
Pursuit and Evasion Linear Differential Game Problems with Generalized Integral Constraints


1
Department of Mathematical Sciences, Faculty of Physical Sciences, Bayero University Kano, Gwarzo Road, Kano PMB 3011, Nigeria
2
Department of Mathematics and Applied Mathematics, Sefako Makgatho Health Sciences University, Medunsa, Pretoria 0204, South Africa
3
Department of Mathematics and Statistics, Faculty of Science and Technology, Rajamangala University of Technology Phra Nakhon (RMUTP), Bang Sue, Bangkok P.O. Box 10800, Thailand
*
Author to whom correspondence should be addressed.
Symmetry 2024, 16(5), 513; https://doi.org/10.3390/sym16050513
Submission received: 31 December 2023
/
Revised: 26 January 2024
/
Accepted: 4 February 2024
/
Published: 24 April 2024
(This article belongs to the Special Issue Symmetry in Fractional Calculus: Advances and Applications)
{kind=link}
Abstract
:In this paper, we study pursuit and evasion differential game problems of one pursuer/one evader and many pursuers/one evader, respectively, in the space . In both problems, we obtain sufficient conditions that guarantee the completion of a pursuit and an evasion. We construct the players’ optimal strategies in both problems, and we estimate the possible distance that an evader can preserve from pursuers. Lastly, we illustrate our results via some numerical examples.
1. Introduction
In differential games, pursuit and evasion conflicts represent challenging problems with important applications in the fields of aerospace and robotics. In pursuit–evasion problems, the synthesis of intelligent actions must consider the adversary’s potential strategies. Differential game theory provides an adequate framework to analyze possible outcomes of a conflict without assuming particular behaviors by the opponent [1].
The problems usually involve two key players (namely, pursuer and evader) or autonomous agents with conflicting objectives; generalizations are typical in the sense of multiple players divided into two teams—the pursuer team and the evader team. The main purpose is to construct strategies and provide sufficient conditions that enable an autonomous agent to perform a set of actions against the opponent; for instance, the pursuer aims at determining a strategy that will result in the capture or interception of the evader. The dynamics of the players are often described by system ordinary (partial) differential equations. The players’ control functions or strategies are usually subjected to integral, geometric, and mixed (that is, both integral and geometric) constraints. In this work, we are interested in pursuit and evasion differential game problems where players’ dynamics are governed by ordinary differential equations and control functions subject to integral constraints.
2. Preliminaries
Among the early works on linear differential games is the work of Pshennichnyi and Onopchuk [2], where the dynamics of the game are described by the linear equation
where the coefficients A and b (as well as c) are a constant matrix and an n dimensional vector, respectively, and the control functions of the pursuer and the evader, and , are subject to the integral constraints
respectively, where and are given positive numbers (usually interpreted as the maximum energy resources of the pursuer and the evader, respectively). The authors [2] obtained some conditions for the completion of a pursuit. To this end, they proposed a formula for the optimal pursuit time and constructed optimal strategies for the pursuer.
Motivated by the results in [2], some authors [3,4,5,6,7,8,9,10,11,12,13,14] studied this class of problem and proposed various methods of solving the pursuit and evasion problems with integral or other form of the aforementioned constraints on the players’ control functions. For instance, Rakhmanov et al. [3] studied a linear pursuit differential game of one pursuer and one evader. Controls of the pursuer and the evader are subjected to integral and geometric constraints, respectively. Conditions of completion of a pursuit in the game from all initial points of players are obtained. Ibragimov et al. [4] recently studied an evasion differential game of one evader and many pursuers with players’ dynamics described by linear differential equations. The control functions of players are subjected to integral constraints. They solved the evasion problem under the assumption that the total energy of pursuers does not exceed the energy of an evader. The rest of the papers [11,13,14] are concerned with a pursuit and evasion problem where geometric constraints are imposed on the players’ control functions. A generalized case of the geometric constraints (that is, Gronwall–Bellman-type constraints) was proposed in the work of Samatov [5], where a simple pursuit differential game was considered. Here, we are more interested in differential game problems with integral constraints.
