
Robust Adaptive Control of Knee Exoskeleton-Assistant System Based on Nonlinear Disturbance Observer

 ,
,  and
and
Abstract
:1. Introduction
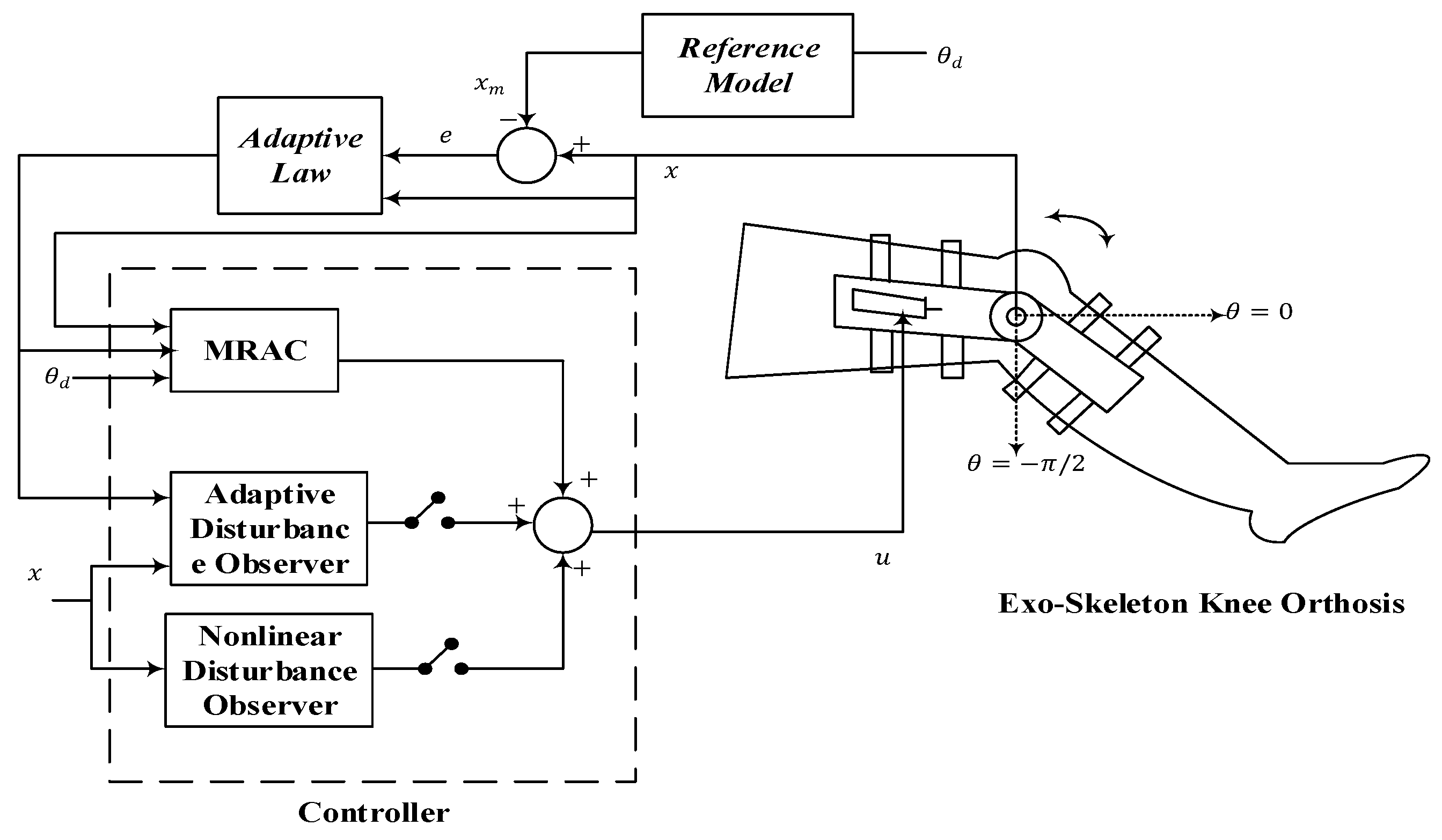
- Design of model reference controller to robustly control the rehabilitation knee-assistant device subjected to upper bounded and unknown disturbance.
- Design of MRAC together with adaptive disturbance estimator subjected to upper bounded and unknown disturbance.
