
Exact Formulation for the Curvature of Gothic Arch Ball Screw Profiles and New Approximated Solution Based on Simplified Groove Geometry

Abstract
:1. Introduction
2. Materials and Methods
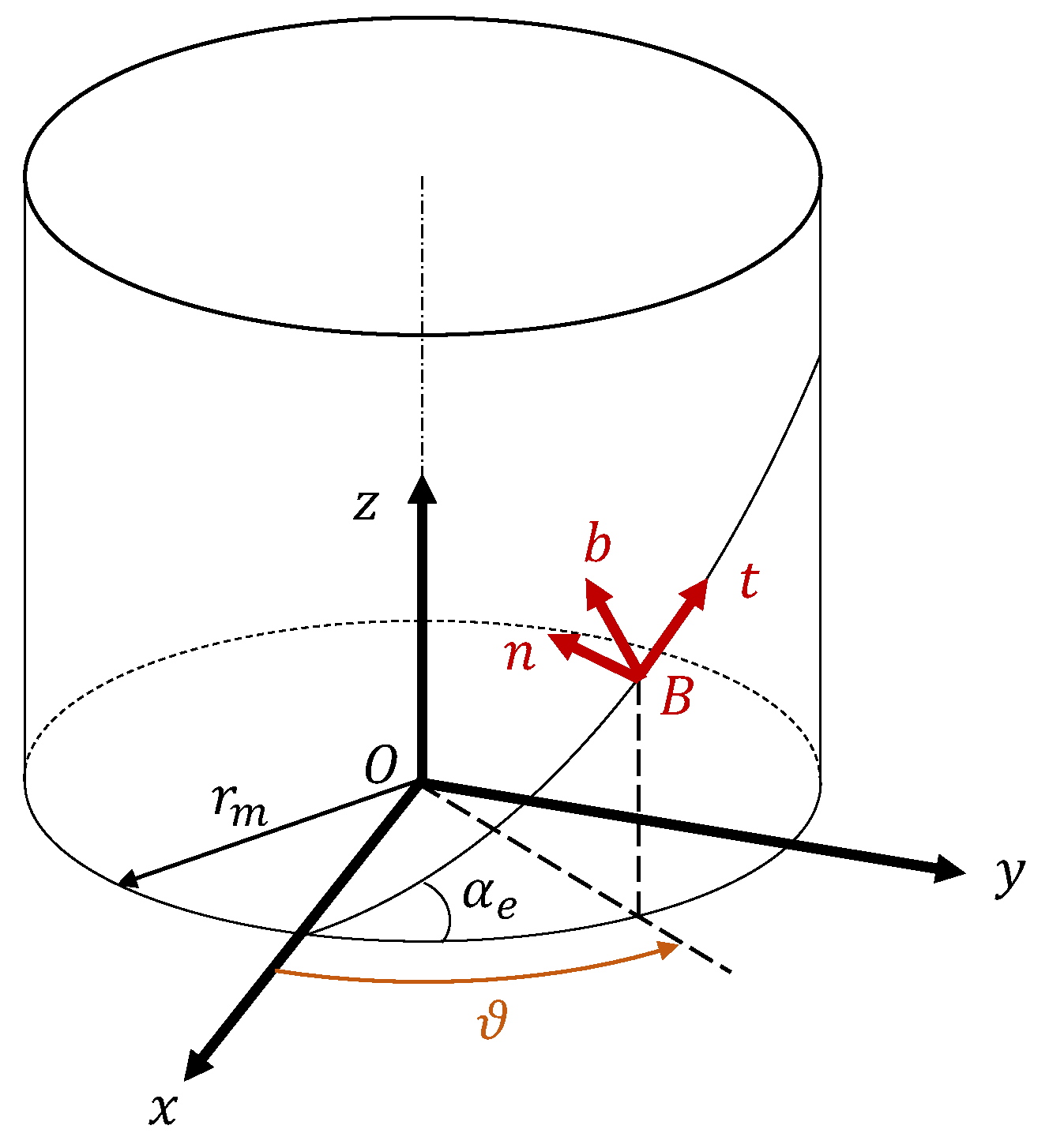
2.1. Groove Geometry of Ball Screws
- is the screw shaft CS, with the z axis aligned along the screw shaft axis;
- is the Frenet–Serret CS, whose centre B is located on the helix, with the t axis tangent to it, the n axis directed perpendicularly toward the screw shaft axis z and the b axis perpendicular to t and n axes to create a right-handed CS. The origin B of this CS identifies the ideal position of the centre of the sphere, and its location, with regards to the screw shaft’s CS , is defined by the azimuth angle .
