
Pneumatic Soft Robots: Challenges and Benefits



1
Department of Electronics, Information and Bioengineering, Politecnico di Milano, 20133 Milan, Italy
2
School of Automation, Guangdong University of Technology, Guangzhou 510006, China
3
School of Art, Soochow University, Suzhou 215006, China
*
Author to whom correspondence should be addressed.
Actuators 2022, 11(3), 92; https://doi.org/10.3390/act11030092
Submission received: 8 January 2022
/
Revised: 1 March 2022
/
Accepted: 5 March 2022
/
Published: 16 March 2022
(This article belongs to the Special Issue Robot Control in Human-Machine Systems)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:In the field of robotics, soft robots have been showing great potential in the areas of medical care, education, service, rescue, exploration, detection, and wearable devices due to their inherently high flexibility, good compliance, excellent adaptability, and natural and safe interactivity. Pneumatic soft robots occupy an essential position among soft robots because of their features such as lightweight, high efficiency, non-pollution, and environmental adaptability. Thanks to its mentioned benefits, increasing research interests have been attracted to the development of novel types of pneumatic soft robots in the last decades. This article aims to investigate the solutions to develop and research the pneumatic soft robot. This paper reviews the status and the main progress of the recent research on pneumatic soft robots. Furthermore, a discussion about the challenges and benefits of the recent advancement of the pneumatic soft robot is provided.
1. Introduction
Although the traditional rigid robot can achieve complex and accurate motion, it often needs a large number of rigid link joints to achieve multi-redundant motion control. This type of rigid connection robot is usually called a redundant or hyper-redundant robot [1,2]. The robot needs to have some flexibility to avoid damage to fragile objects and the human body during the task. Because traditional robots usually use rigid drives and rigid joints, the industry usually needs several related sensors or technologies such as posture, force feedback, and machine vision to perform compliant control of the output power to improve the security of rigid robots. When it refers to the above challenges, these types of robots have initially been referred to as soft robots [2]. But with the development of soft material, bionics, and manufacturing technology, the concept of soft robots, i.e. robots whose main body is made of soft materials and whose motion is achieved mainly by elastic deformation of the structure itself, is gradually emphasized. Compared with the traditional rigid robot, the soft robot has infinite degrees of freedom in principle. Its good safety and flexibility make up for the shortcomings of a rigid robot, showing unprecedented adaptability, safety, sensitivity, and constantly expanding the application areas of robots. Hence soft robot has been one of the main trends in robotics development.
Soft robotics research directions are divided into the following three main categories.
- (1)
- The traditional pneumatic or cable drive-based research, such as the German company Festo’s pneumatic soft robot and pneumatic artificial muscle and so on [3]. The pneumatic and cable drive-based soft robot research has been investigated for over 20 years. Various actuators and control techniques have been developed.
- (2)
- Elastic silicone material is used as the main material of the soft robot, combining with the latest 3D printing technology. These robots are primarily characterized by pneumatic driven, small pressure-bearing, large deformation, and flexible motion control [4].
- (3)
- Using advanced smart materials, such as dielectric elastomer (DE) [5], shape memory alloy (SMA) [6] to generate motion by deformation of materials, which is a new application of smart materials in the field of soft robotics and it has a broad application prospect in the field of micro and small robots. Soft robots can be driven by gas, wire, smart material, and so on [7]. Among them, pneumatic technology was firstly used in the design of soft robots and had the characteristics of lightweight, good flexibility, and strong adaptability to the environment. Moreover, the pneumatic soft robot can be driven without ferromagnetic or electronic components with good reliability under harsh conditions under the strong radiation [8], electromagnetic interference [9], dust, external extrusion, and heavy impacts [7]. It has been well recognized that the pneumatic soft robot has occupied an important position in the research of soft robotics. This article reviews the status and the main progress of the recent research on pneumatic soft robots. This article aims to investigate the solutions to develop and research the pneumatic soft robot.
The structure of this paper is organized as follows: the motivation and types of the soft pneumatic robots are provided in Section 1 and Section 2. Section 3 describes the detailed development, modeling, and control of the soft pneumatic robots. Section 4 discusses the challenges and benefits involved in different applications. Finally, the conclusion is drawn in Section 5.
2. Pneumatic Soft Actuators
The pneumatic drive of soft robots is divided into positive and negative pressure drives. The positive pressure driving technique is to drive the soft actuator by moving, deforming, and filling the cavity with compressed gas to expand the main body. In contrast, the negative one is to control the soft actuators to move and deform by drawing the air out of the cavity through vacuuming, which causes the cavity to shrink [10].
According to the structure difference, the typical pneumatic actuators can be divided into two main types: pneumatic Networks (PneuNets) and fiber-constrained actuators.
2.1. Pneumatic Networks
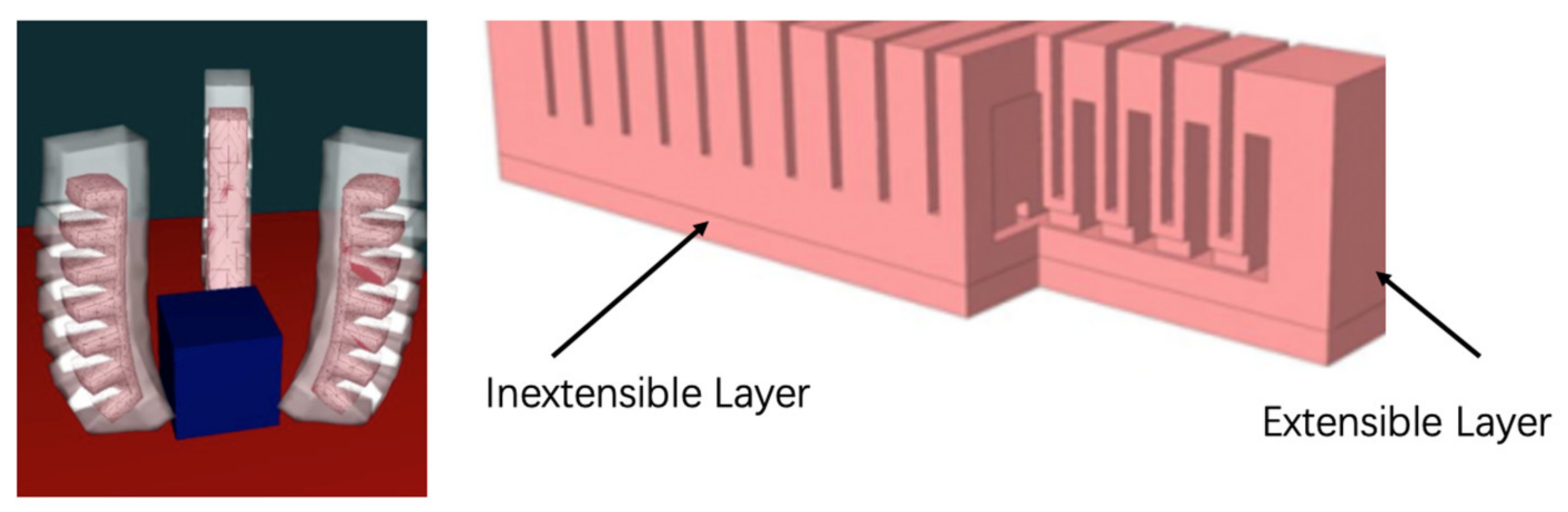
The structure of a typical pneumatic network is shown in Figure 1. The actuator structure can be divided into two layers, the upper layer is the extendable layer, and the lower layer is the restricted layer. The upper layer consists of a linear array of air chambers, which are interconnected internally by an air channel. When inflated, the inner walls of the air cavities of the upper structure expand and squeeze each other, while the bottom layer limits the elongation in the length direction, thus producing a bending motion of the whole driver toward the side of the limiting layer [11].
2.1.1. Flexible Fluidic Actuator (FFA)
The flexible fluidic actuator is an extensible and adaptive soft actuator. FFA is made up of elastomers and several cavity channels embedded in the elastomers. Each channel can be expanded and deformed by applying fluid pressure. The advantage of this actuator is that it is by the biological structure of nature, and the contraction of actuators can produce adaptive flexibility [12].
2.1.2. Honeycomb Pneumatic Networks
Based on the typical Pneumatic Networks, a new structure called the Honeycomb Pneumatic Networks [13] was proposed. The honeycomb aerodynamic network is structured to generate robot moves through the folding-extension deformation of many hexagonal structures, which is called structural deformation actuation. In summary, the honeycomb structure has good bending and elongation capabilities, providing the arm with good flexibility. It has good torsional resistance, which is the basis for the arm’s load capacity.
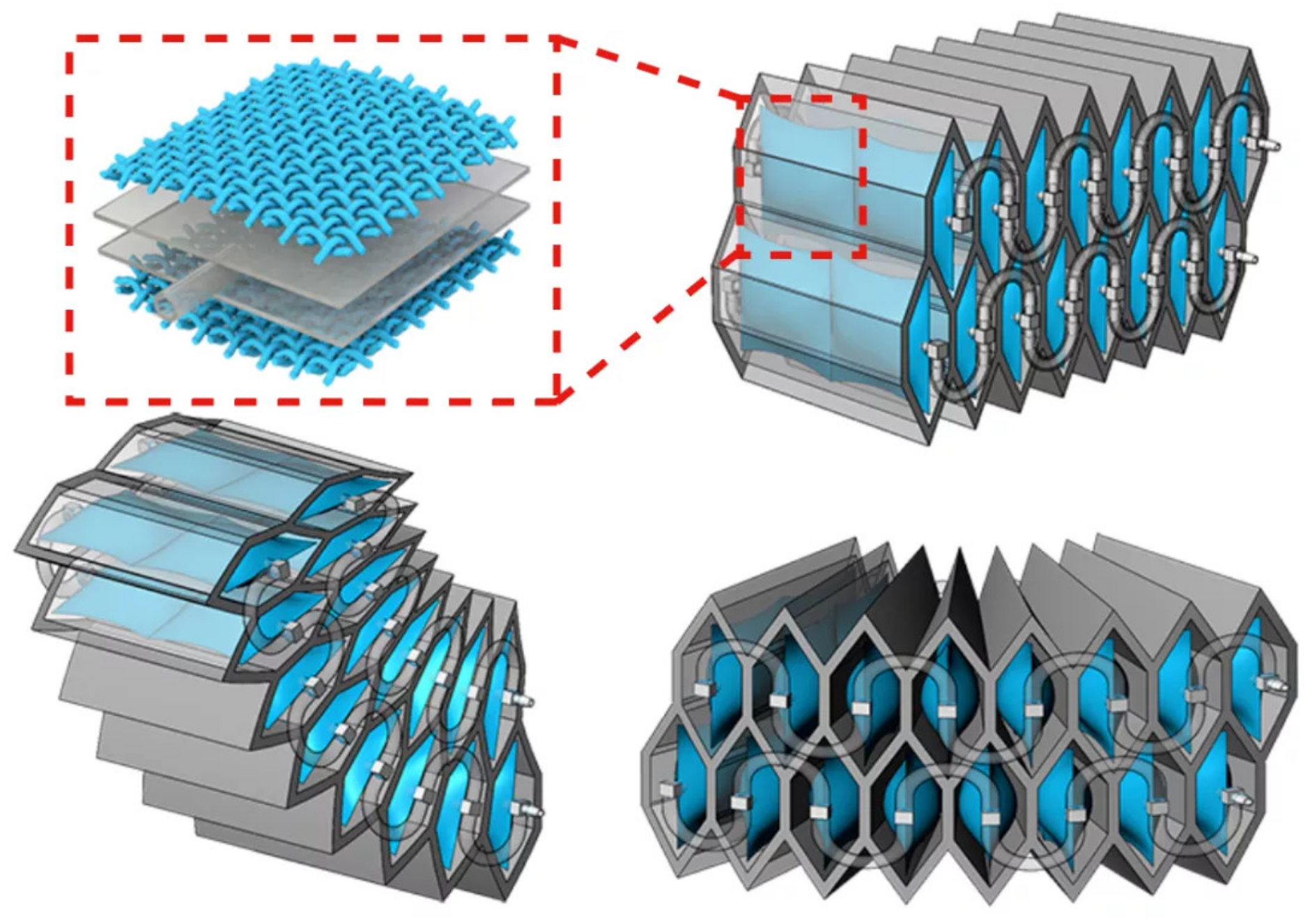
Figure 2 shows the basic structure and working principle of the honeycomb pneumatic network soft arm [14]. Two rows of honeycomb units are arranged in a staggered manner, with two airbags placed on the top and bottom of each unit, and the individual airbags are connected by silicone hoses to form a pneumatic network. The airbag is made of polyurethane nylon fabric, a composite material with excellent airtightness and pressure-bearing properties. When the airbag on one side inflates, the structure on that side will elongate under the action of the airbag, and the other side will deform less due to the restoring force of the structure thus that the whole actuator will bend in the opposite direction. In addition, if all airbags are inflated simultaneously, the soft arm will elongate. By controlling the combination of inflation of individual airbags, the soft arm can achieve multiple bending and elongation deformations.
