Calculation and Validation of Planet Gear Sliding Bearings for a Three-Stage Wind Turbine Gearbox


1
Institute of Tribology and Energy Conversion Machinery, Clausthal University of Technology, 38678 Clausthal-Zellerfeld, Germany
2
Envision Energy CoE GmbH, 44629 Dortmund, Germany
*
Author to whom correspondence should be addressed.
Lubricants 2024, 12(3), 95; https://doi.org/10.3390/lubricants12030095
Submission received: 15 February 2024
/
Revised: 5 March 2024
/
Accepted: 9 March 2024
/
Published: 15 March 2024
(This article belongs to the Special Issue Tribology in Germany: Latest Research and Development)
Abstract
:In recent years, the trend towards larger wind turbines and higher power densities has led to increasing demands on planet gear bearings. The use of sliding bearings instead of rolling bearings in planetary bearings makes it possible to increase the power density with lower component costs and higher reliability. Therefore, the use of planet gear sliding bearings in wind turbine gearboxes has become more common. However, the flexible structure and complex load conditions from the helical tooth meshes lead to highly complex elastic structure deformation that modifies the lubricant film thickness and pressure distribution and, thus, has to be considered in the calculation of the bearing’s load-carrying capacity. This paper introduces a highly time-efficient calculation procedure that is validated with pressure measurement data from a three-stage planetary gearbox for a multi-megawatt wind energy plant. The investigations focus on three main objectives: (i) analyses of experimental and predicted results for different load cases, (ii) validation of the results of planet gear sliding bearing code, and (iii) discussion on mandatory modeling depths for the different planet stages. Results indicate the necessity of further research in this field of applications, particularly for the third-stage bearings.
1. Introduction
In recent decades, wind turbine applications for renewable power generation have rapidly grown. Current trends in wind turbine design tend to increase turbine capacity, particularly for offshore plants. While the first offshore farm was installed with 450 kW turbines in 1991, turbine capacities reached 8–10 MW in 2017 [1]. Recently, a 14 MW wind turbine offshore was developed, illustrating the rapid speed in research and market demand in this field [2]. Increasing turbine capacity incorporates new challenges for its components. This fact has led to the application of sliding bearings in planet gear stages, which offer new degrees of freedom for the gearbox design but incorporate load situations that do not exist in other sliding-bearing applications. The axial force components of the helical gear mesh lead to a moment load for the planet bearing that has to be restored by the lubricant film and causes a significant tilting movement between pin and planet that exceeds commonly known levels of misalignment in sliding bearing applications [3]. Moreover, wind turbine operating conditions are characterized by low rotational speeds and heavy loads, which lead to potential mixed friction domains in the entire load and speed range. These properties are accompanied by high demands on lubricant design [4] and require the consideration of wear [5,6]. Lucassen et al. [7] developed a methodology to identify critical operating conditions for planetary sliding bearings at different rotational speeds and torques based on elastohydrodynamic (EHD) predictions.
The extreme load conditions in wind turbine planet bearings are combined with significant structural deformation due to the compact, lightweight design of the gearbox. Prölß [8] investigated the impact of elastic structural deformation, which results in significantly decreased maximum pressure, higher film thickness, and, consequently, less contact intensity and wear. Hagemann et al. [3,9] present a comprehensive theoretical model for sliding planetary gear bearings based on the previous achievements of Prölß [8]. The results show that wear mainly occurs at the bearing edges, and the new resulting shape of the lubricant gap increases the bearing load carrying capacity due to wear. In addition, an optimized axial crowning of the contact partners reduces the local maximum contact intensity and maximum pressure. The elastic structural deformation provides film thicknesses with a low gradient in a circumferential direction of the load zone, which leads to a wider pressure distribution and a lower maximum pressure level. The deformation behavior depends on structural stiffness, which is predominantly influenced by rim thickness, in the case of the planet. This topic has been comprehensively investigated by researchers who study rolling element planet gear bearings. Dong et al. [10] investigate rim deformation for planet gears with rolling bearings and study its effect on the bearing load distribution. The authors obtained an optimal rim thickness for maximum bearing service life. Jones and Harris [11] and Fingerle et al. [12] pointed out that the ratio between mesh forces and rim thickness affects the magnitude of oval deformation of the planet and the service life of rolling element bearings. While general deformation phenomena are comparable for planets with sliding bearings, actual studies on the impact of rim thickness on their operating characteristics are missing.
