
The CanSat Compendium: A Review of Scientific CanSats

1
Department of Robotics and Mechatronics Engineering, Kennesaw State University,1100 South Marietta Pkwy SE, Marietta, GA 30060, USA
2
Department of Electrical Engineering, Kennesaw State University, 1100 South Marietta Pkwy SE, Marietta, GA 30060, USA
*
Author to whom correspondence should be addressed.
Machines 2023, 11(7), 675; https://doi.org/10.3390/machines11070675
Submission received: 31 May 2023
/
Revised: 16 June 2023
/
Accepted: 21 June 2023
/
Published: 22 June 2023
(This article belongs to the Special Issue New Trends in Robotics and Mechatronics Engineering)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:In recent years, CubeSats have gained popularity as secondary payloads in space missions due to their uniquely small size and minimal weight. This allows for the quick and inexpensive development of high-risk, high-reward investigations. The success of cube-shaped CubeSats has led to the development of a new class of small-scale and low-cost scientific platforms known as CanSats, which maintain a unique cylindrical shape. CanSats offer an even more economical alternative for conducting high-risk investigations, although they are typically constrained by having to operate within Earth’s atmosphere, which contributes to their reduced costs. However, the ability to test and improve space-bound hardware makes the CanSat a potential intermediary technology for continued space exploration. This survey paper seeks to provide a technical definition of CanSats and summarize the current state of the art in CanSat-based research. This paper covers the history of CanSats, their current mainstream applications, and their potential impact on the technology pipeline for space exploration. CanSats have proven to be versatile in various applications, including Earth science, aeronautics, and educational purposes. The lower cost of CanSats provides a wider range of researchers and educational institutions access to near-space science. Therefore, this paper also aims to explore the potential future applications of CanSats, particularly as an intermediary technology for testing and improving space-bound hardware, with potential benefits for future space missions. The findings from this survey could help to guide the further research and development of CanSats, as well as help to shape future space exploration efforts.
1. Introduction
The exploration of extraplanetary destinations has been greatly advanced through the use of robotic systems. Historically, these devices have been expensive to build and operate, and therefore have been typically sponsored by the military or other governmental institutions. With the recent introduction of low-cost nanosatellites, and especially CubeSats, the accessibility of space-based science has drastically improved. However, for organizations of very limited means and expertise, a CubeSat may still be an infeasible near-term technical goal. Enter the CanSat. As a technological tier below the CubeSat, CanSats are far less onerous to build and fly. CanSats represent terrestrial satellite analogues, which make them inexpensive to construct, they do not need to abide by stringent pre-flight testing, and are therefore hugely useful as educational tools or intermediary scientific platforms. The following review begins with a brief history of the development of CanSats, followed by a review of current CanSat applications and CanSat-related studies. After decomposing the major research areas for CanSats, a working technical definition of these devices is developed in the following section, with some potential future directions for this technology paradigm further explored in the final section of this review.
2. History
The history of CanSats is inexorably entwined with the history of CubeSats. Both have origins in Stanford University, dating back as far as 1995, when the graduate program began working on different formats of small-scale satellites known as microsatellites, or microsats [1]. Modern “medium-sized” satellites typically range in mass from 500 to 1000 kg, while “micro-satellites” typically fall in a range of 10 to 100 kg, and even smaller “nano-satellites” are often classified in a mass range of 1 to 10 kg [2]. As an instructor at Stanford University, Professor Robert Twiggs had been actively engaged in creating the curriculum for the Aeronautics and Astronautics graduate program. This included the establishment of the Space Systems Development Laboratory (SSDL) at Stanford University. As described by Twiggs, the goal of this program was “to take students through the full life cycle of a project”, which included “designing, building, launching and operating microsatellites in space” [3]. However, the origins of the CubeSat actually started with vehicles even smaller than a microsatellite.
DARPA and the Aerospace Corporation partnered with Stanford University in 1998 to develop picosatellites that would be similar in size to a Klondike ice cream sandwich [1]. Picosatellites are much smaller than microsatellites, and are typically classified as satellites with a mass of 0.1 to 1 kg [2]. Importantly, satellites of this size must be launched from a larger vehicle, so the DARPA picosatellites were carried in a larger microsatellite that was developed by students at Stanford. This larger picosatellite carrying microsatellite was named OPAL (Orbiting Picosat Automated Launcher), and is featured in Figure 1 [1]. OPAL was successfully launched, and demonstrated the capability to deploy six picosatellites, but the development of the larger microsatellite took over four years. Furthermore, this long development period did not align with the goals of Stanford’s SSDL program, as the students were not able to experience the entire life cycle of the satellite before graduating. The program had been targeting the full development of the microsatellite to be completed over a period of only a single year, to ensure that students would be able to have hands-on experience in all areas of satellite development and operation. Therefore, following the development of the OPAL microsatellite, the SSDL program decided to change focus to developing smaller picosatellites instead of the larger microsatellites [3].
The size and shape of these picosatellites was largely driven by the solar cells available for the project and the expected power requirements of the system. Initial experimentation found that a 4-inch beanie baby display case was a good size for the solar cells. This cubic shape was eventually refined to a metric standard that consisted of a 10-cm cube with special rails to separate a stack of the CubeSats in the launcher. Since a 10-cm cube holds a liter of water, and a liter of water weights 1 kg, this became the accepted standard for a single unit CubeSat: 10-cm cubed with a maximum mass of 1 kg [1]. Further collaboration between Stanford University and California Polytechnic State University saw the creation of the first P-POD (Poly Picosat Orbiting Deployer), which allowed three CubeSats to be stacked inside a specially reinforced enclosure. As CubeSats were still highly experimental at this time, the container ensured that the CubeSats would not damage the launch vehicle if they experienced mechanical failures during launch. In 2003, the first CubeSats were launched into orbit on a Russian rocket [1,3].
During this process of developing both micro and pico-sized satellites, Professor Twiggs attended the University Space Systems Symposium (USSS) in November 1998. It was at this conference in Hawaii that Twiggs presented a simple aluminum drinking can to the crowd and declared that a satellite should be able to be created from this common cylindrical object. This was the first time in history that the concept of a “CanSat” had ever been articulated in public. It was further proposed during the symposium that individual universities would create microsatellites that could fit in the 350 mL soda can and launch them into orbit before the conference met again next year. Failure to secure orbital launch opportunities ultimately led to a pivot toward amateur rocket launches that could simulate much of the launch conditions and environment of space using suborbital trajectories [4].
Following USSS 1998, the CanSat concept was quickly oriented toward an educational endeavor that was jointly directed by the United States and Japan. An amateur rocketry organization in the US, known as ARLISS, supplied rockets and expertise to launch the CanSats in suborbital trajectories that would reach a maximum altitude of 12,000 feet (~3.7 km). For the first CanSat event in 1999, only six universities had agreed to take part in the project. The three CanSats developed by the University of Tokyo were heavily focused on flight-proving hardware that was intended to be used on a future orbital mission. Their experimental CanSats included scientific goals for testing technologies such as reaction wheels for attitude control and wireless communication methodologies for telemetry downlink and uplink, in addition to testing onboard cameras and other sensors [5]. Educational institutes from the United States, including Arizona State University and Kennedy Middle School also contributed to the event in 1999 [6].
The following year, 2000, saw an increased interest in the program, with new educational institutes joining the endeavor. Experimental projects generated by the University of Tokyo included a CanSat equipped with a landing system, and a GPS experiment that employed three CanSats that communicated with each other during their descent to the ground [5]. Notably, during these first two years of CanSat experimentation, the focus of the program was on education and hardware testing. However, in 2001 Professor Shinichi Nakasuka from the University of Tokyo suggested a new angle to the CanSat program that would introduce a competitive aspect between the various educational institutions participating. The goal of the competition would be to have the CanSats return to some predetermined landing location that in close proximity to the initial launch site. The first iteration of this competition in 2001 focused on a “fly-back” architecture, where the CanSats would employ controllable parafoils or fixed aerodynamic control surfaces to guide the descent of the vehicle. Terrestrial-based navigational solutions also appeared in these competitions during the following year in 2002. These “run-back” vehicles employed wheeled chassis to propel the CanSat across the ground and back to the landing target [6].
In the years to follow, other CanSat competitions continued to be established across the globe. An annual competition organized by the American Astronautical Society (AAS) was started in this 2004, with college students challenged to complete a variety of different space oriented mission objectives [7]. This competition has continued through 2023 and has become one of the more popular CanSat-related competitions in the US [8]. In 2007, the European Space Agency (ESA) organized the first pilot program for a national CanSat competition. Additional expansions of this program took place in the following years as a means to engage “upper secondary school students” [9]. The ESA CanSat competition continues to be very popular in Europe through 2023 [10]. Although initially intended as educational tools, CanSat competitions and their capacity to flight prove space-bound hardware has demonstrated that these devices have serious scientific merit. The following section explores the modern literature concerning CanSats, to discern the relevant scientific frontiers that are applicable to these devices.