- Combining the design of nonlinear disturbance observer with MRAC controller design to robustly control the rehabilitation knee-assistant device in the presence of upper bounded and unknown disturbance.
- Conducting performance comparison among the three proposed controllers in terms of robustness, transient and control input characteristics.
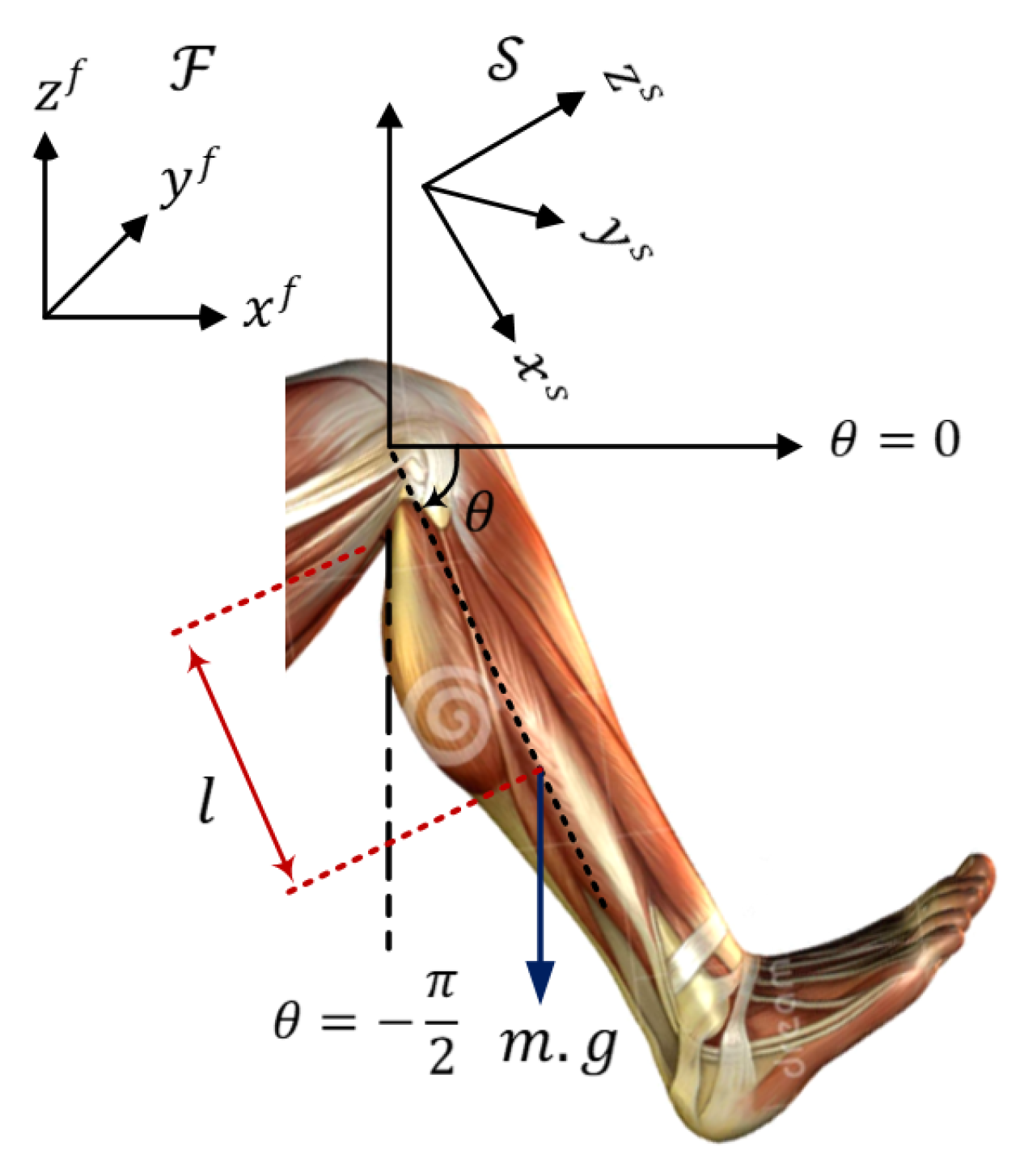
2. Mathematical Modelling
3. Controller Design
3.1. Model Reference Adaptive Control (MRAC)
- : is a matrix assumed to have totally unknown with bounded constant elements,
- : is the known matrix,
- : is diagonal matrix of unknown entries,
- : is a matrix of unknown constants,
- : is a matrix of known functions,
- : is the vector of outputs,
- : is an output matrix of known weights,
- : is a vector of unknown upper-bounded disturbances.
