
Adaptive Synergetic Motion Control for Wearable Knee-Assistive System: A Rehabilitation of Disabled Patients

 ,
, 

Abstract
:1. Introduction
- ❑
- Establishing an extended system of differential equations (DEs). These DEs reflect various operations such as coordinate observation, optimization, disturbance suppression, etc.
- ❑
- Reducing the extra degrees of freedom (DOF) of extended system w.r.t final manifold by synthesizing an “external” control. The motion can be described by the “internal” dynamics equations of the system.
- ❑
- Developing the “internal” controls, which are responsible for establishing links between the “internal” coordinates of the system such as to satisfy the control objective.
- ❑
- Design of a synergetic control law for a knee-assistive system based on the synergetic control methodology.
- ❑
- Design of adaptive laws for an adaptive synergetic controller for a knee-assistive system based on Lyapunov stability analysis, to deal with uncertainties in the system.
- ❑
- Conduction stability analysis to ensure a stable system and to guarantee the ultimate boundedness of estimated gains.
- ❑
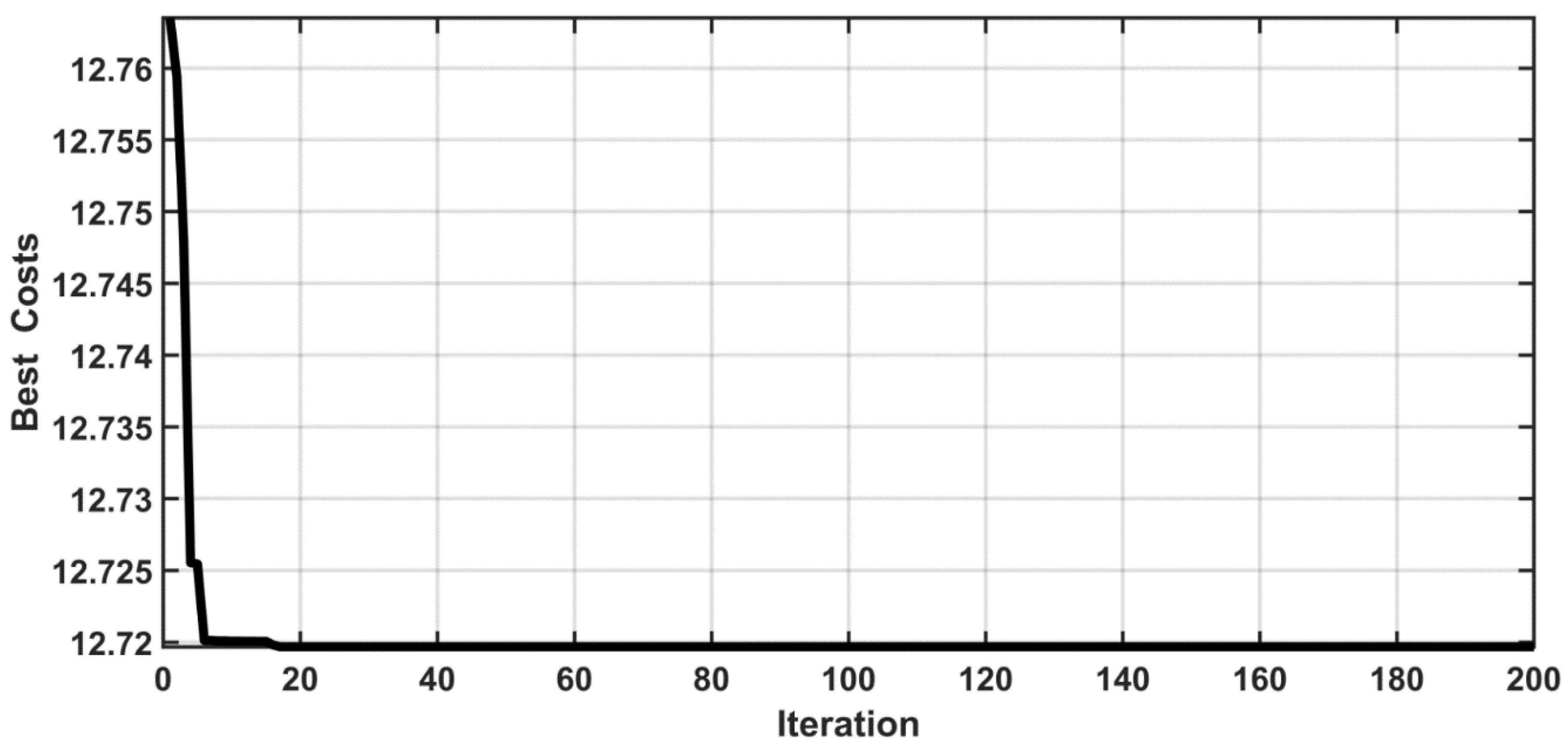
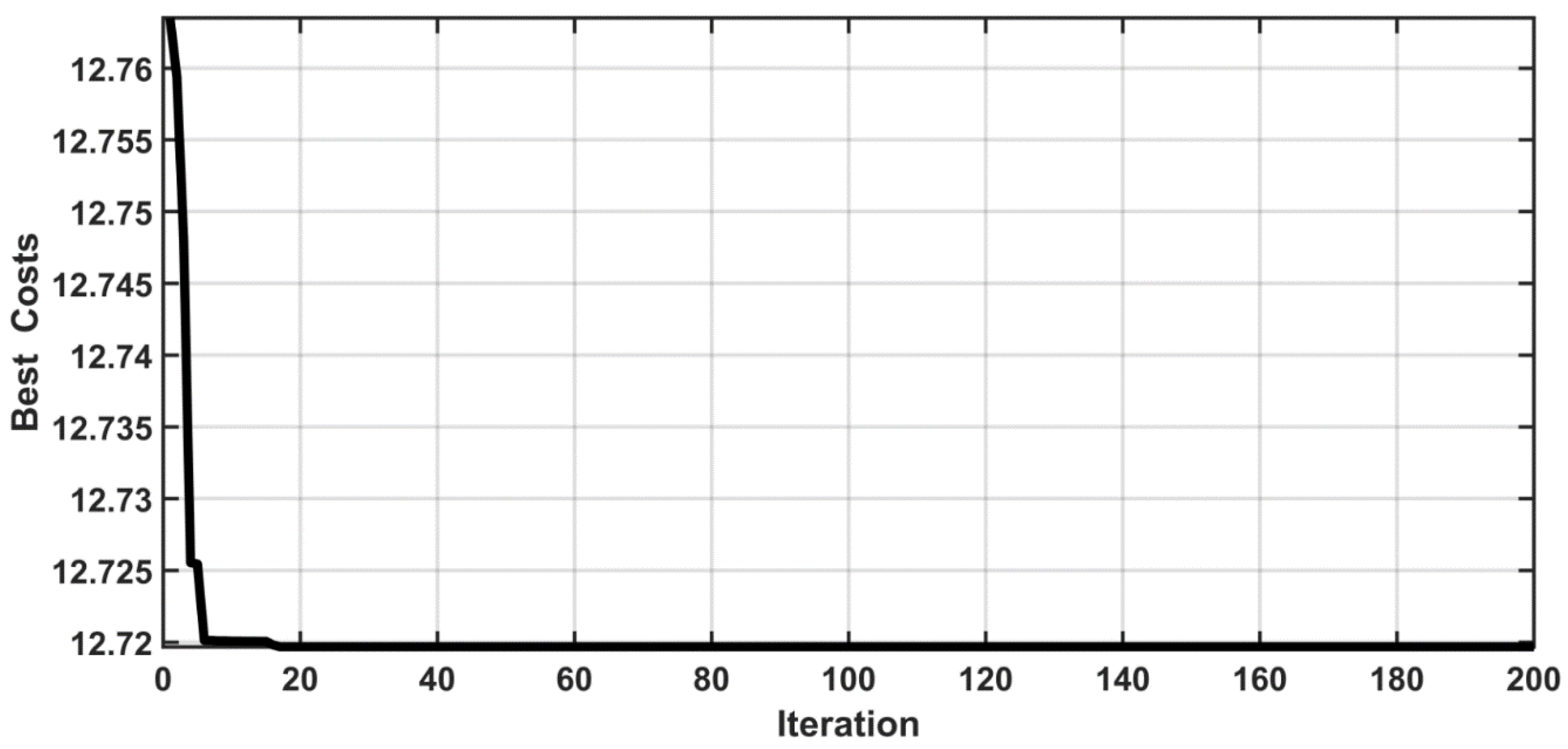
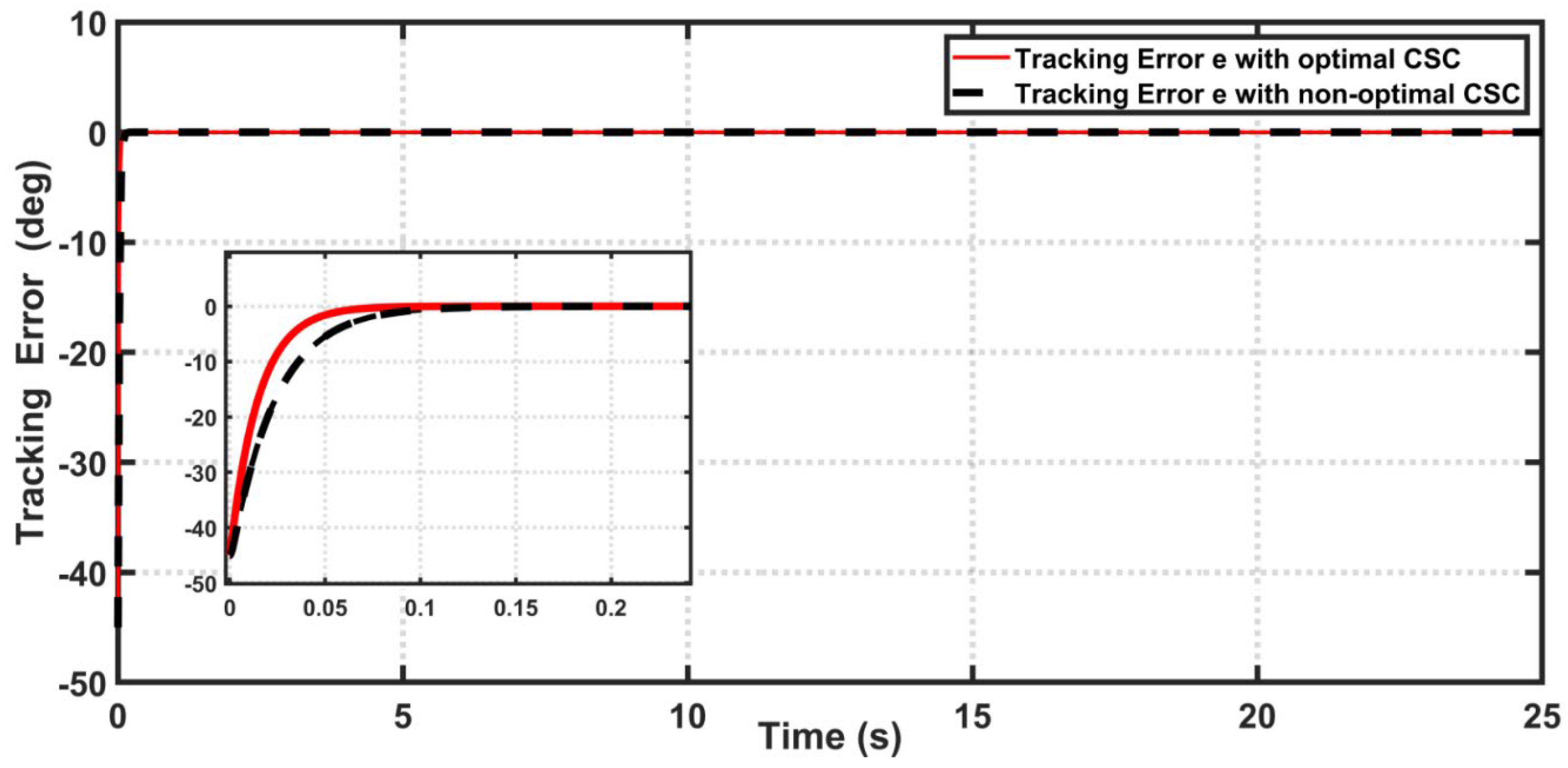
- Design of an optimization algorithm to tune the design parameters of both classical and adaptive synergetic controllers.
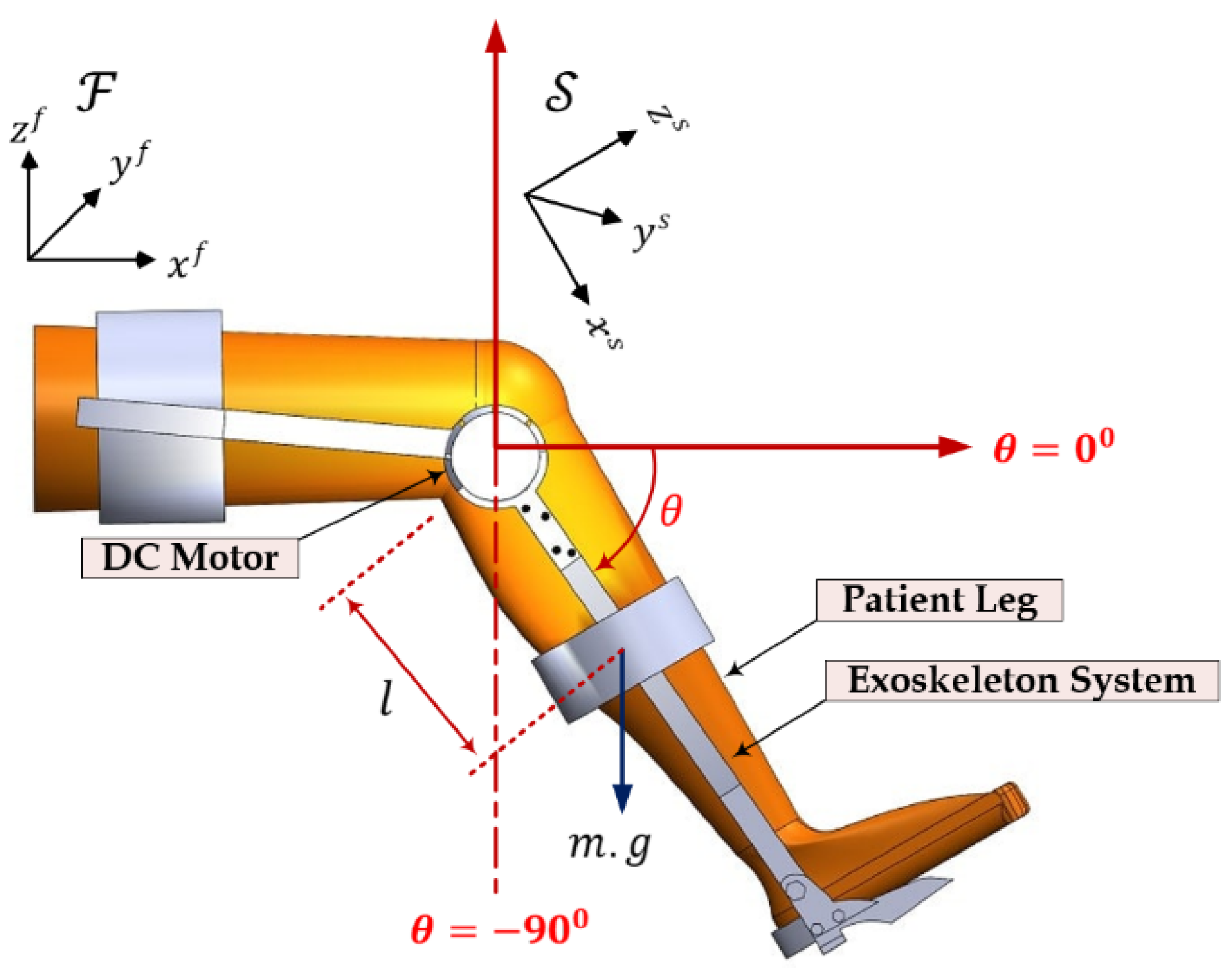
2. Modeling of Exoskeleton Knee-Assistive System
3. Classical and Adaptive Control Design for Knee-Assistive System
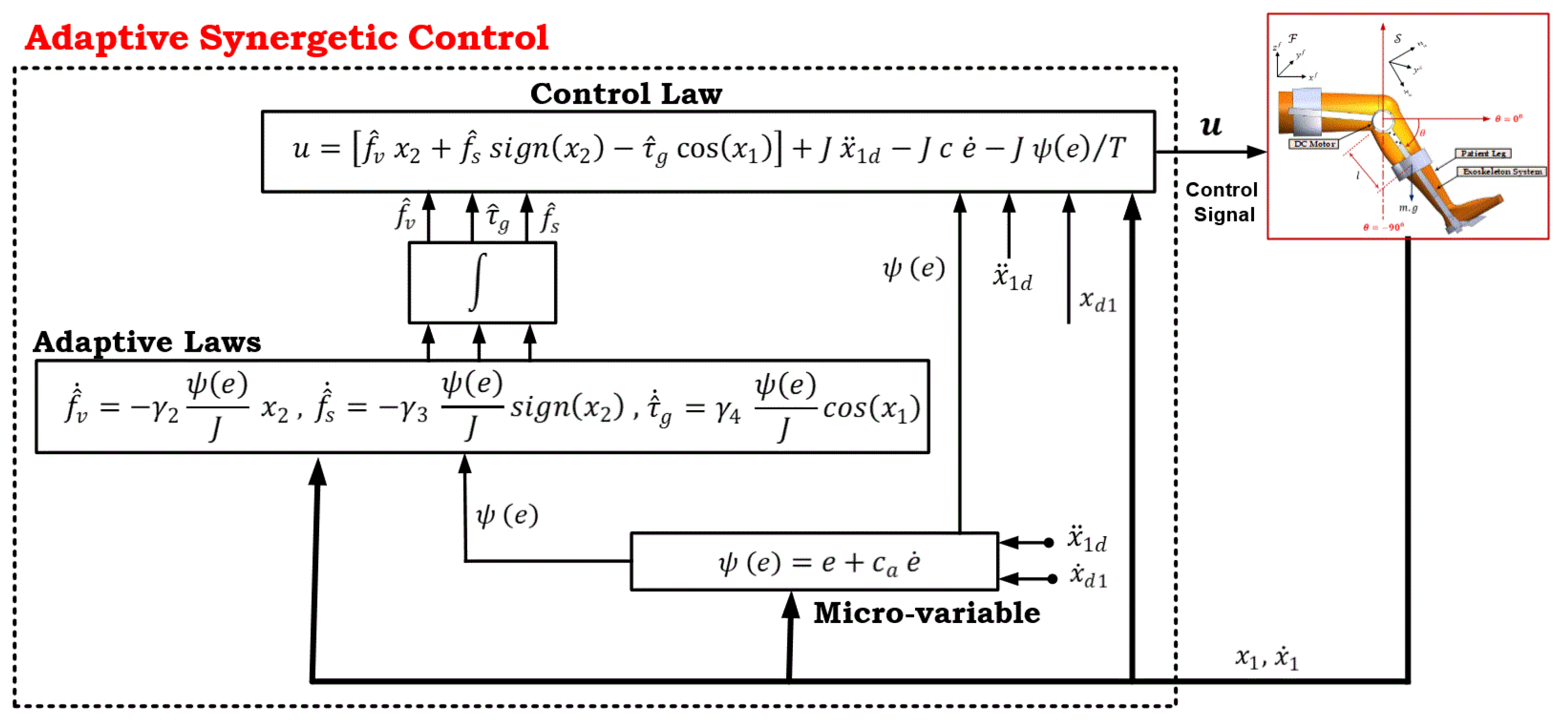
3.1. Synergetic Control Design for Knee-Assistive System
3.2. Design of ABSMC for Knee Exoskeleton System
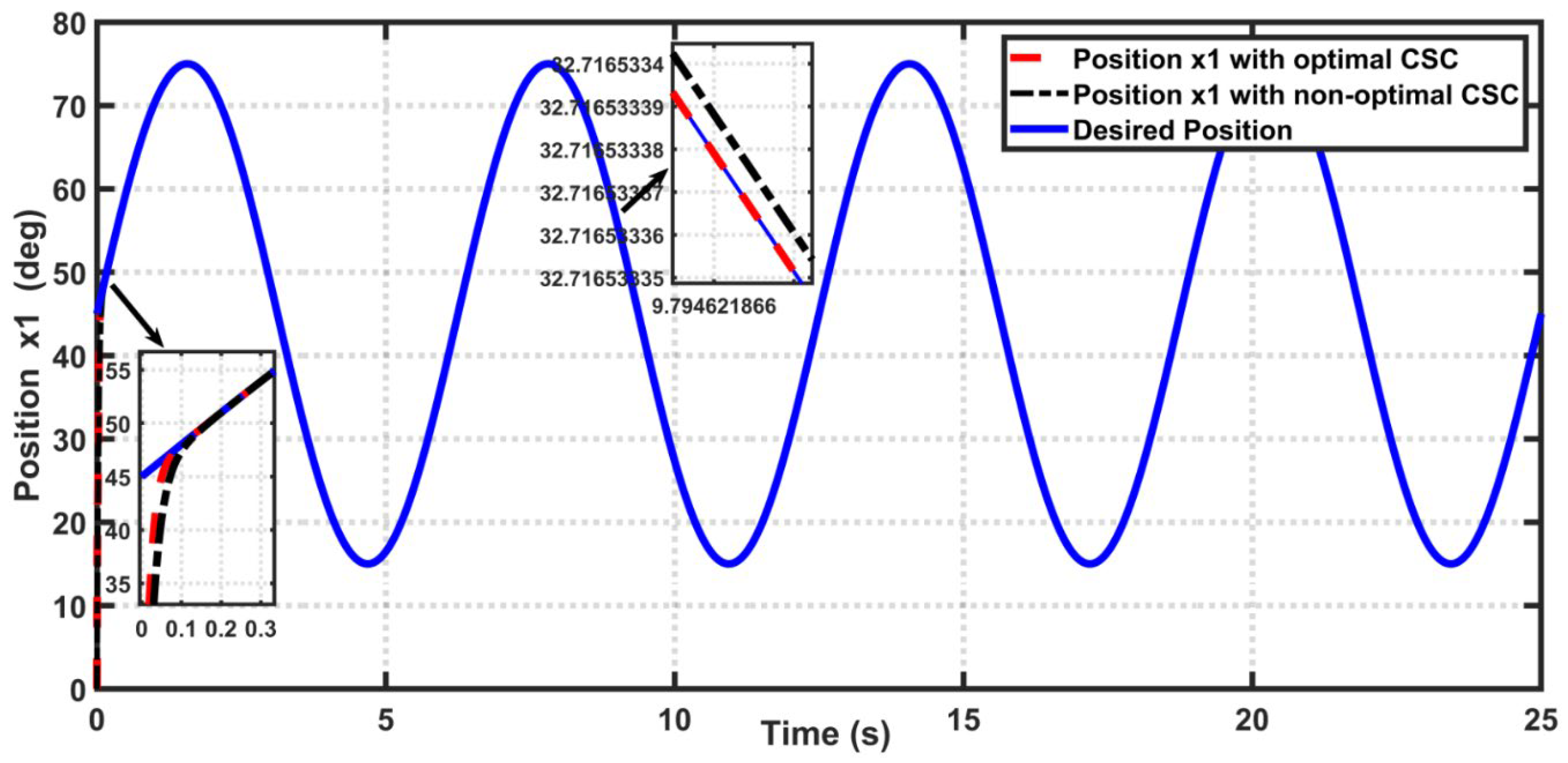
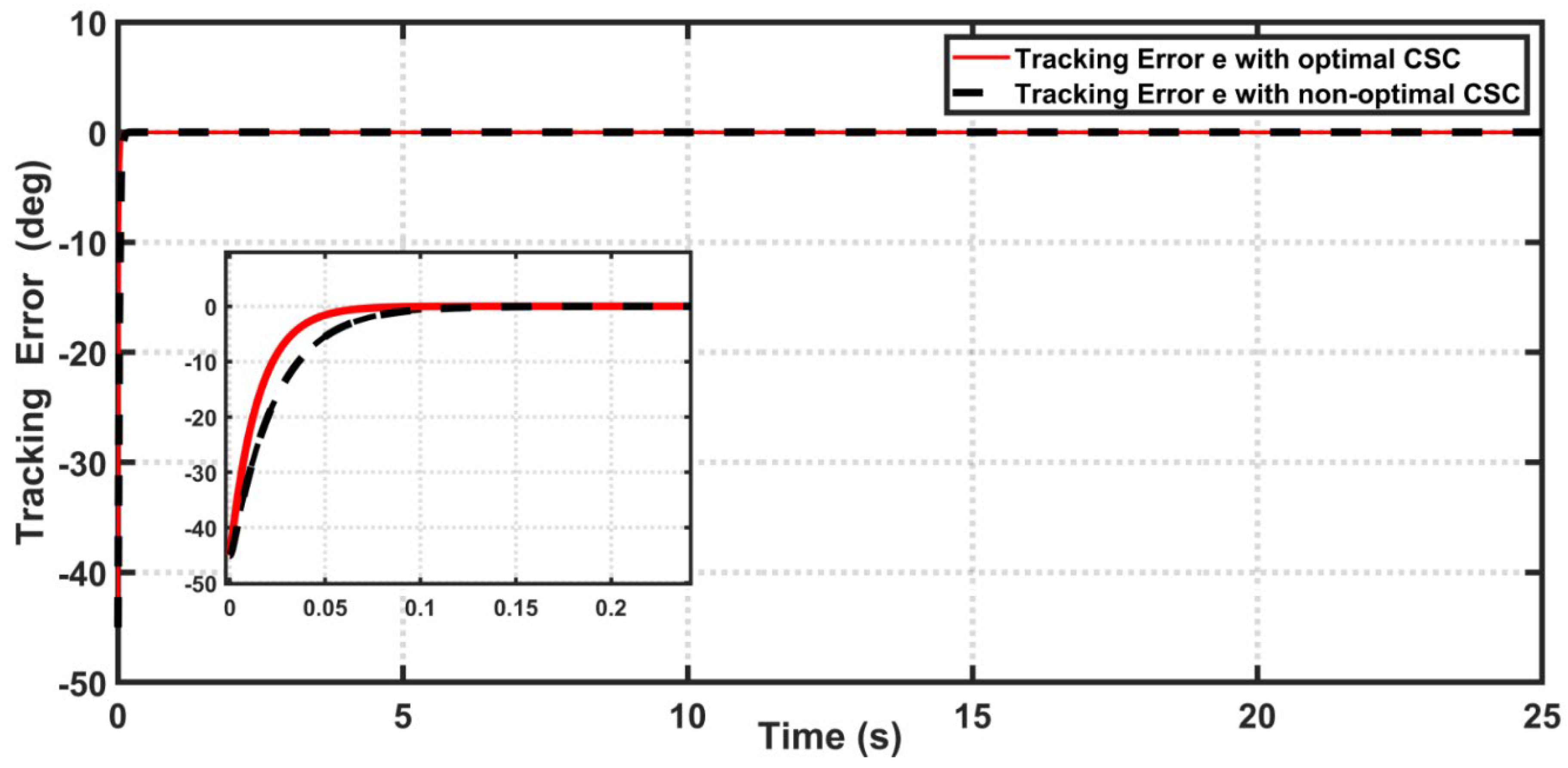
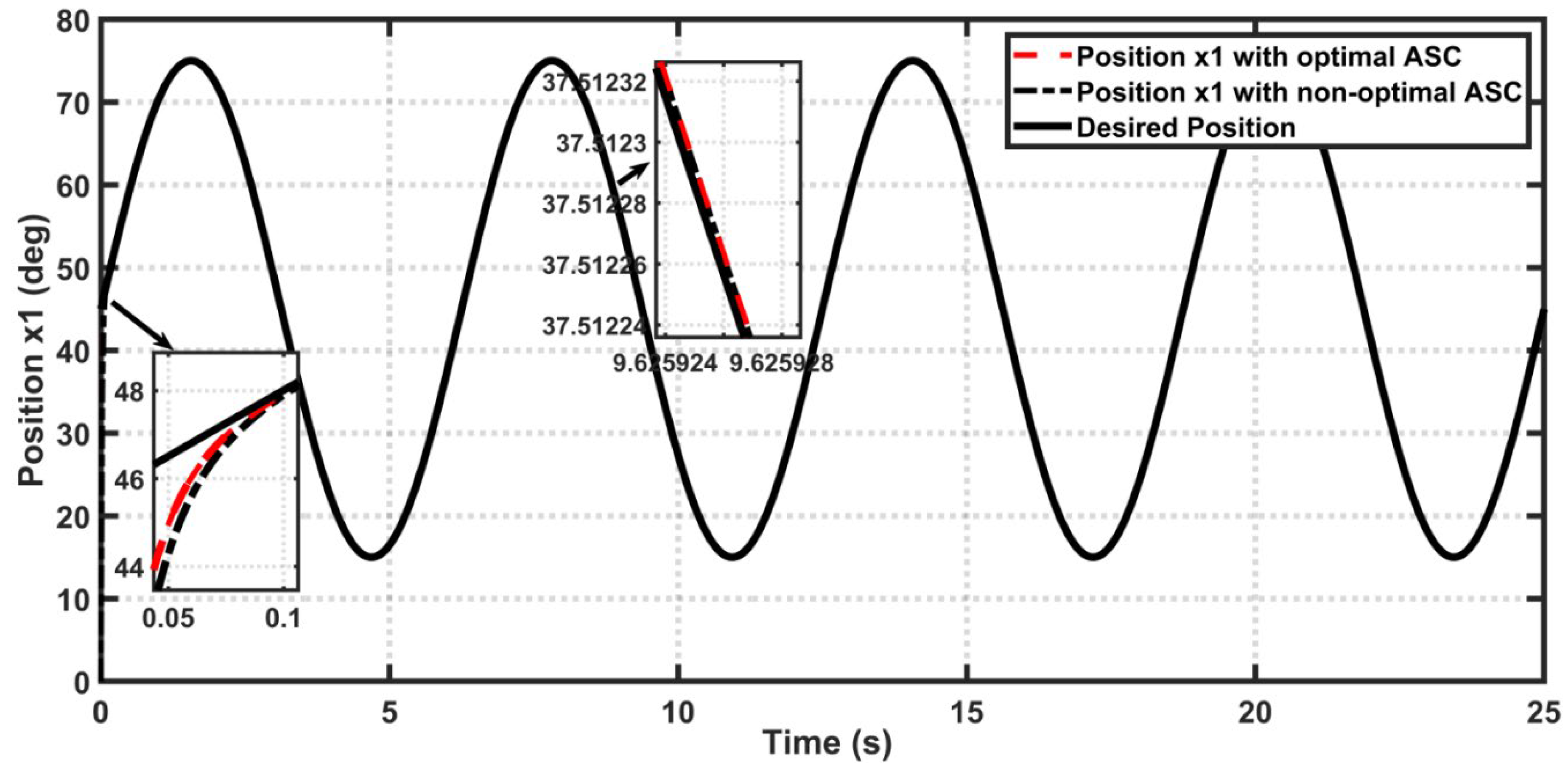
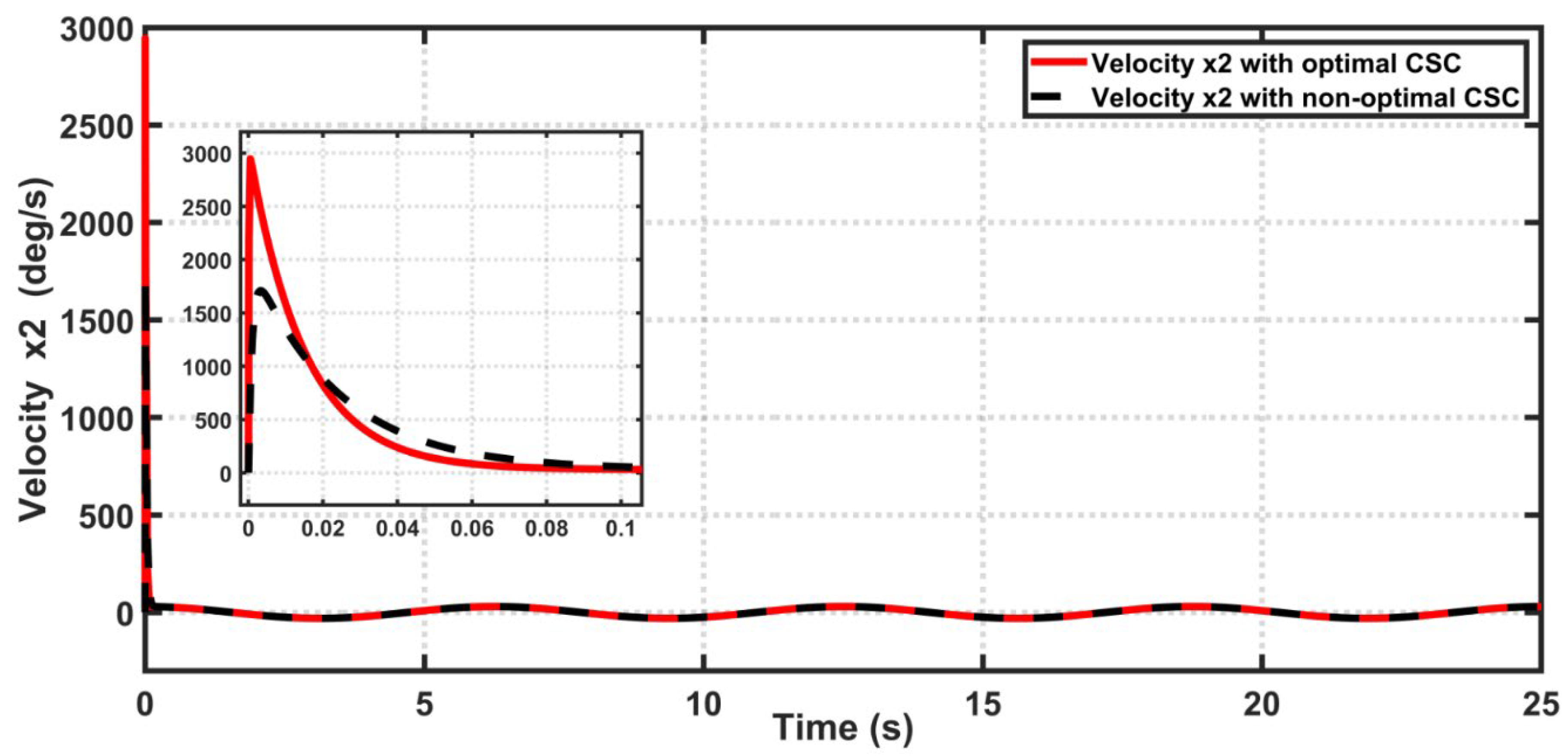
