
The Fourth Fundamental Form IV of Dini-Type Helicoidal Hypersurface in the Four Dimensional Euclidean Space


Department of Mathematics, Faculty of Science, Kutlubey Campus, Bartın University, 74100 Bartın, Turkey
Axioms 2021, 10(3), 186; https://doi.org/10.3390/axioms10030186
Submission received: 8 July 2021
/
Revised: 23 July 2021
/
Accepted: 12 August 2021
/
Published: 16 August 2021
(This article belongs to the Special Issue Applications of Differential Geometry II)
{kind=link}
{kind=link}
{kind=link}
Abstract
:We introduce the fourth fundamental form of a Dini-type helicoidal hypersurface in the four dimensional Euclidean space . We find the Gauss map of helicoidal hypersurface in . We obtain the characteristic polynomial of shape operator matrix. Then, we compute the fourth fundamental form matrix IV of the Dini-type helicoidal hypersurface. Moreover, we obtain the Dini-type rotational hypersurface, and reveal its differential geometric objects.
Keywords:
four dimension; Dini-type helicoidal hypersurface; Gauss map; shape operator; curvatures; fourth fundamental formMSC:
Primary: 53A07; Secondary: 53C421. Introduction
Rotational and helicoidal hyper-surfaces have attracted the attention of scientists such as architects, biologists, physicists, mathematicians, and especially geometers for almost 300 years.
Let us review some works about rotational and helicoidal characters in chronological order.
Catenoid is a minimal rotational surface described by Euler [1] in 1744. Helicoid is a ruled minimal surface, described by Euler in 1774 and by Meusnier [2] in 1776. Bour [3] gave isometric deformation formulas of catenoid–helicoid. Dini [4] obtained a helicoidal surface.
Moore [5] introduced rotational surfaces in a four dimensional space . Moore [6] considered rotational surfaces of constant curvature in .
Do Carmo and Dajczer [7] worked on helicoidal surfaces with constant mean curvature . Chen [8] gave submanifolds of a finite type in his books. Hano and Nomizu [9] considered surfaces of revolution with . Roussos [10] studied helicoidal surfaces as Bonnet surfaces. Ripoll [11] introduced helicoidal minimal surfaces in hyperbolic space. Dillen [12] worked on ruled submanifolds of finite type. Baikoussis and Verstraelen [13] focused on the Gauss map of helicoidal surfaces. Hoffman, Wei, and Karcher [14] considered adding handles to the helicoid. Gray [15] gave details of helicoidal–rotational surfaces in his book. Baikoussis and Koufogiorgos [16] obtained helicoidal surfaces with prescribed mean or Gaussian curvature. Dillen and Kühnel [17] examined ruled Weingarten surfaces in Minkowski 3-space.
Ikawa [18] introduced Bour’s theorem and Gauss map. Sasahara [19] worked on spacelike helicoidal surfaces with in a Minkowski 3-space. Ikawa [20] focused on Bour’s theorem in Minkowski geometry. Choi and Kim [21] characterized the helicoid as a ruled surface with pointwise 1-type Gauss map. Yoon [22] studied rotational surfaces with finite type Gauss map in . Beneki, Kaimakamis, and Papantoniou [23] indicated the Minkowski 3-space of helicoidal surfaces. Güler and Vanlı [24] considered Bour’s theorem in Minkowski 3-space. Güler and Vanlı [25] classified the mean, Gaussian, 2nd Gaussian and the 2nd mean curvatures of the helicoidal surfaces with light-like axis in Minkowski 3-space.
Stamatakis and Al-Zoubi [26] considered surfaces of a revolution satisfying Ji and Kim [27] worked on helicoidal CDPC-surfaces in Minkowski 3-space. Ji and Kim [28] introduced mean curvatures and Gauss maps of a pair of isometric helicoidal and rotation surfaces in Minkowski 3-space. Güler, Yaylı, and Hacısalihoğlu [29] used Bour’s theorem on the Gauss map in 3-Euclidean space. Arslan et al. [30] studied rotational embeddings with pointwise 1-type Gauss map in . Dursun and Turgay [31] worked on general rotational surfaces with pointwise 1-type Gauss map in . Arslan et al. [32] focused on generalized rotation surfaces in .
