
Decentralized Adaptive Quantized Dynamic Surface Control for a Class of Flexible Hypersonic Flight Vehicles with Input Quantization

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. HFA Mathematical Model and Preliminaries
2.1. HFA Dynamic Model
2.2. RBF Neural Networks
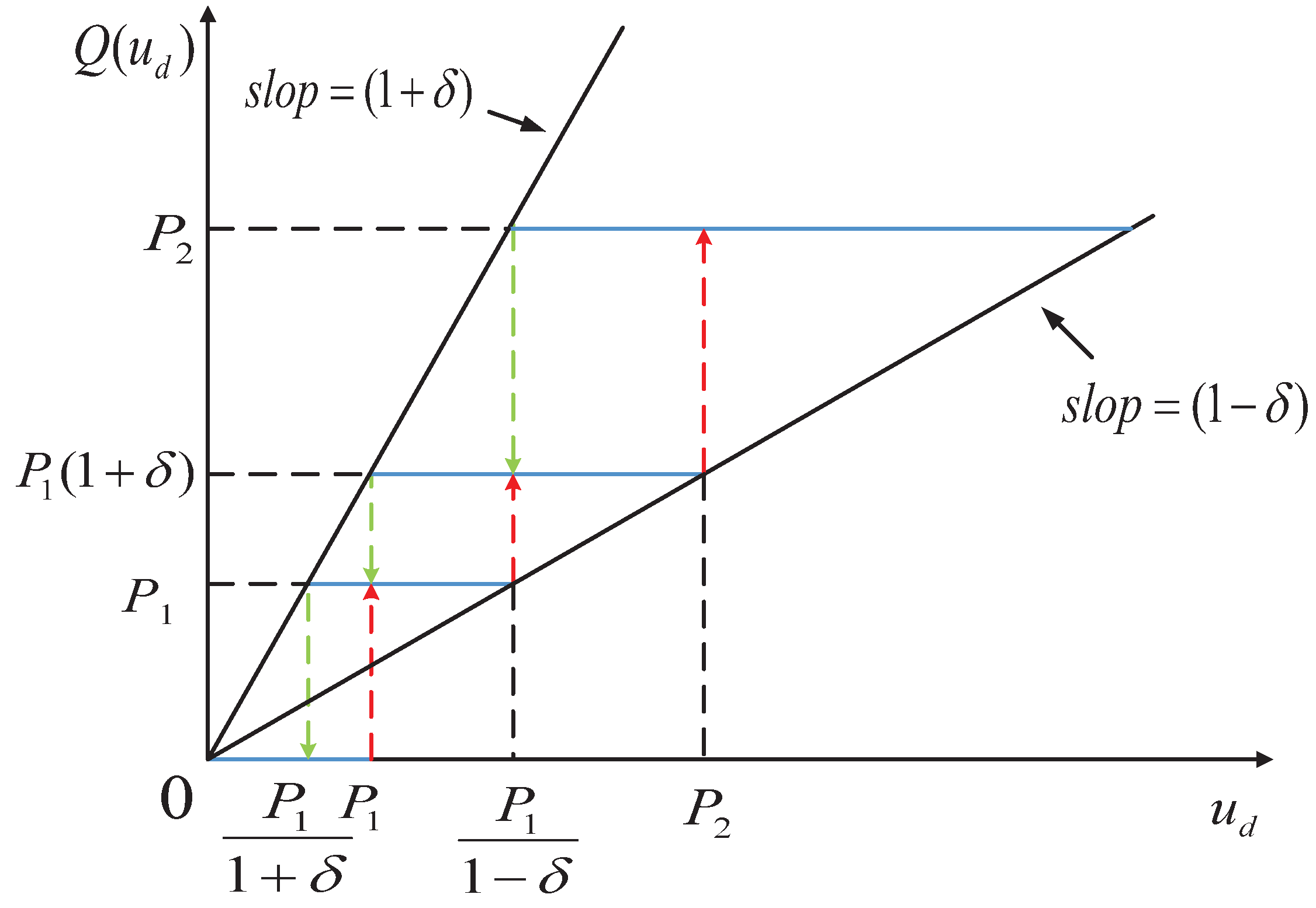
2.3. Quantizer with Hysteresis Characteristic
3. Quantized Controller Design and Stability Analysis
3.1. Velocity Subsystem Control Design
3.2. Altitude Subsystem Controller Design
3.3. Stability Analysis
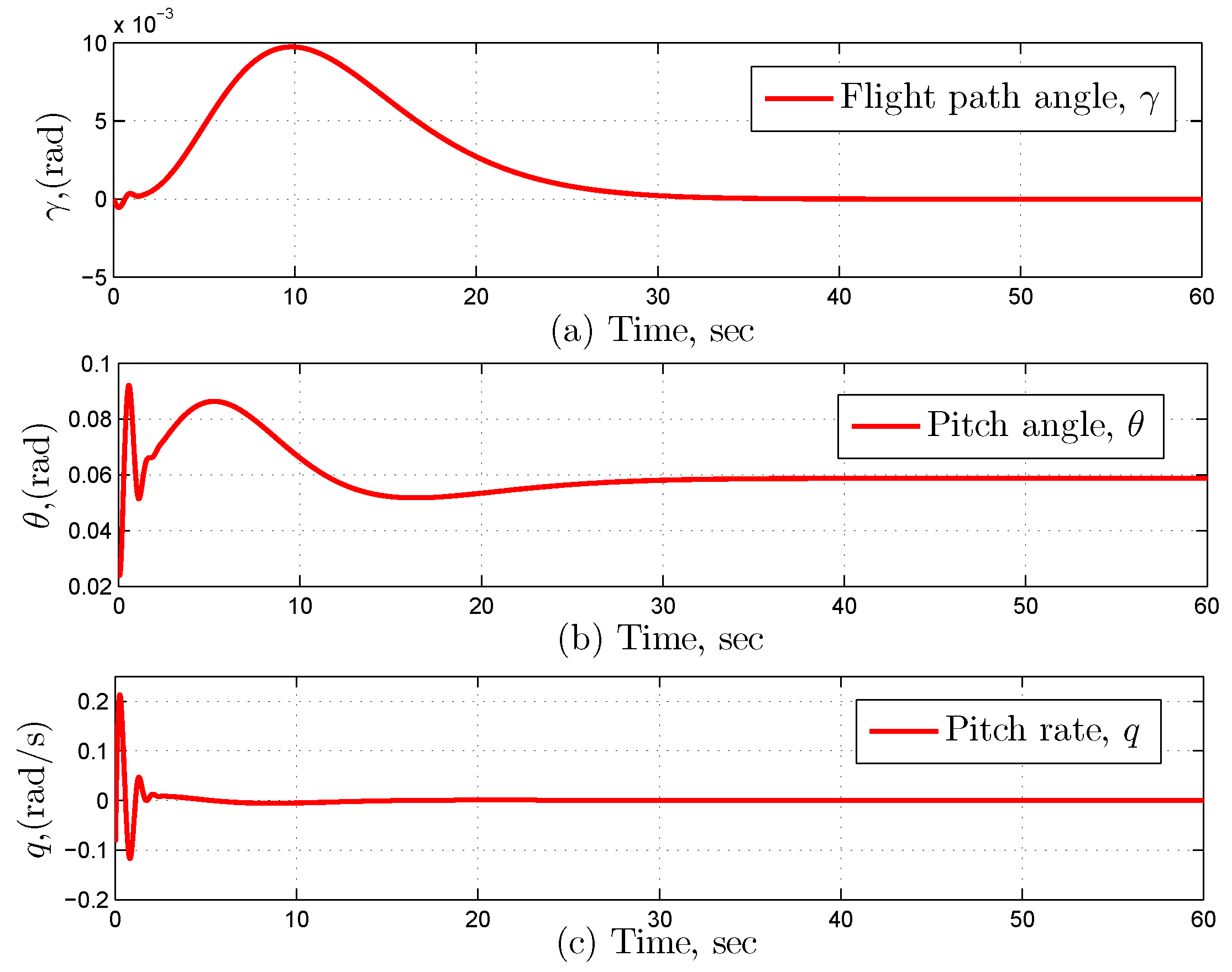
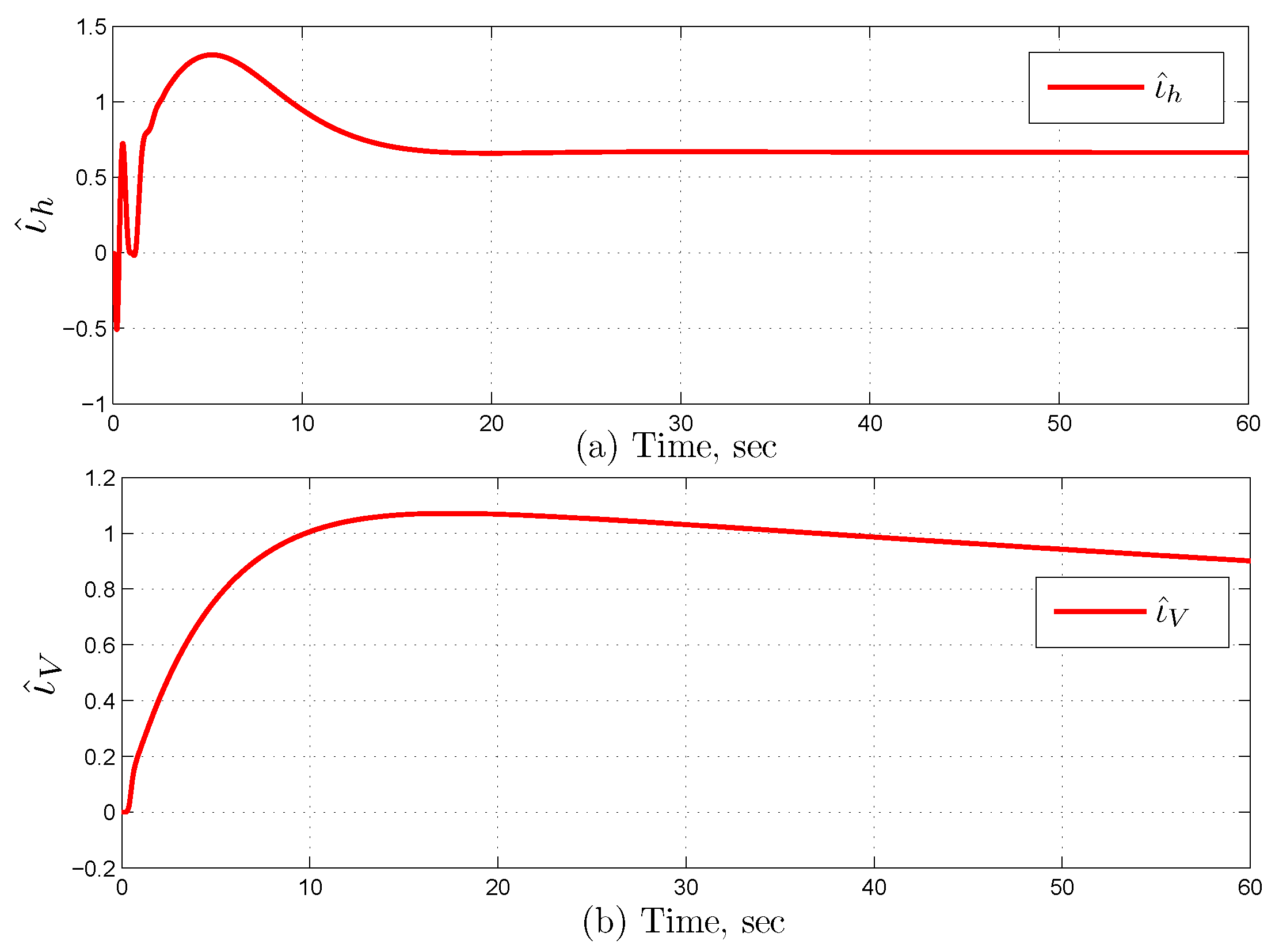
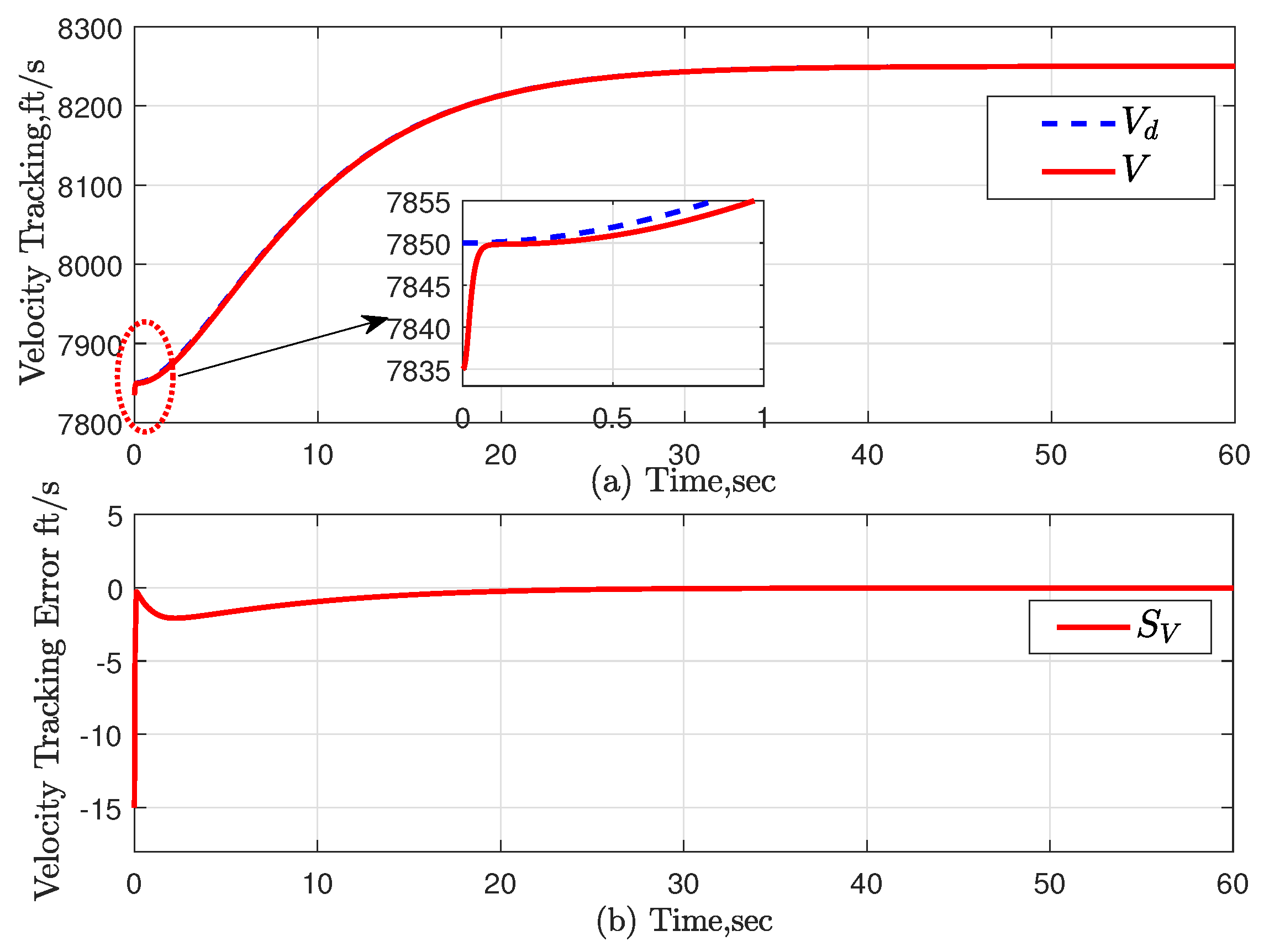
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Moses, P.L.; Rausch, V.L.; Nguyen, L.T.; Hill, J.R. NASA hypersonic flight demonstrators—Overview, status, and future plans. Acta Astronaut. 2004, 55, 619–630. [Google Scholar] [CrossRef]
- Sziroczak, D.; Smith, H. A review of design issues specific to hypersonic flight vehicles. Prog. Aerosp. Sci. 2016, 84, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Mirmirani, M.D.; Ioannou, P.A. Adaptive sliding mode control design for a hypersonic flight vehicle. J. Guid. Control Dyn. 2004, 27, 829–838. [Google Scholar] [CrossRef]
- Hirschel, E.H.; Weiland, C. Selected Aerothermodynamic Design Problems of Hypersonic Flight Vehicles; Springer Science & Business Media: Cham, Switzerland, 2009; Volume 229. [Google Scholar]
- Xu, B.; Wang, D.; Sun, F.; Shi, Z. Direct neural discrete control of hypersonic flight vehicle. Nonlinear Dyn. 2012, 70, 269–278. [Google Scholar] [CrossRef]
- Xu, B.; Gao, D.; Wang, S. Adaptive neural control based on HGO for hypersonic flight vehicles. Sci. China Inf. Sci. 2011, 54, 511–520. [Google Scholar] [CrossRef] [Green Version]