2.2. Fiber-Constrained Actuators
The most important feature of fiber-constrained pneumatic flexible actuators is that the elastic cavity is reinforced by cuffed or embedded fibers, fabrics, or other fiber-like structures. These constrained structures generally have anisotropic mechanical properties thus that as the actuator’s air pressure increases, the fiber structure will constrain the elastic cavity to produce anisotropic expansion and deformation, thus achieving a specific form of deformation motion [15]. The pneumatic artificial muscle (PAM) is a typical representative of fiber-constrained actuators.
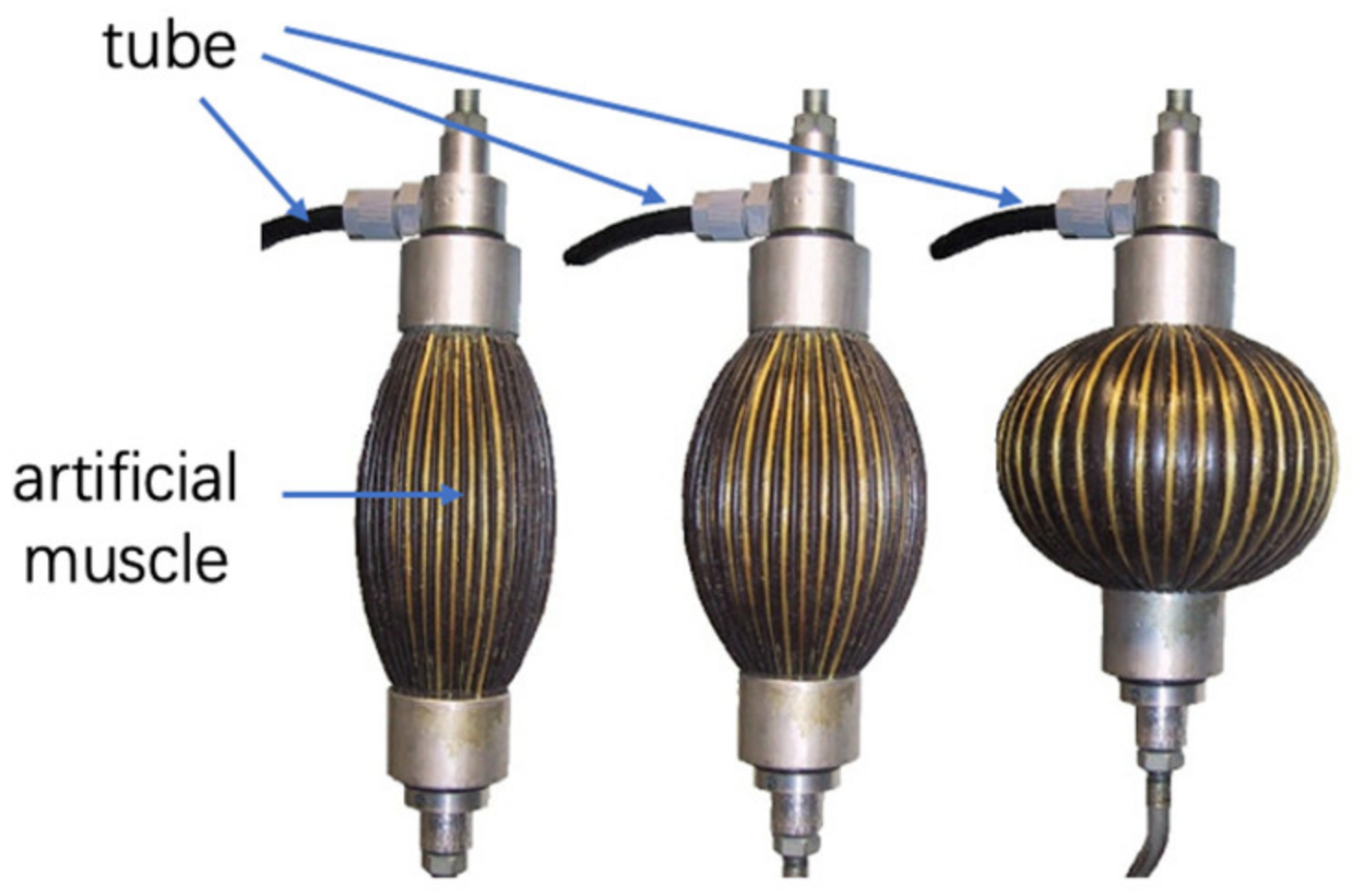
Biological soft tissues and structures have been the object of research and are studied by scientists. The pneumatic artificial muscle is a gas actuator developed by using a bionic design to imitate biological muscles. McKibben artificial muscle (Figure 3) is the most famous pneumatic artificial muscle. The body of the McKibben artificial muscle is a soft hollow rubber tube, and the outside of the tube is wrapped by a coaxial woven sheath [14]. Compared to a cylinder, which is essentially a rigid element, flexible pneumatic artificial muscle is more secure [15]. The basic working principle of pneumatic artificial muscle is pumping highly compressed air into or out of the rubber tube, and achieve the body’s radial expansion or contraction under the restriction of the coaxial woven sheath to generate axial force to drive the robot.
Due to its special structure, a single pneumatic artificial muscle can only provide extension or contraction motion in a single linear direction. Since real robots usually need to achieve complex and variable goals, a single muscle is far from attaining multiple degrees of freedom thus scientists often use multiple artificial muscles to drive the joints of the robot to solve the above challenges.
Pneumatic artificial muscle robots have the following advantages.
- (1)
- Lightweight and small size. Since the main material of pneumatic artificial muscle is rubber (such as neoprene, acrylate rubber, etc.), and aluminum alloy’s metal connection [16], its overall mass is very light. For example, the pneumatic muscle of 5 mm inner diameter produced by Festo is only 27 g per meter.
- (2)
- High gravimetric specific power. The power to weight ratio of pneumatic artificial muscles is very large [17]. For example, a pneumatic artificial muscle with a 20 mm inner diameter is sufficient to provide 1500 N of pulling force, which can satisfy the load demand in practical applications.
- (3)
- Easy installation and smooth motion. Compared with conventional motors, pneumatic artificial muscles do not need to be assembled with gearboxes and other transmission devices. They can be configured in the robot frame by simply connecting sealed plugs and air hoses. Moreover, compared with cylinders, pneumatic muscles do not have sliding parts such as pistons and can be driven more smoothly, and the efficiency of pneumatic potential energy-mechanical energy conversion can be significantly improved [18].
- (4)
- Clean and safe. Pneumatic artificial muscles’ energy source is clean and environmentally friendly, and the movement process will not pollute the environment. At the same time, the pneumatic artificial muscle has good suppleness, which can drive the robot well to achieve flexible active/passive suppleness control in many narrow working environments, or on occasions with strong human-robot interaction, such as surgery and gait rehabilitation training [19]. It is well known that the characteristics of pneumatic artificial muscles have benefits and some shortcomings due to the specific physical structure. This can be summarized as follows:
- Nonlinear and time-varying characteristics. Influenced by the internal compressed air, the pneumatic artificial muscle shows a complex nonlinear relationship between air pressure and contraction length, and its system parameters can often be identified only within a short period of operating air pressure, which poses a challenge to establishing an accurate kinetic model in the entire operating air pressure range [20,21].
- Hysteresis and creep characteristics. Considering the existence of friction between the braided mesh and rubber tube, the elastic deformation of the rubber tube during contraction or diastole, the pneumatic artificial muscle usually has hysteresis and creep effect, which affects the rise of output force [22].
3. Development and Control of the Pneumatic Soft Actuators
3.1. Development of Soft Pneumatic Robots
3D printing technology has gradually become the mainstream production technology for soft robots [23,24]. Moreover, the application of 3D printing technology in the field of soft robots mainly focused on 3D printing soft robot molds and 3D printing soft robot bodies [25,26,27]. Most soft robots [28,29] are made of silicone and cast in 3D printing molds. 3D printing can create molds of complex structures, allowing soft robots [30] to be produced with complex structures [31,32]. The soft robots based on 3D printed bodies are more complex and delicate in their internal structural design. They are less time-consuming and costly to develop because they are directly produced by 3D printing [33,34,35].
In the field of soft robotics, 3D printing technologies currently used are Stereolithography (SLA), Selective Laser Sintering (SLS), Direk Ink Writing (DIW), Shape Deposition Manufacturing (SDM), Fused Deposition Modeling (FDM). The DIW 3D printing is a direct material extrusion printing technology developed from Fused Deposition Modeling. Currently, the DIW 3D printing covers a wide range of production, such as electrical field, biological field, and material field, with many soft materials to choose from. Therefore, the study of soft material 3D printing process parameter optimization for soft robots and the DIW 3D printing of soft robots are the research hotspots in soft robot manufacturing.
