1. Introduction
In the literature, several reports have surveyed strategies for the cooperation of heterogeneous robots [
1,
2]. One intriguing interaction between heterogeneous robots is a UAV landing on an Unmanned Ground Vehicle (UGV), where the UGV is in motion, requiring the UAV to adjust its velocity to reach the landing spot dynamically [
3]. In Berger et al. [
2], the authors also proposed a similar approach. The UAV can land and return from a UGV base to perform a “hot swapping”. Multi-robot cooperation is also used to perform Coverage Path Planning (CPP). The coordination of heterogeneous robots, including both aerial vehicles and ground-based UGVs, within the framework of CPP presents a promising approach for a wide range of applications due to the possibility of an efficient coverage of large and complex environments [
4].
An important aspect to be mentioned in cooperation between robots is the fact that most of the research in the literature encompasses homogeneous multi-robot systems due to their simplicity and scalability [
5,
6]. The heterogeneity among robot teams enhances performance in various aspects [
6]. This collaboration between heterogeneous robots introduces new challenges, particularly in task allocation, where factors such as robot characteristics (e.g., battery life and coverage area) must be carefully considered [
6]. UGVs can handle substantial payloads, accommodating various sensors and actuators, albeit with limited visibility. In contrast, UAVs offer an elevated viewpoint but are constrained by limited payload capacity and flight time due to power constraints [
3].
Note that integrating aerial and ground robots assign new implementations for advancing the coordination and communication between the robots to guarantee efficient cooperation. Addressing challenges concerning the optimal distribution of tasks across these varied platforms, the efficient management of energy resources, and the assurance of safe interactions in dynamic settings is extremely important. In this sense, it is essential to develop robust algorithms that can flexibly adjust the cooperation of the heterogeneous robot teams to ensure the successful implementation of the coverage path planning with real-world conditions and uncertainties.
UAVs are a promising solution applicable across various domains, including search and rescue [
7,
8], inspection [
9], Industry 4.0 [
10], and remote sensing [
11], among other fields. Over the years, these robots have proven to be valuable tools for exploring complex and dynamic environments [
12,
13]. Their adaptability to tasks of different levels of complexity, capacity to adjust to dynamic surroundings, and agility for maneuvering make them versatile tools for different applications [
14,
15].
In complex and dynamic scenarios, trajectory planning is crucial, enabling UAVs to track targets during missions by following predefined global paths while navigating dynamically [
16]. In dynamic settings, potential obstacles pose challenges for UAVs. That being the case, UAVs must exhibit autonomy to execute various operations and make informed decisions based on available data. Path planning, in particular, demands access to extensive environmental data to ensure credibility, safety, and efficiency [
17]. UAVs face the critical challenge of determining an optimal, or nearly optimal, collision-free route while considering both the initial and target positions. This requires continuous monitoring of the vehicle during its operation. Additionally, the flight time imposes several challenges for this kind of robot.
While UAVs are limited by battery life and flight duration, UGVs typically have higher payload capacity, allowing this kind of robot to carry heavier equipment, sensors, and payloads, making them suitable for applications requiring extensive sensor arrays and can operate for longer periods, especially if equipped with efficient power sources [
2]. In this sense, by integrating these two kinds of robots, UAVs, and UGVs, in an inspection process, which is the case of this research work, diverse terrains and environments can be coverage more effectively. UAVs can provide aerial overviews and reconnaissance, identifying potential obstacles or areas of interest. At the same time, UGVs can navigate complex terrain, investigate ground-level details, and interact with the environment directly if needed. Their different behavior features can improve the inspection process by acquiring environmental data from both aerial and ground-level perspectives, having a continuous inspection, overcoming the individual limitations of each robot, and enhancing overall mission effectiveness.
In an autonomous inspection process, two motion planning strategies based on sensory information acquired from the environment exist: global and local path planning [
18]. The literature presents several solutions for these strategies [
19,
20]. Global path planning involves generating a trajectory from the robot’s current position to the goal while considering the entire environment, whereas local path planning focuses on navigating around obstacles.