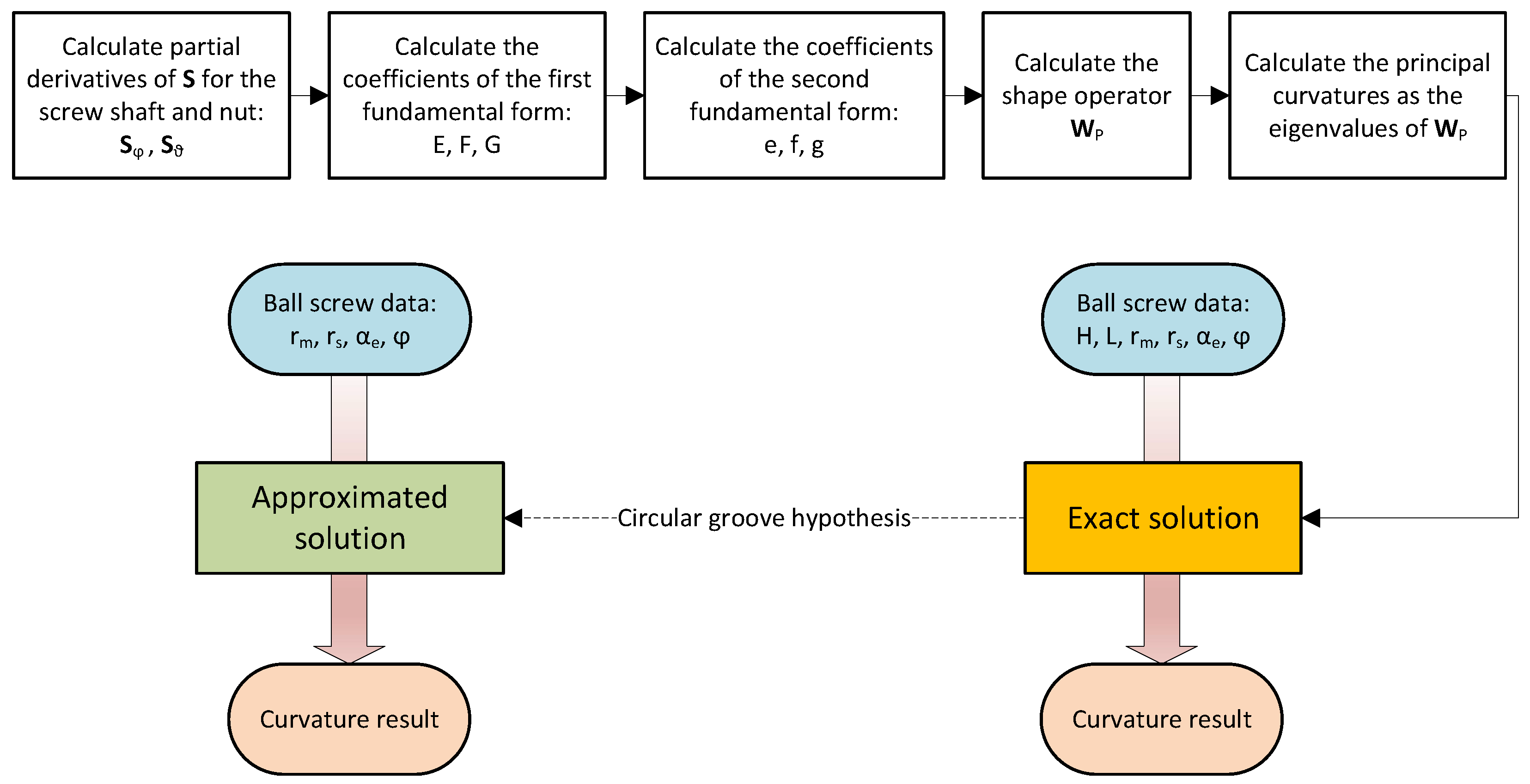
2.2. Exact Curvature Calculation
2.3. Approximated Formulation Assuming a Circular Groove Profile
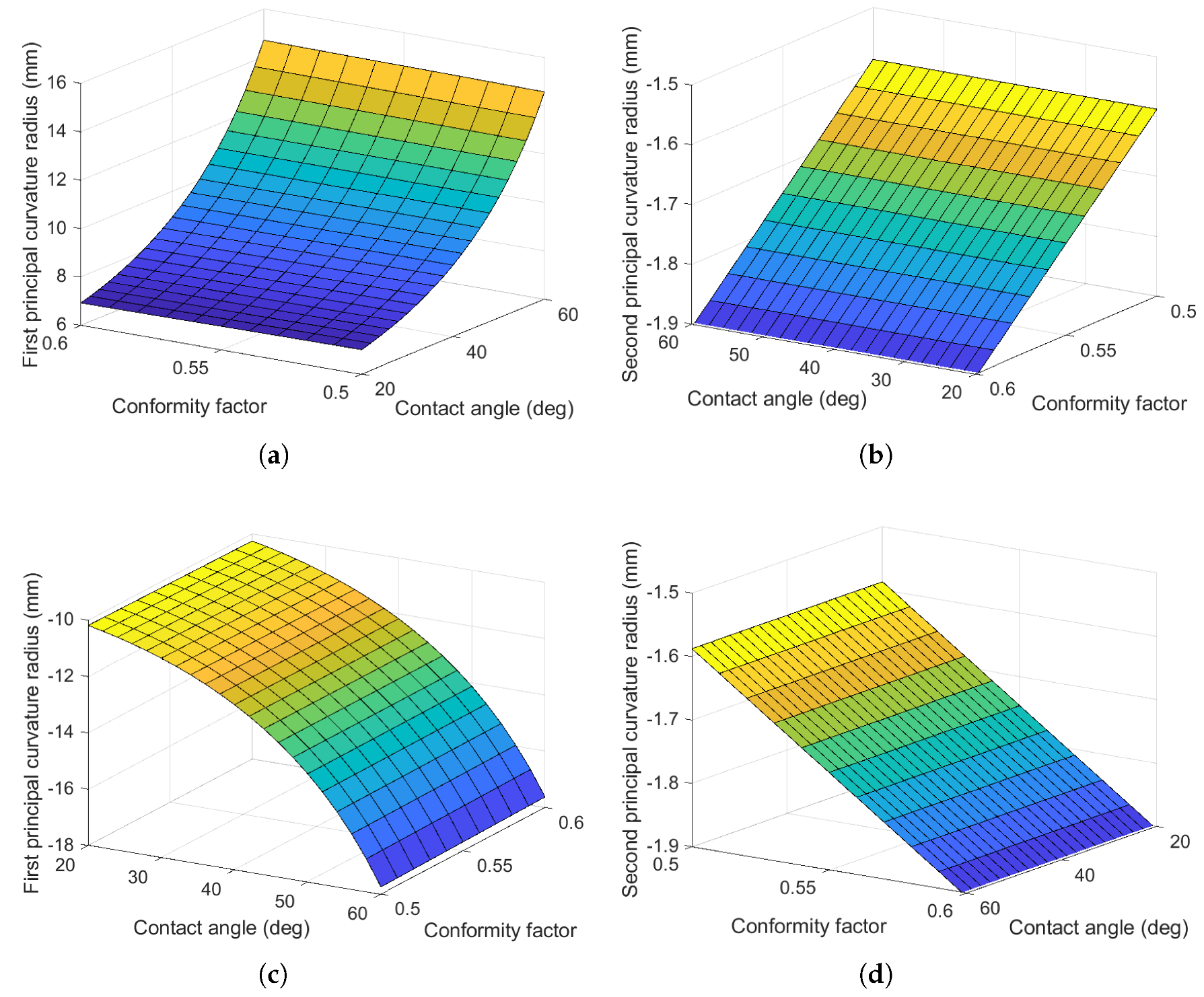
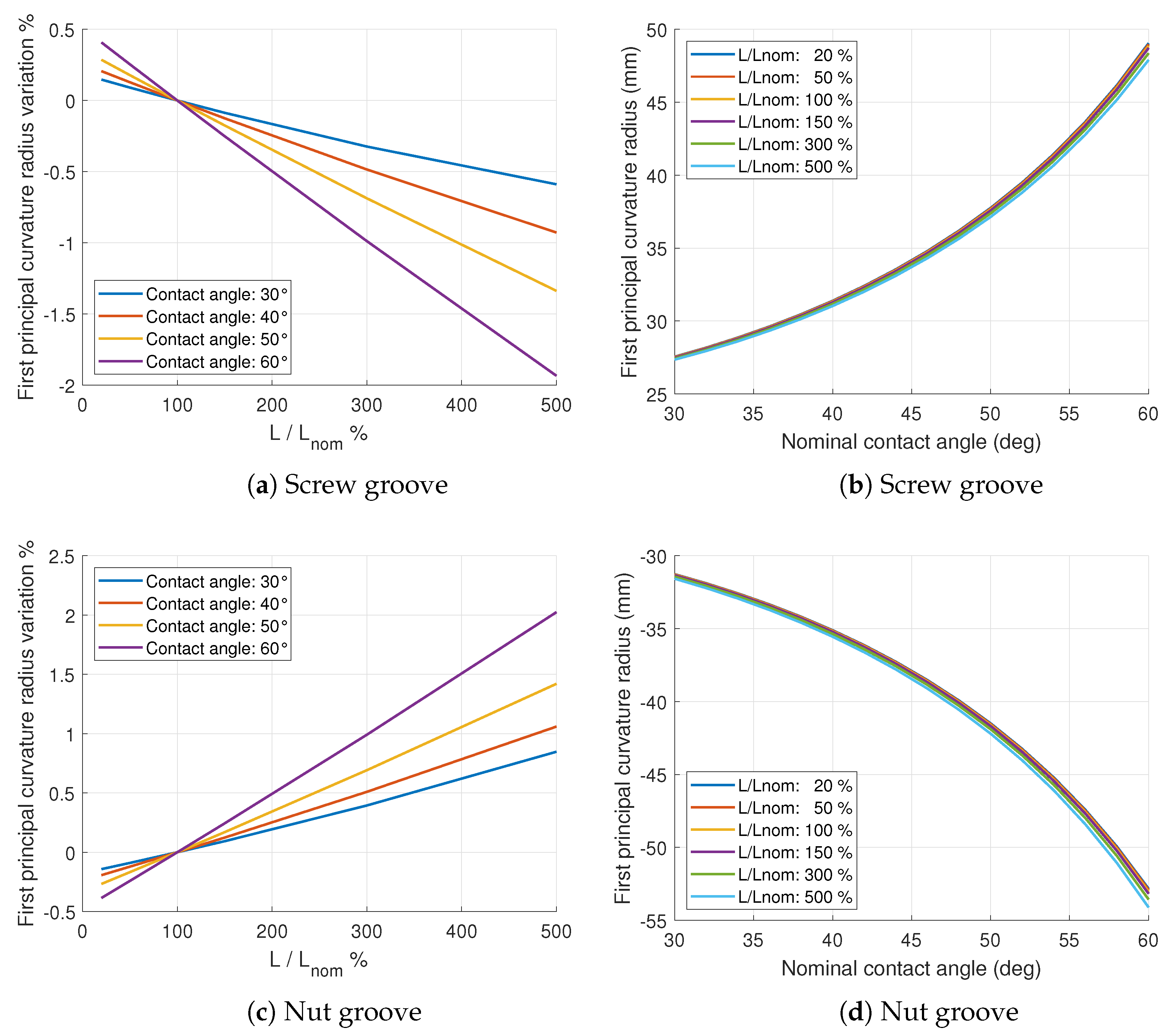
3. Results and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Curvature Radius Errors for Commercial Ball Screw Sizes

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
(mm) | Lead (mm) | (mm) | (deg) | Lit. ave./max. err. (%) | Proposed ave./max. err. (%) |
|---|---|---|---|---|---|
| 125 | 10 | 7.144 | 1.46 | 0.30/0.31 | 0.24/0.24 |
| 160 | 25 | 12.7 | 2.85 | 0.60/0.61 | 0.33/0.34 |
| 125 | 20 | 12.7 | 2.92 | 0.71/0.73 | 0.43/0.45 |
| 160 | 30 | 12.7 | 3.42 | 0.71/0.73 | 0.33/0.34 |
| 125 | 25 | 12.7 | 3.64 | 0.87/0.89 | 0.43/0.44 |
| 125 | 30 | 12.7 | 4.37 | 1.06/1.09 | 0.43/0.44 |
| 100 | 30 | 12.7 | 5.45 | 1.54/1.60 | 0.54/0.57 |
| 80 | 25 | 12.7 | 5.68 | 1.81/1.90 | 0.70/0.73 |
| 125 | 40 | 12.7 | 5.82 | 1.54/1.58 | 0.42/0.44 |
| 80 | 30 | 9.525 | 6.81 | 2.04/2.12 | 0.50/0.52 |
| 63 | 25 | 9.525 | 7.20 | 2.42/2.53 | 0.65/0.68 |
| 50 | 20 | 6.35 | 7.26 | 2.30/2.39 | 0.53/0.56 |
| 100 | 40 | 12.7 | 7.26 | 2.30/2.39 | 0.53/0.56 |
| 32 | 15 | 6.35 | 8.49 | 3.43/3.65 | 0.87/0.94 |
| 50 | 25 | 6.35 | 9.04 | 3.25/3.37 | 0.52/0.55 |
| 32 | 20 | 6.35 | 11.25 | 5.30/5.63 | 0.82/0.90 |
| 80 | 60 | 9.525 | 13.43 | 6.35/6.57 | 0.44/0.47 |
| 25 | 20 | 3.5 | 14.29 | 7.29/7.59 | 0.51/0.56 |
| 40 | 40 | 6.35 | 17.66 | 10.89/11.39 | 0.52/0.60 |
| 32 | 32 | 4.762 | 17.66 | 10.77/11.23 | 0.49/0.56 |
| 50 | 60 | 6.35 | 20.91 | 14.29/14.78 | 0.35/0.42 |
| 32 | 40 | 4.762 | 21.70 | 15.60/16.23 | 0.40/0.49 |
| 63 | 80 | 7.144 | 22.01 | 15.50/15.96 | 0.29/0.36 |
| 40 | 60 | 6.35 | 25.52 | 21.01/21.86 | 0.33/0.45 |
| 40 | 60 | 7.144 | 25.52 | 21.36/22.34 | 0.38/0.52 |
| 25 | 50 | 3.5 | 32.48 | 31.45/32.41 | 0.14/0.26 |
| 32 | 64 | 4.762 | 32.48 | 31.63/32.66 | 0.15/0.28 |
| 50 | 100 | 7.144 | 32.48 | 31.51/32.49 | 0.14/0.27 |
| 20 | 50 | 3.5 | 38.51 | 42.42/43.82 | 0.15/0.54 |
| 20 | 65 | 3.5 | 43.68 | 51.39/52.81 | 0.27/0.84 |
