
A Survey on Path Planning for Autonomous Ground Vehicles in Unstructured Environments


1
Key Laboratory of CNC Equipment Reliability, Ministry of Education, School of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China
2
School of Computer Science and Engineering, Changchun University of Technology, Changchun 130012, China
*
Authors to whom correspondence should be addressed.
Machines 2024, 12(1), 31; https://doi.org/10.3390/machines12010031
Submission received: 28 November 2023
/
Revised: 29 December 2023
/
Accepted: 30 December 2023
/
Published: 2 January 2024
(This article belongs to the Special Issue New Trends in Robotics and Automation)
Abstract
:Autonomous driving in unstructured environments is crucial for various applications, including agriculture, military, and mining. However, research in unstructured environments significantly lags behind that in structured environments, mainly due to the challenges posed by harsh environmental conditions and the intricate interactions between vehicles and terrains. This article first categorizes unstructured path planning into hierarchical and end-to-end approaches and then the special parts compared to structured path planning are emphatically reviewed, such as terrain traversability analysis, cost estimation, and terrain-dependent constraints. This article offers a comprehensive review of the relevant factors, vehicle–terrain interactions, and methods of terrain traversability analysis. The estimation methods of safety cost, energy cost, and comfort cost are also emphatically summarized. Moreover, the constraints caused by the limits of terrains and vehicles are discussed. The applications of algorithms in recent articles for path planners are reviewed. Finally, crucial areas requiring further research are analyzed in unstructured path planning.
1. Introduction
In recent years, significant advancements have been made in autonomous driving technology, with notable breakthroughs and accomplishments in perception, planning, and control in structured environments [1,2,3]. However, despite these achievements, the progress in dealing with unstructured environments lags behind that of structured environments [4,5].
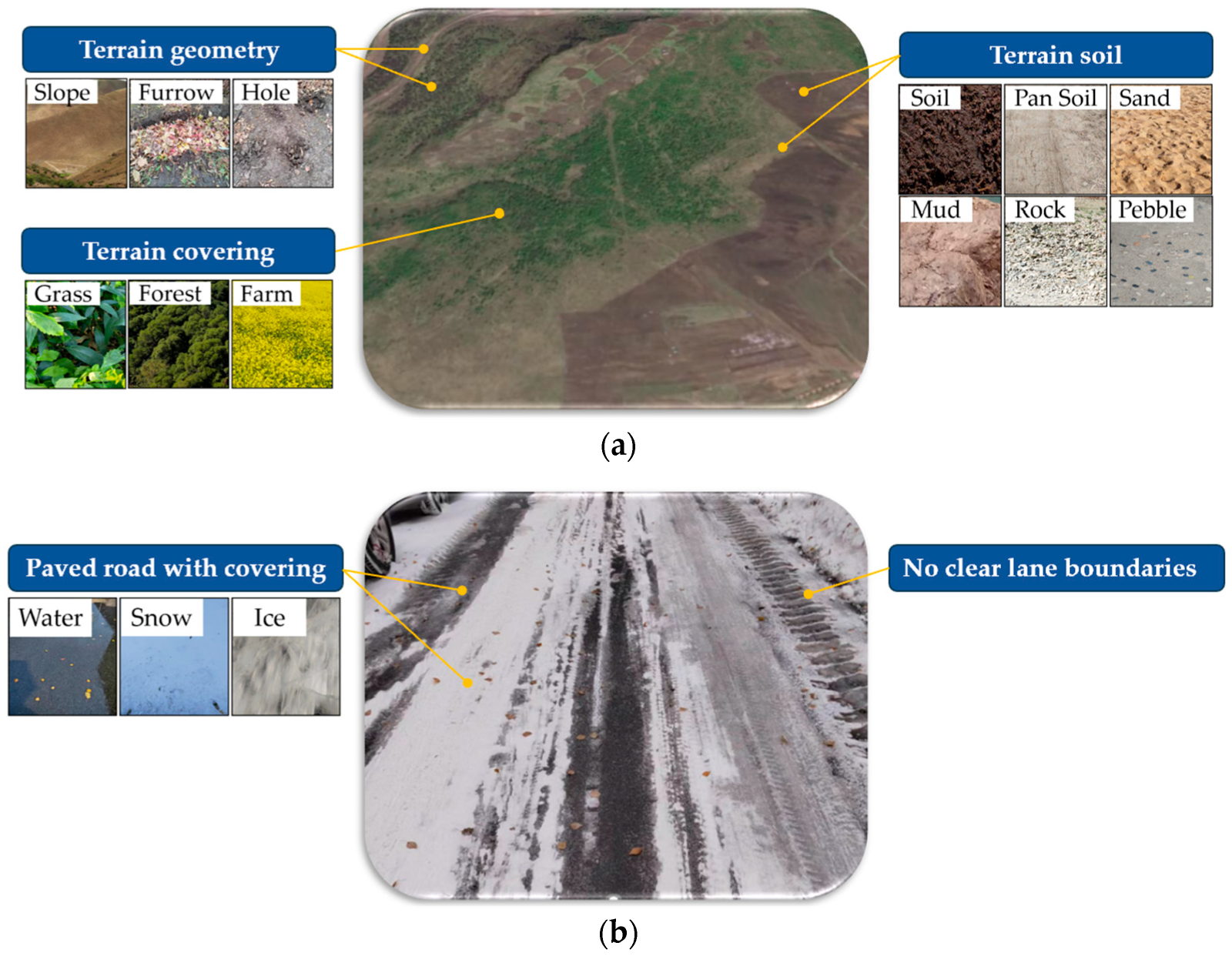
At present, the definition of structured environments and unstructured environments need further research and discussion. Structured environments typically encompass urban roads and highways characterized by regular road geometries, paved road surfaces, and lane markings [6], as depicted in Figure 1. In light of the existing literature [5,7] and practical applications, unstructured environments, which are also referred to using similar keywords such as off-road and terrain, are comprehensively defined in this article as encompassing various types of unpaved roads, as illustrated in Figure 2a, and paved roads where the lane boundaries become indiscernible due to the presence of water, snow, or other coverings, as depicted in Figure 2b. Real-world applications of autonomous driving in unstructured environments have been diverse, with notable implementations in agriculture [8,9], military [10], mining [11], rescue [12], and planetary exploration [13,14].
At present, due to the development of machine learning and sensor technology, the research on perception in unstructured environments has made great progress [16,17]. However, there are still many challenges in the path planning of unstructured environments [7,18].
In path planning, it is essential to take into account road conditions and traffic environments, as highlighted in Table 1. The road conditions in unstructured environments present formidable challenges due to their intricate and limitless variety, inconsistent friction distribution, and perpetually changing dynamic nature [19,20,21]. Additionally, various states and ratios of water, sand, and air within different soil conditions display distinct properties, which are significantly influenced by volatile weather conditions, such as rain, snow, and sandstorms.
The path planning process encompasses both global and local path planning. In structured environments, global path planning relies on sensor information and high-precision maps to determine the most efficient route from the start to the destination. As a general rule, the primary objective of global path planning is to determine the route that results in the shortest distance or the shortest time of travel. Subsequently, local path planning is carried out in response to real-time traffic situations [22], such as lane changes, intersections, and obstacle avoidance, while also considering traffic regulations.
In unstructured path planning, the foremost considerations should focus on the conditions of the road and soil, as well as the adaptability of various vehicles within stochastic environments. Moreover, the driving capacity of diverse vehicles, along with the same vehicles under different loads, is variable. Therefore, global path planning in unstructured environments typically relies on integrated information from sensors, geographic maps, and topographic maps. Obtaining high-precision maps can be challenging in unstructured environments due to factors such as the quality of the GPS signal, military protection, and dynamic changes. Following this, terrain traversability analysis (TTA) is carried out based on the collected data. The purpose of path planning varies among vehicles in different applications. For instance, in agricultural applications, the primary concerns are energy consumption and task completion; meanwhile, in military applications, traversability is paramount. In mining operations, both safety and operator comfort are of utmost importance. Therefore, path planning in unstructured environments is complicated and challenging.
2. Related Works and Survey Boundaries
In structured environments, global path planning and local path planning algorithms are well established in both scientific research and market applications. However, these algorithms may not be well suited for unstructured environments and often require adjustments. In recent years, the integration of machine learning has led to significant progress in TTA research. Various surveys and reviews were conducted to evaluate path planning algorithms and TTA methods in unstructured environments, as summarized in Table 2. Various surveys and reviews have been conducted to evaluate path planning algorithms and TTA methods.
Wang et al. [23] mainly reviewed the perception and navigation methods of collision avoidance. However, obstacle avoidance is only a part of path planning in unstructured environments. Guastella et al. [24] mainly focused on learning-based methods of perception and navigation for ground vehicles, including methods of terrain traversability analysis and end-to-end navigation algorithms. But for both TTA and end-to-end navigation, there are other methods besides the learning-based ones. Chakraborty et al. [8] and Bai et al. [9] focused on path planning in agriculture. Chakraborty et al. [8] mainly reviewed the path planning algorithms and the application characteristics of these methods, such as the application scenarios and limitations. Bai et al. [9] considered obstacle avoidance and TTA of path planning from the perspective of vision methods. Wijayathunga et al. [25] summarized the path planning algorithms encompassing location and map creation methods.
The focus of the above articles was primarily directed towards the design and implementation of path planning algorithms, along with the application of TTA methods. Nevertheless, these articles did not provide a comprehensive discussion of the various factors that influence TTA and did not particularly consider the cost estimation in path planning, along with the constraints imposed by terrain and vehicles. The cost estimation process in unstructured environments is of paramount importance, as it directly impacts the safety risks and economic costs associated with vehicle traversability. Furthermore, the constraints imposed by the terrain and the vehicles themselves must be taken into consideration in order to ensure the practical feasibility of the generated path.
The main purpose of this article is to provide a comprehensive overview and assessment of several unique aspects compared to structured path planning, such as TTA, cost estimation, and constraints. Concerning TTA, a detailed analysis and summary of the influential factors of terrain, vehicle, and vehicle–terrain interaction will be conducted in this article. When discussing cost evaluation, safety costs, energy consumption, and comfort costs will be the main focus. Moreover, the analysis and handling methods of terrain-related constraints will be highlighted as a critical aspect. Additionally, the application of path planning algorithms over the past five years will be reviewed.