In [6], the authors obtained sufficient conditions that guarantee a pursuit and also an evasion in a differential game with integral constraints. To this end, pursuers’ and evader’s optimal strategies are constructed. The results are demonstrated with some illustrative examples.
Chikrii and Belousov [7] proposed a scheme that uses the ideas of the method of resolving functions and established sufficient conditions for the termination of a pursuit in some guaranteed time.
Azimov [8] studied the evasion version of the pursuit problem in [7] with integral constraints on players’ control functions, and obtained sufficient conditions for an evasion from any given point in the phase space.
Ibragimov et al. [15] considered both pursuit and evasion problems with the control function of the players subject to integral constraints. The case where the control resources of the pursuer are less than or equal to that of the evader is studied. For this case, the authors proposed a new method for solving the evasion problem. For construction, the strategy of the evader information about the state of the system and the control resources of the players is used.
Ibragimov and Hasim [16] studied a pursuit–evasion differential game in the space with the dynamic equation of the players described by
where is a scalar, ; integral constraints were imposed on the players’ controls and solved an evasion problem when the total resource of the pursuers was less than that of the evader. Ibragimov et al. [9] also examined a pursuit–evasion differential game in the space with players’ motion described by
where and are matrices; players’ control functions were subject to integral constraints. The authors constructed optimal strategies of the players (pursuer and evader) when the control resource of the pursuer was greater than that of the evader and obtained the optimal pursuit time.
Recently, Ahmed et al. [10] studied a pursuit differential game on a closed convex subset K of with dynamic equations of the players described by
where is a scalar function, ; control functions of the players were subject to the more general integral constraints
where and are given positive numbers. The authors [10] obtained a sufficient condition for the completion of a pursuit. Rilwan et al. [6] also studied an evasion version of the problem [10] with and obtained sufficient conditions that guaranteed the avoidance of contact of the evader from the pursuers. To this end, they constructed the evader’s optimal strategy.
It is worth mentioning that the dynamic equations in [10] above can be transformed to the form (2) by simply letting and = be scalars. This transformation and also the fact that the integral constraints (3) generalize the existing integral constraints in the literature motivated the following research question: is it possible to solve a pursuit and evasion problem with players’ dynamics described in [9] with the integral constraints (3) imposed on players’ control function? Answering this question will indeed generalize some results on pursuit and evasion problems in the literature (see, for example, [3,4,5,6,8,9,10,11,12,14,16,17]).
Players’ dynamics in pursuit and evasion problems are not always restricted to the linear differential Equation (2). Badakaya et al. [18] investigated a pursuit–evasion differential game involving a countable number of pursuers and one evader with players’ dynamics described by certain -order differential equations and the constructed players’ optimal strategies. Jamilu et al. [19] also studied a pursuit–evasion differential game problem in which countably many pursuers chase one evader in the Hilbert space for a fixed period of time. The control function for each of the players satisfies an integral constraint; the dynamic equations of the pursuers and evader were governed by first- and second-order differential equations, respectively, and constructed optimal strategies for the players and found the value of the game. Azimov et al. [20] studied a differential game of many pursuers and one evader, where all the players moved only along the one-skeleton graph of an orthoplex of the dimension . The authors obtained the optimal number of pursuers in the game. In [21], a two-player pursuit evasion differential game and a time optimal zero control problem in were considered. The optimal control for the corresponding zero control problem was found. A strategy for the pursuer that guaranteed a solution for the pursuit problem was constructed.
In summary, the main objective of this paper is to address the above research question. More precisely, we find sufficient conditions for the completion of a pursuit and also for an evasion in the differential game described as in (2) with the integral constraints (3) imposed on players’ control function.
The rest of this paper is organized as follows: In Section 3, we present the players’ dynamics and the definitions of some basic terms. This is followed by the main results in Section 4, which comprises two subsections: one of the sections, Section 4.1, is concerned with pursuit problems where we give sufficient conditions for the completion of the pursuit, while Section 4.2 presents sufficient conditions that guarantee evasion. Section 5 presents examples to illustrate our results, and Section 6 concludes the paper.