| 25 | 80 | 3.5 | 45.53 | 53.80/54.90 | 0.27/0.76 |
(mm) | Lead (mm) | (mm) | (deg) | Lit. ave./max. err. (%) | Proposed ave./max. err. (%) |
|---|---|---|---|---|---|
| 125 | 10 | 7.144 | 1.46 | 0.09/0.15 | 0.22/0.22 |
| 160 | 25 | 12.7 | 2.85 | 0.26/0.35 | 0.29/0.30 |
| 125 | 20 | 12.7 | 2.92 | 0.27/0.39 | 0.37/0.38 |
| 160 | 30 | 12.7 | 3.42 | 0.36/0.45 | 0.29/0.30 |
| 125 | 25 | 12.7 | 3.64 | 0.41/0.52 | 0.37/0.38 |
| 125 | 30 | 12.7 | 4.37 | 0.57/0.68 | 0.37/0.38 |
| 100 | 30 | 12.7 | 5.45 | 0.87/0.99 | 0.45/0.46 |
| 80 | 25 | 12.7 | 5.68 | 0.93/1.07 | 0.55/0.57 |
| 125 | 40 | 12.7 | 5.82 | 0.99/1.09 | 0.36/0.37 |
| 80 | 30 | 9.525 | 6.81 | 1.33/1.43 | 0.41/0.42 |
| 63 | 25 | 9.525 | 7.20 | 1.47/1.58 | 0.51/0.53 |
| 50 | 20 | 6.35 | 7.26 | 1.50/1.60 | 0.44/0.45 |
| 100 | 40 | 12.7 | 7.26 | 1.50/1.60 | 0.44/0.45 |
| 32 | 15 | 6.35 | 8.49 | 1.97/2.10 | 0.64/0.66 |
| 50 | 25 | 6.35 | 9.04 | 2.31/2.39 | 0.43/0.43 |
| 32 | 20 | 6.35 | 11.25 | 3.42/3.48 | 0.61/0.61 |
| 80 | 60 | 9.525 | 13.43 | 5.04/5.07 | 0.37/0.38 |
| 25 | 20 | 3.5 | 14.29 | 5.63/5.71 | 0.41/0.43 |
| 40 | 40 | 6.35 | 17.66 | 8.42/8.71 | 0.41/0.45 |
| 32 | 32 | 4.762 | 17.66 | 8.46/8.74 | 0.39/0.42 |
| 50 | 60 | 6.35 | 20.91 | 11.87/12.29 | 0.29/0.34 |
| 32 | 40 | 4.762 | 21.70 | 12.61/13.14 | 0.32/0.38 |
| 63 | 80 | 7.144 | 22.01 | 13.20/13.63 | 0.25/0.29 |
| 40 | 60 | 6.35 | 25.52 | 17.11/17.94 | 0.26/0.35 |
| 40 | 60 | 7.144 | 25.52 | 16.94/17.87 | 0.29/0.38 |
| 25 | 50 | 3.5 | 32.48 | 27.04/28.19 | 0.12/0.23 |
| 32 | 64 | 4.762 | 32.48 | 26.94/28.15 | 0.13/0.25 |
| 50 | 100 | 7.144 | 32.48 | 27.01/28.17 | 0.12/0.23 |
| 20 | 50 | 3.5 | 38.51 | 36.18/37.91 | 0.15/0.62 |
| 20 | 65 | 3.5 | 43.68 | 44.93/46.83 | 0.26/0.91 |
| 25 | 80 | 3.5 | 45.53 | 48.66/50.22 | 0.26/0.81 |
Appendix B. Exact Curvature Equations of Gothic Arch Grooves
References
- Simizu, S.; Sakato, K. Present Condition and Expectation for Ultra-precise Positioning Techniques from a Questionnaire. J. Jpn. Soc. Precis. Eng. 1995, 61, 1650–1655. [Google Scholar]