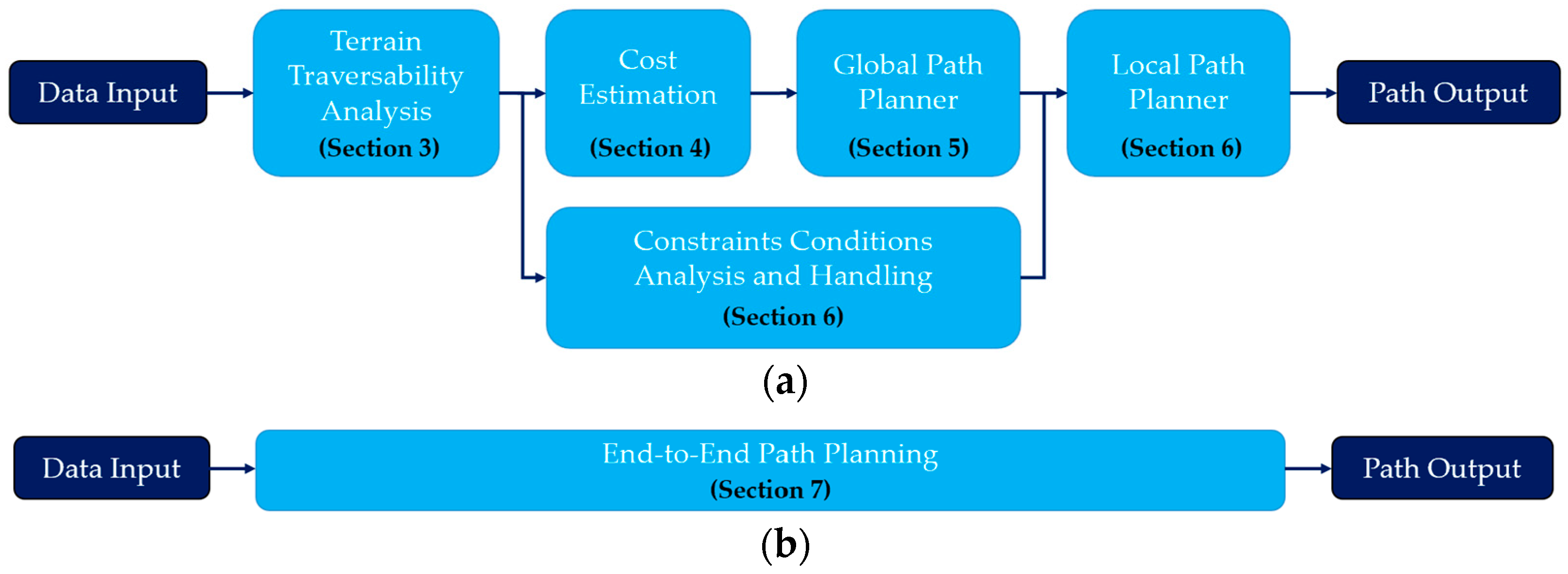
Path planning in unstructured environments is categorized into two main broad categories in this article, presented in Figure 3. The first category involves the hierarchical path planning approach, which encompasses terrain traversability analysis, cost estimation, global path planning, constraint analysis, and local path planning [13,26]. Generally, the outcomes of terrain traversability analysis and cost estimation are utilized as input data for global path planners [27,28]. Subsequently, the local path is generated with the selected global paths and the limits of the constraints. The second category encompasses the end-to-end path planning approach, which directly outputs the path based on the learning methods according to the input of sensor data. The article is structured as follows: Section 3 introduces the terrain traversability analysis methods. Section 4 analyzes the cost estimation of safety, energy, and comfort. Section 5 summarizes the algorithms for global path planners. Section 6 concludes with the constraints and algorithms for local path planners. Section 7 reviews the learning methods of end-to-end path planning. Section 8 contains the conclusions. Section 9 proposes some suggestions for future work.
3. Terrain Traversability Analysis
Traversability refers to the capacity of a ground vehicle to traverse a particular terrain area while satisfying predefined objectives and criteria [29]. This capacity of vehicles has also been referred to with keywords like drivability, navigability, trafficability, and mobility [10,30].
Predicting traversability in advance is fundamental for autonomous path planning in unstructured environments. Inaccurate or inefficient information regarding traversability can result in the generation of substandard paths which not only consume excessive energy and time but also pose unnecessary risks of damaging both equipment and the environment [29]. The global path planner is responsible for selecting the path and optimizing it based on the outputs obtained from the TTA results, such as the traversability map [31,32], traversability cost model [33,34], or terrain classifier [35].
3.1. TTA Relevant Factors
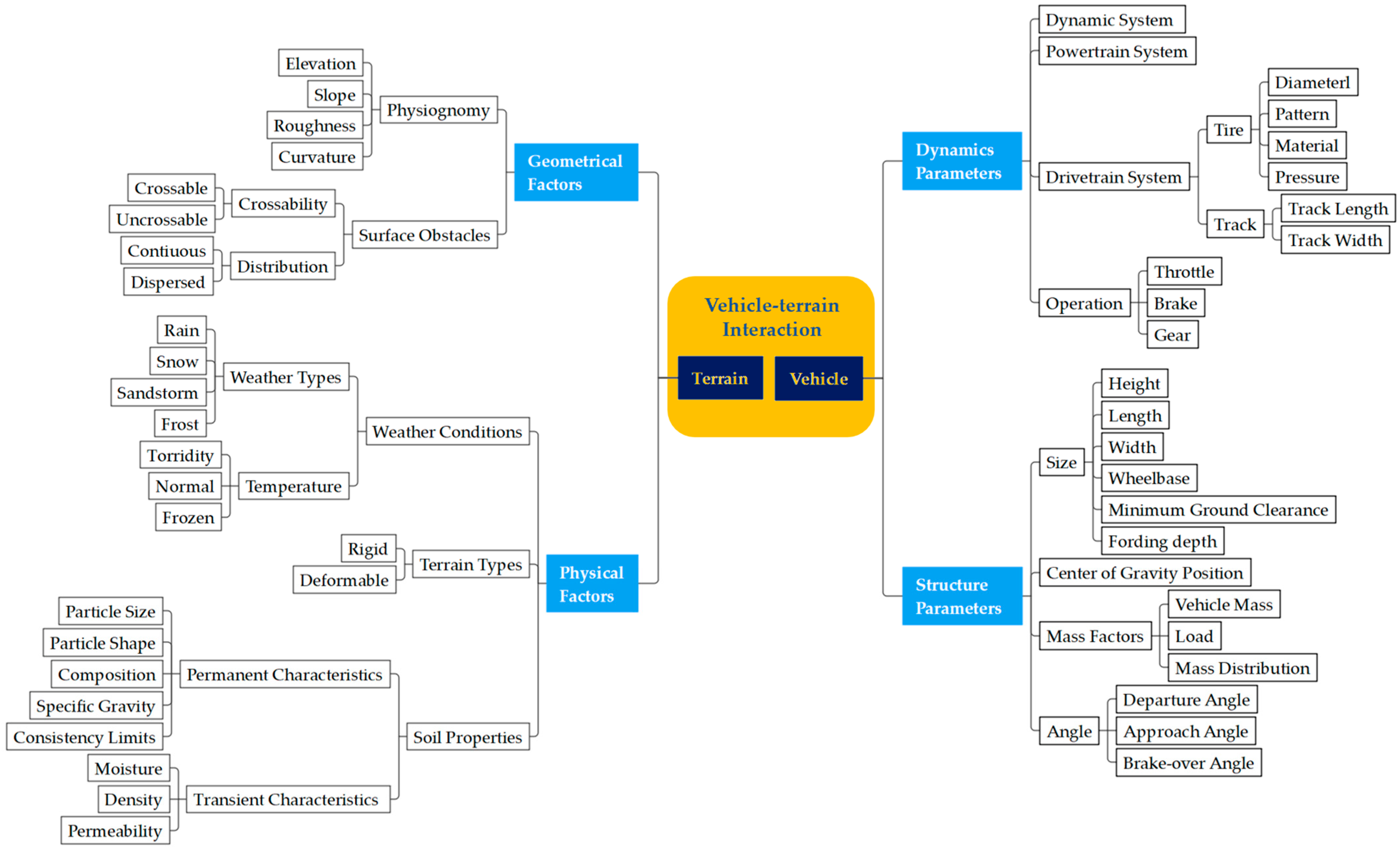
Terrain traversability of autonomous driving vehicles depends on the geometrical and physical properties of the terrain as well as the dynamics and structure parameters of the vehicle [24,30]. Simultaneously, there are complex interactions between the vehicle and the terrain. Figure 4 shows partial relevant factors of TTA.
3.1.1. Terrain Geometrical and Physical Factors
The geometric features of terrain related to TTA encompass physiognomy and static obstacles. Physiognomy is characterized by elevation, slope, roughness, and curvature [29]. Elevation changes and slope characteristics, including vertical and lateral slopes, are fundamental factors in TTA models [36], impacting climbing ability and potential rollover [10]. The research presented by [37] shows simulation and comparison of traversability under different slope conditions. The TTA model also incorporates roughness [24,28], which describes the coarseness and surface irregularity of the ground plane traversed by the vehicle [38]. Heterogeneous roughness surfaces, such as vegetation, pebbles, sand, mud, and rock, pose particular challenges for vehicle driving. In [39], different levels of roughness are classified based on traversability cost. Furthermore, the curvature conditions of the road, constrained by the minimum turning radius of the vehicle, significantly affect traversability. Surface obstacles include crossable features like grass and low tree roots, as well as uncrossable obstacles like thick trees and cliffs. These surface obstacles are further categorized into two morphological groups: continuous ones, such as rivers, ditches, and banks, and scattered ones, such as pits, mounds, and craters.
Terrain physical factors generally comprise terrain types and soil properties. Different weather conditions, such as rain, snow, sandstorms, and frost, can result in the same terrain exhibiting varying characteristics. Temperature also has a notable impact. For instance, hot weather can cause soil drying, while cold weather can lead to freezing. Terrain types are commonly categorized as rigid and deformable [40]. Soil properties encompass permanent characteristics and transient characteristics [41]. Permanent characteristics, such as particle size, particle shape, composition, specific gravity, and consistency limits, remain relatively stable despite external stress fields or short-term environmental effects. Transient characteristics, including moisture, density, and permeability, are subject to change based on environmental and loading conditions. Moreover, soil properties engender intricate interactions between vehicles and the ground, consequently influencing traversability.
3.1.2. Vehicle Dynamics and Structure Parameters
The trafficability of a vehicle is greatly influenced by a range of vehicle dynamics parameters, including those related to the dynamic system, powertrain system, and drivetrain system. One example of this influence can be seen in the vehicle’s ability to overcome the maximum tilt slope, which is dependent on the dynamic system and powertrain system. This ability is also closely linked to the vehicle’s control strategy, which involves factors such as throttle opening, brake operation, and gear selection. Furthermore, different driving mechanisms, such as wheels and tracks, contribute to varying levels of traversability. Tracked vehicles, in contrast to wheeled vehicles, exhibit superior climbing ability and are less prone to getting stuck or slipping on wet mud or soft soil. Conversely, wheeled vehicles are better suited for navigating narrow spaces due to their flexible steering and good traversability. The key parameters affecting the performance of wheels include tire diameter, pattern, material, and pressure, while the main parameters of tracks are their length and width.
The traversability of a vehicle is influenced by various structural size parameters, such as length, width, and height, which determine its ability to navigate narrow roads. Furthermore, the wheelbase and center of gravity position play a crucial role in the vehicle’s ability to corner effectively. In addition, the vehicle’s ability to overcome trenches is closely related to geometric parameters, including tire diameter and wheelbase. Furthermore, parameters such as minimum ground clearance, brake-over angle, approach angle, and departure angle under full load conditions significantly impact the vehicle’s ability to navigate obstacles without collision. Additionally, fording depth determines the vehicle’s traversability in wading areas. The mass and load distribution of the vehicle also affects its acceleration performance, braking distance, and steering stability.
3.1.3. Vehicle–Terrain Interaction
The traditional path planners, as noted in prior research, are designed for operation within structured and homogeneous environments, meaning they do not require explicit consideration of the vehicle–terrain interaction [16]. However, recent studies on TTA have underscored the critical significance of vehicle–terrain interaction [42,43,44]. This interaction can give rise to variations such as wheel slip, wheel entrapment, and vehicle rollover, which consequently influence the overall traversability of the terrain.
The analysis of vehicle–terrain interaction is commonly conducted through the terramechanics model, which can be categorized into three main types [45]: empirical models, physics-based models, and semi-empirical methods. The authors of [46] provided a detailed review of the theory, characteristics, and applications of these models. Empirical models, while simple, lack generalizability beyond the experimental conditions in which they were developed [47]. On the other hand, physics-based models, such as finite and discrete element models, offer the highest fidelity, but their extensive computational requirements make them unsuitable for real-time tire force prediction and limit their applicability for real-time terrain estimation [42]. In contrast, semi-empirical models strike a balance between computational efficiency and fidelity, making them better suited for real-time estimation and control [46,48]. Among the semi-empirical methods, Bekker-based models have emerged as the most widely used [28,49]. These models calculate stresses over the contact patch between a rigid tire and deformable terrain, which are then integrated to determine the forces acting on the tire [50]. To accurately capture the complex stress distribution at the contact patch, Bekker-based models rely on numerous parameters that describe terrain characteristics, such as cohesion and internal friction angle [44].