- Xu, B.; Shi, Z. An overview on flight dynamics and control approaches for hypersonic vehicles. Sci. China Inf. Sci. 2015, 58, 1–19. [Google Scholar] [CrossRef]
- Guoqiang, Z.; Jinkun, L. Neural network-based adaptive backstepping control for hypersonic flight vehicles with prescribed tracking performance. Math. Probl. Eng. 2015, 2015, 591789. [Google Scholar] [CrossRef] [Green Version]
- Ma, T.N.; Xi, R.D.; Xiao, X.; Yang, Z.X. Nonlinear Extended State Observer Based Prescribed Performance Control for Quadrotor UAV with Attitude and Input Saturation Constraints. Machines 2022, 10, 551. [Google Scholar] [CrossRef]
- Rehman, O.U.; Fidan, B.; Petersen, I.R. Uncertainty modeling and robust minimax LQR control of multivariable nonlinear systems with application to hypersonic flight. Asian J. Control 2012, 14, 1180–1193. [Google Scholar] [CrossRef]
- Liu, J.; An, H.; Gao, Y.; Wang, C.; Wu, L. Adaptive control of hypersonic flight vehicles with limited angle-of-attack. IEEE/ASME Trans. Mechatron. 2018, 23, 883–894. [Google Scholar]
- He, N.; Gao, Q.; Gutierrez, H.; Jiang, C.; Yang, Y.; Bi, Y. Robust adaptive dynamic surface control for hypersonic vehicles. Nonlinear Dyn. 2018, 93, 1109–1120. [Google Scholar] [CrossRef]
- Shao, X.; Shi, Y.; Zhang, W. Fault-tolerant quantized control for flexible air-breathing hypersonic vehicles with appointed-time tracking performances. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 1261–1273. [Google Scholar] [CrossRef]
- Qiao, H.; Meng, H.; Wang, M.; Ke, W.; Sun, J.G. Adaptive control for hypersonic vehicle with input saturation and state constraints. Aerosp. Sci. Technol. 2019, 84, 107–119. [Google Scholar] [CrossRef]
- Rigatos, G.; Siano, P.; Selisteanu, D.; Precup, R. Nonlinear optimal control of oxygen and carbon dioxide levels in blood. Intell. Ind. Syst. 2017, 3, 61–75. [Google Scholar] [CrossRef]
