Optimization of Process Parameters to Improve the Effective Area of Deposition in GMAW-Based Additive Manufacturing and its Mechanical and Microstructural Analysis


Abstract
:1. Introduction
2. Method and Experiment
3. Results and Discussion
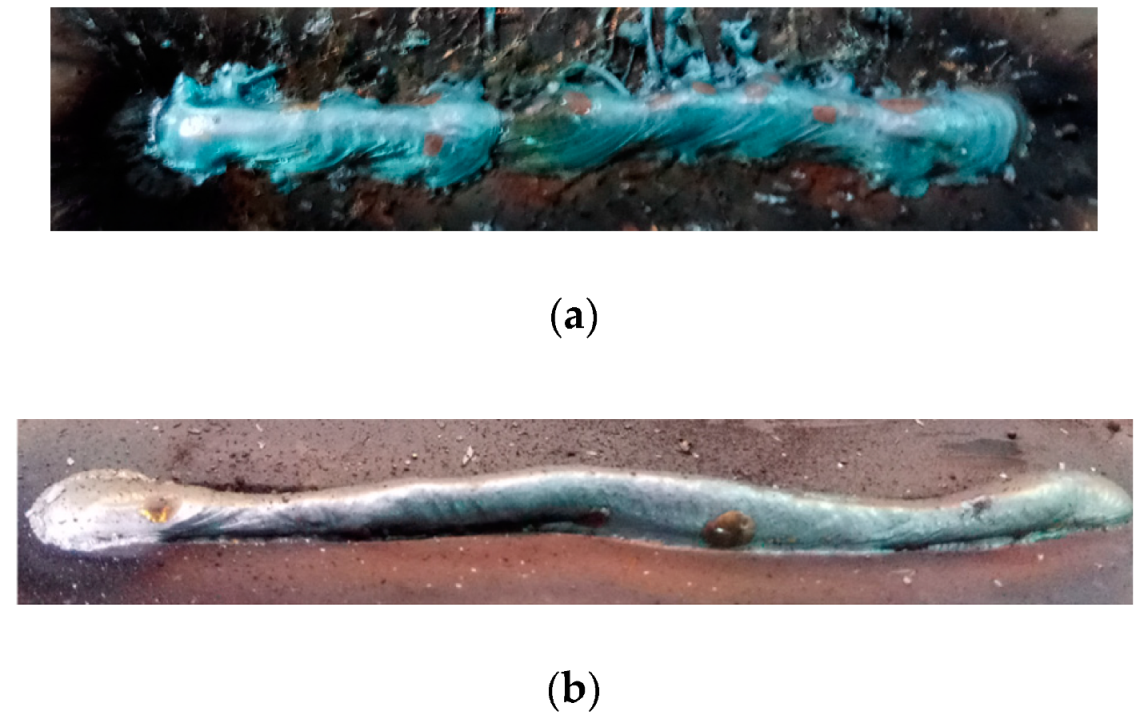
3.1. Single-Layer, Single-Pass
3.2. Multilayer, Single-pass