The soft robot is flexible and deformable, and the sensors not only require high precision and high bandwidth but also cannot affect the mechanical response performance of the robot [36]. This makes it difficult to apply traditional sensors such as potentiometers and resistance strain gauges, and there is an urgent need to develop new compatible and embeddable sensors.
Flexible sensors on the market, such as FlexSensor, Flexiforce, Bend Sensor, stretch Sensor are based on the principle of resistance or capacitance change of conductive materials under strain. These sensors are flexible and can be used to measure bending, tension, stress. However, the elastic modulus of these sensors is larger than that of silicone materials, which will affect the motion of the soft robot.
To make the sensor better adapted to the needs of soft robots, scholars have explored many new materials and processing processes. For example, the conductive liquid eGaIn is injected into the micro-cavities of the silicon body, and when the body is deformed, the internal cavity changes, thus changing the resistance of the conductive liquid [33]. By changing the arrangement of the inner cavity channels, information such as axial strain, pressure, and bending can be measured [37,38,39]. Using the Hall effect, micro magnets and Hall elements are embedded in different parts of the soft robot body to detect the bending curvature of the robot according to the change of magnetic field strength [40,41,42].
For soft robots with 3D motion, sensors are required to measure 3D information. For example, trakSTARTM embeds a magnetic flux sensor (EM sensor) into the end-effector of the soft body arms, providing real-time feedback on the coordinates and angles of the end using a three-dimensional electromagnetic tracking system [43]. Embedding optical fibers in the robot body to detect the robot’s haptics [44] or deformation [45,46] by changing in internal light intensity. The conductive material is wrapped around an elastic core to make a malleable conductive wire embedded in a pneumatic 3D soft body arm to measure each cavity channel’s length and bending changes [47].
Smart materials can deform and generate voltages under the action of external physical fields, and this feature allows smart materials to be used as sensors, too. For example, artificial muscles made by SMA have self-awareness [48], and the pressure can be measured by the change of capacitance during the deformation of the dielectric elastomer [49].
Because soft robots belong to the category of large deformation of the continuum, better ductile sensing materials are needed to measure the partial pressure and strain of the robot [50]. With the continuous improvement in the performance of sensing materials such as elastic modulus, sensitivity, and stability and the upgrading of relative information processing devices, the sensing technology for soft robots will develop rapidly.
3.2. Modeling of Soft Pneumatic Robots
Essentially different from rigid robots, there is no unified framework for the analysis of these high-degree-of-freedom soft robots [51,52]. Currently, the modeling of soft robots is still using the continuous rigid body equations, and the most commonly used model is the Constant Curvature (CC) model, which assumes that the configuration space of the 3D continuum can be characterized by three parameters [53].
Since a planar continuum robot with constant curvature circular arc coverage has approximately constant curvature in each segment, the CC model is only valid under steady-state conditions. For a multi-segment continuum, the Piecewise Constant Curvature (PCC) model can be obtained by joining each CC segment together [54], which is a common modeling approach for soft robotic arms.
Trivedi proposed a beam theory modeling method for soft robotic manipulators using beam theory and Cosserat elastic rod theory [55]. Martín proposed the natural-CCD algorithm based on the cyclic coordinate descent (CCD) for solving the inverse kinematics problem of hyper-redundant and soft manipulators [56]. Renda proposed an alternative model for multisection soft manipulator dynamics based on a discrete Cosserat approach and developed two effective algorithms [57], which obtained better model accuracy and significantly reduced the computational time. Hyatt proposed a method for determining the approximate kinematic model of a soft robot arm [58], which can precisely locate the end-effector of a large soft robot manipulator, and collect data while moving the soft robot arm.
The above modeling methods have obvious limitations, and errors in practical application or the dynamical equations are too complex and challenging to apply in practical control tasks. Therefore, the modeling of soft robots is still an unconquered problem.
3.3. Control of Soft Pneumatic Robots
3.3.1. Control of Pneumatic Networks
One of the straightforward ways to manage the primary movement of a soft pneumatic robot is to control the pressure of the actuator directly with the reference signal of the pressure sensor equipped on the soft pneumatic robot. Another way is to achieve deformation [59,60,61] with motion sensors [62] to sense the movement or deformation information of the kinematic structure of the soft robot [63] and manage the motion of the actuator by controlling the air intake and exhaust of the actuator. Although it is straightforward to handle the movement of the soft actuator by direct pressure management, it still requires a balance between quick response performance and low accuracy of control. Because of the lack of feedback, the accuracy of the movement is usually cannot be guaranteed. In contrast, direct control of robot motion using deformation or motion sensors requires fewer control algorithms to achieve more accurate control.
In terms of control algorithms, although certain control models, such as the Koopman operator and model predictive control [64,65,66,67,68] can be established by studying nonlinear problems of relatively simple soft robot systems, they often face great difficulties for soft robot systems of higher complexity. Therefore, control methods based on intelligent bionic machine learning [69], neural networks [70,71], and other techniques [72] have been introduced into the study of soft robot control, and are expected to achieve better solutions in soft robot control [1,73].
For example, there is a model-based reinforcement learning method using trajectory optimization and supervised learning [74], which is applied to closed-loop predictive control of a soft robotic manipulator without analyzing the model. However, the method does not examine the relationship between manipulator design and dynamics, making it challenging to identify the sources of modeling errors or develop optimal design strategies.
There is also a non-model approach for real-time sensing of flexible actuators based on embedded soft sensors and recurrent neural nets. This method is highly versatile and can exchange sensor information, sensing modes, and the system itself without any changes to the learning algorithm. However, this method currently relies on an independent external sensing technology to provide reference feedback, and sensors need to be rearranged in different structures.
3.3.2. Control of Pneumatic Muscle
In contrast to traditional rigid robots, there is no unified framework for soft robots’ design, analysis, and control. The current modeling of soft robots usually uses the continuous rigid body equation, and the simplest and most commonly used model of motion assumes that the configuration space of a three-dimensional continuum can be characterized by three parameters, often referred to as the constant curvature (CC) approximation [75,76,77].
LIANG Ding-Kun provides a more systematic discussion of control methods for pneumatic artificial muscle soft robots, which broadly classifies pneumatic muscle-driven robot control methods into three categories: traditional, advanced, and intelligent [16].
Specifically, considering the inherent hysteresis of pneumatic artificial muscles, a control structure is often used to model the hysteresis as a feedforward compensator and then combine it with a conventional feedback controller to achieve good positioning tracking control for pneumatic muscle-driven robots. Meanwhile, considering that the traditional control methods are difficult to deal with the unmodeled dynamics, time-varying, external disturbances, and other uncertainties of the pneumatic muscle system, Lenz A summarized a series of more advanced control methods, such as adaptive control methods, sliding mode control methods, and self-anti-disturbance control methods, which reduce the accuracy requirements of the system model, while being able to compensate for the unmodeled and uncertain [78]. These methods reduce the accuracy requirement of the system model while compensating for unmodeled and uncertain dynamics, suppressing unknown external disturbances, and improving control accuracy and robustness. Further, considering it is sometimes difficult to obtain a complete model of a pneumatic muscle-driven robot. Cao Y, Anh H, Robinson R proposed a series of intelligent control methods, such as neural network control methods, fuzzy control methods, and iterative learning control methods, which can achieve higher accuracy and more robust motion control without relying on a specific model of the system [79].
The dynamics control of soft robots is still an intractable problem. From the study of current soft robot control methods, it is clear that non-model methods show good control due to the lack of better analytical models. Applying machine learning to the learning of dynamic mapping from actuator space to task space is a feasible research method [80].
4. Challenges and Benefits in the Application
4.1. Griper in the Manufacturing
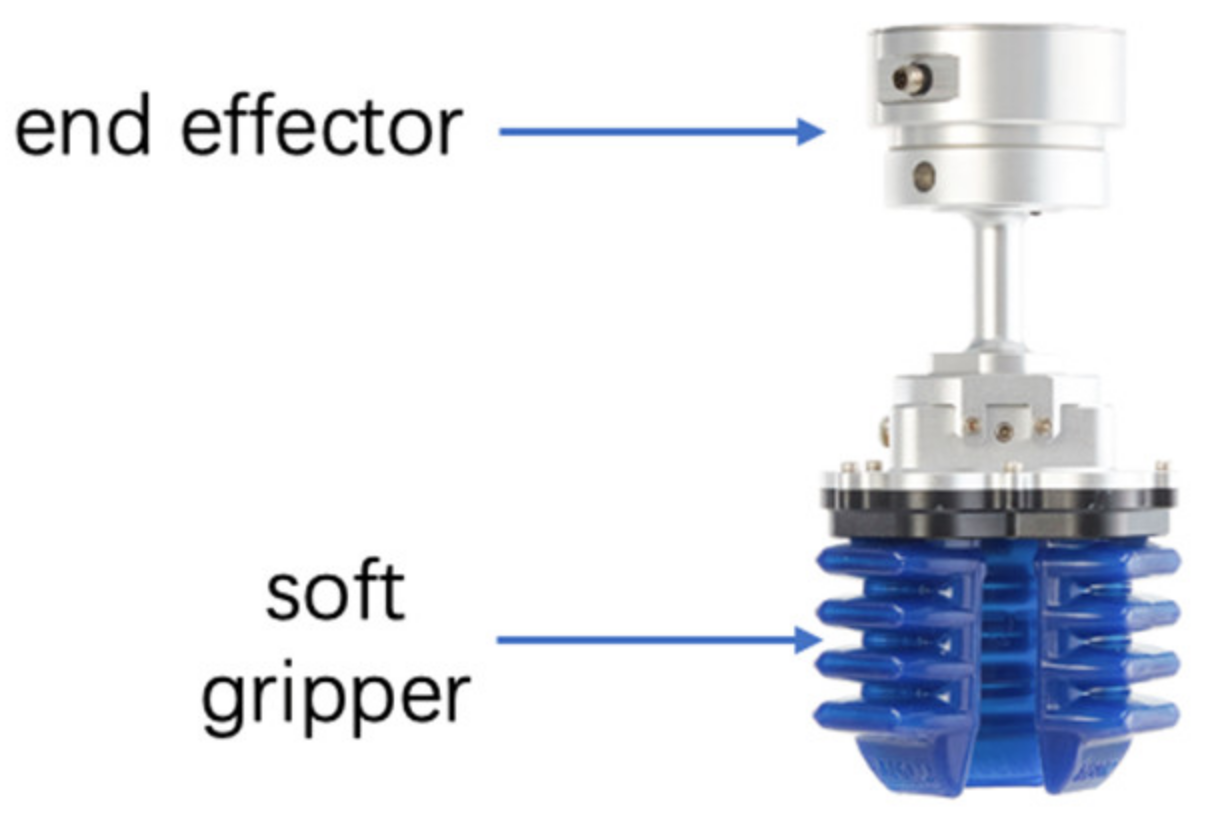
Complex application scenarios and continuous increases in labor costs have prompted companies to upgrade their automated production iterations. The soft gripper has attracted increasing attention, particularly for manufacturing, such as the SFG soft gripper [81], as shown in Figure 4. It should be mentioned that the pneumatically powered elastic soft gripper qualifies for a lightweight, elegant, and full-bodied setup. The elastic and nonskid characters of the pneumatically powered elastic soft gripper adapt to different shapes. Its performance has guaranteed the soft actuators as excellent choices for soft gripping and dedicating objects. The soft material, combined with its straightforward handling, makes it a safe choice for human-robot collaboration in manufacturing.