- Feng, Y.; Wu, M.; Chen, L.; Chen, X.; Cao, W.; Du, S.; Pedrycz, W. Hybrid intelligent control based on condition identification for combustion process in heating furnace of compact strip production. IEEE Trans. Ind. Electron. 2021, 69, 2790–2800. [Google Scholar] [CrossRef]
- Kwan, C.; Lewis, F.L. Robust backstepping control of nonlinear systems using neural networks. IEEE Trans. Syst. Man Cybern. Part Syst. Hum. 2000, 30, 753–766. [Google Scholar] [CrossRef]
- Li, Y.; Qiang, S.; Zhuang, X.; Kaynak, O. Robust and adaptive backstepping control for nonlinear systems using RBF neural networks. IEEE Trans. Neural Netw. 2004, 15, 693–701. [Google Scholar] [CrossRef]
- Xue, G.; Lin, F.; Li, S.; Liu, H. Adaptive fuzzy finite-time backstepping control of fractional-order nonlinear systems with actuator faults via command-filtering and sliding mode technique. Inf. Sci. 2022, 600, 189–208. [Google Scholar] [CrossRef]
- Yang, X.; Deng, W.; Yao, J. Neural adaptive dynamic surface asymptotic tracking control of hydraulic manipulators with guaranteed transient performance. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–11. [Google Scholar] [CrossRef]
- Shi, W.; Hou, M.; Hao, M. Adaptive robust dynamic surface asymptotic tracking for uncertain strict-feedback nonlinear systems with unknown control direction. ISA Trans. 2022, 121, 95–104. [Google Scholar] [CrossRef]
- Pan, Y.; Yu, H. Composite learning from adaptive dynamic surface control. IEEE Trans. Autom. Control 2015, 61, 2603–2609. [Google Scholar] [CrossRef]
- Ge, J.; Wang, M.; Hong, H.; Zhao, J.; Cai, G.; Zhang, X.; Lu, P. Discrete-Time Adaptive Decentralized Control for Interconnected Multi-Machine Power Systems with Input Quantization. Machines 2022, 10, 878. [Google Scholar] [CrossRef]