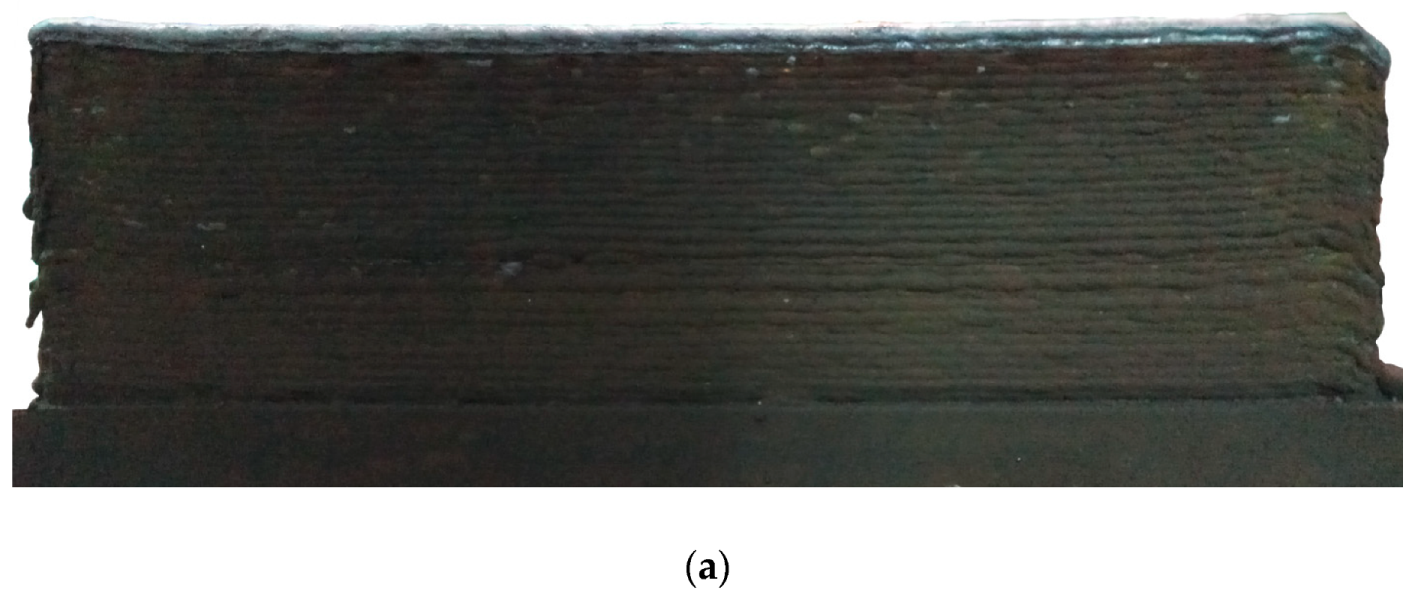
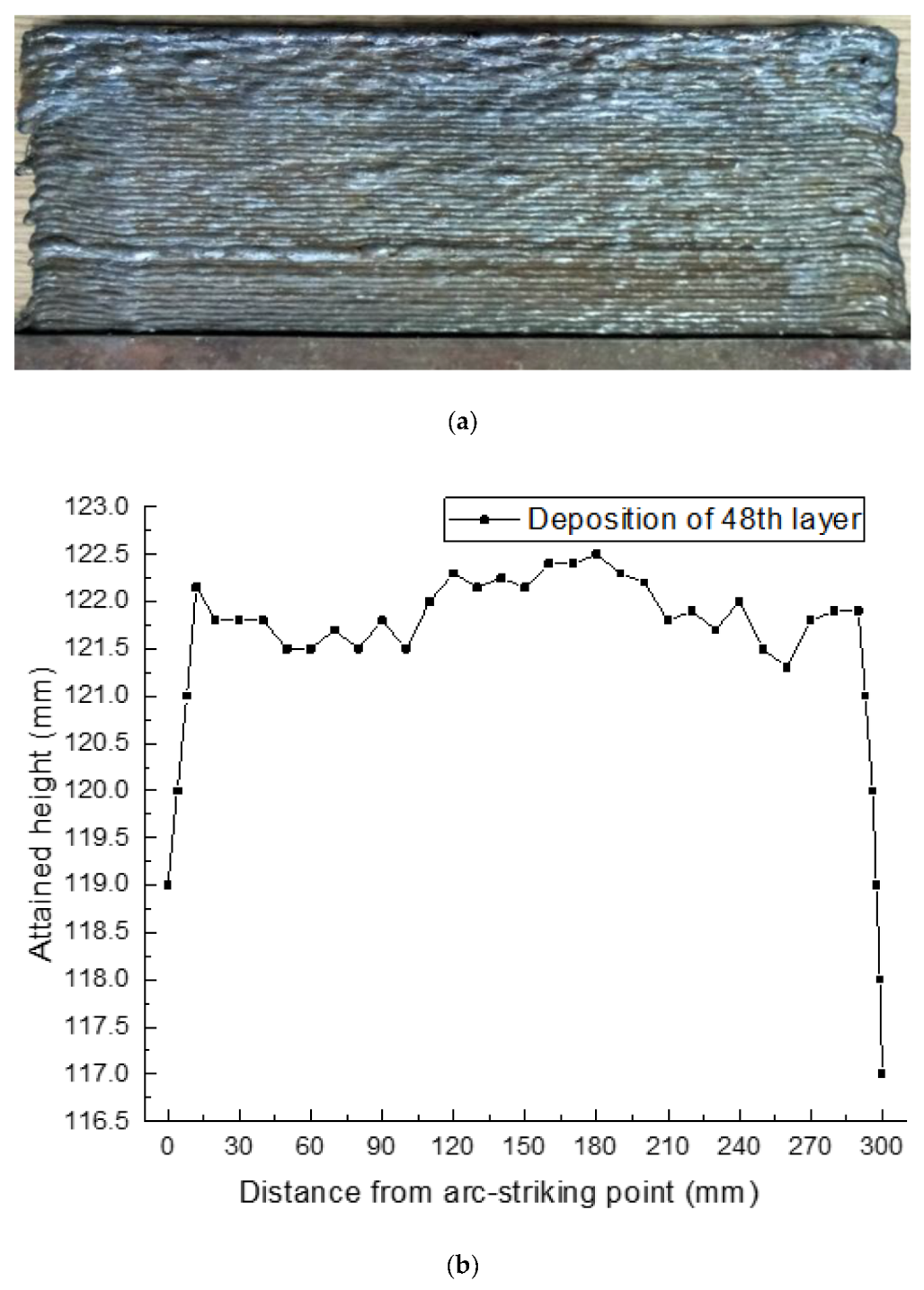
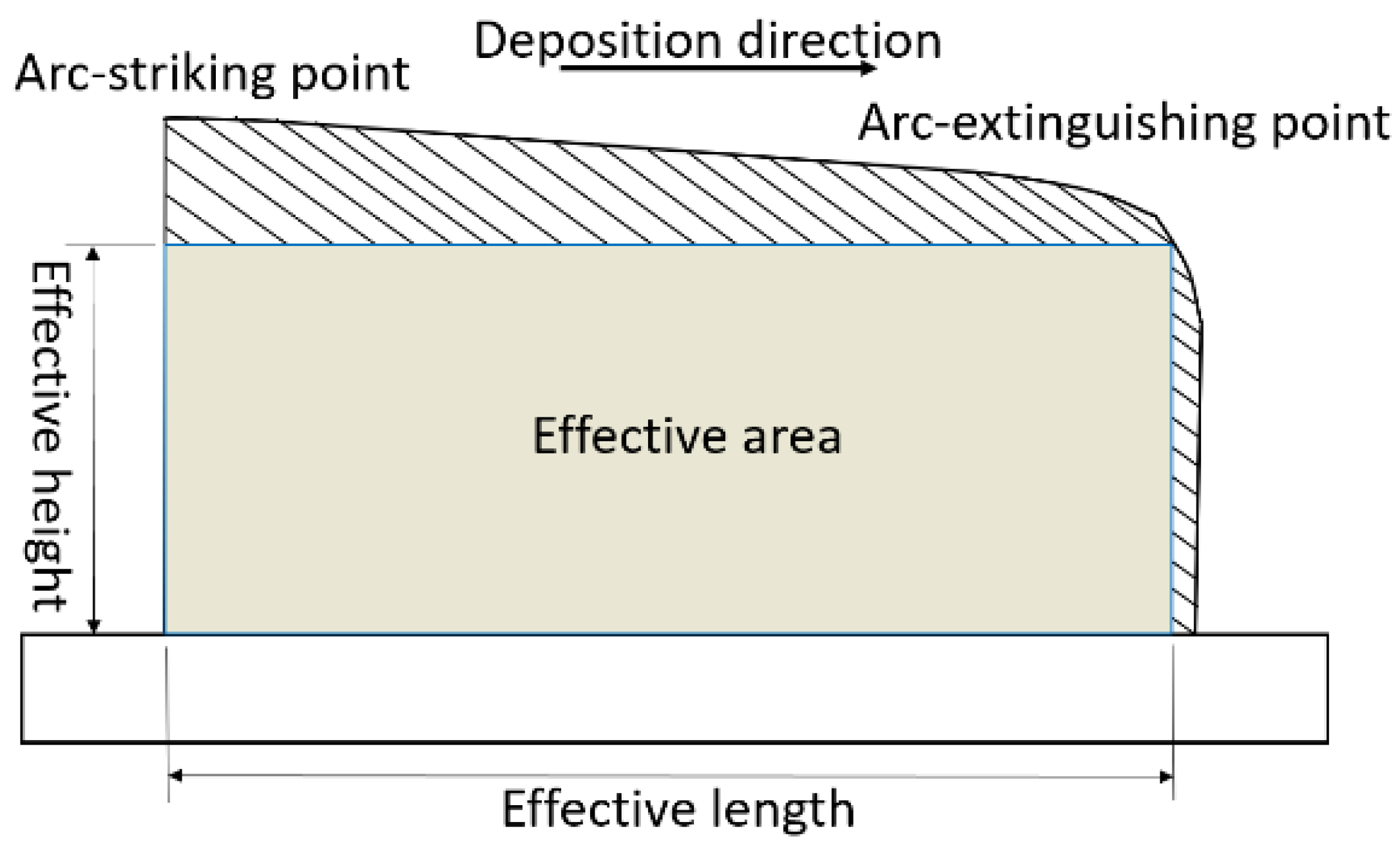
3.3. Forming Appearance and Effective Area
3.4. Material and Mechanical Properties
3.4.1. Metallography
3.4.2. Microhardness
3.4.3. Tensile Strength
4. Conclusions
- An optimum profile of welding linear energy was presented to calculate the values of the deposition parameters so that (a) a uniform height could be obtained in the arc-striking and arc-extinguishing areas, and (b) many layers could be stacked as required without termination of the process. This showed that the process was suitable for additive manufacturing.