- Altintas, Y.; Verl, A.; Brecher, C.; Uriarte, L.; Pritschow, G. Machine tool feed drives. CIRP Ann.—Manuf. Technol. 2011, 60, 779–796. [Google Scholar] [CrossRef]
- Bertolaso, R.; Cheikh, M.; Barranger, Y.; Dupré, J.C.; Germaneau, A.; Doumalin, P. Experimental and numerical study of the load distribution in a ball-screw system. J. Mech. Sci. Technol. 2014, 28, 1411–1420. [Google Scholar] [CrossRef]
- Chen, C.J.; Jywe, W.; Liu, Y.C.; Jwo, H.H. The development of using the digital projection method to measure the contact angle of ball screw. Phys. Procedia 2011, 19, 36–42. [Google Scholar] [CrossRef]
- Levit, G. Recirculating ball screw and nut units. Mach. Tool. 1963, 34, 3–8. [Google Scholar]
- Lin, M.C.; Ravani, B.; Velinsky, S.A. Kinematics of the Ball Screw Mechanism. J. Mech. Des. 1994, 116, 849–855. [Google Scholar]
- Lin, M.C.; Velinsky, S.A.; Ravani, B. Design of the Ball Screw Mechanism for Optimal Efficiency. J. Mech. Des. 1994, 116, 856–861. [Google Scholar] [CrossRef]
- Wei, C.C.; Lin, J.F. Kinematic Analysis of the Ball Screw Mechanism Considering Variable Contact Angles and Elastic Deformations. J. Mech. Des. 2003, 125, 717–733. [Google Scholar] [CrossRef]
- Wei, C.C.; Lin, J.F.; Horng, J.H. Analysis of a ball screw with a preload and lubrication. Tribol. Int. 2009, 42, 1816–1831. [Google Scholar] [CrossRef]
- Wei, C.C.; Lai, R.S. Kinematical analyses and transmission efficiency of a preloaded ball screw operating at high rotational speeds. Mech. Mach. Theory 2011, 46, 880–898. [Google Scholar] [CrossRef]
- Xu, N.; Tang, W. Modeling and Analyzing the Slipping of the Ball Screw. Lat. Am. J. Solids Struct. 2015, 12, 612–623. [Google Scholar] [CrossRef]
- Verl, A.; Frey, S. Correlation between feed velocity and preloading in ball screw drives. CIRP Ann.—Manuf. Technol. 2010, 59, 429–432. [Google Scholar] [CrossRef]
- Zhou, C.G.; Feng, H.T.; Chen, Z.T.; Ou, Y. Correlation between preload and no-load drag torque of ball screws. Int. J. Mach. Tools Manuf. 2016, 102, 35–40. [Google Scholar] [CrossRef]