3. CanSats in Application
Just as real satellites can have applications varying from meteorological to military surveillance, the scientific goals that motivate the creation of CanSats vary between many disciplines. The following section can only provide a brief glimpse into some of the fields of application and CanSat-based research endeavors. However, these examples of CanSat-based research aim to elucidate the purpose of modern scientific CanSats and to discern the technical confines of these devices.
3.1. Education
The educational significance of CanSats has already been described in part, as their original inception came from the vision of Professor Twiggs and others to provide real-world and hands-on experience for students in engineering programs. Over two decades later, education is still at the core of many CanSat-related endeavors. This is particularly apparent in the sheer quantity of the analyzed CanSat literature that was directly related to some form of CanSat competition. Descriptions concerning the first CanSat competition in Thailand [11], a CanSat design event in Bangladesh [12], and an educational engineering project from Cairo University in Egypt [13], show how students and educators across the world are leveraging this technology. José Contente and Cecília Galvão performed an in-depth analysis [14] of the educational benefit of participating in a CanSat competition for high-school students. Their conclusions suggest that problem-solving and multi-lateral thinking are encouraged by the project and can act to “reduce the barrier between school and real-life” [14]. Students building CanSats for academic competitions can also find relevant research novelty during this process.
Although most CanSat competitions focus on educational value, and not on research novelty, the nature of problem solving in the face of diverse engineering challenges can yield serendipitous results. To provide a few examples, researchers at the University of Nuevo León participated in a CanSat Leader Training Program (CLTP), held at the University of Hokkaido-Japan. Following the success of their CanSat in the training program, the researchers identified a potentially novel application of their device for localized weather monitoring, to help determine an optimal location for constructing an astronomical observatory [4]. Students from Telkom University in Bandung, Indonesia described their mechanical structure and technical design for an Auto-Gyro CanSat [15], while researchers at the National Technological University of South Lima in El Salvador, Peru tested the use of CanSats as low-cost environmental monitoring devices, to improve access to air quality data [16].
The educational benefits of CanSats are also not limited to students. The CanSat Leaders Training Program (CLTP) is an annual event which engages university instructors. The goal of this program is to educate the educators on how to start CanSat programs in their countries or universities. CLTP is organized by UNISEC, a Japanese organization which supports CanSat research and development. Collectively, CLTP and UNISEC have been a significant driving force behind the increased interest and advancement of CanSat programs across the globe [6].
CanSats also represent an important technological gateway for organizations and countries generally seeking to engage in near-space or space-bound technologies. In particular, academic programs that compete in CanSat competition or build CanSats for scientific studies typically do so as a means to train students and educators on how to operate systems that behave like real satellites [2]. This educational pipeline is viewed as a crucial mechanism for preparing a workforce of capable technicians and engineers with “hands-on experience” [9]. In some countries, this educational process begins as early as secondary school, which emphasizes the importance of CanSats as an educational aids [17]. However, CanSats also exist beyond the classroom. The next section focuses on Earth studies and the atmosphere to outline more of the ways CanSats are used.
3.2. Earth and Atmospheric Studies
The investigative goals of both competition and scientific CanSats commonly include atmospheric or environmental data collection. Many of these CanSats designed for Earth Studies also utilize balloons to lift them to a desired altitude, before descending back to the surface of Earth with the assistance of a parachute [18,19]. In this way, some CanSats closely resemble commercial meteorological instrumentation known as radiosondes, such as the CanSat featured in Figure 2 from [20]. A more in-depth analysis of similarities and differences between CanSats and radiosondes has been compiled in the Definition section of this paper. Relevant here are key sensory choices that appear in many CanSat systems and their application for studying phenomenon above Earth and within its atmosphere.
Measurements from temperature and pressure sensors can be useful for extrapolating altitude, in particular, Commercial off-the-Shelf (COTS) components, such as the BMP-180 or BMP-280, provide an altitude estimation, in addition to atmospheric temperature and pressure. Therefore, these devices are a common sensor choice for CanSats [19,21]. Temperature and pressure provide general indicators of atmospheric conditions, but CanSats designed for environmental monitoring also utilize more advanced Air Quality Sensors, such as the MQ-135 [22], or other gas sensors, such as the MQ-9 [23]. The use of low-cost GPS modules in CanSats is also a widely accepted practice. Logging or transmitting GPS coordinates assists with recovering CanSats, and for devices with meteorological goals, helps to correlate sensor readings with geographic locations [16,24]. Some additional examples of Scientific CanSats that leverage these COTS sensors and that have been specially designed for Earth science investigations include a CanSat for measuring UV radiation proposed by Bhad et al. [25], a lightweight CanSat for atmospheric measurements [18], and an environmental monitoring network of multiple CanSats [26]. These devices are particularly relevant for demonstrating the unique capacity of CanSats to be leveraged in meteorological and atmospheric studies. Since CanSats must interact with Earth’s atmosphere to perform atmospheric measurements, it may logically follow that CanSats can also be used for aeronautic investigations. The next section highlights the relevant CanSat literature related to this field.
3.3. Aeronautic
Many CanSat studies related to aeronautics have their origins in various CanSat competitions. Beginning with the 2019 competition, organizers challenged student teams to design an “Auto-Gyro Probe”, which could be released from the CanSats after deployment from a rocket [27]. A similar challenge followed in 2021 with the “Autorotating Science Payload Relay”, which called for entries that took inspiration from the aerodynamics of a maple seed [28]. These design competitions resulted in a selection of scholarly works which investigated the general design and integration of the auto-gyro recovery system [15], the use of Computational Fluid Dynamics (CFD) simulations for validating the CanSat design [29], and the biomimicry of maple seeds for creating a unique recovery vehicle [30]. Other competitions have focused on the creation of secondary glider vehicles that could be deployed from the primary CanSat to collect sensor readings in a circular glide path, with these competitions taking place most recently in 2017 [31] and 2020 [32], respectively. Relevant research outcomes related to these competitions include compact and collapsible glider wings [33], a “novel descent control system” [34], and the use of 3D-printed techniques for creating unique and flexible designs for the glider [35]. Beyond simply measuring data or flying through the atmosphere, CanSats must also be able to collect scientific data and send that information back to scientists on the ground. The next section explores the state of the art in CanSat data transmission and handling.
3.4. Data Handling and Wireless Transmision
Just as with orbital satellites, CanSats must be able to internally store and route data from sensors, while also managing a means for wirelessly communicating this data to some form of ground station. Typically, data transmission begins after a CanSat has started its descent back to the surface of the Earth and may, therefore, only last for a few minutes. Starting in 1999 with the ARLISS events, and continuing with many current CanSat competitions, the launch altitudes of the devices are calibrated with the purpose of providing flight times that would be similar to a horizon-to-horizon pass of a satellite in Low Earth Orbit (LEO). These flight times can vary from as little as 5 min to as long as 20 min, depending on the ascent vehicle and launch conditions [5,9]. During this short transmission window, CanSats can employ a wide variety of wireless communication techniques. Many CanSat competitions suggest or require the use of Zigbee communication standards and often the use of Xbee radios that operate on frequencies of 2.4 GHz or 900 MHz [8]. It is therefore common to find CanSats that utilize these radios and standards [6,15,36]. However, CubeSats typically employ longer range Ultra High Frequency (UHF) or Very High Frequency (VHF) communication standards [1,37,38,39], which are further utilized by various scientific CanSats, including the stratospheric CanSat featured in Figure 3 [19,40].
Thus, some CanSat-based research efforts focus on the development of effective and user-friendly ground stations [41], while other investigations holistically develop both the ground station receiver and the CanSat transmitter architectures simultaneously [18,42]. CanSats that further feature multiple independent scientific devices can also demonstrate multi-channel communication experiments. A competition CanSat developed by Songül et al. provides a convenient point of reference as their CanSat featured a secondary descent vehicle that would be released from the main CanSat during the competition. Both the main CanSat “container” and the dropped “payload” were equipped with Xbee radios and configured to communicate in a “star topology” with the main coordinating radio residing at the ground station [36]. This communication architecture demonstrates a small-scale application of an Internet Of Things (IOT) network, which has been further investigated by other CanSat-related studies [4,20]. This use case for CanSats also elucidates a general theme for CanSat-related investigations, namely that CanSats are effective tools for testing new hardware or software solutions. The final application section investigates other relevant circumstances where CanSats were leveraged as testing platforms for new technologies.