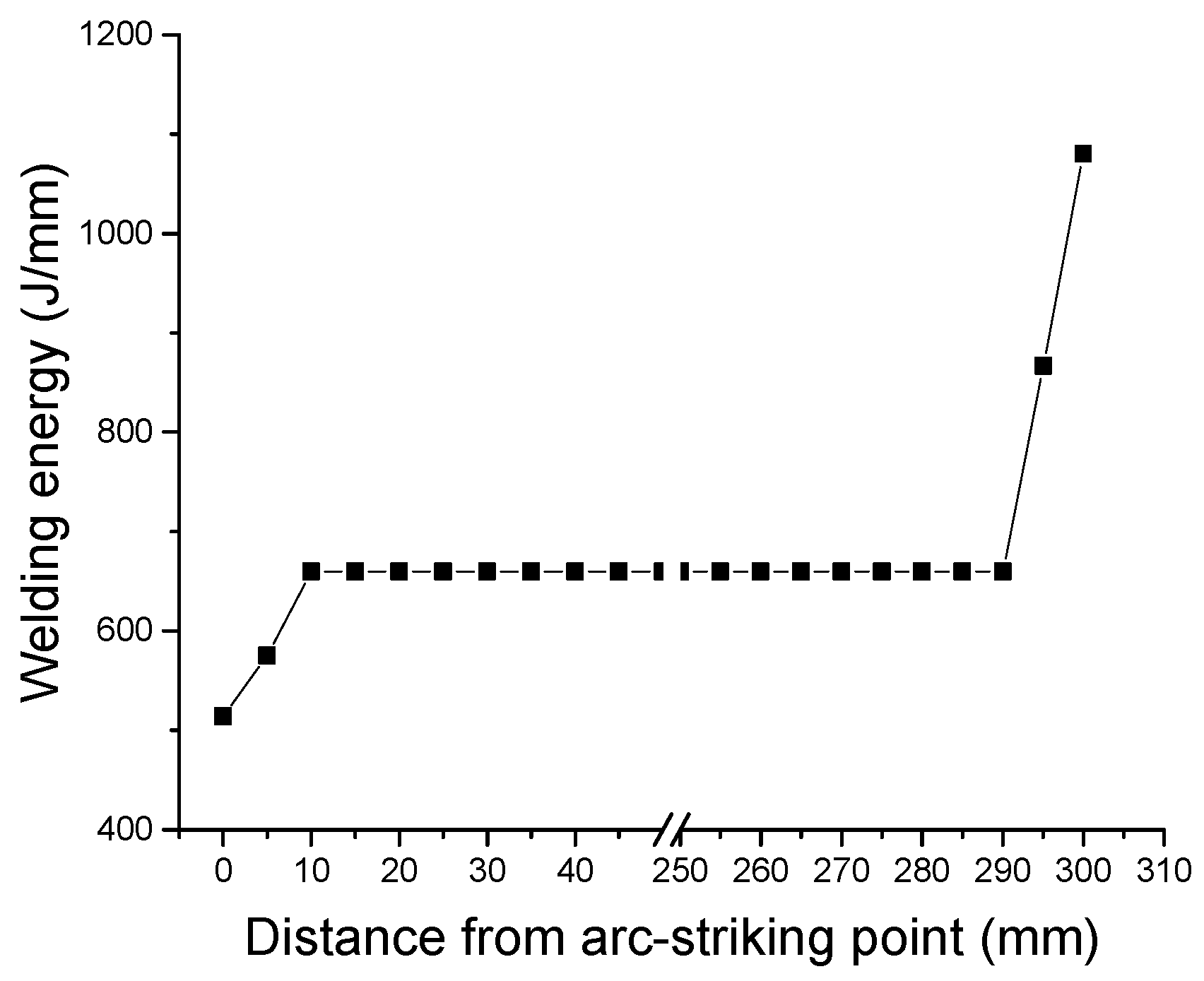
- A stable pool was attained with current intensities smaller than 170 A with short-circuit modes of molten metal transfer. Different combinations of parameters can be chosen according to the welding linear energy profile. Welding linear energy had a lower value in the arc-striking region than that at the steady stage, while in the arc-extinguishing region its value increased even though the current was reduced.
- The change in the height per layer was controlled based on the adjustment of the current in the first few layers until equilibrium was attained, leading to the production of a uniform height and a smooth bead. The change in current in subsequent layers was compensated by a change in travel speed.
- The travel speed was one of the most important and influential factors of the resulting height in extreme positions of the weld bead followed by voltage and current.
