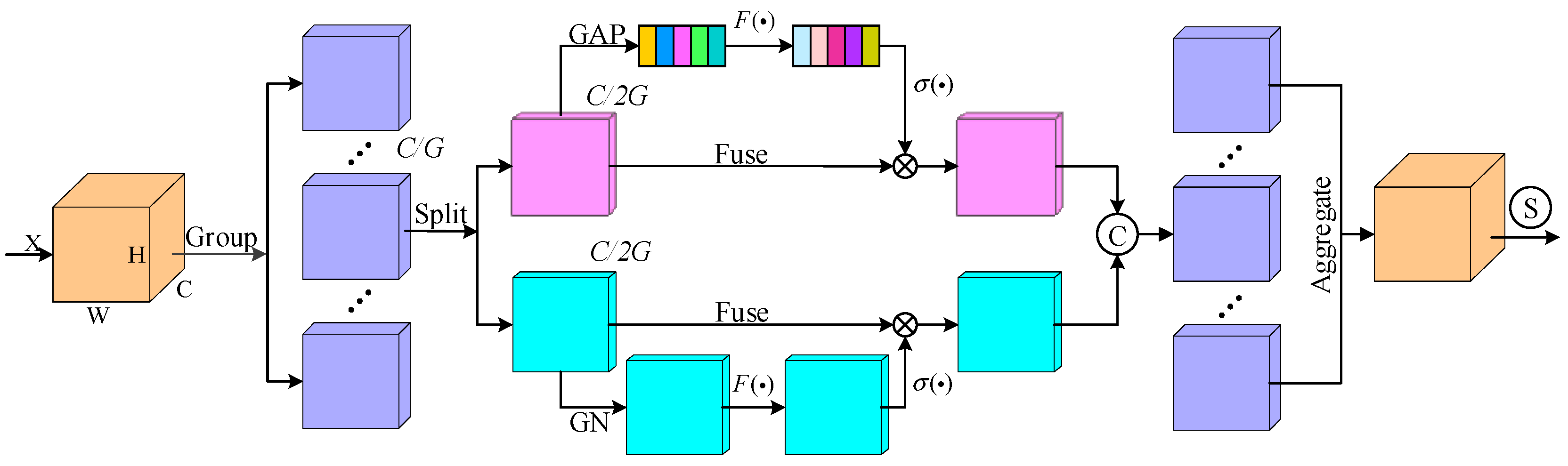
As shown in
Figure 3, the input feature map is denoted as
, where
C represents the number of channels,
H represents the height, and
W represents the width. Additionally, SA sets the value of
G as the segmentation parameter. The input feature map
X is divided into
G sub-feature maps along the channel to form a branch, denoted as
X = [
X1, …,
XG] and
. Each branch
Xk is computed in parallel during the feature extraction process, enhancing computation speed and obtaining new weight parameters through the attention module in the feature extraction process. After each branch enters the attention module,
Xk is further subdivided into two branches along the channel, denoted as
Xk1,
;
Xk1 and
Xk2 form the preliminary channel attention feature map and spatial attention feature map through the feature information between channels and sub-feature maps, respectively. At this point, the model obtains the source information of different feature maps.
To enhance the integration of feature information between the channel attention and the spatial attention feature map, the overall feature information is extracted using global average pooling (GAP), denoted as
, and
Xk1 is recomputed using the overall feature information.
The sigmoid activation function is utilized to regulate the fusion of the dual-channel feature information, and the final channel attention output is:
where
W1 and
are the parameters used to rescale the output feature map.
Spatial attention focuses more on the source of information. After calculating the output of channel attention obtained by
Xk1, it is also necessary to calculate the spatial attention of
Xk2. This ensures that all feature information can be effectively obtained when the two branches are merged. The group norm (GN) is used for
Xk2 to obtain the spatial features, and then the enhancement
F(⸱) is applied. The final output of spatial attention is
where
W2 and
merge the two attention feature map branches, denoted as
X′k = [
X′k1,
X′k2]
,
W1,
b1,
W2,
b2, and the GN hyperparameters are generated in the SA module, and the number of channels in each branch is split by the
G-parameter, ensuring that the SA is sufficiently lightweight. Finally, the shuffle operator is used to merge and flow the feature information of each branch along the channels across the branches, ensuring that the final output of the SA module is consistent with the size of
X.