Various soft robots have been developed for manufacturer production and medical applications in the related works [82]. Moreover, the corresponding gripper control techniques have been studied and investigated [83]. SRT’s SFG soft gripper (Figure 4) can achieve safe and stable gripping of fragile and irregular shaped items in production scenarios and can easily complete a series of repetitive operations such as automatic sorting and packing, which are widely used in food, fresh food, 3C electronics, auto parts, daily chemicals, logistics and warehousing, pharmaceuticals and other industries [81].
For example, FESTO is a leading supplier of industrial automation technology in the field of pneumatic technology and bionic design. FESTO has combined its advanced pneumatic technology with the bionic design of elephant trunks and octopus tentacles in recent years and has launched the following three generations of pneumatic soft robots.
The Bionic Handling Assistant [84], shown in Figure 5, looks similar to a pliable gripper arm with a structure and overall function modeled on an elephant’s trunk. It is powered by corrugated pneumatic muscles and is made of polyamide using the selective laser sintering process (SLS). The Bionic Handling Assistant has many multi-degree-of-freedom soft drive units, thus it has strong flexibility.
The Bionic Handling Assistant offers free mobility and pliable operation. It can guarantee safe human-machine interaction. In the event of a collision, the pneumatic bellows structure gives way immediately and, therefore, does not have to be carefully shielded from humans such as conventional robots [85,86]. As a result, the Bionic Handling Assistant offers a new way to easily and efficiently solve the problem of humans and machines interacting safely in the factories of the future.
4.2. Bionic Application
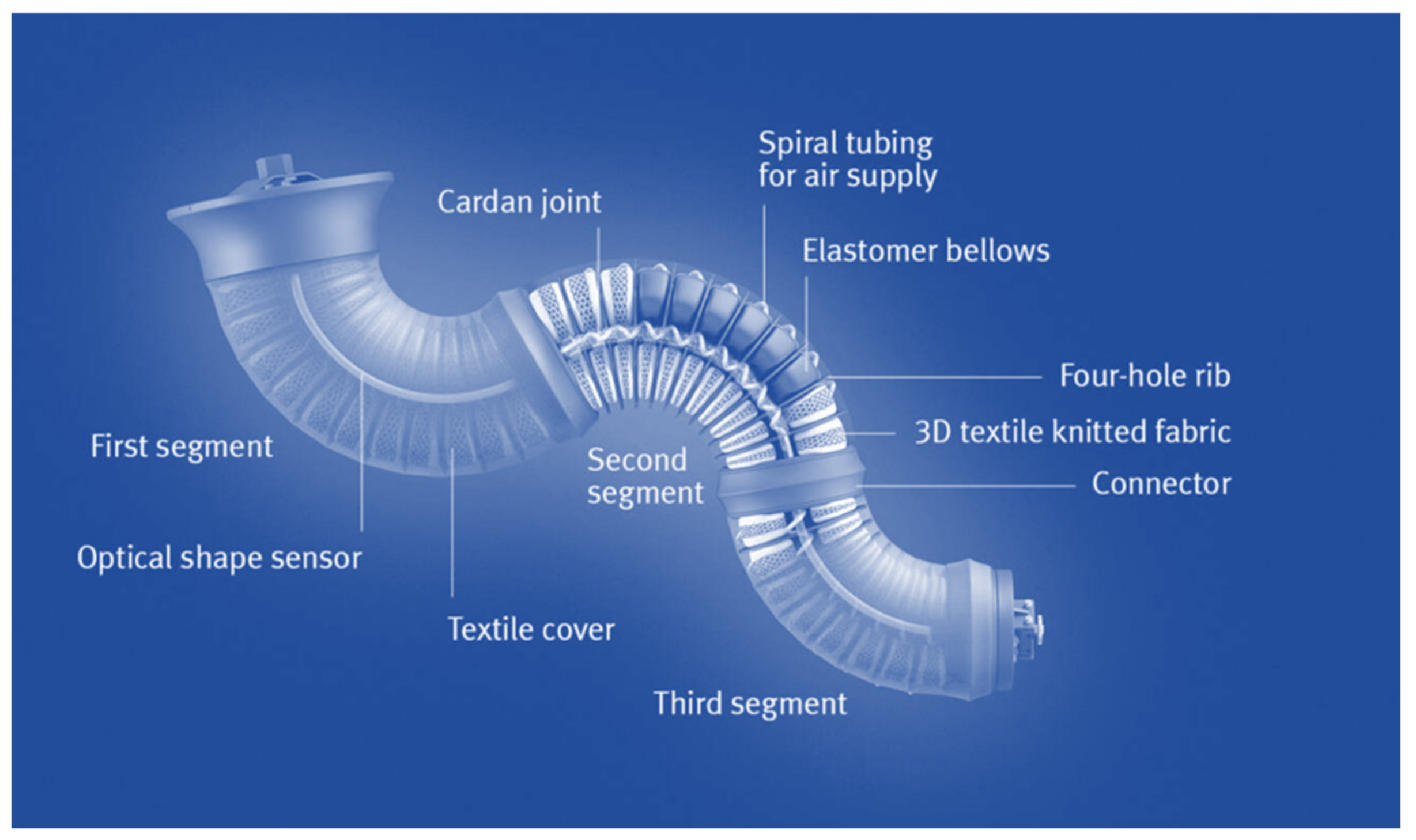
The BionicMotionRobot [87], shown in Figure 6, is a lightweight robot with a natural form of motion. The pneumatic lightweight robot has 12 degrees of freedom and has a payload of three kilograms.
The arm of the BionicMotionRobot [87] consists of three flexible basic segments, each moved by four pneumatic bellows. The complex control and regulation of the 12 flexible bellows structures are performed by the Festo Motion Terminal VTEM. An optical shape sensor along the system’s longitudinal axis records the whole kinematics’ position, shape, and interactions. Thanks to this modular design, the arm can bend in three different directions simultaneously and smoothly execute the natural movements of its biological prototype.
The bellows are made of sturdy elastomer. Each of them is covered with a particular 3D textile knitted fabric, which functions amazingly similar to nature. Similar to the muscle fibers in an octopus’s tentacles, its filaments are oriented to permit the bellow configurations to expand in the required direction of movement whilst limiting this in the other directions. It is only thanks to this new fiber technology that the power potential of the entire kinematics can be exploited.
Thanks to its safe interaction and natural motion processes, the BionicMotionRobot has excellent potential in a wide range of industries: especially in monotonous, repetitive, and even dangerous activities. It can act as a third hand that plays a supporting role in assembly, relieving the burden on humans.
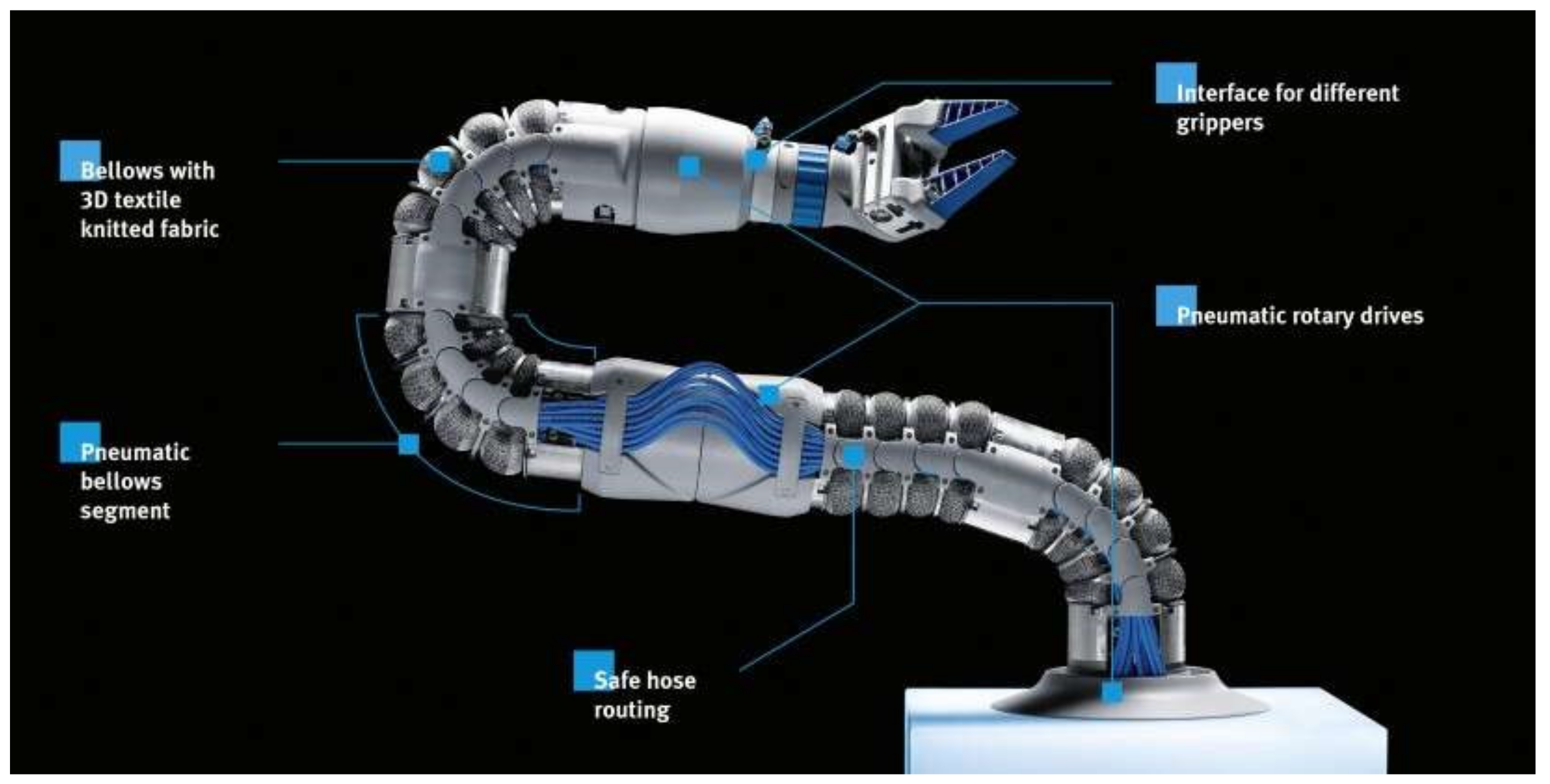
The BionicSoftArm [88], shown in Figure 7, is a modular pneumatic lightweight robot. Thanks to its modular design, the robot can be used for a wide range of applications. It can grip and manipulate a wide range of objects and shapes in combination with various adaptive pneumatic grippers. Depending on the requirements, the length of the BionicSoftArm can be varied with up to seven pneumatic actuators, thus providing maximum flexibility in terms of range and mobility. This makes it very easy to implement applications that are difficult to realize with a standard robot.