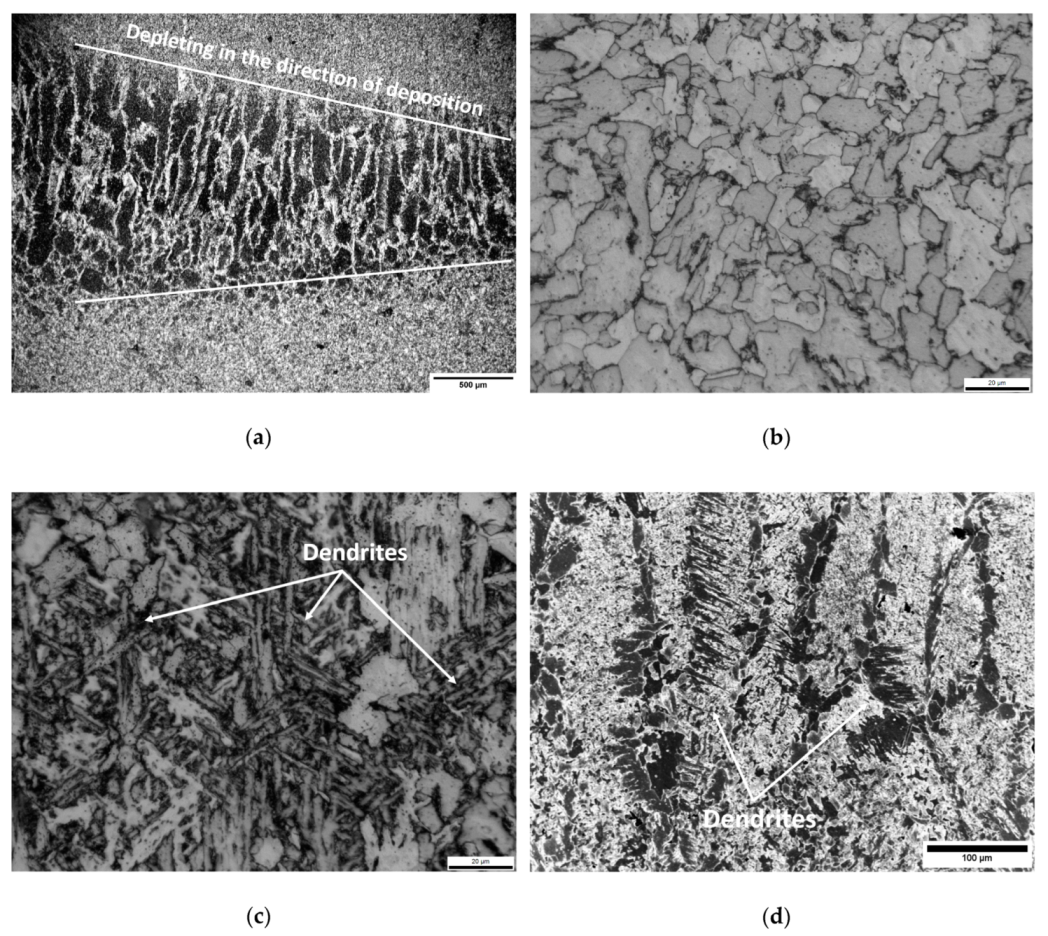
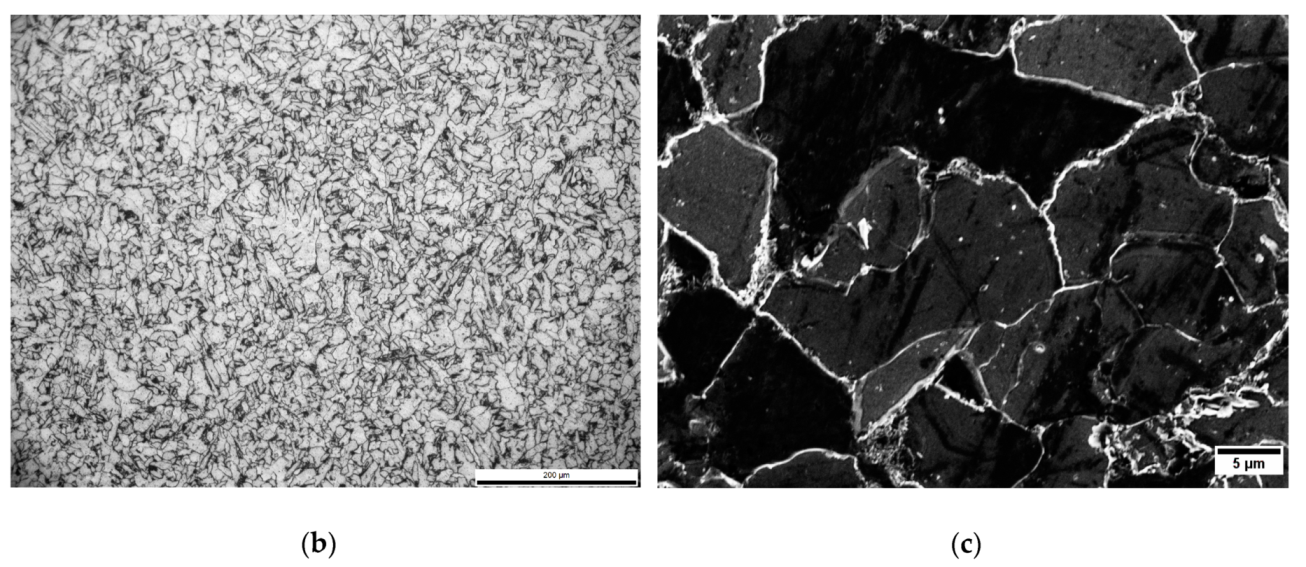
- The dendritic microstructure was observed in the initial layers in arc-striking and arc-extinguishing areas which depletes to be equiaxed in most of the steady stage area. After the equilibrium conditions were achieved, most of the microstructure in all three regions was equiaxed with some inclusion precipitations observed in arc-extinguishing parts.
