1. Introduction
Crop pests cause serious harm to crop growth [
1]. Accurate detection of different pests and the implementation of corresponding control measures can effectively improve crop yield and quality, which are crucial for agricultural production. One such destructive insect pest is the fall armyworm,
Spodoptera frugiperda (Smith), flagged as a major concern by the Food and Agriculture Organization of the United Nations (FAO) [
2,
3]. Field investigations have revealed that
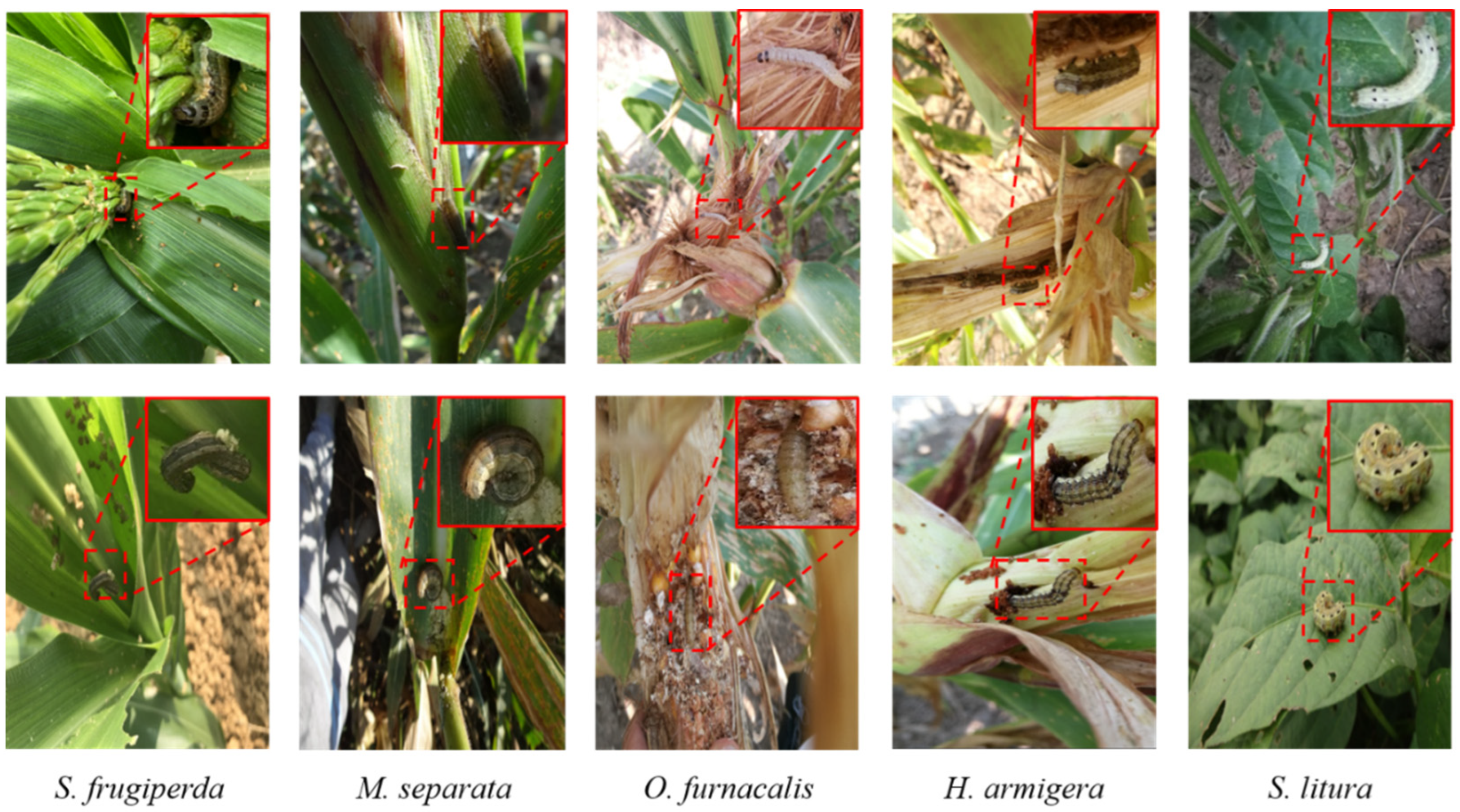
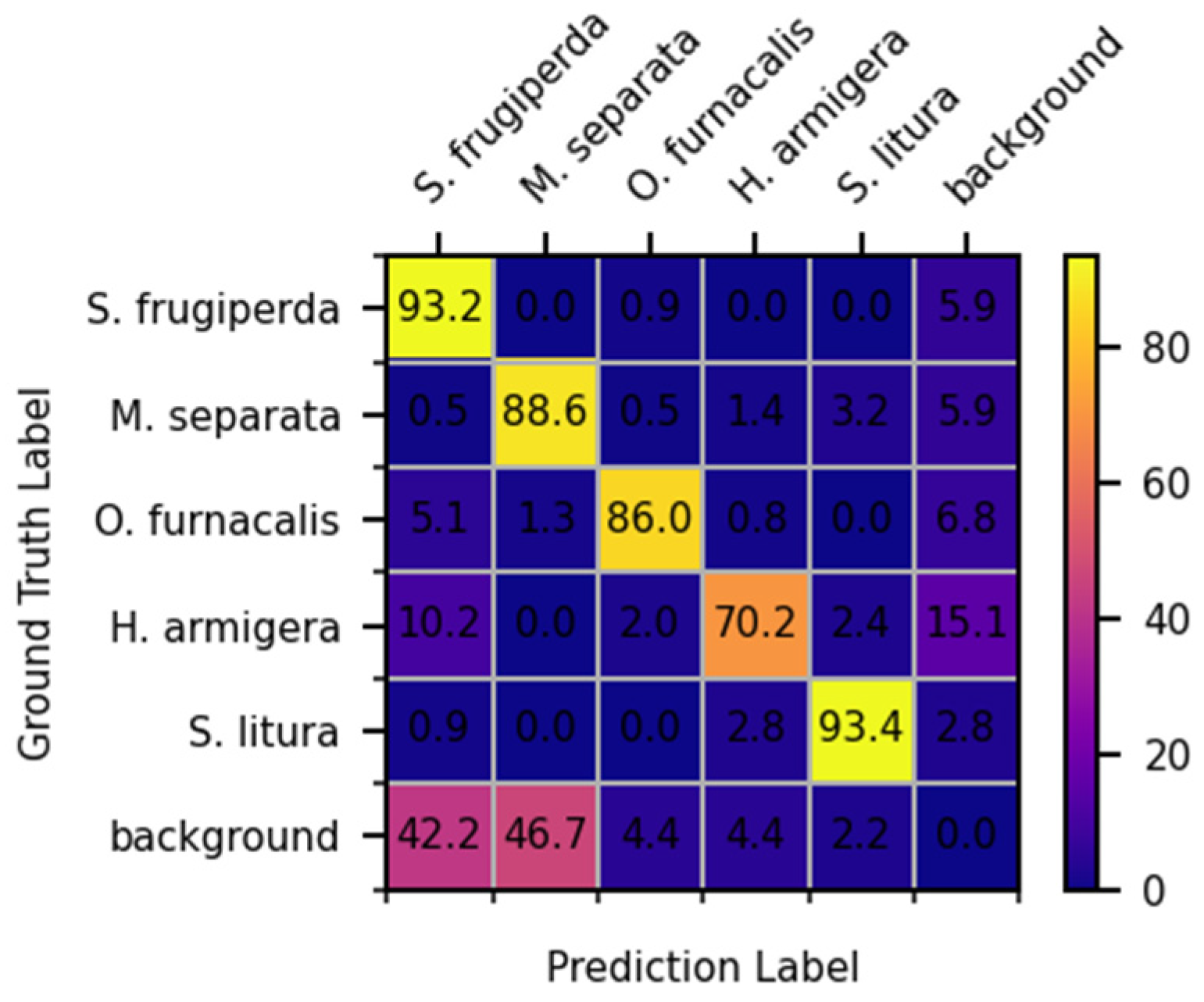
S. frugiperda can easily be confused with other lepidopteran insect pests, such as
Mythimna separate (Walker),
Ostrinia furnacalis (Guenee),
Helicoverpa armigera (Hübner), and
Spodoptera litura (Fabricius), as they are similar in size, color, morphology, and living environment, particularly in their larval stage [
4]. The similarity of these visual features poses a challenge for pest identification. Incorrect identification results lead to the use of unsuitable pesticides, which may not only jeopardize the growth of crops but also cause environmental pollution. Traditional pest identification tasks are completed by agricultural plant protection personnel through manual surveys, which are inefficient and susceptible to subjective factors. Fortunately, recent advancements in computer vision technology have provided new ideas and technical support for the automatic detection of some insect pests, which can effectively reduce the workload of professional plant protection personnel [
5].