4.3. Medical Application
Continuous Passive Motion (CPM) [89] is a theory of rehabilitation medicine that suggests continuous passive motion training can assist patients in repairing damaged motor nerves, which means that CPM therapy can effectively reduce the likelihood of disability in patients with motor dysfunction. A variety of rehabilitation exoskeleton robots have been developed to enable patients to perform physical interaction or in the community on their own [90,91,92]. Exoskeletal rehabilitation robots not only assist patients with extension, flexion, and twisting movements but also restore the motor function of the deviated part of the body gradually during the continuous wearing training. Among them, the pneumatic soft rehabilitation exoskeleton device has outstanding features of high safety and simple structure and occupies an important position in the rehabilitation robotics industry.
For example, a team at the Chinese University of Hong Kong used a 3D-printed soft robotic glove (Figure 8) to help with hand rehabilitation training for stroke patients with hemiplegia of the hand. The glove uses pneumatic soft actuators to drive passive movements of the hand to help patients regain hand function for activities of daily living, providing personalized and cost-effective rehabilitation training [93,94].
Except for the rehabilitation training, open-loop position control of soft Hydraulic Actuators for Minimally Invasive Surgery has also been developed in recent years [95,96]. Although soft pneumatic robots deliver desirable attributes for applications in minimally invasive surgery, it is still challenging for practical application in the clinical scenario. There was a short variety in the instrument designs and various attributes concerning their surgical manipulation performance. Except for the benefits of flexible manipulation, the main challenges are thin geometries, and it needs to have completely bubble-free actuators to avoid leakage or failure, the high aspect ratio [97], etc.
5. Summary and Discussion
Current research on pneumatic soft robots [98] has demonstrated that pneumatic soft robots can interact with humans and environments [99,100,101] in unique ways, move over unknown terrain, and grasp objects of irregular shape and posture. These basic operations open the door to applications where robots work closely with humans [102,103]. Thanks to its mentioned benefits, increasing research interests have been attracted to the development of novel types of pneumatic soft robots [104] in the last decades. This article aims to investigate the solutions to develop and research the pneumatic soft robot. This paper reviews the status and the main progress of the recent research on pneumatic soft robots.
As the robot continues to move toward practicality [105], its improvements in sensitivity, strength, and efficiency become increasingly important. Meanwhile, soft robots’ unmanned and intelligent control is an important direction for future development. It is believed that in the near future, with the integration of industrial design into related technologies, advances in this field will produce new lifestyles and industry changes, allowing intelligent pneumatic soft robots to serve all aspects of society and production.
Author Contributions
Conceptualization, H.S. and W.Q.; literature collection, X.H.; writing—original draft preparation, H.S.; writing—review and editing, X.H. and X.Z.; visualization, J.G.; supervision, S.C., X.X. and W.Q. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Leng, J.; Sun, J.; Guan, Q.; Liu, Y. Status of and trends in soft pneumatic robotics. Sci. Sin. Technol. 2020, 50, 897–934. [Google Scholar] [CrossRef]
- Albu-Schaffer, A.; Eiberger, O.; Grebenstein, M.; Haddadin, S.; Ott, C.; Wimbock, T.; Wolf, S.; Hirzinger, G. Soft robotics. IEEE Robot. Autom. Mag. 2008, 15, 20–30. [Google Scholar] [CrossRef]
- Rolf, M.; Steil, J.J. Constant curvature continuum kinematics as fast approximate model for the bionic handling assistant. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; IEEE: Piscataway, NJ, USA, 2012; p. 6385596. [Google Scholar]
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Zhu, Y.; Zhao, D.; Luan, Y. Performance investigation of cone dielectric elastomer actuator using Taguchi method. Chin. J. Mech. Eng. 2011, 24, 685–692. [Google Scholar] [CrossRef] [Green Version]
- Laschi, C.; Cianchetti, M.; Mazzolai, B. Soft robot arm inspired by the octopus. Adv. Robot. 2012, 26, 709–727. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Galloway, K.C.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Yirmibeşoğlu, O.D.; Oshiro, T.T.; Olson, G.; Palmer, C.; Mengüç, Y. Evaluation of 3d printed soft robots in radiation environments and comparison with molded counterparts. Front. Robot. AI 2019, 6, 40. [Google Scholar] [CrossRef] [Green Version]
- Yap, H.K.; Kamaldin, N.; Lim, J.H.; Nasrallah, F.A.; Goh, J.C.H.; Yeow, C.H. A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging. IEEE Trans. Neural. Syst. Rehabil. Eng. 2017, 6, 782–793. [Google Scholar] [CrossRef]
- Yan, J.H.; Shi, P.P.; Zhang, X.B. Review of biomimetic mechanism, actuation, modeling and control in soft manipulators. J. Mech. Eng. 2018, 54, 1–14. [Google Scholar] [CrossRef]
- Galloway, K.C.; Polygerinos, P.; Walsh, C.J.; Wood, R.J. Mechanically programmable bend radius for fiber-reinforced soft actuators. In Proceedings of the 2013 16th International Conference on Advanced Robotics (ICAR), Montevideo, Uruguay, 25–29 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Helps, T.; Rossiter, J. Proprioceptive flexible fluidic actuators using conductive working fluids. Soft Robot. 2018, 5, 175–189. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fengyu, X.; Fanchang, M.; Baojie, F.; Gaoliang, P.; Jingjin, S.; Guoping, J. Review of driving methods, modeling and application in soft robots. J. Nanjing Univ. Posts Telecommun. 2019, 39, 64–75. [Google Scholar]
- Jiang, H.; Wang, Z.; Jin, Y.; Chen, X.; Li, P.; Gan, Y.; Chen, X. Hierarchical control of soft manipulators towards unstructured interactions. Int. J. Robot. Res. 2021, 40, 411–434. [Google Scholar] [CrossRef]
- Tondu, B.; Lopez, P. Modeling and control of McKibben artificial muscle robot actuators. IEEE Control Syst. Mag. 2000, 20, 15–38. [Google Scholar]
- Liang, D.; Chen, Y.; Sun, N.; Wu, Y.; Liu, L.; Fang, Y. Overview of control methods for pneumatic artificial muscle-actuated robots. Control Decis. 2021, 36, 27–41. [Google Scholar]
- Robinson, R.M.; Kothera, C.S.; Wereley, N.M. Variable recruitment testing of pneumatic artificial muscles for robotic manipulators. IEEE/ASME Trans. Mechatron. 2015, 20, 1642–1652. [Google Scholar] [CrossRef]
- Wakimoto, S.; Misumi, J.; Suzumori, K. New concept and fundamental experiments of a smart pneumatic artificial muscle with a conductive fiber. Sensors and Actuators A. Physical 2016, 250, 48–54. [Google Scholar]
- Zheng, H.; Wu, M.L.; Shen, X.R. Pneumatic variable series elastic actuator. J. Dyn. Syst. Meas. Control 2016, 138, 081011. [Google Scholar] [CrossRef] [Green Version]
- Daerden, F.; Lefeber, D. Pneumatic artificial muscles: Actuators for robotics and automation. Eur. J. Mech. Environ. Eng. 2002, 47, 11–21. [Google Scholar]
- Zhang, D.; Zhao, X.; Han, J. Active model-based control for pneumatic artificial muscle. IEEE Trans. Ind. Electron. 2016, 64, 1686–1695. [Google Scholar] [CrossRef]
- Felt, W.; Chin, K.Y.; Remy, C.D. Contraction sensing with smart braid McKibben muscles. IEEE/ASME Trans. Mechatron. 2015, 21, 1201–1209. [Google Scholar] [CrossRef]
- Wallin, T.J.; Pikul, J.; Shepherd, R.F. 3D printing of soft robotic systems. Nat. Rev. Mater. 2018, 3, 84–100. [Google Scholar] [CrossRef]
- Truby, R.L.; Lewis, J.A. Printing soft matter in three dimensions. Nature 2016, 540, 371–378. [Google Scholar] [CrossRef] [PubMed]
- Rajappan, A.; Jumet, B.; Preston, D.J. Pneumatic soft robots take a step toward autonomy. Sci. Robot. 2021, 6, eabg6994. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Chen, Y.; Ren, T.; Li, Y.; Choi, S.H. Precharged Pneumatic Soft Actuators and Their Applications to Untethered Soft Robots. Soft Robot. 2018, 5, 567–575. [Google Scholar] [CrossRef]