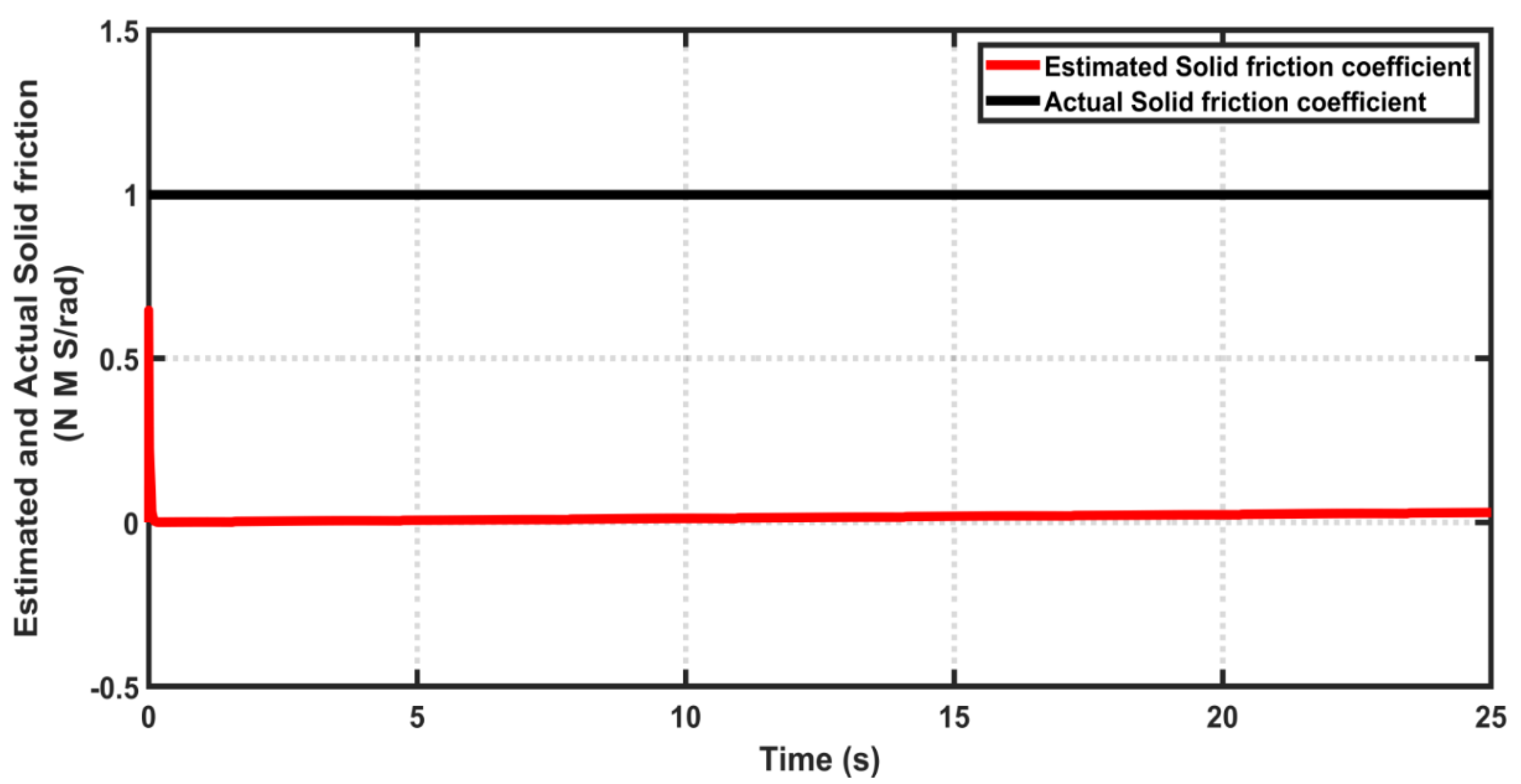
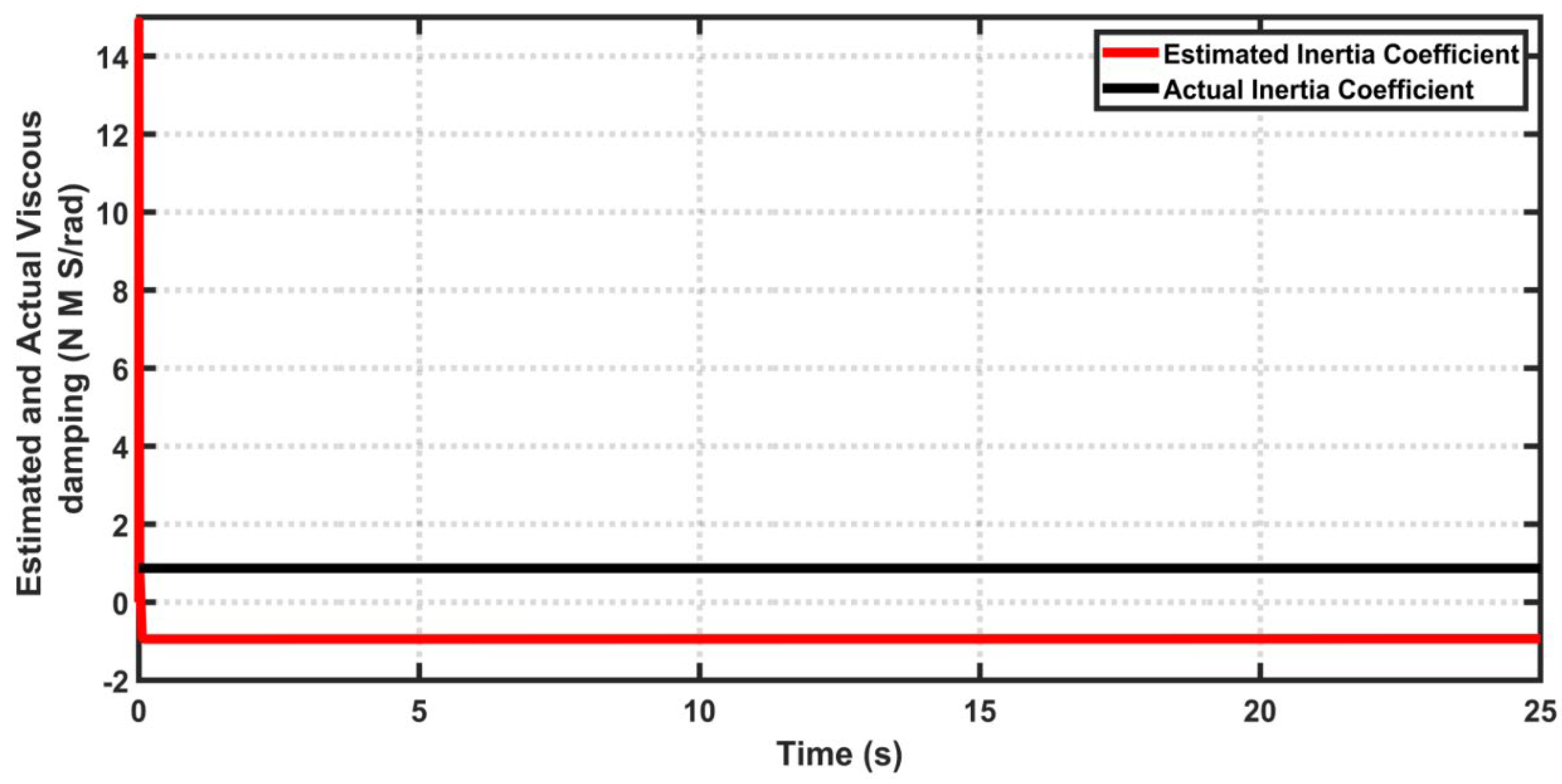
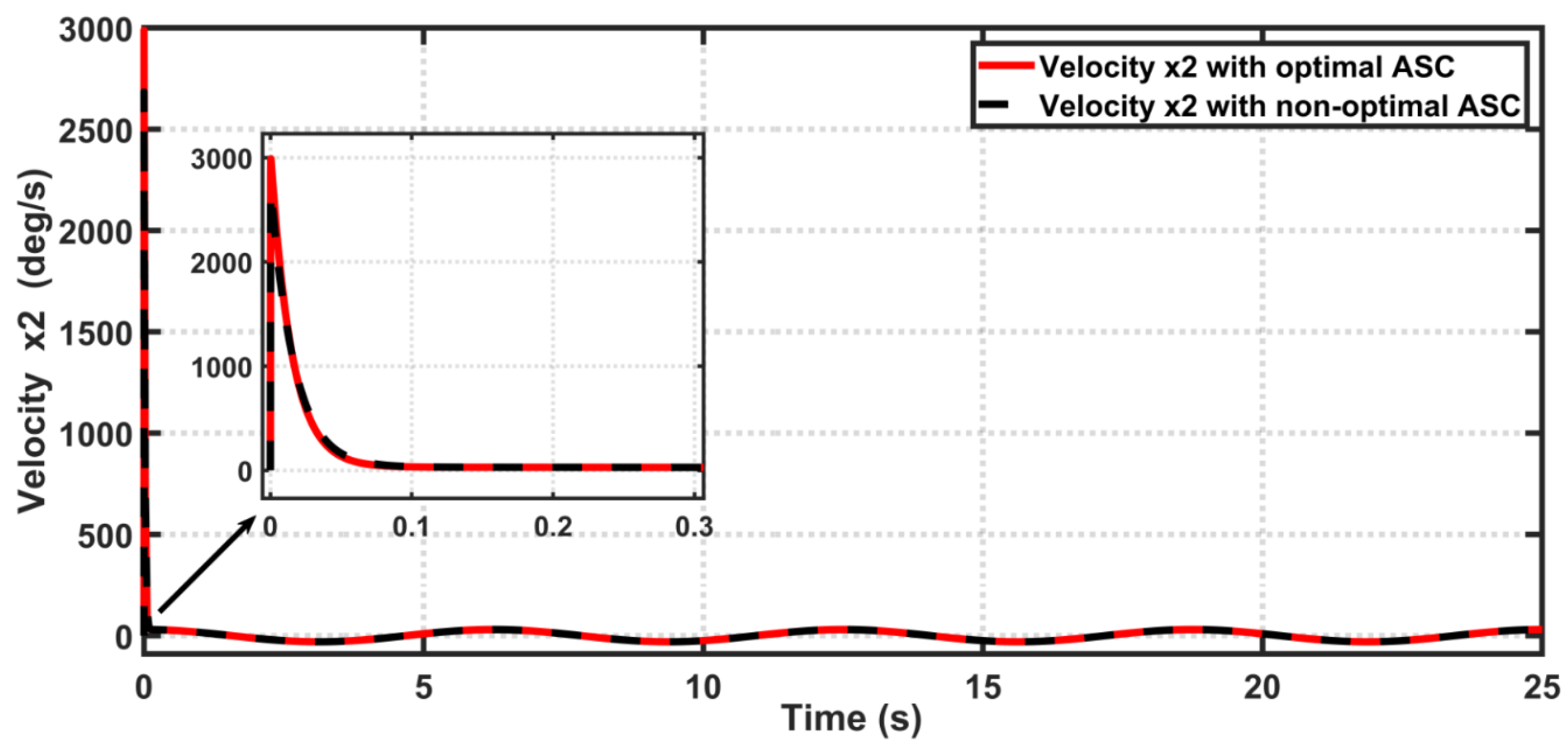
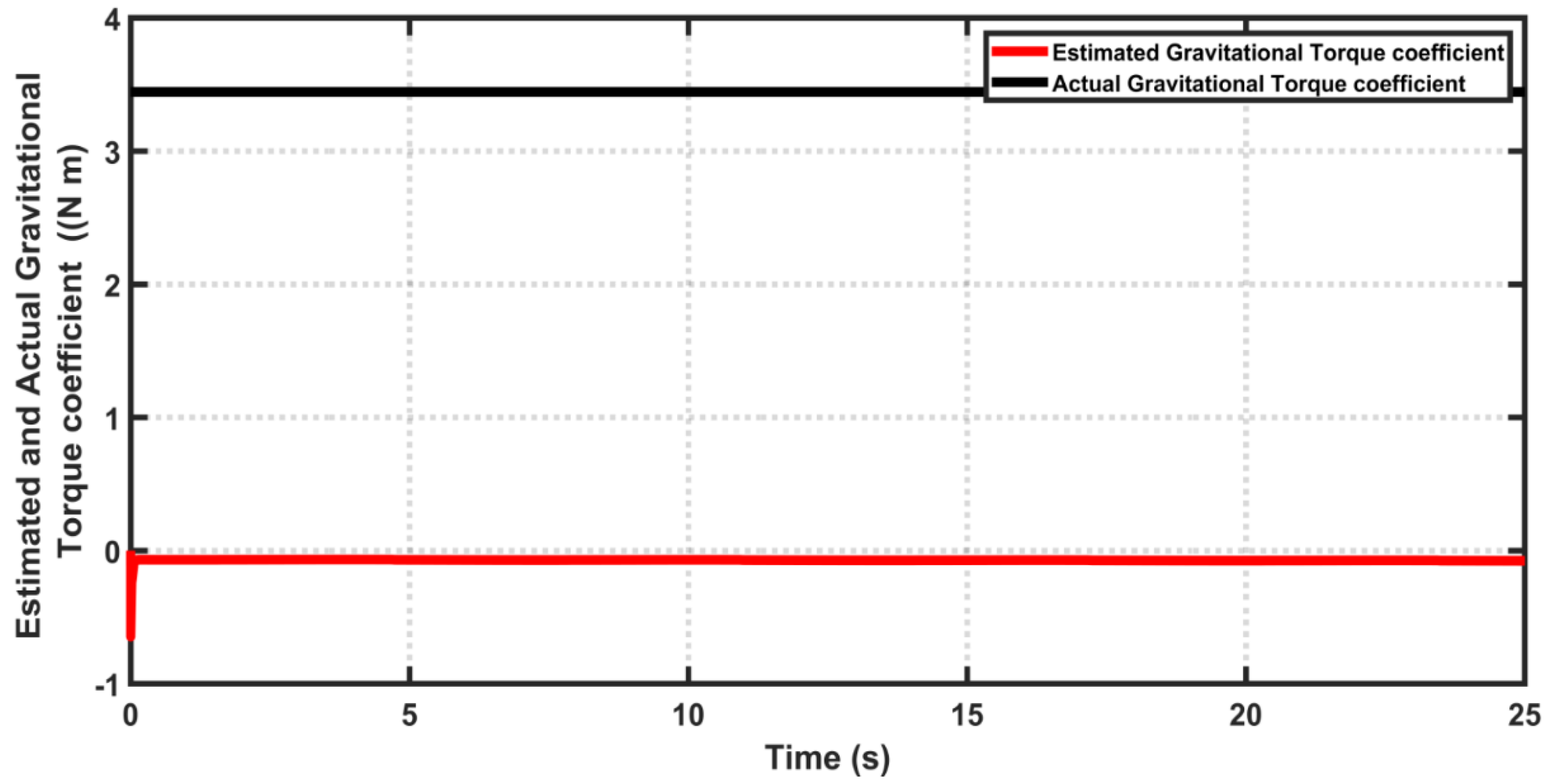
4. Results and Discussion
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nasser, A.R.; Hasan, A.M.; Humaidi, A.J.; Alkhayyat, A.; Alzubaidi, L.; Fadhel, M.A.; Santamaría, J.; Duan, Y. IoT and Cloud Computing in Health-Care: A New Wearable Device and Cloud-Based Deep Learning Algorithm for Monitoring of Diabetes. Electronics 2021, 10, 2719. [Google Scholar] [CrossRef]
- Ergin, M.A.; Patoglu, V. A self-adjusting knee exoskeleton for robot assisted treatment of knee injuries. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4917–4922. [Google Scholar]
- Veerbeek, J.M.; Langbroek-Amersfoort, A.C.; Van Wegen, E.E.; Meskers, C.G.; Kwakkel, G. Effects of Robot-Assisted Therapy for the Upper Limb After Stroke. Neurorehabil. Neural Repair. 2017, 31, 107–121. [Google Scholar] [CrossRef] [PubMed]
- Rifaï, H.; Mohammed, S.; Daachi, B.; Amirat, Y. Adaptive control of a human-driven knee joint orthosis. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2486–2491. [Google Scholar]
- Sherwani, K.I.K.; Kumar, N.; Chemori, A.; Khan, M.; Mohammed, S. RISE-based adaptive control for EICoSI exoskeleton to assist knee joint mobility. Robot. Auton. Syst. 2019, 124, 103354. [Google Scholar] [CrossRef] [Green Version]
- Raheema, M.N.; Kadhim, D.A.; Hussein, J.S. Design an intelligent hybrid position/force control for above knee prosthesis based on adaptive neuro-fuzzy inference system. Indones. J. Electr. Eng. Comput. Sci. 2021, 23, 675–685. [Google Scholar] [CrossRef]
- Ding, G.; Huo, W.; Huang, J.; Amirat, Y.; Mohammed, S. Robust and Safe Control of a Knee Joint Orthosis. In Proceedings of the IEEE International Conference on Intelligence and Safety for Robotics (ISR), Shenyang, China, 24–27 August 2018; pp. 343–348. [Google Scholar]