In general, thermal effects have to be considered in the calculation of sliding bearings starting at a certain level of body temperature increase. Hagemann et al. [13] considered thermo-mechanical deformation in their analysis of a large high-speed turbine journal bearing. The results show a reduction in film thickness and an increase in maximum temperature and pressure for a large five-pad tilting-pad journal bearing that is validated with experimental data. Linjamaa et al. [14] pointed out that the effects of elastic and thermal deformation on journal bearing performance increase as the bearing is heavily loaded. Zhang et al. [15] investigated the relevance of thermal deformation on sliding planet bearings for wind turbine applications and proved their relevance for theoretical analysis. Gong et al. [16] analyzed the radial clearance for journal bearings supporting planet gears (JBSP), considering thermal deformation. The authors found that too tight clearances can lead to too thin films between pins and planets under large thermal deformation. They defined the optimization of the clearance as a task for the design procedure.
The confirmation of theoretical models for planet-bearing analysis requires validation with test results. For this purpose, tests have already been carried out on component test rigs [6,15,17,18]. However, the kinematics and the surrounding structure on these test rigs differ from practical gear units as they represent a replacement system of the actual arrangement and do not feature the carrier as an essential component of the planetary gear stage. In contrast to the test rigs, the planet also rotates around the sun gear, and the planet carrier has a different structural stiffness, which may influence the calculation. Currently, there is a lack of experimental data for sliding planet bearings in the literature. Therefore, this paper presents a planet-bearing analysis validated with its own measurements from a full-scale, three-stage multi-megawatt planetary gearbox. The bearing geometries were designed and optimized prior to testing based on the computational model from ref. [3,9]. All bearings feature an axial crowning to increase minimum film thickness and to ensure that the sliding bearings operate in the hydrodynamic regime in wide ranges of load-speed combinations. The validation procedure indicates that enhancements of the theoretical analyses are required for the third-stage bearings. In particular, local thermal deformation has to be considered as a novel aspect in planet-bearing design for wind turbine gearboxes.
2. Materials and Methods
2.1. Hydrodynamic Bearing Model
The lubricant film pressure in the bearing is calculated with a generalized average Reynolds Equation accounting for three-dimensional viscosity and cavitation, which is solved based on Elrod’s algorithm [19]. For the calculation of the temperature distribution, a three-dimensional energy equation is solved in the gap. The energy equation is coupled with a heat conduction equation of the pin and the planet. A constant temperature distribution in a circumferential direction due to sufficiently high rotational speeds is assumed in the planet. A more detailed description of the bearing model is included in ref. [3].
2.2. Method for Calculation of Planet and Pin Deformation
A weak coupling between fluid and structure analysis is utilized for the simulation of bearing operating behavior under consideration of elastic structural deformation. Based on the assumption of a linear structure model, the constant structural elasticity information resulting from geometries, material properties, and boundary conditions are saved in an a priori-determined reduced stiffness matrix. According to Guyan’s theory [20], the total stiffness matrix can be reduced at the master nodes, i.e., the nodes where the load is applied to the structure. This enables the calculation of deformations with a relaxation at many iteration steps in the planet gear-bearing code to achieve convergence. In this paper, the stiffness matrix is reduced to a sliding surface with 128 nodes in the circumferential direction and 32 nodes in the axial direction. The convergence criteria in the bearing code are set to a maximum local deformation change below 1.0 µm between two iterative steps, and the maximum local pressure modifies by less than 0.1 MPa. More details on the method for calculation of planet and pin deformation can be found in ref. [9].
2.3. Investigated Planet Gear Sliding Bearing
The basic parameters of the three-stage planet gear sliding bearings for a multi-megawatt wind turbine gearbox by the customer are listed in Table 1. The positions of the pressure sensors in the experiment are located in the zone of expected maximum load on the rotor side (RS), generator side (GS), and in the middle of the bearing (Mid). All pins of the three investigated stages feature an axial crowning to ensure a nearly homogeneous pressure distribution in an axial direction of the bearing and to reduce the high edge loading.
2.4. FEM Model for Structure Analysis: Material, Boundary Condition and Mesh Load
The planet gear bearings in the three stages have similar structural features. Figure 1 shows the CAD model of the investigated bearings, with five planets and pins as an example. This model is characterized by the periodic symmetry of the planet carrier. Neglecting any transmission errors, one-fifth of the model is utilized for the FE analyses to calculate the deformation. Additionally, the planet and pin are divided into three and two parts to enable different meshing of the structure, and the contact surfaces between the parts are defined as ‘Bonded’ to treat them as one physical body.
Figure 2 shows the meshes of the planet and pin with carrier. The inner structure of the planet and the outer structure of the pin are both cylindrical geometries and, thus, are discretized hexahedral structural meshes with 128 in circumferential and 32 elements in axial directions. Tetrahedral meshes approximate the remaining structures. In this paper, the models of planet and pin with carrier are discretized to have 173,584 nodes and 391,536 nodes, respectively. Appendix A includes a grid convergence study. Its results indicate that the structural discretization used in this paper is appropriate and has a lower impact on the results than most other uncertainties in the entire simulation procedure.