- Scharff, R.B.N.; Fang, G.; Tian, Y.; Wu, J.; Geraedts, J.M.P.; Wang, C.C.L. Sensing and Reconstruction of 3-D Deformation on Pneumatic Soft Robots. IEEE/ASME Trans. Mechatron. 2021, 26, 1877–1885. [Google Scholar] [CrossRef]
- Breitman, P.; Matia, Y.; Gat, A.D. Fluid Mechanics of Pneumatic Soft Robots. Soft Robot. 2021, 8, 519–530. [Google Scholar] [CrossRef] [PubMed]
- He, Q.; Cai, S. Soft pumps for soft robots. Sci. Robot. 2021, 6, eabg6640. [Google Scholar] [CrossRef] [PubMed]
- Rus, D.; Tolley, M.T. Design, fabrication and control of origami robots. Nat. Rev. Mater. 2018, 3, 101–112. [Google Scholar] [CrossRef]
- Gul, J.Z.; Yang, B.S.; Yang, Y.J.; Chang, D.E.; Choi, K.H. In situ UV curable 3D printing of multi-material tri-legged soft bot with spider mimicked multi-step forward dynamic gait. Smart Mater. Struct. 2016, 25, 115009. [Google Scholar] [CrossRef] [Green Version]
- Hinton, T.J.; Jallerat, Q.; Palchesko, R.N.; Park, J.H.; Grodzicki, M.S.; Shue, H.J.; Ramadan, M.H.; Hudson, A.R.; Feinberg, A.W. 3D printing PDMS elastomer in a hydrophilic support bath via freeform reversible embedding. ACS Biomater. Sci. Eng. 2016, 2, 1781–1786. [Google Scholar] [CrossRef] [PubMed]
- Hinton, T.J.; Jallerat, Q.; Palchesko, R.N.; Park, J.H.; Grodzicki, M.S.; Shue, H.J.; Ramadan, M.H.; Hudson, A.R.; Feinberg, A.W. Three-dimensional printing of complex biological structures by freeform reversible embedding of suspended hydrogels. Sci. Adv. 2015, 1, e1500758. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nyberg, E.L.; Farris, A.L.; Hung, B.P.; Dias, M.; Garcia, J.R.; Dorafshar, A.H.; Grayson, W.L. 3D-printing technologies for craniofacial rehabilitation, reconstruction, and regeneration. Ann. Biomed. Eng. 2017, 45, 45–57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rossiter, J.; Walters, P.; Stoimenov, B. Printing 3D dielectric elastomer actuators for soft robotics[C]//Electroactive polymer actuators and devices (EAPAD) 2009. Int. Soc. Opt. Photonics 2009, 7287, 72870H. [Google Scholar]
- Landgraf, M.; Reitelshöfer, S.; Franke, J.; Hedges, M. Aerosol jet printing and lightweight power electronics for dielectric elastomer actuators. In Proceedings of the 2013 3rd International Electric Drives Production Conference (EDPC), Nuremberg, Germany, 29–30 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–7. [Google Scholar]
- Carreño-Morelli, E.; Martinerie, S.; Bidaux, J.E. Three-dimensional printing of shape memory alloys. Trans. Tech. Publ. Ltd. 2007, 534, 477–480. [Google Scholar]
- Qiao, H.; Chen, J.; Huang, X. A Survey of Brain-Inspired Intelligent Robots: Integration of Vision, Decision, Motion Control, and Musculoskeletal Systems. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Kramer, R.K.; Majidi, C.; Wood, R.J. Wearable tactile keypad with stretchable artificial skin. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1103–1107. [Google Scholar]
- Park, Y.L.; Chen, B.R.; Wood, R.J. Design and fabrication of soft artificial skin using embedded microchannels and liquid conductors. IEEE Sens. J. 2012, 12, 2711–2718. [Google Scholar] [CrossRef]
- Farrow, N.; Correll, N. A soft pneumatic actuator that can sense grasp and touch. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2317–2323. [Google Scholar]
- Bilodeau, R.A.; White, E.L.; Kramer, R.K. Monolithic fabrication of sensors and actuators in a soft robotic gripper. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2324–2329. [Google Scholar]
- Ozel, S.; Keskin, N.A.; Khea, D.; Onal, C.D. A precise embedded curvature sensor module for soft-bodied robots. Sens. Actuators A Phys. 2015, 236, 349–356. [Google Scholar] [CrossRef]
- Dobrzynski, M.K.; Pericet-Camara, R.; Floreano, D. Contactless deflection sensor for soft robots. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1913–1918. [Google Scholar]
- Ozel, S.; Skorina, E.H.; Luo, M.; Tao, W.; Chen, F.; Pan, Y.; Onal, C.D. A composite soft bending actuation module with integrated curvature sensing. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Sweden, Sweden, 16–21 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 4963–4968. [Google Scholar]
- Sun, Y.; Song, S.; Liang, X.; Ren, H. A miniature soft robotic manipulator based on novel fabrication methods. IEEE Robot. Autom. Lett. 2016, 1, 617–623. [Google Scholar] [CrossRef]
- Sareh, S.; Jiang, A.; Faragasso, A.; Noh, Y.; Nanayakkara, T.; Dasgupta, P.; Seneviratne, L.D.; Wurdemann, H.A.; Althoefer, K. Bio-inspired tactile sensor sleeve for surgical soft manipulators. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1454–1459. [Google Scholar]
- Searle, T.C.; Althoefer, K.; Seneviratne, L.; Liu, H. An optical curvature sensor for flexible manipulators. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 4415–4420. [Google Scholar]
- Sareh, S.; Noh, Y.; Li, M.; Ranzani, T.; Liu, H.; Althoefer, K. Macrobend optical sensing for pose measurement in soft robot arms. Smart Mater. Struct. 2015, 24, 125024. [Google Scholar] [CrossRef]
- Wurdemann, H.A.; Sareh, S.; Shafti, A.; Noh, Y.; Faragasso, A.; Chathuranga, D.S.; Liu, H.; Hirai, S.; Althoefer, K. Embedded electro-conductive yarn for shape sensing of soft robotic manipulators. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 8026–8029. [Google Scholar]
- Zhang, J.J.; Yin, Y.H.; Zhu, J.Y. Electrical resistivity-based study of self-sensing properties for shape memory alloy-actuated artificial muscle. Sensors 2013, 13, 12958–12974. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.; Tee, B.C.; Stoltenberg, R.M.; Chen, C.V.; Barman, S.; Muir, B.V.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef] [PubMed]
- Tianmiao, W.; Yufei, H.A.O.; Xingbang, Y.; Wen, L. Soft robotics: Structure, actuation, sensing and control. J. Mech. Eng. 2017, 53, 1–13. [Google Scholar]
- Li, X.; Sun, K.; Guo, C.; Liu, T.; Liu, H. Enhanced static modeling of commercial pneumatic artificial muscles. Assem. Autom. 2020, 40, 407–417. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, L.; Galloway, K.; Godage, I.; Simaan, N.; Barth, E. Modal-Based Kinematics and Contact Detection of Soft Robots. Soft Robot. 2021, 8, 298–309. [Google Scholar] [CrossRef]
- Hannan, M.W.; Walker, I.D. Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots. J. Robot. Syst. 2003, 20, 45–63. [Google Scholar] [CrossRef]
- Webster, R.J., III; Jones, B.A. Design and kinematic modeling of constant curvature continuum robots: A review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Trivedi, D.; Lotfi, A.; Rahn, C.D. Geometrically exact models for soft robotic manipulators. IEEE Trans. Robot. 2008, 24, 773–780. [Google Scholar] [CrossRef]
- Martin, A.; Barrientos, A.; Del Cerro, J. The natural-CCD algorithm, a novel method to solve the inverse kinematics of hyper-redundant and soft robots. Soft Robot. 2018, 5, 242–257. [Google Scholar] [CrossRef]
- Renda, F.; Boyer, F.; Dias, J.; Seneviratne, L. Discrete cosserat approach for multisection soft manipulator dynamics. IEEE Trans. Robot. 2018, 34, 1518–1533. [Google Scholar] [CrossRef] [Green Version]
- Hyatt, P.; Kraus, D.; Sherrod, V.; Rupert, L.; Day, N.; Killpack, M.D. Configuration estimation for accurate position control of large-scale soft robots. IEEE/ASME Trans. Mechatron. 2018, 24, 88–99. [Google Scholar] [CrossRef]
- Rogers, E.; Polygerinos, P.; Walsh, C.; Goldfield, E. Smart and connected actuated mobile and sensing suit to encourage motion in developmentally delayed infants. J. Med. Devices 2015, 9, 3. [Google Scholar] [CrossRef]
- Park, Y.L.; Wood, R.J. Smart pneumatic artificial muscle actuator with embedded microfluidic sensing. In Proceedings of the SENSORS 2013 IEEE, Baltimore, MD, USA, 3–6 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–4. [Google Scholar]
- Galloway, K.C.; Chen, Y.; Templeton, E.; Rife, B.; Godage, I.S.; Barth, E.J. Fiber Optic Shape Sensing for Soft Robotics. Soft Robot. 2019, 6, 671–684. [Google Scholar] [CrossRef] [PubMed]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of soft fiber-reinforced bending actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef] [Green Version]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bruder, D.; Gillespie, B.; Remy, C.D.; Vasudevan, R. Modeling and control of soft robots using the koopman operator and model predictive control. arXiv 2019, arXiv:1902.02827. [Google Scholar]