3.2. TTA Methods
Sensing data are required in TTA to produce various results based on application requirements and method characteristics, as depicted in Figure 5.
According to the sensing types, TTA can be classified into two main groups: remote sensing and in situ soil sensing: remote sensing and in situ soil sensing [48]. Remote sensing encompasses space-borne measurements, such as satellite and thermal spectroscopic, along with local measurements, such as cameras and radars. On the other hand, in situ soil sensing includes both direct and indirect measurements. Commonly used in direct measurements are sub-surface drilling, penetrometers, and bevameters [43]. In the case of indirect measurements, semi-empirical models, simulation models, and principle experiments are employed. The simulation aspect can be carried out using software like Chrono [42,51], Gazebo [18,52], and Open Dynamics Engine [13,35]. Additionally, experiments can be conducted using instrumented wheels [49,53], small smart demo cars [19,54], or real vehicles [31,39].
The early TTA was primarily conducted through experiments. One example is the cone index method, initially proposed by the Waterways Experiment Station (WES) of the U.S. military, to assess the traversability of vehicles in various soil conditions. This method has successfully correlated the soil rating cone index with vehicle performance in loose sand and wet soil [41]. Despite its ability to comprehensively reflect the mechanical and physical properties of soil, the method is not suitable for unknown terrains and necessitates substantial experimental costs. Nevertheless, it remains widely utilized in military and agricultural applications. In contrast, recent mainstream TTA methods have harnessed computer technology and can be categorized into geometry-based, appearance-based, and behavior-based approaches [32]. Geometry-based methods first develop a geometric representation of the terrain, evaluating traversability by comparing features such as height, roughness, slope, curvature, and width with vehicle parameters [30]. Although independent of lighting conditions, smoke, shadows, or adverse weather, this approach based on geomorphology overlooks the physical characteristics of the terrain. Appearance-based methods treat traversability analysis as an image-processing problem, which distinguishes different types of soil and vegetation with distinct costs [29]. While cost-effective in terms of camera usage, this method is susceptible to lighting conditions, smoke, shadows, or poor weather. Its primary application lies in discrete terrain class assessment. A new trend in TTA processing involves behavior-based methods, which evaluate traversability using experts’ driving trajectories and learning-based techniques [55]. This approach incorporates human driving experience and vehicle dynamics but may yield inconsistent assessment results due to variations in drivers and vehicles. The summary and comparison of these TTA methods are shown in Table 3.
The outputs of the TTA delivered to the path planner may be regression-based outputs [56], classification-based outputs [44,57], or mixed regression–classification-based outputs [14,58]. Classification-based results are generally discrete classes of terrain type, including binary classification and multi-classification. Regression-based results are traversability maps or functions with continuous scores. The types of outputs can be selected according to the following path planning algorithms.
To obtain accurate and reliable analysis results, some TTA methods took into ac-count the factors discussed above, including terrain characteristics, vehicle parameters, and vehicle–terrain interactions. Table 4 shows different methods proposed in recent years with the details of sensing type, processing type, factors considered, and output type.
4. Cost Estimation
The TTA mainly determines whether the vehicle can pass through the area to eliminate the untraversable area. However, for traversable areas, vehicles may pass with some costs, such as safety costs [64,65], energy costs [51,66], and comfort costs [39,67]. Generally, the costs are estimated based on the previous TTA output and then the estimation results such as cost function [68] or cost map [69,70] can be obtained and passed to the path planner [34].
4.1. Safety Cost
Traditional path planning mainly considers obstacle avoidance in terms of safety [71], but for unstructured environments, rollover and wheel slip caused by terrain characteristics should also be considered [67]. For example, for traversable areas with negative obstacles and steep slopes, the vehicle may pass after some good operations in a certain direction or at a certain speed [52], but there may be speed limitations or experience requirements for control operation, so there is still a safety risk of rollover in this condition. Negative obstacles are those with a negative height below the ground [5], such as pits and holes. For traversable areas, such as grainy roads, slippery roads, and icy roads, there is a risk of wheel slip, so vehicles have to pass under certain speed or power limitations. Table 5 summarizes the safety cost considerations and methods presented in the recent literature.
The static environment obstacles have been considered in TTA, but there is still a collision risk for the transition zone between the traversable and untraversable areas. This risk can be assessed by setting continuous or discrete safety costs. The safety cost of transition and uncertain zones can be probabilistically set higher compared to normal. The authors of [72] established a safety cost model for obstacle avoidance, which takes into account vehicle size and speed.
Modeling can be used to estimate the safety cost of rollover by determining the probability of driving risk, which is mainly assessed through roll and pitch evaluation. In the case of off-road vehicles, particularly engineering and agricultural machinery, the estimation modeling of rollover heavily relies on the positioning of the center of gravity [43,75]. The authors of [43] provide a detailed calculation method for determining the center of gravity position on slopes. Dynamic rollover models encompass two distinct types: the full-car model [76] and the curvilinear trajectory rollover model [77]. The full-car model offers the benefit of characterizing the roll produced by the impact of the terrain on the vehicle, whereas the curvilinear trajectory rolling model only characterizes the roll produced by steering [78]. The pitch and roll angle derived from the modeling process are essential for estimating the rollover cost [43,67].
The estimation of the safety cost of wheel slip is typically carried out through slip modeling, taking into account factors such as vehicle load, tire type, road type, and adhesion condition. The accuracy of the tire model plays a critical role in this estimation. The Pacejka model is widely used in wheel slip estimation [72,75] because it has been shown applicable to off-road conditions [42]. Various methods for estimating tire–road friction coefficient have been examined in [79], encompassing off-board sensors-based, vehicle dynamics-based, and data-driven approaches. Moreover, a review in [80] outlines slippage estimation methods for planetary exploration rovers, including proprioceptive-based, model-based, and exteroceptive-based strategies. Depending on the safety cost requirements, the results of wheel slip estimation can be discrete or continuous. For instance, in [44], wheel slip is discretized into categories of low slip, moderate slip, and high slip. Furthermore, regression evaluation of wheel slip has been performed using machine learning methods such as multi-layer perceptron (MLP), random forest (RF), and extreme gradient boosting (XGB) [81]. Notably, the estimation model proposed in [81] demonstrates strong performance in both discrete and regression prediction of wheel slip.
4.2. Energy Cost
In unstructured environments, the variations in energy consumption among different paths are substantial due to the diverse terrain conditions. For resource-constrained contexts, such as military, agriculture, planetary rover, and disaster relief missions, prioritizing the reduction in energy costs is crucial for the successful accomplishment of the tasks [51,66,82,83,84]. In pursuit of minimizing energy expenses and enhancing operational efficiency, the selection of the shortest distance or time-optimal path is often favored [85,86]. However, it is noteworthy that in unstructured environments, the path with the shortest distance does not necessarily translate to the one with the least energy consumption [87]. Energy costs are influenced by various factors, including terrain characteristics (such as terrain types, slope, friction, curvature, stiffness, and softness) [51,88] and vehicle parameters (such as engine speed, torque, and gear ratio) [11,89].
The energy cost estimation methods of unstructured environments typically fall into two categories: physics model-based methods and data-driven methods [83], as shown in Table 6.
4.2.1. Physics Model-Based Approaches
Several physics-based models have been developed to accurately estimate driving energy consumption in natural terrains [83,93]. A physics-based motion energy cost model was proposed in [94], which considered terrain attributes such as slope and friction, as well as the effects of configuration changes on operational energy costs. One challenging issue of physics-based approaches is to estimate the interaction between the vehicle and terrain [95]. To address this problem, a self-supervised approach is presented in [95], which considers terrain geometry and soil types to predict energy consumption. The authors of [13] examined the vehicle–terrain interaction and vehicle dynamic model and subsequently establishes the power consumption model through a neural network.
However, physics-based approaches in terrain modeling often exhibit only an approximate representation of the mechanical behavior of various types of terrain [96]. Furthermore, these approaches typically rely on terrain-dependent parameters that are frequently unknown a priori. Moreover, the utilization of these methods may result in substantial computational costs and may be unsuitable for time-sensitive planning frameworks [97].
4.2.2. Data-Driven Approaches
Data-driven approaches have been proposed as a solution to the challenges associated with physics-based approaches [83,98]. One type of these approaches is to classify and identify the environment into a set of different categories. Then, different data-driven energy models, such as semi-empirical function [92,99], table lookup [100], or neural network [101,102], are used to link the terrain geometry to the drive energy consumption of each terrain type. However, this type of approach is not suitable for terrain with uncertainty.
Probabilistic methods can capture and clarify the uncertainty in energy prediction [51]. The authors of [82] used Gaussian process regression (GPR) and known vehicle modeling information to predict future path energy costs. A framework based on multi-task Gaussian process regression (MTGP) to share terrain information across multiple robots was developed to predict power consumption [88]. Meta learning was used in [51,83] to model the existing energy consumption uncertainties and effectively adapt probabilistic predictions based on a small number of local measurements.
However, data-driven approaches are specific to one individual and generally cannot be directly applied to different individuals or the same individual under different operating conditions (e.g., tire pressure, weight distribution) [88].
4.3. Comfort Cost
When vehicles drive on uneven ground in unstructured environments, vibration occurs, impacting the performance and lifespan of vehicle parts. Additionally, this vibration affects the integrity of the transported goods. Consequently, it is essential to evaluate the comfort cost when planning the vehicle’s path in unstructured terrains to ensure stable driving [11,103].
Comfort is closely related to different parameters such as the natural frequency of the vehicle system, road profile, and system characteristics. The elevation variance of the ground nodes was used in [52,104] to describe the terrain unevenness. The authors of [43] studied vibration responses of different models to different ground conditions, including quarter-car model, bicycle–car model, half-car model, and full-car model. The relationship among vehicle shock, ground roughness, and vehicle speed has been studied in [103] using machine learning. Based on the above influencing factors and their correlation, cost functions of comfort were established. The cost function of comfort in [67] mainly considered the terrain smoothness and path consistency. In addition, path vertical variation was also taken into account in [105].
5. Global Path Planner
The global path planner is mainly used to generate the cursory path which is based on the traversability and cost estimation. The traditional algorithms for global path planners have been improved and applied in unstructured environments, such as graph-search-based, sampling-based, and artificial potential field (APF) methods, and optimal methods [7,106,107], as depicted in Table 7.
Graph search-based methods discretize the configuration space as a graph and then search for a minimum-cost path within it [7]. The A* algorithm [108] and Dijkstra algorithm [39,114] and their improvements are the most common approaches. The obtained cost map of TTA can easily be integrated into a classical graph search algorithm [24]. For this method, the global optimal solution can be obtained, complex terrain and obstacles can be dealt with, and the dynamic constraints of the vehicle can be taken into account. However, this method takes a long time to search and is not suitable for real-time path planning. Moreover, for dynamic environments, map information needs to be updated constantly, which increases the computational load and complexity.
For sampling-based methods, a set of nodes or other forms are used to randomly sample the environment to obtain the final path [52]. Rapidly exploring Random Tree (RRT) [109] and the Probabilistic Road Map (PRM) [91] are the two most common methods. These methods have probabilistic completeness, but it is difficult to find the optimal solution in unstructured environments [7,64].
For artificial potential field methods, the global path is planned by setting the gravitational field of the starting and ending points and the repulsive force field of obstacles [67], which is simple and easy to understand, and can be implemented in the case of high real-time requirements for path planning. However, this method is prone to falling into local minima, and the planned path is not necessarily the global optimal solution [64,67].