- : is the state matric of reference model,
- : is the input matrix of reference model,
- : is the vector of state variables of reference model,
- : is the commanded input.
- □
- To eliminate the nonlinearity described by
- □
- To deternine the forward and feedback gains, which are necessary in the control design to satifiy its objective,
- □
- To address the uncertainties due to , and
- is the estimation matrix of unknown matrix ,
- : is the feedback gain matrix.
3.2. MRAC with Adaptive Disturbance Estimator
3.3. MRAC Based on Nonlinear Disturbance Observer
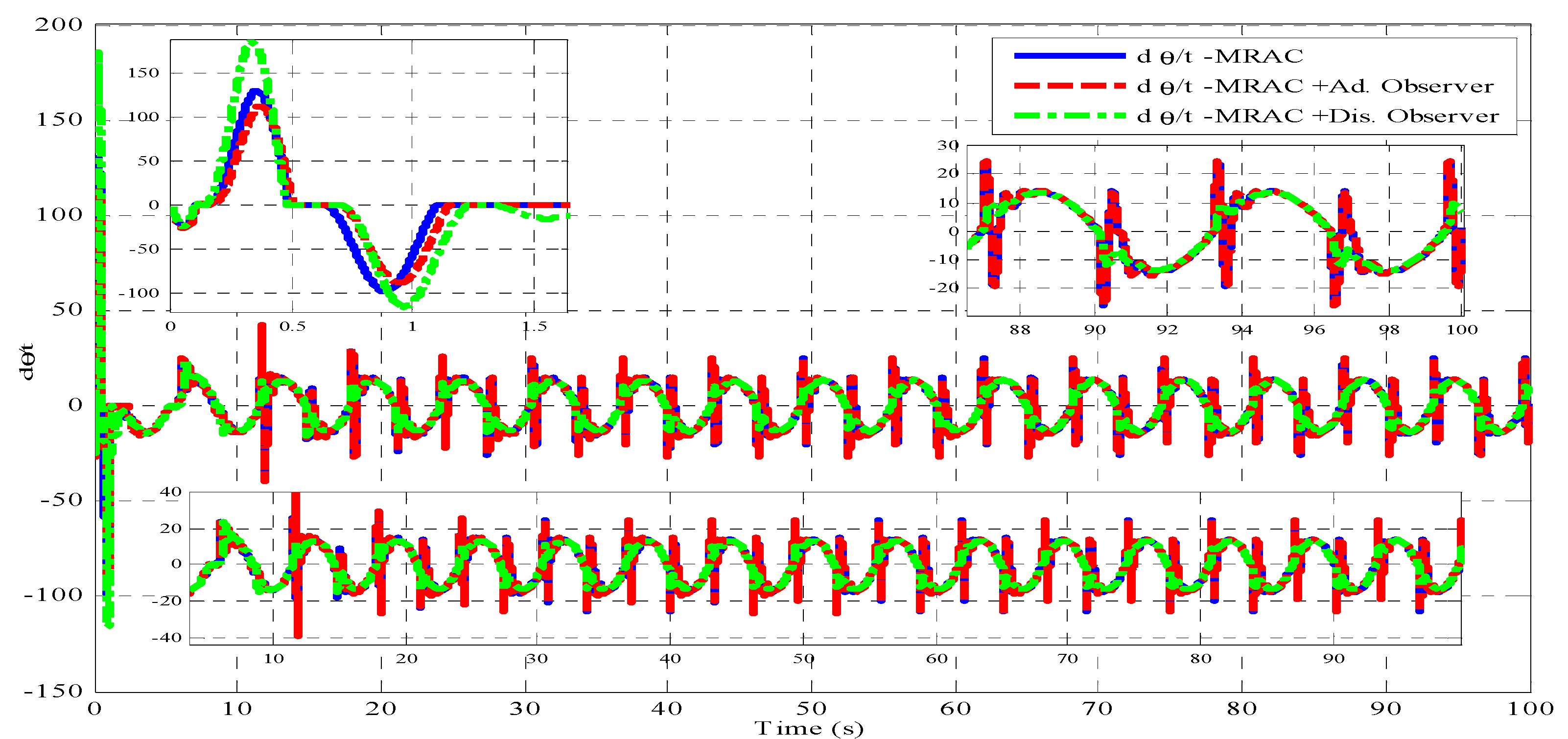
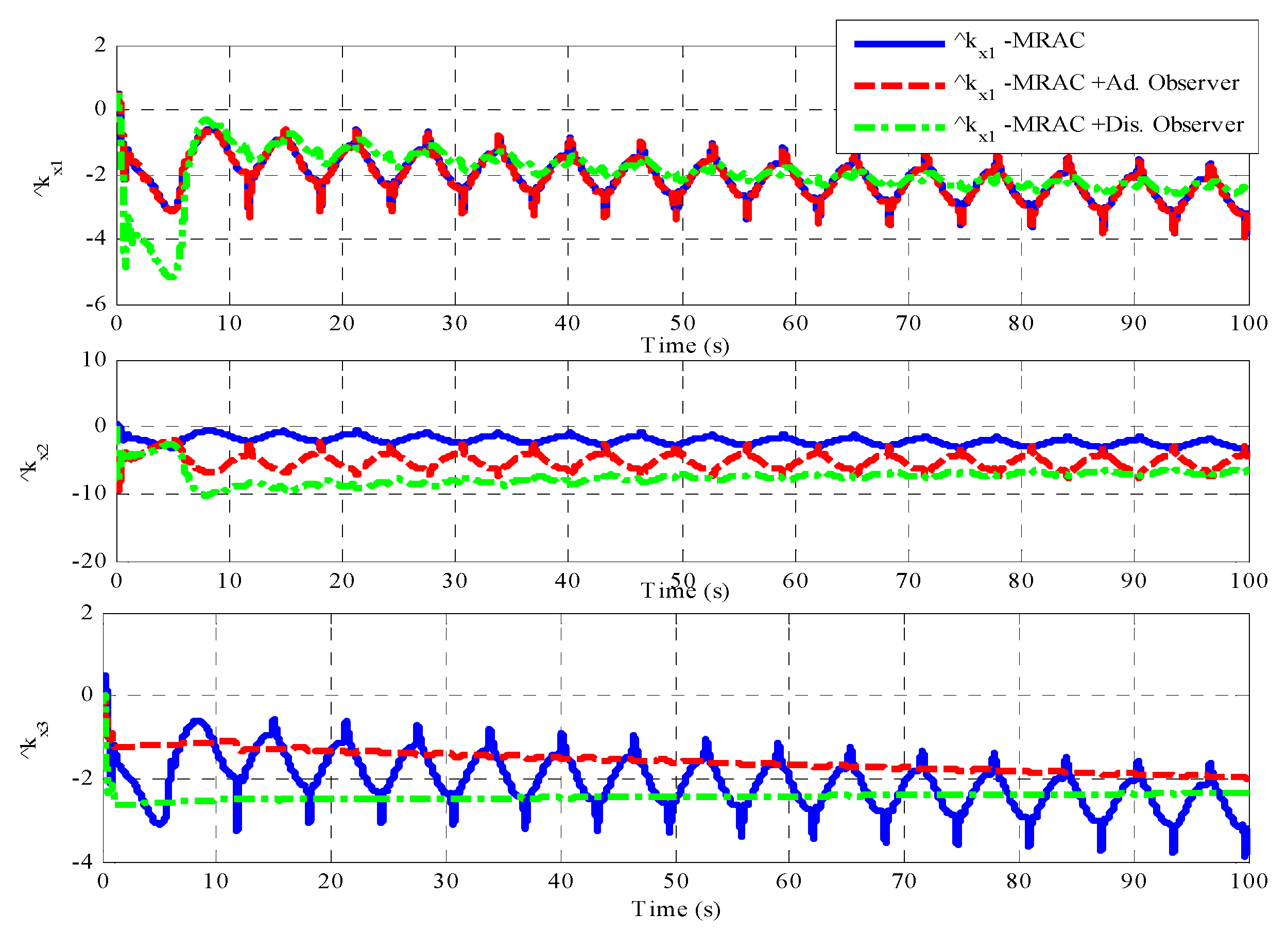
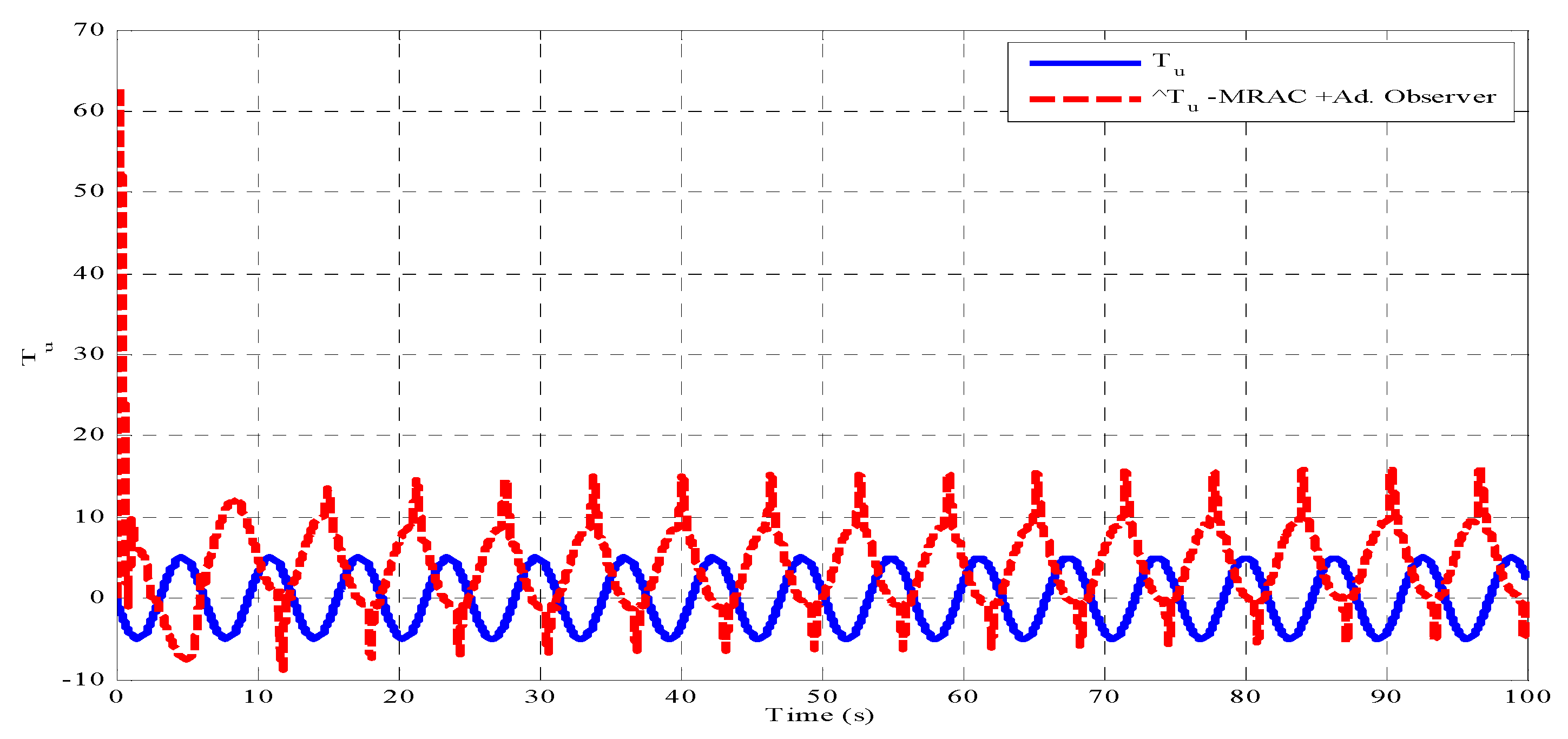
4. Simulated Results
- □
- The desired position trajectory is taken as sinusoidal waveform ranges between (−45 to −75 Deg.) with initial condition of −60 Deg.
- □
- The load torque is simulated as sinusoidal signal having the following maximum bounds:
- □
- (), which is entirely unknown with upper bounded limit, is treated as controller ineffectiveness.