3. Statement of the Problem
Consider the space with the norm defined as
The dynamic equations of pursuers and an evader are given by
where is the state of the pursuers and the evader at time t, and and are the control functions of the pursuer and evader, respectively. The dynamic Equations (4) and (5) can be expressed in closed form as
where , , , and are continuous matrices, and and are the control functions of the pursuers and the evader, respectively. The pursuers’ aim at any point in time is to to force the state towards the origin of the space (that is, for all ) against any action of the evader who, on the other hand, tries to avoid this. We find the possibilities/conditions for which the conflicting players can achieve their aims in this work.
Definition 1
([22], p. 43). Let be a measurable space. A real- or complex-valued function f is said to be -measurable, or just measurable, if it is or measurable, where and are the σ-algebra in the range space unless otherwise specified. In particular, is Lebesgue (resp. Borel) measurable if it is (resp. measurable: likewise,
Let be the set of Lebesgue measurable functions and be such that . Then
for any .
Definition 2.
A function (resp. ) with measurable coordinates such that
where (and also σ) are positive numbers, is called the admissible control of the pursuer (evader, respectively).
Definition 3.
A function , is called a strategy of the jth pursuer if the system (6) has a solution , at for every admissible control of the evader v(·). If each control generated by this strategy is admissible, then the pursuer’s strategy is admissible.
Definition 4
([16]). A function , is referred to as the strategy of the evader if
- For any admissible control of the pursuers, , the system (6) has a unique solution at
- The inequalityholds.
Definition 5.
Definition 6
According to Definition 6, we have , since . That is, the state variable of the pursuer and evader does not coincides at all times .
Problems:
- i.
- ii.
- iii.
4. Main Results
In this section, we address the research problems stated in Section 3. To this end, we will construct the respective players’ admissible strategies and find the conditions required in the problems i and , and then estimate the distance in the problem .
4.1. Conditions That Guarantee Completion of Pursuit
By dropping the index j in (4), we consider the differential game problem of one pursuer and one evader in this section. That is, the players’ dynamics (4) now reduce to
where , , , and are continuous matrices, and and are the control functions of the pursuer and the evader subject to
respectively; , .
Assumption 1.
The matrix is diagonal.
Lemma 1.
The following properties hold for all square matrices A, B, and C.
- i.
- ;
- ii.
- ;
- iii.
- , for all diagonal matrices .
It follows from Assumption 1 and Lemma 1 that the solution of Equation (9) is
It is worth mentioning that in this problem, q belongs to the set of natural numbers and the matrix is not necessarily a diagonal matrix.
Let
and
where
Assumption 2.
The matrix is nonsingular for all
Lemma 2.
For any square matrix function and a constant vector , we have
Lemma 3.
In whenever .
Lemma 4.
Let A be an matrix and be an n-vector with the norm and , respectively, defined by
respectively, then
Lemma 5.
The exponential of a diagonal matrix M is equal to the exponential of its entries.
In view of Lemmas (2)–(5), we state sufficient conditions for the completion of a pursuit in the games (6) and (7) as follows.
Theorem 1.
Proof.
Let the hypotheses of the theorem hold. We construct a pursuer’s strategy as follows:
To employ the strategy (15) for showing a completion pursuit, we first establish its admissibility as follows:
By applying Lemma 4, the inequality (16) becomes
This implies that
Hence, it follows from Definition 2 that the strategy (15) is admissible.
Suppose that the pursuer employs the admissible strategy (15) on the interval , then from Equation (12), we have
That is,
This implies
Consequently, from (11), we have
This implies . Hence, the conclusion of Theorem 1 follows. That is, a pursuit is completed at the time as long as Assumptions 1 and 2 hold, and the total energy resources of the pursuer are greater than that of the evader . □
Remark 1.