In optimal methods, the path optimization problem can be solved by gradient descent algorithm (GDA) or intelligent optimization algorithm such as particle swarm optimization (PSO) [85] and genetic algorithm (GA) [11]. This method can deal with multi-objective optimization problems and can improve search efficiency by introducing heuristic methods and strategies based on prior knowledge of the problem. However, it needs high computational complexity and is easy to fall into local minimum solutions.
Due to the complexity of the unstructured environment, several methods are often combined to plan the optimal path. For example, some articles discretize vehicle states by using such as sampling-based methods and search for a least-cost path by using the Dijkstra or A* algorithm [13,69]. The artificial potential field method and optimal path methods were combined in [113] to search for the globally optimal path.
6. Local Path Planner
Local path planning optimizes the path from global path planning to ensure smoothness and safety, considering vehicle and terrain limits, path feasibility, and dynamic environment collision avoidance.
6.1. Constraints
Local path planners must account for various constraints related to vehicle and terrain limitations. Table 8 provides an overview of the constraints considered in recent articles.
For position constraints, the optimized trajectories must pass through some specific points whose positions are known during the planning process, such as the start point and the goal point [52,115]. Continuity constraints are mainly required for the connection points of each segment trajectory. To ensure the smoothness of the trajectory, the continuity of the movement, and the requirement of comfort, it is necessary to ensure that the derivative of the connection point is continuous [13]. Kinematic constraints contain inequality constraints and equality constraints. For inequality constraints, an autonomous vehicle has to satisfy the limits of physical restrictions on the values of velocity, acceleration, and steering angle within their corresponding bounds [11,116]. According to the chosen vehicle model, an autonomous vehicle should also satisfy the kinematic equality constraints. Dynamics constraints are established according to the vehicle dynamic model and driving conditions. For example, the constraints of engine power are set according to the application scenario and vehicle dynamic parameters [11]. Safety constraints contain the collision avoidance constraints [85,104,117] and rollover-free constraints [66,75]. Obstacle avoidance can be met by setting a safe distance from obstacles or limits on speed and acceleration [118]. Rollover can be avoided by limiting the steering angle [75], pitch angle, and roll angle [66]. The speed and acceleration constraints during traveling on a side slope were studied in [43].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 8.
Overview of constraints considered in recent articles.
| Literature | Position | Continuity | Kinematic | Dynamics | Safety |
|---|---|---|---|---|---|
| Usami et al., 2020 [119] | Initial, terminal | Curvature, b-spline | Speed, acceleration | Vehicle dynamics, Motor/Engine–Torque | Wheel slip, Rollover |
| Tian et al., 2021 [11] | Terrain-dependent | / | Speed, acceleration, terrain-dependent | Engine Power | / |
| Zhou et al., 2022 [52] | Initial, terminal | Bezier curve, derivative continuity | Speed, acceleration | / | Collision avoidance |
| Guo et al., 2022 [85] | Initial, terminal | / | Speed, acceleration, steering angle, terrain-dependent | Vehicle dynamics | Collision avoidance |
| Goulet et al., 2022 [66] | Initial, terminal | / | Speed, acceleration | Vehicle dynamics | Wheel slip, rollover, collision avoidance |
| Sun et al., 2022 [104] | Initial, terminal | / | Speed, acceleration, steering angle, steering angular speed | Vehicle dynamics | Collision avoidance |
| Qi et al., 2023 [120] | Initial, terminal | Three-layers continuous optimizer | Speed, acceleration | Vehicle dynamics | Collision avoidance |
| Chen et al., 2023 [31] | Initial, terminal | Curvature | Speed, acceleration, angular speed, angular acceleration | Vehicle dynamics | Collision avoidance |
There are also constraints related to terrain [11,52,85]. For example, when going up and down slopes or around corners, speed and acceleration have different limits depending on the terrain [11]. In addition, when the vehicle approaches the shoulder edge, the vehicle steering is restricted to protect the vehicle tire, and ignoring the constraints will cause blowout and tire cord breakdown [85,121]. For field operations, such as mining areas, the vehicle has to enter a narrow area, but due to environmental restrictions, the vehicle sometimes cannot turn and can only go backward. To effectively handle the terrain-dependent constraints, an approximation formulation for these constraints was designed to eliminate the non-differentiability of these constraints [85]. Some terrain constraints can be set as a series of subgoals based on different terrain features, and then decompose the whole planning problem into a series of subproblems with different constraints, which are widely applied to mountain slopes [119,122].
6.2. Dynamic Obstacles Avoidance Algorithms
Local path planning strategies generally utilize sensor data about their surroundings to respond to the changing dynamics of the environment [25]. Dynamic obstacle avoidance is crucial to ensure safety, which makes obstacle avoidance decisions based on the perception of the constantly changing local environment [123]. Table 9 presents various algorithms employed for dynamic obstacle avoidance in unstructured local path planning.
The dynamic window approach (DWA) is planned in the velocity space to generate a reference point motion speed that satisfies the vehicle constraints and ensures obstacle avoidance. It is suitable for real-time path planning and it can also optimize the algorithm’s performance by adjusting the window parameters. However, it is sensitive to changes in the environment and requires frequent updates of obstacle information around the mobile robot [18,129].
The artificial potential field method is utilized in local path planning to establish a repulsive force field around the robot’s obstacles, thereby guiding the robot to avoid obstacles and reach its target via a safe path. This method is particularly advantageous in the avoidance of unknown obstacles. Nonetheless, in complex environments, it may readily become trapped in local minima and is susceptible to noise interference [64,129].
The Time Elastic Banding Algorithm is the improvement based on the elastic band algorithm, which uses the concept of elastic body in mechanics to apply force to points on the path, and realize obstacle avoidance through the action of force. It considers the continuity of time, making the path smoother, but it cannot deal with complex scenes [129].
7. End-to-End Path Planning
For end-to-end path planning, the output path is generated directly according to the input of sensor data based on the learning methods which include the consideration of terrain and vehicle without separate procedures of TTA and cost estimation. With the development of machine learning, different kinds of learning-based algorithms were applied in end-to-end path planning, as shown in Table 10. To improve the adaptation of different vehicles, a CNN (Convolutional Neural Network) was used in [4] with a stereo camera for off-road path prediction. Apprenticeship learning was used in [19] by the sensor data from cameras and proprioceptive sensors for the adaptation navigation of different terrain types, such as concrete, grass, mud, pebble, and rock. The authors of [130] proposed an online adaptive self-supervised learning for off-road driving in rough terrain to realize a smooth, collision-free navigation policy that was suitable for plentiful vegetation, rock, and sandy environments. Inverse reinforcement learning using soft value iteration networks was proposed in [131] to solve the difficult path planning problems of planetary rovers with satellite maps. To improve planning time and planning success rate, deep reinforcement learning based on Rainbow architecture was used in [18] to navigate unknown rough terrain. Gaussian process regression (GPR) and decision tree theory were combined in [132] to build a proactive method to autonomously adapt the behavior to a priori unknown environments. [133] was based on Gaussian process regression to study the navigation in dynamic uncertain and unseen terrain. The path planning of terrain with different slop, friction coefficient, and roughness conditions was studied in [60] by Gaussian process regression according to the inputs of RGB camera and LiDAR.
The end-to-end path planning approach has stronger adaptability with different terrains than the hierarchical approach, especially for unknown environments. However, it depends on the dataset which is insufficient in unstructured environments at present. In addition, the end-to-end approach requires a lot of computing power, so it does not perform well in real-time planning.
8. Conclusions
Methods of unstructured path planning were reviewed in detail in this article, including the path planning framework, the relevant factors, the analysis methods, the necessary models, and algorithms. This article focused on the unique aspects compared to structured path planning, such as TTA, cost estimation, and terrain-dependent constraints.
- This article categorized path planning in unstructured environments into hierarchical and end-to-end approaches. The hierarchical path planning approach involves TTA, cost estimation, global path planner, constraints analysis and handling, and local path planner. The end-to-end path planning approach directly outputs the path based on the learning methods according to the input of sensor data. The recent articles on end-to-end path planning were summarized in terms of algorithm, sensor data, and application. The end-to-end path planning approach has stronger adaptability, but it needs a large quantity of dataset and computing power.
- The relevant factors influencing TTA were meticulously summarized and thoroughly discussed. These factors encompass terrain geometrical and physical attributes, vehicle dynamics, structural parameters, and the interaction between the vehicle and the terrain. This thorough analysis of relevant factors forms the foundation of TTA. Incorporating a more comprehensive consideration of these factors is instrumental in delivering a more accurate TTA. The inputs for TTA were categorized into remote sensing and in situ soil sensing, and the corresponding sensors and sensing techniques were introduced. For TTA processing, there are four methods: the cone index method was proposed early and is mainly based on experimental; the other methods are based on computer technology, including geometry-based, appearance-based, and behavior-based ones. These four methods were compared and summarized in detail. The output of the TTA delivered to the path planner may be regression-based, classification-based, or mixed regression and classification.
- For cost estimation, the models and methods were summarized, including safety cost, energy cost, and comfort cost. Among them, the energy cost was analyzed and discussed emphatically. The physics model-based and data-driven energy cost approaches were introduced and compared. In addition, the considerations and estimation methods of safety cost and comfort cost were reviewed.
- The constraints considered in recent articles were summarized, including position constraints, continuity constraints, kinematic constraints, dynamics constraints, and safety constraints. Among them, the terrain-dependent constraints and their handling methods were introduced emphatically.
- The global and local path planning methods suitable for unstructured environments in recent articles were reviewed and summarized.
9. Perspectives
In the future, to achieve autonomous driving in unstructured environments, several important research areas remain to be explored:
- Multiple uncertainties in path planning. In practical applications, it is often challenging to acquire an accurate prior map. Even in familiar environments, there can be randomness in different weather conditions. Especially in agriculture and rescue operations, the actual environment is often dynamic. Additionally, for operational vehicles, the load is often variable. These interactive uncertainties increase the complexity that should be further considered in TTA and path planning.
- The reliability and coverage of TTA. High-fidelity terramechanics models are essential for reliable TTA. However, most terramechanics models currently used in unstructured path planning are simplified, making it challenging to accurately represent real-world conditions. Additionally, off-road vehicles often operate on submerged ground, such as agricultural machinery and amphibious vehicles. It is undoubtedly more challenging for vehicles to traverse submerged soil compared to normal soil. Nevertheless, there is currently limited consideration of this in TTA.
- Vehicle instability evaluation. Vehicle instability evaluation is fundamental for unstructured path planning. Accurate failure analysis is necessary to make a reasonable estimation of vehicle traversability and cost. Currently, numerous studies have been conducted on the models and evaluation criteria of failure analysis, but their coverage and accuracy fall short of meeting the requirements of unstructured environment path planning.
- The effect of vehicle posture on path planning. Under the same terrain and conditions, the traversability and cost of vehicles with different postures are often different. For example, the risk severity of a vehicle moving forward and backward at the same speed is different. Besides, on the same slope, the energy consumption of vehicles going uphill and downhill is also different. In addition, for some scenarios, the vehicle cannot traverse in the forward direction but can successfully pass through by adjusting the heading angle or with a series of maneuvers. However, there is limited consideration of vehicle posture in current research.
- Safety redundancy in path planning. Safety is a crucial aspect of path planning, and indeed, it is necessary to achieve higher safety goals. To ensure safety, redundancy often exists in actual path planning. However, for vehicles, especially military vehicles operating in more demanding conditions, excessive safety redundancy can affect the maneuverability range. Therefore, the precise boundaries of safety need to be further explored.
- Adaptation and real-time requirements in path planning. As discussed above, the present hierarchical path planning does not perform well in adaptation and the end-to-end path planning cannot meet the real-time requirements. However, adaptability and real-time requirements are usually simultaneously needed. Therefore, whether the two frameworks can be combined, or a new framework can be proposed to meet the requirements should be further studied.