3.5. General Hardware and Software Testing
The flexible design characteristics of CanSats make them excellent testbeds for a variety of scientific and student learning applications. In particular, “flyback” or “comeback competitions” provide a unique opportunity for student led research teams to design both aerodynamic and ground-based navigational strategies for guiding CanSat-based payloads to arrive at a predetermined terrestrial target [6,43]. These competitions are of particular interest, as unconventional hardware and software solutions are often employed to gain an edge on competitors. Some examples of scholarly work focus heavily on analyzing the hardware, such as the research of Nuñez-Quispe concerning lightweight non-pneumatic wheels equipped to a comeback CanSat [44]. Other works focus primarily on the software side of the CanSat device, such as a report from Akiyama et al., which describes the use of an object identification algorithm to aid in the guidance of a CanSat comeback rover [45]. However, a competition-worthy CanSat must necessarily find a way to harmoniously integrate both hardware and software elements together into a single device. Examples of such work include systems that attempt to use both parachute canopies in conjunction with motor driven propellers [46], CanSats that consist of self-navigating ground-based wheeled rovers [47], devices that employ controllable parafoils [6], or systems which deploy fixed wings with control surfaces [48]. These efforts offer a glimpse into the diverse ecosystem of hardware and autonomous software control mechanisms being tested in conjunction with CanSat competitions.
Comeback competitions do not represent the sole vector for scholarly work in CanSat system testing. Investigations that utilize CanSats as a scientific platform for general engineering methodologies demonstrate the potential utility of these devices [49]. CanSats are explored as a general scientific tool in a study by Abo-Arais et al., where the potential development of a small-scale satellite was first investigated through the creation of a CanSat [50]. Other works show how a CanSat can provide a convenient opportunity for conducting an electrical power analysis study [51], or for generally integrating complex electromechanical systems into a single operational device [49,52].
The research of Rodríguez et al. [40] offers a particularly compelling argument that CanSat architectures can be validated using CubeSat aerospace standards for successful stratospheric scientific campaigns. The rigorous statistical testing and application of a Design of Experiment (DoE) strategy, in addition to laboratory and field testing, provides a clear mechanism for validating a CanSat design. The use of Commercial off-the-Shelf (COTS) components and an overall modular CanSat design, which would further improve accessibility to this technology, was also significant in this work [40]. Another important advantage of CanSat-based experimental studies is the flexibility of the CanSat architecture. Utilizing the same general system design as [40], Botero et al. were able to create a novel high-altitude pollution sensor network. While many of the same components and systems configurations were maintained between the two projects, drastically different scientific outcomes could be achieved, and new hardware solutions could be rapidly tested [20].
4. Definition
Before articulating an in-depth definition of what constitutes a CanSat, it is important to establish what a CanSat is not. In particular, two well-defined technological frontiers, namely radiosondes and CubeSats, share significant operational parameters with CanSats, and must therefore be separated to form a technical definition.
4.1. CanSats Are Not Radiosondes
CanSats configured for atmospheric or meteorological investigations often share significant operational characteristics with another common weather monitoring instrument known as a radiosonde [21]. Commercial devices, such as Vaisala’s RS41-SG radiosonde, provide a means for private or government collectives to conduct high-altitude atmospheric soundings. This instrument wirelessly transmits temperature, humidity, altitude, and air pressure, along with wind direction and speed, as it ascends through the atmosphere with the help of a helium filled balloon [53]. Like CanSats, radiosondes can carry a variety of sensors. Lower cost radiosonde models, such as the RS41-D, are equipped with only temperature-, humidity-, and pressure-sensing capabilities [54], while higher end systems, such as the RS41-SGP, can be connected with ozone sensors or other devices that are configured to interface with a standard data communication protocol [55]. Importantly, radiosondes are equipped with highly accurate sensors which are calibrated to global standards, which is why these devices are accepted broadly as the main technology for high-altitude meteorological surveys. Figure 4 depicts both a commercial radiosonde and a scientific CanSat as a point of visual reference.
In addition to containing similar sensor suites, radiosondes and CanSats also share similar flight experiences and characteristics. During a typical CanSat flight, the device experiences three major operational phases. The first phase is the ascent, where the vehicle is subjected to an acceleration which moves it to a higher altitude. The second phase is the separation or deployment, in which the CanSat is mechanically decoupled from the device lifting it to the higher altitude. The final flight phase of the CanSat is the descent. During this phase, the vehicle travels back toward the Earth under the influence of gravitational acceleration. Many CanSats follow flight characteristics similar to radiosondes, particularly during the descent flight phase, when parachutes are often deployed to arrest landing velocities.
By way of comparison, most radiosondes are tethered to weather balloons, which consist of flexible envelopes filled with a gas lighter than air to provide buoyancy. A weather balloon, or other High-Altitude Balloon (HAB), filled with helium can carry a radiosonde to an altitude ranging from 25 to 30 km, before the balloon bursts or is purposely deflated [56]. Following the destruction of the weather balloon, a parachute canopy connected to the radiosonde’s tether typically inflates to slow the device for a softer terrestrial landing. Other less common flight mechanics for radiosondes include variants such as the “RocketSonde” [57], which simply replaces the slow balloon assisted altitude climb with a more rapid rocket assisted ascent, or the “GliderSonde” [58,59], which replaces the parachute assisted descent with a controlled gliding recovery through the application of aerodynamic control surfaces or wings.
CanSats associated with most global competitions follow significantly lower altitude flights than the typical radiosonde, with the US competition targeting altitudes of 670 to 725 m [8], and the European competition describing a maximum drop altitude of 1 km [10]. However, scientific CanSats can exceed the guidelines created for student competitions with flights on weather balloons or rockets that reach the stratosphere much like radiosondes [40]. Regardless of the flight altitude, the recovery techniques employed by these devices represent an important point of commonality. The vast majority of radiosondes employ passive parachute canopies to slow their descent from high altitudes, which is mirrored by the vast majority of both student and scientific CanSats, which also favor the deployment of parachutes for recovery [16,19,23,24].
However, some important distinctions between these two scientific vehicles need to be made. First, CanSats appear to offer greater flexibility in their launch mechanics. While radiosondes are typically either intended for balloon launches or designed for rocket-based deployments, a singular CanSat device can be deployed from a rocket, a balloon, a drone, or by other means [6,10]. Radiosondes are also typically self-contained devices that do not mechanically actuate or deploy secondary sensory devices, which are functionalities that CanSats regularly demonstrate [8,33]. Finally, while commercial radiosondes nearly universally utilize parachutes for recovery, CanSats offer the flexibility to test novel and unconventional recovery techniques, such as auto-gyros [15], deployable wings [48], powered propellers [60], and many others [5,6].
It should be noted that CanSats designed for studying natural phenomena on Earth often exceed the typical capabilities of commercially available radiosondes. While many atmospheric monitoring CanSats utilize simple pressure and temperature sensors, much like radiosondes, the addition of novel instrumentation, such as cameras [19], magnetometers, accelerometers [18], gyroscopes, or luminosity sensors [24], give these devices far more sensory opportunities than a commercial radiosonde. Although CanSat-based measurements may not adhere to global calibration standards, a major benefit to CanSats are their flexible architectures and the ability to utilize Commercial-off-the-Shelf (COTS) hardware for rapid prototyping. This flexibility of design makes CanSats a potentially lower-cost option for localized data collection campaigns [22]. While a radiosonde could be launched to determine local weather conditions, a CanSat might be a significantly cheaper option that includes the added capability of more customizable sensory abilities for the desired scientific study. Having discussed the difference between CanSats and radiosondes, the next section investigates CubeSats in comparison with CanSats.
4.2. CanSats Are Not CubeSats
CanSats and their orbital brethren, the CubeSat, have a close history that has been described at length in a previous section of this review. With this shared history, there also is some overlap that can occur between these two technical frontiers. In particular, there are significant examples of CubeSat technologies being tested through stratospheric launches of High-Altitude Balloons (HABs) and suborbital sounding rockets. These tests are typically targeted at confirming the “technology readiness” of the system by simulating conditions that are similar to space in Earth’s upper atmosphere [61]. CubeSat testing programs organized by the European Space Agency (ESA) that are specifically intended for college students include BEXUS (Balloon EXperiments for University Students) [62] and REXUS (Rocket Experiments for University Students) [63] A comprehensive analysis of terrestrial testing of CubeSat systems is beyond the scope of this review, but a few examples include testing a Software-Defined Radio (SDR) communication architecture [64], the measurement of magnetic field disturbances [65], or the creation of a heat transfer experiment [66].
Notably, some of these devices clearly take the form and architecture of a CubeSat [67], but other HAB-based studies generate devices that might be interpreted as being more similar to CanSats [68]. Furthermore, the use of sounding rockets to test CubeSat architectures is not altogether dissimilar from the use of lower altitude rockets for CanSat competitions. There are also significant examples of simulated satellite devices being tested with HABs without any immediate motivation to integrate tested systems into orbital vehicles. Pawar et al. coin a new term for such devices, calling them “Lower Atmosphere Research Satellites” (LARS) [69]. Functionally, there are very few differences between so called LARS and the developing definition of CanSats. In terms of form, CanSats are generally cylindrical, while the LARS described by Pawar et al. took a more rectangular form that harkened to the standards of a CubeSat. However, from a purely technical perspective, many of these high-altitude studies could be packaged into a cylindrical chassis as easily as a rectangular one, further blurring the line between CanSats and CubeSats.
