In order to meet the above requirements, small HAWTs commonly result in being mechanical devices modulating highly variable loads with a small size and a considerable rotational speed: actually, to obtain acceptable values of the ratio between the extracted power and the power carried by the wind (summarized in the power factor
, where
P is the extracted power,
is the air density,
A is the blade swept area and
is the undisturbed wind speed facing the rotor), a small HAWT needs to have rotational speed of the order of several hundreds of revolutions per minute. Furthermore, the urban environment [
9] poses several challenges because of the features of the complex wind flow (sudden wind direction changes [
10], gusts and wind veer induced by obstacles like nearby buildings [
11], turbulence [
12,
13]) and the full conversion of the resource is almost impossible because the wind turbine is not able to optimally follow the wind fluctuations exactly balancing the power production and the electrical load. This fact is supported, for example, in [
14], where the capability of a turbine to effectively adapt its rotational speed in order to satisfy a prescribed control strategy is investigated in light of two parameters: the required rotor acceleration and the available rotor acceleration. A new bound for a reliable estimation of the amount of energy a wind turbine will generate in a specific site is proposed, based on the characteristic time scales of the wind turbine and of the wind resource on site. This suggests that the a priori estimates of small HAWT efficiency (based on numerical simulations and-or steady wind tunnel tests) might not be representative of the actual performances in real environment and it is therefore useful to improve the test protocols (in the design and prototyping phases) taking into account as much as possible the dynamical behavior of the device. Similar arguments had been proposed also in [
15], where the dynamic power reduction of wind turbines is investigated numerically and experimentally, assuming that a steady-state optimal torque control strategy is used. Remarkably, there is a vast amount of literature about the study of the control of MW-scale wind turbines, but there are very few studies about the dynamics of small HAWTs: if this on one hand is comprehensible if one is interested in the scale of produced energy, it is not comprehensible by a scientific point of view because, as supported with the above arguments, the technology, the size, the flow conditions to which small HAWTs are subjected pose very intriguing scientific challenges to the researchers community. An interesting study is [
16]: the aerodynamic performances of two small HAWTs are studied using Computational Fluid Dynamics (CFD) simulations under extreme operating gust and extreme wind direction changes. Some of the conclusions from that work include: compared to wind speed changes, aerodynamic forces adapt more slowly to wind direction changes and, although increasing yaw angle decreases the power available in the wind, at high wind speeds, the shaft torque produced by the rotor may increase with increasing yaw angle. A very interesting manuscript, inspiring for the purposes of this work, is [
17]: a dynamic model of a 5 kW small HAWT has been developed using the FAST software (Fatigue, Aerodynamics, Structures, and Turbulence) (v8, National Wind Technology Center, Golden, CO, USA) and its predictions have been compared against measurements from field testing in highly turbulent position on campus at The University of Newcastle, (New South Wales, Australia). The results show good agreement between steady-state simulations and the nameplate data. The weak point of the modeling chain seems to be that it underpredicts the effect of high turbine yaw on the rotor torque, leading to a difference between predicted and measured shaft speed and power production. This can be interpreted, as discussed also in [
18], in light of the limitations of the numerical model in simulating the tail fin and rotor interactions.