In summary, compared with other attention mechanisms, shuffle attention allows the input feature information to flow between different channels. This enables the effective capture of the relationship between global and local features in both spatial and frequency domains. In addition, it can perform both spatial and channel branching feature extraction, making it more computationally efficient and lightweight. Therefore, in this paper, shuffle attention is incorporated into the proposed model to enhance the feature extraction capability of the network while reducing the computational burden associated with the dual GAN structure.
3.3. Overall Flow of the Proposed Method
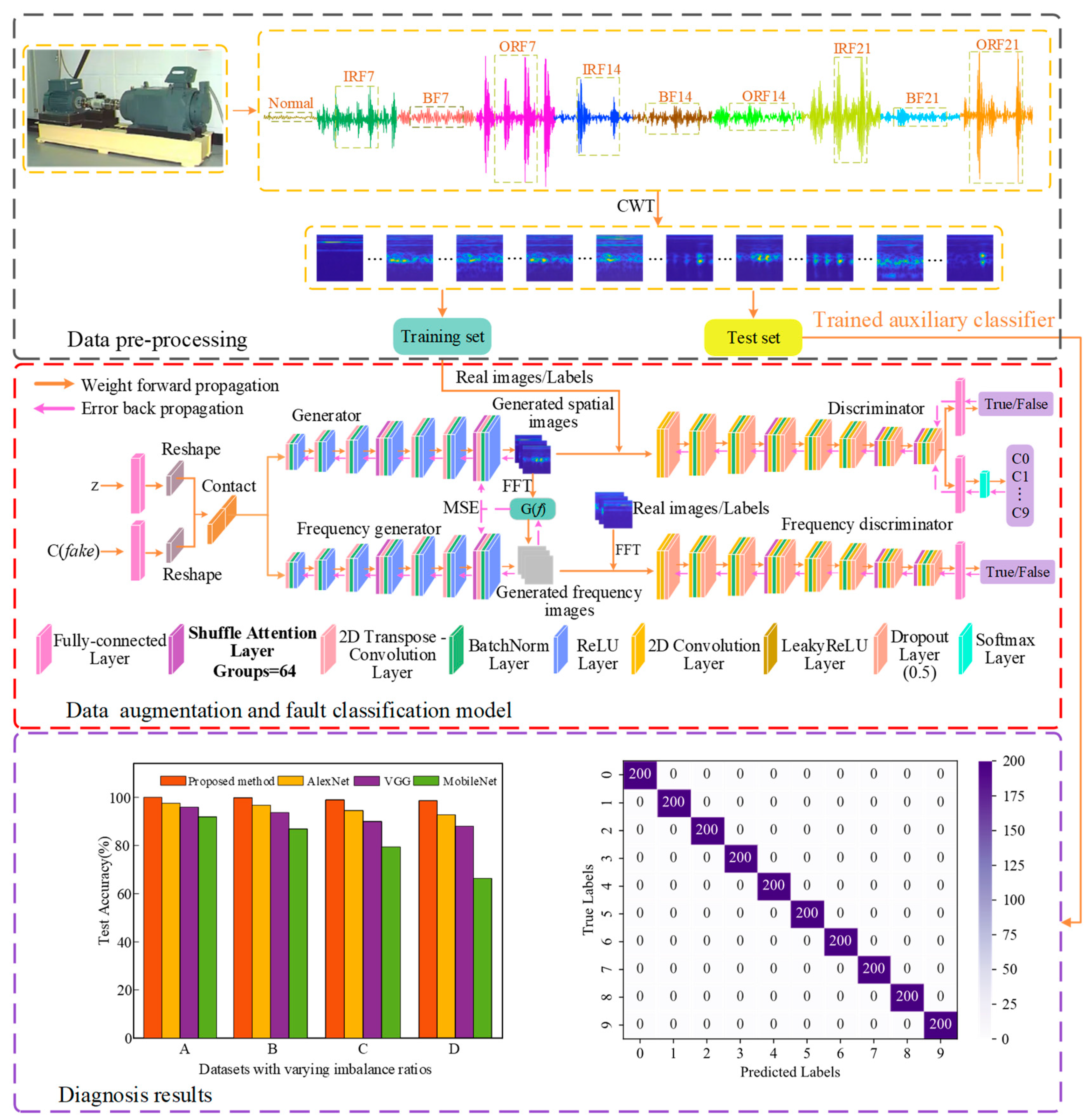
This paper aims to generate time–frequency images with sufficient texture details and color information to improve fault diagnosis accuracy. A dual-branch GAN model that combines information from both the spatial and frequency domains of images is proposed. The general flow of the proposed diagnosis method is shown in
Figure 4. In the spatial domain generator, 100-dimensional noise and the label C (fake) are input into a fully connected (FC) layer. A reshape function transforms the FC layer’s output into 4 × 4 × 384 images. Then, seven feature extraction modules are employed, each containing a convolution layer, batch normalization, and ReLU activation function. The 4th and 7th feature extraction modules contain shuffle attention layers. The size of the image is altered by employing multiple 4 × 4 convolution kernels. The number of output channels of the last layer is 3, corresponding to the channels of the RGB image. Simultaneously, the discriminator consists of 8 feature extraction modules, and the input image size is 64 × 64 × 3. The shuffle attention layer is included in the 4th and 8th feature extraction modules. To enhance the discriminator’s performance, the LeakyReLU activation function is employed. The output layer constructs an auxiliary classifier using the softmax activation function to achieve fault learning and recognition. The detailed network parameters of G and D are shown in
Table 1. It is worth noting that the network parameters of the frequency domain WGAN-GP are the same as those of the spatial domain ACWGAN-GP, except that the last layer of the FG has only one output channel and does not include a fully connected layer with a softmax activation function.
The TF images are divided into a training set and a test set with a ratio of 4:1, and the balanced dataset is used to train the auxiliary classifier in the spatial discriminator. Then, the performance of the trained classifier is evaluated using the test set. During the training of the proposed model, the learning rates of the two sets of generators and discriminators are set to 0.0001 and 0.0002, respectively. The number of training iterations for the generative task is 500, while the number of training iterations for the auxiliary classifier is 200, and the batch size is 32. Adam’s algorithm is used as the optimizer for this model, with momentum parameters β1 and β2 set to 0.5 and 0.999, respectively. The model also utilizes LeakyReLU and Dropout with parameters of 0.2 and 0.5, and the value of the gradient penalty coefficient λ is 5.