Traditional computer vision algorithms mainly use image processing and pattern recognition techniques for the feature extraction and classification of pest images. A large number of studies [
6,
7,
8] have been conducted to extract color, shape, and texture features of pests and perform pest recognition tasks using support vector machines (SVMs) with certain results. In real-world outdoor scenarios, complex background environments are often present. Additionally, pest images are susceptible to various factors, such as differing light intensities, diverse weather conditions, and crop obstructions. Therefore, pest detection algorithms based on traditional computer vision face certain difficulties in adapting to complex field environments.
Compared with traditional machine learning techniques, deep learning techniques can fit the intrinsic characteristics of a large number of data well with a higher accuracy rate and strong robustness [
9]. The detection-based method calculates the location and species of multiple pests in an image, which can reduce the interference of a complex background when the size of pests is relatively small in the image. The field of object detection is mainly divided into single-stage detection algorithms, represented by the YOLO series [
10,
11,
12,
13,
14,
15], and two-stage detection algorithms, represented by Faster RCNN [
16]. Many advanced algorithms have been derived, such as Retinanet [
17], Cascade RCNN [
18], Double Head [
19], etc. To improve the detection ability of multi-scale objects, the feature pyramid network (FPN) [
20] was added into these detection frameworks as a common component. Compared with the fast single-stage algorithm, the two-stage algorithm has a slower speed but achieves higher accuracy.