Figure 3 explains the boundary conditions for the planet and pin with the carrier. For the planet, there are mesh forces via ‘Remote Force’ on the tooth flanks engaging with ring gear and sun gear which are in mechanical equilibrium with the gravity and oil film forces on the sliding surface. In order to avoid the rigid body movement of the planet due to numerical inaccuracies in the mechanical equilibrium, a ‘Remote Displacement’ with zero degree of freedom is defined on the inner surface of the outer structure of the planet (part 3) in Figure 3a while allowing a deformation on this surface. The connection between the pin and carrier in Figure 3b is defined as ‘Bonded’, simulating both components as one body. Furthermore, the tapered rolling element bearings supporting the carrier in the turbine housing structure restrict the radial movement of the carrier. The inner surface on the rotor side of the carrier is defined as ‘fixed’ to provoke the twist deformation caused by the transmitted torque between the rotor hub and generator. Periodic symmetry conditions are set on two cross sections of the one-fifth model of a carrier that interface to the neighboring part.
Table 2 shows the material properties of the planet, pin, and carrier. Since the structural behavior is assumed linear, only Young’s Modulus and Poisson’s Ratio are required to determine the stiffness properties.
Figure 4 shows the three components of the mesh forces on the tooth flanks on the sun gear and ring gear side, as well as their offset positions and from the planet center plane. The sum of the two tangential forces is equal to the oil film force, . The axial force caused by the helix angle of teeth generates an oil film moment of reaction about the x-axis. As the load distribution on the tooth flanks of the investigated three-stage planetary bearings is not homogeneous in the lateral direction, additional oil film moments of reaction are generated about the y-axis.
3. Results
In this section, refers to the relative input torque and 100% corresponds to the nominal load situation with a specific bearing load of 13.5 MPa, 12.7 MPa, and 10.4 MPa for the first to third stages, respectively. Based on a comparison between the predicted minimum film thickness and the roughness of the sliding surfaces, all bearings operate in the hydrodynamic regime for the loads investigated in this paper.
3.1. Predicted Film Thickness and Structure Deformation
The first-stage bearing is utilized as an example to compare the film thickness under part-load 20% and nominal load 100% conditions. The dimensionless axial coordinates 0 and 1 in Figure 5 represent the generator and rotor side of the bearing. As shown by the black point in Figure 5, the minimum film thickness is smaller for the nominal load 100%, with a value of 8.9% of absolute radial clearance. In the area localized by the red line, the film thickness is below 21.1% of absolute radial clearance . A comparison of the results in Figure 5a,b indicates that this area is much larger for the nominal load 100%, as expected. The film thickness in this load zone remains on a level slightly above the minimum film thickness, as shown by the blue line in an angular span ranging from 214° to 338°.
The dimensionless total radial deformations on the sliding surface of the planet and pin for loads 20% and 100% are shown in Figure 6a,b, respectively. The region with the larger deformation is closer to the generator side (GS, 0) for the relative load 20% in Figure 6a due to the mesh force offset position, while an axially more homogenous deformation can be observed for the nominal load case in Figure 6b. Additionally, both deformation fields feature significant local maximum values in the load zone between 240° and 310° as well as in the area 180 degrees offset from it, which exhibits a characteristic oval shape. This property can also be observed in Figure 7 and is caused by the highly flexible planet deformed by the combination of fluid film and mesh forces. From the left to the right, the axial position in Figure 7 shifts from the generator side (GS) to the center (Mid) and the rotor side (RS) of the bearing individually. The radial bearing clearance is expressed in a dimensionless form relative to the absolute radial clearance , where is contour of pin, planet or resultant gap. Figure 7a displays the magnitude of the oval shape for load 20% is decreasing from GS to RS, since local pressure loads concentrate on the GS. In contrast, the resultant contour for load 100% shows the oval shape in Figure 7b over the entire bearing width due to the broader pressure distribution in the axial direction.