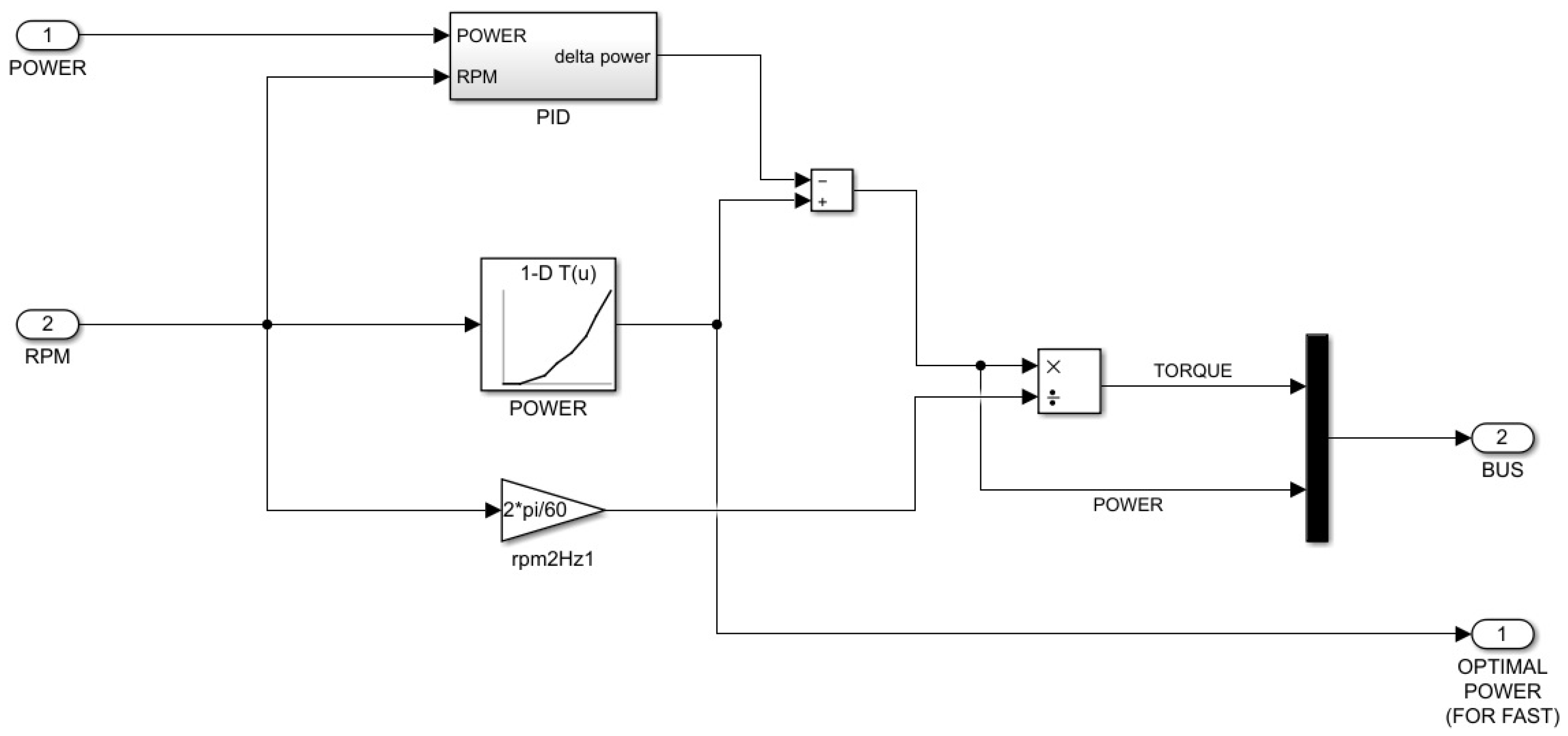
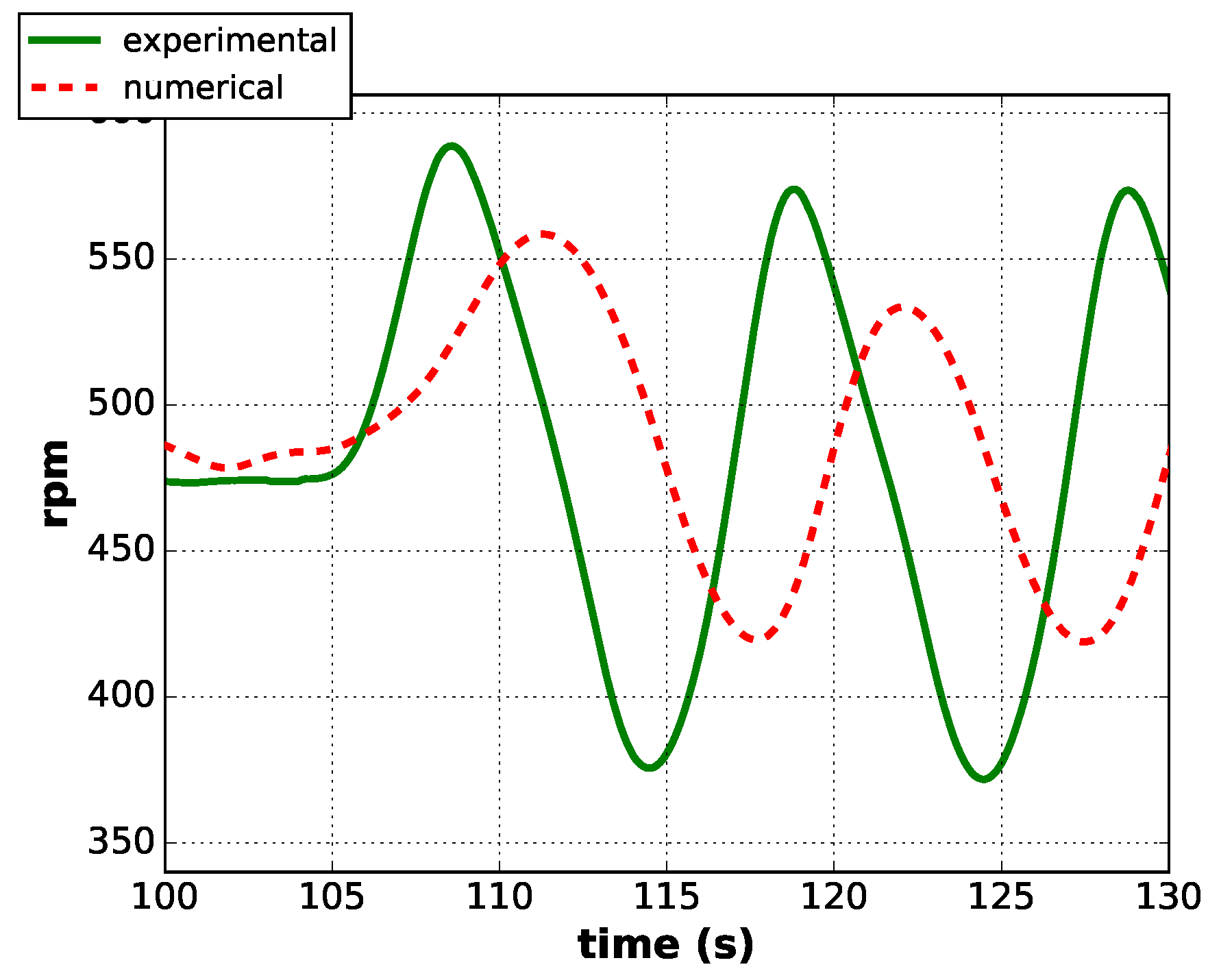
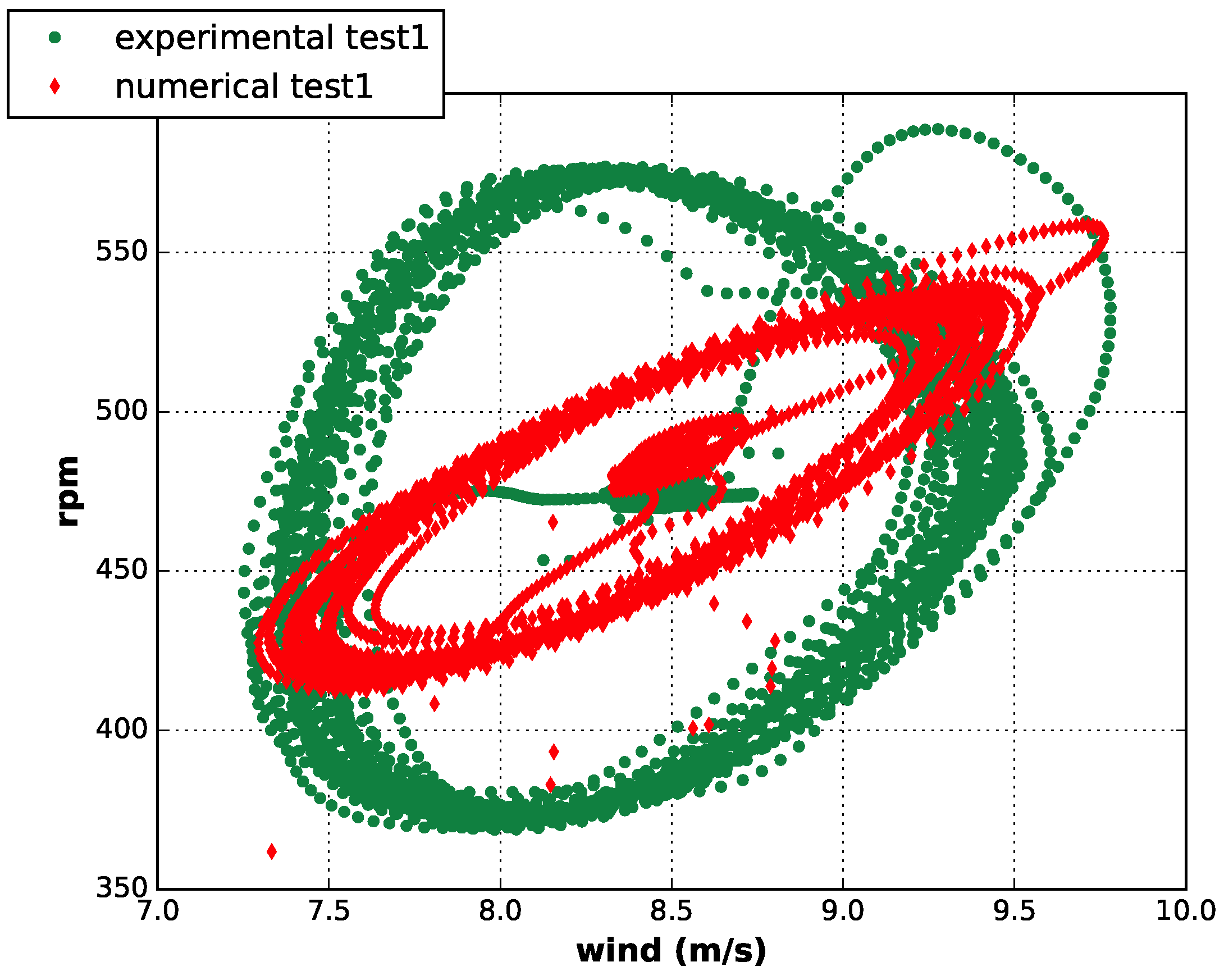
This work poses objectives similar to [
17], in the sense that also this work is a numerical and experimental study of a small HAWT and the numerical simulations are performed with the FAST software. The one-to-one feedback between model and experiment is valuable in order to