Dursun and Turgay [33] studied minimal and pseudo-umbilical rotational surfaces in Euclidean space . Perdomo [34] provided helicoidal minimal surfaces in . Ji and Kim [35] considered isometries between minimal helicoidal surfaces and rotation surfaces in Minkowski space. Kim and Turgay [36] introduced surfaces with -pointwise 1-type Gauss map in . Kim and Turgay [37] classified helicoidal surfaces with -pointwise 1-type Gauss map. Güler [38] introduced a new type of helicoidal surface of value m. López and Demir [39] worked on helicoidal surfaces in Minkowski space with and . Arslan, Bulca, and Milousheva [40] studied meridian surfaces with pointwise 1-type Gauss map in . Ganchev and Milousheva [41] considered general rotational surfaces in 4-dimensional Minkowski space. Babaarslan and Yaylı [42] gave space-like loxodromes on rotational surfaces in Minkowski 3-space. Güler and Yaylı [43] introduced generalized Bour’s theorem. Senoussi and Bekkar [44] considered helicoidal surfaces with in .
Hoffman, Traizet, and White [45] gave helicoidal minimal surfaces of a prescribed genus. Kim, Kim, and Kim [46] focused on the Cheng-Yau operator and Gauss map of surfaces of revolution. Güler, Magid, and Yaylı [47] focused on the Laplace Beltrami operator of a helicoidal hypersurface in four space. Hieu and Thang [48] considered Bour’s theorem in 4-dimensional Euclidean space. Arslan, Bulca, and Kosova [49] studied generalized rotational surfaces in Euclidean spaces. Babaarslan and Kayacık [50] considered time-like loxodromes on helicoidal surfaces in Minkowski 3-space. Güler, Hacısalihoğlu, and Kim [51] gave the Gauss map and the third Laplace–Beltrami operator of the rotational hypersurface in 4-space. Aleksieva, Milousheva, and Turgay worked on [52] general rotational surfaces in pseudo-Euclidean 4-space with neutral metrics. Goemans [53] introduced flat double rotational surfaces in Euclidean and Lorentz–Minkowski 4-space. Güler and Turgay [54] obtained a Cheng–Yau operator and Gauss map of rotational hypersurfaces in 4-space. Güler and Kişi [55] indicated Dini-type helicoidal hypersurfaces with timelike axis in . Yoon, Lee, and Lee [56] constructed helicoidal surfaces by using curvature functions in isotropic space. Güler [57] worked helical hypersurfaces in .
Dursun [58] introduced rotational Weingarten surfaces in hyperbolic 3-space. Güler [59] focused on the fundamental form and curvature formulas of the hypersphere. López and Pámpano [60] classified rotational surfaces with constant skew curvature in 3-space forms.
In this paper, we study the fourth fundamental form of the Dini-type helicoidal hypersurface in Euclidean 4-space . In Section 2, we offer some basic notions of four-dimensional Euclidean geometry. In Section 3, we define helicoidal hypersurface. In Section 4, we give Dini-type helicoidal hypersurface and calculate the fourth fundamental form. In addition, we provide a conclusion in the last section.
2. Preliminaries
In the rest of this paper, we identify a vector (a,b,c,d) with its transpose (a,b,c,d)
In this section, we will introduce the first, second, third, and fourth fundamental form matrices, matrix of the shape operator S of hypersurface in the four-dimensional Euclidean space .
Let be an isometric immersion of any hypersurface in . Let be the standart base vectors of The inner product of , and the vector product of on are defined as follows
respectively.
In 4-space, the first and the second fundamental form matrices of hypersurface are given as follows
where
and the Gauss map of is defined as follows
Theorem 1.
The shape operator matrix S of any hypersurface in 4-space is given as follows
where
Proof.
We compute and it gives the shape operator matrix S. □
Theorem 2.
The third fundamental form matrix of any hypersurface in 4-space is given as follows
where and
Proof.
We compute and this gives the matrix of the third fundamental form . □
Theorem 3.