- Nie, L.; Luo, Y.; Gao, W.; Zhou, M. Rate-dependent asymmetric hysteresis modeling and robust adaptive trajectory tracking for piezoelectric micropositioning stages. Nonlinear Dyn. 2022, 108, 2023–2043. [Google Scholar] [CrossRef]
- Zhu, G.; Li, H.; Zhang, X.; Wang, C.; Su, C.Y.; Hu, J. Adaptive consensus quantized control for a class of high-order nonlinear multi-agent systems with input hysteresis and full state constraints. IEEE/CAA J. Autom. Sin. 2022, 9, 1574–1589. [Google Scholar]
- Gao, H.; Chen, T. A new approach to quantized feedback control systems. Automatica 2008, 44, 534–542. [Google Scholar] [CrossRef]
- Jiang, Z.P.; Teng-Fei, L. Quantized nonlinear control—A survey. Acta Autom. Sin. 2013, 39, 1820–1830. [Google Scholar] [CrossRef]
- Khargonekar, P.P.; Petersen, I.R.; Zhou, K. Robust stabilization of uncertain linear systems: Quadratic stabilizability and H/sup infinity/control theory. IEEE Trans. Autom. Control 1990, 35, 356–361. [Google Scholar] [CrossRef]
- Xue, Y.; Zheng, B.C.; Yu, X. Robust sliding mode control for TS fuzzy systems via quantized state feedback. IEEE Trans. Fuzzy Syst. 2017, 26, 2261–2272. [Google Scholar] [CrossRef]
- Lu, P.; Liu, M.; Zhang, X.; Zhu, G.; Li, Z.; Su, C.Y. Neural Network Based Adaptive Event-Triggered Control for Quadrotor Unmanned Aircraft Robotics. Machines 2022, 10, 617. [Google Scholar] [CrossRef]
- Hayakawa, T.; Ishii, H.; Tsumura, K. Adaptive quantized control for linear uncertain discrete-time systems. Automatica 2009, 45, 692–700. [Google Scholar] [CrossRef]
- Yu, X.; Lin, Y. Adaptive backstepping quantized control for a class of nonlinear systems. IEEE Trans. Autom. Control 2016, 62, 981–985. [Google Scholar] [CrossRef]
- Zhang, C.; Yu, Y.; Zhou, M. Finite-time adaptive quantized motion control for hysteretic systems with application to piezoelectric-driven micropositioning stage. IEEE/ASME Trans. Mechatron. 2023, 1–12. [Google Scholar] [CrossRef]