5. Conclusions
To address the issues of insufficient texture details and color distortion in the image generated by the existing image-based imbalanced fault diagnosis models, this paper proposes a novel image enhancement model based on a dual-branch GAN combining spatial and frequency domain information for imbalanced fault diagnosis of rolling bearing. First, the method applies a CWT to convert the 1D raw data into 2D time–frequency images. Then, a Wasserstein distance and gradient penalty are incorporated into the loss functions of the proposed model to prevent gradient vanishing and mode collapse. Therefore, in the proposed model, the spatial domain information processing branch employs an ACWGAN-GP, while a CWGAN-GP is applied to the frequency domain information processing branch after the fast Fourier transform. Subsequently, the MSE is integrated into the loss functions of both generators to enhance the consistency of frequency information for the generated image. SA is also incorporated into this model to alleviate the computational load resulting from the dual GAN structure and enhance the expression ability of the network. Under the supervision of the frequency domain information processing branch, the ACWGAN-GP generates high-quality TF images and balances the original dataset. Finally, the auxiliary classifier is used to train the balanced dataset for comprehensive feature extraction and accurate fault diagnosis.
Experimental results on two bearing datasets indicate the high feasibility of the proposed method in both theory and practice. By comparing the performance with the existing state-of-the-art generative models, the results indicate that this method can generate higher-quality images with more apparent texture details and color information and enhance fault diagnosis performance and generalization ability. In addition, comparing the results of different diagnostic models indicates that the proposed method maintains high diagnosis accuracy on both datasets.
Although the integration of SA in the proposed model can alleviate the computational burden imposed by the dual GAN to some extent, the training of the proposed model is still time-consuming. Therefore, future research will further explore how to reduce the training time of the model more effectively and combine the frequency domain information of images with unsupervised learning. Furthermore, it is worth noting that the proposed method only applies to specific fault types and experimental subjects. Therefore, future work will incorporate transfer learning to diagnose more complex fault classes.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}