This overlap also goes the other way. Recent developments have been made on a new standard of orbital picosatellite called the “TubeSat”. Unlike like CubeSats, TubeSats follow a new dimensional standard that calls for a cylindrical chassis design instead of the cubic one utilized by CubeSats. These devices closely resemble stratospheric CanSats, and may therefore represent the logical progression of such devices [70]. Perhaps a CanSat that passes rigorous terrestrial testing could be launched into space and therefore graduate to the status of TubeSat, but additional development will be required to fully articulate any distinction between this new TubeSat standard and the existing standards of CubeSats and CanSats. Figure 5 provides a quick overview of the major differences noted between these devices.
There are also additional picosatellite designs that are much smaller than even a single unit CubeSat. Devices such as PocketQubes follow a 5-cm cube standard, at a maximum mass of 250 g. Being a quarter the size of a typical CubeSat, these devices are also potentially very similar to the smaller CanSat formats, especially Professor Twigg’s original vision of the soda-can-sized satellite. Variations on the PocketQube also include so called “ThinSats”, which are typically picosatellites consisting of a single circuit board. ThinSats are similar in mass to PocketQubes, but are flat like a slice of bread, instead of cube shaped. Importantly, low-cost picosatellites like PocketQubes and ThinSats are primarily intended for academic and educational purposes, much like CanSats [1].
However, it should be abundantly clear from the shape alone that CanSats and CubeSats are separate technological entities. Having been developed at similar times, with similar names, and similar scientific goals, care should be taken to define both devices separately to avoid confusion. Therefore, to make the distinction clear, this review defines a CubeSat as an “artificial satellite or space fairing robotic device that takes the form of a rectangular prism with a standardized shape and dimension”. This definition was developed from the standards and conventions described in [1]. Key to this definition is that, while both CanSats and CubeSats have an abbreviation for “satellite” in their name, only CubeSats constitute true “artificial satellites”, while CanSats represent only “simulated satellites” [22]. This definition aligns well with the historic application of CanSats described previously, as well as modern use cases for CubeSats [1]. Furthermore, with this major difference between CubeSats and CanSats identified, a more formal technical definition can be articulated.
4.3. Developing a Technical Definition
The core technical definition for what constitutes a CanSat must start with the vision and intents at its creation, namely, when Professor Twiggs declared that a micro-scale satellite could be constructed from a soda can. Following the 1998 USSS conference, students at the University of Tokyo continued to build and fly CanSats, under the direction of Professor Shinici Nakasuka [1]. This process of designing a complex system composed of microcontrollers, sensors, batteries, communication systems, and more provided valuable hands-on experience for the students. Indeed, the Space Systems Development Laboratory at Stanford University, of which Professor Twiggs was a member, maintained a key goal of involving students in the process of creating small-scale satellites. Therefore, Twigg’s vision, and much of the historic application of CanSats, can be described succinctly as “educational satellite analogues”.
The educational relevance of CanSats represents the first key pillar of any definition, especially as the use of CanSats as instructional tools continues to be leveraged by institutions across the globe. Competitions based on the CanSat architecture have been held in Europe [10,14], Japan [4], and the United States [1], to name a few. These events continue to challenge students through Science, Technology, Engineering, and Math (STEM) oriented curriculum, while also encouraging students to engage problem-solving skills and to demonstrate technical know-how. The CanSat as an educational tool and vector for student learning must then be a part of its definition.
Another element of the technical definition should reside in the flight characteristics of CanSats. Some accounts suggest that Twiggs fully intended to have these soda can satellites launched into orbit [6], while others indicate the payloads were always bound for suborbital applications [1]. However, the reality was that the CanSats developed following the 1998 USSS conference were never sent into orbit [6]. Modern student competitions and the ultimate outcome of that 1998 USSS Conference pivoted toward suborbital launches to make the competitions affordable and accessible to student organizations. The first launches of these devices obtained altitudes of 3.6 km, thanks to high-powered amateur rocket [6]; however, many modern competitions maintain less lofty goals with launches aimed at closer to 700 m [8]. However, while CanSat competitions typically limit launch apogees to the troposphere, scientific studies have demonstrated the ability to launch CanSats to as high as the stratosphere using High-Altitude Balloons [26]. In all cases, both competition and general scientific CanSats maintain suborbital trajectory. Therefore, the non-orbital nature of a CanSat must be another pillar of the forthcoming technical definition.
For CanSats to distinguish themselves as unique mechatronic devices, they must be separated clearly from other existing systems with similar operational parameters. As discussed at the start of this section, there are two devices in particular that present the greatest areas for comparison, namely CubeSats and radiosondes. The distinction between CanSats and CubeSats is most clearly described as a function of altitude and trajectory. CubeSats are launched into space [65] and act as artificial satellites of the Earth or other celestial bodies [1], while CanSats are most often launched to altitudes below 4 km with no intent for the vehicle to reach space or maintain an orbit [9]. Furthermore, even the highest launching CanSats, which can reach the stratosphere, still never reach space or maintain an orbit [40]. This fact must therefore distinguish CubeSats from modern CanSats: they stay within Earth’s atmosphere and do not reach orbit.
Another distinct difference between CanSats and CubeSats is their shape. CubeSats maintain a very strict dimensional standard to ensure compatibility with launchers [3]. Hence the names; CubeSats are cubes, while CanSats generally are cylinders. The size and shape of CanSats is also not as standardized as CubeSats. The original 350 milliliter aluminum soda can is a common size standard employed by some researchers [6]; however, other competitions have created new standards that are much larger than this original specification [8]. In most cases, the cylindrical shape is maintained to ensure compatibility with a variety of launching vehicles; however, this shape is often a maximum size envelope, not a required dimensional characteristic. Since the size and shape of CanSats appears to be very flexible, this flexibility must be important to a final technical definition.
Next, to distinguish CanSats from radiosondes and other meteorological sounding instruments, the comparisons made in the previous section will be referred to further. Foremost, CanSats are distinct from radiosondes by their flexible scientific goals. Radiosondes are solely intended for meteorological and atmospheric surveys [55], while CanSats can engage Earth studies, but can also be developed for subjects as varied as aeronautics to student education. As a hallmark of this varied scientific capability, CanSats also demonstrate significantly different flight characteristics than atmospheric sounding systems. Most radiosondes are carried to the stratosphere below an inflatable balloon before deploying a parachute for an unguided descent to the ground. While this framework is not dissimilar from some CanSat flights, the flexible shape and size of CanSat payloads make them equally capable of being launched from balloons, rockets, aircraft, and many other mechanisms.
Compiling all these characteristics together, the final technical definition follows: a CanSat is both an educational and scientific tool that is used terrestrially to learn about and test hardware for space-bound systems; where flexible launch characteristics, size, shape, and sensory abilities allow CanSats to be leveraged for low-cost studies in a variety of scientific fields and disciplines.
5. Future Directions
Having established common use cases for CanSats in the Application section of this paper, and having established a technical definition for what constitutes a CanSat in the previous section, some considerations for the future of this technological frontier will be articulated in this section. As a starting point, traditional CubeSat architectures have been explored briefly as a point of comparison for CanSats. However, it is significant to note that satellites in general can have a plethora of operational parameters and mission profiles. This further complicates distinguishing between CanSats as satellite simulation tools and experimental satellites that operate outside of traditional parameters. One such example of a highly experimental satellite classification that further blurs the line between CanSat and a satellite would be the orbital vehicles operating in exceptionally low orbits.
There is no clear delineation between Earth’s atmosphere and space. However space is often said to begin at 100 km above sea level [67]. Many low-cost satellites, such as CubeSats, are placed in Low Earth Orbits (LEO), which are generally defined as orbital altitudes varying from 200 to 2000 km. Importantly, vehicles in LEO still interact with Earth’s atmosphere, especially at altitudes below 500 km, where air resistance begins to become a significant factor in determining orbital duration. This lower orbital altitude, where atmospheric drag is prevalent, is called Very Low Earth Orbit (VLEO), and is typically defined as orbital altitudes below 450 km. Due to the effects of air resistance, satellites in VLEO may deorbit in less than 5 years, depending on their area and mass [71]. While this short orbital lifespan and the lower cost of launching vehicles to VLEO makes it a great altitude for experimental satellites such as CubeSats, serious interest in making this space more economically viable for other forms of commercial satellites is also under consideration.
