
Soft Gloves: A Review on Recent Developments in Actuation, Sensing, Control and Applications



Department of Mechanical and Industrial Engineering, University of Brescia, Via Branze, 38, 25123 Brescia, Italy
*
Author to whom correspondence should be addressed.
Actuators 2022, 11(8), 232; https://doi.org/10.3390/act11080232
Submission received: 20 June 2022
/
Revised: 20 July 2022
/
Accepted: 21 July 2022
/
Published: 10 August 2022
(This article belongs to the Special Issue Artificial Muscles for Biorobotics: Study, Application and Future Perspectives)
Abstract
:Interest in soft gloves, both robotic and haptic, has enormously grown over the past decade, due to their inherent compliance, which makes them particularly suitable for direct interaction with the human hand. Robotic soft gloves have been developed for hand rehabilitation, for ADLs assistance, or sometimes for both. Haptic soft gloves may be applied in virtual reality (VR) applications or to give sensory feedback in combination with prostheses or to control robots. This paper presents an updated review of the state of the art of soft gloves, with a particular focus on actuation, sensing, and control, combined with a detailed analysis of the devices according to their application field. The review is organized on two levels: a prospective review allows the highlighting of the main trends in soft gloves development and applications, and an analytical review performs an in-depth analysis of the technical solutions developed and implemented in the revised scientific research. Additional minor evaluations integrate the analysis, such as a synthetic investigation of the main results in the clinical studies and trials referred in literature which involve soft gloves.
1. Introduction
Hands have always been a fundamental interface element between human beings and external physical reality, and today also towards non-physical environments, such as virtual or augmented reality. Soft robotic gloves and soft haptic gloves are wearable devices, which do not impose physical restraints on joint motions, developed to actuate hand movements (this is the case of rehabilitative or assisting gloves) or to sense and/or give the user sensory feedbacks (in the case of haptic gloves). The actuation of hand joints is used in robotic rehabilitative exoskeletons to provide several different kinds of patients, such as subjects affected by rheumatoid arthritis and spinal cord injury or post-stroke patients, with therapeutic exercises at a higher dosage and intensity compared to conventional manual therapy [1,2,3,4]. Hand robotic assisting devices are used to provide support in the activities of daily living (ADLs) for a temporary phase to patients who have the possibility of regaining hand full control, or indefinitely for chronic patients, such as subjects affected by Parkinson’s disease, cerebral palsy, or dementia. Any support that can help to recover the full potential of the hand or at least being able to carry out ADLs with greater easiness has a strong impact on the quality of life, given the fundamental importance of the hand for these activities [5,6].
Soft exoskeletons are made of soft materials and are actuated by soft actuators or tendon/cable-driven mechanisms, differing in this from rigid exoskeletons, in which the transmission of motion to the joints of fingers or wrist is carried out through rigid mechanisms, such as linkages [7,8]. The possible misalignment of the rotation axes with respect to the joint axes is one of the main problems of rigid exoskeletons, since it can cause discomfort or pain and restricts movements. Soft exoskeletons are more recent than rigid ones, but applied research for these devices in recent years has grown considerably. This trend is motivated by the numerous positive aspects that soft gloves have, mainly related to their close interaction with the human hand. Even if less precise in movement generation as compared to rigid devices, they are characterized by greater lightness, compactness, are not affected by the joint misalignment problem, have a compliance that is important in the interaction with the hand, and are more versatile. More generally, soft gloves have biomimetic qualities that make them particularly suitable for biomedical applications [9].
Frequently, the soft exoskeletons are also equipped with sensors of various kinds, which allow detecting feedback in order to control the movement. For soft haptic gloves, on the other hand, sensors are the fundamental elements [10]. Typical commercial sensors, such as IMUs, pressure sensors, piezoelectric sensors [11], as well as soft sensors, often custom made, are used in haptic gloves to control real devices in telemanipulation [12] or virtual devices. In some cases, these gloves have actuators (often micro-actuators) that generate sensory feedback. The intense research activity on this topic and the multiplicity of solutions proposed make a detailed work of revision of undoubted interest and usefulness. Three specific reviews on the subject have been identified in the literature [7,9,13], alongside other articles which are not reviews but propose a valid analysis of the state of the art in the introduction [14,15,16]. Shahid et al. in [13] revised 45 soft robotic hand exoskeletons, for assisting and rehabilitative purpose, published within the years 2008–2017. The analysis is divided into two main parts: a systematic review focusing on their main properties (ergonomics, complexity, instrumentation, and actuation mode) and design criteria (number of fingers, active degrees of freedom, output force, and many other attributes), followed by a chronological review to identify the emerging trends in hand exoskeletons. Chu and Patterson, in [9], analyzed 62 articles (until 2017) representing 44 unique devices by comparing the different building approaches, and main features, such as actuation systems, total DOF, number of independent actuators, device weight, user intent detection methods, modes of rehabilitation, portability, and safety features. Du Plessis et al., in [7], review the state of the art of active hand exoskeletons, in the decade 2010–2020, with a main focus on rehabilitation and assisting devices. Design type (rigid or soft), purpose (rehabilitation, assistance, augmentation, or haptic), design requirements and topology, actuation, power transmission, degrees of freedom, weight, output force or torque, sensing, portability, adaptability and control methods of each device are the main categorization items. A summary table of 48 active hand exoskeletons and a synthetic description of 27 of them conclude the review. Quach et al., in [14], review in a table the actuation system, the type of usage, and the supported movements of 10 soft gloves found in the literature. Souhail and Vessakosol, in the introduction of [15] compare rigid and soft hand robotic exoskeletons and report in a table actuation system, type of usage, system sensors, and supported movements of 19 robotic gloves for rehabilitation (both rigid and soft). In [16], Chiaradia et al. summarize the state of the art of rigid and soft portable wrist exoskeletons since 2020. Table 1 highlights some key aspects of the reviews on soft actuators found in the literature and of some articles, which, although not reviews, present an in-depth analysis of the state of the art in their introduction.
From the analysis conducted on soft gloves reviews, it emerges that the most recent work with soft gloves as a specific topic is from 2018 and is related to rehabilitation and assistive devices, excluding haptic ones. A detailed review on haptic devices updated to 2021 is available, but mainly focuses on technologies and not on haptic soft gloves. A review updated to date, and which analyzes soft gloves dedicated to rehabilitation, assistive, and haptic applications, may contribute to providing researchers working in this sector with an updated state of the art on the subject.
Therefore, the focus of this paper will be on actuation, sensing, control, and purpose of soft gloves, considering the rehabilitation, assistive, and haptic application areas. In detail, the proposed literature review presents two different analysis levels: a prospective review, and an analytical review. The first one is a chronological analysis to map the publication distribution over time, by application field, function, actuation and article focus, and design solutions, with the aim of identifying the emerging trends. The analytical review describes the principal design solutions for soft gloves proposed in the literature by application area, obtaining an in-depth overview of the more recent and most used technologies for soft gloves actuation, sensing, and control techniques. Figure 1 schematically shows the two main levels of analysis, prospective and analytical, and the main aspects investigated in each of them.
2. Materials and Methods
In this section, the procedure applied for the articles selection and the taxonomies adopted for the prospective and analytical reviews are described.
2.1. Articles Selection Protocol
The data selection was performed querying the Scopus database with the search string “TITLE (soft AND glove) ”. The query was updated for the last time on the 4th of March 2022 and provided 157 research products, of which 74 Articles, no Reviews, 79 Conference Papers and Book Chapters, and 4 Others.
Figure 2 and Figure 3 depict at a glance the distribution of these results by document type, in terms of overall occurrences, and evolution by year. Literature reveals a balanced distribution between articles and conference papers, as well as a remarkably increasing trend of publication from 2012 to 2020.
On the basis of this preliminary investigation, a set of inclusion and exclusion criteria was then applied to select the proper literature, defined as follows.
Inclusion criteria:
- The study applies soft robotics technology to the development of a soft glove;
- The study presents at least one of the following aspects: the design, modeling and/or optimization of the soft glove, the control strategy and approach, a clinical study or a pilot study, the design of soft actuators or soft sensors for a soft glove;
- The soft glove is intended for rehabilitation, ADLs assistance, as a haptic device or to control a robotic device;
- The study depicts soft glove fingers and/or wrist actuation and/or sensing.
Exclusion criteria:
- The device contains linkages or, more in general, rigid mechanical elements which impose physical restraints on joint motion;
- The study treated aspects related to soft gloves other than those stated in the inclusion criteria (as, for example: soft glove contamination during tissue surgeries, tactile perception investigation, therapists’ evaluation of the perceived usability and utility of wearable soft robotic);
- The paper language is other than English.
A check was performed on the 157 emerging products looking for inconsistencies with the imposed inclusion criteria, and off-topic results or inconsistency of the document content with the review purpose. Figure 4 provides a flow chart of the selection process, which maps out the number of identified records, included and excluded, and the reasons for exclusions. The final dataset is composed of 126 documents.
2.2. Taxonomy
The taxonomies of the prospective and analytical reviews were the results of a two-phases process that guided the identification and selection of the possible classification items. In a first phase, an initial definition of fields and sub-fields was established, based on authors experience and on a preliminary analysis of the paper abstracts. Subsequently, the first set of items was iteratively updated in the course of the full papers analysis, by adding some fields that had not been considered or by removing others when the items were not dealt with in any work or in a very limited number of publications. Figure 5 and Figure 6 provide the overview of the taxonomy adopted for prospective and analytical review, complete with the adopted identifier for each class and sub-class.
2.3. Data Analysis
The 126 documents of the final dataset were analyzed according to the described taxonomies and mapped in dedicated tables (see Table A1 in the Appendix A). The categories in each classification have not been treated as exclusive classes, meaning that the same document could be mapped in more categories, depending on the presence of specific characteristics. Data were then rearranged and evaluated, and the main results are presented in the following with a schematic approach.
3. Prospective Review
Among the final 126 selected documents, no reviews have been detected. As Figure 7 and Figure 8 depict, the dataset is composed of 57 articles, 64 conference papers, and 5 book chapters, mostly published from 2014. The well balanced distribution between journal papers on one side and other publication types on the other, suggests that soft gloves-related technologies represent an already stably addressed topic in scientific literature, and that it is also quickly evolving.
Most of the documents focus on clinical application, primarily rehabilitation (58 products, 46%), and assistance (47, 37%) to follow. Figure 9 provides an insight into the identified application fields, with detail of the interested anatomical districts for the two most populated categories, i.e., rehabilitation and assistance. The additional sub-class, labeled as a mirror-therapy-based system, highlights an explicit indication in the text of the suitability of the described device as a tool for this specific kind of therapy. Fewer documents (7, 6%) refer to the use of soft gloves as soft ortheses, i.e., functionally equivalent to basic tools in the movement of the hand, or as haptic devices (22, 17%), for instance, for the remote control of external systems like rovers [17], as well as hand motion tracking and recognition [18]. The distribution of the soft gloves for application fields categories over time (Figure 10) shows a similar growth trend from 2014 to 2020 for rehabilitative, assistive and haptic soft gloves.
Table A1 in Appendix A presents the detail of the classification.
Focusing on the expected functionality of the soft gloves, presented in Figure 11, literature reveals that most of the devices has been conceived to actuate the limb (72 papers, 57%), and about three times less to capture hand state and motion information by sensors (24, 19%). A similar amount of described gloves (21, 17%) finally integrates both the functions of actuation and sensing. As Figure 12 depicts, soft gloves with integrated function are especially present in the last years, since 2019.
Analyzing the documents in terms of paper focus (see Figure 13), most of the products present clinical-related topics: in particular, 38% of the documents refer to rehabilitation and assistive devices, and 13% to clinical trials. Actuators are the second most addressed topic (30 papers, 24%), with particular attention paid to the design of new actuators (17 documents). Sensing and haptic devices and control approaches are the almost equivalently investigated, with 20 and 17 documents (16% and 13%), respectively. Finally, Figure 14 describes the evolution of the main addressed topics in time, revealing that papers especially focusing on control strategies for soft gloves have only been present in most recent years.