As mentioned earlier, we note here that if the matrices and (some scalar function), the result obtained here reduces to that of Ahmed et al. [10]. Additionally, if , where and , the pursuit problem considered here reduces to that of Ibragimov and Hasim [16]. The authors [16] solved the pursuit problem by partitioning the time interval and established the completion of the pursuit problem by induction, which is a bit tedious. Here, we solve a more general case via a comprehensive and straightforward method of proof. Moreover, the symmetric conditions on the matrices and play an important role in the construction of the pursuer’s strategies in this section.
In the next section, Section 4.2, which concerns an evasion problem, we consider the case of m pursuers and one evader with players’ dynamics and constraints on players’ control functions as stated in (6) and (7), respectively.
4.2. Conditions That Guarantee Evasion
It follows from Assumption 1 that is also diagonal with the entries , .
Observe that the vector has the coordinates
Let
We now state the following sufficient conditions that guarantee evasion in the differential game problems (6) and (7) below.
Theorem 2.
Proof.
The proof will be presented in three parts, namely, construction of an evader’s strategy, evasion, and estimation of the distance between the evader and the pursuers.
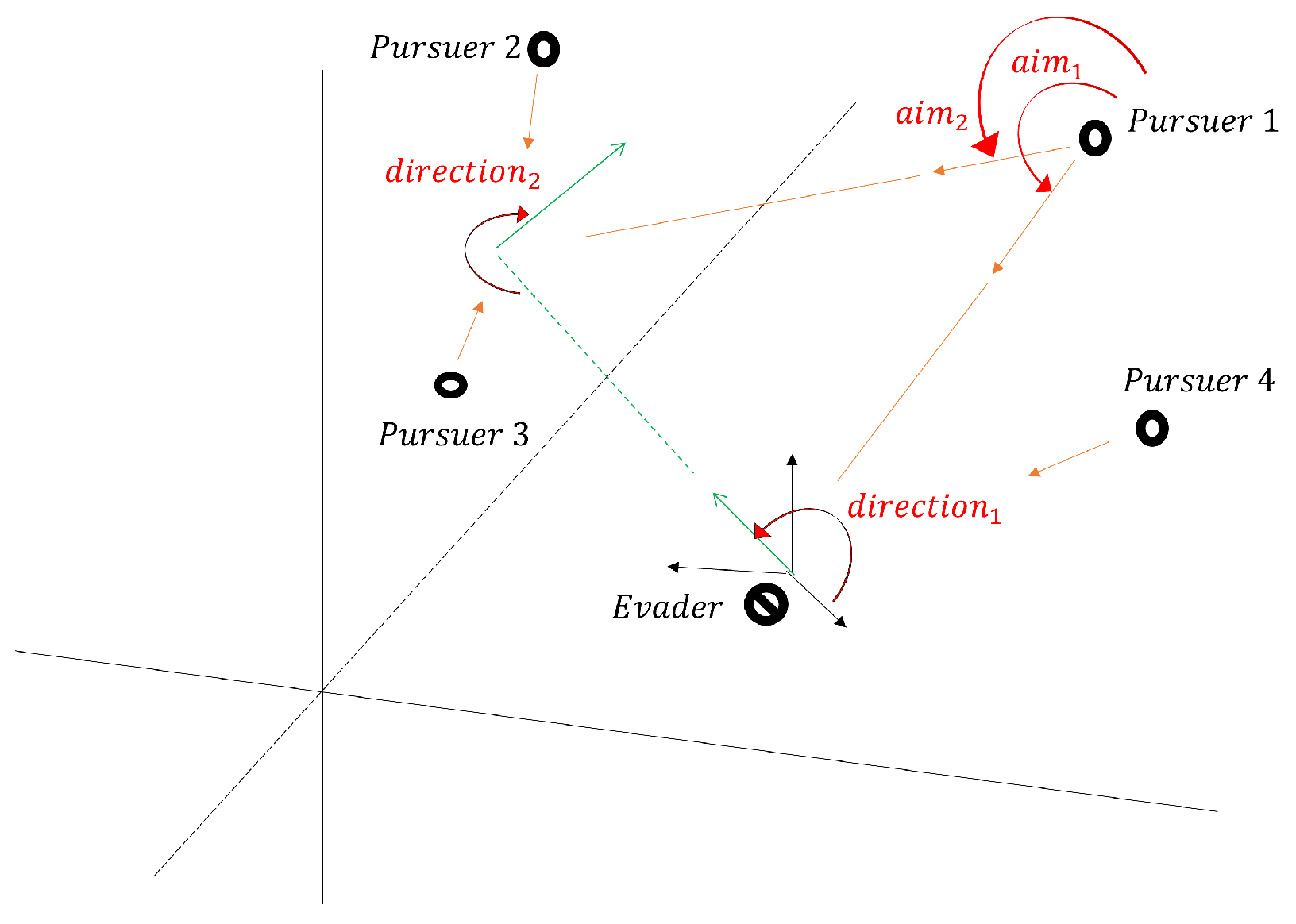
- Construction of evader’s strategyConsider the octant (that is, a coordinate axis that divides an n dimensional space into regions) in given bywhereLetbe the octant with negative coordinates. Since there are octants in the space , then there exists an octant that does not contain . Let be the octant that does not contain ; that is, is a vector in a region