- Bertolino, A.C.; Jacazio, G.; Mauro, S.; Sorli, M. Investigation on the ball screws no-load drag torque in presence of lubrication through MBD simulations. Mech. Mach. Theory 2021, 161, 104328. [Google Scholar] [CrossRef]
- Cuttino, J.F.; Dow, T.A.; Knight, B.F. Analytical and Experimental Identification of Nonlinearities in a Single-Nut, Preloaded Ball Screw. J. Mech. Des. 1997, 119, 15. [Google Scholar] [CrossRef]
- Kamalzadeh, A.; Gordon, D.J.; Erkorkmaz, K. Robust compensation of elastic deformations in ball screw drives. Int. J. Mach. Tools Manuf. 2010, 50, 559–574. [Google Scholar] [CrossRef]
- Fukada, S.; Fang, B.; Shigeno, A. Experimental analysis and simulation of nonlinear microscopic behavior of ball screw mechanism for ultra-precision positioning. Precis. Eng. 2011, 35, 650–668. [Google Scholar] [CrossRef]
- Horejs, O. Thermo-Mechanical Model of Ball Screw With Non-Steady Heat Sources. In Proceedings of the 2007 International Conference on Thermal Issues in Emerging Technologies: Theory and Application, Cairo, Egypt, 3–6 January 2007; pp. 133–137. [Google Scholar] [CrossRef]
- Mauro, S.; Pastorelli, S.; Johnston, E. Influence of controller parameters on the life of ball screw feed drives. Adv. Mech. Eng. 2015, 7, 1–11. [Google Scholar] [CrossRef]
- Mei, X.; Tsutsumi, M.; Tao, T.; Sun, N. Study on the load distribution of ball screws with errors. Mech. Mach. Theory 2003, 38, 1257–1269. [Google Scholar] [CrossRef]
- Xu, S.; Yao, Z.; Sun, Y.; Shen, H. Load Distribution of Ball Screw with Consideration of Contact Angle Variation and Geometry Errors. In Proceedings of the IMECE2014, Montreal, Quebec, Canada, 14–20 November 2014; ASME: Montreal, QC, Canada, 2014; pp. 1–7, Volume 2B: Advanced Manufacturing. [Google Scholar] [CrossRef]
- Okwudire, C.E. Reduction of torque-induced bending vibrations in ball screw-driven machines via optimal design of the nut. J. Mech. Des. Trans. ASME 2012, 134, 111008. [Google Scholar] [CrossRef]
- Lin, B.; Okwudire, C.E. Low-Order Contact Load Distribution Model for Ball Nut Assemblies. SAE Int. J. Passeng. Cars—Mech. Syst. 2016, 9, 535–540. [Google Scholar] [CrossRef]