Finally, Figure 15 and Figure 16 highlight the distribution of soft gloves among device types and their evolution in time, respectively. Most of the gloves can be classified as pneumatic systems (61 papers, 48%), and tendon-based gloves follows (30, 24%). The combination of pneumatic and tendon-driven systems is present in the gloves of just three papers (2%), and a similar number of documents describes hydraulically actuated gloves (4 documents, 3%). Wearable haptic devices are finally presented in 16% of the investigated documents (20). The analysis of Figure 16 reveals that the increase in the number of published papers of the last years is especially due to the contribute of the pneumatic gloves category.
4. Analytical Review
4.1. Soft Gloves Analysis Based on Applications
Actuated soft gloves, which contribute to move the fingers and/or the wrist, are mainly developed for rehabilitation or to assist disable people in ADLs. The design of these two classes of robotic hand glove (rehabilitative and assistive) is based on different requirements, almost mutually exclusive [19]. The main requirements for assisting hand exoskeletons are minimum weight and maximum mobility. Therefore, they should: be light and portable, minimize the wearer’s discomfort by conforming to the hand anatomy, allow considerable displacements without restricting the mobility of the injured hand joints, and be easy to wear. Rehabilitative gloves have a precise hand motion control as the main design requirement. They are mechanically robust, not necessarily portable, and without stringent limitations on their weight, or need for mobility as much. On the other hand, a common requirement for both is safety in human–robot interaction. Soft gloves, with their inherent compliance, are particularly suitable for allowing this safety. Some robotic gloves are specifically designed for rehabilitation and others to assist. However, from the analysis carried out in the prospective reviews, it emerges that despite these different functional needs, some devices are proposed for both rehabilitation and assistance. In the analyzed literature, 45 devices are for rehabilitation only, 34 for assistance only, and 13 for both (Figure 17).
Polygerinos in [20] resumes values of the main performance requirements of a soft robotic glove, grouped into: (i) practical considerations, (ii) motion and force, and (iii) control, based on experimental studies, reviews and discussions with expert therapists. In [20], no distinction is made between rehabilitation gloves and assistive gloves. Therefore, these values can be taken as a general reference, which, however, may be subject to variation for the two different types of gloves. For the practical considerations group, the glove mounted on the hand should weigh less than 0.5 kg, the total weight of all the other elements of the system should not exceed 3 kg, and actuators height and width should not exceed finger’s height and width, and a reasonable value is about 2 cm. Matheus et al. [21] analyzed a very large number of objects of daily living, identifying their main characteristics, and this analysis resulted in a maximum weight of 1.5 kg. They also experimentally evaluated the static friction coefficient of seven objects towards six common surfaces (wood veneer, granite, linoleum, glass, unfinished wood, and stainless steel) and a mean value of 0.255 resulted. Based on this maximum weight and mean friction coefficient; in [20], authors estimate a distal tip force of around 7.3 N to achieve such a palmar grasp. The customization of the glove, and specifically of the actuators size, furthermore, is another important requirement to provide maximum rehabilitative benefit. For the motion requirements, in an ideal condition, the DOF for each finger should be 3 (2 bending DOF and 1 rotating for the thumb, and 3 bending for the other fingers), the bandwidth of the soft robotic glove should be about 0.5 Hz. For the force range, which should be adequate to enable ADLs, healthy individuals can generate a maximum grip strength up to 300 N for adult females and 450 N for adult males [22]. A bandwidth of 10 Hz for the controller allows a smooth response of the system. As operating time requirements, 2 h for continuous motion and 6 h for intermittent are adequate for rehabilitation sessions or ADLs assistance. Table 2 summarizes the main functional characteristics of the revised soft gloves for which at least one of these characteristics is declared in the article.
Figure 18 schematizes the joints of the hand and the related nomenclature, used to indicate the range of motions (ROMs) of the analyzed gloves.
Figure 19 shows the distribution of the soft gloves analyzed as a function of the number of actuated fingers. It can be seen that most of the devices (61%) have been developed to move all the fingers. In terms of significant percentage, the movement of three fingers is the principal alternative (16%), with the specific thumb, index and middle finger. As a matter of fact, the movement of these three fingers makes it possible to carry out a significant number of essential functions and gestures ADLs. The actuation of a single finger or two is found in a very limited number of devices, and in these cases it is motivated by the realization of a proof of concept of the actuation system.
For the thumb motion, the actuation requires different technical solutions compared to the other fingers. This explains why some solutions focus only on the other digits, not providing for the actuation of the thumb. Due to the thumb having one less phalanx, the related actuator must have different construction characteristics; furthermore, performing the adduction/abduction movement, which makes possible thumb opposability and is a very important function in ADLs, is technologically more complex than the flexion/extension movement. Only some works [32,33,51] faced this problem, proposing specific solutions. In the following discussion this aspect will be highlighted.
The following sub-paragraphs discuss the main aspects of the devices, divided by application type, and report a final discussion.
4.1.1. Rehabilitative and Assistive Soft Gloves
The functional requirements of rehabilitative gloves and assistive gloves are quite different, as already described in the introductory part of Section 4.1, however the boundaries between the two different fields are not well defined, so some authors propose their glove both for rehabilitation and assistance. These solutions reach a compromise between the functional needs of a rehabilitation glove and an assistive one. More frequently, soft gloves are intended either for rehabilitation or for assistance.
In the following, attention is paid to devices, rehabilitative, assistive, or both assistive and rehabilitative, which have particularly interesting characteristics either from the point of view of the structure or the type of implementation.
Figure 20 collects some soft gloves proposed for rehabilitation or assistance.
Do et al. in [25] presented a glove with five PneuNets soft actuators (Figure 20a). To achieve bending, they are connected to a single 2/2 solenoid valve which provides compressed air through an air pump motor, and to discharge the chambers another 2/2 valve connects the soft actuators to a vacuum source to reduce the deflation time. The fingers are moved at the same time as the power supply of the five actuators is common. The glove opening and closing are commanded through a touch sensor. Test on the ability to hold objects showed good results with 30–220 g objects, while for heavier objects the maintaining lifting time is limited to a few seconds. The maximum weight limit that could be lifted was 500 g.
The soft pneumatic glove (Figure 20b) developed by Wang et al. in [52] is based on segmented PneuNets bending actuators (SPBAs), in which the distribution of the air chambers varies according to the anatomy of human fingers, to make the bending outline conform with fingers. They actuate all three bending degrees of freedom of each finger. With an inflating pressure of 120 kPa, the glove can fully close the human hand. An analytical model and experiments to evaluate the fingertip forces are presented, and the standard error between their results is 8.87%. Under a pressure of 150 kPa, the analytically evaluated fingertip contact force for each actuator reaches up to 1.55 N and the experimental one is 1.60 N. Between the four fingers and the lower part of the palm, the maximum grasping force produced is of about 6.4 N. With a friction coefficient of contact equal to 0.46, a patient with disability can grasp an object with weight of about 600 g.
The Print-it-Yourself (PIY) Glove of Ang and Yeow [43] in Figure 21D is a hand assistive and rehabilitative exoskeleton, fully 3D printed, made in a flexible thermoplastic elastomer filament (TPU Ninjaflex). The glove is formed by three main parts: (i) the fold-based bending actuators (one for each finger) pneumatically actuated; (ii) the open palm glove base with straps; and (iii) the waist belt control system, also connected to an EMG armband. The glove, and the actuators particularly, can be easily customized and cheaply fabricated with a consumer level 3D printer. EMGs signals are collected on the impaired hand and serves to collect residual muscle activity for EMG-based control. In the literature, the use of sEMG for control functions are used in a significant number of works, in systems for both the rehabilitation of the hand, the elbow, and other joints [23,41,46,53,54,55,56,57]. The measured grip force equal to 41.8 N is adequate for ADLs activity. The ROMs of index and of thumb (measured with a VICON Motion system) are very far from the values of a healthy subject, in detail achieving only 33%, 82%, and 30% in the DIP, PIP, and MCP joints of the index finger, and 9%, 7%, and 45% in the IP, MCP, and CMC joints of the thumb.
In [47], five pneumatic soft-and-rigid hybrid actuators, which can be independently controlled, with a closed-loop control based on IMUs sensors at the fingertips and an IMU sensor at the proximal end (base) as reference (Figure 20d).
The MR-Glove (Magnetic Resonance Glove) in Figure 20d [45], with soft actuators made of silicone elastomers with a corrugated-fabric layer, is MR compatible as it contains no ferromagnetic materials and operates pneumatically, thus allowing to perform fMRI (functional Magnetic Resonance Imaging) studies to study brain activities and motor performances during hand rehabilitation and to investigate the functional effects of rehabilitation robotics on brain stimulation. The closing state is achieved with pressurization, while the opening hand state is passively caused by the elastic forces of the elastomers.
Panagiotis Polygerinos is one of the pioneers of soft actuators and soft gloves, and developed intense research activity in the field. Among his large number of published works, four were selected on the basis of the criteria described in Section 2. In [58], he presented a soft robotic glove for Rehabilitation, in [59] a soft glove for Assistance, and in [20,48] a device for both Rehabilitation and Assistance. In [58], the preliminary results for the design, development, and evaluation of a hand rehabilitation glove fabricated using pneumatic soft actuators based on the PneuNet principle of operation are presented. The glove later developed [20,48], for both rehabilitation and assistance, is hydraulically actuated (with water as fluid) with moulded multi-segment elastomeric soft actuators. Fiber reinforcements on the actuators enable bending, twisting, and extending motions. The device (Figure 21A) has the following characteristics: an open palm design, ability to generate forces adequate to ADLs (about 8 N at fingertip, with 345 kPa), total weight of 285 g, possibility to support continuous operation for about 3.8 h, and actuation speed of 0.25 Hz. This device is the only one with hydraulic actuation among all those that have been analyzed in the review.
Figure 21.
Gloves proposed both for Rehabilitation and for Assistance. (A) Hydraulically actuated soft glove, with moulded multi-segment elastomeric soft actuators with fiber reinforcements [48]. (B) Flexo-Glove, a tendon-driven rehabilitative and assistive glove, based on a 3D-printing process [41]. Letters (a–h) refer to the original source. Reprinted/adapted with permission from Ref. [41]. 2018, IEEE. (C) Soft, a glove with soft joint structure based on composite fabric material [31]. (D) Soft glove with thin McKibben pneumatic actuators [60]. Reprinted/adapted with permission from Ref. [60]. 2020, IEEE.
Figure 21.
Gloves proposed both for Rehabilitation and for Assistance. (A) Hydraulically actuated soft glove, with moulded multi-segment elastomeric soft actuators with fiber reinforcements [48]. (B) Flexo-Glove, a tendon-driven rehabilitative and assistive glove, based on a 3D-printing process [41]. Letters (a–h) refer to the original source. Reprinted/adapted with permission from Ref. [41]. 2018, IEEE. (C) Soft, a glove with soft joint structure based on composite fabric material [31]. (D) Soft glove with thin McKibben pneumatic actuators [60]. Reprinted/adapted with permission from Ref. [60]. 2020, IEEE.

Figure 22.
Soft gloves for Rehabilitation and for Assistance. (a) The thin McKibben-based soft glove developed by Takahashi et al. [61]. Reprinted/adapted with permission from Ref. [61]. 2019, IEEE. (b) The glove developed by Hu et al. based on positive–negative pneumatic actuators made of bellows [33]. Reprinted/adapted with permission from Ref. [33]. 2020, IEEE. (c) Hybrid, soft exoskeleton glove with a telescopic extra thumb [32]. Reprinted/adapted with permission from Ref. [32]. 2020, IEEE. (d) The glove presented by Setiawan et al. [27], with a silicone made body. (e) The fabric-based soft robotic glove with 4 DOF presented by Cappello et al. [39].