Recently, many researchers have introduced deep learning technology into the field of agriculture. Many researchers [
21,
22,
23] have achieved high recognition results on cropped datasets by using classification methods for pest recognition. For the detection of dense small-sized pests in complex environments, Li and Teng et al. [
24,
25] designed a coarse-to-fine network and a pyramid network to enhance the detection effect. Many researchers [
26,
27] constructed databases by fixed pest collection devices and utilized detectors such as YOLOv5 for pest detection. In order to enhance the discrimination ability of detectors for multiple categories of pests, feature fusion [
28,
29] was considered for algorithmic improvement, and it was experimentally demonstrated that feature fusion is effective in improving detection accuracy. Classification-based methods [
21,
22,
23] focused on the global features of images. However, the proportion of pest areas in images collected in the field is usually small, which leads to more invalid information contained in global features. Some of the methods mentioned above are optimized mainly for pest detection algorithms in specific scenarios [
24,
25,
26,
27], which are not applicable to similar pest detection in complex field environments. Although the improved feature fusion methods [
28,
29] can improve detection results, they are optimized only from the perspective of feature fusion and still have some limitations.
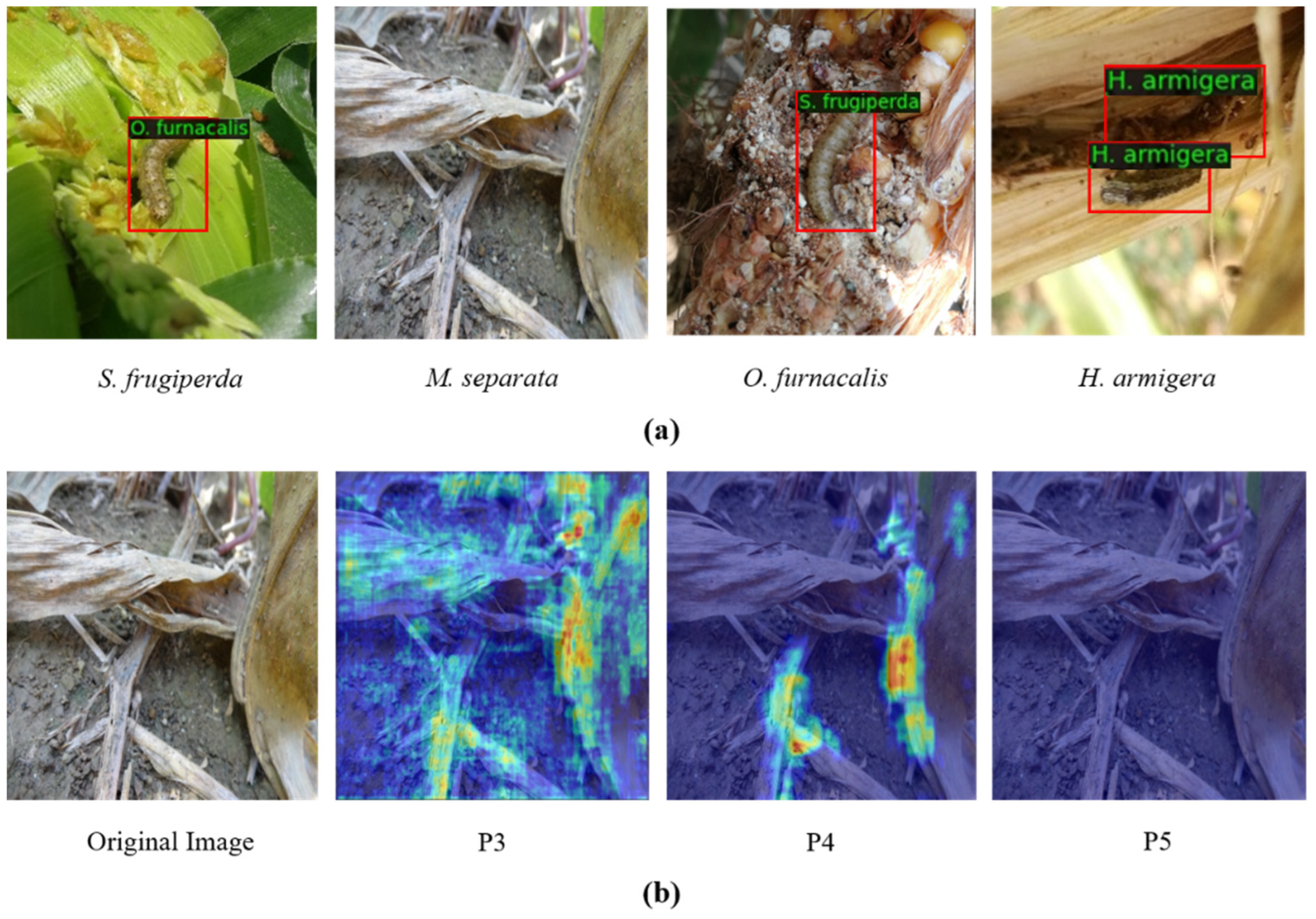
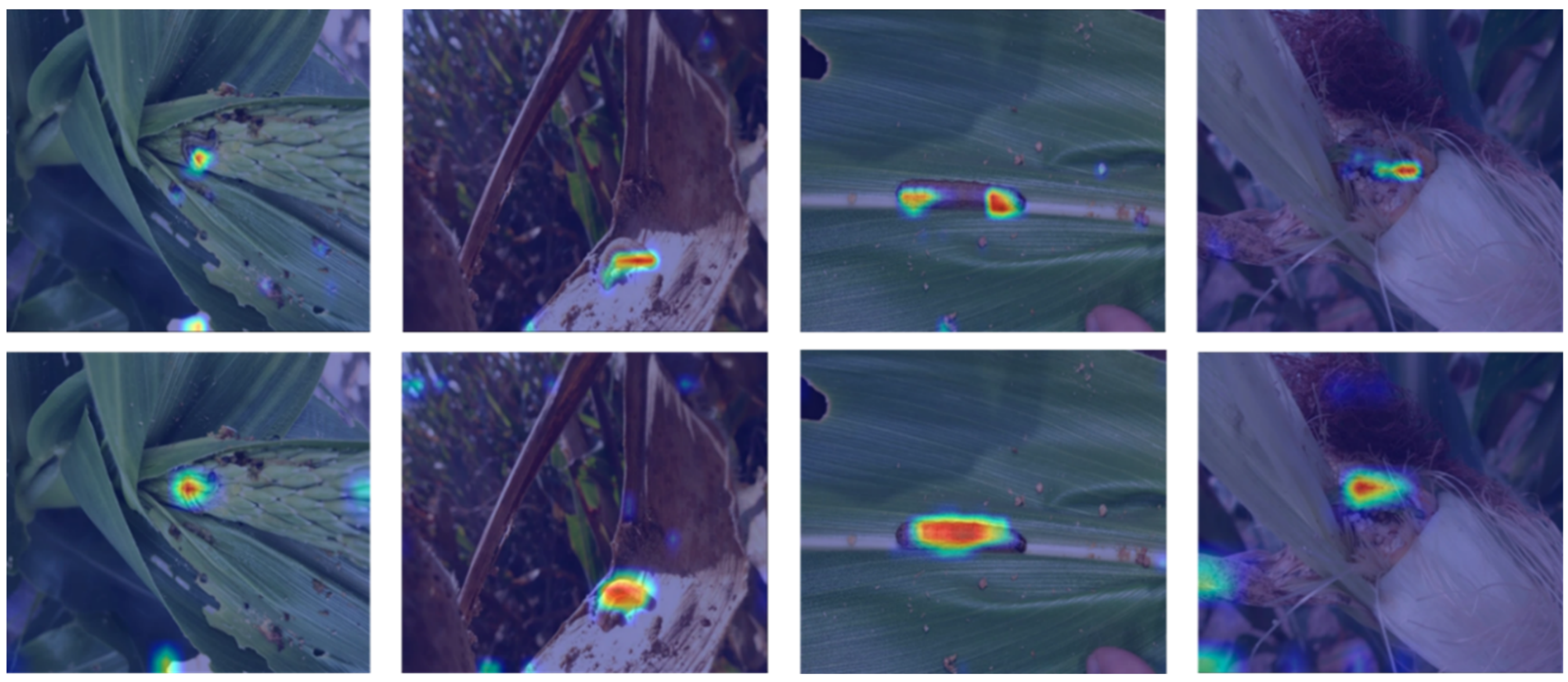
As shown in