with at least one non-negative coordinate.Let the evader use the following strategy, , where the coordinatesfor all .According to the strategy (20), for each coordinate, the evader applies a control which allows keeping its distance on this coordinate from any of the pursuers moving in the direction of the coordinate. This is further illustrated in the space as in the Figure 1 below.Next, we show the admissibility of the strategy (20):That isHence, the strategy is admissible.
- EvasionHere, we show that evasion is possible for any given initial position of the players =, , . That is, holds for all , .Letbe the set of octants with at least one non-negative coordinate. That is, if, for instance, , then : for all and .Now consider the point , where and i is chosen in such a way that has coordinates . It is easy to see thatWe now show that evasion is guaranteed if the evader’s strategy (20) is employed. To this end, we substitute (20) in (18) and use the inequality (21) as follows:That is, , which implies , for all . Since the point is arbitrary, then it follows from Definition 6 that evasion is possible for the evader in the games (6) and (7). This completes the proof of Theorem 2.The smallest possible distance the evader can maintain from any of the m pursuers is estimated in the section below.
- Estimation of the distance of the evader from the pursuersWe already have for all and for all . Let denote the initial distance of the evader from the pursuer; thenNote that for all and for all .Since for all j, then we haveThis impliesfor all .Setfor all ; then we have , . That is, the smallest distance the evader can maintain from the pursuer is the value .
□
Figure 1.
Illustration of the evader’s strategy (20).
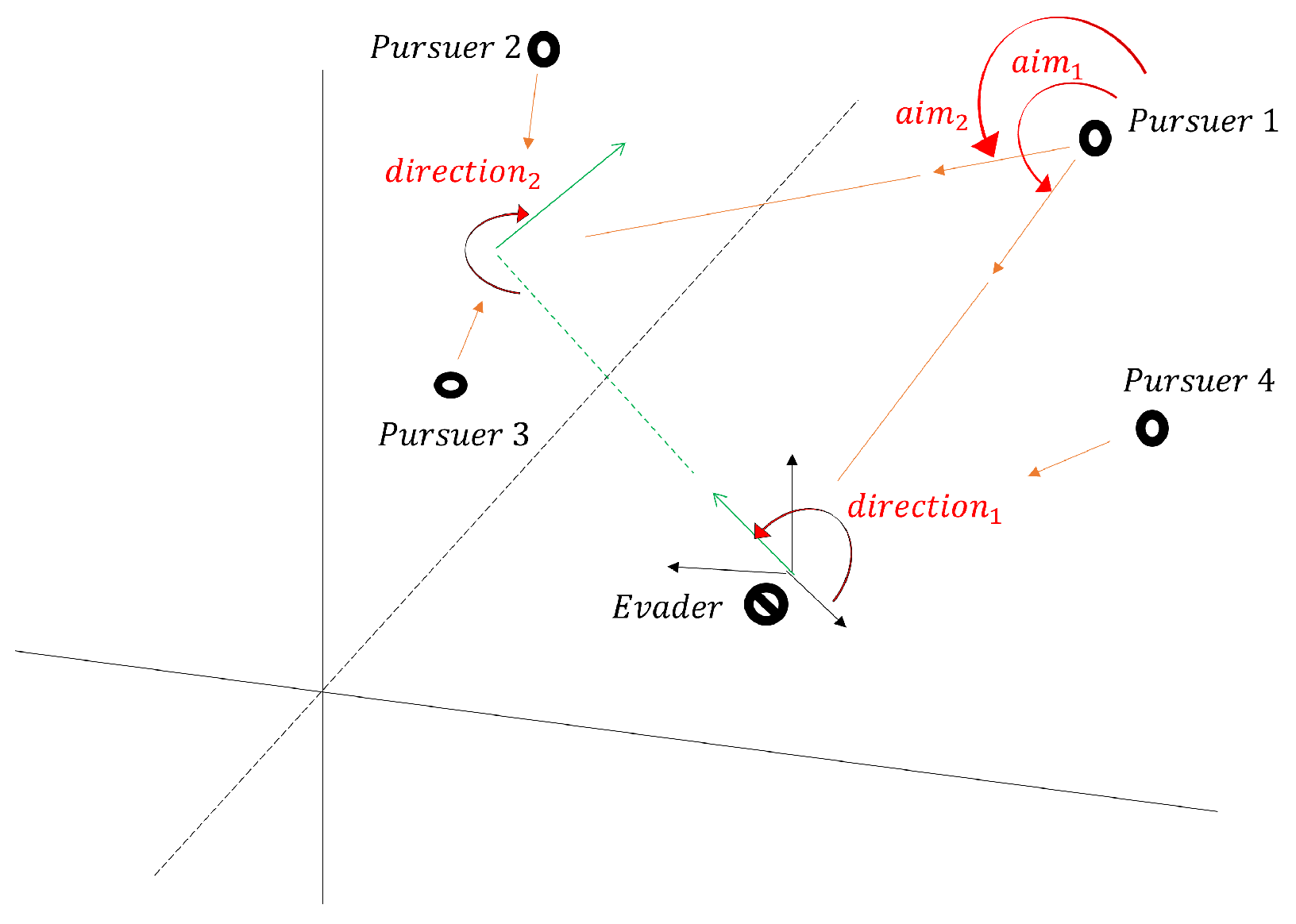