Figure 22.
Soft gloves for Rehabilitation and for Assistance. (a) The thin McKibben-based soft glove developed by Takahashi et al. [61]. Reprinted/adapted with permission from Ref. [61]. 2019, IEEE. (b) The glove developed by Hu et al. based on positive–negative pneumatic actuators made of bellows [33]. Reprinted/adapted with permission from Ref. [33]. 2020, IEEE. (c) Hybrid, soft exoskeleton glove with a telescopic extra thumb [32]. Reprinted/adapted with permission from Ref. [32]. 2020, IEEE. (d) The glove presented by Setiawan et al. [27], with a silicone made body. (e) The fabric-based soft robotic glove with 4 DOF presented by Cappello et al. [39].

The Flexo-Glove (Figure 21B), developed by Mohammadi et al. [41], is a tendon-driven device both for rehabilitation and assistance based on a 3D printing process of a structure made of flexible thermoplastic polyurethane (TPU). Fingers (except the thumb) are actuated through micro-DC motors, each one connected to two spools to have two cables moving in opposite directions, so as to allow bidirectional actuation, actively controlling both flexion and extension. The performance in terms of force is adequate for ADLs activities, in particular, the pinch force is 20 N, while force reaches 40 N with cylindrical grasping. Furthermore, back drivability is not allowed, due to the internal gearing of the motor, permitting a solid hook grip (up to 5 kg), and also key pinches are possible. The total weight of the system (including batteries) is of 320 g, perfectly aligned with high portability. The device can be customized thanks to a parameterised CAD design of the glove and the 3D scanning of the impaired hand.
Chen et al., in [31], proposes a glove with a soft joint structure based on composite fabric material (Figure 21C). The actuators, in order to imitate the biological structure of the human hand, are designed as the combination of phalanges and soft joints. The characterization of the actuators resulted in joint angles of DIP, PIP, and MCP of 72, 98, and 81, and in output torque of 1.82 Nm, 1.44 Nm, and 1.18 Nm, respectively. Authors concluded that the bionic soft glove is dexterous in grasping, conforms to the universal grasping characteristics of human hands, has the function of ADL, and meets the requirements of rehabilitation, as confirmed by experimental tests.
Figure 21D shows the soft glove with pneumatic thin McKibben muscles (which are extremely lightweight) proposed by Koizumi et al. [60]. On the back of the hand, in correspondence with each finger, an actuator, consisting of several intertwined thin McKibben muscles, allows the extension of the finger. Two helically wound filaments on the digit are used for the flexion of the finger, therefore arranging a linear actuator in a helical shape, similar to three-point bending. The McKibben muscles for the extension and the flexion have different diameter, due to the high force required to extend the hand of stroke patients or of a patient with spasticity. The length of the actuators can be adjusted according to the patient fingers length and the required ROM. The glove results compact, is characterised by high usability and easy wearability. Experimental tests at 300 kPa measured a fingertip angle ranging between −49 to 106 and 500 g water bottle can be successfully grasped, even if the hand is shaking severely.
In [19], Burns and Vinjamuri present the second prototype of the hand exoskeleton with embedded synergies (HEXOES). The MCP and PIP joints flexion for the thumb and for each finger is actively cable-driven actuated through remote linear electric actuators, while the extension is passive, thanks to springs, whose pretension can be adjusted. Overall, HEXOES provides independent actuation for 10 degrees of freedom. The glove weighs 258 g and the total actuator assembly has a mass of 2.2 kg. A closed-loop control is enabled by flex sensors placed over the actuated joints and force sensors on the robot’s linear actuators.
Takahashi et al. in [61] (Figure 22a) present the concept, implementation and performance analysis of a soft glove actuated through thin McKibben pneumatic muscles of about 2.5 mm of diameter, obtaining little constraints on volitional movements. Overall, 20 active DOF are obtained by using the McKibben muscles on the back side of the hand as the flexor digitorum profundus muscles (i.e., deep muscles) responsible for flexing and those on the inner side of the hand as flexor digitorum superficialis (i.e., shallow muscle) responsible for extending. The obtained fingertip pushing force, with a pneumatic input pressure of 0.4 MPa, is 8 N and the pulling one is 4 N. Experiments confirmed a 10 Hz of maximum switching frequency, furthermore the quantitative results show the controllability of the bend and extension state of the finger using the system.
In the glove presented by Hu et al. in [33], 6 DOF (fingers flexion/extension and thumb abduction/adduction) are actuated by positive–negative pneumatic actuators made of bellows. The authors focused the design of the device on allowing the user to independently perform the common ADLs, and identified accordingly the minimum ranges of motion necessary for this purpose. For the thumb in particular, the CMC rotation range is small and the swing range is large, whereas, at the opposite, the MCP rotation range is large and the swing range is very small. So, they mainly achieve the swing of CMC, and the rotation of MCP and IP. For other fingers, the swing of MCP is not necessary because of the small range of swinging and the little influence on the movement of grasping. Authors achieved the motion of the thumb by simplification of the system identified for the other fingers. Since the amplitude of the swing in the MCP of a thumb is negligible, the three joints of the thumb can be approximated as always moving in a plane, and the thumb can be adducted/abducted by the swinging of CMC. So, the authors fixed the adduction/abduction actuator between thumb and side of palm. When pressure is negative/positive, the actuator contracts/elongate to adduct/abduct the thumb. The maximum measured extension forces of the actuators with 90 kPa resulted: for extension 4.6 N, for flexion 1.9 N, for adduction 8.1, and for abduction 5.7 N. The main positive features of the device are: lightness (it weighs only 149 g), comfortability, customizability, ease of implementation, safety, and low-cost. Due to the segmented structure of each actuator, flexion, and extension of 14 joints in five fingers, and adduction and abduction of the thumb can be actively assisted by the glove, to perform the thumb opposability. Multiple gestures and object grasping can be performed through the device, as shown in Figure 22b.
Gerez et al. [32] developed a hybrid (pneumatic and tendon-driven) hand glove (Figure 22c). Five artificial tendons, positioned along the hand palm, connect the electric actuators with the tendon termination structures at the tips of the fingers allowing finger flexion, while extension is passively obtained through elastic bands at the back of each digit; one sixth tendon is located at the thumb side, to obtain thumb abduction. Fingers active abduction is obtained with three pneumatic chambers with a “V” shape, fixed in the region in between the fingers, while adduction is passive. A telescopic pneumatic extra thumb, positioned next to the wrist, helps in grasping tasks, increasing the area of the contact patches between the hand and the object, and increasing both grasp efficiency and stability. The forearm Flexor Digitorum Superficialis EMG signal is used to trigger the glove motion. The authors conclude that this hybrid solution can enhance the grasping capabilities of the users, offering robust grasping with a lightweight and soft design.
The soft glove developed by Setiawan et al. in [27] has 2 DOF actuated by Bowden cables, which transmit the motion from two DC motors to the fingers, allowing flexion and extension of index, middle, and ring (middle and ring are driven together). A flexible RTV (room-temperature vulcanization) silicone rubber (as in Figure 22d) is used to realize the soft glove structure. A fuzzy logic control (FLC) is employed for controlling the motion of the motor-tendon actuators.
The fabric-based soft robotic glove of Cappello et al. [39] has actuators comprised of three fabric layers and two air-tight bladders placed between each fabric pocket (Figure 22e). Selective pressurization of the bladders allows finger flexion and extension. The obtainable grasping force, with air pressurized to 172 kPa, is 15 N. The active movements controlled by the glove are: thumb flexion and extension, index and middle finger flexion, paired index and middle finger extension, and paired pinky and ring finger extension and flexion. The glove is portable, bidirectional (assisting both hand opening and closing), and multi-posture (i.e., enables palmar grasp and pinch grasp).
4.1.2. Rehabilitative Systems for Bilateral Training and Mirror Theraphy
Bilateral training is a rehabilitative therapeutic technique, adopted in hemiparetic patients as stroke survivors, in which both limbs are involved in completing a task. The results of the randomized, blinded study presented by Stoykov et al. in [62] showed that bilateral training for moderately impaired chronic stroke survivors may provide a major improvement in distal movements outcomes compared to the unilateral one. The reason for this is that patients could express and implement the intention of movement during bilateral training autonomously. The bilateral training augmented with mirror therapy has also been shown to be efficacious, as verified by Yavuzer et al. [63], as well as assisted robotic rehabilitation [64]. Mirror Therapy (MT), initially created to control phantom limb pain, is actually successfully used in stroke patients. In classical MT, patients watch the movement of the healthy arm into a mirror and imagine the impaired one is doing the same thing. MT can be combined with robotic gloves, creating a system in which the healthy hand movement controls the robotic device on the impaired hand [55]. The combination of mirror therapy and robotic rehabilitation can lead to even greater improvements of each technique individually. Among the revised works, eight articles present a mirror-therapy-based bilateral system. Figure 23 collects images of some of these devices. Most of them are dedicated to rehabilitation. One is proposed for both rehabilitation and assistance.
In [54], Yumiao Chen et al. present SExoG (Soft Exoskeleton Glove), a low-cost soft glove controlled by sEMG (surface Elettro-MioGraphic) signals collected on healthy limb for bilateral training (Figure 23a). Four states of the non-paretic hand (extension, rest, spherical grip, and fist) are recognized through a two-step hybrid model combining a neural network and the state exclusion algorithm. The mean accuracy for concrete sEMG classification is 96.6%. SExoG drives the impaired hand to perform the movement recognized on the healthy forearm. Four Ag/AgCl strip electrodes are located on the healthy limb forearm, distributed around the arm forming a ring, each electrode not corresponding exactly to a muscle. Solution adopted to position electrodes in a faster and easier way. The soft glove motion is generated through four segmented PneuNets soft actuators, whose design is based on a variable stiffness of both the elastomer surface and air chamber. The actuators are connected to a single valve; therefore, individual movements are not allowed. In the control, there is a delay (not exactly quantified) when following continuous control messages.
Xiaoshi Chen et al. in [65] present a hand rehabilitation system (Figure 23b) based on the concept of mirror therapy, in which a soft glove is controlled through Machine Learning (ML)-based algorithms applied on the EMG signals collected on the non-affected hand by the MYO armband commercial device. The EMG signals are classified, with the aim to identify the hand gesture among 10 predefined types. A soft glove with flex and pressure sensors is worn on the healthy hand, providing feedback signals to the control module and correcting the fine motion of the rehabilitative glove. The actuated glove is tendon-driven with electric servo-motors and only finger extension is actively driven. In the study, different sets of features extracted from the raw EMG signals are compared and the optimal set for the application resulted formed by mean absolute value, root mean square, waveform length, and standard deviation. ANNs obtained a classification accuracy of 99.3% and a prediction time around 5 ms.
The rehabilitation system developed by Li et al. [30] is formed by a soft glove, with five 3D-printed soft actuators, controlled by a data glove worn on the healthy hand (Figure 23c). The actuators are printed using the NinjaFlex 85A TPU soft material and each one has two degrees of freedom, allowing the movement of the MCP joint independent from that of PIP and DIP joint. The gesture and joint movement data of hand are displayed in real time in a C++ based dedicated software. The data glove used is the WiseGlove14, developed by the Chinese Beijing Xintian Shijing Technology. No details of it are provided in the article.
Gerges et al. [66] developed a soft glove controlled through the movement of the healthy hand measured with a flex-sensor-based glove, to allow bilateral training of stroke patients (Figure 23d). The produced PneuNets soft actuators, made of silicone rubber, differ from those presented by other authors because even at low pressures (about 99 kPa) they allow obtaining a maximum force at the finger-tip, equal to about 9.5 N.