- Mefoued, S.; Mohammed, S.; Amirat, Y. Knee joint movement assistance through robust control of an actuated orthosis. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1749–1754. [Google Scholar]
- Zhao, W.; Song, A. Active motion control of a knee exoskeleton driven by antagonistic pneumatic muscle actuators. Actuators 2020, 9, 134. [Google Scholar] [CrossRef]
- Ajayi, M.O.; Djouani, K.; Hamam, Y. Bounded Control of an Actuated Lower-Limb Exoskeleton. J. Robot. 2017, 2017, 2423643. [Google Scholar] [CrossRef] [Green Version]
- Aguilar-Sierra, H.; Yu, W.; Salazar, S.; Lopez, R. Design and control of hybrid actuation lower limb exoskeleton. Adv. Mech. Eng. 2015, 7, 1687814015590988. [Google Scholar] [CrossRef]
- Lee, T.; Lee, D.; Song, B.; Baek, Y.S. Design and Control of a Polycentric Knee Exoskeleton Using an Electro-Hydraulic Actuator. Sensors 2020, 20, 211. [Google Scholar] [CrossRef] [Green Version]
- Rifaï, H.; Ben Abdessalem, M.S.; Chemori, A.; Mohammed, S.; Amirat, Y. Augmented L1 adaptive control of an actuated knee joint exoskeleton: From design to real-time experiments. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5708–5714. [Google Scholar]
- Mefoued, S.; Belkhiat, D.E.C. A Robust Control Scheme Based on Sliding Mode Observer to Drive a Knee-Exoskeleton. Asian J. Control 2019, 21, 439–455. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Du, Z.; He, L.; Wang, J.; Wu, D.; Dong, W. Active Disturbance Rejection with Fast Terminal Sliding Mode Control for a Lower Limb Exoskeleton in Swing Phase. IEEE Access 2019, 7, 72343–72357. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Chen, L.; Guo, S. Observer-based finite-time control for trajectory tracking of lower extremity exoskeleton. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 236, 257–269. [Google Scholar] [CrossRef]