Matrix of the fourth fundamental form where the coefficients depends on I and of a hypersurface in 4-space is given as follows
where
Proof.
We compute then it gives the fourth fundamental form matrix . □
3. Helicoidal Hypersurface
Let be a curve in a plane in , and let ℓ be a straight line in for an open interval . A rotational hypersurface in is defined as a hypersurface rotating a curve (i.e., profile curve) around a line (i.e., axis) ℓ. Suppose that when a profile curve rotates around the axis ℓ, it simultaneously displaces parallel lines orthogonal to the axis ℓ, so that the speed of displacement is proportional to the speed of rotation. The resulting hypersurface is called the helicoidal hypersurface with axis ℓ and pitches .
We can suppose that ℓ is the line spanned by the vector . The rotation matrix is given by
where The matrix Q supplies the following equations
When the axis of rotation is ℓ, there is an Euclidean transformation by which the axis is ℓ transformed to the -axis of . Parametrization of the profile curve is given by where is a differentiable function for all . Therefore, the helicoidal hypersurface, spanned by the vector , is given as follows
where We can also write the helicoidal hypersurface as follows
When the pitches helicoidal hypersurface transforms into a rotational hypersurface in .
4. Dini-Type Helicoidal Hypersurface and the Fourth Fundamental Form
Next, for the sake of breviety, we use We consider Dini-type helicoidal hypersurface (see Figure 1) as follows
where and
Using the first differentials of (1) with respect to we get the first quantities
and its determinant
The Gauss map of (1) is given by
where Taking the second differentials of (1) with respect to with (2) we have the second quantities as follows
Computing product matrix we obtain the shape operator matrix of (1) as follows
Theorem 4.
Let : ⟶ be an immersion given by (1). Then, characteristic polynomial of S is given as follows
where
Proof.
Computing , we get and t. □
Corollary 1.
Let : ⟶ be an immersion given by (1). Then, has the following principal curvatures
where
Proof.
Solving characteristic polynomial of we obtain eigenvalues . □
Hence, we can see the curvatures of (1), using the following formulas
easily. See [59] for the formulas of the curvatures .
Corollary 2.
Let : ⟶ be an immersion given by (1). Then, (1) has the third fundamental form matrix as follows
where
Proof.
Using of (1), we have the third fundamental form matrix. □
Corollary 3.
Let : ⟶ be an immersion given by (1). Then, has the fourth fundamental form matrix
where
Proof.
Using product matrix of (1), we get the fourth fundamental form matrix. □
5. Conclusions
In this paper, we introduce the fourth fundamental form of Dini-type helicoidal hypersurface in the four dimensional Euclidean space . We compute its Gauss map . We obtain the characteristic polynomial of shape operator matrix S. We calculate the fourth fundamental form matrix of hypersurface . Taking pitches of helicoidal hypersurface we have a Dini-type rotational hypersurface , and reveal its differential geometric objects. Therefore, it can be seen that objects of and supply the following relation
Funding
This work received no external funding.
Acknowledgments
The author would like to express their sincere thanks to the editor and the reviewers for their helpful comments and suggestions.
Conflicts of Interest
The author declares that no conflict of interest of the paper.