- Completeness verification for path planning methods. Real vehicle validation in unstructured environments is sometimes unsafe and does not cover all scenarios. Simulation and small smart demo vehicle testing can partially replace real vehicle testing. However, two issues need to be addressed in the alternative tests. One is the high fidelity of the alternative tests, including the reproduction of environments, vehicles, and their incentives and responses. The other is the effective and targeted scene design. The test scenario set can be generated according to the characteristics of application scenarios and vehicle instability assessment.
- Applications for passenger cars. Current market applications for autonomous driving in unstructured environments tend to center on agricultural and engineering vehicles. While most driver assistance or autonomous driving features on passenger cars cannot be utilized in unstructured environments, there is a certain demand among passenger vehicle customers for autonomous driving capabilities in snow, ice, desert, or other unstructured environments. However, there is limited research on the path planning for this purpose.
Author Contributions
Conceptualization, N.W., J.W. and D.X.; methodology, N.W. and J.W.; formal analysis, N.W. and X.L.; investigation, N.W., X.L. and J.W.; writing—original draft preparation, N.W., X.L., K.Z., J.W. and D.X.; writing—review and editing, N.W., X.L., J.W. and D.X.; supervision, J.W. and D.X.; project administration, J.W.; funding acquisition, J.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China, grant number 52272434.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path Planning and Obstacle Avoidance for AUV: A Review. Ocean Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Li, L.; Li, J.; Zhang, S. Review Article: State-of-The-Art Trajectory Tracking of Autonomous Vehicles. Mech. Sci. 2021, 12, 419–432. [Google Scholar] [CrossRef]
- He, X.; Wu, J.; Huang, Z.; Hu, Z.; Wang, J.; Sangiovanni-Vincentelli, A.; Lv, C. Fear-Neuro-Inspired Reinforcement Learning for Safe Autonomous Driving. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 46, 267–279. [Google Scholar] [CrossRef] [PubMed]
- Holder, C.J.; Breckon, T.P. Learning to Drive: Using Visual Odometry to Bootstrap Deep Learning for Off-Road Path Prediction. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 2104–2110. [Google Scholar]
- Islam, F.; Nabi, M.M.; Ball, J.E. Off-Road Detection Analysis for Autonomous Ground Vehicles: A Review. Sensors 2022, 22, 8463. [Google Scholar] [CrossRef] [PubMed]
- Albrecht, A.; Heide, N.F.; Frese, C.; Zube, A. Generic Convoying Functionality for Autonomous Vehicles in Unstructured Outdoor Environments. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 1949–1955. [Google Scholar]
- Li, Z.; Zhao, P.; Jiang, C.; Huang, W.; Liang, H. A Learning-Based Model Predictive Trajectory Planning Controller for Automated Driving in Unstructured Dynamic Environments. IEEE Trans. Veh. Technol. 2022, 71, 5944–5959. [Google Scholar] [CrossRef]
- Chakraborty, S.; Elangovan, D.; Govindarajan, P.L.; ELnaggar, M.F.; Alrashed, M.M.; Kamel, S. A Comprehensive Review of Path Planning for Agricultural Ground Robots. Sustainability 2022, 14, 9156. [Google Scholar] [CrossRef]
- Bai, Y.; Zhang, B.; Xu, N.; Zhou, J.; Shi, J.; Diao, Z. Vision-Based Navigation and Guidance for Agricultural Autonomous Vehicles and Robots: A Review. Comput. Electron. Agric. 2023, 205, 107584. [Google Scholar] [CrossRef]
- Heštera, H.; Pahernik, M. Physical-Geographic Factors of Terrain Trafficability of Military Vehicles According to Western World Methodologies. Hrvat. Geogr. Glas. 2018, 80, 5–31. [Google Scholar] [CrossRef]
- Tian, F.; Zhou, R.; Li, Z.; Li, L.; Gao, Y.; Cao, D.; Chen, L. Trajectory Planning for Autonomous Mining Trucks Considering Terrain Constraints. IEEE Trans. Intell. Veh. 2021, 6, 772–786. [Google Scholar] [CrossRef]
- Morales, J.; Vázquez-Martín, R.; Mandow, A.; Morilla-Cabello, D.; García-Cerezo, A. The UMA-SAR Dataset: Multimodal Data Collection from a Ground Vehicle during Outdoor Disaster Response Training Exercises. Int. J. Robot. Res. 2021, 40, 835–847. [Google Scholar] [CrossRef]
- Sakayori, G.; Ishigami, G. Energy-Aware Trajectory Planning for Planetary Rovers. Adv. Robot. 2021, 35, 1302–1316. [Google Scholar] [CrossRef]
- Zhou, R.; Feng, W.; Yang, H.; Gao, H.; Li, N.; Deng, Z.; Ding, L. Predicting Terrain Mechanical Properties in Sight for Planetary Rovers with Semantic Clues. arXiv 2020. [Google Scholar] [CrossRef]
- Zhang, L.; Du, Z.; Zhao, S.; Zhai, Y.; Shen, Y. Development and Verification of Traffic Confrontation Simulation Test Platform Based on PanoSim. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; pp. 1814–1818. [Google Scholar]
- Xiao, X.; Biswas, J.; Stone, P. Learning Inverse Kinodynamics for Accurate High-Speed Off-Road Navigation on Unstructured Terrain. IEEE Robot. Autom. Lett. 2021, 6, 6054–6060. [Google Scholar] [CrossRef]
- Zhong, C.; Li, B.; Wu, T. Off-Road Drivable Area Detection: A Learning-Based Approach Exploiting LiDAR Reflection Texture Information. Remote Sens. 2023, 15, 27. [Google Scholar] [CrossRef]
- Josef, S.; Degani, A. Deep Reinforcement Learning for Safe Local Planning of a Ground Vehicle in Unknown Rough Terrain. IEEE Robot. Autom. Lett. 2020, 5, 6748–6755. [Google Scholar] [CrossRef]
- Siva, S.; Wigness, M.; Rogers, J.; Zhang, H. Robot Adaptation to Unstructured Terrains by Joint Representation and Apprenticeship Learning. In Proceedings of the Robotics: Science and Systems, Freiburg im Breisgau, Germany, 12–17 July 2019. [Google Scholar]
- Yu, K.; Xu, C.; Ma, J.; Fang, B.; Ding, J.; Xu, X.; Bao, X.; Qiu, S. Automatic Matching of Multimodal Remote Sensing Images via Learned Unstructured Road Feature. Remote Sens. 2022, 14, 4595. [Google Scholar] [CrossRef]
- Guo, C. Analysis of Unstructured Road Information Recognition Methods for Unmanned Vehicles. In Proceedings of the 2019 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Changsha, China, 12–13 January 2019; pp. 84–89. [Google Scholar]
- He, X.; Yang, H.; Hu, Z.; Lv, C. Robust Lane Change Decision Making for Autonomous Vehicles: An Observation Adversarial Reinforcement Learning Approach. IEEE Trans. Intell. Veh. 2023, 8, 184–193. [Google Scholar] [CrossRef]
- Wang, Y.; Li, X.; Zhang, J.; Li, S.; Xu, Z.; Zhou, X. Review of Wheeled Mobile Robot Collision Avoidance under Unknown Environment. Sci. Prog. 2021, 104, 00368504211037771. [Google Scholar] [CrossRef]
- Guastella, D.C.; Muscato, G. Learning-Based Methods of Perception and Navigation for Ground Vehicles in Unstructured Environments: A Review. Sensors 2021, 21, 73. [Google Scholar] [CrossRef] [PubMed]
- Wijayathunga, L.; Rassau, A.; Chai, D. Challenges and Solutions for Autonomous Ground Robot Scene Understanding and Navigation in Unstructured Outdoor Environments: A Review. Appl. Sci. 2023, 13, 9877. [Google Scholar] [CrossRef]
- He, X.; Chen, H.; Lv, C. Robust Multiagent Reinforcement Learning toward Coordinated Decision-Making of Automated Vehicles. SAE Int. J. Veh. Dyn. Stab. NVH 2023, 7, 475–488. [Google Scholar] [CrossRef]
- Ono, M.; Fuchs, T.J.; Steffy, A.; Maimone, M.; Yen, J. Risk-Aware Planetary Rover Operation: Autonomous Terrain Classification and Path Planning. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–10. [Google Scholar]
- Mayuku, O.; Surgenor, B.W.; Marshall, J.A. A Self-Supervised Near-to-Far Approach for Terrain-Adaptive Off-Road Autonomous Driving. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 14054–14060. [Google Scholar]
- Wallin, E.; Wiberg, V.; Vesterlund, F.; Holmgren, J.; Persson, H.J.; Servin, M. Learning Multiobjective Rough Terrain Traversability. J. Terramech 2022, 102, 17–26. [Google Scholar] [CrossRef]
- Papadakis, P. Terrain Traversability Analysis Methods for Unmanned Ground Vehicles: A Survey. Eng. Appl. Artif. Intell. 2013, 26, 1373–1385. [Google Scholar] [CrossRef]
- Chen, D.; Zhuang, M.; Zhong, X.; Wu, W.; Liu, Q. RSPMP: Real-Time Semantic Perception and Motion Planning for Autonomous Navigation of Unmanned Ground Vehicle in off-Road Environments. Appl. Intell. 2023, 53, 4979–4995. [Google Scholar] [CrossRef]
- Zhu, Z.; Li, N.; Sun, R.; Zhao, H.; Xu, D. Off-Road Autonomous Vehicles Traversability Analysis and Trajectory Planning Based on Deep Inverse Reinforcement Learning. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 971–977. [Google Scholar]
- Graf, U.; Borges, P.; Hernández, E.; Siegwart, R.; Dubé, R. Optimization-Based Terrain Analysis and Path Planning in Unstructured Environments. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5614–5620. [Google Scholar]
- Zhang, K.; Niroui, F.; Ficocelli, M.; Nejat, G. Robot Navigation of Environments with Unknown Rough Terrain Using Deep Reinforcement Learning. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–7. [Google Scholar]
- Chavez-Garcia, R.O.; Guzzi, J.; Gambardella, L.M.; Giusti, A. Learning Ground Traversability from Simulations. IEEE Robot. Autom. Lett. 2018, 3, 1695–1702. [Google Scholar] [CrossRef]
- Saarilahti, M. Development of a Protocol for Ecoefficient Wood on Sensitive Sites (Ecowood); University of Helsinki: Turku, Finland, 2002. [Google Scholar]
- Green, A.R.; Rye, D. Sensible Planning for Vehicles Operating Over Difficult Unstructured Terrains. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–8. [Google Scholar]
- Howard, A.; Seraji, H. Vision-Based Terrain Characterization and Traversability Assessment. J. Robot. Syst. 2001, 18, 577–587. [Google Scholar] [CrossRef]
- Oliveira, F.G.; Neto, A.A.; Howard, D.; Borges, P.; Campos, M.F.M.; Macharet, D.G. Three-Dimensional Mapping with Augmented Navigation Cost through Deep Learning. J. Intell. Robot. Syst. 2021, 101, 50. [Google Scholar] [CrossRef]
- Serban, R.; Taylor, M.; Negrut, D.; Tasora, A. Chrono::Vehicle: Template-Based Ground Vehicle Modelling and Simulation. Int. J. Veh. Perform. 2019, 5, 18–39. [Google Scholar] [CrossRef]
- Kejian, Z. Vehicle-Terrainmechanics; National Defense Industry Press: Beijing, China, 2002. [Google Scholar]
- Dallas, J.; Weng, Y.; Ersal, T. Combined Trajectory Planning and Tracking for Autonomous Vehicles on Deformable Terrains. In Proceedings of the ASME 2020 Dynamic Systems and Control Conference, Pittsburgh, PA, USA, 5–7 October 2020; pp. 1–8. [Google Scholar]