- Li, Y.; Liang, S.; Xu, B.; Hou, M. Predefined-time asymptotic tracking control for hypersonic flight vehicles with input quantization and faults. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2826–2837. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, J.; Wang, Z.; Wu, L. Interval type-2 FNN-based quantized tracking control for hypersonic flight vehicles with prescribed performance. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1981–1993. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, H.; Chen, X.; Li, Z.; Su, C.Y. Modeling and Adaptive Output Feedback Control of Butterfly-like Hysteretic Nonlinear Systems with Creep and Their Applications. IEEE Trans. Ind. Electron. 2023, 70, 5182–5191. [Google Scholar] [CrossRef]
- Zamfirache, I.A.; Precup, R.E.; Roman, R.C.; Petriu, E.M. Neural Network-based Control Using Actor-Critic Reinforcement Learning and Grey Wolf Optimizer with Experimental Servo System Validation. Expert Syst. Appl. 2023, 120112. [Google Scholar] [CrossRef]
- Wang, C.; Lin, Y. Multivariable adaptive backstepping control: A norm estimation approach. IEEE Trans. Autom. Control 2011, 57, 989–995. [Google Scholar] [CrossRef]
- Chen, B.; Liu, X.; Liu, K.; Lin, C. Direct adaptive fuzzy control of nonlinear strict-feedback systems. Automatica 2009, 45, 1530–1535. [Google Scholar] [CrossRef]
- Chen, M.; Ge, S.S. Direct adaptive neural control for a class of uncertain nonaffine nonlinear systems based on disturbance observer. IEEE Trans. Cybern. 2012, 43, 1213–1225. [Google Scholar] [CrossRef]
- Zhao, Q.; Lin, Y. Adaptive fuzzy dynamic surface control with prespecified tracking performance for a class of nonlinear systems. Asian J. Control 2011, 13, 1082–1091. [Google Scholar] [CrossRef]