In [67], Yap et al. describe a fully fabric-based bidirectional soft robotic glove (Figure 23e) controlled by the signals of flex sensors in a data glove worn on the healthy hand, for bilateral training, simulating the mirror therapy used in stroke rehabilitation. The system is particularly light, compact, and cheap.
4.1.3. Haptic Soft Gloves
Among the revised soft gloves, 20 are haptic gloves. This not-low number highlights how the research aimed at studying the applicability of soft technologies also in the haptic field is remarkable.
For wearable devices, such as gloves, which require flexibility, softness, and stretchability, soft sensors are emerging to replace rigid sensing units, and the research activity on innovative soft sensors is very intense and prolific [68,69,70]. Figure 24 shows the distribution of the sensors types used in the analyzed gloves. Flex and air pressure sensors are the most diffused, followed by force or strain sensors and sEMG sensors. The diffused use of flex sensors to detect the fingers bending angle, or force or strain sensors perfectly consistent with the function of a soft glove. The use of pressure sensors to control the developed force or the air pressure in the actuators is aligned with the prevalence of pneumatic gloves, as emerged from the analysis summarized in Figure 15. As will be shown in Section 4.3, devoted to the control of soft gloves, the use of solutions based on electromyographic signals is widespread, consequently sEMG signals are frequently used. Gyroscopes, IMUs, piezo-electric PVDF sensors, and rotary potentiometers fall in the Others group. Unlike soft gloves with actuation, for which the thumb requires dedicated design choices, in most of the haptic solutions involving tactile feedback, the thumb is treated like all other fingers. Similarly, in the case where bending movement is to be detected, but also for adduction/abduction movements, as in [71].
Different applications of haptic soft gloves are possible, as to give sensory feedback to amputee when using hand prostheses or for virtual reality applications, for which hand pose detection and/or tactile feedbacks are needed.
Simons et al., in [72], present a haptic soft glove to give sensory feedback to amputees using a robotic hand prosthesis (Figure 25A). In detail, when a pressure is experienced at the prosthetic fingertips, a mechano-tactile stimulation is provided on the user’s arm. The fingertip tactile feedback provided by the glove is based on a fluidic system formed by three main parts: silicone-made pressure pad tactile sensors worn on the fingertips and connected to silicone channels, a control unit, and a tactile armband. The fluid contained in the circuit is conductive and electrical circuits are closed when it bridges the gap between pairs of electrodes in the circuit. Coiled SMA wires are used in the tactile armband and when the control circuit actuates them, they contract, causing the armband to gently squeeze the user’s arm. The proposed device allows more natural object grasping, but also could reduce phantom limb pain and increase prosthetic device acceptance.
Another glove proposed to be used in conjunction with a hand prosthesis to provide human hand-like sensory perceptions was developed by Kim et al. [73]. The glove allows having a feedback on hardness, degree of humidity, and temperature of objects touched or grasped (Figure 25D). Temperature, pressure, and humidity sensors, and flexible electronic wire connections are printed on the palm side of a commercial textile glove.
Figure 25.
Haptic soft gloves. (A) Soft glove for sensory feedback when using an hand robotic prosthesis [72]. (B) Capacitive sensors based soft glove to interactively capture hand poses [74]. (C) Soft glove with new SPAs which provide tactile feedback [75]. (D) Soft glove with embedded temperature, pressure, and humidity sensors [73]. Letters (a–l) refer to the original source.
Figure 25.
Haptic soft gloves. (A) Soft glove for sensory feedback when using an hand robotic prosthesis [72]. (B) Capacitive sensors based soft glove to interactively capture hand poses [74]. (C) Soft glove with new SPAs which provide tactile feedback [75]. (D) Soft glove with embedded temperature, pressure, and humidity sensors [73]. Letters (a–l) refer to the original source.

A capacitive sensor-based soft glove to interactively capture hand poses is proposed by Glauser et al. in [74], achieving a 35% improvement in pose identification compared to commercial data gloves. A composite of stretchable capacitive silicon sensor array is embedded in the glove (Figure 25B) and a deep neural network based algorithm is used to reconstruct the pose from the collected sensing data. The network training is very efficient and easy, being performed only once, and the per-use calibration is performed on-the-fly.
Another particular type of soft sensor to be used in a soft glove for human hand motions identification has been developed by Nassour et al. [71]. These fluidic bending sensors are obtained with commercially available silicone tubes, hosting a conductive liquid (electrolyte solution of potassium iodide, KI). The electric resistance of electrolyte solution varies with sensor strain. Fingers flexion/extension as abduction/adduction can be measured by the sensors suitably positioned on a soft glove, as the authors demonstrated with their haptic glove prototype. The sensory glove successfully replicates hand motion. They used machine learning algorithms to estimate the angles of the joints in the hand and also to identify 15 gestures.
A soft glove which provides fingertip tactile feedback is presented by Song et al. in [75]. The feedback is provided by a new silicon made SPA (Figure 25C), whose operation is based on internal air pressure generated by an electrostatic force, without requiring an external air compressor. The application of different polarity voltages on the electrodes causes the downward movement of the upper electrode and the consequent displacement of the trapped air towards the central part, so that the fingertip of the user can sense the swollen silicone, that is, the tactile feedback.
Innovative fabrication processes of soft sensors, embedded or applied on haptic glove, have been investigated and proposed. A direct ink writing (DIW) of a conductive liquid (eutectic gallium-indium), for soft bending sensors fabrication process is suggested by Kim et al. in [76]. The main advantage, in addition to reliability, flexibility, programmability, and efficiency of the process, is the automation of the realization of all parts of the sensor, including sensing units, wiring, and the electrode part (Figure 26A). The accuracy in the measure obtained to date is still limited. The haptic glove developed with this technology measured joint angles with root-mean-square error smaller than 5.
Soft robotic gloves can also provide haptic kinesthetic force feedbacks for virtual reality applications, as for the glove developed by Jadhav et al. [77], which provides a force feedback to the fingers while clicking a button in virtual environments. Soft actuators, positioned on the dorsal side of the fingers, are obtained with a silicone-rubber-made structure, with a wire, passing through a tube, connected to McKibben muscles. The force exerted at the fingertip is approximately 2 N.
For the same purpose of obtaining a haptic force feedback, Wang et al. [78] present a soft glove actuated by fiber-reinforced pneumatic soft bending actuators. Based on the unilateral deformable feature of the soft actuator, a dorsal-side mounted soft-rigid linkage mechanism is proposed to produce fingertip force feedback, as shown in Figure 26C.
Figure 26.
Haptic soft gloves. (A) Soft sensors produced with direct ink writing (DIW) of a conductive liquid ([76]). Reprinted/adapted with permission from Ref. [76]. 2018, IEEE. (B) Hybrid exoskeletal-soft glove for the application of sensors that can be placed close to the center of rotation of the digit joints ([79]). Reprinted/adapted with permission from Ref. [79]. 2019, IEEE. (C) Haptic force feedback soft glove actuated by fiber-reinforced pneumatic soft bending actuators [78]. Reprinted/adapted with permission from Ref. [78]. 2020, IEEE. (D) Novel low-cost soft stretchable bending sensor, with bending/stretching feature [80]. Letter (a) refers to the original source. (E) Pressure and strain sensors, based on conductive fluid resistance variation, embedded in a silicone made structure [81]. Reprinted/adapted with permission from Ref. [81]. 2014, IEEE.
Figure 26.
Haptic soft gloves. (A) Soft sensors produced with direct ink writing (DIW) of a conductive liquid ([76]). Reprinted/adapted with permission from Ref. [76]. 2018, IEEE. (B) Hybrid exoskeletal-soft glove for the application of sensors that can be placed close to the center of rotation of the digit joints ([79]). Reprinted/adapted with permission from Ref. [79]. 2019, IEEE. (C) Haptic force feedback soft glove actuated by fiber-reinforced pneumatic soft bending actuators [78]. Reprinted/adapted with permission from Ref. [78]. 2020, IEEE. (D) Novel low-cost soft stretchable bending sensor, with bending/stretching feature [80]. Letter (a) refers to the original source. (E) Pressure and strain sensors, based on conductive fluid resistance variation, embedded in a silicone made structure [81]. Reprinted/adapted with permission from Ref. [81]. 2014, IEEE.

Trott et al., in [79], present a hybrid exoskeletal-soft glove for the application of sensors that can be placed close to the center of rotation of the digit joints, providing on-axis rotation measurements (Figure 26B).
As already confirmed by the distribution of sensors versus the measured variable (Figure 24), bending sensors are widely used in soft gloves and numerous researchers are engaged in the search for new types of sensors that measure flexion. Shen et al. [80] developed a novel low cost soft stretchable bending sensor (Figure 26D), with a bending/stretching feature, which means that it is insensitive to stretching while it is flexed. The sensors are based on Ethylene Propylene Rubber (EPR) and, when mounted on the soft glove, the sensor is connected to the circuit through a sliver plated nylon thread.
Soft sensors embedded in a soft glove to measure both human hand motions and tactile pressures during human gesturing and manipulation tasks have been presented by Hammond III et al. in [81]. The sensors working principle is based on the resistance variation of a conductive fluid (eutectic alloy of gallium–indium–tin, known as gallinstan) when compressed or stretched. The fluid is embedded in an elastomer housing obtained through a layered molding and casting process. For the pressure sensor, the fluid channel is spiral in shape, while for the strain sensor the channel is serpentine in shape (Figure 26E).
4.2. Soft Gloves Actuation
Soft gloves are mainly operated through pneumatic soft actuators, as emerged from the prospective review (Section 3). As visible in Figure 27, in the 66% of cases the actuation is pneumatic, in the 30% tendon-drive, and just in the 4% hydraulic.
Many different kinds of pneumatic soft actuators have been conceived, developed, and tested over the years. In general, the definition of pneumatic soft actuators follows many different constructive solutions, which can be classified into the following four main categories: (i) Pneumatic Artificial Muscles (PAMs, as McKibben muscles); (ii) Fluidic Elastomer Actuators (FEAs) or sometimes called Soft Elastomer Actuators (SEAs), such as PneuNets actuators or soft bending actuators (SBAs); (iii) fabric-based actuators; and (iv) 3D-printed actuators. In each class, different constructive solutions, which sometimes define subclasses, can be found.
Figure 28 shows the distribution of the main types of actuators used in the analyzed soft gloves. Among the silicon made pneumatic actuators, fiber reinforced soft bending actuators are the most frequently used, followed by pneu-nets actuators. The other pneumatic types have a quite similar frequency. In the Others class there are particular constructive types of actuators, mainly pneumatic, such as: embedded inflatable actuators that are fabricated by heat bonding of flexible plastic sheets, or pneumatic actuators with variable stiffness.
Although electric actuators have the highest percentage, the most significant comparison is between the overall percentage of pneumatic actuators (76.92%) and the electric ones (20%). This comparison, once again, confirms the prevalence of pneumatic over electric actuation for soft gloves developed by researchers.
Soft gloves may allow the actuation of either flexion only or extension only, or both. Figure 29 shows that there is a clear prevalence of solutions in which both flexion and extension are actuated, but usually the flexion is actively actuated, while the extension passively. This preference for flexion over extension can also be observed in the percentages of the gloves in which only one of these two movements is actuated.
The material of which the soft actuators are made is more frequently silicone rubber (for the 71.43%), as can be seen from the pie diagram in Figure 30. Research on fabric made actuators, widespread for the 12.70%, is increasing, thanks to their lightness, ease of insertion on the glove, and reduced bulk.
As regards the manufacturing techniques of soft gloves (Figure 31), the most widespread technique is casting in a mold (for 45%). This is motivated by the fact that the most common material for making soft actuators, as seen above, is silicone rubber. The realization of silicone-rubber-actuators with 3D-printing has been studied by some authors, but presents various issues, including difficulties in adequately calibrating the printing parameters, and, therefore, is still not widespread. The 10% of 3D-printing contains both the 3D-printing of plastic components, as the 3D-printing of silicone rubbers (but the latter is a minority). The production technique by assembly is also quite used, because numerous particular actuators have been developed, made in several parts to be assembled.