3.2. Validation of Pressure Distribution
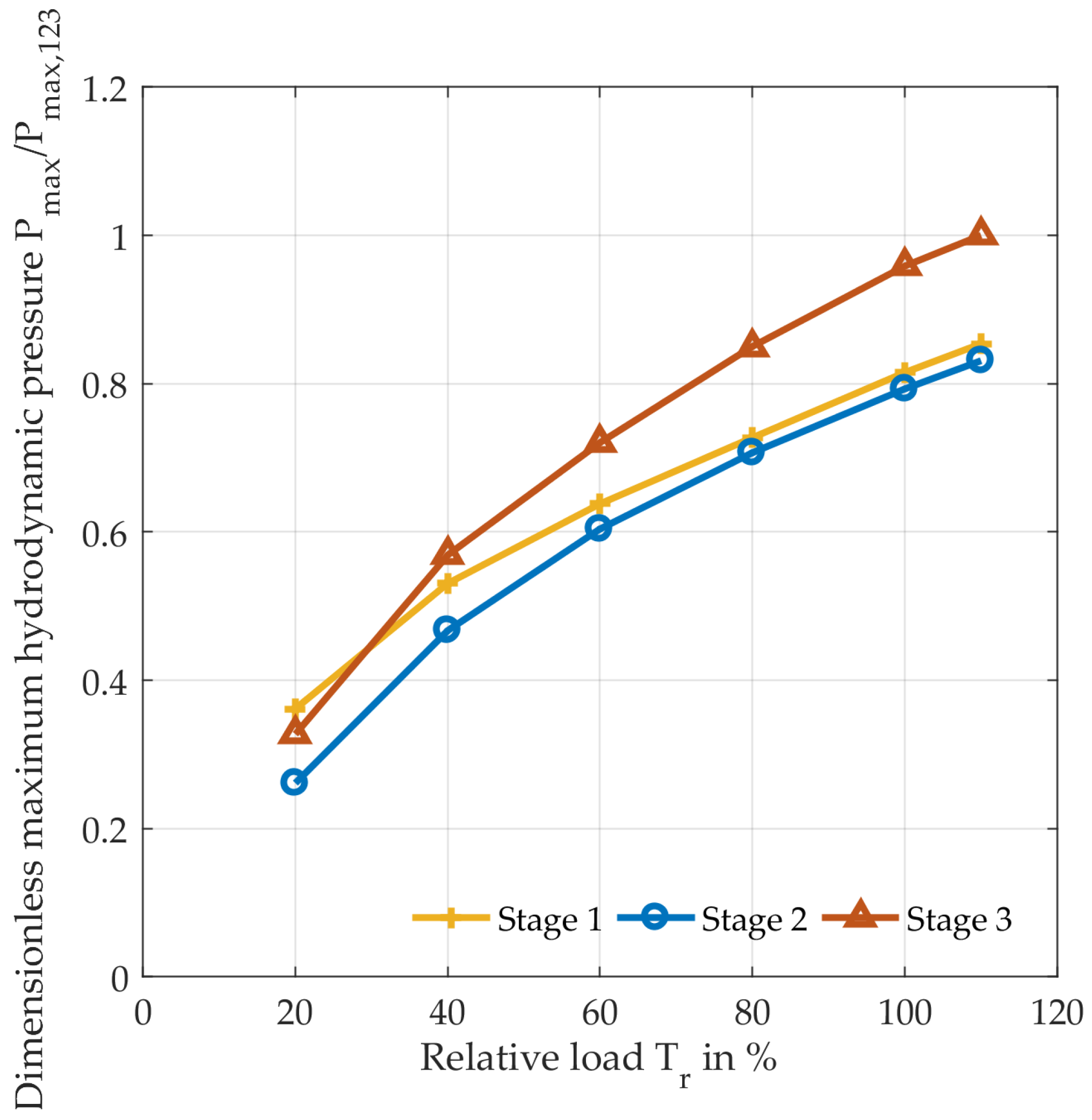
Figure 8 presents the predicted rising trend of the dimensionless maximum hydrodynamic pressure in the planet gear bearings of the three different gear stages for increasing relative loads, where means the maximum of all pressures. The maximum hydrodynamic pressure of third-stage bearing under relative load 40–110% is higher than that of the other two stages, although its nominal specific bearing load is lower.
Figure 9 shows the predicted pressure distribution in the lubricant gap for relative loads of 20%, 60%, and 100%, which is expressed in dimensionless form relative to the maximum pressure at 100% load in each stage. The locations of the three pressure sensors for each pin in the experiment are marked with red points to allow comparison between measured and simulated results. As already discussed for the predicted deformation and film thickness distribution, the pressure in the first-stage bearing for 20% load in Figure 9a is mainly concentrated on the GS due to the additional moment about the y-axis. With a rising load on the bearing, the range of high pressure becomes broader both in axial and circumferential directions. This tendency can be observed for all three stages. However, the circumferential growth of the load section is significantly lower for the third stage. In addition, the planet bearings in the first and second stages exhibit two peak pressure sections with local maxima in a circumferential direction at 100% load, while the third stage has a more homogeneous pressure distribution.
Table 3 includes the dimensionless axial offset positions of the mesh forces on tooth flanks relative to the bearing center for loads 20%, 60%, and 100%, i.e., the lever arms for the moment are represented by and . Positive and negative values of and represent the offset position in the GS and RS direction, respectively. The resulting pressure distribution closer to the generator side for load 20% results from the fact that the values of and in Table 3 are both positive and comparably high, which leads to a moment on the planet about the y-axis. Therefore, it results in a larger elastic deformation of the pin and planet on the GS side, which explains the more significant oval shape on GS in Figure 7a. On the contrary, the absolute values of and for load 100% of the third-stage bearings are quite small, generating a very low additional moment about the y-axis, so the pressure distribution in Figure 9c is more homogeneous in the axial direction.