- □
- A challenge of increment in inertia by 12% is added to test the totally unknown environment to the controller which avoided by most literature.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- World Health Organization. Enconomic Costs of Stroke. Available online: http://www.who.int/cardiovascular_diseases/en/cvd_atlas_17_economics.pdf?ua=1 (accessed on 24 January 2022).
- Ergin, M.A.; Patoglu, V. A self-adjusting knee exoskeleton for robot assisted treatment of knee injuries. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4917–4922. [Google Scholar]
- Veerbeek, J.M.; Langbroek-Amersfoort, A.C.; Van Wegen, E.E.; Meskers, C.G.; Kwakkel, G. Effects of Robot-Assisted Therapy for the Upper Limb After Stroke. Neurorehabil. Neural Repair. 2017, 31, 107–121. [Google Scholar] [CrossRef] [PubMed]
- Rifaï, H.; Mohammed, S.; Daachi, B.; Amirat, Y. Adaptive control of a human-driven knee joint orthosis. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2486–2491. [Google Scholar]
- Sherwani, K.I.; Kumar, N.; Chemori, A.; Khan, M.; Mohammed, S. RISE-based adaptive control for EICoSI exoskeleton to assist knee joint mobility. Robot. Auton. Syst. 2019, 124, 103354. [Google Scholar] [CrossRef] [Green Version]
- Raheema, M.N.; Kadhim, D.A.; Hussein, J.S. Design an intelligent hybrid position/force control for above knee prosthesis based on adaptive neuro-fuzzy inference system. Indones. J. Electr. Eng. Comput. Sci. 2021, 23, 675–685. [Google Scholar] [CrossRef]
- Ding, G.; Huo, W.; Huang, J.; Amirat, Y.; Mohammed, S. Robust and Safe Control of a Knee Joint Orthosis. In Proceedings of the 2018 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Shenyang, China, 24–27 August 2018; pp. 343–348. [Google Scholar]
- Mefoued, S.; Mohammed, S.; Amirat, Y. Knee joint movement assistance through robust control of an actuated orthosis. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1749–1754. [Google Scholar]
- Scandaroli, G.G.; Borges, G.A.; da Rocha, A.F.; Nascimento, F.A. Adaptive Knee Joint Control for an Active Amputee Prosthesis. In Proceedings of the 2008 IEEE Latin American Robotic Symposium, Salvador, Brazil, 29–30 October 2008; pp. 164–169. [Google Scholar]
- Ajayi, M.O.; Djouani, K.; Hamam, Y. Bounded Control of an Actuated Lower-Limb Exoskeleton. J. Robot. 2017, 2017. [Google Scholar] [CrossRef] [Green Version]
- Aguilar-Sierra, H.; Yu, W.; Salazar, S.; Lopez-Gutierrez, J.R. Design and control of hybrid actuation lower limb exoskeleton. Adv. Mech. Eng. 2015, 7, 1–13. [Google Scholar] [CrossRef]
- Lee, T.; Lee, D.; Song, B.; Baek, Y.S. Design and Control of a Polycentric Knee Exoskeleton Using an Electro-Hydraulic Actuator. Sensors 2020, 20, 211. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rifaï, H.; Abdessalem, M.S.B.; Chemori, A.; Mohammed, S.; Amirat, Y. Augmented L1 adaptive control of an actuated knee joint exoskeleton: From design to real-time experiments. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5708–5714. [Google Scholar]
- Mefoued, S.; Belkhiat, D.E.C. A Robust Control Scheme Based on Sliding Mode Observer to Drive a Knee-Exoskeleton. Asian J. Control. 2019, 21, 439–455. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Du, Z.; He, L.; Wang, J.; Wu, D.; Dong, W. Active Disturbance Rejection With Fast Terminal Sliding Mode Control for a Lower Limb Exoskeleton in Swing Phase. IEEE Access 2019, 7, 72343–72357. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Chen, L.; Guo, S. Observer-based finite-time control for trajectory tracking of lower extremity exoskeleton. Proc. Inst. Mech. Eng. Part I: J. Syst. Control. Eng. 2021, 236, 257–269. [Google Scholar] [CrossRef]