Motion planning algorithms are crucial for guiding autonomous robots as they navigate through complex and multi-dimensional environments [
21,
22]. Diverse approaches in the literature rely on heuristic methods for motion planning [
23]. A drawback of these approaches is that they often encounter challenges when applied to high-dimensional settings, which are most common in real-world applications. In response to these challenges, researchers have explored alternative approaches, including using Neural Networks (NN) as online path planners, as demonstrated in Sung et al.’s research [
24].
The training dataset employed for this purpose incorporates the designated paths the robots intend to navigate. NNs offer flexibility and real-time adaptability. This makes then suitable for various applications and dynamic, complex environments. By learning from the training data, NN-based path planners can effectively navigate through environments with varying obstacles and terrain, adjusting their trajectories in real time based on the sensory inputs. Integrating NN-based path-planning techniques into autonomous robot systems can enhance their adaptability and robustness, enabling them to navigate challenging environments more effectively. The NN employed is a promising solution for improving the autonomy and performance of UGVs and UAVs in real-world applications, such as surveillance, exploration, and inspection tasks.
Adaptability becomes an important feature in dynamic environments where sensors may detect unanticipated obstacles. Path planning systems must swiftly respond to these detected obstacles, recalibrating the assigned path to ensure avoidance while progressing toward the final destination [
25]. For example, Zhang et al. [
26] introduced a solution that employs the A* algorithm for global path planning in partially known maps, followed by using the Q-learning method for local path planning to navigate around locally detected obstacles.
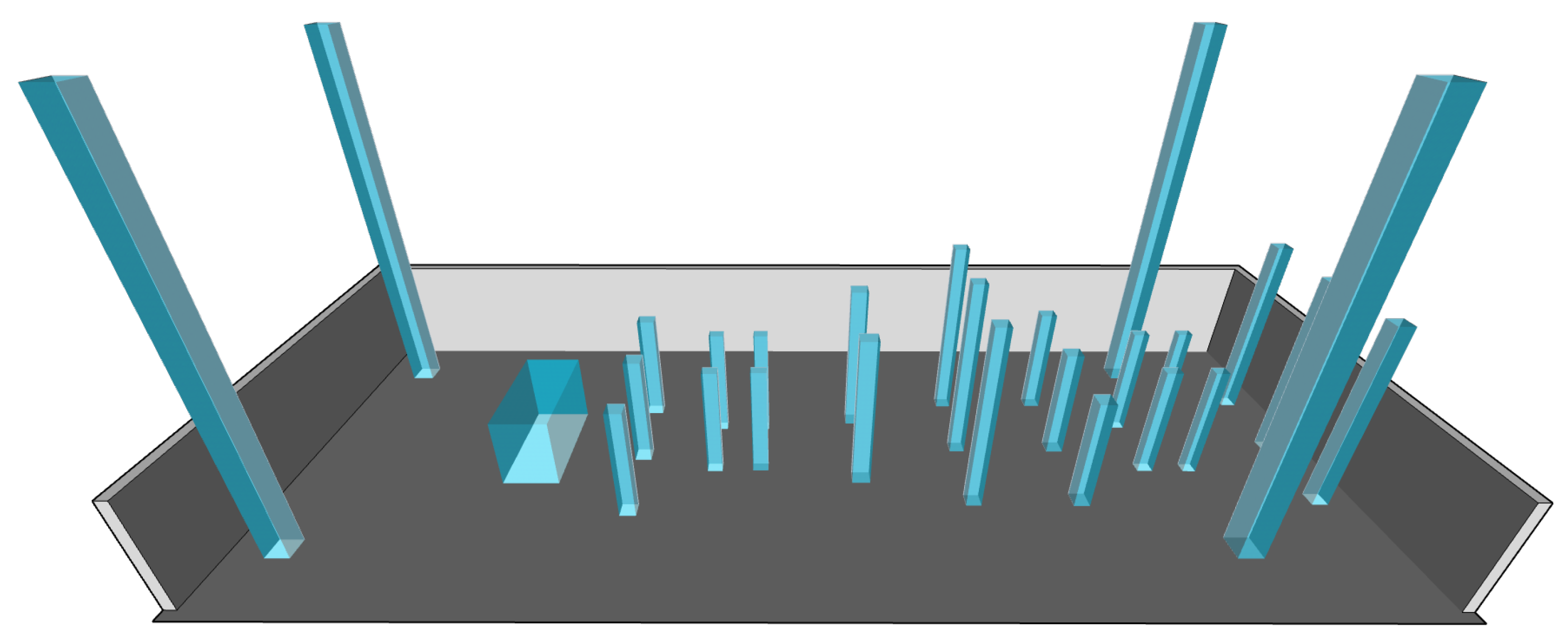
The inspection process is performed in an electrical substation. This environment was chosen due to its critical infrastructure components. Electrical substations require regular inspections and maintenance to ensure operational efficiency and safety. This is a complex scenario for the robots because they can encounter operators in the field as well as cable trays, piping, conduits, and other structural supports that can make their navigation during inspections difficult.