- Chevalier, A.; Ionescu, C.M.; Keyser, R.D. Analysis of robustness to gain variation in a fractional-order PI controller for knee joint motion. In Proceedings of the ICFDA’14 International Conference on Fractional Differentiation and Its Applications 2014, Catania, Italy, 23–25 June 2014; pp. 1–6. [Google Scholar]
- Kaur, S.; Sagar, S.; Sondhi, S. Internal model control based fractional order PID controller for knee joint motion. In Proceedings of the 11th International Conference on Industrial and Information Systems (ICIIS), Roorkee, India, 3–4 December 2016; pp. 318–322. [Google Scholar]
- Mefoued, S.; Mohammed, S.; Amirat, Y. Toward Movement Restoration of Knee Joint Using Robust Control of Powered Orthosis. IEEE Trans. Control Syst. Technol. 2013, 21, 2156–2168. [Google Scholar] [CrossRef]
- Mefoued, S. A robust adaptive neural control scheme to drive an actuated orthosis for assistance of knee movements. Neurocomputing 2014, 140, 27–40. [Google Scholar] [CrossRef]
- Wang, T.K.; Ju, M.S.; Tsuei, Y.G. Adaptive Control of Above Knee Electro-Hydraulic Prosthesis. J. Biomech. Eng. 1992, 114, 421–424. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Li, W.; Wang, J.; Yang, P. Model-free control method for estimating the joint angles of the knee exoskeleton. Adv. Mech. Eng. 2018, 10, 1687814018807768. [Google Scholar] [CrossRef] [Green Version]
- Guan, W.; Zhou, L.; Cao, Y. Joint Motion Control for Lower Limb Rehabilitation Based on Iterative Learning Control (ILC) Algorithm. Complexity 2021, 2021, 1–9. [Google Scholar] [CrossRef]
- Aljuboury, A.S.; Hameed, A.H.; Ajel, A.R.; Humaidi, A.J.; Alkhayyat, A.; Mhdawi, A.K.A. Robust adaptive control of knee exoskeleton-assistant system based on nonlinear disturbance observer. Actuators 2022, 11, 78. [Google Scholar] [CrossRef]