- Liang, H.; Zhang, Y.; Huang, T.; Ma, H. Prescribed performance cooperative control for multiagent systems with input quantization. IEEE Trans. Cybern. 2019, 50, 1810–1819. [Google Scholar] [CrossRef] [PubMed]
- Parker, J.T.; Serrani, A.; Yurkovich, S.; Bolender, M.A.; Doman, D.B. Control-oriented modeling of an air-breathing hypersonic vehicle. J. Guid. Control Dyn. 2007, 30, 856–869. [Google Scholar] [CrossRef]
- Xu, B.; Wang, D.; Zhang, Y.; Shi, Z. DOB-based neural control of flexible hypersonic flight vehicle considering wind effects. IEEE Trans. Ind. Electron. 2017, 64, 8676–8685. [Google Scholar] [CrossRef]
- Bolender, M.A.; Doman, D.B. Nonlinear longitudinal dynamical model of an air-breathing hypersonic vehicle. J. Spacecr. Rocket. 2007, 44, 374–387. [Google Scholar] [CrossRef]
- Yingwei, L.; Sundararajan, N.; Saratchandran, P. Performance evaluation of a sequential minimal radial basis function (RBF) neural network learning algorithm. IEEE Trans. Neural Netw. 1998, 9, 308–318. [Google Scholar] [CrossRef]
- Sanner, R.M.; Slotine, J.J.E. Gaussian Networks for Direct Adaptive Control. In Proceedings of the 1991 American Control Conference, Boston, MA, USA, 26–28 June 1991; pp. 2153–2159. [Google Scholar]
- Lewis, F.L.; Liu, K.; Yesildirek, A. Neural net robot controller with guaranteed tracking performance. IEEE Trans. Neural Netw. 1995, 6, 703–715. [Google Scholar] [CrossRef]
- Kobayashi, H.; Ozawa, R. Adaptive neural network control of tendon-driven mechanisms with elastic tendons. Automatica 2003, 39, 1509–1519. [Google Scholar] [CrossRef]
- Wang, C.; Wen, C.; Lin, Y.; Wang, W. Decentralized adaptive tracking control for a class of interconnected nonlinear systems with input quantization. Automatica 2017, 81, 359–368. [Google Scholar]