- Chevalier, A.; Ionescu, C.M.; De Keyser, R. Analysis of robustness to gain variation in a fractional-order PI controller for knee joint motion. In Proceedings of the ICFDA’14 International Conference on Fractional Differentiation and Its Applications 2014, Catania, Italy, 23–25 June 2014; pp. 1–6. [Google Scholar]
- Kaur, S.; Sagar, S.; Sondhi, S. Internal model control based fractional order PID controller for knee joint motion. In Proceedings of the 2016 11th International Conference on Industrial and Information Systems (ICIIS), Roorkee, India, 3–4 December 2016; pp. 318–322. [Google Scholar]
- Mefoued, S.; Mohammed, S.; Amirat, Y. Toward Movement Restoration of Knee Joint Using Robust Control of Powered Orthosis. IEEE Trans. Control. Syst. Technol. 2013, 21, 2156–2168. [Google Scholar] [CrossRef]
- Mefoued, S. A robust adaptive neural control scheme to drive an actuated orthosis for assistance of knee movements. Neurocomputing 2014, 140, 27–40. [Google Scholar] [CrossRef]
- Wang, T.K.; Ju, M.S.; Tsuei, Y.G. Adaptive Control of Above Knee Electro-Hydraulic Prosthesis. J. Biomech. Eng. 1992, 114, 421–424. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Wang, J.; Li, W.; Wang, J.; Yang, P. A model-free control method for estimating the joint angles of the knee exoskeleton. Adv. Mech. Eng. 2018, 10, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Humaidi, A.J.; Hameed, A.H.; Hameed, M.R. Robust adaptive speed control for DC motor using novel weighted E-modified MRAC. In Proceedings of the IEEE International Conference on Power, Control, Signals and Instrumentation Engineering, ICPCSI, Chennai, India, 21–22 September 2017. [Google Scholar]
- Humaidi, A.; Hameed, A. Robustness enhancement of MRAC using modification techniques for speed control of three phase induction motor. J. Electr. Syst. 2017, 13, 723–741. [Google Scholar]
- Humaidi, A.J.; Hussein, H.A. Adaptive Control of Parallel Manipulator in Cartesian Space. In Proceedings of the 2019 3rd IEEE International Conference on Electrical, Computer and Communication Technologies, ICECCT, Coimbatore, Tamil Nadu, India, 20–22 February 2019. [Google Scholar]
- Humaidi, A.J.; Kadhim, S.K.; Gataa, A.S. Optimal Adaptive Magnetic Suspension Control of Rotary Impeller for Artificial Heart Pump. Cybern. Syst. 2022, 53, 141–167. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Hameed, A.H. Design and comparative study of advanced adaptive control schemes for position control of electronic throttle valve. Information 2019, 10, 65. [Google Scholar] [CrossRef] [Green Version]
- Hameed, A.H.; Al-Dujaili, A.Q.; Humaidi, A.J.; Hussein, H.A. Design of terminal sliding position control for electronic throttle valve system: A performance comparative study. Int. Rev. Autom. Control. 2019, 12, 251–260. [Google Scholar] [CrossRef]
- Chen, M.; Chen, W.H. Sliding mode control for a class of uncertain nonlinear system based on disturbance observer. Int. J. Adapt. Control. Signal Process. 2010, 24, 51–64. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Conventional sliding mode observers. In Sliding Mode Control and Observation; Springer: Berlin/Heidelberg, Germany, 2014; pp. 105–141. [Google Scholar]
- Lavretsky, E.; Wise, K. Robust and Adaptive Control; Springer: London, UK, 2013. [Google Scholar]
- Ajel, A.R.; Humaidi, A.J.; Ibraheem, I.K.; Azar, A.T. Robust Model Reference Adaptive Control for Tail-Sitter VTOL Aircraft. Actuators 2021, 10, 162. [Google Scholar] [CrossRef]
- Nguyen, T. Model-Reference Adaptive Control; Springer International Publishing AG: Cham, Switzerland, 2018. [Google Scholar]
- Humaidi, A.J.; Hameed, A.H.; Ibraheem, I.K. Design and performance study of two sliding mode backstepping control schemes for roll channel of delta wing aircraft. In Proceedings of the 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Ma, Z.; Sun, G. Dual terminal sliding mode control design for rigid robotic manipulator. J. Frankl. Inst. 2018, 355, 9127–9149. [Google Scholar] [CrossRef]