- Taghavifar, H.; Mardani, A. Off-Road Vehicle Dynamics: Analysis, Modelling and Optimization, 1st ed.; Studies in Systems, Decision and Control; Springer: Berlin/Heidelberg, Germany, 2019; Volume 70. [Google Scholar]
- Gonzalez, R.; Iagnemma, K. DeepTerramechanics: Terrain Classification and Slip Estimation for Ground Robots via Deep Learning. arXiv 2018. [Google Scholar] [CrossRef]
- Dallas, J.; Cole, M.P.; Jayakumar, P.; Ersal, T. Neural Network Based Terramechanics Modeling and Estimation for Deformable Terrains. arXiv 2020. [Google Scholar] [CrossRef]
- Taheri, S.; Sandu, C.; Taheri, S.; Pinto, E.; Gorsich, D. A Technical Survey on Terramechanics Models for Tire-Terrain Interaction Used in Modeling and Simulation of Wheeled Vehicles. J. Terramech 2015, 57, 1–22. [Google Scholar] [CrossRef]
- Dallas, J.; Jain, K.; Dong, Z.; Cole, M.P.; Jayakumar, P.; Ersal, T. Online Terrain Estimation for Autonomous Vehicles on Deformable Terrains. J. Terramech 2020, 91, 11–22. [Google Scholar] [CrossRef]
- Chhaniyara, S.; Brunskill, C.; Yeomans, B.; Matthews, M.C.; Saaj, C.; Ransom, S.; Richter, L. Terrain Trafficability Analysis and Soil Mechanical Property Identification for Planetary Rovers: A Survey. J. Terramech 2012, 49, 115–128. [Google Scholar] [CrossRef]
- Tsubaki, H.; Ishigami, G. Experimental Study on Wheel-Soil Interaction Mechanics Using in-Wheel Sensor and Particle Image Velocimetry Part I: Analysis and Modeling of Normal Stress of Lightweight Wheeled Vehicles. J. Terramech 2021, 93, 23–39. [Google Scholar] [CrossRef]
- Smith, W.C. Modeling of Wheel-Soil Interaction for Small Ground Vehicles Operating on Granular Soil; The University of Michigan: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Visca, M.; Powell, R.; Gao, Y.; Fallah, S. Meta-Conv1D Energy-Aware Path Planner for Mobile Robots in Unstructured Terrains. In Proceedings of the 2022 7th International Conference on Robotics and Automation Engineering, Singapore, 18–20 November 2022; pp. 150–157. [Google Scholar]
- Zhou, B.; Yi, J.; Zhang, X.; Chen, L.; Yang, D.; Han, F.; Zhang, H. An Autonomous Navigation Approach for Unmanned Vehicle in Outdoor Unstructured Terrain with Dynamic and Negative Obstacles. Robotica 2022, 40, 2831–2854. [Google Scholar] [CrossRef]
- Brooks, C.A.; Iagnemma, K. Vibration-Based Terrain Classification for Planetary Exploration Rovers. IEEE Trans. Robot. 2005, 21, 1185–1191. [Google Scholar] [CrossRef]
- Palazzo, S.; Guastella, D.C.; Cantelli, L.; Spadaro, P.; Rundo, F.; Muscato, G.; Giordano, D.; Spampinato, C. Domain Adaptation for Outdoor Robot Traversability Estimation from RGB Data with Safety-Preserving Loss. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 10014–10021. [Google Scholar]
- Zhang, Y.; Wang, W.; Bonatti, R.; Maturana, D.; Scherer, S. Integrating Kinematics and Environment Context into Deep Inverse Reinforcement Learning for Predicting Off-Road Vehicle Trajectories. arXiv 2018. [Google Scholar] [CrossRef]
- Wulfmeier, M.; Ondruska, P.; Posner, I. Maximum Entropy Deep Inverse Reinforcement Learning. arXiv 2015. [Google Scholar] [CrossRef]
- Chiodini, S.; Torresin, L.; Pertile, M.; Debei, S. Evaluation of 3D CNN Semantic Mapping for Rover Navigation. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 32–36. [Google Scholar]
- Suryamurthy, V.; Raghavan, S.; Laurenzi, A.; Tsagarakis, N.G.; Kanoulas, D. Terrain Segmentation and Roughness Estimation Using RGB Data: Path Planning Application on the CENTAURO Robot. In Proceedings of the 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), Toronto, ON, Canada, 15–17 October 2019; pp. 1–8. [Google Scholar]
- Mei, J.; Yu, Y.; Zhao, H.; Zha, H. Scene-Adaptive Off-Road Detection Using a Monocular Camera. IEEE Trans. Intell. Transp. Syst. 2018, 19, 242–253. [Google Scholar] [CrossRef]
- Lee, H.; Kwon, J.; Kwon, C. Learning-Based Uncertainty-Aware Navigation in 3D Off-Road Terrains. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 10061–10068. [Google Scholar]
- Xue, H.; Fu, H.; Xiao, L.; Fan, Y.; Zhao, D.; Dai, B. Traversability Analysis for Autonomous Driving in Complex Environment: A LiDAR-Based Terrain Modeling Approach. J. Field Robot. 2023, 40, 1779–1803. [Google Scholar] [CrossRef]
- Bae, J.; Seo, J.; Kim, T.; Jeon, H.G.; Kwak, K.; Shim, I. Self-Supervised 3D Traversability Estimation With Proxy Bank Guidance. IEEE Access 2023, 11, 51490–51501. [Google Scholar] [CrossRef]
- Guan, T.; He, Z.; Song, R.; Zhang, L. TNES: Terrain Traversability Mapping, Navigation and Excavation System for Autonomous Excavators on Worksite. Auton. Robots 2023, 47, 695–714. [Google Scholar] [CrossRef]
- Xiong, L.; Fu, Z.; Zeng, D.; Leng, B. An Optimized Trajectory Planner and Motion Controller Framework for Autonomous Driving in Unstructured Environments. Sensors 2021, 21, 4409. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Huang, W.; Lv, C. Toward Trustworthy Decision Making for Autonomous Vehicles: A Robust Reinforcement Learning Approach with Safety Guarantees. Engineering 2023. [Google Scholar] [CrossRef]
- Goulet, N.; Ayalew, B. Energy-Optimal Ground Vehicle Trajectory Planning on Deformable Terrains. IFAC-PapersOnLine 2022, 55, 196–201. [Google Scholar] [CrossRef]
- Li, X.; Tang, B.; Ball, J.; Doude, M.; Carruth, D.W. Rollover-Free Path Planning for off-Road Autonomous Driving. Electronics 2019, 8, 614. [Google Scholar] [CrossRef]
- Valencia-Murillo, R.; Arana-Daniel, N.; López-Franco, C.; Alanís, A.Y. Rough Terrain Perception through Geometric Entities for Robot Navigation. In Proceedings of the 2nd International Conference on Advances in Computer Science and Engineering, Los Angeles, CA, USA, 1–2 July 2013; pp. 309–314. [Google Scholar]
- Roy, J.; Wan, N.; Goswami, A.; Vahidi, A.; Jayakumar, P.; Zhang, C. A Hierarchical Route Guidance Framework for Off-Road Connected Vehicles. J. Dyn. Syst. Meas. Control 2018, 140, 071011. [Google Scholar] [CrossRef]
- Pfrunder, A.; Borges, P.V.K.; Romero, A.R.; Catt, G.; Elfes, A. Real-Time Autonomous Ground Vehicle Navigation in Heterogeneous Environments Using a 3D LiDAR. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2601–2608. [Google Scholar]
- He, X.; Liu, Y.; Lv, C.; Ji, X.; Liu, Y. Emergency Steering Control of Autonomous Vehicle for Collision Avoidance and Stabilisation. Veh. Syst. Dyn. 2019, 57, 1163–1187. [Google Scholar] [CrossRef]
- Gao, Y.; Lin, T.; Borrelli, F.; Tseng, E.; Hrovat, D. Predictive Control of Autonomous Ground Vehicles With Obstacle Avoidance on Slippery Roads. In Proceedings of the ASME 2010 Dynamic Systems and Control Conference, Cambridge, MA, USA, 12–15 September 2010; pp. 265–272. [Google Scholar]
- Brandao, M.; Shiguematsu, Y.M.; Hashimoto, K.; Takanishi, A. Material Recognition CNNs and Hierarchical Planning for Biped Robot Locomotion on Slippery Terrain. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 81–88. [Google Scholar]
- Dang, T.V. Autonomous Mobile Robot Path Planning Based on Enhanced A* Algorithm Integrating With Time Elastic Band. MM Sci. J. 2023, 6717–6722. [Google Scholar] [CrossRef]
- Liu, J.; Jayakumar, P.; Stein, J.L.; Ersal, T. A Nonlinear Model Predictive Control Formulation for Obstacle Avoidance in High-Speed Autonomous Ground Vehicles in Unstructured Environments. Int. J. Veh. Mech. Mobil. 2018, 56, 853–882. [Google Scholar] [CrossRef]
- Sandu, C. Vehicle Dynamics: Theory and Applications. J. Guid. Control. Dyn. 2010, 33, 287–288. [Google Scholar] [CrossRef]
- Andrzejewski, R.; Awrejcewicz, J. Nonlinear Dynamics of a Wheeled Vehicle; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Eick, A. A Nonlinear Model Predictive Control Algorithm for an Unmanned Ground on Variable Terrain; Auburn University: Auburn, AL, USA, 2016. [Google Scholar]
- Wang, Y.; Hu, J.; Wang, F.; Dong, H.; Yan, Y.; Ren, Y.; Zhou, C.; Yin, G. Tire Road Friction Coefficient Estimation: Review and Research Perspectives. Chin. J. Mech. Eng. 2022, 35, 6. [Google Scholar] [CrossRef]
- Gonzalez, R.; Iagnemma, K. Slippage Estimation and Compensation for Planetary Exploration Rovers. State of the Art and Future Challenges. J. Field Robot. 2018, 35, 564–577. [Google Scholar] [CrossRef]
- Basri, M.; Karapetyan, A.; Hassan, B.; Khonji, M.; Dias, J. A Hybrid Deep Learning Approach for Vehicle Wheel Slip Prediction in Off-Road Environments. In Proceedings of the 2022 IEEE International Symposium on Robotic and Sensors Environments (ROSE), Abu Dhabi, United Arab Emirates, 14–15 November 2022; pp. 1–7. [Google Scholar]
- Quann, M.; Ojeda, L.; Smith, W.; Rizzo, D.; Castanier, M.; Barton, K. Off-Road Ground Robot Path Energy Cost Prediction through Probabilistic Spatial Mapping. J. Field Robot. 2020, 37, 421–439. [Google Scholar] [CrossRef]
- Visca, M.; Powell, R.; Gao, Y.; Fallah, S. Probabilistic Meta-Conv1D Driving Energy Prediction for Mobile Robots in Unstructured Terrains. IEEE Access 2022, 10, 107913–107928. [Google Scholar] [CrossRef]
- Lacaze, A.; Moscovitz, O.Y.; Declaris, N.; Murphy, K. Path Planning for Autonomous Vehicles Driving over Rough Terrain. In Proceedings of the 1998 IEEE International Symposium on Intelligent Control (ISIC) held jointly with IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA) Intell, Gaithersburg, MD, USA, 17 September 1998; pp. 50–55. [Google Scholar]
- Guo, Y.; Yao, D.; Li, B.; He, Z.; Gao, H.; Li, L. Trajectory Planning for an Autonomous Vehicle in Spatially Constrained Environments. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18326–18336. [Google Scholar] [CrossRef]
- Li, B.; Wang, K.; Shao, Z. Time-Optimal Maneuver Planning in Automatic Parallel Parking Using a Simultaneous Dynamic Optimization Approach. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3263–3274. [Google Scholar] [CrossRef]
- Ganganath, N.; Cheng, C.T.; Tse, C.K. A Constraint-Aware Heuristic Path Planner for Finding Energy-Efficient Paths on Uneven Terrains. IEEE Trans. Industr Inform. 2015, 11, 601–611. [Google Scholar] [CrossRef]