- Hayakawa, T.; Ishii, H.; Tsumura, K. Adaptive quantized control for nonlinear uncertain systems. Syst. Control Lett. 2009, 58, 625–632. [Google Scholar] [CrossRef]
- Zhou, J.; Wen, C.; Yang, G. Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal. IEEE Trans. Autom. Control 2013, 59, 460–464. [Google Scholar] [CrossRef]
- Tang, X.; Zhai, D.; Li, X. Adaptive fault-tolerance control based finite-time backstepping for hypersonic flight vehicle with full state constrains. Inf. Sci. 2020, 507, 53–66. [Google Scholar] [CrossRef]
- Xu, B.; Huang, X.; Wang, D.; Sun, F. Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation. Asian J. Control 2014, 16, 162–174. [Google Scholar] [CrossRef]
- Butt, W. Observer based dynamic surface control of a hypersonic flight vehicle. Int. J. Smart Sens. Intell. Syst. 2013, 6, 664–688. [Google Scholar] [CrossRef] [Green Version]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, W.; Lu, Z.; Bi, Z.; Zhong, C.; Tian, D.; Zhang, Y.; Zhang, X.; Zhu, G. Decentralized Adaptive Quantized Dynamic Surface Control for a Class of Flexible Hypersonic Flight Vehicles with Input Quantization. Machines 2023, 11, 630. https://doi.org/10.3390/machines11060630
Zhao W, Lu Z, Bi Z, Zhong C, Tian D, Zhang Y, Zhang X, Zhu G. Decentralized Adaptive Quantized Dynamic Surface Control for a Class of Flexible Hypersonic Flight Vehicles with Input Quantization. Machines. 2023; 11(6):630. https://doi.org/10.3390/machines11060630
Chicago/Turabian StyleZhao, Wenyan, Zeyu Lu, Zijian Bi, Cheng Zhong, Dianxiong Tian, Yanhui Zhang, Xiuyu Zhang, and Guoqiang Zhu. 2023. "Decentralized Adaptive Quantized Dynamic Surface Control for a Class of Flexible Hypersonic Flight Vehicles with Input Quantization" Machines 11, no. 6: 630. https://doi.org/10.3390/machines11060630