- Microhardness and tensile results show better properties than the rolled steel available in industry with similar carbon content. The fracture for tensile specimens was of a ductile fracture type with an obvious dimpled structure.
Author Contributions
Funding
Conflicts of Interest
References
- Baufeld, B.; Van Der Biest, O.; Gault, R. Additive manufacturing of Ti–6Al–4V components by shaped metal deposition: Microstructure and mechanical properties. Mater. Des. 2010, 31, S106–S111. [Google Scholar] [CrossRef]
- Hoefer, K.; Haelsig, A.; Mayr, P. Arc-based additive manufacturing of steel components—Comparison of wire-and powder-based variants. Weld. World 2018, 62, 243–247. [Google Scholar] [CrossRef]
- Busachi, A.; Erkoyuncu, J.; Colegrove, P.; Martina, F.; Watts, C.; Drake, R. A review of Additive Manufacturing technology and Cost Estimation techniques for the defence sector. CIRP J. Manuf. Sci. Technol. 2017, 19, 117–128. [Google Scholar] [CrossRef] [Green Version]
- Yin, Z.Q.; Zhang, G.J.; Zhao, H.H.; Wu, L. Rapid Manufacturing and Remanufacturing System Based on Robotic GMAW. Adv. Mater. Res. 2010, 156, 1626–1629. [Google Scholar] [CrossRef]
- Thompson, S.M.; Bian, L.; Shamsaei, N.; Yadollahi, A. An overview of Direct Laser Deposition for additive manufacturing; Part I: Transport phenomena, modeling and diagnostics. Addit. Manuf. 2015, 8, 36–62. [Google Scholar] [CrossRef]
- Frazier, W.E. Metal Additive Manufacturing: A Review. J. Mater. Eng. Perform. 2014, 23, 1917–1928. [Google Scholar] [CrossRef]
- Ding, J.; Colegrove, P.; Mehnen, J.; Ganguly, S.; Almeida, P.S.; Wang, F.; Williams, S. Thermo-mechanical analysis of Wire and Arc Additive Layer Manufacturing process on large multi-layer parts. Comput. Mater. Sci. 2011, 50, 3315–3322. [Google Scholar] [CrossRef] [Green Version]
- Mughal, M.P.; Fawad, H.; Mufti, R.A. Three-Dimensional Finite-Element Modelling of Deformation in Weld-Based Rapid Prototyping. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2006, 220, 875–885. [Google Scholar] [CrossRef]
- Dickens, P.M.; Wykes, C.M.; Spencer, J.D. Rapid prototyping of metal parts by three-dimensional welding. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 1998, 212, 175–182. [Google Scholar]
- Zhang, Y.; Chen, Y.; Li, P.; Male, A.T. Weld deposition-based rapid prototyping: A preliminary study. J. Mater. Process. Technol. 2003, 135, 347–357. [Google Scholar] [CrossRef]
- Hu, Z.; Qin, X.; Shao, T.; Liu, H. Understanding and overcoming of abnormity at start and end of the weld bead in additive manufacturing with GMAW. Int. J. Adv. Manuf. Technol. 2017, 95, 2357–2368. [Google Scholar] [CrossRef]
- Geng, H.; Li, J.; Xiong, J.; Lin, X.; Zhang, F. Optimization of wire feed for GTAW based additive manufacturing. J. Mater. Process. Technol. 2017, 243, 40–47. [Google Scholar] [CrossRef]
- Ríos, S.; Colegrove, P.; Martina, F.; Williams, S. Analytical Process Model for Wire + Arc Additive Manufacture. Addit. Manuf. 2018, 21, 651–657. [Google Scholar] [CrossRef]
- Xiong, J.; Zhang, G. Adaptive control of deposited height in GMAW-based layer additive manufacturing. J. Mater. Process. Technol. 2014, 214, 962–968. [Google Scholar] [CrossRef]
- Xiong, J.; Yin, Z.; Zhang, W. Forming appearance control of arc striking and extinguishing area in multi-layer single-pass GMAW-based additive manufacturing. Int. J. Adv. Manuf. Technol. 2016, 87, 579–586. [Google Scholar] [CrossRef]
- Venturini, G.; Montevecchi, F.; Bandini, F.; Scippa, A.; Campatelli, G. Feature based three axes computer aided manufacturing software for wire arc additive manufacturing dedicated to thin walled components. Addit. Manuf. 2018, 22, 643–657. [Google Scholar] [CrossRef]
- Xiong, J.; Zhang, G.; Zhang, W. Forming appearance analysis in multi-layer single-pass GMAW-based additive manufacturing. Int. J. Adv. Manuf. Technol. 2015, 80, 1767–1776. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, G.; Yin, Z.; Wu, L. A 3D dynamic analysis of thermal behavior during single-pass multi-layer weld-based rapid prototyping. J. Mater. Process. Technol. 2011, 211, 488–495. [Google Scholar] [CrossRef]
- Fachinotti, V.D.; Cardona, A.; Baufeld, B.; Van Der Biest, O. Finite-element modelling of heat transfer in shaped metal deposition and experimental validation. Acta Mater. 2012, 60, 6621–6630. [Google Scholar] [CrossRef]
- Available online: http://www.kobelco.co.jp/english/welding/handbook/index.html (accessed on 30 April 2017).