- Yu, X.; He, W.; Li, Y.; Xue, C.; Li, J.; Zou, J.; Yang, C. Bayesian estimation of human impedance and motion intention for human-robot collaboration. IEEE Trans. Cybern. 2019, 51, 1822–1834. [Google Scholar] [CrossRef] [PubMed]
- Zhong, S.; Zhou, J.; Qiao, H. Bioinspired Gain-Modulated Recurrent Neural Network for Controlling Musculoskeletal Robot. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–15. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Sun, Y.; Yan, Z.; Yang, C.; Li, Z.; Kaynak, O. Disturbance observer-based neural network control of cooperative multiple manipulators with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 1735–1746. [Google Scholar] [CrossRef]
- Su, H.; Mariani, A.; Ovur, S.E.; Menciassi, A.; Ferrigno, G.; De Momi, E. Toward Teaching by Demonstration for Robot-Assisted Minimally Invasive Surgery. IEEE Trans. Autom. Sci. Eng. 2021, 18, 484–494. [Google Scholar] [CrossRef]
- Chen, J.; Qiao, H. Motor-Cortex-Like Recurrent Neural Network and Multi-Tasks Learning for the Control of Musculoskeletal Systems. IEEE Trans. Cogn. Dev. Syst. 2020, 1. [Google Scholar] [CrossRef]
- He, W.; Xue, C.; Yu, X.; Li, Z.; Yang, C. Admittance-based controller design for physical human–robot interaction in the constrained task space. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1937–1949. [Google Scholar] [CrossRef]
- Xu, F.; Wang, H.; Chen, W.; Wang, J. Adaptive visual servoing control for an underwater soft robot. Assem. Autom. 2018, 38, 669–677. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Model-based reinforcement learning for closed-loop dynamic control of soft robotic manipulators. IEEE Trans. Robot. 2018, 35, 124–134. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, W.; Hao, D.; Yun, C. Hysteresis Modeling and Application of Mckibben Pneumatic Artificial Muscles. J. Mech. Eng. 2019, 55, 73–80. [Google Scholar] [CrossRef]
- Pedro, P.; Ananda, C.; Rafael, P.B.; Carlos, A.R.; Alexandre, B.C. Closed structure soft robotic gripper. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 66–70. [Google Scholar]
- Lenz, A.; Anderson, S.R.; Pipe, A.G.; Melhuish, C.; Dean, P.; Porrill, J. Cerebellar-inspired adaptive control of a robot eye actuated by pneumatic artificial muscles. IEEE Trans. Syst. Man Cybern. Part B 2009, 39, 1420–1433. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Huang, J.; Xiong, C. Single-layer Learning Based Predictive Control with Echo State Network for Pneumatic Muscle Actuators-driven Exoskeleton. IEEE Trans. Cogn. Dev. Syst. 2020, 13, 80–90. [Google Scholar] [CrossRef]
- Anh, H.P.H.; Son, N.N.; Van Kien, C. Adaptive neural compliant force-position control of serial PAM robot. J. Intell. Robot. Syst. 2018, 89, 351–369. [Google Scholar] [CrossRef]
- Sekine, T.; Wang, Y.F.; Hong, J.; Takeda, Y.; Miura, R.; Watanabe, Y.; Abe, M.; Mori, Y.; Wang, Z.; Kumaki, D.; et al. Artificial Cutaneous Sensing of Object Slippage using Soft Robotics with Closed-Loop Feedback Process. Small Sci. 2021, 1, 2100002. [Google Scholar] [CrossRef]
- Robinson, R.M.; Kothera, C.S.; Sanner, R.M.; Wereley, N.M. Nonlinear control of robotic manipulators driven by pneumatic artificial muscles. IEEE/ASME Trans. Mechatron. 2015, 21, 55–68. [Google Scholar] [CrossRef]
- Causey, G. Guidelines for the design of robotic gripping systems. Assem. Autom. 2003, 23, 18–28. [Google Scholar] [CrossRef] [Green Version]
- Grzesiak, A.; Becker, R.; Verl, A. The bionic handling assistant: A success story of additive manufacturing. Assem. Autom. 2011, 31, 329–334. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y.; Yamazaki, K.; Bai, M.; Chen, Y. Development of a Soft Robot Based Photodynamic Therapy for Pancreatic Cancer. IEEE/ASME Trans. Mechatron. 2021, 26, 2977–2985. [Google Scholar] [CrossRef]
- Liu, Q.; Shi, C.; Zhang, B.; Wang, C.; Duan, L.; Sun, T.; Zhang, X.; Li, W.; Wu, Z.; Fujie, M.G. Development of a novel paediatric surgical assist robot for tissue manipulation in a narrow workspace. Assem. Autom. 2017, 37, 335–348. [Google Scholar] [CrossRef]
- Mayer, A.; Müller, D.; Raisch, A.; Hildebrandt, A.; Sawodny, O. Demonstration-based Programming of Multi-Point Trajectories for Collaborative Continuum Robots. IFAC-PapersOnLine 2019, 52, 513–518. [Google Scholar] [CrossRef]
- Müller, D.; Veil, C.; Seidel, M.; Sawodny, O. One-Shot kinesthetic programming by demonstration for soft collaborative robots. Mechatronics 2020, 70, 102418. [Google Scholar] [CrossRef]
- Driscoll, S.W.; Giori, N.J. Continuous passive motion (CPM): Theory and principles of clinical application. J. Rehabil. Res. Dev. 2000, 37, 179–188. [Google Scholar]
- Yu, Q.; Shang, W.; Zhao, Z.; Cong, S.; Li, Z. Robotic Grasping of Unknown Objects Using Novel Multilevel Convolutional Neural Networks: From Parallel Gripper to Dexterous Hand. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1730–1741. [Google Scholar] [CrossRef]
- Zhou, J.; Li, Z.; Li, X.; Wang, X.; Song, R. Human-Robot Cooperation Control Based on Trajectory Deformation Algorithm for a Lower Limb Rehabilitation Robot. IEEE/ASME Trans. Mechatron. 2021, 26, 3128–3138. [Google Scholar] [CrossRef]
- Heung, K.H.; Tang, Z.Q.; Ho, L.; Tung, M.; Li, Z.; Tong, R.K. Design of a 3D printed soft robotic hand for stroke rehabilitation and daily activities assistance. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 65–70. [Google Scholar]
- Connolly, C. Pneumatic modules for automatic applications. Assem. Autom. 2009, 29, 321–325. [Google Scholar] [CrossRef]
- Wang, C.; Li, S. Research Status of the Soft Robot. Micronanoelectron. Technol. 2019, 56, 948–991. [Google Scholar]
- Su, H.; Yang, C.; Ferrigno, G.; De Momi, E. Improved Human–Robot Collaborative Control of Redundant Robot for Teleoperated Minimally Invasive Surgery. IEEE Robot. Autom. Lett. 2019, 4, 1447–1453. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Qi, W.; Hu, Y.; Karimi, H.R.; Ferrigno, G.; De Momi, E. An Incremental Learning Framework for Human-Like Redundancy Optimization of Anthropomorphic Manipulators. IEEE Trans. Ind. Inform. 2020, 18, 1864–1872. [Google Scholar] [CrossRef]
- Runciman, M.; Avery, J.; Darzi, A.; Mylonas, G. Open Loop Position Control of Soft Hydraulic Actuators for Minimally Invasive Surgery. Appl. Sci. 2021, 11, 7391. [Google Scholar] [CrossRef]
- Garcia, L.; Kerns, G.; O’Reilley, K.; Okesanjo, O.; Lozano, J.; Narendran, J.; Broeking, C.; Ma, X.; Thompson, H.; Njeuha, P.N.; et al. The Role of Soft Robotic Micromachines in the Future of Medical Devices and Personalized Medicine. Micromachines 2021, 13, 28. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Qi, W.; Chen, J.; Zhang, D. Fuzzy Approximation-based Task-Space Control of Robot Manipulators With Remote Center of Motion Constraint. IEEE Trans. Fuzzy Syst. 2022. [Google Scholar] [CrossRef]
- Qi, W.; Su, H. A Cybertwin based Multimodal Network for ECG Patterns Monitoring using Deep Learning. IEEE Trans. Ind. Inform. 2022. [Google Scholar] [CrossRef]
- Decroly, G.; Lambert, P.; Delchambre, A. A Soft Pneumatic Two-Degree-of-Freedom Actuator for Endoscopy. Front. Robot. AI 2021, 8, 768236. [Google Scholar] [CrossRef]
- Trumić, M.; Jovanović, K.; Fagiolini, A. Decoupled nonlinear adaptive control of position and stiffness for pneumatic soft robots. Int. J. Robot. Res. 2020, 40, 277–295. [Google Scholar] [CrossRef]
- Schmitt, F.; Piccin, O.; Barbé, L.; Bayle, B. Soft Robots Manufacturing: A Review. Front. Robot. AI 2018, 31, 84. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Wang, M.Y. Design Optimization of Soft Robots: A Review of the State of the Art. IEEE Robot. Autom. Mag. 2020, 27, 27–43. [Google Scholar] [CrossRef]
- Shih, B.; Shah, D.; Li, J.; Thuruthel, T.G.; Park, Y.L.; Iida, F.; Bao, Z.; Kramer-Bottiglio, R.; Tolley, M.T. Electronic skins and machine learning for intelligent soft robots. Sci. Robot. 2020, 5, 41. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
PneuNets structure [12].
Figure 1.
PneuNets structure [12].

Figure 2.
The honeycomb pneumatic networks arm [15].
Figure 2.
The honeycomb pneumatic networks arm [15].

Figure 3.
McKibben artificial muscle.
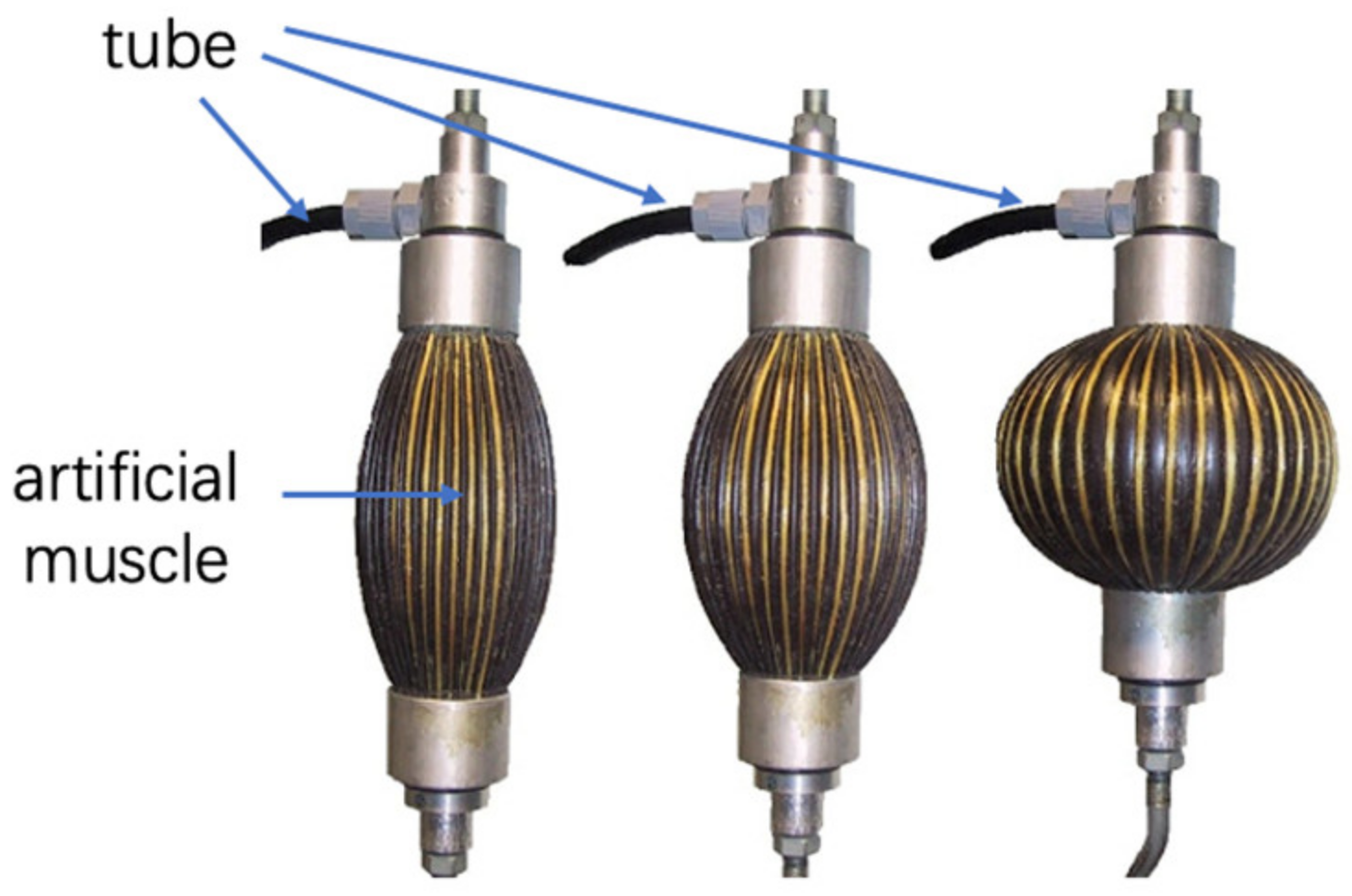
Figure 4.
SFG soft gripper [81].
Figure 4.
SFG soft gripper [81].