References
- Euler, L. Methodus Inveniendi Lineas Curvas Maximi Minimive Propietate Gaudeates Sive Solutio Problematis Isoperimetrici Latissimo Sensu Accepti; Opera Omnia Citation: Series 1 Original Source Citation; Apud Marcum-Michaelem Bousquet & Socios: Genevæ, Switzerland, 1744; Volume 24, pp. 1–322. [Google Scholar]
- Meusnier, J.B. Memoire sur la courbure des surfaces. Mem. Mathem. Phys. Acad. Sci. Paris, Pres. par Div. Savans 1785, 10, 477–510, Presented in 1776. [Google Scholar]
- Bour, E. Théorie de la déformation des surfaces. J. l.Êcole Imp. Polytech. 1862, 22, 1–148. [Google Scholar]
- Dini, U. Sopra le funzioni di una variabile complessa. Ann. Di Matematica Pura Appl. 1871, 4, 159–174. [Google Scholar] [CrossRef]
- Moore, C. Surfaces of rotation in a space of four dimensions. Ann. Math. 1919, 21, 81–93. [Google Scholar] [CrossRef]
- Moore, C. Rotation surfaces of constant curvature in space of four dimensions. Bull. Amer. Math. Soc. 1920, 26, 454–460. [Google Scholar] [CrossRef] [Green Version]
- Do Carmo, M.; Dajczer, M. Helicoidal surfaces with constant mean curvature. Tohoku Math. J. 1982, 34, 351–367. [Google Scholar] [CrossRef]
- Chen, B.Y. Total Mean Curvature and Submanifolds of Finite Type; World Scientific: Singapore, 1984. [Google Scholar]
- Hano, J.; Nomizu, K. Surfaces of revolution with constant mean curvature. Tohoku Math. J. 1984, 36, 427–437. [Google Scholar] [CrossRef]
- Roussos, I.M. The helicoidal surfaces as Bonnet surfaces. Tohoku Math. J. 1988, 40, 485–490. [Google Scholar] [CrossRef]
- Ripoll, J.B. Helicoidal minimal surfaces in hyperbolic space. Nagoya Math. J. 1989, 114, 65–75. [Google Scholar] [CrossRef] [Green Version]
- Dillen, F. Ruled submanifolds of finite type. Proc. Am. Math. Soc. 1992, 114, 795–798. [Google Scholar] [CrossRef]
- Baikoussis, C.; Verstraelen, L. On the Gauss map of helicoidal surfaces. Rend. Sem. Mat. Messina Ser. II 1993, 2, 31–42. [Google Scholar]
- Hoffman, D.; Wei, F.S.; Karcher, H. Adding handles to the helicoid. Bull. Amer. Math. Soc. 1993, 29, 77–84. [Google Scholar] [CrossRef] [Green Version]
- Gray, A. Modern Differential Geometry of Curves and Surfaces with Mathematica, 2nd ed.; CRC Press: Boca Raton, FL, USA, 1997; pp. 493–495. [Google Scholar]
- Baikoussis, C.; Koufogiorgos, T. Helicoidal surfaces with prescribed mean or Gaussian curvature. J. Geom. 1998, 63, 25–29. [Google Scholar] [CrossRef]
- Dillen, F.; Kühnel, W. Ruled Weingarten surfaces in Minkowski 3-space. Manuscripta Math. 1999, 98, 307–320. [Google Scholar] [CrossRef]
- Ikawa, T. Bour’s theorem and Gauss map. Yokohama Math. J. 2000, 48, 173–180. [Google Scholar]
- Sasahara, N. Spacelike helicoidal surfaces with constant mean curvature in Minkowski 3-space. Tokyo J. Math. 2000, 23, 477–502. [Google Scholar] [CrossRef]
- Ikawa, T. Bour’s theorem in Minkowski geometry. Tokyo J. Math. 2001, 24, 377–394. [Google Scholar] [CrossRef]
- Choi, M.; Kim, Y.H. Characterization of the helicoid as ruled surfaces with pointwise 1-type Gauss map. Bull. Korean Math. Soc. 2001, 38, 753–761. [Google Scholar]
- Yoon, D.W. Rotation surfaces with finite type Gauss map in E4. Indian J. Pure Appl. Math. 2001, 32, 1803–1808. [Google Scholar]