Experiments were performed to investigate the load-carrying capacity of bearings for loads between 20% and 100% with increments of 10% load. The letters A to G are used to identify different pins of the same bearing stage. If pressure sensors fail during the experiments, their values are omitted. A comparison of the experimental and simulation results over the entire load range is summarized in Figure 10, where the pressures are expressed in dimensionless form relative to the maximum pressure of bearing with and for the respective stage. In addition to the measured and predicted sensor pressures, the maximum predicted pressure on the sliding surface is presented. In combination with Figure 9a,b, the characteristics in Figure 10 show that maximum predicted pressure is located close to a pressure sensor in the case of the second stage bearing while there is a bigger distance between the highest local pressure load and the sensor location in case of the first stage. The simulation only considers mechanically induced deformation and neglects thermal deformation based on the assumption of sufficiently low-temperature levels in this low-speed application. The predicted pressures at the sensor position for the first- and second-stage bearings in Figure 10a,b show very good agreement with the measurement data of all pins at the three axial positions over the entire load range. The deviations are in the range of 0.1 to 5.5% for first- and second-stage, except slightly higher values for the generator side at 20% to 60% load of the first-stage bearing. Combined with the calculation of the load carrying capacity of each bearing in less than ten minutes, this confirms the reliability as well as the efficiency of the planet gear bearing code.
3.3. Extended Thermal Deformation Analysis for the Third Stage
More significant differences between measurement and prediction exist for the third-stage bearing. Figure 11a includes measured and predicted pressures for the third-stage bearing. Deviations become higher with increasing load, particularly for the mid-sensor position.
Table 4 shows that the dimensionless experimental and predicted sliding surface temperatures relative to the oil supply temperature in °C at 100% load increase as the bearing rotational speed rises from a low speed in the first stage to a high speed in the third stage. The oil supply temperature of all bearings in the three stages is the same. The experimental and predicted temperatures of sliding surfaces in the first two stages bearing increase within a range of 18% and 42% of the oil supply temperature, respectively. The previous validation results show that the thermal expansion caused by the increasing temperature has no significant effect on the load-carrying capacity of the first- and second-stage bearings. However, the temperature of the third-stage bearing is much higher and reaches approximately 76% of the oil supply temperature. This temperature increase might incorporate non-negligible thermal deformation of the bearing components. To verify this conjecture, the temperature fields on sliding surfaces of the pin and planet simulated using the THD analysis are applied as external loads to calculate the thermal deformation of the third-stage bearing for loads 20–110%. Since the thermal deformation changes only slightly with modification of the pressure distribution, a one-time calculation of the thermal deformation at the beginning of the analysis is assumed to be sufficient. The shape of the radial thermal deformations is similar for all load cases. Figure 12 presents exemplary results for 100% in dimensionless form for two views. This three-dimensional thermal deformation is approximately parabolic in the axial direction, i.e., the bearing clearance at the bearing edge becomes larger through the positive value at 0 and 1, while it decreases in the bearing center through the negative value. The total thermal deformation of the pin and planet is regarded as an additional offset crowning, which is used together with the original crowning of the pin to recalculate the pressure for the third-stage bearing in the planet gear bearing code. As shown in Figure 11b, these pressures provide a significantly improved correspondence with the experimental pressure at the generator side (GS) and in the bearing center (Mid). Moreover, the results indicate that the position of maximum pressure at maximum torque load is slightly shifted away from the sensor location due to the consideration of thermal deformation as the deviation between the calculated sensor and calculated maximum pressure increases from Figure 11a to Figure 11b.
Results indicate that an enhancement of the modeling depth by thermal deformation is required for the third-stage bearings. Although the validation results in Figure 11b still show some deviation on the rotor side (RS), there is a significant improvement in the agreement of measured and predicted results.
4. Discussion and Conclusions
This paper investigated the load-carrying capacity of the planet gear sliding bearings for three gear stages of a multi-megawatt wind turbine gearbox. For this purpose, the bearings are analyzed both experimentally and theoretically within a detailed thermo-elasto-hydrodynamic simulation considering the structural deformation. The deformation, oil film thickness, and pressure distribution are analyzed for the entire load range. Comparisons of measured and predicted hydrodynamic pressures provide very good agreement for the first- and second-stage bearings if only mechanical deformation induced by the film pressure is modeled. Results indicate that this approach is not sufficient for the third stage bearings, as deviations between simulation and experiment occur. Here, the additional consideration of approximative thermal deformation that predominantly shows a shape similar to an axial crowning of the pin leads to a significant improvement in simulation results. The simplified approach for the consideration of thermal deformation assumes that a one-time calculation of thermal deformation at the beginning of the analyses is sufficient as thermal deformation only slightly changes by the modification of the pressure distribution. However, the deviations between measurement and prediction remain on an unacceptable level, indicating that a more detailed thermal deformation analysis might be necessary to close the gap between experimental and theoretical results for the third stage. An alignment of the consideration of thermal deformation with the procedure for mechanical one seems to be promising, but the entire calculation procedure should be kept on a complexity level that fulfills the real-time expectations of industrial practice.