In this work, the authors propose combining online adaptive and coverage path planning algorithms. By integrating DQN into our cooperative robotics framework, we aim to address the challenges associated with dynamic environments, including unanticipated obstacles and changing terrain conditions. The motivation behind this integration is to enable the robotic inspection system to navigate efficiently through the electrical substation, covering all necessary areas while avoiding collisions and hazards. The CPP algorithm generates feasible paths to coverage all inspected area. At the same time, the combination of RRT and DRL techniques enables the robots to dynamically adjust their paths based on real-time sensor data, optimizing coverage and ensuring the inspection of the whole facility.
1.1. Main Contributions
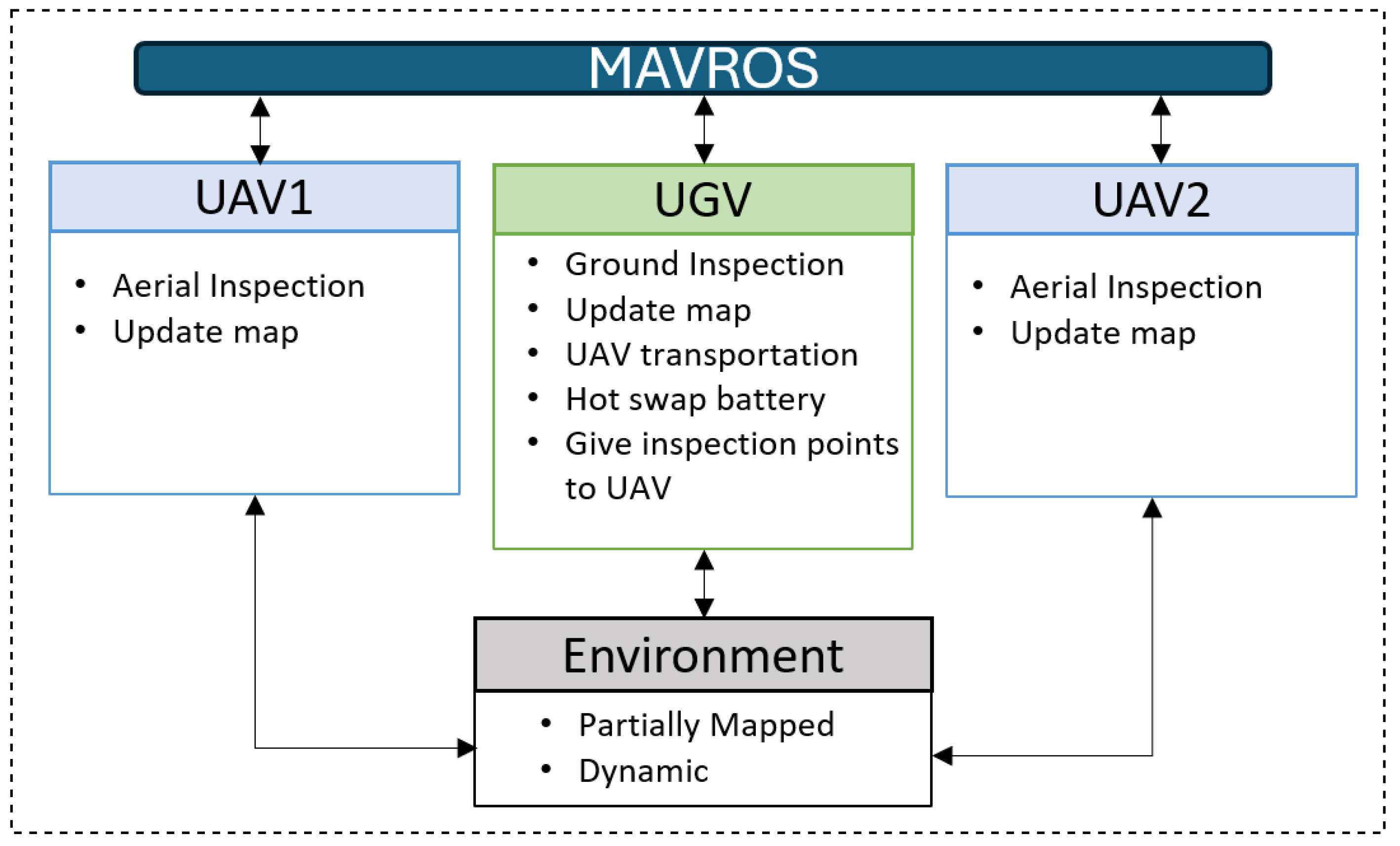
This work introduces a novel cooperation strategy for a heterogeneous group of robots, specifically two UAVs and one UGV. The robots operate to perform an inspection mission. The strategy addresses the challenges of partially known terrains and potential dynamic obstacles, delineating the distinct roles of the UAVs and the UGV within the proposed cooperation framework. The UAVs are tasked with conducting aerial inspections, providing continuous updates to the environmental map, and swiftly navigating complex environments from an elevated high. Simultaneously, the UGV is responsible for ground-level inspections, contributing to map updates, as shown in