- Zhang, X.; Cen, X.; Ravichandran, R.; Hughes, L.A.; Van Benthem, K. Simultaneous Scanning Electron Microscope Imaging of Topographical and Chemical Contrast Using In-Lens, In-Column, and Everhart–Thornley Detector Systems. Microsc. Microanal. 2016, 22, 565–575. [Google Scholar] [CrossRef]
- ASTM, E. 384-08a, Standard Test Method for Microindentation Hardness of Materials; ASTM International: West Conshohocken, PA, USA, 2008. [Google Scholar]
- ASTM, E. Standard test methods for tension testing of metallic materials. In Annual Book of ASTM Standards; ASTM: West Conshohocken, PA, USA, 2001. [Google Scholar]
- Prado-Cerqueira, J.; Diéguez, J.; Camacho, A. Preliminary development of a Wire and Arc Additive Manufacturing system (WAAM). Procedia Manuf. 2017, 13, 895–902. [Google Scholar] [CrossRef]
- Montevecchi, F.; Venturini, G.; Grossi, N.; Scippa, A.; Campatelli, G. Idle time selection for wire-arc additive manufacturing: A finite element-based technique. Addit. Manuf. 2018, 21, 479–486. [Google Scholar] [CrossRef]
- Yang, D.; He, C.; Zhang, G. Forming characteristics of thin-wall steel parts by double electrode GMAW based additive manufacturing. J. Mater. Process. Technol. 2016, 227, 153–160. [Google Scholar] [CrossRef]
- Thamilarasi, P.; Ragunathan, S.; Mohankumar, E. Development of empirical models for prediction of weld bead geometry in robotic-GMAW. J. Achiev. Mater. Manuf. Eng. 2014, 67, 72–85. [Google Scholar]
- ASTM, E. Standard Test Methods for Determining Average Grain Size; ASTM International: West Conshohocken, PA, USA, 2004. [Google Scholar]
- Brito, C.; Reinhart, G.; Nguyen-Thi, H.; Mangelinck-Noël, N.; Cheung, N.; Spinelli, J.E.; Garcia, A. High cooling rate cells, dendrites, microstructural spacings and microhardness in a directionally solidified Al–Mg–Si alloy. J. Alloy. Compd. 2015, 636, 145–149. [Google Scholar] [CrossRef]
- Committee, A.I.H. ASM Handbook: Materials Selection and Design; CRC Press: Boca Raton, FL, USA, 1997. [Google Scholar]
- Bramfitt, B.L. Structure/Property Relationships in Irons and Steels; ASM International: Materials Park, OH, USA, 1998; pp. 153–173. [Google Scholar]
- Grosdidier, T.; Zou, J.; Stein, N.; Boulanger, C.; Hao, S.; Dong, C. Texture modification, grain refinement and improved hardness/corrosion balance of a FeAl alloy by pulsed electron beam surface treatment in the “heating mode”. Scr. Mater. 2008, 58, 1058–1061. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, Z. Microhardness Prediction Based on a Microstructure-Sensitive Flow Stress Model During High Speed Machining Ti-6Al-4V. J. Manuf. Sci. Eng. 2018, 140, 091003. [Google Scholar] [CrossRef]
- Gao, M.; Zeng, X.; Yan, J.; Hu, Q. Microstructure characteristics of laser–MIG hybrid welded mild steel. Appl. Surf. Sci. 2008, 254, 5715–5721. [Google Scholar] [CrossRef]
- Abushosha, R.; Ayyad, S.; Mintz, B. Influence of cooling rate on hot ductility of C-Mn-AI and C-Mn-Nb-AL steels. Mater. Sci. Technol. 1998, 14, 346–351. [Google Scholar] [CrossRef]
- Chen, X.; Li, J.; Cheng, X.; He, B.; Wang, H.; Huang, Z. Microstructure and mechanical properties of the austenitic stainless steel 316L fabricated by gas metal arc additive manufacturing. Mater. Sci. Eng. A 2017, 703, 567–577. [Google Scholar] [CrossRef]