The main pneumatic actuation solutions, but not only those, described in the revised articles are shown in Figure 32 and are illustrated below.
In 2013, Polygerinos et al. ([58]) presented the manufacturing procedure and the mechanical characterization in terms of bending curvature and force response, based on both finite element modelling (FEM) analysis and experimental tests, of PneuNets soft actuators (Figure 32A). These pneumatic soft actuators were firstly investigated by the Whitesides group, to which Polygerinos belonged (Whitesides, as a matter of fact, is a co-author in [58]). PneuNets actuators have air chambers embedded in elastomers, and a strain limiting layer along their length; therefore, when pressurized air is inflated in the chambers, a bending motion occurs. A FEM analysis was used by the authors to validate the geometrical design of the actuators, and, for this purpose, different sets of parameters, including the number of PneuNets, the wall thickness, and the height of PneuNets, were examined in a number of simulations. For the glove application, an actuator with 14 PneuNets, 1 mm wall thickness, and 16 mm of height as parameters set was validated by simulations. Through experiments, a maximum bending curvature of 320 and a maximum force at the fingertip of 1.2 N with 6.89 kPa were measured.
With PneuNets actuators positioned on the dorsal side of the hand only flexion (hand closing) is actively controlled, while extension (hand opening) is passively driven, with a very limited extension torque. These torque values are not sufficient to assist patients with significant levels of spasticity in finger extension (e.g., as a result of stroke). Heung et al. in [82] present a glove with soft-elastic composite actuators (SECA) that allow active control of both bending and extension using only a single pressurizing source. The use of a single pressure source is a significant advantage versus other bidirectional soft actuation solutions, as the one proposed by Yap et al. in [67]. SECAs actuators involve an elastomer bladder reinforced with fiber wrapping, a strain-limiting layer, and a torque-compensating layer (thin rigid stainless steel elastic plates) that can facilitate both flexion and extension. The width of the torque-compensating layer can be used to fine-tune the extension performance.
Souhail and Vessakosol in [15] tested PneuNets-based soft actuators obtained with different low-cost room temperature curing silicones with high elongation properties: RTV 225 (GGC, Taiwan), RTV 4503 (GGC, Germany), and Elastosil M4600 (WACKER CHEMIE AG, Germany). From experimental tests resulted that soft actuator fabricated with Elastosil M4600, RTV 225, and RTV 4503 generates the output force at the fingertip of 1.36 N, 1.15 N, and 1.03 N and bending angles of 105, 90, and 90 at 50 kPA, respectively. The actuators fabricated with Elastosil M4600 show extra-inflation in some chamber upon pressurizing above from 30 kPa.
The soft actuators studied by Wang et al. in [83] have air chamber structure with different cross-section shapes combined with adaptive pieces to move the fingers more similarly as possible to the natural movement. The actuators internal longitudinal section shape was optimized through the comparison of three diverse chamber structures, and the internal semi-circular cavity has better performance. The authors determined the hyper-elastic constitutive model by material tensile test and analyzed the relationship between the soft actuator’s bending angle and the input air pressure.
A fishbone-inspired soft actuator for soft-gloves is presented by Jiang et al. in [84] (Figure 32D). The actuator has two-degrees of freedom, allowing independent actuation of MCP and PIP finger joints. The actuator is formed by three main elements: a silicone based soft pneumatic actuator; a 3D-printed fishbone-like structure (FLS), which is flexible but inextensible; and two nylon strings. The FLS performs the same function as the limiting layer and the fibers of a fiber-reinforced soft actuator. The strings allow the independent actuation of MCP and PIP joints, as one of them is fixed at the end of the actuator, the second in the middle and when selectively tightened different motion patterns occur. Though FEM analysis the authors studied the influence of the number of “bones” (n) on the actuator behavior and they concluded that with a n value higher or equal to 20 the radial expansion is negligible. Experimental tests found an exerted force of 11.27 N with 250 kPa as soft actuator pressure, which is similar with that obtained by fiber-reinforced soft actuators at the same pressure.
To obtain a PneuNets-based actuator with no radial expansion, Sun et al. [85] developed a soft hoop-reinforced actuator. The actuator has a semicircular section, which is considered as a preferable attribute, as it is easier to bend with less pressure [86]. The novelties of the proposed solutions are twofold: rigid hoops at the peak positions, only limiting the deformation there; and to embed non-stretchable strings in the square groove of hoop along the two sides of bottom layer. Experimental results showed that the hoop-reinforced actuator has better performance in bending motion and output force, and that the radial deformation and axial elongation are greatly limited.
Shape deposition manufacturing is the more common fabrication technique for soft actuators. The main drawbacks are high manufacturing time and the low working pressure, to not damage the actuator. Jiang et al., in [87] (Figure 32E), present a monolithic fabrication method which combines lost-wax and inverse-flow-injection (IFI) processes, obtaining not only rising fabrication efficiency but also higher working pressure and increased fatigue endurance.
Another constructive solution for a soft actuator with pneumatic jamming structure is proposed by Cao et al. in [88]. The actuator is formed by three main layers: a fiber-reinforced, a deformable, and a granular jamming layer, in this order from the outside to the inside. In the axial position, the jamming layer vacuum pressure can be controlled, thereby changing the fluid–solid state of the filled particles and controlling the stiffness of the entire actuator. In the deformable layer, three chambers forming 120 with each other are embedded, and the bottom of each air chamber is connected with an air pipe. Different directions and degrees of bending can be achieved by controlling input pressure in the chambers. Externally, the fiber reinforced layer limits the radial expansion. The main advantages of this constructive solution are high relative pressures (up to 200 kPa) and forces (maximum output force of 5.7 N), to the disadvantage of the bending angle which reaches 138.
FPAs is a completely different class of soft actuators, distinguished by lightweight, compliance, and inherently anisotropy portability, making them promising for the development of SPAs. Several variants have also been proposed within this class of soft actuators. The main drawbacks are low output force and high failure rate. Feng et al., in [89], try to overcome the force limitation through high-force FPAs (HFFPAs) with asymmetric chambers and interference-reinforced structure. The design is based on a corrugated structure and anisotropy. Three layers of textiles form the actuator: first and second layers form chambers which are then corrugated on the constrained third layer with pads introduced on adjacent-pleat surfaces. The chambers pressurization causes the FPA bending due to orthogonal arrangement of knitted textiles. The HFFPA chamber geometry and the interference (i.e., contact) between the adjacent-pleat surfaces of the corrugated structure and determines the tip blocked force. With semi-circular pads at 150 kPa the mean tip blocked force of HFFPAs resulted 13.46 N higher compared to the one obtained through FPAs.
Figure 32.
Soft glove actuation solutions. (A) Whitesides group design based PneuNets soft actuators, simulated with FEM analysis and experimentally studied. Reprinted/adapted with permission from Ref. [58]. 2013, IEEE. (B) FPAs based glove which assists the thumb abduction and fingers flexion and extension [31]. (C) FPAs actuators which actively assists fingers flexion and extension [90]. Reprinted/adapted with permission from Ref. [90]. 2019, IEEE. Letters (a–g) refer to the original source. (D) Fishbone-inspired soft actuator for soft-gloves presented by Jiang et al. in [84]. Reprinted/adapted with permission from Ref. [84]. 2018, IEEE. (E) Soft actuators monolithic fabrication method which combines lost-wax and inverse-flow-injection (IFI) [87]. Reprinted/adapted with permission from Ref. [87]. 2017, IEEE.
Figure 32.
Soft glove actuation solutions. (A) Whitesides group design based PneuNets soft actuators, simulated with FEM analysis and experimentally studied. Reprinted/adapted with permission from Ref. [58]. 2013, IEEE. (B) FPAs based glove which assists the thumb abduction and fingers flexion and extension [31]. (C) FPAs actuators which actively assists fingers flexion and extension [90]. Reprinted/adapted with permission from Ref. [90]. 2019, IEEE. Letters (a–g) refer to the original source. (D) Fishbone-inspired soft actuator for soft-gloves presented by Jiang et al. in [84]. Reprinted/adapted with permission from Ref. [84]. 2018, IEEE. (E) Soft actuators monolithic fabrication method which combines lost-wax and inverse-flow-injection (IFI) [87]. Reprinted/adapted with permission from Ref. [87]. 2017, IEEE.

A different FPA structure is presented by Nassour in [90]. This textile-based actuation solution (Figure 32C) is composed by two parts, a flexor actuator enfolded in an extensor actuator, therefore it allows the active actuation of both flexion and extension. The actuators are formed by a fabric sleeve that hosts a bladder tube. Bladder tubes host elastic spiral nylon threads to overcome the air jamming problem caused by the folding. A wearable glove with five of these actuators is able to hold 9 kg weights.
Ge et al., in [51], propose a FPAs-based glove which assists the thumb abduction and fingers flexion and extension, with textile fabrics (which provides anisotropic mechanical properties) coated with thermoplastic polyurethane (TPU) film (to prevent air leakage). The thumb-abduction FPA is formed by two woven fabric layers, with warp direction aligned with the thumb abduction direction, and a spacer in between made of neoprene sponge to allow fluent airflow. An abduction angle equal to 50.5 was experimentally measured. The finger-extension FPA is obtained by using the same approach as that of the thumb-abduction FPA, but by aligning the warp direction of the fabric with the length direction of the actuator. FPAs usually have a two-layer structure; this design choice allows high bending angles but quite high input pressure is required (up to 200 kPa), with safety issues in the human–glove interaction, as well as power source weight and dimension. To minimize the required input pressure, the authors designed a structure in which the chambers are folded to form a bellow structure and the folded chamber is welded onto a third limiting layer.
Some authors propose actuators with a hybrid structure, combining a silicon part (casted in a 3D-made mold) with elastic knitted fabric. In [51], authors developed a glove with soft fingers formed by an inner layer made of silica gel externally wrapped by composite elastic knitted fabric. The outer textile sheath is composite by different parts to make the soft finger structure a combination of phalanges and joints, similarly to human fingers (as visible in (Figure 32B). The fabric used for phalanges does not allow either elongation nor expansion in the latitudinal direction, while that chosen for joints allows elongation. Furthermore, through the different shape variables of the fabric layer material of the bottom and back of the finger, the soft finger can realize the joint bending action.
Luo et al., in [91], propose a pneumatic soft actuator formed by a thin-wall silicone tube wrapped by knitted sheath with elastic stitches to construct non-homogeneous knitting structures. The entire knitted structure is fabricated automatically in a single machine run.
Takahashi et al. investigated fingers motion actuation through thin pneumatic artificial muscles (TPAMs) [61]. By supplying air pressure TPAMs generate contraction force, as shown in Figure 33B. Therefore, if TPAMs are on the back side of the hand, fingers are extended by air pressure supply, and, if they are on the palm, flexion occurs. The authors used muscles of approximately 2.5 mm, which have a contraction rate of about 27%. The very limited size of these actuators allows the different degrees of freedom of the fingers to be operated independently.
As already highlighted, the 27% of the reviewed soft gloves has a tendon-driven actuation, of which 3% combines tendon-driven and pneumatic systems. The distribution of the tendon type is represented in the pie diagram of Figure 34. There is no clear prevalence in the use or Bowden cables of wires, while there is a significant percentage of gloves that adopt particular solutions.
A wire-based solution is proposed by Mohammadi et al. in [41] (Figure 33A). This constructive solution has two main strengths: a cable motion transmission system based on rotating spools, which can be used to perform both flexion and extension of the finger with a single motor and the realization in 3D printing, in TPU, of the entire structural part of the glove. Micro-DC motors were used and two spools are connected to a single motor shaft to have two cables moving in opposite directions wound upon them; one cable flexes the fingers from the palmar face, whilst the other extends the fingers from the dorsal face.