- Su, Y.; Zheng, C. A new nonsingular integral terminal sliding mode control for robot manipulators. Taylor Fr. Int. J. Syst. Sci. 2020, 51, 1418–1428. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Hameed, M.R. Design and performance investigation of block-backstepping algorithms for ball and arc system. In Proceedings of the IEEE International Conference on Power, Control, Signals and Instrumentation Engineering, ICPCSI, Chennai, India, 21–22 September 2017; pp. 325–332. [Google Scholar]
- Gao, G.; Zhang, S.; Ye, M. Global robust super-twisting algorithm with adaptive switching gains for a hybrid robot. Int. J. Adv. Robot. Syst. 2020, 17, 1–12. [Google Scholar] [CrossRef]
- Ahmed, S.; Ahmed, A.; Mansoor, I.; Junejo, F.; Saeed, A. Output Feedback Adaptive Fractional-Order Super-Twisting Sliding Mode Control of Robotic Manipulator. Iran. J. Sci. Technol. Trans. Electr. Eng. 2020, 45, 335–347. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Kadhim, S.K.; Gataa, A.S. Development of a Novel Optimal Backstepping Control Algorithm of Magnetic Impeller-Bearing System for Artificial Heart Ventricle Pump. Cybern. Syst. 2020, 51, 521–541. [Google Scholar] [CrossRef]
- Baek, J.; Jin, M.; Han, S. A new adaptive sliding mode control scheme for application to robot manipulators. IEEE Trans. Ind. Electron. 2016, 63, 3628–3634. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Abdulkareem, A.I. Design of augmented nonlinear PD controller of Delta/Par4-like robot. J. Control. Sci. Eng. 2019, 2019, 7689673. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Hameed, M.R.; Hameed, A.H. Design of block-backstepping controller to ball and arc system based on zero dynamic Theory. J. Eng. Sci. Technol. 2018, 13, 2084–2105. [Google Scholar]
- Humaidi, A.J.; Talaat, E.N.; Hameed, M.R.; Hameed, A.H. Design of Adaptive Observer-Based Backstepping Control of Cart-Pole Pendulum System. In Proceedings of the 2019 3rd IEEE International Conference on Electrical, Computer and Communication Technologies, ICECCT 2019, Tamil Nadu, India, 20–22 February 2019. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Parameters | Value |
|---|---|
| 0.323 kg.m2/rad | |
| 0.000105 Kg | |
| 0.35 N.m.s/rad | |
| 0.059 N.m/A | |
| 0.25 m | |
| 9.8 N |
| Controller | Error of the Time Samples | Mean Error | Control Effort of the Time Samples | Mean Control | ||||
|---|---|---|---|---|---|---|---|---|
| t1 = 20 | t2 = 60 | t3 = 80 | t1 = 20 | t2 = 60 | t3 = 80 | |||
| MRAC | 1 deg | 2 deg | 4 deg | 2.33 deg | 5.8 v | 2.1 v | 6.5 v | 5.1 v |
| MRAC with adaptive disturbance estimator | 1 deg | 2 deg | 4 | 2.33 deg | 5.8 v | 2.1 v | 6.4 v | 5 v |
| MRAC with nonlinear disturbance observer | 0 deg | 0 deg | 1 deg | 0.335 deg | 5.76 v | 2 v | 3.2 v | 4.3 v |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aljuboury, A.S.; Hameed, A.H.; Ajel, A.R.; Humaidi, A.J.; Alkhayyat, A.; Mhdawi, A.K.A. Robust Adaptive Control of Knee Exoskeleton-Assistant System Based on Nonlinear Disturbance Observer. Actuators 2022, 11, 78. https://doi.org/10.3390/act11030078
Aljuboury AS, Hameed AH, Ajel AR, Humaidi AJ, Alkhayyat A, Mhdawi AKA. Robust Adaptive Control of Knee Exoskeleton-Assistant System Based on Nonlinear Disturbance Observer. Actuators. 2022; 11(3):78. https://doi.org/10.3390/act11030078
Chicago/Turabian StyleAljuboury, Anwer S., Akram Hashim Hameed, Ahmed R. Ajel, Amjad J. Humaidi, Ahmed Alkhayyat, and Ammar K. Al Mhdawi. 2022. "Robust Adaptive Control of Knee Exoskeleton-Assistant System Based on Nonlinear Disturbance Observer" Actuators 11, no. 3: 78. https://doi.org/10.3390/act11030078