- Mazilkin, A.A.; Straumal, B.B.; Protasova, S.G.; Dobatkin, S.V.; Baretzky, B. Structure, phase composition, and microhardness of carbon steels after high-pressure torsion. J. Mater. Sci. 2008, 43, 3800–3805. [Google Scholar] [CrossRef] [Green Version]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elements | C | Mn | Si | S | P | Ni | Cr | Mo | V | Cu | Fe |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Standard | 0.06 to 0.15 | 1.4 to 1.85 | 0.8 to 1.15 | 0.035 (max) | 0.025 (max) | 0.15 (max) | 0.15 (max) | 0.15 (max) | 0.03 (max) | 0.5 (max) | Bal. |
| Typical | 0.1 | 1.56 | 0.88 | 0.012 | 0.011 | 0.01 | 0.02 | <0.01 | <0.01 | 0.24 | Bal. |
| Parameters | Current (I) | Voltage (U) | Welding Energy (EW) | Travel Speed (ST) |
|---|---|---|---|---|
| Units | (A) | (V) | (J/mm) | (mm/s) |
| Layer 1 | ||||
| Arc-striking | 170 | 24 | 515 | 8.0 |
| 170 | 24 | 575 | 7.1 | |
| Steady stage | 170 | 24 | 660 | 6.2 |
| Arc-extinguishing | 150 | 22 | 865 | 3.8 |
| 130 | 20 | 1080 | 2.4 | |
| Layer 2 | ||||
| Arc-striking | 160 | 23 | 515 | 7.2 |
| 160 | 23 | 575 | 6.5 | |
| Steady stage | 160 | 23 | 660 | 5.6 |
| Arc-extinguishing | 140 | 21 | 865 | 3.4 |
| 120 | 19 | 1080 | 2.1 | |
| Layer 3 | ||||
| Arc-striking | 150 | 22 | 515 | 6.5 |
| 150 | 22 | 575 | 5.8 | |
| Steady stage | 150 | 22 | 660 | 5.0 |
| Arc-extinguishing | 130 | 20 | 865 | 3.0 |
| 100 | 18 | 1080 | 1.7 | |
| Layer 4 | ||||
| Arc-striking | 140 | 21 | 515 | 5.8 |
| 140 | 21 | 575 | 5.2 | |
| Steady stage | 140 | 21 | 660 | 4.5 |
| Arc-extinguishing | 120 | 19 | 865 | 2.6 |
| 90 | 17 | 1080 | 1.4 | |
| Layer 5 | ||||
| Arc-striking | 130 | 20 | 515 | 5.1 |
| 130 | 20 | 575 | 4.5 | |
| Steady stage | 130 | 20 | 660 | 3.9 |
| Arc-extinguishing | 110 | 18 | 865 | 2.3 |
| 80 | 16 | 1080 | 1.2 | |
| Layer 6 | ||||
| Arc-striking | 120 | 19 | 515 | 4.5 |
| 120 | 19 | 575 | 4.0 | |
| Steady stage | 120 | 19 | 660 | 3.5 |
| Arc-extinguishing | 100 | 17 | 865 | 2.0 |
| 70 | 15 | 1080 | 1.0 |
| Total area (mm2) | 36,558.2 |
| Effective area (mm2) | 35,402.5 |
| Total volume (mm3) | 299,777.2 |
| Effective volume (mm3) | 276,139.5 |
| Deposition efficiency (%) | 92.1 |
| Sample number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Microhardness (HV) | 222 | 162 | 164 | 180 | 170 | 168 | 169 | 238 | 189 | 177 |
| Sample Number | Yield Strength (MPa) | Ultimate Strength (MPa) | Percentage Area Reduction (%) | Percentage Elongation (%) |
|---|---|---|---|---|
| T1 | 316 | 432 | 40 | 14 |
| T2 | 169 | 549 | 63 | 30 |
| T3 | 324 | 442 | 44 | 16 |
| T4 | 376 | 577 | 59 | 28 |
| T5 | 341 | 579 | 62 | 29 |
| T6 | 328 | 583 | 73 | 34 |
| T7 | 321 | 523 | 74 | 33 |
| T8 | 329 | 484 | 43 | 16 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Waqas, A.; Qin, X.; Xiong, J.; Wang, H.; Zheng, C. Optimization of Process Parameters to Improve the Effective Area of Deposition in GMAW-Based Additive Manufacturing and its Mechanical and Microstructural Analysis. Metals 2019, 9, 775. https://doi.org/10.3390/met9070775
Waqas A, Qin X, Xiong J, Wang H, Zheng C. Optimization of Process Parameters to Improve the Effective Area of Deposition in GMAW-Based Additive Manufacturing and its Mechanical and Microstructural Analysis. Metals. 2019; 9(7):775. https://doi.org/10.3390/met9070775
Chicago/Turabian StyleWaqas, Ali, Xiansheng Qin, Jiangtao Xiong, Hongbo Wang, and Chen Zheng. 2019. "Optimization of Process Parameters to Improve the Effective Area of Deposition in GMAW-Based Additive Manufacturing and its Mechanical and Microstructural Analysis" Metals 9, no. 7: 775. https://doi.org/10.3390/met9070775