Figure 1.
Furthermore, the UGV can serve as a landing point for the UAVs to perform “hot” battery swapping, as demonstrated in the literature [
27,
28]. The main idea is to ensure uninterrupted data collection without constant human intervention, enhancing the overall efficiency of the inspection operation.
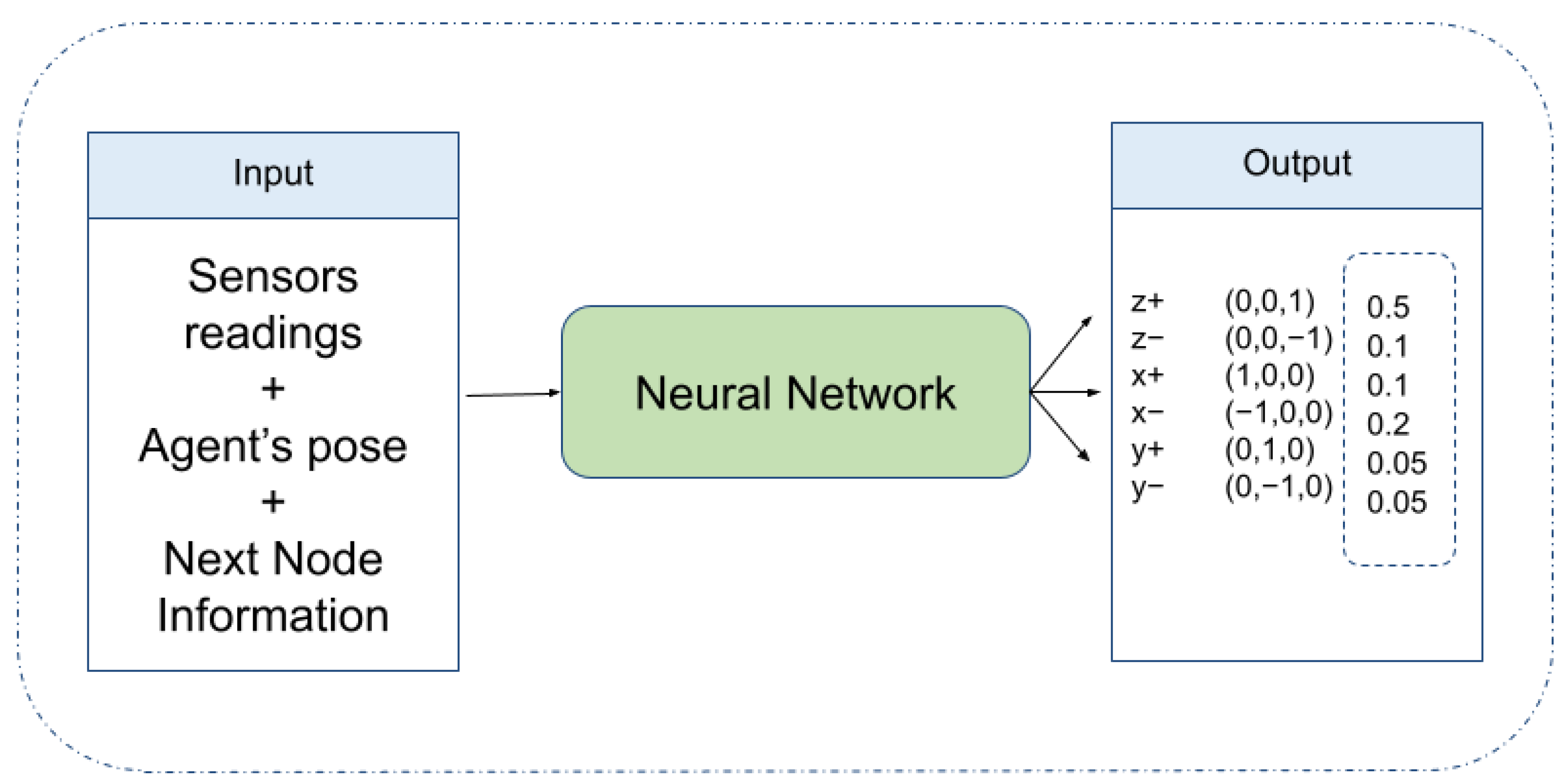
This work also emphasizes the development of an architecture that combines online adaptive and coverage path planning. The CPP algorithm is based on the Wavefront algorithm. All robots must follow the predefined route given by the offline CPP. However, the online adaptive methodology dynamically adjusts the path in real-time. This part of the methodology combines Rapidly Exploring Random Trees (RRT) and Deep Reinforcement Learning (DRL) techniques, similar to Castro et al. [
12]. Different from this mentioned work, the neural network model and the filters associated with the outputs are the same for the UAVs and UGV. Only the input vector assumes other values since the agent’s sensors, the pose, and path next node can differ for each robot. The main contributions of this work can be summarized as follows.