cross-check the reliability of the model and the robustness of the experimental measurements. There is a considerable difference with respect to [
17] because, while the experimental measurements in [
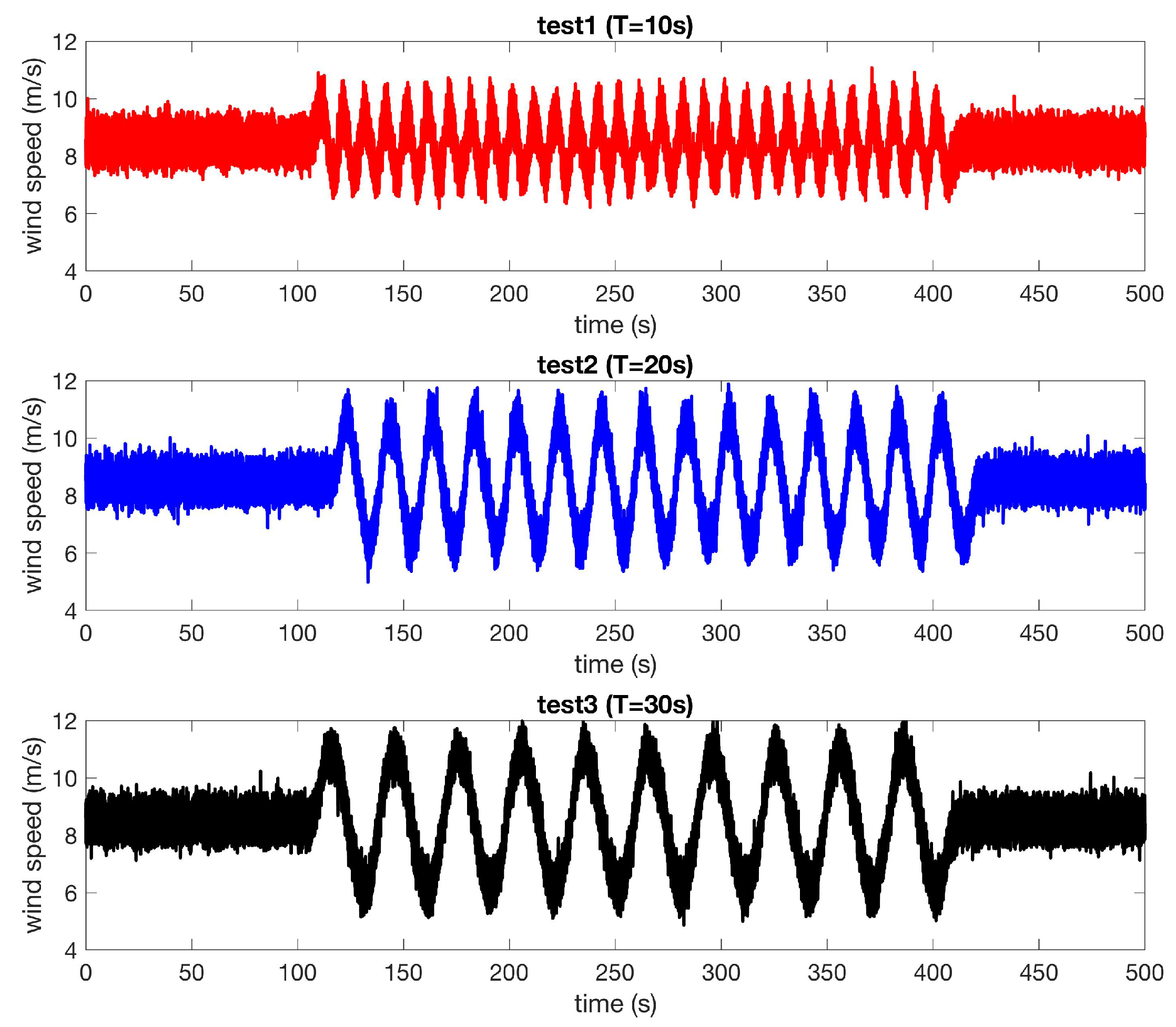
17] have been collected in a field testing in a highly turbulent site (and therefore under random uncontrolled conditions), the purpose of this work is studying the