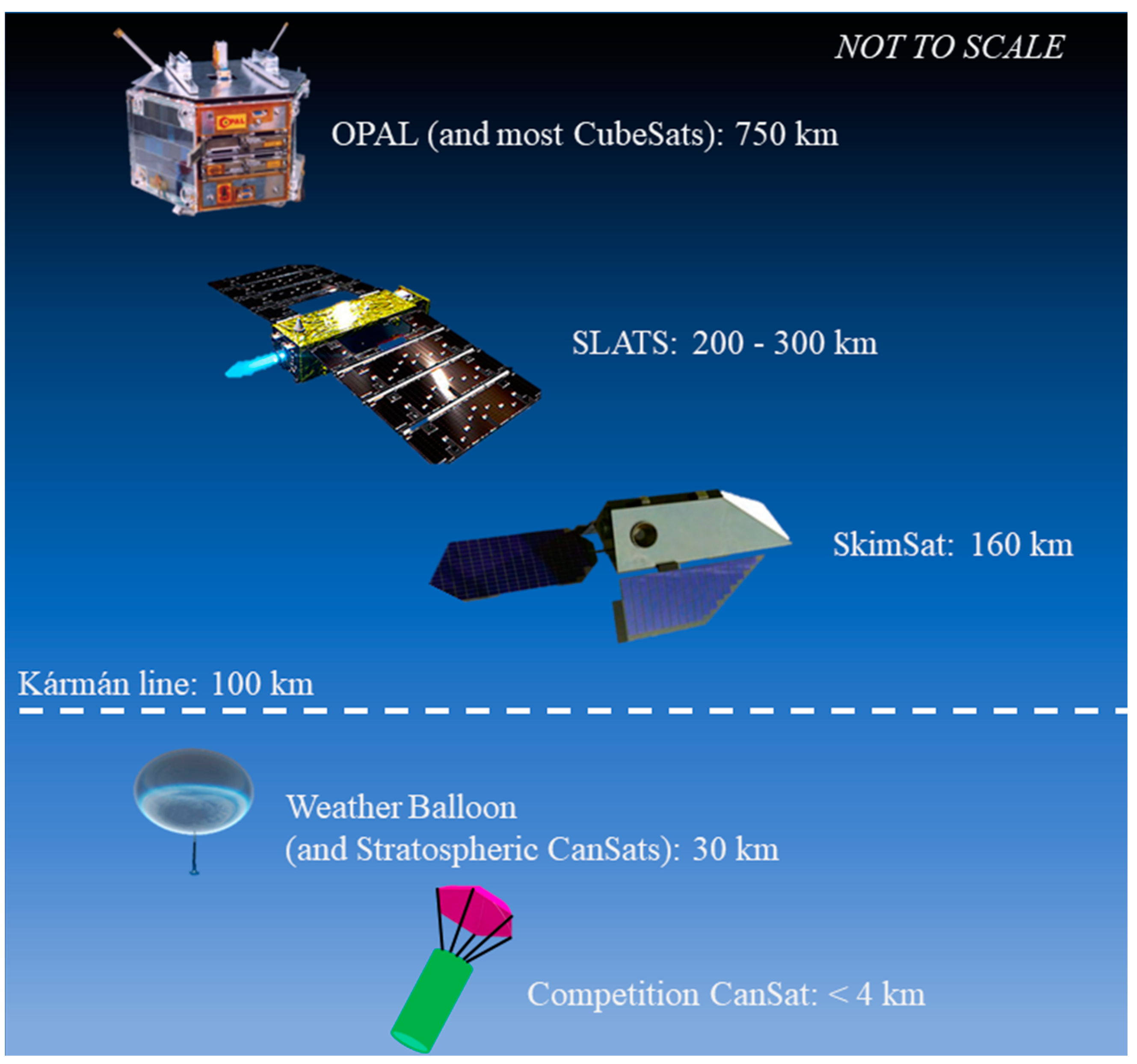
The Super Low Altitude Test Satellite (SLATS), developed by the Japan Aerospace Exploration Agency (JAXA) is targeting operations in “Super Low Altitudes” between 200 and 300 km. Extended presence in altitudes this low can only be accomplished by significant changes in the design of the satellite. Foremost, the satellite was designed to be more aerodynamic in shape, having a smaller cross-sectional area in the forward direction. Additionally, the SALTS was equipped with an ion engine to provide propulsive thrust for maintaining its low orbit and countering aerodynamic drag [72]. The United Kingdom branch of Thales Alenia Space, an aerospace company, has proposed pushing satellites even lower to altitudes of 160 km with their new “SkimSat” [73]. Unlike traditional satellites, the SkimSat concept employs an aerodynamic body with a “novel air-breathing propulsion system”. The design goals of SkimSat were also influenced by a desire to combine the best characteristics of both orbital Earth Observation (EO) and Unmanned Aerial Vehicles (UAVs) [74]. This combination of technologies designed to operate within Earth’s atmosphere, namely UAVs, with systems traditionally operating above Earth’s atmosphere, namely orbital satellites, has generated a proposed architecture that resembles a satellite with wings. Figure 6 compares the altitude of traditional satellites and SkimSats to weather balloons and CanSats.
As the technical definition developed during this review clearly defines CanSats as devices operating within Earth’s atmosphere, this definition could conceivably encompass recently developing VLEO satellite architectures, if atmospheric density is considered instead of international convention. SkimSats might indeed be determined to be a subsect of CanSats; however, this new field of atmosphere skimming satellites requires additional time to mature before such categorizations can be made. With SkimSats investigating a scientific area that combines both orbital and atmospheric technology spaces, CanSat architectures could surely offer a low-cost architecture for testing future SkimSat systems. CanSats equipped with prototype, optical sensors, advanced aerodynamic material coatings, or even prototype air-breathing engines, could be very useful in SkimSat-related studies. Just as CanSats were a critical technological precursor for orbital CubeSats, CanSats may also be an important prerequisite experimental platform for developing SkimSats.
On the other end of the continuum might be satellite-like systems that operate in the stratosphere with High-Altitude Balloons (HABs). The use of HAB-based testing for both CubeSat and CanSat architecture has been previously described in other sections of this review. However, the deployment of dedicated satellite-like devices in the stratosphere could see potential advances garnered from CanSat architectures. A well-known case study of such devices might be the so called “Loon Balloons” developed by Google. These High-Altitude Balloons were intended to provide low-cost cellular connectivity to areas that did not have dedicated terrestrial cell towers [75]. While this project has since been abandoned by Google, future systems employing similar architectures could also utilize CanSats as part of their research pipeline. At the start of such a research pipeline, the CanSat architecture could be a valuable tool for varied duration testing of new technology or systems integration. CanSats launched into the stratosphere on sounding rockets could perform low-cost and short duration tests, while CanSats attached to HABs could conduct long-duration validation of future flight systems.
Another intriguing area for development in the CanSat paradigm is that of active aerodynamic guidance and control. Most HAB-based experiments are completely uncontrolled during the entire mission duration, leaving the payload’s position at the whims of atmospheric air currents [56]. Google’s Loon architecture attempted to offer some controllability to their HAB payloads by changing their altitude to correspond with desirable wind currents, but analysis of this strategy suggest only coverage gains of less than 10% when compared to purely random deployment of their balloons [75]. Perhaps CanSats equipped with large aerodynamic surfaces could offer additionally rudimentary control at high altitudes, or certainly active aerodynamic guidance during the descent stage of the mission. As part of the greater research pipeline, the ability for a scientific payload to fly itself back to some desired landing site could significantly reduce turnaround time, and all but eliminate the need to perform time-consuming recovery efforts for the payload.
6. Conclusions
As one of the final unexplored frontiers, space remains an important area for continued scientific advancement. The advent of low-cost picosatellites and, in particular, CubeSats, has significantly reduced barriers for private and academic organizations to access space technologies. However, a holistic technology pipeline for future extraplanetary robotic exploration may begin with devices that are even easier to design and deploy than CubeSats. As educational satellite analogues, the CanSat provides a means for students, educators, and industry to test both their comprehension of space-bound technology, and also to trial advanced new technologies that have yet to be proven in orbit. Although CanSats do not leave Earth’s atmosphere or achieve orbit, they can still be used to simulate many of the characteristics and circumstances of an orbital picosatellite. Moreover, their sub-orbital flight characteristics makes this technology frontier far more accessible and flexible to operate than orbital CubeSats. While some CanSats may share scientific goals with meteorological radiosondes, CanSats can also branch into disciplines beyond Earth sciences, such as aeronautics, wireless communication, and education, to name just a few. In the future, CanSats may also become more relevant as organizations develop fledgling aerospace programs, or as additional interest develops for low orbiting satellites. However, the educational opportunities for CanSats will likely be their most lingering contribution to the exploration of space, as many former and future students who look to stars may do so, in part, thanks to CanSats.