Figure 1.
Illustration of the evader’s strategy (20).
Remark 2.
It is worth noting that if the matrices and (some scalar function), the result obtained here for an evasion problem reduces to that of Rilwan et al. [6] irrespective of the space considered. Additionally, if where and , the evasion problem considered here reduces to that of Ibragimov and Hasim [16] and also Ibragimov et al. [4]. We employ a similar method of proof as in [16], but with more general dynamic equations and also constraints in our work. The method of proof employed in this section is indeed an improvement of the proposed method of solving an evasion problem in [9], where a similar dynamic equation is considered with .
5. Illustrative Examples
This section presents examples to illustrate our results. Numerical values are assigned to the players’ initial positions and also to all the parameters employed. In addition, the matrix functions and are specified.
5.1. Example (Pursuit Problem)
Consider a differential game with the initial positions of the pursuer and evader given as and , respectively, and a fixed time with a dynamic equation described by
where
Then from the definition of in (14),
The control functions of players are subject to
This implies that .
First, we verify the hypothesis of Theorem 1 as follows, since it is required that
L.H.S.
R.H.S.
Thus,
Hence, a pursuit is possible at time since the hypothesis in Theorem 1 is satisfied.
Now is equivalent to .
Applying the following strategy,
we have
which shows that a pursuit is completed.
5.2. Example (Evasion Problem)
Consider the motions of countably many pursuers , and an evader E in the space governed by the equation
where
where . The control functions and are subject to
respectively.