Author Contributions
Conceptualization, methodology, T.H. and H.D.; software, H.D.; validation, H.D. and Ü.M.; investigation, writing, and visualization, H.D.; supervision and funding acquisition, H.S. and Ü.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
Author Ümit Mermertas was employed by the company Envision Energy CoE GmbH. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Appendix A. Grid Convergence Study
The grid convergence study is carried out by calculating the radial deformation of a sliding surface at 270° across the bearing width for different grid densities of planet and pin with carrier in third-stage bearing as in Figure A1 and Figure A2. The radial deformations are shown in a dimensionless form relative to their maximum value of planet and pin. The results in Table A1 and Table A2 demonstrate that the deviation of the selected mesh density from the maximum mesh density is 0.4% and 0.01% for planet and pin with carrier, respectively.
Figure A1.
Dimensionless radial deformation of sliding surface at 270° across the bearing width for different grid densities of a planet in third-stage bearing.
Figure A1.
Dimensionless radial deformation of sliding surface at 270° across the bearing width for different grid densities of a planet in third-stage bearing.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Deviation of dimensionless radial deformation of the sliding surface at 270° and 0.55 for different grid densities from the maximum mesh density of the planet in third-stage bearing.
Table A1.
Deviation of dimensionless radial deformation of the sliding surface at 270° and 0.55 for different grid densities from the maximum mesh density of the planet in third-stage bearing.
| Nodes Number | Radial Deformation, - | Deviation, % |
|---|---|---|
| 345,781 | 0.8329 | - |
| 241,641 | 0.8314 | 0.18 |
| 173,584 | 0.8297 | 0.39 |
| 144,901 | 0.8283 | 0.55 |
| 123,672 | 0.8220 | 1.30 |
| 87,314 | 0.8187 | 1.70 |
Figure A2.
Dimensionless radial deformation of sliding surface at 270° across the bearing width for different grid densities of pins with a carrier in third-stage bearing.
Figure A2.
Dimensionless radial deformation of sliding surface at 270° across the bearing width for different grid densities of pins with a carrier in third-stage bearing.

Table A2.
Deviation of dimensionless radial deformation of the sliding surface at 270° and 0.3718 for different grid densities from the maximum mesh density of pin with a carrier in third-stage bearing.
Table A2.
Deviation of dimensionless radial deformation of the sliding surface at 270° and 0.3718 for different grid densities from the maximum mesh density of pin with a carrier in third-stage bearing.
| Nodes Number | Radial Deformation, - | Deviation, % |
|---|---|---|
| 606,630 | −0.8558 | - |
| 462,006 | −0.8559 | 0.02 |
| 391,536 | −0.8559 | 0.01 |
| 283,067 | −0.8561 | 0.04 |
| 200,122 | −0.8563 | 0.06 |
References
- Díaz, H.; Guedes Soares, C. Review of the Current Status, Technology and Future Trends of Offshore Wind Farms. Ocean Eng. 2020, 209, 107381. [Google Scholar] [CrossRef]
- Offshore Wind Turbine SG 14-222 DD|Siemens Gamesa. Available online: https://www.siemensgamesa.com/products-and-services/offshore/wind-turbine-sg-14-222-dd (accessed on 13 February 2024).