Figure 1a, pest identification problems arise from inaccurate detection and recognition. The main factors that affect the accuracy of field pest identification are as follows: (1) the complex living environment of field pests and the similarity in appearance among different species of pests, which can lead to confusion in the extraction of pest features; (2) the responses of pest regions are different on multiple-scale feature maps, and incorrect feature mapping results in missed detection of pests, as shown in
Figure 1b; (3) the current two-stage pest detectors adopt the same RoI (region of interest) feature for the classification task and the localization task, which may make it difficult to train the task head network with optimal parameters; and (4) due to the difficulty of pest image acquisition in complex scenes, there is a lack of similar pest datasets for real farmland scenes.
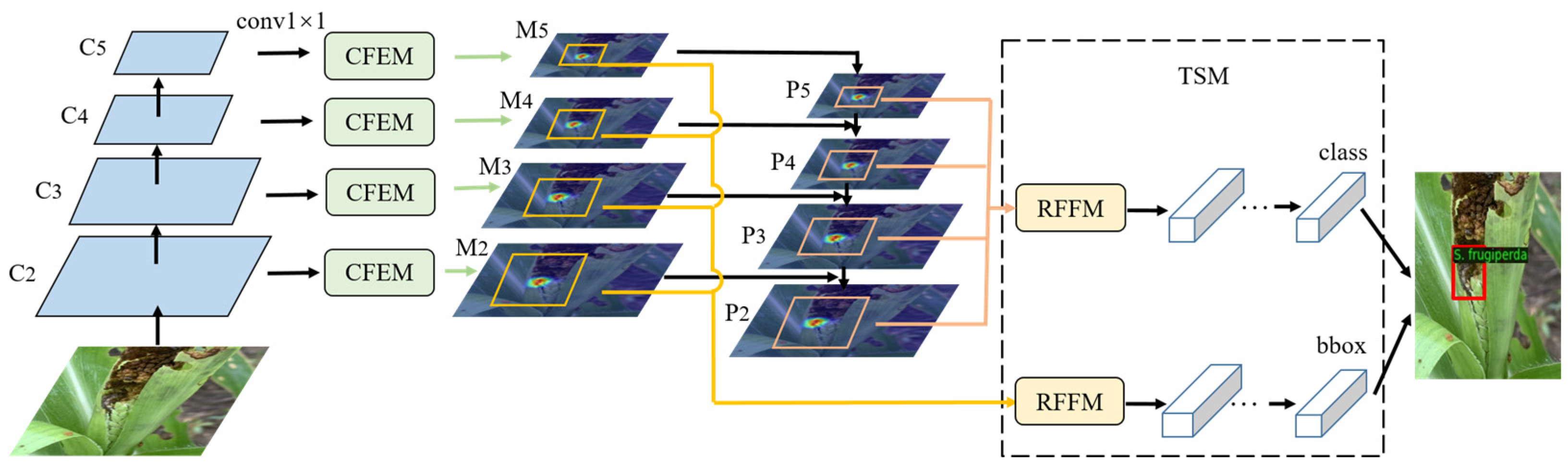
To address the aforementioned issues, some methods based on feature enhancement [
30], feature fusion [
31], and feature separation [
19] were proposed. Inspired by this, we optimized the two-stage algorithm in terms of contextual information, adaptive feature fusion, and separating features for diverse tasks to further improve the pest detection accuracy. Firstly, a context feature enhancement module was constructed to generate multi-scale features, which were used to enhance the features extracted by the backbone network. Secondly, the attention mechanism was used to adaptively weight the fusion of pest RoI features on the multi-scale feature map to obtain more accurate features of the pest regions. Finally, different features were constructed for separating the classification and localization tasks. The multi-scale features extracted by the context feature enhancement module were used for the localization task, and the context-enhanced features fused by the FPN were used for the classification task.