- Aole, S.; Elamvazuthi, I.; Waghmare, L.; Patre, B.; Meriaudeau, F. Improved active disturbance rejection control for trajectory tracking control of lower limb robotic rehabilitation exoskeleton. Sensors 2020, 20, 3681. [Google Scholar] [CrossRef]
- Zhan, L.; Wenhao, M.; Ziguang, Y.; Hongliang, G. Tracking control of time-varying knee exoskeleton disturbed by interaction torque. ISA Trans. 2017, 71, 458–466. [Google Scholar]
- Shepherd, M.K.; Rouse, E.J. Design and Validation of a Torque-Controllable Knee Exoskeleton for Sit-to-Stand Assistance. IEEE/ASME Trans. Mechatron. 2017, 22, 1695–1704. [Google Scholar] [CrossRef]
- Lyu, M.; Chen, W.-H.; Ding, X.; Wang, J.; Pei, Z.; Zhang, B. Development of an EMG-Controlled Knee Exoskeleton to Assist Home Rehabilitation in a Game Context. Front. Neurorobot. 2019, 13, 67. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qian, J.; Li, K.; Wu, H.; Yang, J.; Li, X. Synergetic Control of Grid-Connected Photovoltaic Systems. Int. J. Photoenergy 2017, 2017, 5051489. [Google Scholar] [CrossRef]
- Yang, X.; Jiah, Y. Adaptive Synergetic Control about Attitude Tracking of Rigid Spacecraft with Disturbances and Parameter Uncertainties. In Proceedings of the 15th International Conference on Control, Automation and Systems (ICCAS 2015), Busan, Korea, 13–16 October 2015; pp. 13–16. [Google Scholar]
- Humaidi, A.J.; Ibraheem, I.K.; Azar, A.T.; Sadiq, M.E. A New Adaptive Synergetic Control Design for Single Link Robot Arm Actuated by Pneumatic Muscles. Entropy 2020, 22, 723. [Google Scholar] [CrossRef] [PubMed]
- Humaidi, A.J.; Hameed, M. Development of a New Adaptive Backstepping Control Design for a Non-Strict and Under-Actuated System Based on a PSO Tuner. Information 2019, 10, 38. [Google Scholar] [CrossRef] [Green Version]