- Beneki, C.C.; Kaimakamis, G.; Papantoniou, B.J. Helicoidal surfaces in three-dimensional Minkowski space. J. Math. Anal. Appl. 2002, 275, 586–614. [Google Scholar] [CrossRef] [Green Version]
- Güler, E.; Vanlı, A. Bour’s theorem in Minkowski 3-space. J. Math. Kyoto 2006, 46, 47–63. [Google Scholar] [CrossRef]
- Güler, E.; Vanlı, A. On the mean, Gauss, the second Gaussian and the second mean curvature of the helicoidal surfaces with light-like axis in . Tsukuba J. Math. 2008, 32, 49–65. [Google Scholar] [CrossRef]
- Stamatakis, S.; Al-Zoubi, H. Surfaces of revolution satisfying ΔIIIx = Ax. J. Geom. Graph. 2010, 14, 181–186. [Google Scholar]
- Ji, F.; Kim, Y.H. Helicoidal CDPC-surfaces in Minkowski 3-space. Int. J. Geom. Methods Mod. Phys. 2010, 7, 979–988. [Google Scholar] [CrossRef]
- Ji, F.; Kim, Y.H. Mean curvatures and Gauss maps of a pair of isometric helicoidal and rotation surfaces in Minkowski 3-space. J. Math. Anal. Appl. 2010, 368, 623–635. [Google Scholar] [CrossRef] [Green Version]
- Güler, E.; Yaylı, Y.; Hacısalihoğlu, H.H. Bour’s theorem on the Gauss map in 3-Euclidean space. Hacet. J. Math. Stat. 2010, 39, 515–525. [Google Scholar]
- Arslan, K.; Kılıç Bayram, B.; Bulca, B.; Kim, Y.H.; Murathan, C.; Öztürk, G. Rotational embeddings in E4 with pointwise 1-type Gauss map. Turk. J. Math. 2011, 35, 493–499. [Google Scholar]
- Dursun, U.; Turgay, N.C. General rotational surfaces in Euclidean space E4 with pointwise 1-type Gauss map. Math. Commun. 2012, 17, 71–81. [Google Scholar]
- Arslan, K.; Bayram, B.; Bulca, B.; Öztürk, G. Generalized rotation surfaces in E4. Results Math. 2012, 61, 315–327. [Google Scholar] [CrossRef]
- Dursun, U.; Turgay, N.C. Minimal and pseudo-umbilical rotational surfaces in Euclidean space E4. Mediterr. J. Math. 2013, 10, 497–506. [Google Scholar] [CrossRef]
- Perdomo, O.M. Helicoidal minimal surfaces in R3. Illinois J. Math. 2013, 57, 87–104. [Google Scholar] [CrossRef]
- Ji, F.; Kim, Y.H. Isometries between minimal helicoidal surfaces and rotation surfaces in Minkowski space. Appl. Math. Comput. 2013, 220, 1–11. [Google Scholar] [CrossRef]
- Kim, Y.H.; Turgay, N.C. Surfaces in E4 with L1-pointwise 1-type Gauss map. Bull. Korean Math. Soc. 2013, 50, 935–949. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.H.; Turgay, N.C. Classifications of helicoidal surfaces with L1-pointwise 1-type Gauss map. Bull. Korean Math. Soc. 2013, 50, 1345–1356. [Google Scholar] [CrossRef] [Green Version]
- Güler, E. A new kind of helicoidal surface of value m. Int. Electron. J. Geom. 2014, 7, 154–162. [Google Scholar] [CrossRef]
- López, R.; Demir, E. Helicoidal surfaces in Minkowski space with constant mean curvature and constant Gauss curvature. Cent. Eur. J. Math. 2014, 12, 1349–1361. [Google Scholar] [CrossRef] [Green Version]
- Arslan, K.; Bulca, B.; Milousheva, V. Meridian surfaces in E4 with pointwise 1-type Gauss map. Bull. Korean Math. Soc. 2014, 51, 911–922. [Google Scholar] [CrossRef] [Green Version]
- Ganchev, G.; Milousheva, V. General rotational surfaces in the 4-dimensional Minkowski space. Turk. J. Math. 2014, 38, 883–895. [Google Scholar] [CrossRef] [Green Version]