- Quann, M.; Ojeda, L.; Smith, W.; Rizzo, D.; Castanier, M.; Barton, K. Power Prediction for Heterogeneous Ground Robots through Spatial Mapping and Sharing of Terrain Data. IEEE Robot. Autom. Lett. 2020, 5, 1579–1586. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Mukai, M.; Murata, J.; Kawabe, T. Ecological Vehicle Control on Roads with Up-down Slopes. IEEE Trans. Intell. Transp. Syst. 2011, 12, 783–794. [Google Scholar] [CrossRef]
- Higa, S.; Iwashita, Y.; Otsu, K.; Ono, M.; Lamarre, O.; Didier, A.; Hoffmann, M. Vision-Based Estimation of Driving Energy for Planetary Rovers Using Deep Learning and Terramechanics. IEEE Robot. Autom. Lett. 2019, 4, 3876–3883. [Google Scholar] [CrossRef]
- Wallace, N.D.; Kong, H.; Hill, A.J.; Sukkarieh, S. Energy Aware Mission Planning for WMRs on Uneven Terrains. IFAC-PapersOnLine 2019, 52, 149–154. [Google Scholar] [CrossRef]
- Huang, G.; Yuan, X.; Shi, K.; Liu, Z.; Wu, X. A 3-D Multi-Object Path Planning Method for Electric Vehicle Considering the Energy Consumption and Distance. IEEE Trans. Intell. Transp. Syst. 2022, 23, 7508–7520. [Google Scholar] [CrossRef]
- Buse, F.; Lichtenheldt, R.; Krenn, R. SCM-A Novel Approach for Soil Deformation in a Modular Soil Contact Model for Multibody Simulation. In Proceedings of the 4th Joint International Conference on Multibody System Dynamics, Montréal, QC, Canada, 29 May–2 June 2016; pp. 1–14. [Google Scholar]
- Wallace, N.D.; Kong, H.; Hill, A.J.; Sukkarieh, S. Motion Cost Characterisation of an Omnidirectional WMR on Uneven Terrains. IFAC-PapersOnLine 2019, 52, 31–36. [Google Scholar] [CrossRef]
- Otsu, K.; Kubota, T. Energy-Aware Terrain Analysis for Mobile Robot Exploration. In Field and Service Robotics; Springer: Cham, Switzerland, 2016; Volume 113, pp. 373–388. [Google Scholar] [CrossRef]
- Johnson, J.B.; Duvoy, P.X.; Kulchitsky, A.V.; Creager, C.; Moore, J. Analysis of Mars Exploration Rover Wheel Mobility Processes and the Limitations of Classical Terramechanics Models Using Discrete Element Method Simulations. J. Terramech 2017, 73, 61–71. [Google Scholar] [CrossRef]
- He, R.; Sandu, C.; Khan, A.K.; Guthrie, A.G.; Schalk Els, P.; Hamersma, H.A. Review of Terramechanics Models and Their Applicability to Real-Time Applications. J. Terramech 2019, 81, 3–22. [Google Scholar] [CrossRef]
- He, X.; Lv, C. Toward Intelligent Connected E-Mobility: Energy-Aware Cooperative Driving With Deep Multiagent Reinforcement Learning. IEEE Veh. Technol. Mag. 2023, 18, 101–109. [Google Scholar] [CrossRef]
- Gruning, V.; Pentzer, J.; Brennan, S.; Reichard, K. Energy-Aware Path Planning for Skid-Steer Robots Operating on Hilly Terrain. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 2094–2099. [Google Scholar]
- Fallah, S.; Yue, B.; Vahid-Araghi, O.; Khajepour, A. Energy Management of Planetary Rovers Using a Fast Feature-Based Path Planning and Hardware-in-the-Loop Experiments. IEEE Trans. Veh. Technol. 2013, 62, 2389–2401. [Google Scholar] [CrossRef]
- Sakayori, G.; Ishigami, G. Energy Efficient Slope Traversability Planning for Mobile Robot in Loose Soil. In Proceedings of the 2017 IEEE International Conference on Mechatronics (ICM), Churchill, VIC, Australia, 13–15 February 2017; pp. 99–104. [Google Scholar]
- Visca, M.; Bouton, A.; Powell, R.; Gao, Y.; Fallah, S. Conv1D Energy-Aware Path Planner for Mobile Robots in Unstructured Environments. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 2279–2285. [Google Scholar]
- Stavens, D.; Thrun, S. A Self-Supervised Terrain Roughness Estimator for Off-Road Autonomous Driving. arXiv 2012. [Google Scholar] [CrossRef]
- Sun, C.; Li, Q.; Li, B.; Li, L. A Successive Linearization in Feasible Set Algorithm for Vehicle Motion Planning in Unstructured and Low-Speed Scenarios. IEEE Trans. Intell. Transp. Syst. 2022, 23, 3724–3736. [Google Scholar] [CrossRef]
- Hu, X.; Chen, L.; Tang, B.; Cao, D.; He, H. Dynamic Path Planning for Autonomous Driving on Various Roads with Avoidance of Static and Moving Obstacles. Mech. Syst. Signal Process 2018, 100, 482–500. [Google Scholar] [CrossRef]
- Patle, B.K.; Babu, L.G.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A Review: On Path Planning Strategies for Navigation of Mobile Robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Mohanan, M.G.; Salgoankar, A. A Survey of Robotic Motion Planning in Dynamic Environments. Rob. Auton. Syst. 2018, 100, 171–185. [Google Scholar] [CrossRef]
- Min, H.; Xiong, X.; Wang, P.; Yu, Y. Autonomous Driving Path Planning Algorithm Based on Improved A* Algorithm in Unstructured Environment. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 513–526. [Google Scholar] [CrossRef]
- Krüsi, P.; Furgale, P.; Bosse, M.; Siegwart, R. Driving on Point Clouds: Motion Planning, Trajectory Optimization, and Terrain Assessment in Generic Nonplanar Environments. J. Field Robot. 2017, 34, 940–984. [Google Scholar] [CrossRef]
- Jiang, J.; Han, Z.; Li, J.; Wang, Y.; Wang, J.; Xu, S. Global Path Planning of UGVs in Large-Scale Off-Road Environment Based on Improved A-Star Algorithm and Quadratic Programming. In Proceedings of the 2023 IEEE Intelligent Vehicles Symposium (IV), Anchorage, AK, USA, 4–7 June 2023; pp. 1–7. [Google Scholar]
- Yin, J.; Hu, Z.; Mourelatos, Z.P.; Gorsich, D.; Singh, A.; Tau, S. Efficient Reliability-Based Path Planning of Off-Road Autonomous Ground Vehicles Through the Coupling of Surrogate Modeling and RRT*. IEEE Trans. Intell. Transp. Syst. 2023, 24, 15035–15050. [Google Scholar] [CrossRef]
- Yin, J.; Li, L.; Mourelatos, Z.P.; Liu, Y.; Gorisich, D.; Singh, A.; Tau, S.; Hu, Z. Reliable Global Path Planning of Off-Road Autonomous Ground Vehicles Under Uncertain Terrain Conditions. IEEE Trans. Intell. Veh. 2023, 8, 1–14. [Google Scholar] [CrossRef]
- Zhu, S.; Zhu, W.; Zhang, X.; Cao, T. Path Planning of Lunar Robot Based on Dynamic Adaptive Ant Colony Algorithm and Obstacle Avoidance. Int. J. Adv. Robot. Syst. 2020, 17, 1–14. [Google Scholar] [CrossRef]
- Quann, M.; Ojeda, L.; Smith, W.; Rizzo, D.; Castanier, M.; Barton, K. Chance Constrained Reachability in Environments with Spatially Varying Energy Costs. Rob. Auton. Syst. 2019, 119, 1–12. [Google Scholar] [CrossRef]
- He, X.; Lv, C. Toward Personalized Decision Making for Autonomous Vehicles: A Constrained Multi-Objective Reinforcement Learning Technique. Transp. Res. Part C Emerg. Technol. 2023, 156, 104352. [Google Scholar] [CrossRef]
- Ji, X.; He, X.; Lv, C.; Liu, Y.; Wu, J. Adaptive-Neural-Network-Based Robust Lateral Motion Control for Autonomous Vehicle at Driving Limits. Control Eng. Pract. 2018, 76, 41–53. [Google Scholar] [CrossRef]
- Pinkovich, B.; Rivlin, E.; Rotstein, H. Monocular Sensing for Predictive Driving in an Unstructured Scenario. In Proceedings of the 2019 27th Mediterranean Conference on Control and Automation (MED), Akko, Israel, 1-4 July 2019; pp. 606–611. [Google Scholar]
- Nestlinger, G.; Rumetshofer, J.; Solmaz, S. Leader-Based Trajectory Following in Unstructured Environments—From Concept to Real-World Implementation. Electronics 2022, 11, 1866. [Google Scholar] [CrossRef]
- Usami, R.; Kobashi, Y.; Onuma, T.; Maekawa, T. Two-Lane Path Planning of Autonomous Vehicles in 2.5D Environments. IEEE Trans. Intell. Veh. 2020, 5, 281–293. [Google Scholar] [CrossRef]
- Qi, Y.; He, B.; Wang, R.; Wang, L.; Xu, Y. Hierarchical Motion Planning for Autonomous Vehicles in Unstructured Dynamic Environments. IEEE Robot. Autom. Lett. 2023, 8, 496–503. [Google Scholar] [CrossRef]
- Rudny, D.F.; Sallmann, D.W. Analysis of Accidents Involving Alleged Road Surface Defects (i.e., Shoulder Drop-Offs, Loose Gravel, Bumps and Potholes). SAE Technical Papers Series. In Proceedings of the SAE International Congress and Exposition, Detroit, MI, USA, 26–29 February 1996; 1996; p. 960654. [Google Scholar] [CrossRef]
- Cherif, M. Motion Planning for All-Terrain Vehicles: A Physical Modeling Approach for Coping with Dynamic and Contact Interaction Constraints. IEEE Trans. Robot. Autom. 1999, 15, 202–218. [Google Scholar] [CrossRef]
- Gao, X.; Li, J.; Fan, L.; Zhou, Q.; Yin, K.; Wang, J.; Song, C.; Huang, L.; Wang, Z. Review of Wheeled Mobile Robots’ Navigation Problems and Application Prospects in Agriculture. IEEE Access 2018, 6, 49248–49268. [Google Scholar] [CrossRef]
- Missura, M.; Bennewitz, M. Predictive Collision Avoidance for the Dynamic Window Approach. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8620–8626. [Google Scholar]
- Chang, L.; Shan, L.; Jiang, C.; Dai, Y. Reinforcement Based Mobile Robot Path Planning with Improved Dynamic Window Approach in Unknown Environment. Auton. Robots 2021, 45, 51–76. [Google Scholar] [CrossRef]
- Hao, K.; Zhao, J.; Li, Z.; Liu, Y.; Zhao, L. Dynamic Path Planning of a Three-Dimensional Underwater AUV Based on an Adaptive Genetic Algorithm. Ocean. Eng. 2022, 263, 112421. [Google Scholar] [CrossRef]
- Rousseas, P.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Optimal Robot Motion Planning in Constrained Workspaces Using Reinforcement Learning. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 6917–6922. [Google Scholar]
- Nguyen, L.A.; Pham, D.; Ngo, D.; Truong, X.T. A Proactive Trajectory Planning Algorithm for Autonomous Mobile Robots in Dynamic Social Environments. In Proceedings of the 2020 17th International Conference on Ubiquitous Robots (UR), Kyoto, Japan, 22–26 June 2020; pp. 309–314. [Google Scholar]
- Qin, H.; Shao, S.; Wang, T.; Yu, X.; Jiang, Y.; Cao, Z. Review of Autonomous Path Planning Algorithms for Mobile Robots. Drones 2023, 7, 211. [Google Scholar] [CrossRef]
- Manderson, T.; Wapnick, S.; Meger, D.; Dudek, G. Learning to Drive Off Road on Smooth Terrain in Unstructured Environments Using an On-Board Camera and Sparse Aerial Images. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1263–1269. [Google Scholar]
- Pflueger, M.; Agha, A.; Sukhatme, G.S. Rover-IRL: Inverse Reinforcement Learning with Soft Value Iteration Networks for Planetary Rover Path Planning. IEEE Robot. Autom. Lett. 2019, 4, 1387–1394. [Google Scholar] [CrossRef]
- Gall, C.; Bezzo, N. Gaussian Process-Based Interpretable Runtime Adaptation for Safe Autonomous Systems Operations in Unstructured Environments. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 123–129. [Google Scholar]
- Siva, S.; Wigness, M.; Rogers, J.G.; Quang, L.; Zhang, H. NAUTS: Negotiation for Adaptation to Unstructured Terrain Surfaces. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 1733–1740. [Google Scholar]
Figure 1.