Introducing a cooperation strategy for a group of heterogeneous robots operating in dynamic environments with partial knowledge of the area and with potential dynamic obstacles;
Proposing an effective CPP strategy considering the minimization of travel distance, reducing mission time, and considering constraints like flying time of UAVs;
Assessing the proposed approach by performing tests in a realistic simulation environment as a proof of concept.
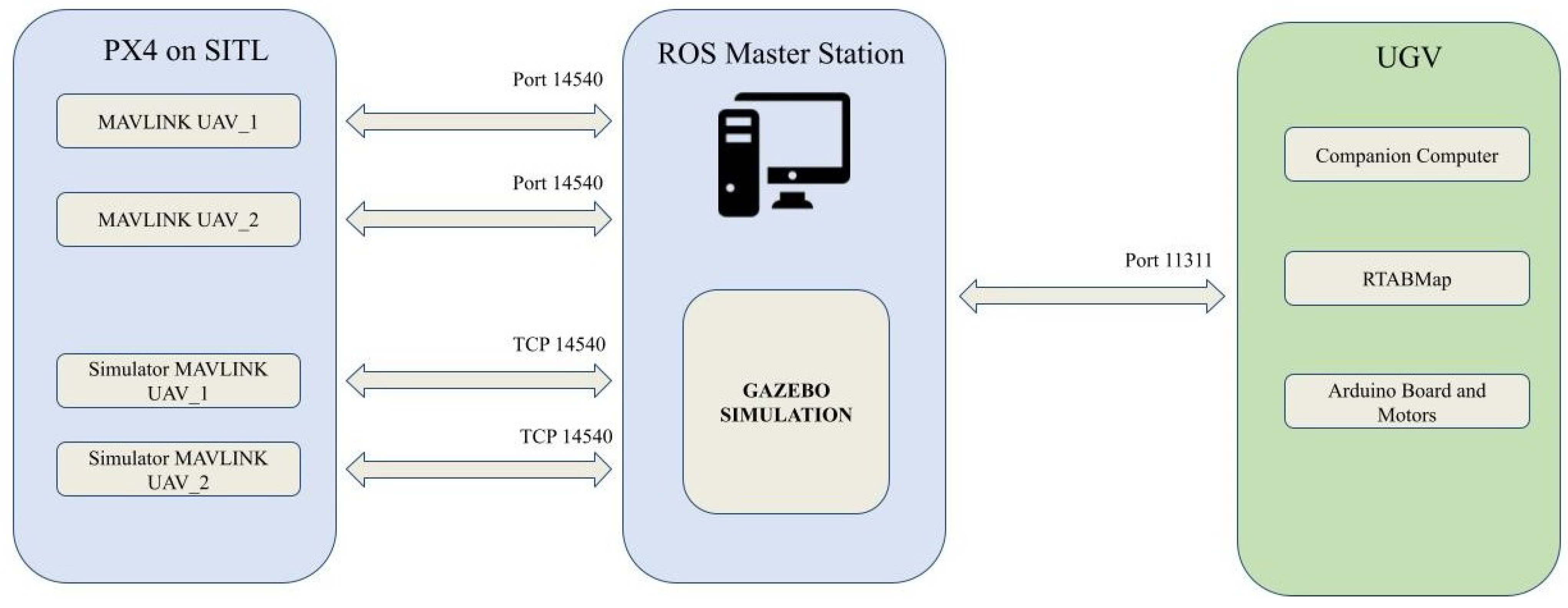
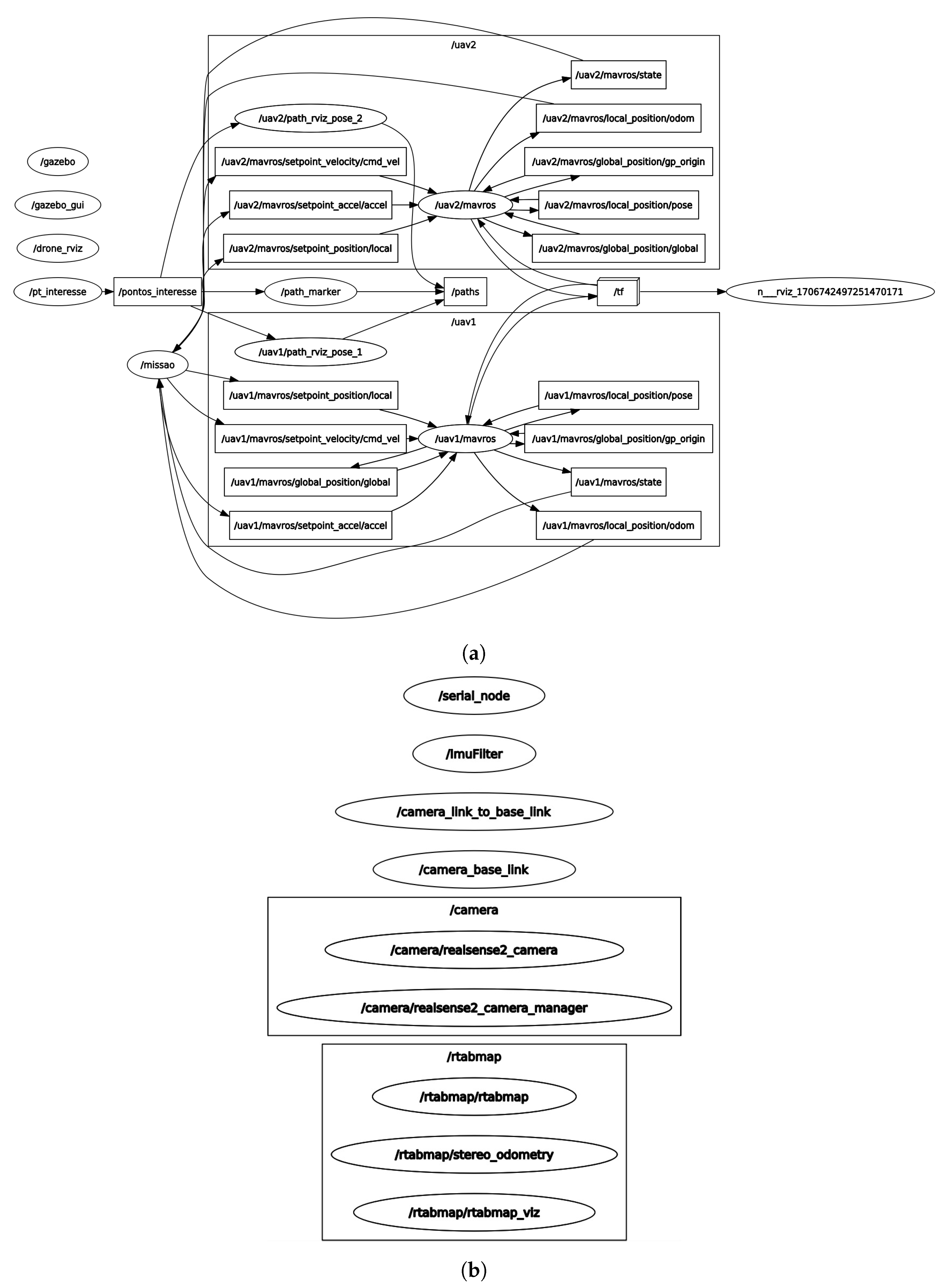
This work does not focus on the details of implementing the image processing algorithm for the inspection process and implementing the “hot-swapping” battery procedure. These aspects fall outside the scope of this research. Extensive simulations are conducted using the Robot Operating System (ROS) and the Gazebo platform to assess the efficacy of the proposed methodology.
1.2. Organization
The rest of this paper is organized as follows.
Section 2.1 provides an overview of related works focusing on cooperation between robots and coverage path planning.
Section 3 presents an overview of the proposed architecture for the partially unknown environment and its mathematical foundations.
Section 4 validates and assesses the proposed strategy. Finally, the concluding remarks and ideas for future work are given in