Some authors, such as Terrile et al. [92], developed gloves actuated with shape memory alloy (SMA). The glove presented in [92] is a haptic soft glove for kinesthetic perception with two fingers actuated by SMA springs, generating in the user the sensation of holding an object (Figure 33C). It was tested on the simulation of three different forces (100, 200, and 300 g) obtaining good results. Furthermore, stretch sensors, providing the tension in the SMA-sensor assembly, were used to develop a closed-loop control of the actuators.
4.3. Soft Gloves Control
Soft gloves control can be implemented with different solutions. Figure 35 reports the distribution of the control technique found in the analyzed gloves. Most of the documents fall in the model-based methods category (16 papers, 33%), whereas control strategies based on EMG signals assessment follow with 11 documents (22%). Deep learning techniques and ANNs [56,57] achieve, instead, 8% of the total amount of analyzed documents.
The inherent compliance of soft-gloves leads to a trade-off between control precision, material flexibility, and lightness. Machine learning algorithms are sometimes used to control these devices, based on a force feedback obtained by measuring EMG signals, as in [53]. In that work, the authors developed a soft wearable glove driven by an intent detection system based upon machine learning applied to muscle activity enrolled in a closed-loop architecture. The control architecture comprised a high-level controller and a low-level admittance controller. The high-level controller estimates the motion intent, therefore computing the set-point for the low-level controller, and for the former two machine learning methods were compared by the authors: Ridge Regression Algorithm and Random Fourier Features Algorithm. Results showed that Ridge Regression Algorithm with no kernel would be preferable to RFF due to its reduced complexity and vulnerability to overfitting.
A different use of sEMG signals in the control of a semi-soft assistive glove (SAG) is presented by Kaneishi et al. in [93] (Figure 36A). The hybrid control method proposed for active assistive is formed by a primary control interface which detects the user’s wrist extension to assist grasping using a bending sensor located on the wrist of the hang with the glove, and a secondary interface with sEMG sensor positioned on the other arm, which enables the user to activate or deactivate the function of the primary interface to respond to several situations. The algorithm developed for these hybrid interfaces is based on a finite state machine.
A deep neural network (DNN) based control is proposed by Ha et al. in [94]. To train a soft glove position network (SGPN), they use the pressure detected in the pneumatic actuators and position data of the soft glove (using a Leap Motion sensor). The developed control enables open-loop control on the joint positions of the soft glove by supplying pressure to the actuator without knowledge of the predefined model, such as wearer’s hand size or glove model.
The air source is a significant limit of pneumatic soft gloves for at home use. A compact pneumatic source combined with a valveless circuit for bending actuators in a soft glove is proposed by Ahmadjou et al. [95]. Two series of serially connected low-cost commercially available micro-compressors are used to provide additional pressure and flowrate in two directions. With two micro-compressors, the pressure of a closed-loop circuit could rise to the maximum pressure of 160 kPa. A two-level controller is implemented: the inner-loop controller controls the output characteristics of the source while the outer-loop controller handles the trajectory tracking of the angular position.
Figure 36.
Soft glove control solutions. (A) Hybrid control method for a Semi-soft Assistive Glove (SAG) [93]. Reprinted/adapted with permission from Ref. [93]. 2019, IEEE. (B) Control of mobile four wheels robots through a soft glove [96]. Reprinted/adapted with permission from Ref. [96]. 2018, IEEE.
Figure 36.
Soft glove control solutions. (A) Hybrid control method for a Semi-soft Assistive Glove (SAG) [93]. Reprinted/adapted with permission from Ref. [93]. 2019, IEEE. (B) Control of mobile four wheels robots through a soft glove [96]. Reprinted/adapted with permission from Ref. [96]. 2018, IEEE.

The control of mobile robots is another possible use of a soft glove. Sadeghian et al. [96] presented a four-wheeled robot (Figure 36B), controlled through the signals of flex sensors, an IMU, and a resistive force sensor (FSR) positioned on a soft robotic glove. Four ultrasonic sensors for obstacle avoidance are positioned on the mobile robot, and a fuzzy logic based approach is used to improve obstacle avoidance during self-navigation.
4.4. Clinical Studies or Trials
Among the 126 selected documents, 16 works have been classified as clinical-related studies, and 4 (25%) have been published in 2020. Most of the documents describe preliminary evaluations, feasibility studies, or pilot cases, such as the works of Radder et al. [97,98,99,100], Prange-Lasonder et al. [101], Osuagwu et al. [102,103], Nuckols et al. [104], Jiryaei et al. [24], and Kottink et al. [105]. The described devices are dedicated to different kind of users, such as: elderly people with [97] or without impaired hand function [106], after-stroke [100,101,104,107,108] or multiple sclerosis patients [109], and subjects affected by chronic incomplete tetraplegia [102], quadriplegia [24], or spinal cord injury [39,103,110].
Although all the documents involve the use of soft gloves, the strong differences and peculiarities of the investigated populations demand for dedicated experimental designs, which translate into hardly comparable studies, with different outcomes and protocols. For instance, Kottink et al. [105] test the assistive soft glove Carbonhand on 13 subjects with decreased handgrip strength for six weeks, to check for the therapeutic effects of using the device as support in gripping tasks of ADLs. The analyzed patients are affected by different kind of pathologies, both orthopedic and neurological, but defined as chronic patients, or in a stable phase of the disease. The intervention is performed at home, and the subjects are asked to use the device for at least 180 min a week during common ADLs, freely chosen by the subjects. Primary outcome measure of the study is the grip strength, whereas a subset of identified secondary outcomes is presented in the paper, e.g., support from glove and ease of use. The use of the glove proves to significantly improve the grip strength, and the user experience is positive. Nasrallah et al. [108] focus instead on stroke survivors, and aim at investigating the physiological changes underlying the soft-robotic-assisted training to improve motor function in the recovery process. Nine subjects with hemiplegic upper limb are assessed with functional magnetic resonance imaging (fMRI) in resting-state, and in both active and assisted motor-tasks. The tasks are performed in bilateral and monolateral (affected) hand, and evaluations are performed before and after a 30 min treatment of robotic continuous passive motion (CPM). Different results emerge depending on the use of affected limb only or both the arms: in bilateral condition, the activation of primary and supplementary motor areas increases after CPM, unlike the unilateral case. To the authors, these results could suggest that the unaffected hemisphere might supplement damaged neural networks in the affected hemisphere, reconfiguring connectivity. In addition, Correia et al. [108] demonstrate the effectiveness of a fabric soft glove in improving the independent performance of 11 subjects affected by hand paralysis from spinal cord injury (SCI), in the ADLs. In particular, higher benefit seems to be obtained by the subjects presenting more severe impairments. Range of motion, powered glove grasp and pinch strength significantly improve, but further investigation are suggested by the authors toward different populations, such as muscular dystrophy or stroke. Post-stroke subjects and patients affected by chronic spinal cord injury are also evaluated by Nuckols et al. [104] and Osuagwu et al. [103], respectively, with pilot studies investigating the possibility of using soft gloves in home-based rehabiliation. Both the works reveal positive and encouraging results.
In this heterogeneous context, Table 3 provides a general literature overview, collecting the main methodological characteristics of these analyzed clinical papers. Focusing on the measurement protocols, different clinical scales, tests or functional tasks are investigated to assess the subject condition, such as Modified Ashworth Scale (MAS) and Bartel Index (BI), or Toronto Rehabilitation Institute Hand Function Test (TRI-HFT), and various reaching tasks. Nonetheless, the upper extremity Fugl–Meyer assessment (FM) and Jebsen–Taylor Hand Function Test (JTHFT) are commonly adopted in several studies. According to the same rationale, most of the works provides the assessment of the forces produced by the user, and, in particular, of the maximal pinch and handgrip strength, typically with flexible pressure sensor mats or dynamometers. Given the different aims of the studies, the variability in primary and secondary outcomes is not surprising, although the main goal seems to remain the quantification of the functionality, and the range of motion (ROM) is mainly assessed in terms of angles at the phalangeal joints. On the contrary, the shared attention to the concept of device usability by the final user could be considered unexpected in such a heterogeneous context; nonetheless, nine works face usability and acceptance in terms of more or less structured questionnaires, and four of them explicitly refer to the System Usability Scale (SUS). On the other hand, only one paper [110] analyzes the setup time, defined as time required to don and doff the device, and keeping track of whether or not the subject needed assistance in the operations.