- Humaidi, A.J.; Kadhim, S.K.; Gata, A. Optimal Adaptive Magnetic Suspension Control of Rotary Impeller for Artificial Heart Pump. Cybern. Syst. 2022, 53, 141–167. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Badr, H.M. Linear and Nonlinear Active Disturbance Rejection Controllers for Single-Link Flexible Joint Robot Manipulator based on PSO Tuner. J. Eng. Sci. Technol. Rev. 2018, 11, 133–138. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Kadhim, S.K.; Gataa, A.S. Development of a Novel Optimal Backstepping Control Algorithm of Magnetic Impeller-Bearing System for Artificial Heart Ventricle Pump. Cybern. Syst. 2020, 51, 521–541. [Google Scholar] [CrossRef]
- Alawad, N.A.; Humaidi, A.J.; Al-Araji, A.S. Improved Active Disturbance Rejection Control for the Knee Joint Motion Model. Math. Model. Eng. Probl. 2022, 9, 477–483. [Google Scholar] [CrossRef]
- Moezi, S.A.; Zakeri, E.; Zare, A. A generally modified cuckoo optimization algorithm for crack detection in cantilever Euler-Bernoulli beams. Precis. Eng. 2018, 52, 227–241. [Google Scholar] [CrossRef]
- Tang, R.; Fong, S.; Dey, N.; Wong, R.K.; Mohammed, S. Cross Entropy Method Based Hybridization of Dynamic Group Optimization Algorithm. Entropy 2017, 19, 533. [Google Scholar] [CrossRef] [Green Version]
- Al-Azza, A.A.; Al-Jodah, A.A.; Harackiewicz, F.J. Spider monkey optimization: A novel technique for antenna optimization. IEEE Antennas Wirel. Propag. Lett. 2015, 15, 1016–1019. [Google Scholar] [CrossRef]
- Al-Qassar, A.A.; Al-Obaidi, A.S.; Hasan, A.F.; Humaidi, A.J.; Nasser, A.R.; Alkhayyat, A.; Ibraheem, K.I. Finite-Time Control of Wing-Rock Motion for Delta Wing Aircraft Based on Whale-Optimization Algorithm. Indones. J. Sci. Technol. 2021, 6, 441–456. [Google Scholar] [CrossRef]
- Gao, Z.-M.; Zhao, J. An Improved Grey Wolf Optimization Algorithm with Variable Weights. Comput. Intell. Neurosci. 2019, 2019, 2981282. [Google Scholar] [CrossRef] [PubMed]