- Hagemann, T.; Ding, H.; Radtke, E.; Schwarze, H. Operating Behavior of Sliding Planet Gear Bearings for Wind Turbine Gearbox Applications—Part I: Basic Relations. Lubricants 2021, 9, 97. [Google Scholar] [CrossRef]
- Muzakkir, S.M.; Hirani, H.; Thakre, G.D. Lubricant for Heavily Loaded Slow-Speed Journal Bearing. Tribol. Trans. 2013, 56, 1060–1068. [Google Scholar] [CrossRef]
- Xiang, G.; Han, Y.; Wang, J.; Wang, J.; Ni, X. Coupling Transient Mixed Lubrication and Wear for Journal Bearing Modeling. Tribol. Int. 2019, 138, 1–15. [Google Scholar] [CrossRef]
- Lehmann, B.; Trompetter, P.; Guzmán, F.G.; Jacobs, G. Evaluation of Wear Models for the Wear Calculation of Journal Bearings for Planetary Gears in Wind Turbines. Lubricants 2023, 11, 364. [Google Scholar] [CrossRef]
- Lucassen, M.; Decker, T.; Gutierrez Guzman, F.; Lehmann, B.; Bosse, D.; Jacobs, G. Simulation Methodology for the Identification of Critical Operating Conditions of Planetary Journal Bearings in Wind Turbines. Forsch. Im Ingenieurwesen 2023, 87, 147–157. [Google Scholar] [CrossRef]
- Prölß, M. Berechnung langsam laufender und hoch belasteter Gleitlager in Planetengetrieben unter Mischreibung. Verschleiß Und Deform. 2020. [Google Scholar] [CrossRef]
- Hagemann, T.; Ding, H.; Radtke, E.; Schwarze, H. Operating Behavior of Sliding Planet Gear Bearings for Wind Turbine Gearbox Applications—Part II: Impact of Structure Deformation. Lubricants 2021, 9, 98. [Google Scholar] [CrossRef]
- Dong, P.; Lai, J.; Guo, W.; Tenberge, P.; Xu, X.; Liu, Y.; Wang, S. An Analytical Approach for Calculating Thin-Walled Planet Bearing Load Distribution. Int. J. Mech. Sci. 2023, 242, 108019. [Google Scholar] [CrossRef]
- Jones, A.B.; Harris, T.A. Analysis of a Rolling-Element Idler Gear Bearing Having a Deformable Outer-Race Structure. J. Basic Eng. 1963, 85, 273–278. [Google Scholar] [CrossRef]
- Fingerle, A.; Hochrein, J.; Otto, M.; Stahl, K. Theoretical Study on the Influence of Planet Gear Rim Thickness and Bearing Clearance on Calculated Bearing Life. J. Mech. Des. 2019, 142. [Google Scholar] [CrossRef]
- Hagemann, T.; Kukla, S.; Schwarze, H. Measurement and Prediction of the Static Operating Conditions of a Large Turbine Tilting-Pad Bearing Under High Circumferential Speeds and Heavy Loads. In Proceedings of the ASME Turbo Expo 2013: Turbine Technical Conference and Exposition, San Antonio, TX, USA, 3–7 June 2013. [Google Scholar] [CrossRef]
- Linjamaa, A.; Lehtovaara, A.; Larsson, R.; Kallio, M.; Söchting, S. Modelling and Analysis of Elastic and Thermal Deformations of a Hybrid Journal Bearing. Tribol. Int. 2018, 118, 451–457. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, Q.; Zhang, Y.; Zhu, J.; Wang, M.; Feng, K. Numerical and Experimental Investigations on Thermoelastic Hydrodynamic Performance of Planetary Gear Sliding Bearings in Wind Turbine Gearboxes. Tribol. Int. 2024, 191, 109081. [Google Scholar] [CrossRef]
- Gong, J.; Liu, K.; Zheng, Y.; Meng, F. Thermal-Elastohydrodynamic Lubrication Study of Misaligned Journal Bearing in Wind Turbine Gearbox. Tribol. Int. 2023, 188, 108887. [Google Scholar] [CrossRef]
- Goris, S.; Ooms, M.; Goovaerts, M.; Krieckemans, K.; Bogaert, R. Plain Bearings for Wind Turbine Gearboxes-Trajectory towards Technology Readiness. In Proceedings of the Conference for Wind Power Drives 2017: Tagungsband zur Konferenz, Aachen, Germany, 7–8 March 2017; p. 327. [Google Scholar]
- Meyer, T. Validation of Journal Bearings for Use in Wind Turbine Gearboxes|Wind Systems Magazine. Available online: https://www.windsystemsmag.com/validation-of-journal-bearings-for-use-in-wind-turbine-gearboxes/ (accessed on 31 January 2024).
- Elrod, H.G. A Cavitation Algorithm. J. Lubr. Technol. 1981, 103, 350–354. [Google Scholar] [CrossRef]
- Guyan, R.J. Reduction of Stiffness and Mass Matrices. AIAA J. 1965, 3, 380. [Google Scholar] [CrossRef]
Figure 1.
CAD model of planet gear sliding bearing.

Figure 2.
Mesh of pin with carrier (a) and planet (b).

Figure 3.
Boundary condition of planet (a), and pin with carrier (b).

Figure 4.
Mesh forces on the tooth flanks.

Figure 5.
Film thickness for 20% (a) and 100% (b) loads of first-stage bearing.

Figure 6.
Total deformation field for 20% (a) and 100% (b) loads of first-stage bearing.

Figure 7.
Gap contour for 20% (a) and 100% (b) loads of first-stage bearing.

Figure 8.