- Babaarslan, M.; Yaylı, Y. Space-like loxodromes on rotational surfaces in Minkowski 3-space. J. Math. Anal. Appl. 2014, 409, 288–298. [Google Scholar] [CrossRef]
- Güler, E.; Yaylı, Y. Generalized Bour’s theorem. Kuwait J. Sci. 2015, 42, 79–90. [Google Scholar]
- Senoussi, B.; Bekkar, M. Helicoidal surfaces with ΔJr=Ar in 3-dimensional Euclidean space. Stud. Univ. Babeş-Bolyai Math. 2015, 60, 437–448. [Google Scholar]
- Hoffman, D.; Traizet, M.; White, B. Helicoidal minimal surfaces of prescribed genus. Acta Math. 2016, 216, 217–323. [Google Scholar] [CrossRef]
- Kim, D.S.; Kim, J.R.; Kim, Y.H. Cheng-Yau operator and Gauss map of surfaces of revolution. Bull. Malays. Math. Sci. Soc. 2016, 39, 1319–1327. [Google Scholar] [CrossRef] [Green Version]
- Güler, E.; Magid, M.; Yaylı, Y. Laplace Beltrami operator of a helicoidal hypersurface in four space. J. Geom. Symmetry Phys. 2016, 41, 77–95. [Google Scholar] [CrossRef] [Green Version]
- Hieu, D.T.; Thang, N.N. Bour’s theorem in 4-dimensional Euclidean space. Bull. Korean Math. Soc. 2017, 54, 2081–2089. [Google Scholar]
- Arslan, K.; Bulca, B.; Kosova, D. On generalized rotational surfaces in Euclidean spaces. J. Korean Math. Soc. 2017, 54, 999–1013. [Google Scholar] [CrossRef] [Green Version]
- Babaarslan, M.; Kayacık, M. Time-like loxodromes on helicoidal surfaces in Minkowski 3-space. Filomat 2017, 31, 4405–4414. [Google Scholar] [CrossRef]
- Güler, E.; Hacısalihoğlu, H.H.; Kim, Y.H. The Gauss map and the third Laplace-Beltrami operator of the rotational hypersurface in 4-space. Symmetry 2018, 10, 398. [Google Scholar] [CrossRef] [Green Version]
- Aleksieva, Y.; Milousheva, V.; Turgay, N.C. General rotational surfaces in pseudo-Euclidean 4-space with neutral metric. Bull. Malays. Math. Sci. Soc. 2018, 41, 1773–1793. [Google Scholar] [CrossRef] [Green Version]
- Goemans, W. Flat double rotational surfaces in Euclidean and Lorentz-Minkowski 4-space. Publ. Inst. Math. 2018, 103, 61–68. [Google Scholar] [CrossRef]
- Güler, E.; Turgay, N.C. Cheng-Yau operator and Gauss map of rotational hypersurfaces in 4-space. Mediterr. J. Math. 2019, 16, 1–16. [Google Scholar] [CrossRef]
- Güler, E.; Kişi, Ö. Dini-type helicoidal hypersurfaces with timelike axis in Minkowski 4-space . Mathematics 2019, 7, 205. [Google Scholar] [CrossRef] [Green Version]
- Yoon, D.W.; Lee, J.W.; Lee, C.W. Constructions of helicoidal surfaces by using curvature functions in isotropic space. Hacet. J. Math. Stat. 2019, 48, 959–965. [Google Scholar] [CrossRef]
- Güler, E. Helical hypersurfaces in Minkowski geometry . Symmetry 2020, 12, 1206. [Google Scholar] [CrossRef]
- Dursun, U. Rotational Weingarten surfaces in hyperbolic 3-space. J. Geom. 2020, 111, 1–12. [Google Scholar] [CrossRef]
- Güler, E. Fundamental form IV and curvature formulas of the hypersphere. Malaya J. Mat. 2020, 8, 2008–2011. [Google Scholar] [CrossRef]
- López, R.; Pámpano, Á. Classification of rotational surfaces with constant skew curvature in 3-space forms. J. Math. Anal. Appl. 2020, 489, 1–19. [Google Scholar] [CrossRef]
Figure 1.
Projections of Dini-type hypersurface into (Left) space, (Right) space.