- Al-Qassar, A.A.; Abdu-Alkareem, A.I.; Hasan, A.F.; Humaidi, A.J.; Ibraheem, K.I.; Azar, A.T.; Hameed, A.H. Grey-Wolf Optimization Better Enhances the Dynamic Performance of Roll Motion for Tail-Sitter VTOL Aircraft Guided and Controlled by STSMC. J. Eng. Sci. Technol. 2021, 16, 1932–1950. [Google Scholar]
- Humaidi, A.J.; Najem, H.T.; Al-Dujaili, A.Q.; Pereira, D.A.; Ibraheem, I.K.; Azar, A.T. Social spider optimization algorithm for tuning parameters in PD-like interval type-2 fuzzy logic controller applied to a parallel robot. Meas. Control 2021, 54, 303–323. [Google Scholar] [CrossRef]
- Nasiri, J.; Khiyabani, F.M. A whale optimization algorithm (WOA) approach for clustering. Cogent Math. Stat. 2018, 5, 1483565. [Google Scholar] [CrossRef]
- Mirjalili, S. A Sine Cosine Algorithm for solving optimization problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Kasim, M.Q.; Hassan, R.F.; Humaidi, A.J.; Abdulkareem, A.I.; Nasser, A.R.; Alkhayyat, A. Control Algorithm of Five-Level Asymmetric Stacked Converter Based on Xilinx System Generator. In Proceedings of the IEEE 9th Conference on Systems, Process and Control (ICSPC 2021), Malacca, Malaysia, 10–11 December 2021; pp. 174–179. [Google Scholar]
- Hameed, A.H.; Al-Dujaili, A.Q.; Humaidi, A.J.; Hussein, H.A. Design of terminal sliding position control for electronic throttle valve system: A performance comparative study. Int. Rev. Autom. Control 2019, 12, 251–260. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Hameed, A.H. Design and comparative study of advanced adaptive control schemes for position control of electronic throttle valve. Information 2019, 10, 65. [Google Scholar] [CrossRef] [Green Version]