Given the initial position of the pursuers and evader as and , respectively, observe that is not contained in the octant for each and
Let since ; then by Theorem 2, if the evader adopts the admissible strategy , where
avoidance of contact from all the pursuers is guaranteed for all . That is, for any arbitrary point , , we have
Hence, , ∀.
6. Conclusions
We have studied the pursuit and evasion differential game of many pursuers and one evader in , with generalized integral constraints imposed on the players’ control functions. Given some sufficient conditions and a finite time , we solved the pursuit problem through the construction of an admissible pursuer’s strategy and showed that, indeed, the strategy guarantees a completion of a pursuit at time . To solve the evasion problem, we constructed a coordinate-wise evader’s strategy in such a way that for each coordinate, the evader keeps its distance away from any of the pursuers on the coordinate. We further estimated the smallest possible distance the evader can preserve from any of the pursuers at a given finite time. Compared with some of the problems studied in the literature [2,4,6,7,10,12,14,16,23], which are actually particular cases of the problems in this paper, we have solved both pursuit and evasion problems described by more general dynamic equations and more general integral constraints via a comprehensive and straightforward method of proof.
Following this research, we propose the following interesting problems for future study: the first is to construct the guaranteed pursuit time, and the second is to estimate the value of the game with respect to the game dynamics and constraints considered in this work.
Author Contributions
Conceptualization, B.M.U. and J.R.; methodology, B.M.U., J.R. and K.M.; validation, J.R., M.A. and K.M.; writing—original draft preparation, B.M.U. and J.R.; writing—review and editing, M.A. and K.M.; funding acquisition, K.M. and M.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Rajamangala University of Technology Phra Nakhorn (RMUTP) Research Scholarship.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest. Moreover, the funders had no role in the design of the study, in the writing of the manuscript, or in the decision to publish the results.
References
- Weintraub, I.E.; Pachter, M.; Garcia, E. An introduction to pursuit-evasion differential games. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 1049–1066. [Google Scholar]
- Pshenichnyi, B.N.; Onopchuk, Y.N. Linear differential games with integral constraints. Dokl. Akad. Nauk SSSR 1968, 1, 13–22. [Google Scholar]
- Rakhmanov, A.; Ibragimov, G.I.; Ferrara, M. Linear pursuit differential game under phase constraint on the state of evader. Discret. Dyn. Nat. Soc. 2016, 2016, 1289456. [Google Scholar] [CrossRef]
- Ibragimov, G.; Ferrara, M.; Ruziboev, M.; Pansera, B.A. Linear evasion differential game of one evader and several pursuers with integral constraints. Int. J. Game Theory 2021, 50, 729–750. [Google Scholar] [CrossRef]
- Samatov, B.T. The strategy of parallel pursuit for differential game of the first order with Gronwall-Bellman constraints. J. Eng. Sci. Technol. 2020, 2, 15–20. [Google Scholar]
- Rilwan, J.; Kumam, P.; Ibragimov, G.; Badakaya, A.J.; Ahmed, I. A differential game problem of many pursuers and one evader in the Hilbert Space l2. Differ. Equations Dyn. Syst. 2023, 31, 925–943. [Google Scholar] [CrossRef]
- Chikrii, A.A.; Aleksandr, A.B. On linear differential games with integral constraints. Trudy Inst. Mat. Mekhaniki UrO RAN 2009, 4, 290–301. [Google Scholar] [CrossRef]
- Azimov, A.Y. Linear differential pursuit game with integral constraints on the control. Differ. Uravn. 1975, 11, 1723–1731. [Google Scholar]