- Oyanguren, A.; Larrañaga, J.; Ulacia, I. Thermo-mechanical modelling of ball screw preload force variation in different working conditions. Int. J. Adv. Manuf. Technol. 2018, 97, 723–739. [Google Scholar] [CrossRef]
- Wen, J.; Gao, H.; Liu, Q.; Hong, X.; Sun, Y. A new method for identifying the ball screw degradation level based on the multiple classifier system. Meas. J. Int. Meas. Confed. 2018, 130, 118–127. [Google Scholar] [CrossRef]
- Garinei, A.; Marsili, R. A new diagnostic technique for ball screw actuators. Meas. J. Int. Meas. Confed. 2012, 45, 819–828. [Google Scholar] [CrossRef]
- Li, P.; Jia, X.; Feng, J.; Davari, H.; Qiao, G.; Hwang, Y.; Lee, J. Prognosability study of ball screw degradation using systematic methodology. Mech. Syst. Signal Process. 2018, 109, 45–57. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Ro, S.K.; Park, J.K. Study of ball screw system preload monitoring during operation based on the motor current and screw-nut vibration. Mech. Syst. Signal Process. 2019, 131, 18–32. [Google Scholar] [CrossRef]
- Wei, C.C.; Liou, W.L.; Lai, R.S. Wear analysis of the offset type preloaded ball-screw operating at high speed. Wear 2012, 292–293, 111–123. [Google Scholar] [CrossRef]
- Zhou, C.G.; Ou, Y.; Feng, H.T.; Chen, Z.T. Investigation of the precision loss for ball screw raceway based on the modified Archard theory. Ind. Lubr. Tribol. 2017, 69, 166–173. [Google Scholar] [CrossRef]
- Bertolino, A.C.; De Martin, A.; Fasiello, F.; Mauro, S.; Sorli, M. A simulation study on the effect of lubricant ageing on ball screws behaviour. In Proceedings of the International Conference on Electrical, Computer, Communications and Mechatronics Engineering, ICECCME, Male, Maldives, 16–18 November 2022. [Google Scholar]
- Liu, J.; Ma, C.; Wang, S. Precision loss modeling method of ball screw pair. Mech. Syst. Signal Process. 2020, 135, 106397. [Google Scholar] [CrossRef]
- Braccesi, C.; Landi, L. A general elastic-plastic approach to impact analisys for stress state limit evaluation in ball screw bearings return system. Int. J. Impact Eng. 2007, 34, 1272–1285. [Google Scholar] [CrossRef]