dynamical behavior of a small HAWT under non-stationary conditions that are controlled and repeatable: in particular, the test prototype is subjected to oscillating wind time series, with a custom period. This allows, on one hand, by varying the frequency of the oscillation, to study the dynamical response of the control system by stressing it almost arbitrarily. On the other hand, performing the measurements in the wind tunnel under controlled conditions, the repeatability of the tests is guaranteed.
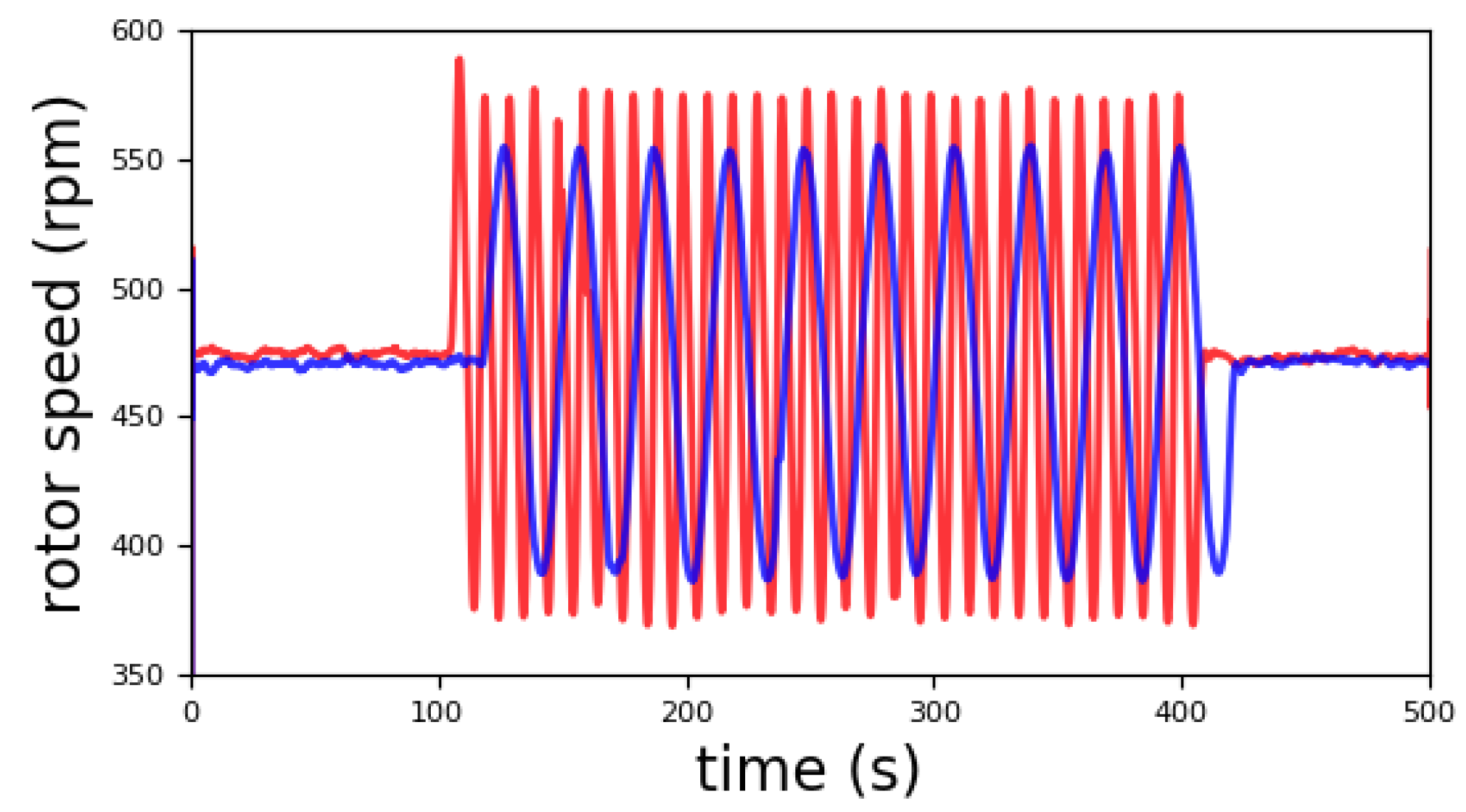
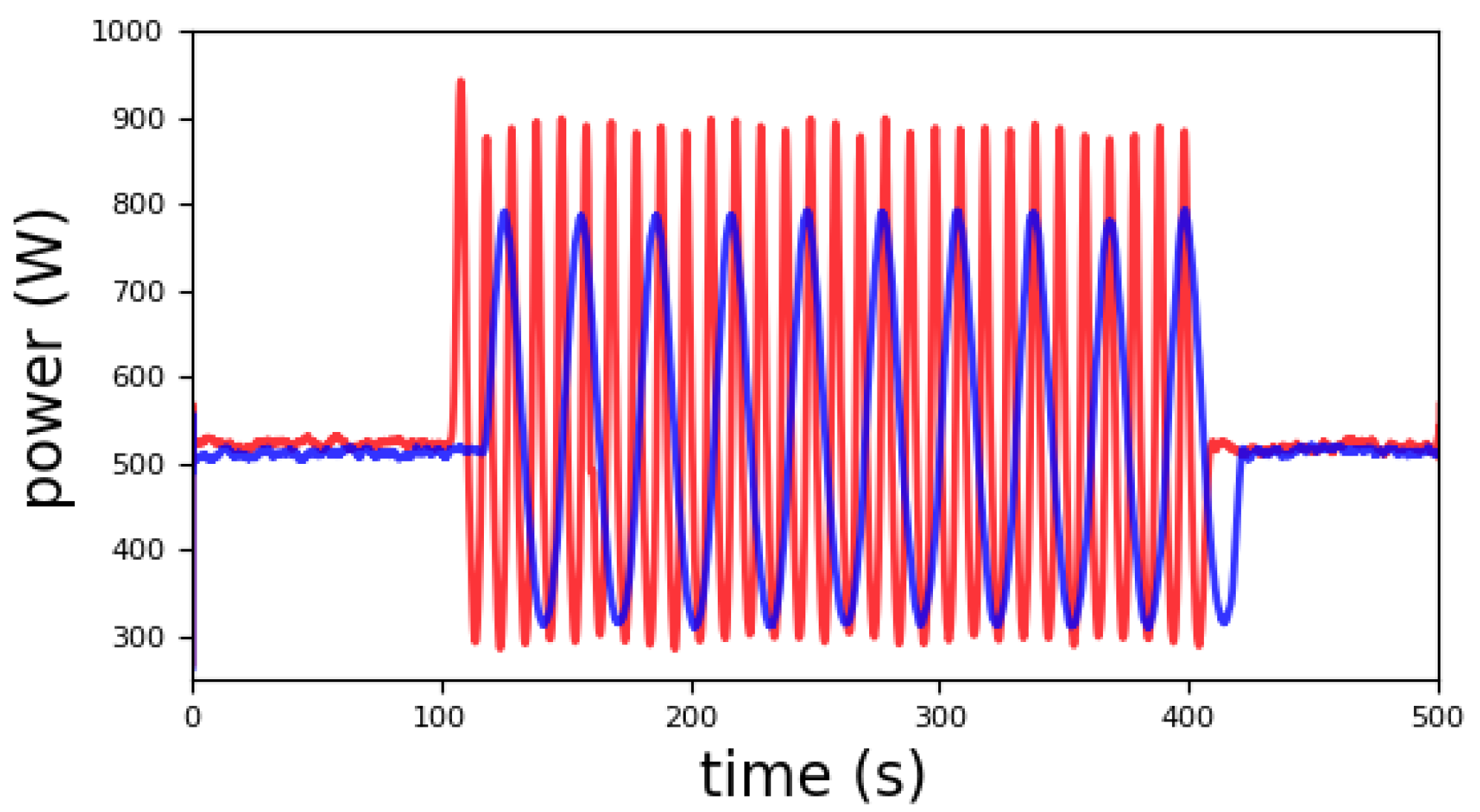
In this work, therefore, a new “unsteady” approach is formulated in order to characterize the dynamical behavior of the small HAWT turbine and of the control system. It consists in investigating the transient response