Author Contributions
Conceptualization, M.H.T. and C.C.; methodology, C.C.; investigation, C.C.; software, C.C.; writing—original draft preparation, C.C.; writing—review and editing, C.C.; supervision, M.H.T.; project administration, M.H.T. and S.C.; All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Acknowledgments
This research effort was supported by the Kennesaw State University (KSU) Departments of Robotics and Mechatronics in addition to the Graduate College at KSU. The authors would also like to thank Sandra Kuhn-Chun for her feedback and review of this work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Cappelletti, C.; Battistini, S.; Malphrus, B.K. (Eds.) CubeSat Handbook: From Mission Design to Operations; Academic Press is an imprint of Elsevier: London, UK; San Diego, CA, USA, 2021; ISBN 978-0-12-817884-3. [Google Scholar]
- Soyer, S. Small space can: CanSat. In Proceedings of the 5th International Conference on Recent Advances in Space Technologies—RAST2011, Istanbul, Turkey, 9 June 2011; pp. 789–793. [Google Scholar]
- Twiggs, R. Space engineering—Project based learning by working real space programs. In Proceedings of the American Society of Engineering Educators Annual Conference, American Society of Engineering Educators, Montreal, QC, Canada, 16 June 2002; p. 10. [Google Scholar]
- Colin, A. A Pico-Satellite Assembled and Tested during the 6th CanSat Leader Training Program. J. Appl. Res. Technol. 2017, 15, 83–91. [Google Scholar] [CrossRef] [Green Version]
- Sako, N.; Tsuda, Y.; Ota, S.; Eishima, T.; Yamamoto, T.; Ikeda, I.; Ii, H.; Yamamoto, H.; Tanaka, H.; Tanaka, A.; et al. Cansat suborbital launch experiment—University educational space program using can sized pico-satellite. Acta Astronaut. 2001, 48, 767–776. [Google Scholar] [CrossRef]
- Khali, M.; Miyazaki, Y. (Eds.) CanSat Pico Size Artificial Satellite, 4th ed.; University Space Engineering Consortium: St. Gallen, Switzerland, 2017. [Google Scholar]
- U.S. Naval Research Laboratory. What Is CanSat? U.S. Naval Research Laboratory: Washington, DC, USA, 2011. [Google Scholar]
- American Astronautical Society. CanSat Competition Guide 2023; American Astronautical Society: Springfield, VA, USA, 2022. [Google Scholar]
- Walker, R.; Galeone, P.; Page, H.; Castro, A.; Emma, F.; Callens, N.; Ventura-Traveset, J. ESA Hands-on space education project activities for university students: Attracting and training the next generation of space engineers. In Proceedings of the IEEE EDUCON 2010 Conference, Madrid, Spain, 14 April 2010; pp. 1699–1708. [Google Scholar]
- European Space Agency. CANSAT: 2022–2023 Guidelines; European Space Agency: Paris, France, 2023. [Google Scholar]
- Chancharoen, W.; Witoon, S.; Pataranutaporn, P.; Ngamarunchot, B.; Theanthong, P. The national cansat competition: Lessons, challenges and outcomes of the first cansat competition in thailand. In Proceedings of the 69th International Astronautical Congress (IAC), Bremen, Germany, 1–5 October 2018. [Google Scholar] [CrossRef]
- Hasan Raian, F.M.T.; Islam, H.M.J.; Islam, M.S.; Azam, R.; Islam, H.M.J.; Debnath, S. An Affordable CanSat Design and Implimentation to Study Space Science for Bangladeshi Students. In Proceedings of the 2020 IEEE Region 10 Symposium (TENSYMP), Dhaka, Bangladesh, 5 June 2020; pp. 1205–1208. [Google Scholar]
- Aly, H.; Sharkawy, O.; Nabil, A.; Yassin, A.; Tarek, M.; Amin, S.M.; Ibrahim, M.K. Project-based space engineering education: Application to autonomous rover-back CanSat. In Proceedings of the 2013 6th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 12 June 2013; pp. 1087–1092. [Google Scholar]
- Contente, J.; Galvão, C. STEM Education and Problem-Solving in Space Science: A Case Study with CanSat. Educ. Sci. 2022, 12, 251. [Google Scholar] [CrossRef]
- Ramadhan, R.P.; Ramadhan, A.R.; Putri, S.A.; Latukolan, M.I.C.; Kusmadi, E. Prototype of CanSat with auto-gyro payload for small satellite education. In Proceedings of the 2019 IEEE 13th International Conference on Telecommunication Systems, Services and Applications (TSSA), Bali, Indonesia, 3 October 2019; pp. 243–248. [Google Scholar]
- Ames-Lizarbe, J.A.; Bala-Romero, B.L.; Cortez-Reategui, R.E.; Espillco-Luicho, M.A.; Leon-Nunez, R.F.; Solis-Alvites, S.G.; Roman-Gonzalez, A. INCAnSat: CanSat for Education and Environmental Monitoring. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 43–50. [Google Scholar] [CrossRef]
- Eerkens, R.; Van Breukelen, E.; Verhoeven, C.; Vollebregt, S.; Fitié, A. The dutch cansat competition: How 350 secondary school pupils compete to build the most innovatibe “satellite” in a soda can. In Proceedings of the 59th International Astronautical Congress: IAC 2008, IAF, Glasgow, Scotland, 29 September–3 October 2008; pp. 1–8. [Google Scholar]
- Ghazanfarinia, S.; Jazebizadeh, H.; Simard, M.; Bakhtiari Mojaz, S.; Ahmadi, G. ARIC-2: Lightest Atmospheric Sounding Cansat; Aerospace Research Institute: Tehran, Iran, 2011. [Google Scholar]
- Islam, T.; Noureen, A.; Mughal, M.R.; Nadeem, M.A. Design and development of a weather monitoring satellite, CanSat. In Proceedings of the 2019 15th International Conference on Emerging Technologies (ICET), Peshawar, Pakistan, 2 December 2019; pp. 1–6. [Google Scholar]
- Yarce Botero, A.; Lopez Restrepo, S.; Sebastian Rodriguez, J.; Valle, D.; Galvez-Serna, J.; Montilla, E.; Botero, F.; Henzing, B.; Segers, A.; Heemink, A.; et al. Design and Implementation of a Low-Cost Air Quality Network for the Aburra Valley Surrounding Mountains. Pollutants 2023, 3, 150–165. [Google Scholar] [CrossRef]
- Chodkaveekityada, P. CanSat design and their applications. In Proceedings of the 2018 SpaceOps Conference, Marseille, France, 28 May 2018; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018. [Google Scholar]
- Gopal, G.; Harith, B.; Ritwik, R.; Savyasachi, J.; Chetan, U. Weather Monitoring Using Parachute Satellite-CanSat. Int. J. Eng. Sci. Comput. 2016, 6, 5181–5184. [Google Scholar] [CrossRef]
- Hasan, M.; Rahman, I.I.; Hossam-E-Haider, M.; Shah Sadman, A.A.M. Design of CanSat for environmental monitoring and object detection. In Proceedings of the 2021 5th International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Dhaka, Bangladesh, 18 November 2021; pp. 1–6. [Google Scholar]
- Faroukh, Y.M.; Mohamed Abdelkarim AL-Ali, A.A.; Adwan, A.O.; Alhammadi, A.; Shaikh, M.M.; Faroukh, A.M.; Femini, I. Environmental monitoring using CanSat. In Proceedings of the 2019 6th International Conference on Space Science and Communication (IconSpace), Johor Bahru, Malaysia, 28 July 2019; pp. 239–244. [Google Scholar]
- Bhad, B.; Akant, K. Experimental cansat for measurment of UV radiation. In Proceedings of the 2019 9th International Conference on Emerging Trends in Engineering and Technology—Signal and Information Processing (ICETET-SIP-19), Nagpur, India, 1 November 2019; pp. 1–4. [Google Scholar]
- Colin, A.; Jimenez-Lizárraga, M. The CanSat technology for climate monitoring in small regions at altitudes below 1 km. In Proceedings of the Designing Solutions: Concepts, Enabling Technologies and Operational Constraints, Mexico City, Mexico; Available online: Researchgate.net (accessed on 1 June 2023).