Section 5.
5. Conclusions and Future Work
This research proposed a strategy to assist the cooperation of heterogeneous robot teams that comprise two UAVs and one UGV. These robots cooperate in an inspection mission of an electrical substation, which is considered a dynamic environment once it has obstacles such as conduits, pipes, structural components, and operators that circulate in this field. The robots have partial knowledge of the environment. The main contributions included the introduction of a novel cooperation path planning framework with a robust CPP algorithm and adaptive path planning for obstacle avoidance. The proposed cooperation strategy gives more capabilities for the UAVs to perform aerial inspections and continuous map updates, while UGV contributes to ground-level inspections and assists the UAVs. Simulations were conducted using ROS and the Gazebo platform. The outcomes demonstrated the functionality of the proposed approach in a semi-realistic environment simulation as proof of concept to demonstrate the robot team’s adaptability through the proposed strategy.
This research presents a potential real-world application. Cooperative robotic systems can be applied in critical infrastructure inspections like industrial plants, network transportation, and promising responses to environmental monitoring, precision agriculture, search and rescue, and urban surveillance. In order to advance from simulated environments to real-world testing, it is important to ensure that the robotic hardware and software systems are robust and reliable for deployment in dynamic, real-world settings. Our robotic system is already simulated in SITL with Ardupilot firmware to minimize discrepancies between simulation and reality. Using Ardupilot firmware in simulation offers several advantages, including simulating real-world scenarios and validating our strategies in a controlled environment. However, extensive testing and validation in controlled environments, such as test facilities or controlled outdoor spaces, are crucial for assessing the system’s functionality, reliability, and safety. In this sense, the authors intend to use real robots in a real-world scenario.
Other future works include the development of strategies for team reconfiguration and collaboration between robots to improve the overall efficiency and adaptability of the system. Investigating methods for efficient information sharing, coordination, and decentralized decision making could lead to more intelligence behaviors among the heterogeneous robot team.


 ,
, 























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}