The main contributions of our work can be summarized as follows:
- (1)
A context feature enhancement module (CFEM) was proposed to obtain attention maps at each scale by atrous spatial pyramid pooling, which was beneficial for the detection of similar pests.
- (2)
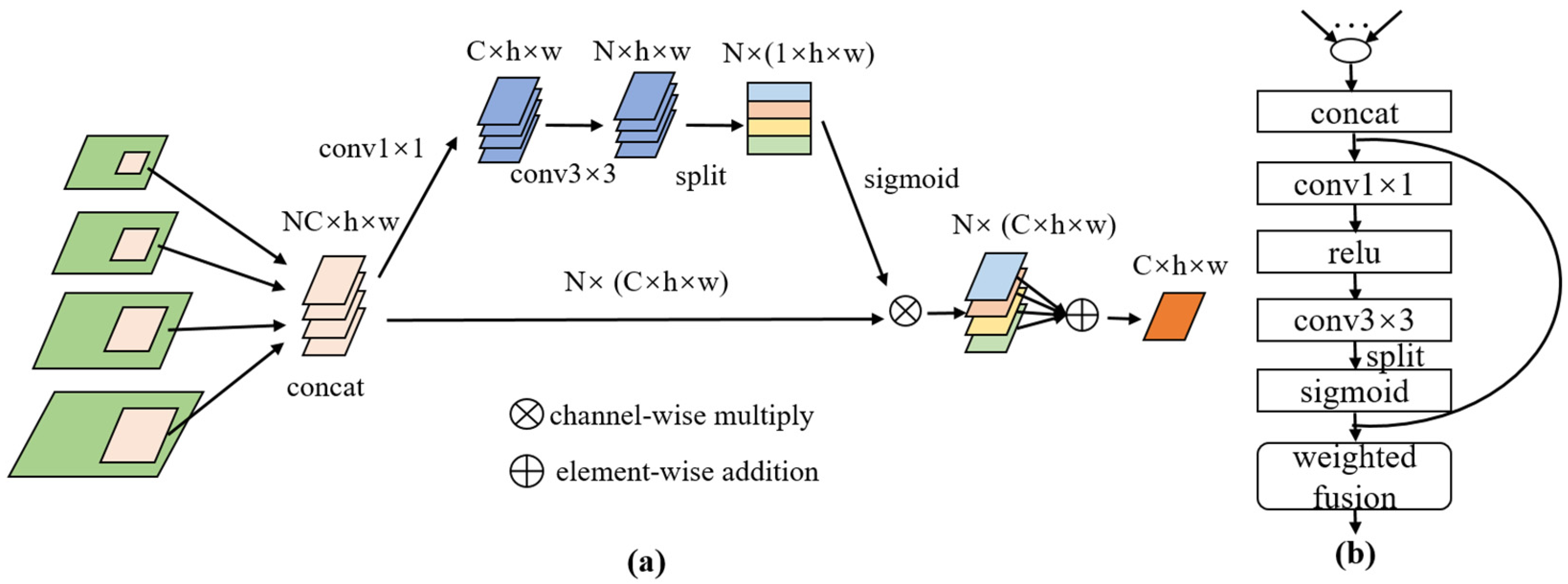
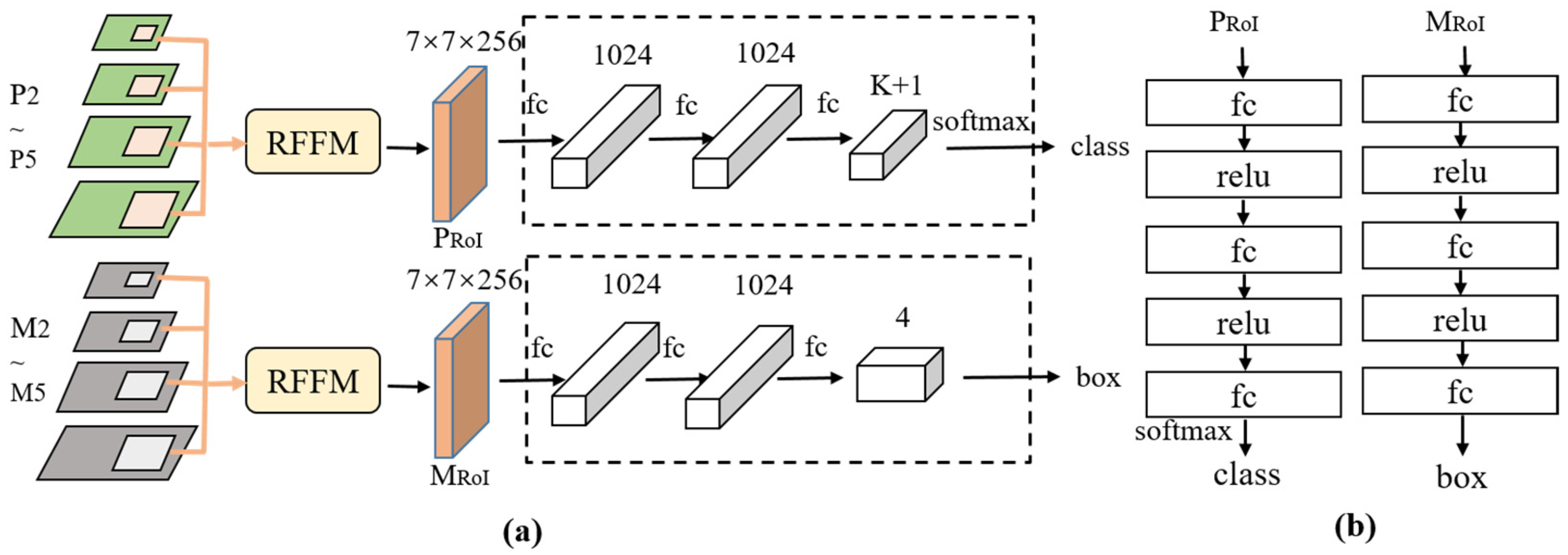
We proposed the RoI feature fusion module (RFFM) to adaptively weight and fuse pest features on multiple network layers, which was more conducive to the classification and localization of pests at different scales.
- (3)
The proposed task separation module (TSM) decoupled the features of pest classification and localization networks, improving the overall performance of the detector.
- (4)
A larval dataset, SimilarPest5, containing five similar pest species was established to demonstrate the effectiveness of the developed method.