- American Astronautical Society. CanSat Competition Guide 2019; American Astronautical Society: Springfield, VA, USA, 2018. [Google Scholar]
- American Astronautical Society. CanSat Competition Guide 2022; American Astronautical Society: Springfield, VA, USA, 2021. [Google Scholar]
- Ventura, A.; Nuñez-Quispe, J.; Sanchez, G.; Santivañez, J. CanSat Payload with Autogyro for Descent in Experimental Rocket Flights: Development, CFD Analysis and Preliminary Test on Free-Fall. J. Phys. Conf. Ser. 2022, 2235, 012055. [Google Scholar] [CrossRef]
- Shukla, P.; Mishra, R.; Sardar, U.A.; Mohapatra, B. Satellite design for CANSAT with autorotatig payloads. In Proceedings of the 2022 4th International Conference on Advances in Computing, Communication Control and Networking (ICAC3N), Greater Noida, India, 16 December 2022; pp. 2385–2392. [Google Scholar]
- American Astronautical Society. CanSat Competition Guide 2017; American Astronautical Society: Springfield, VA, USA, 2016. [Google Scholar]
- American Astronautical Society. CanSat Competition Guide 2020; American Astronautical Society: Springfield, VA, USA, 2019. [Google Scholar]
- Aliyev, I.; Misirli, C.A.; Ozturk, S.; Mahmurat, E.; Erkek, A.; Kok, S.; Kocyigit, D.; Uzun, S.; Vural, R.A. Design of solar powered subscale glider for CanSat competition. In Proceedings of the 2017 8th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 19 June 2017; pp. 453–457. [Google Scholar]
- Kizilkaya, M.O.; Oguz, A.E.; Soyer, S. CanSat descent control system design and implementation. In Proceedings of the 2017 8th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 19 June 2017; pp. 241–245. [Google Scholar]
- Pradhan, E.; Dadheech, A.; Agarwal, H.; Singh, T.; Singari, R.M. India Design Concept of a Model Can-Sized Sub-Orbital Satellite. J. Eng. Res. 2021, 79, 88. [Google Scholar] [CrossRef]
- Songul, G.; Yalman, A.; Ilginoglu, A.; Gokce, A.; Koculu, O.E.C.; Kirli, A.; Koru, A.T.; Tufekci, C.S. Model picosatellite design for energy harvesting and telemetry data transmission through RF communication. In Proceedings of the 2015 7th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 16 June 2015; pp. 839–844. [Google Scholar]
- Cheong, J.W.; Southwell, B.J.; Andrew, W.; Aboutanios, E.; Lam, C.; Croston, T.; Li, L.; Green, S.; Kroh, A.; Glennon, E.P.; et al. A Robust Framework for Low-Cost Cubesat Scientific Missions: In-Orbit Recovery, Results and Lessons Learned from UNSW-EC0. Space Sci. Rev. 2020, 216, 8. [Google Scholar] [CrossRef]
- Chua, H.C.; Jay Flores, C.; Padilla, A.G.; Dale Ambatali, C. Design and implementation of a low cost amateur radio unit for cube satellites. In Proceedings of the 2019 IEEE Asia-Pacific Conference on Applied Electromagnetics (APACE), Melacca, Malaysia, 25 November 2019; pp. 1–6. [Google Scholar]
- Salvatus, J.; Constante, M.A.; Violan, E.P.; Salces, A.; Paet, L.B.; Talampas, M.C.; Marciano, J.S. Development of deployable antennas for the diwata-2 microsatellite’s amateur radio payload. In Proceedings of the 2017 IEEE International Conference on Communication, Networks and Satellite (Comnetsat), Semarang, Indonesia, 5 October 2017; pp. 26–31. [Google Scholar]
- Rodríguez, J.S.; Botero, A.Y.; Valle, D.; Serna, J.G.-; Botero, F. Experimental Approach for the Evaluation of the Performance of a Satellite Module in the CanSat Form Factor for In Situ Monitoring and Remote Sensing Applications. Int. J. Aerosp. Eng. 2021, 2021, 1–28. [Google Scholar] [CrossRef]
- Aydemir, M.E.; Dursun, R.C.; Pehlevan, M. Ground station design procedures for CANSAT. In Proceedings of the 2013 6th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 12 June 2013; pp. 909–912. [Google Scholar]
- Ehikhamenle, M.; Omijeh, B.O. Design and Implementation of CanSat (A Pico–Satellite). Int. J. Sci. Eng. Investig. 2017, 6, 106–111. [Google Scholar]
- Sreenivasaraja, N.; Raj, J.J.J.; Nandhagobalan, B.; Kavin, S. Design and Fabrication of Advance Level CANSAT Used for Measuring the Atmospheric Parameters and GPS Tracking System. Int. J. Sci. Adv. Res. Technol. 2018, 4, 1264–1269. [Google Scholar]
- Joseph Nunez-Quispe, J. Design and simulation of a rover cansat non-pneumatic wheel: Preliminary study for a certain test obstacle path. In Proceedings of the 2021 12th International Conference on Mechanical and Aerospace Engineering (ICMAE), Athens, Greece, 16 July 2021; pp. 484–488. [Google Scholar]
- Akiyama, M.; Ninomiya, H.; Saito, T. Method to Achieve High Speed and High Recognition Rate of Goal from Long Distance for CanSat. J. Robot. Mechatron. 2023, 35, 194–205. [Google Scholar] [CrossRef]
- Celebi, M.; Ay, S.; Ibrahim, M.K.; Aydemir, M.E.; Bensaada, M.; Fernando, L.; Akiyama, H.; Yamaura, S. Design and navigation control of an advanced level CANSAT. In Proceedings of the 5th International Conference on Recent Advances in Space Technologies—RAST2011, Istanbul, Turkey, 9 June 2011; pp. 752–757. [Google Scholar]
- Aydemir, M.E.; Celebi, M.; Ay, S.; Vivas, E.V.; Calle Bustinza, F.; Phan, D. Design and implementation of a rover-back CANSAT. In Proceedings of the 5th International Conference on Recent Advances in Space Technologies—RAST2011, Istanbul, Turkey, 9 June 2011; pp. 800–803. [Google Scholar]
- Umit, M.E.; Cabanas, W.; Tetlow, M.; Akiyama, H.; Yamaura, S.; Olaleye, S. Development of a fly-back CANSAT in 3 weeks. In Proceedings of the 5th International Conference on Recent Advances in Space Technologies—RAST2011, Istanbul, Turkey, 9 June 2011; pp. 804–807. [Google Scholar]
- Ostaszewski, M.; Dzierzek, K.; Magnuszewski, L. Analysis of data collected while CanSat mission. In Proceedings of the 2018 19th International Carpathian Control Conference (ICCC), Szilvasvarad, Hungary, 28 May 2018; pp. 1–4. [Google Scholar]
- Abo-Arais, M.; Elfeki, M.; Mohammed, A.; El-Mohr, M.; Abdelmoteleb, B.; Hatem, A.; Mohamed, A.-B.; Ramy, A.; Walid, K.; El-Fiky, M.; et al. Approaching a nano-satellite using CAN-SAT systems. In Proceedings of the 2015 7th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 16 June 2015; pp. 813–817. [Google Scholar]
- Svensson, A. Atmospheric Measurement Using CanSat; Mid Sweden University: Östersund, Sweden, 2020; p. 43. [Google Scholar]
- Soltani, M.M.; Khanmirza, E.; Mohammadi, E.; Navid, N.S.H. A new framework for design and development imaginary CanSat. In Proceedings of the 14th International Conference of Iranian Aerospace Society, Tehran, Iran, 25–27 March 2015; Iranian Research Organization for Science and Technology: Tehran, Iran, 2015. [Google Scholar]
- Radiosonde RS41-SG 2017; Vaisala: Vantaa, Finland, 2017.
- Radiosonde RS41-D 2017; Vaisala: Vantaa, Finland, 2017.
- Radiosonde RS41-SGP 2020; Vaisala: Vantaa, Finland, 2020.