Example of structured environments generated by PanoSim [15].
Figure 1.
Example of structured environments generated by PanoSim [15].

Figure 2.
Some examples of terrains in unstructured environments: (a) unpaved road environments where the original geomorphological capture comes from Baidu Maps; (b) paved roads where the lane boundaries are indistinguishable due to water, snow, or other coverings.
Figure 2.
Some examples of terrains in unstructured environments: (a) unpaved road environments where the original geomorphological capture comes from Baidu Maps; (b) paved roads where the lane boundaries are indistinguishable due to water, snow, or other coverings.

Figure 3.
Path planning approaches in unstructured environments: (a) hierarchical path planning approach; (b) end-to-end path planning approach.
Figure 3.
Path planning approaches in unstructured environments: (a) hierarchical path planning approach; (b) end-to-end path planning approach.

Figure 4.
Partial relevant factors of TTA.

Figure 5.
The types of methods for TTA input, processing, and output.

Table 1.
Comparison of environmental characteristics and path planning between unstructured and structured environments.
Table 1.
Comparison of environmental characteristics and path planning between unstructured and structured environments.
| Contrast Item | Structured Environment | Unstructured Environment | |
|---|---|---|---|
| Environment characteristics | Road environment | Simple variety, less changes, normed geometries, even friction distribution | Intricate and boundless variety, frequent changes, normed and terrain geometries, uneven friction distribution |
| Traffic environment | Lane markings, lane boundaries | No lane markings, no lane boundaries | |
| Global path planning | Road information | Sensing information, high-precision map | Sensing information, geographic map, topographic map, TTA information |
| Planning goal | Shortest distance or shortest time | Lower cost of safety, energy, or comfort | |
| Local path planning | Consideration | Traffic regulation, vehicle dynamics, controlling target | Terrain, traffic regulation, vehicle dynamics, controlling target |
| Obstacles avoidance | Normal vehicles, pedestrians | Normal and special vehicles, pedestrians and animals | |
Table 2.
The existing review articles that have covered path planning of unstructured environments, including this article.
Table 2.
The existing review articles that have covered path planning of unstructured environments, including this article.
| Study | Area Covered | Content Contained | Technology Focused |
|---|---|---|---|
| Wang et al., 2021 [23] | Wheeled vehicles | Perception, navigation | Sensors, collision avoidance methods |
| Guastella et al., 2021 [24] | Autonomous ground vehicles | Perception, navigation | Learning-based methods of TTA and end-to-end navigation |
| Chakraborty et al., 2022 [8] | Agricultural ground vehicles | Path planning | Path planning algorithms and application |
| Bai et al., 2023 [9] | Agricultural ground vehicles | Perception, navigation | Sensors, obstacle avoidance, TTA, location, path planning algorithms |
| Wijayathunga et al., 2023 [25] | Autonomous ground vehicles | Perception, scene understanding, path planning | Sensor fusion, location, map creation, path planning algorithms |
| This article | Autonomous ground vehicles | Path planning | TTA, cost estimation, constraints of terrain and vehicles, path planning algorithms |
Table 3.
Summary and comparison of TTA methods.
| Method | Main Mean | Basis Input | Advantage | Disadvantage | Application |
|---|---|---|---|---|---|
| Cone index method | Experiment | Soil state, vehicle parameters | Comprehensively reflects the mechanical and physical properties of soil | Not suitable for unknown terrains, substantial experimental costs | Traversability assessment on soft soil, widely used in military and agriculture |
| Geometry-based method | Computer technology | Terrain geometric features, vehicle parameters | Not affected by lighting conditions, smoke, shadows, or poor weather | No consideration of terrain physical characteristics | Traversability assessment based on geomorphology |
| Appearance-based method | Computer technology | Images of terrain, vehicle parameters | Low cost of assessment equipment | Affected by lighting conditions, smoke, shadows, or poor weather | Discrete terrain classes assessment |
| Behavior-based method | Computer technology | Driving trajectories, vehicle parameters | Driving experience is taken into account | Inconsistent assessment and difficult to repeat | Traversability assessment based on driving operations |
Table 4.
Overview of different TTA methods published in recent years.
| Study | Sensing Type | Processing Type | Factor Considered | Output Type |
|---|---|---|---|---|
| Mei et al., 2018 [59] | Remoting | Appearance-based | Terrain, vehicle | Classification-based |
| Chavez-Garcia et al., 2018 [35] | In situ | Geometry-based | Terrain | Classification-based |
| Dallas et al., 2020 [47] | In situ | Behavior-based | Terrain, vehicle, vehicle–terrain interaction | Mixed regression and classification |
| Zhu et al., 2020 [32] | Remoting | Behavior-based | Terrain, vehicle | Regression-based |
| Palazzo et al., 2020 [54] | Remoting | Appearance-based | Terrain | Mixed regression and classification |
| Oliveira et al., 2021 [39] | Remoting, in situ | Mixed behavior and geometry | Terrain, vehicle | Mixed regression and classification |
| Wallin et al., 2022 [29] | In situ | Geometry-based | Terrain, vehicle | Regression-based |
| Lee et al., 2023 [60] | Remoting | Mixed behavior and geometry | Terrain, vehicle | Regression-based |
| Xue et al., 2023 [61] | Remoting, in situ | Geometry-based | Terrain | Regression-based |
| Bae et al., 2023 [62] | Remoting | Mixed appearance and geometry | Terrain | Regression-based |
| Guan et al., 2023 [63] | Remoting | Mixed appearance and geometry | Terrain | Mixed regression and classification |
Table 5.
Overview of safety cost considerations and methods published in recent years.
| Study | Cost Considered | Method Estimated |
|---|---|---|
| Gao et al., 2010 [72] | Obstacle avoidance, Wheel slip | Cost function |
| Ono et al., 2015 [27] | Obstacle avoidance | Rollover model and cost function |
| Brandao et al., 2016 [73] | Wheel slip | Slippage model and cost function |
| Li et al., 2019 [67] | Obstacle avoidance, rollover | Rollover model and cost function |
| Sakayori et al., 2021 [13] | Rollover of pitch and roll | Cost function |
| Xiong et al., 2021 [64] | Obstacle avoidance, rollover | Cost function |
| Oliveira et al., 2021 [39] | Rollover of pitch and roll | Cost function and cost map |
| Lee et al., 2023 [60] | Obstacle avoidance, rollover | Cost function |
| Dang et al., 2023 [74] | Obstacle avoidance | Cost function |
Table 6.
Overview of energy cost approaches and considerations in recent years.
| Study | Approach Type | Factor Considered |
|---|---|---|
| Ganganath et al., 2015 [87] | Physics model-based | Terrain slope, friction |
| Higa et al., 2019 [90] | Mixed of data-driven and physics model | Terrain slope, robot’s location, heading angle |
| Wallace et al., 2019 [91] | Physics model-based | Terrain slope, slippage, vehicle speed |
| Quann et al., 2020 [88] | Data-driven | Terrain type, slope, viscosity, vehicle–terrain interaction |
| Sakayori et al., 2021 [13] | Physics model-based | Terrain slope, heading angle, vehicle–terrain interaction |
| Huang et al., 2022 [92] | Data-driven | Terrain slope, driving mode |
| Goulet et al., 2022 [66] | Physics model-based | Terrain elevation, vehicle dynamics, vehicle–terrain interaction, |
| Visca et al., 2022 [51] | Data-driven- | Terrain type, elevation, driving operation |
Table 7.
Overview of global path planning algorithms for unstructured environments.
| Type | Algorithm | Study | Application | Limitation |
|---|---|---|---|---|
| Graph-search-based | A*, Dijkstra | [39,70,108,109,110] | Widely used in global path, global optimal solution, vehicle constraints considered | Not suitable for real-time and complex transformation environments |
| Sampling-based | RRT, PRM | [91,109,111,112] | Probabilistic completeness | Difficult to find the optimal solution |
| APF | APF | [113] | High real-time obstacles avoidance | Falling into the local minimum, not necessarily global optimal solution |
| Optimal method | GDA, PSO, GA | [11,85] | Multi-objective optimization, search efficiency improved | Taking a lot of computing resources and time, falling into local minimum solutions |
Table 9.
Overview of global path planning algorithms for dynamic obstacle avoidance in unstructured environments.
Table 9.
Overview of global path planning algorithms for dynamic obstacle avoidance in unstructured environments.
| Algorithm | Study | Application | Limitation |
|---|---|---|---|
| Dynamic Window Approach | [31,124,125] | High real-time performance | High computational complexity |
| APF | [18,126,127] | Unknown obstacles avoidance | Falling into the local minimum |
| Time Elastic Banding Algorithm | [74,128] | Continuity, smoothness | Poor adaptability for complex situation |
Table 10.
Overview of learning-based algorithms applied in end-to-end path planning.
| Literature | Algorithm | Sensor Data | Application |
|---|---|---|---|
| Holder et al., 2018 [4] | CNN | Stereo camera | Off-road |
| Siva et al., 2019 [19] | Apprenticeship learning | Camera, wheel odometry, motor speed, IMU | Concrete, grass, mud, pebble, rock |
| Pflueger et al., 2019 [131] | Inverse reinforcement learning | Satellite map | Planetary rover |
| Manderson et al., 2020 [130] | Self-supervised learning | Camera, aerial image | Plentiful vegetation, rock, and sandy |
| Josef et al., 2020 [18] | Deep reinforcement learning | IMU, elevation map | Unknown rough terrain |
| Gall et al., 2021 [132] | Gaussian process regression, decision tree | Simulation data from Gazebo | Priori unknown, rough and slippery terrain |
| Siva et al., 2022 [133] | Gaussian process regression | Color camera, LiDAR, GPS, IMU, wheel odometry | Dynamic uncertain grass terrain, unseen forest terrain |
| Lee et al., 2023 [60] | Gaussian process regression | RGB camera, LiDAR | Terrain with different slop, friction coefficient, roughness conditions |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wang, N.; Li, X.; Zhang, K.; Wang, J.; Xie, D. A Survey on Path Planning for Autonomous Ground Vehicles in Unstructured Environments. Machines 2024, 12, 31. https://doi.org/10.3390/machines12010031
AMA Style
Wang N, Li X, Zhang K, Wang J, Xie D. A Survey on Path Planning for Autonomous Ground Vehicles in Unstructured Environments. Machines. 2024; 12(1):31. https://doi.org/10.3390/machines12010031
Chicago/Turabian StyleWang, Nan, Xiang Li, Kanghua Zhang, Jixin Wang, and Dongxuan Xie. 2024. "A Survey on Path Planning for Autonomous Ground Vehicles in Unstructured Environments" Machines 12, no. 1: 31. https://doi.org/10.3390/machines12010031
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.