- Humaidi, A.J.; Hameed, M.R. Design and performance investigation of block-backstepping algorithms for ball and arc system. In Proceedings of the 2017 IEEE International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), Chennai, India, 21–22 September 2017; pp. 325–332. [Google Scholar]
- Berbek, M.I.; Oglah, A.A. Adaptive neuro-fuzzy controller trained by genetic-particle swarm for active queue management in internet congestion. Indones. J. Electr. Eng. Comput. Sci. 2022, 26, 229–242. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient Description | Value |
|---|---|
| Moment of inertia of leg–exoskeleton system | |
| Viscosity damping coefficient of the knee and the exoskeleton | |
| Solid friction coefficient of the knee and the exoskeleton | |
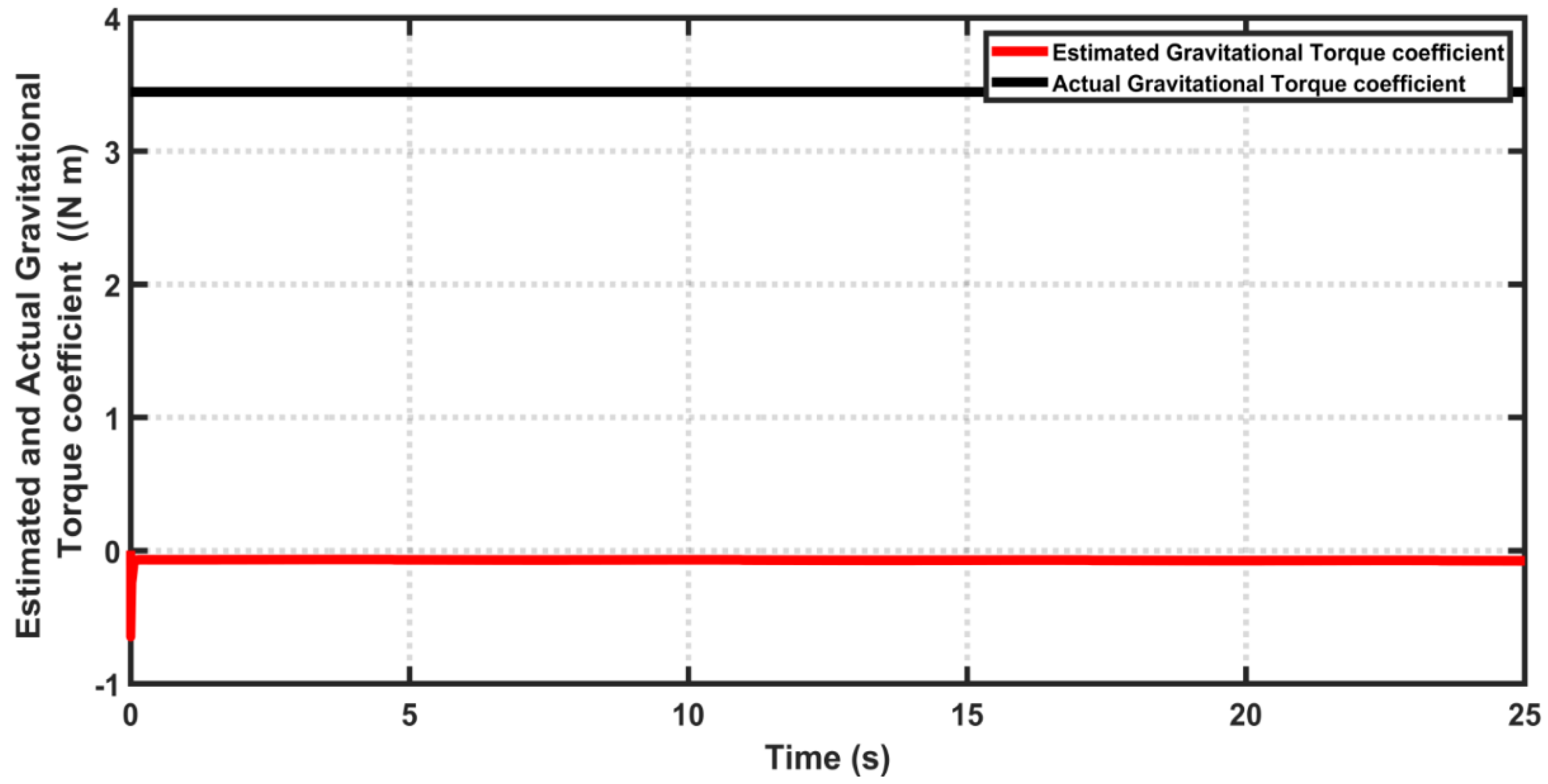
| Gravitation torque of the system |
| Controller | Design Parameters | Setting Type of Design Parameters | |
|---|---|---|---|
| PSO Algorithm | Trial-and-Error Technique | ||
| CSC | |||
| ASC | 34.910 | ||
| 1.034 | 0.523 | ||
| 6.124 | 3.012 | ||
| 2.037 | 4.981 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahdi, S.M.; Yousif, N.Q.; Oglah, A.A.; Sadiq, M.E.; Humaidi, A.J.; Azar, A.T. Adaptive Synergetic Motion Control for Wearable Knee-Assistive System: A Rehabilitation of Disabled Patients. Actuators 2022, 11, 176. https://doi.org/10.3390/act11070176
Mahdi SM, Yousif NQ, Oglah AA, Sadiq ME, Humaidi AJ, Azar AT. Adaptive Synergetic Motion Control for Wearable Knee-Assistive System: A Rehabilitation of Disabled Patients. Actuators. 2022; 11(7):176. https://doi.org/10.3390/act11070176
Chicago/Turabian StyleMahdi, Shaymaa M., Noor Q. Yousif, Ahmed A. Oglah, Musaab E. Sadiq, Amjad J. Humaidi, and Ahmad Taher Azar. 2022. "Adaptive Synergetic Motion Control for Wearable Knee-Assistive System: A Rehabilitation of Disabled Patients" Actuators 11, no. 7: 176. https://doi.org/10.3390/act11070176