of the machine, in particular in terms of delay and amplitude magnification between a controlled unsteady input (represented by wind speed) and rotor speed and power.
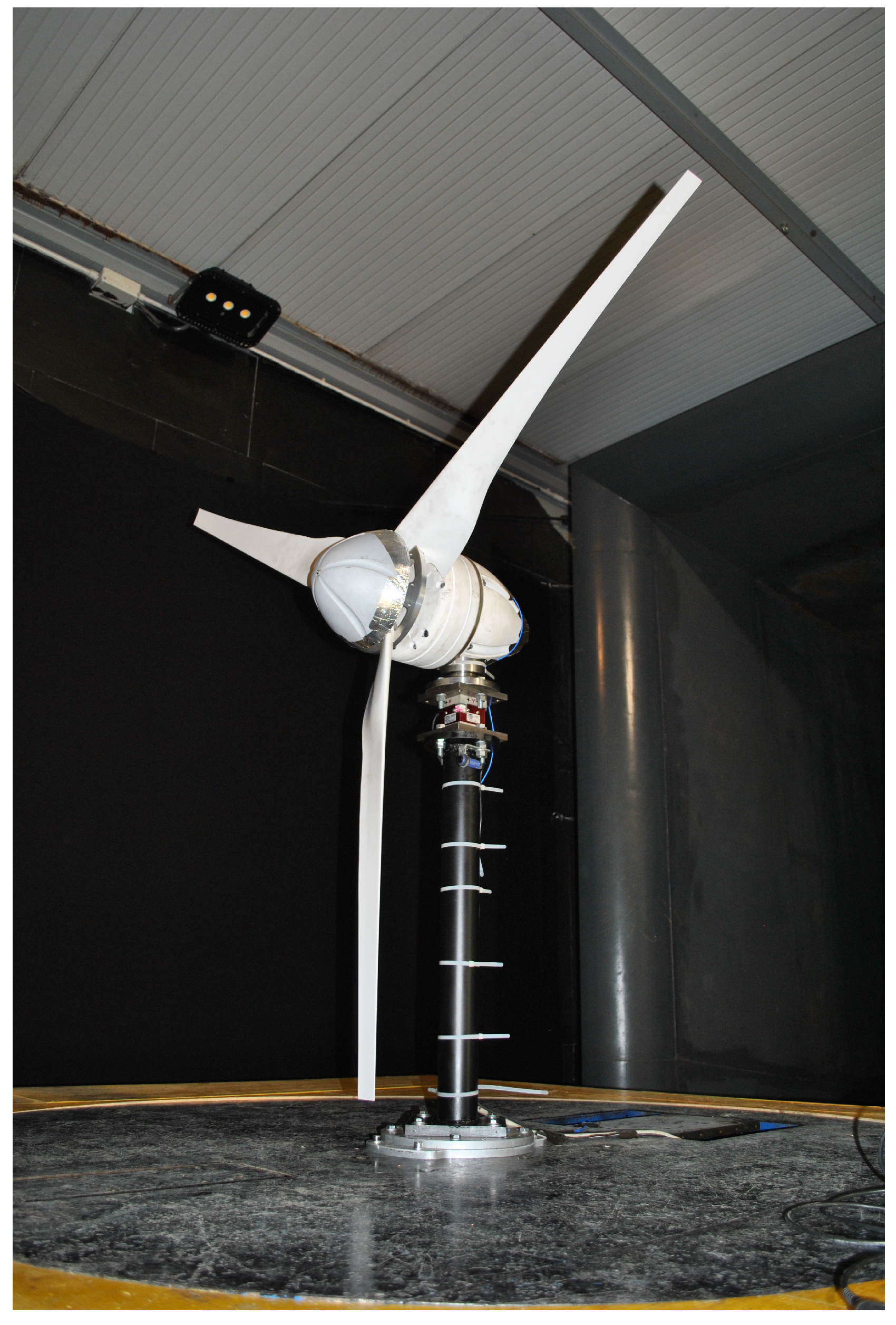
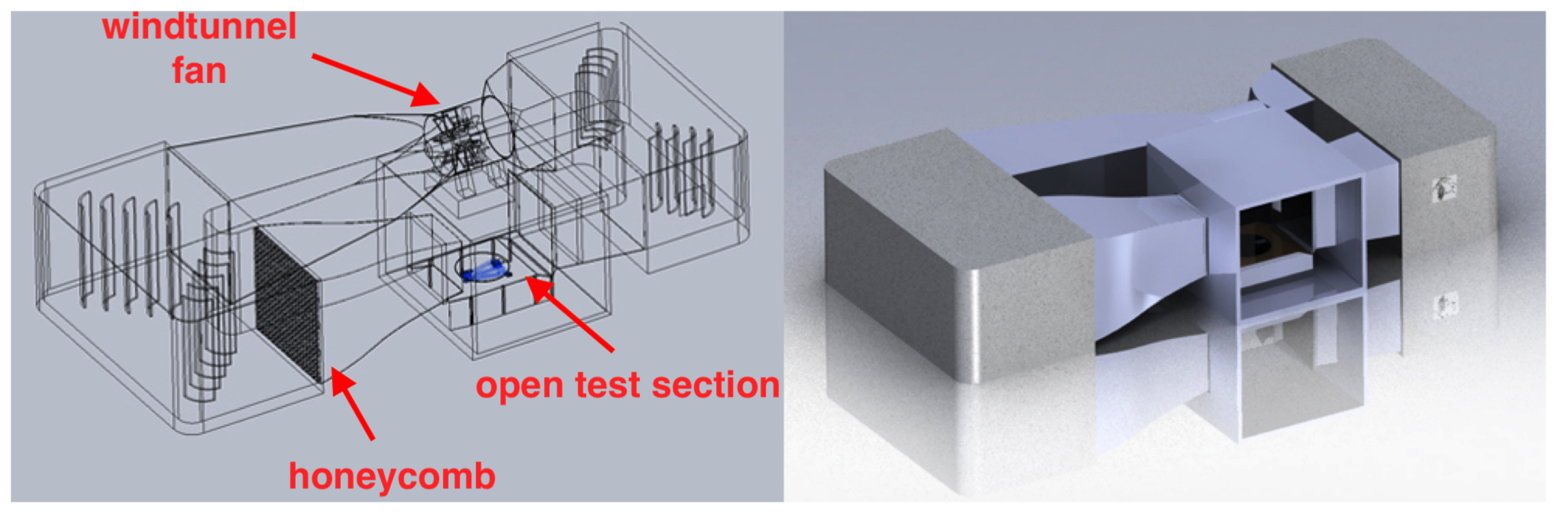
The prototype selected for this work is a small horizontal axis three-bladed wind turbine, having 3 kW of maximum power: the experimental tests have been conducted in the “R. Balli” (
www.windtunnel.unipg.it) Wind Tunnel of the University of Perugia. Previous studies on this test wind turbine have been conducted in [
2] (where the design optimization procedure is described) and in [
18]: the latter work actually reports results about stationary and ramp wind tests, which have resulted in being useful in investigating some mechanical properties, such as the vibration spectra and the natural frequencies of the machine.
The manuscript is organized as follows: in
Section 2, the HAWT prototype and the numerical and experimental methods are described.
Section 3 is devoted to the results’ discussion and, finally, in
Section 4, conclusions are drawn and some further directions of this work are indicated.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}