- Zhao, J.; Lin, M.; Song, X.; Jiang, H. Research on the precision loss of ball screw with short-time overload impact. Adv. Mech. Eng. 2018, 10, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Bertolino, A.C.; De Martin, A.; Mauro, S.; Sorli, M. Multibody dynamic ADAMS model of a ball screw mechanism with recirculation channel. In Proceedings of the IMECE, Virtual, 1–6 November 2021; pp. 1–10. [Google Scholar]
- Bertolino, A.C.; Mauro, S.; Jacazio, G.; Sorli, M. Multibody Dynamic Model of a Double Nut Preloaded Ball Screw Mechanism With Lubrication. In Proceedings of the Volume 7B: Dynamics, Vibration, and Control; American Society of Mechanical Engineers: Portland, OR, USA, 2020; pp. 1–11. [Google Scholar] [CrossRef]
- Bertolino, A.C.; Jacazio, G.; Mauro, S.; Sorli, M. Developing of a Simscape Multibody Contact Library for Gothic Arc Ball Screws: A Three-Dimensional Model for Internal Sphere/Grooves Interactions. In Proceedings of the IMECE, Salt Lake City, UT, USA, 11–14 November 2019; ASME, Ed.; American Society of Mechanical Engineers: Salt Lake City, UT, USA, 2019; pp. 1–8, Volume 4: Dynamics, Vibration, and Control. [Google Scholar] [CrossRef]
- Bertolino, A.C.; De Martin, A.; Jacazio, G.; Sorli, M. A technological demonstrator for the application of PHM techniques to electro-mechanical flight control actuators. In Proceedings of the 2022 IEEE International Conference on Prognostics and Health Management (ICPHM), Detroit (Romulus), MI, USA, 6–8 June 2022; pp. 70–76. [Google Scholar] [CrossRef]
- Bertolino, A.C.; De Martin, A.; Jacazio, G.; Mauro, S.; Sorli, M. Robust Design of a Test Bench for PHM Study of Ball Screw Drives. In Proceedings of the IMECE, Salt Lake City, UT, USA, 11–14 November 2019; ASME, Ed.; American Society of Mechanical Engineers: Salt Lake City, UT, USA, 2019; pp. 1–9, Volume 1: Advances in Aerospace Technology. [Google Scholar] [CrossRef]