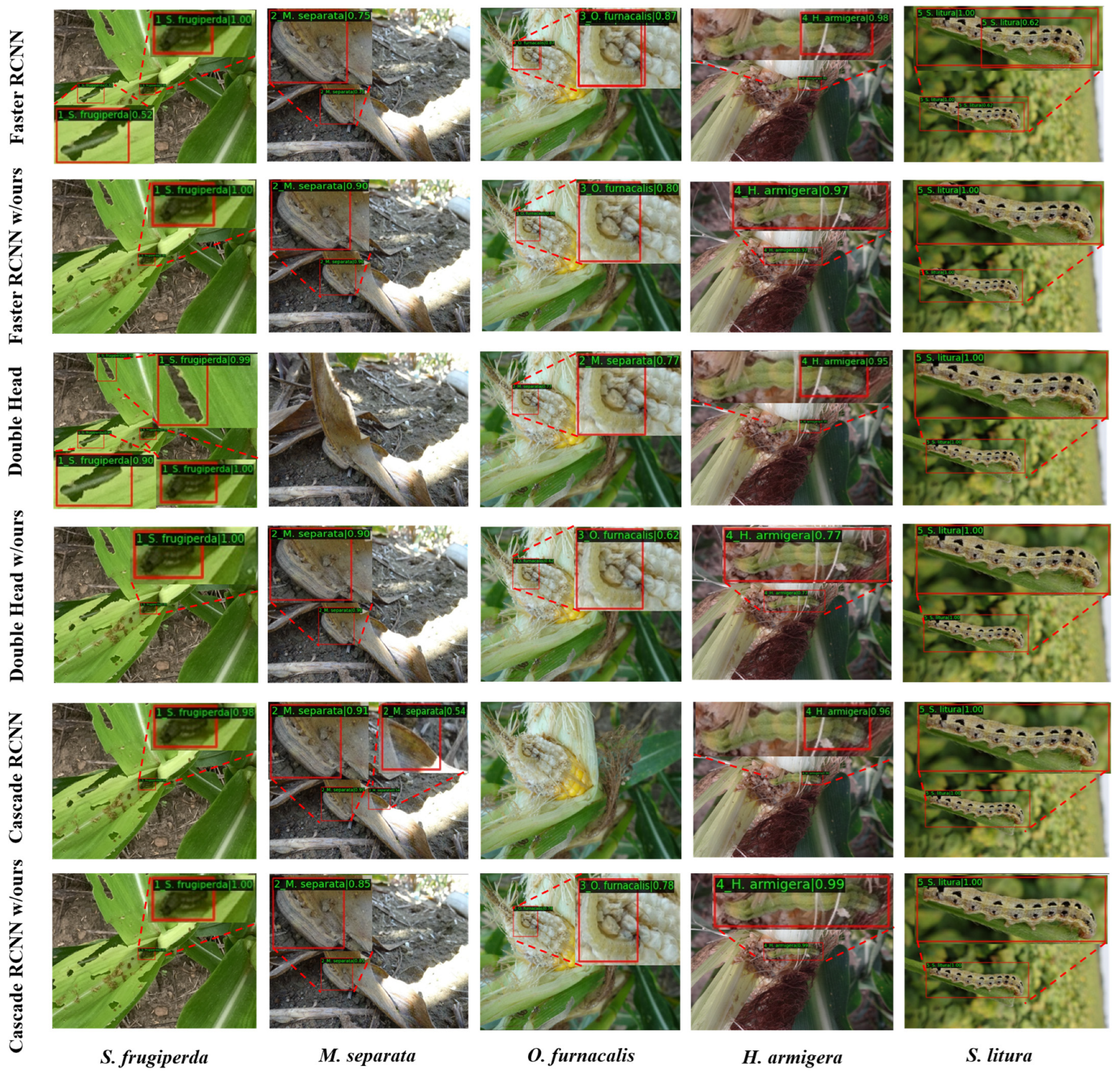
4. Conclusions
In agricultural production, many lepidopteran pests with similar appearances, represented by S. frugiperda, cause serious damage to crop growth. Therefore, we constructed a SimilarPest5 dataset with images of five similar pests in corn and soybean fields. However, since these images were obtained in actual corn and soybean field environments, they frequently exhibit challenges like complex backgrounds, uneven lighting, and occasional obstruction. These factors make it challenging for a generic model to describe the features of the pests accurately. To improve the accuracy of pest detection in real-field scenarios, we optimized the detection network from different perspectives. The effectiveness of the proposed modules was validated through ablation and comparison experiments, and state-of-the-art performance was achieved on the SimilarPest5 dataset.
The method proposed in this paper can provide intelligent recognition functions for terminal devices and reduce the burden on professionals (
Figure S4). In real-world IPM scenarios, higher pest detection accuracy can provide effective decision support for pest control, while providing early warning information to agricultural personnel and helping to develop more effective IPM strategies. However, our proposed method still has some limitations. In future work, we hope to collect and construct larger datasets of field pests from different crops and extend the proposed method to other types of pest detection, such as rice pests like
Nilaparvata lugens Stal,
Sogatella furcifera, and
ladelphax striatellus falln, to explore the effectiveness of the method in pest detection for other crops. Furthermore, we would like to further analyze the similarity of pests based on their morphological, ecological, and statistical characteristics and verify the detection accuracy of the proposed algorithm for pests with different similarity levels. Since the algorithm introduces additional modules, it leads to greater computational complexity and requires support from hardware devices with higher computational performance. Therefore, in future work, we will try to build lighter model architectures while maintaining detection performance.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