- Gemignani, M.; Marcuccio, S. Dynamic Characterization of a High-Altitude Balloon during a Flight Campaign for the Detection of ISM Radio Background in the Stratosphere. Aerospace 2021, 8, 21. [Google Scholar] [CrossRef]
- Baynton, H.W. AN/AMQ-15 Rocketsonde Tests at White Sands Proving Ground. Bull. Am. Meteorol. Soc. 1961, 42, 34–41. [Google Scholar] [CrossRef] [Green Version]
- Lafon, T.; Fowler, J.; Jiménez, J.F.; Cordoba, G.J.T. A Viable Alternative for Conducting Cost-Effective Daily Atmospheric Soundings in Developing Countries. Bull. Am. Meteorol. Soc. 2014, 95, 837–842. [Google Scholar] [CrossRef] [Green Version]
- Kräuchi, A.; Philipona, R. Return Glider Radiosonde for in Situ Upper-Air Research Measurements. Atmospheric Meas. Tech. 2016, 9, 2535–2544. [Google Scholar] [CrossRef] [Green Version]
- Bulut, S.N.; Gul, M.; Beker, C.; Ipek, I.I.; Koculu, O.E.C.; Topaloglu, C.; Dincer, N.; Kirli, A.; Ertugrul, H.F.; Tufekci, C.S. Model satellite design for CanSat competition. In Proceedings of the 2013 6th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 12 June 2013; pp. 913–917. [Google Scholar]
- Ticona Coaquira, F.J.; Richard Diaz Palacios, F.; Vidaurre Torrez, K.W.; Ricardo Conchari Cabrera, C.; Valda Penaranda, J.D.; Alejandro Condori Machaca, J. Main analysis for the disturbance torques over the Altiplano region for 1U CubeSat Nadir earth pointing. In Proceedings of the 2022 IEEE Andescon, Barranquilla, Colombia, 16 November 2022; pp. 1–7. [Google Scholar]
- Hall, H.; Chamieh, M.; Chu, J.; Daruwala, R.; Duong, V.; Holt, S.; Jeong, D.; Lally, M.; Nguyen, L.; Rafizadeh, R.; et al. Utilizing high altitude balloons as a low-cost CubeSat test platform. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7 March 2020; pp. 1–11. [Google Scholar]
- Carreno-Luengo, H.; Camps, A.; Querol, J.; Forte, G.; Onrubia, R.; Diez, R. A stratospheric balloon GNSS-R experiment: The 3Cat-2 project in DLR/SNSB BEXUS. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13 July 2014; pp. 3626–3629. [Google Scholar]
- Pont, B.; Beurskens, J.; Dalderup, J.; Dolron, P.; Gubbels, J.; Hörandel, J.R.; Jordans, R.; Pourshaghaghi, H.; Szálas-Motesiczky, D.; Van Vliet, T.; et al. REXUS-25 rocket flight of a CubeSat cosmic-ray detector. In Proceedings of the 36th International Cosmic Ray Conference—PoS (ICRC2019), Madison, WI, USA, 22 July 2019; p. 124. [Google Scholar]
- Lovdahl, B. Software-Defined Radio Payload Design for Cubesat and X-Band Communications; Naval Postgraduate School: Monterey, CA, USA, 2018. [Google Scholar]
- González-Bárcena, D.; Peinado-Pérez, L.; Fernández-Soler, A.; Pérez-Muñoz, Á.G.; Álvarez-Romero, J.M.; Ayape, F.; Martín, J.; Bermejo-Ballesteros, J.; Porras-Hermoso, Á.L.; Alfonso-Corcuera, D.; et al. TASEC-Lab: A COTS-Based CubeSat-like University Experiment for Characterizing the Convective Heat Transfer in Stratospheric Balloon Missions. Acta Astronaut. 2022, 196, 244–258. [Google Scholar] [CrossRef]
- Lay, K.S.; Li, L.; Okutsu, M. High Altitude Balloon Testing of Arduino and Environmental Sensors for CubeSat Prototype. HardwareX 2022, 12, e00329. [Google Scholar] [CrossRef]
- Wijanto, H.; Syihabuddin, B.; Prasetyo, A.D.; Gautama, Y.; Khrisna, I.; Mardiansyah, G. A Preliminary design and testing of the On Board Data Handling (OBDH) for nano-satellite using an atmospheric balloon. In Proceedings of the 2015 1st International Conference on Wireless and Telematics (ICWT), Manado, Indonesia, 17 November 2015; pp. 1–6. [Google Scholar]
- Pawar, P.; Pawar, A.; Valvi, A.; Gite, R. Lower Atmosphere Research Satellite (LARS). Int. Res. J. Eng. Technol. 2017, 4, 2133–2138. [Google Scholar]
- Antunes, S. DIY Satellite Platforms; O’Reilly: Beijing, China; Sebastopol, Ukraine, 2012; ISBN 978-1-4493-1060-8. [Google Scholar]
- Llop, J.V.; Roberts, P.C.; Hao, Z.; Tomas, L.R.; Beauplet, V. Very Low Earth Orbit Mission Concepts for Earth Observation: Benefits and Challenges; Springer: London, UK, 2014. [Google Scholar]
- Kawasaki, H.; Konoue, K.; Hoshino, H.; Kaneko, Y.; Sasaki, M. Interim report of super low altitude satellite operation. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22 July 2018; pp. 4066–4069. [Google Scholar]
- Williamson, M. Aerospace America; AIAA: Reston, VA, USA, 2015; p. 9. [Google Scholar]
- Bacon, A.; Olivier, B. Skimsats: Bringing down the cost of earth observation. In Proceedings of the 12th Reinventing Space Conference, 2017; Hatton, S., Ed.; Springer International Publishing: Cham, Switzerland, 27 December 2016; pp. 1–7. ISBN 978-3-319-34023-4. [Google Scholar]
- Serrano, P.; Gramaglia, M.; Mancini, F.; Chiaraviglio, L.; Bianchi, G. Balloons in the Sky: Unveiling the Characteristics and Trade-Offs of the Google Loon Service. IEEE Trans. Mob. Comput. 2023, 22, 3165–3178. [Google Scholar] [CrossRef]
Figure 1.
OPAL microsatellite [3], reproduced with permission from ASEE (2002).
Figure 1.
OPAL microsatellite [3], reproduced with permission from ASEE (2002).

Figure 2.
Rendering of Low-cost Air Quality Monitoring CanSat as seen from two angles, licensed under Creative Commons by [20].
Figure 2.
Rendering of Low-cost Air Quality Monitoring CanSat as seen from two angles, licensed under Creative Commons by [20].

Figure 3.
Stratosphere CanSat being tested near space, licensed under Creative Commons by [40].
Figure 3.
Stratosphere CanSat being tested near space, licensed under Creative Commons by [40].

Figure 4.
Vaisala RS92-DL radiosonde (Left) compared to a meteorological CanSat (Right).
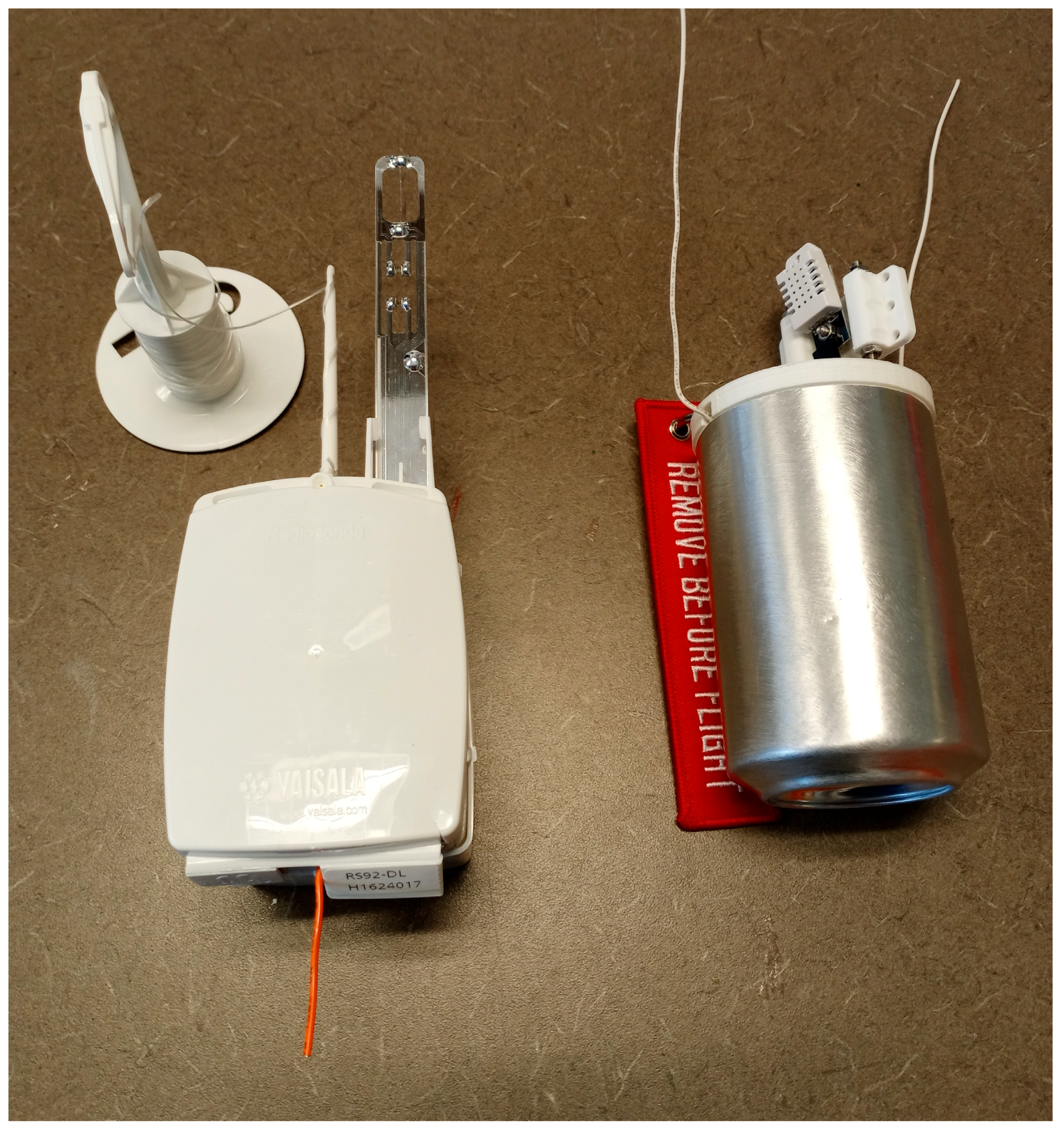
Figure 5.
A broad comparison of CubeSat, CanSat, and TubeSat; images accessed on 17 May 2023.

Figure 6.
Visual altitude comparison of CanSats and satellites.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Chun, C.; Tanveer, M.H.; Chakravarty, S. The CanSat Compendium: A Review of Scientific CanSats. Machines 2023, 11, 675. https://doi.org/10.3390/machines11070675
AMA Style
Chun C, Tanveer MH, Chakravarty S. The CanSat Compendium: A Review of Scientific CanSats. Machines. 2023; 11(7):675. https://doi.org/10.3390/machines11070675
Chicago/Turabian StyleChun, Carrington, M. Hassan Tanveer, and Sumit Chakravarty. 2023. "The CanSat Compendium: A Review of Scientific CanSats" Machines 11, no. 7: 675. https://doi.org/10.3390/machines11070675
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.