- Ibragimov, G.; Azamov, A.A.; Khakestari, M. Solution of a linear pursuit-evasion game with integral constraints. Anziam J. 2010, 52, E59–E75. [Google Scholar] [CrossRef]
- Ahmed, I.; Kumam, W.; Ibragimov, G.; Rilwan, J. Pursuit differential game problem with multiple players on a closed convex set with more general integral constraints. Thai J. Math. 2020, 18, 551–561. [Google Scholar]
- Ibragimov, G.; Akhmedov, A.; Izzati, P.N.; Manaf, N.A. Pursuit differential game described by infinite first order 2-systems of differential equations. Malaysian J. Math. Sci. 2017, 11, 181–190. [Google Scholar]
- Azimov, A.Y. A linear differential evasion game with integral constraints on the controls. USSR Comput. Math. Math. Phys. 1974, 14, 56–65. [Google Scholar] [CrossRef]
- Ibragimov, G.; Rikhsiev, B.B. On some sufficient conditions for optimality of the pursuit time in the differential game with multiple pursuers. Autom. Remote Control. 2006, 67, 529–537. [Google Scholar] [CrossRef]
- Ibragimov, G.; Khakestari, M.; Kuchkarov, A.S. Solution of a linear pursuit-evasion differential game with closed and convex terminal set. ITB J. Sci. 2012, 44, 1–12. [Google Scholar] [CrossRef]
- Ibragimov, G.; Rahmanov, A.; Alias, I. Construction of Strategies of Pursuers in a Differential Game of Many Players with State and Integral Constraints. In International Conference on Mathematical Sciences and Statistics 2013: Selected Papers; Springer: Singapore, 2014; pp. 37–43. [Google Scholar]
- Ibragimov, G.; Hasim, R.M. Pursuit and evasion differential games in Hilbert space. Int. Game Theory Rev. 2010, 12, 239–251. [Google Scholar] [CrossRef]
- Badakaya, A.J.; Muhammad, B. A Pursuit Differential Game Problem on a Closed Convex Subset of a Hilbert Space. J. Niger. Soc. Phys. Sci. 2020, 2, 115–119. [Google Scholar] [CrossRef]
- Badakaya, A.; Halliru, A.S.; Jamilu, A.; Ibrahim, K.A. A differential game of pursuit-evasion with constrained players’ energy. Data Anal. Appl. Math. 2022, 3, 42–51. [Google Scholar]
- Adamu, J.; Muangchoo, K.; Badakaya, A.J.; Rilwan, J. On pursuit-evasion differential game problem in a Hilbert space. AIMS Math. 2020, 5, 7467–7479. [Google Scholar] [CrossRef]
- Azimov, A.Y.; Ibragimov, G.; Ibaydullaev, T.; Alias, I.A. Optimal Number of Pursuers in Differential Games on the 1-Skeleton of an Orthoplex. Symmetry 2021, 13, 2170. [Google Scholar] [CrossRef]
- Ruziboev, M.; Ibragimov, G.; Mamayusupov, K.; Khaitmetov, A.; Pansera, B.A. On a Linear Differential Game in the Hilbert Space ℓ2. Mathematics 2023, 11, 4987. [Google Scholar] [CrossRef]
- Folland, G. Real Analysis: Modern Techniques and Applications; John and Wiley Sons: Hoboken, NJ, USA, 1984. [Google Scholar]
- Ibragimov, G.; Kuchkarov, A.S. Fixed Duration Pursuit-Evasion Differential Game with Integral Constraints. J. Phys. Conf. Ser. 2013, 435, 012017. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Umar, B.M.; Rilwan, J.; Aphane, M.; Muangchoo, K. Pursuit and Evasion Linear Differential Game Problems with Generalized Integral Constraints. Symmetry 2024, 16, 513. https://doi.org/10.3390/sym16050513
AMA Style
Umar BM, Rilwan J, Aphane M, Muangchoo K. Pursuit and Evasion Linear Differential Game Problems with Generalized Integral Constraints. Symmetry. 2024; 16(5):513. https://doi.org/10.3390/sym16050513
Chicago/Turabian StyleUmar, Bashir Mai, Jewaidu Rilwan, Maggie Aphane, and Kanikar Muangchoo. 2024. "Pursuit and Evasion Linear Differential Game Problems with Generalized Integral Constraints" Symmetry 16, no. 5: 513. https://doi.org/10.3390/sym16050513
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.