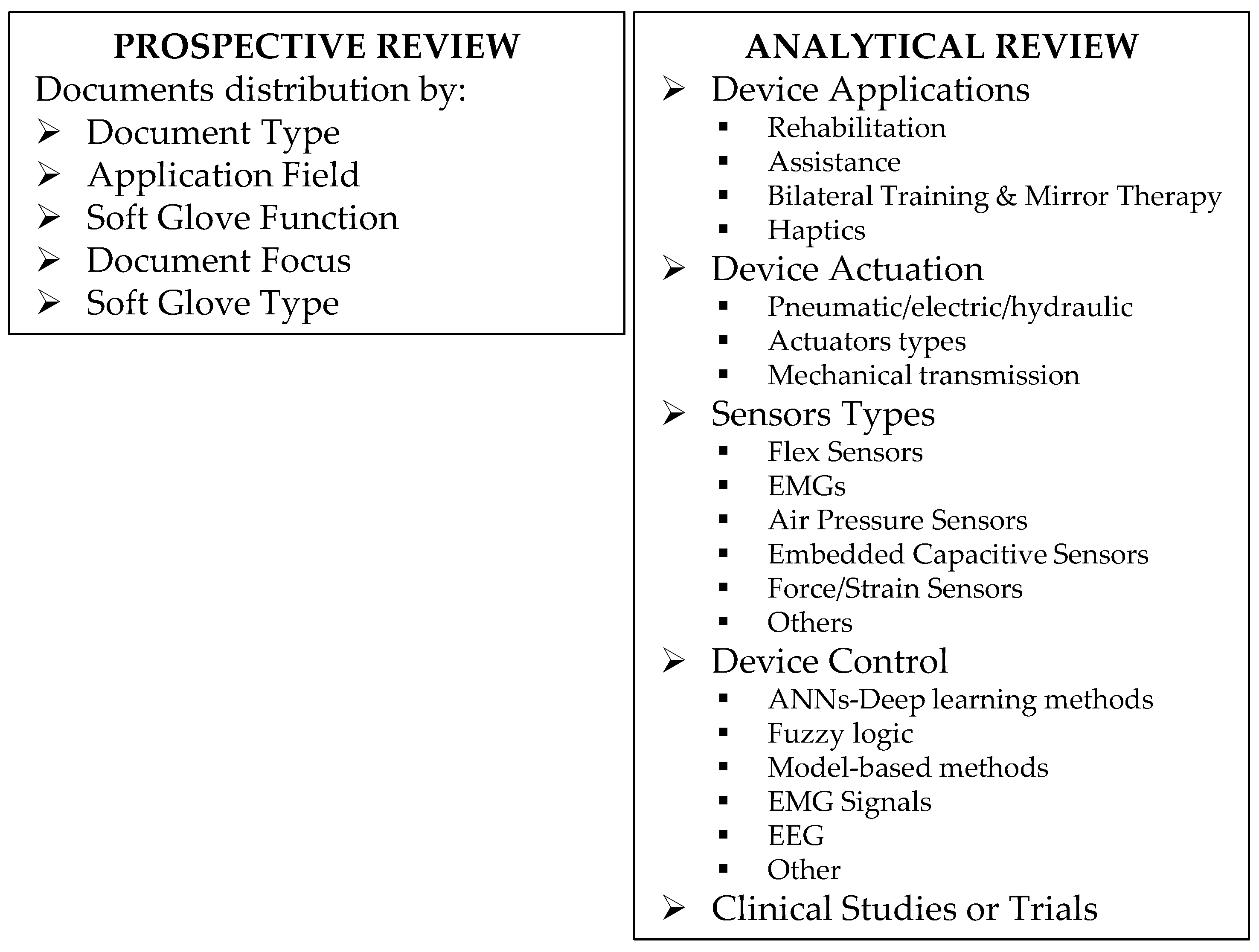{kind=link}
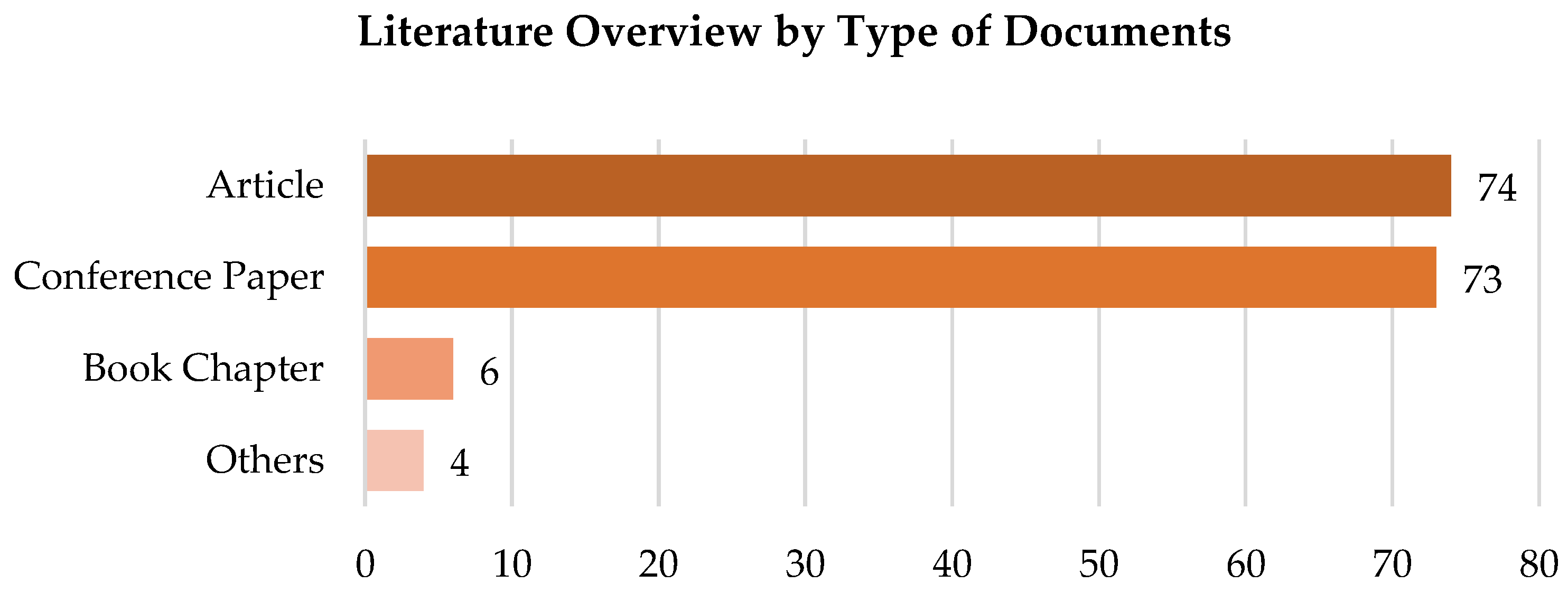{kind=link}
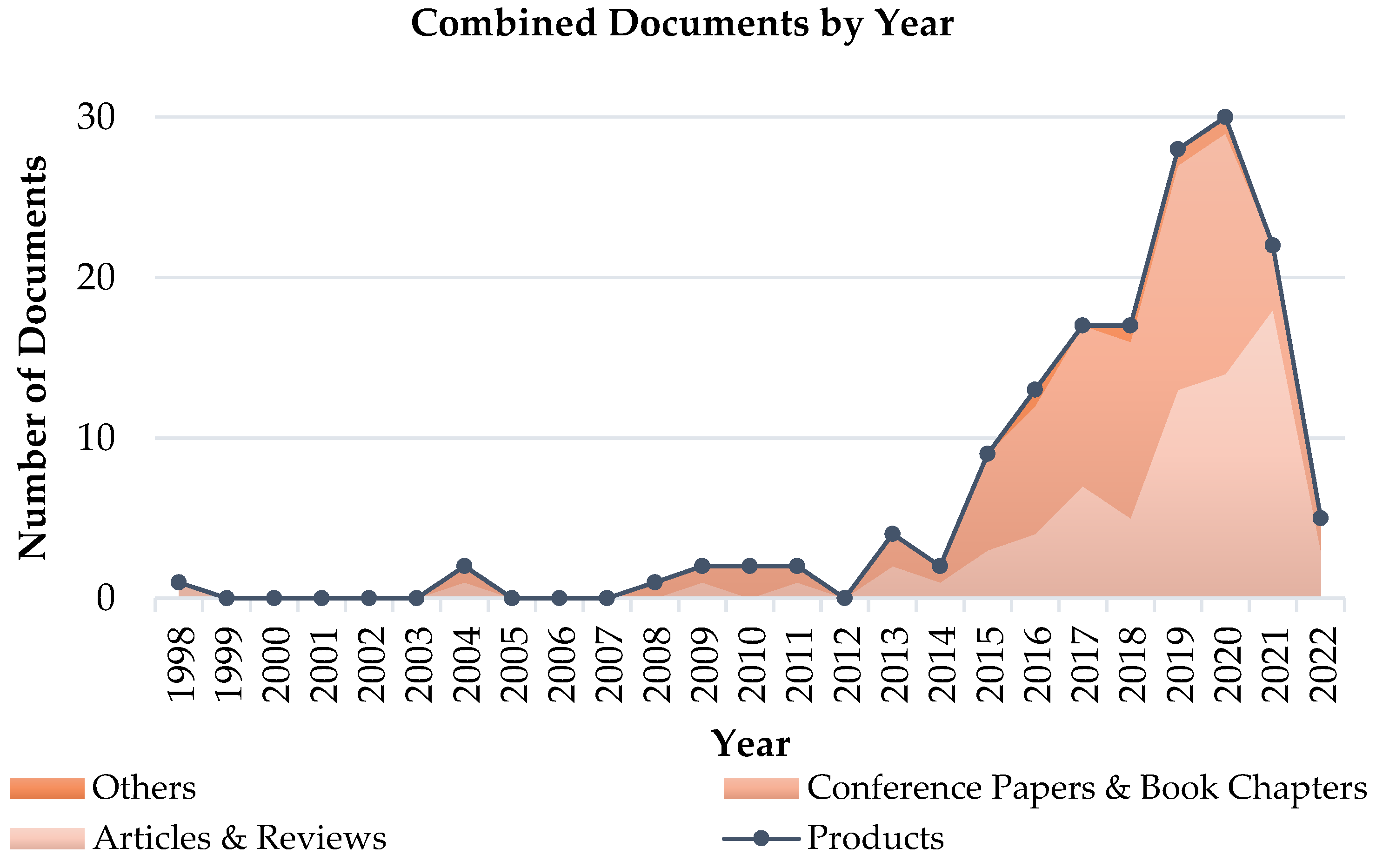{kind=link}
{kind=link}
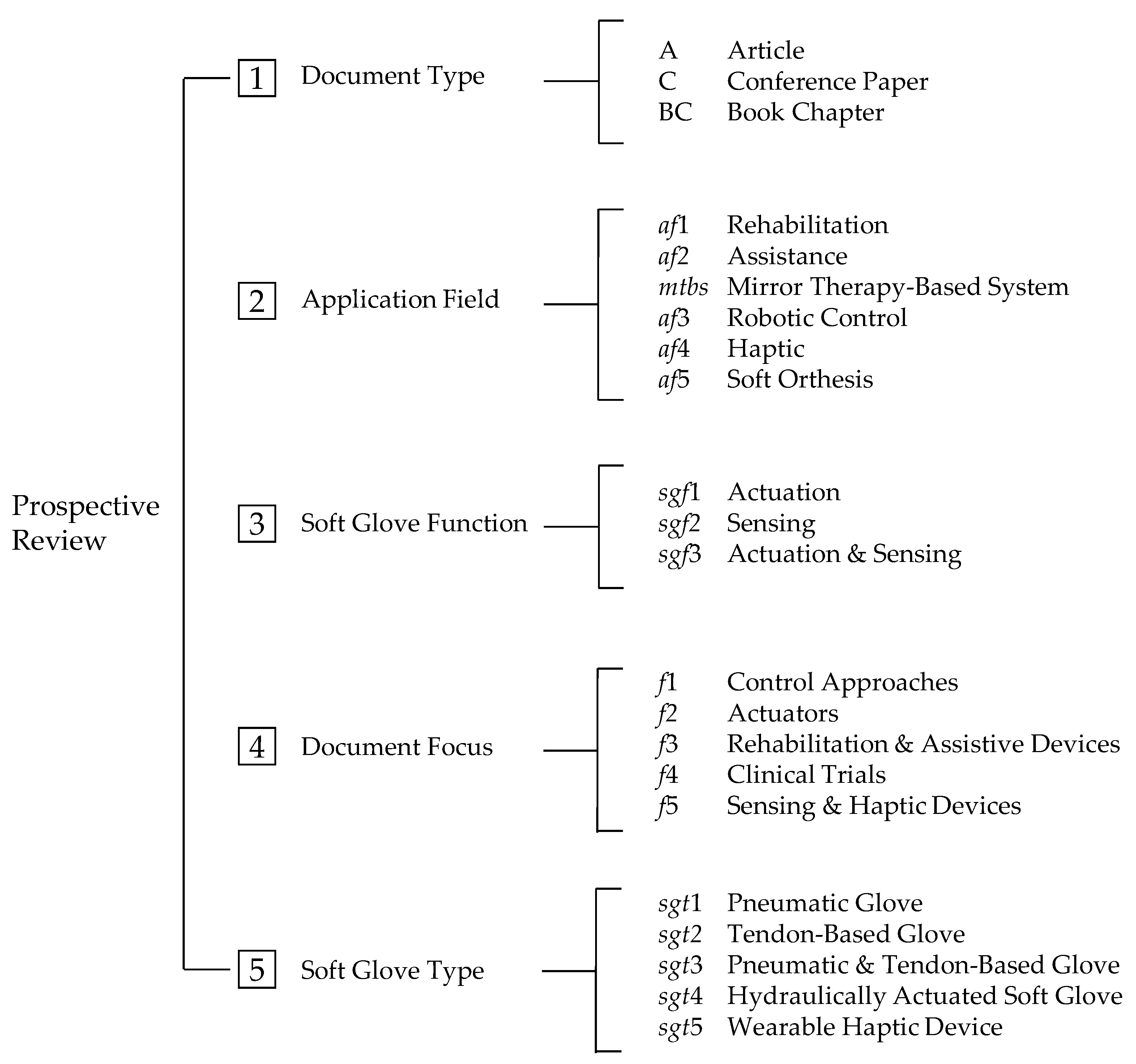{kind=link}