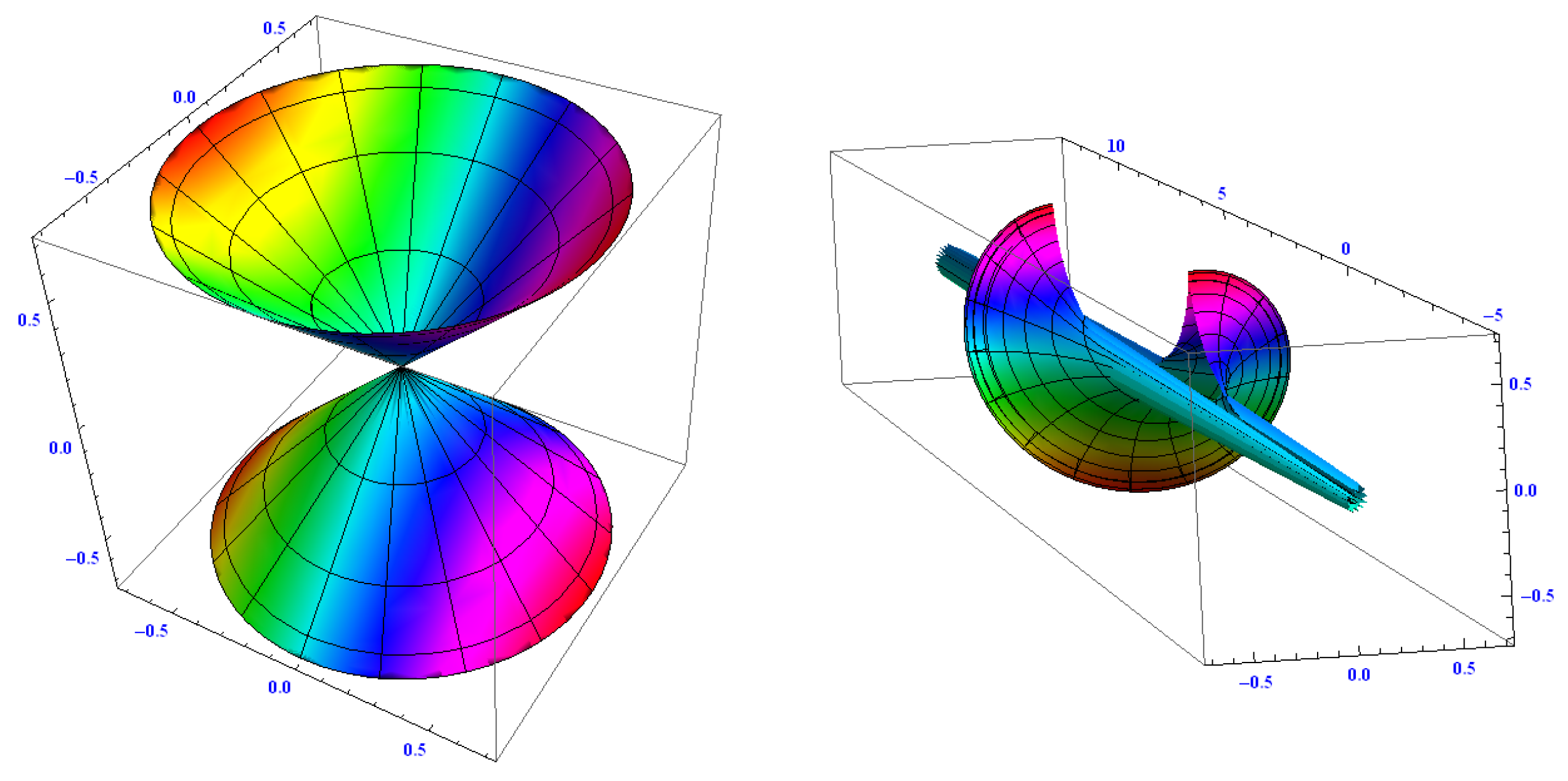
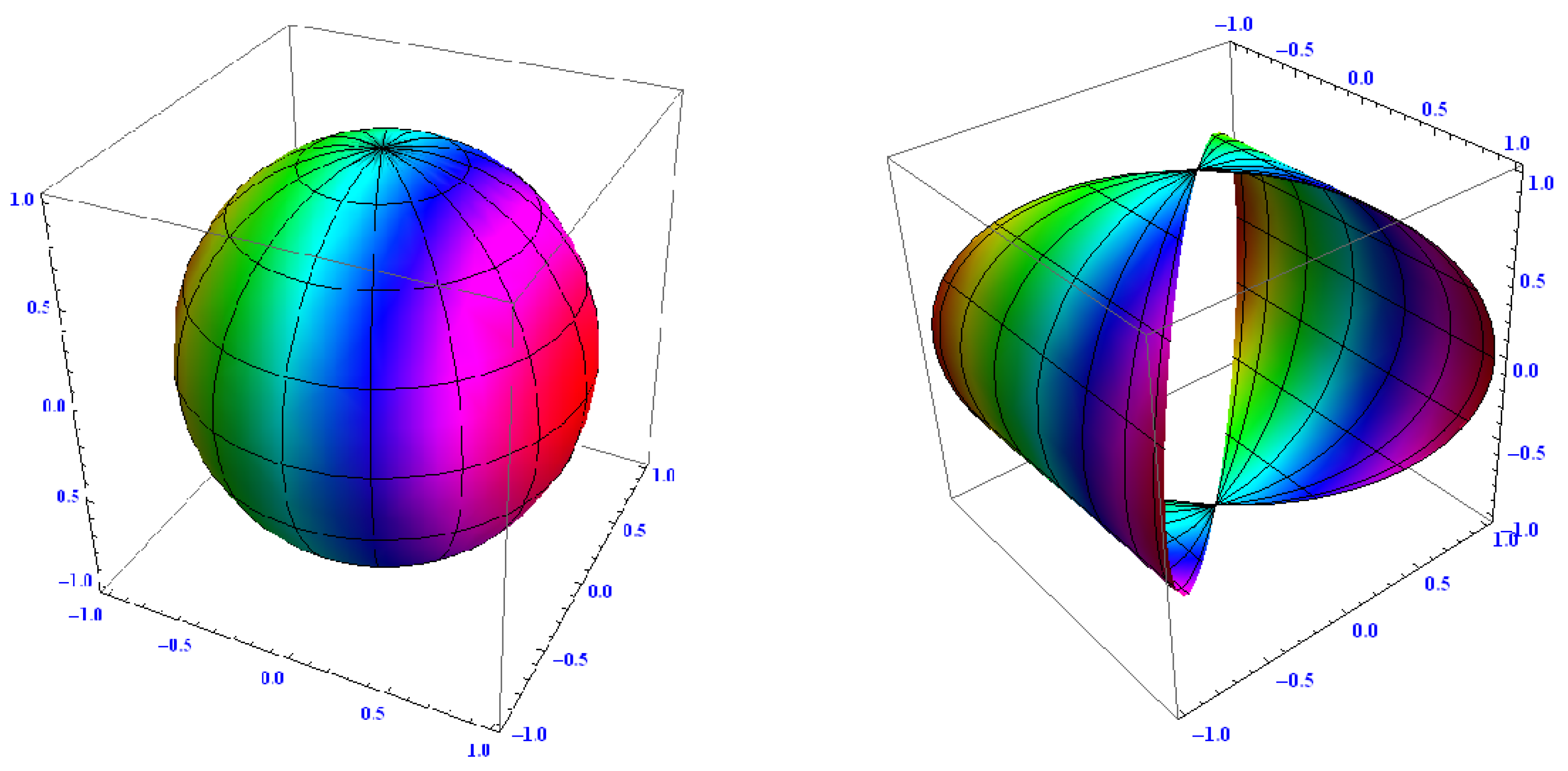
Figure 2.
Projections of into (Left) space, (Right) space.

Figure 3.
Projections of of into (Left) space, (Right) space.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Güler, E. The Fourth Fundamental Form IV of Dini-Type Helicoidal Hypersurface in the Four Dimensional Euclidean Space. Axioms 2021, 10, 186. https://doi.org/10.3390/axioms10030186
AMA Style
Güler E. The Fourth Fundamental Form IV of Dini-Type Helicoidal Hypersurface in the Four Dimensional Euclidean Space. Axioms. 2021; 10(3):186. https://doi.org/10.3390/axioms10030186
Chicago/Turabian StyleGüler, Erhan. 2021. "The Fourth Fundamental Form IV of Dini-Type Helicoidal Hypersurface in the Four Dimensional Euclidean Space" Axioms 10, no. 3: 186. https://doi.org/10.3390/axioms10030186
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.