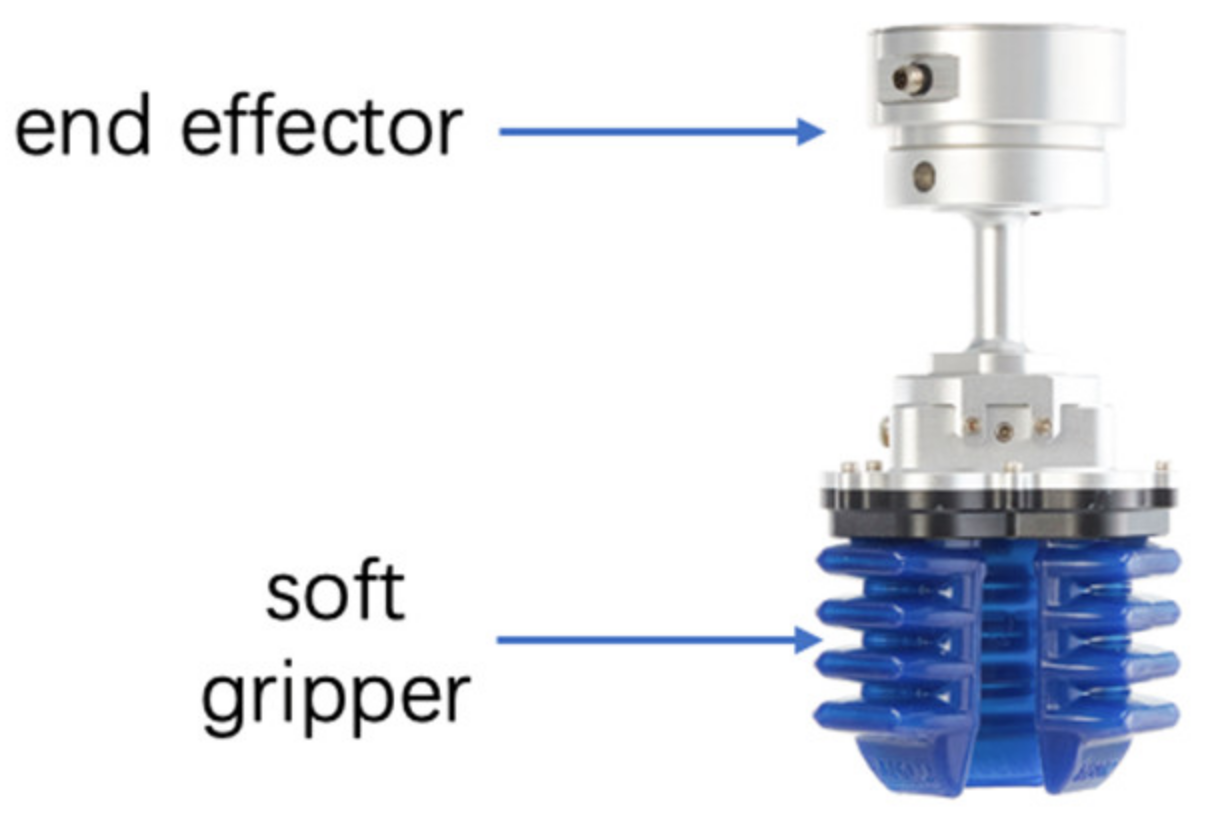
Figure 5.
Bionic Handling Assistant (2010) [84].
Figure 5.
Bionic Handling Assistant (2010) [84].
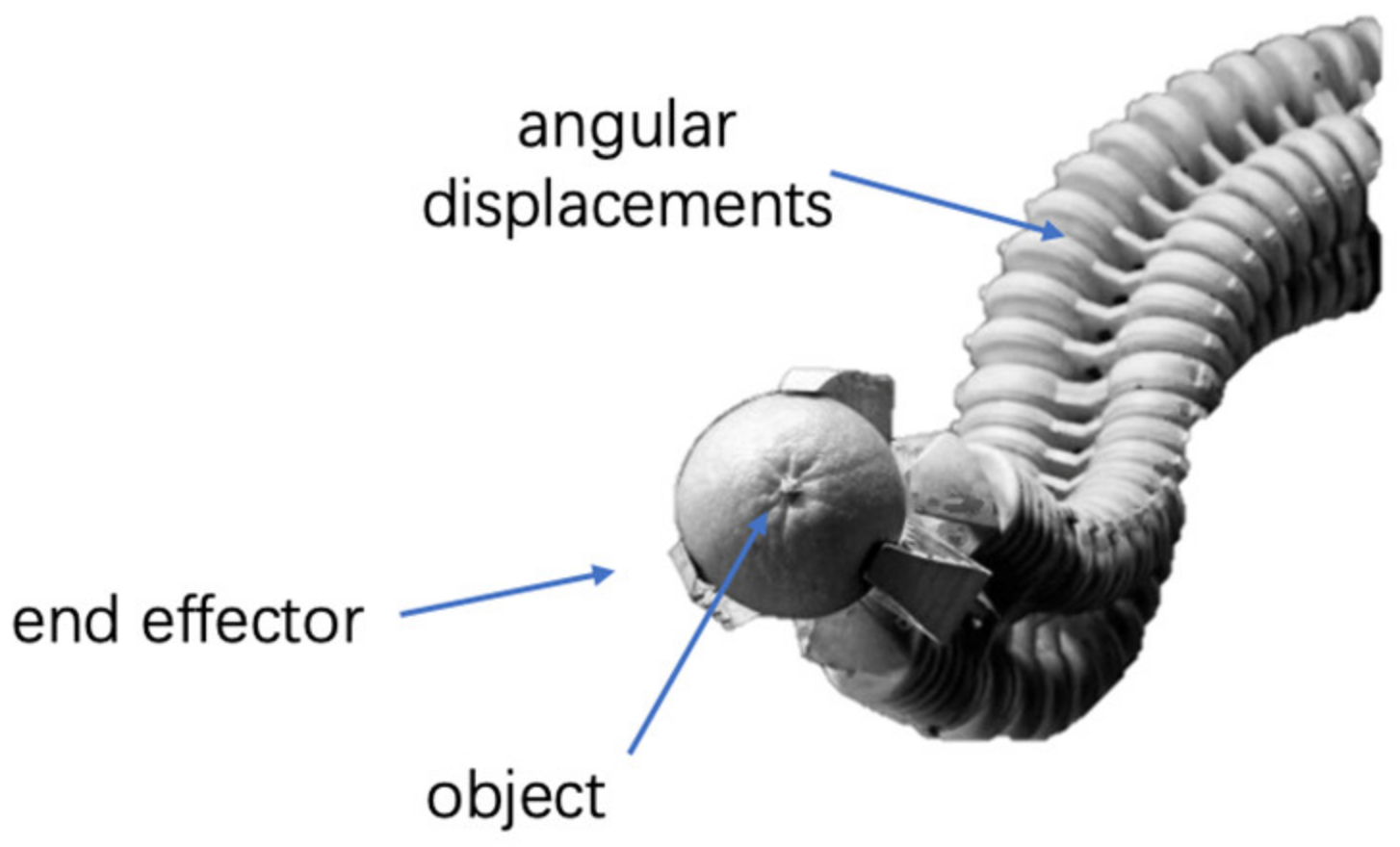
Figure 6.
BionicMotionRobot (2017) [87].
Figure 6.
BionicMotionRobot (2017) [87].
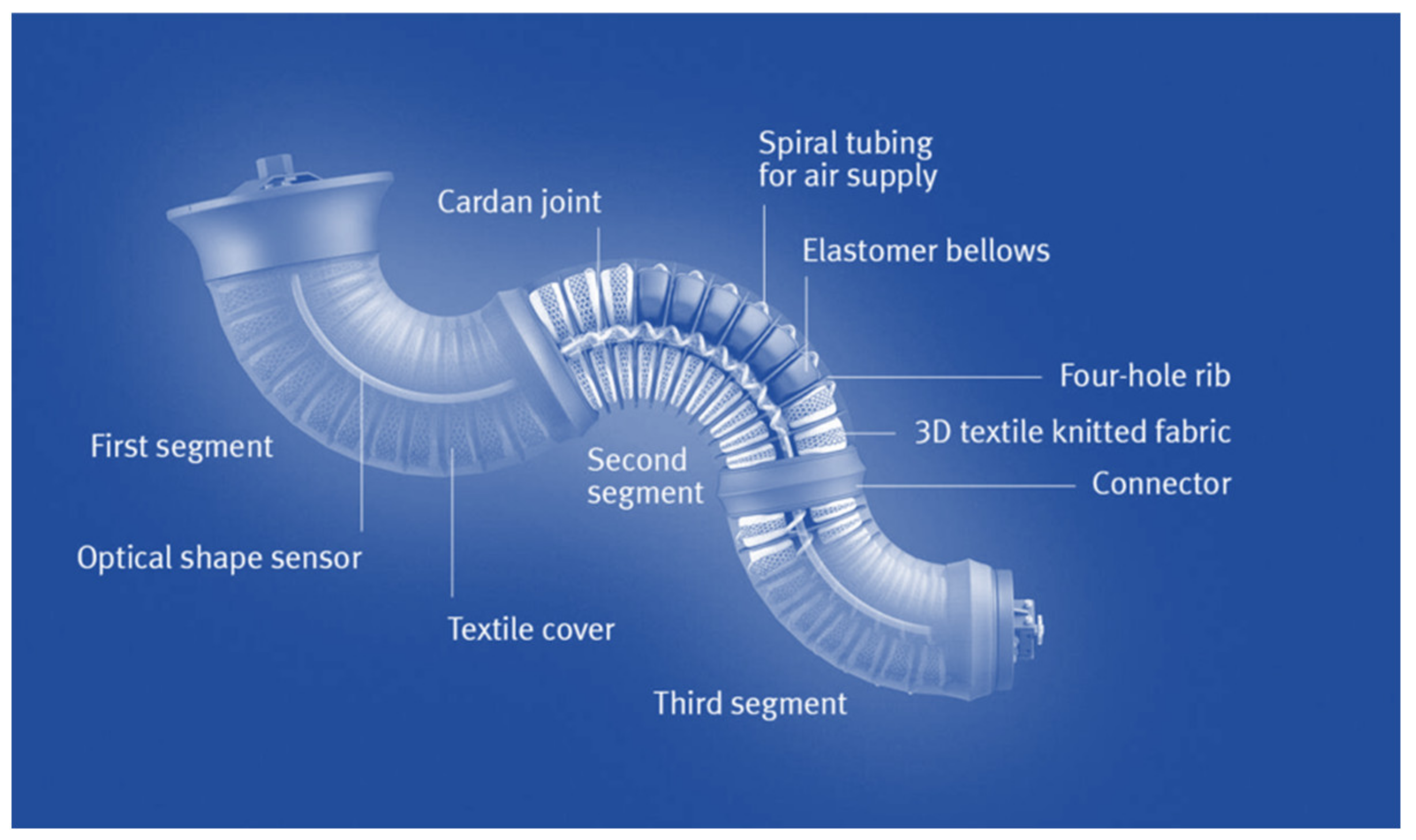
Figure 7.
BionicSoftArm (2019) [88].
Figure 7.
BionicSoftArm (2019) [88].

Figure 8.
Soft Robotic Glove for rehabilitation.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Su, H.; Hou, X.; Zhang, X.; Qi, W.; Cai, S.; Xiong, X.; Guo, J. Pneumatic Soft Robots: Challenges and Benefits. Actuators 2022, 11, 92. https://doi.org/10.3390/act11030092
AMA Style
Su H, Hou X, Zhang X, Qi W, Cai S, Xiong X, Guo J. Pneumatic Soft Robots: Challenges and Benefits. Actuators. 2022; 11(3):92. https://doi.org/10.3390/act11030092
Chicago/Turabian StyleSu, Hang, Xu Hou, Xin Zhang, Wen Qi, Shuting Cai, Xiaoming Xiong, and Jing Guo. 2022. "Pneumatic Soft Robots: Challenges and Benefits" Actuators 11, no. 3: 92. https://doi.org/10.3390/act11030092
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.