Maximum hydrodynamic pressure for variable relative loads 20–110% for the bearings in the three stages.
Figure 8.
Maximum hydrodynamic pressure for variable relative loads 20–110% for the bearings in the three stages.

Figure 9.
Pressure distributions for 20%, 60%, and 100% loads of first- (a), second- (b), and third-stage (c) bearing.
Figure 9.
Pressure distributions for 20%, 60%, and 100% loads of first- (a), second- (b), and third-stage (c) bearing.

Figure 10.
Comparison of pressure between measurement and prediction for the entire load range 20–110% of first- (a) and second-stage (b) bearing.
Figure 10.
Comparison of pressure between measurement and prediction for the entire load range 20–110% of first- (a) and second-stage (b) bearing.

Figure 11.
Comparison of pressure between measurement and prediction for the entire load range 20–110% of without (a) and with (b) thermal expansion of third-stage bearing.
Figure 11.
Comparison of pressure between measurement and prediction for the entire load range 20–110% of without (a) and with (b) thermal expansion of third-stage bearing.

Figure 12.
The sum of dimensionless radial thermal deformation on the sliding surface of pin and planet for nominal load 100% for third-stage bearing.
Figure 12.
The sum of dimensionless radial thermal deformation on the sliding surface of pin and planet for nominal load 100% for third-stage bearing.

Table 1.
Three-stage planet gear sliding bearing parameters.
| Parameter | Stage 1 | Stage 2 | Stage 3 |
|---|---|---|---|
| Bearing width/diameter, - | 1.5 | 1.2 | 0.83 |
| Nominal rotational speed, rpm | 30 | 85 | 271 |
| Nominal specific bearing load, MPa | 13.5 | 12.7 | 10.4 |
| Lubricant | ISO VG 320 | ||
| Lubricant density kg/m3 | 853 @ 40 °C | ||
| Lubricant specific heat capacity kJ/(kg·K) | 2.0 @ 20 °C | ||
| Lubricant thermal conductivity, W/(m·K) | 0.13 | ||
Table 2.
Material properties.
| Parameter | Planet | Pin | Carrier |
|---|---|---|---|
| Young’s Modulus, MPa | 210,000 | 210,000 | 176,000 |
| Poisson’s Ratio, - | 0.3 | 0.3 | 0.275 |
Table 3.
Dimensionless axial offset position relative to the bearing center for three-stage planet gear sliding bearing.
Table 3.
Dimensionless axial offset position relative to the bearing center for three-stage planet gear sliding bearing.
| Stage 1 | Stage 2 | Stage 3 | ||||
|---|---|---|---|---|---|---|
| Offset a | Offset b | Offset a | Offset b | Offset a | Offset b | |
| 20% | 0.38 | 0.19 | 0.13 | 0.14 | 0.021 | 0.35 |
| 60% | 0.18 | −0.09 | 0.09 | −0.04 | 0.031 | 0.12 |
| 100% | 0 | −0.22 | 0.03 | −0.11 | 0.021 | 0.021 |
Table 4.
Comparison of dimensionless temperature from sensor and prediction for 100% of three-stage planet gear bearings.
Table 4.
Comparison of dimensionless temperature from sensor and prediction for 100% of three-stage planet gear bearings.
| Stage 1 | Stage 2 | Stage 3 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| GS | Mid | RS | GS | Mid | RS | GS | Mid | RS | |
| Avg. exp. , - | 1.13 | 1.1 | 1.13 | 1.34 | 1.37 | 1.42 | 1.67 | 1.74 | 1.76 |
| Calc. , - | 1.18 | 1.17 | 1.15 | 1.4 | 1.38 | 1.36 | 1.64 | 1.69 | 1.65 |
| Deviation , % | 4.4 | 6.2 | 1.8 | 4.6 | 0.6 | 3.7 | 1.4 | 3.0 | 6.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ding, H.; Mermertas, Ü.; Hagemann, T.; Schwarze, H. Calculation and Validation of Planet Gear Sliding Bearings for a Three-Stage Wind Turbine Gearbox. Lubricants 2024, 12, 95. https://doi.org/10.3390/lubricants12030095
AMA Style
Ding H, Mermertas Ü, Hagemann T, Schwarze H. Calculation and Validation of Planet Gear Sliding Bearings for a Three-Stage Wind Turbine Gearbox. Lubricants. 2024; 12(3):95. https://doi.org/10.3390/lubricants12030095
Chicago/Turabian StyleDing, Huanhuan, Ümit Mermertas, Thomas Hagemann, and Hubert Schwarze. 2024. "Calculation and Validation of Planet Gear Sliding Bearings for a Three-Stage Wind Turbine Gearbox" Lubricants 12, no. 3: 95. https://doi.org/10.3390/lubricants12030095
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.