- Bertolino, A.C.; De Martin, A.; Gaidano, M.; Mauro, S.; Sorli, M. A fully sensorized test bench for prognostic activities on ball screws. In Proceedings of the 2021 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Port Louis, Mauritius, 7–8 October 2021; pp. 7–8. [Google Scholar] [CrossRef]
- ISO 3408-1:2006; Ball Screws—Part 5: Static and Dynamic Axial Load Ratings and Operational Life. ISO: Geneva, Switzerland, 2006.
- Meusnier, J. Mém. prés. par div. Etrangers. Acad. Sci. Paris 1785, 10, 477–510. [Google Scholar]
- do Carmo, M.P. Differential Geometry of Curves and Surfaces, 2nd ed.; Dover Publications Inc.: Mineola, NY, USA, 2016. [Google Scholar]
- Spivak, M. A Comprehensive Introduction to Differential Geometry, 3rd ed.; Publish or Perish Inc.: Houston, TX, USA, 1999; Volume 1. [Google Scholar]
- MOOG. Ball Screws and Planetary Roller Screws; MOOG: Asheville, NC, USA, 2014. [Google Scholar]
- NSK Corporation. Ball Screw Catalogue; NSK Corporation: Tokyo, Japan, 2021. [Google Scholar]
- KSS. Ball Screws Catalogue; KSS: Tokyo, Japan, 2021. [Google Scholar]
- Hiwin Corp. Ball Screws Catalogue; Hiwin Corp.: Taichung City, Taiwan, 2020. [Google Scholar]
- Umbra Group. Industrial Ballscrews Catalogue; Umbra Group: Foligno, Italy, 2021. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bertolino, A.C.; De Martin, A.; Mauro, S.; Sorli, M. Exact Formulation for the Curvature of Gothic Arch Ball Screw Profiles and New Approximated Solution Based on Simplified Groove Geometry. Machines 2023, 11, 261. https://doi.org/10.3390/machines11020261
Bertolino AC, De Martin A, Mauro S, Sorli M. Exact Formulation for the Curvature of Gothic Arch Ball Screw Profiles and New Approximated Solution Based on Simplified Groove Geometry. Machines. 2023; 11(2):261. https://doi.org/10.3390/machines11020261
Chicago/Turabian StyleBertolino, Antonio Carlo, Andrea De Martin, Stefano Mauro, and Massimo Sorli. 2023. "Exact Formulation for the Curvature of Gothic Arch Ball Screw Profiles and New Approximated Solution Based on Simplified Groove Geometry" Machines 11, no. 2: 261. https://doi.org/10.3390/machines11020261