{kind=link}
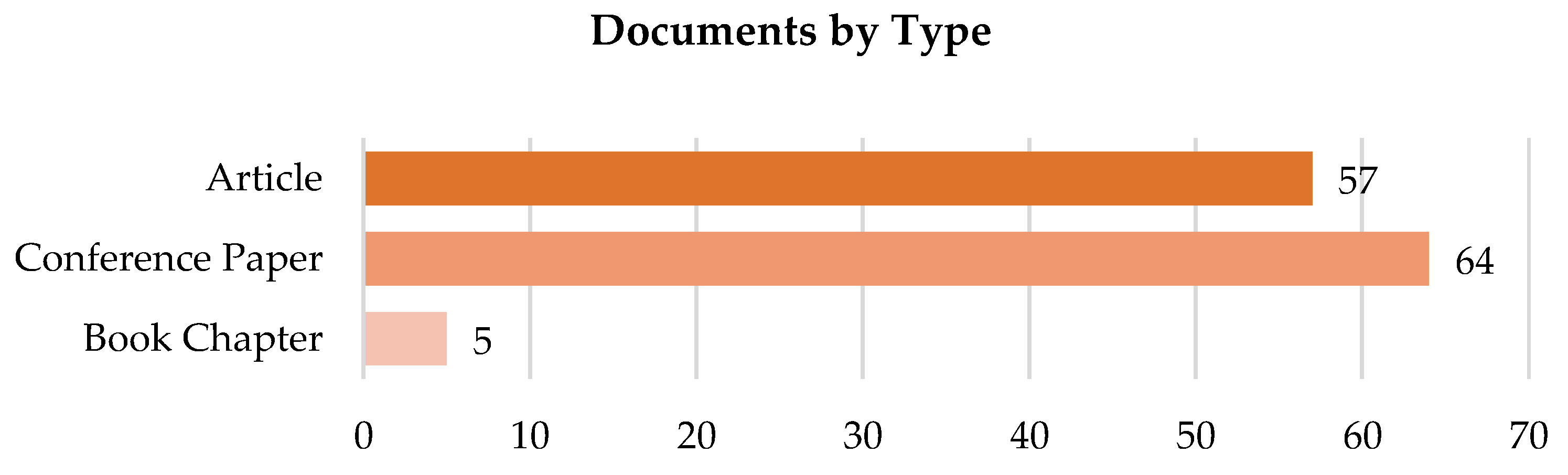{kind=link}
{kind=link}
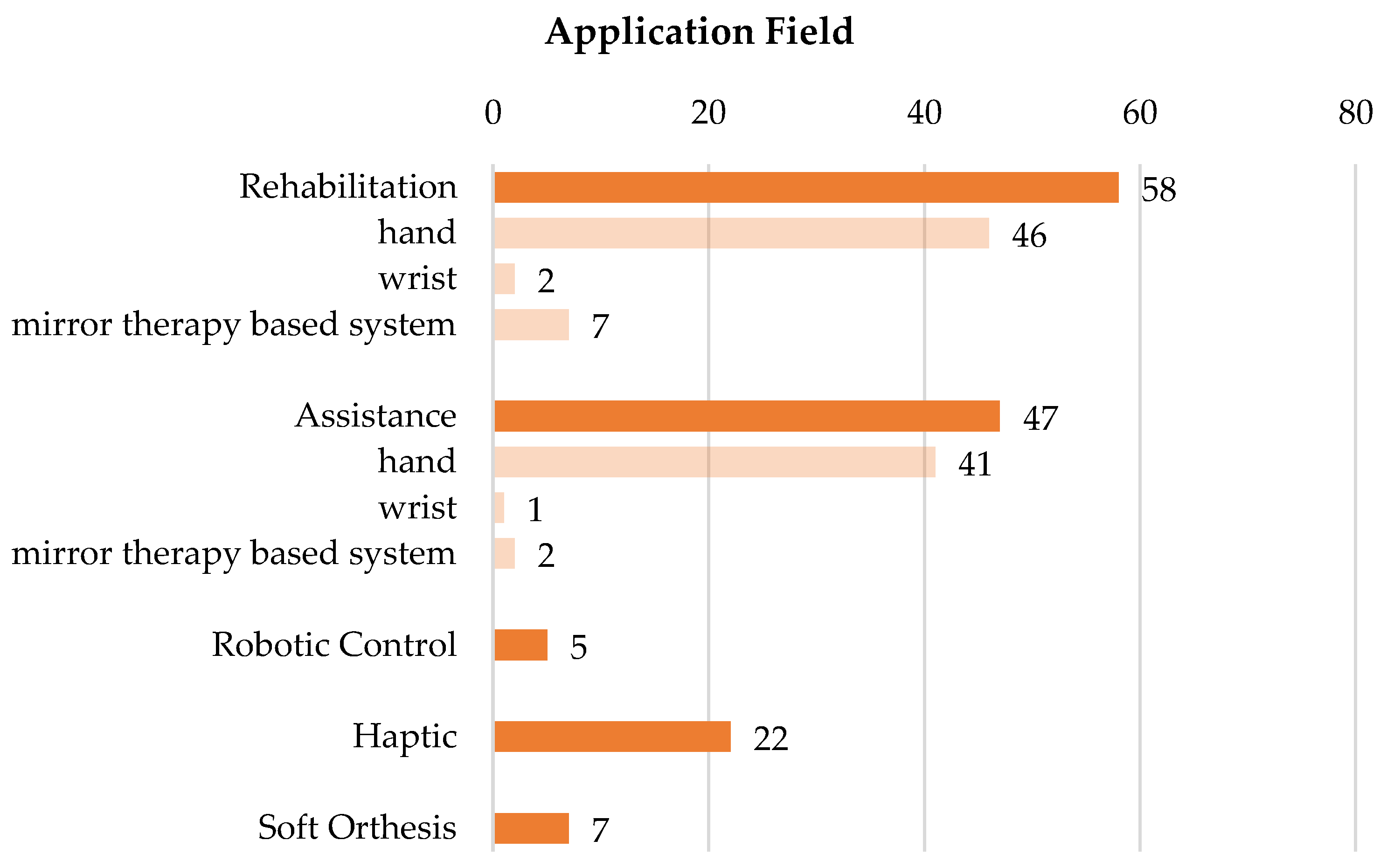{kind=link}
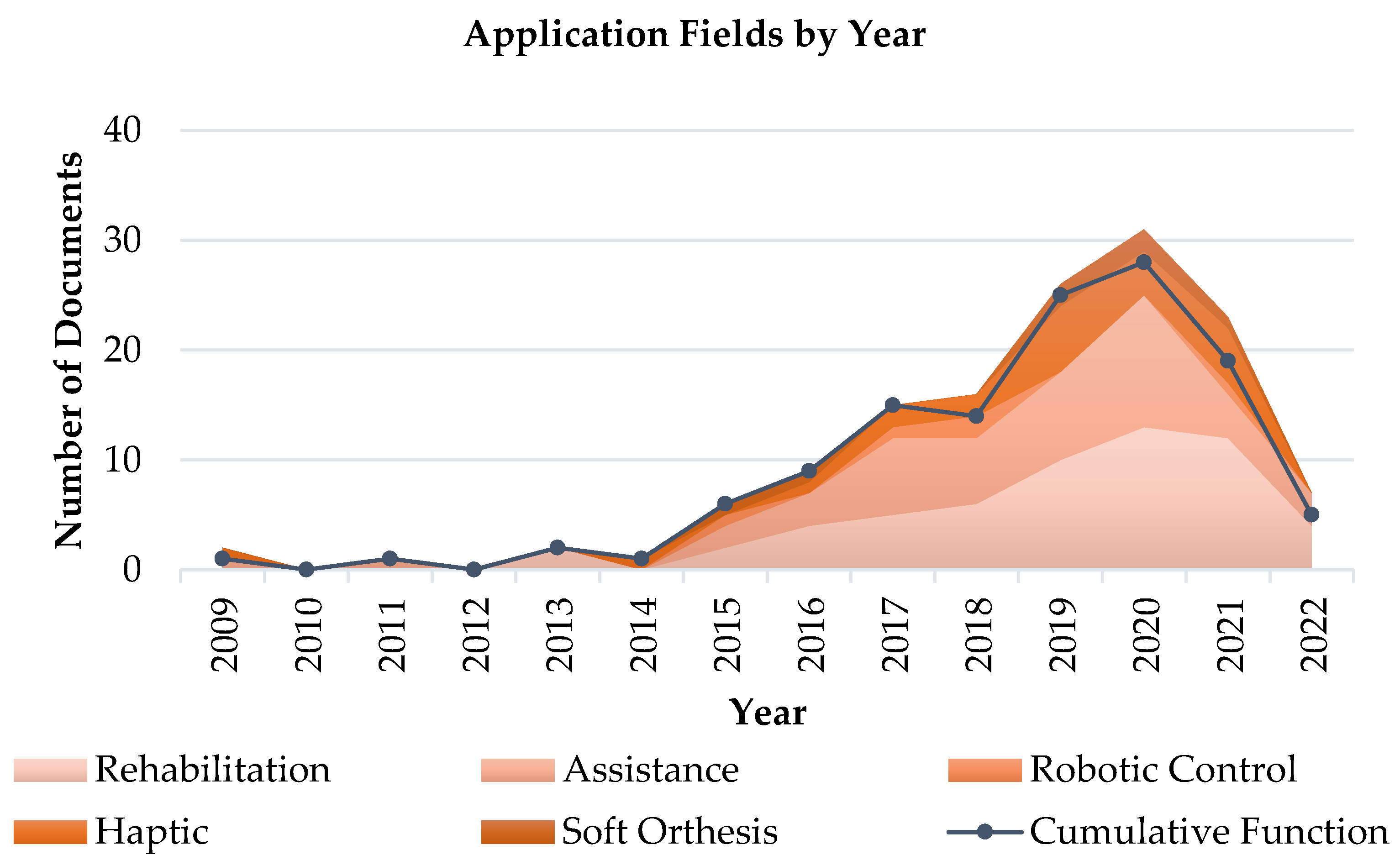{kind=link}
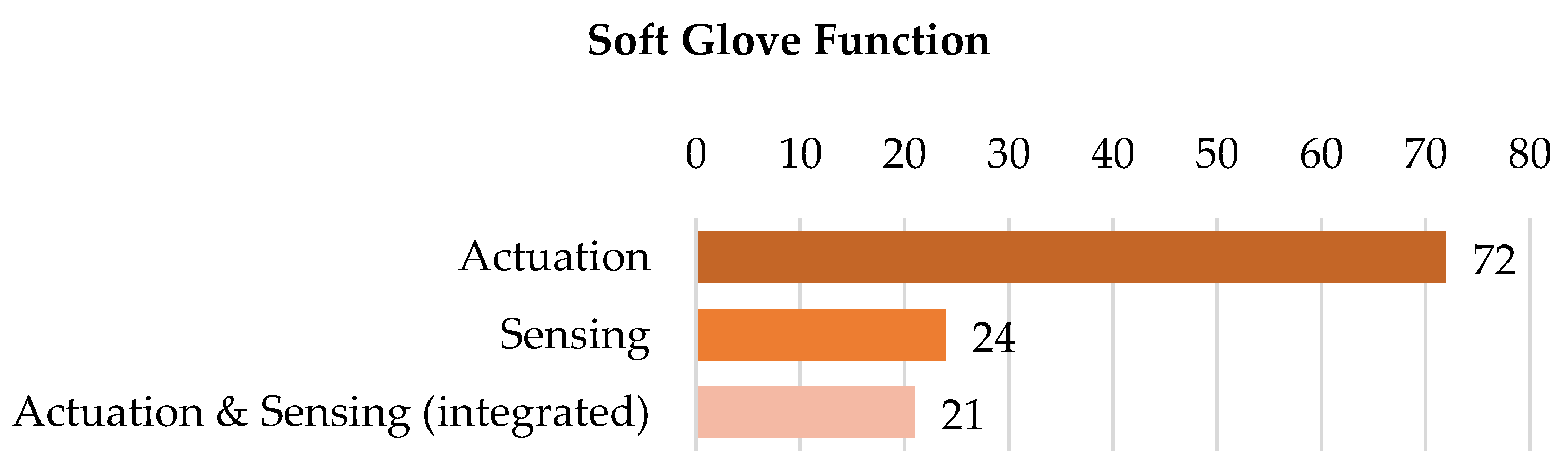{kind=link}
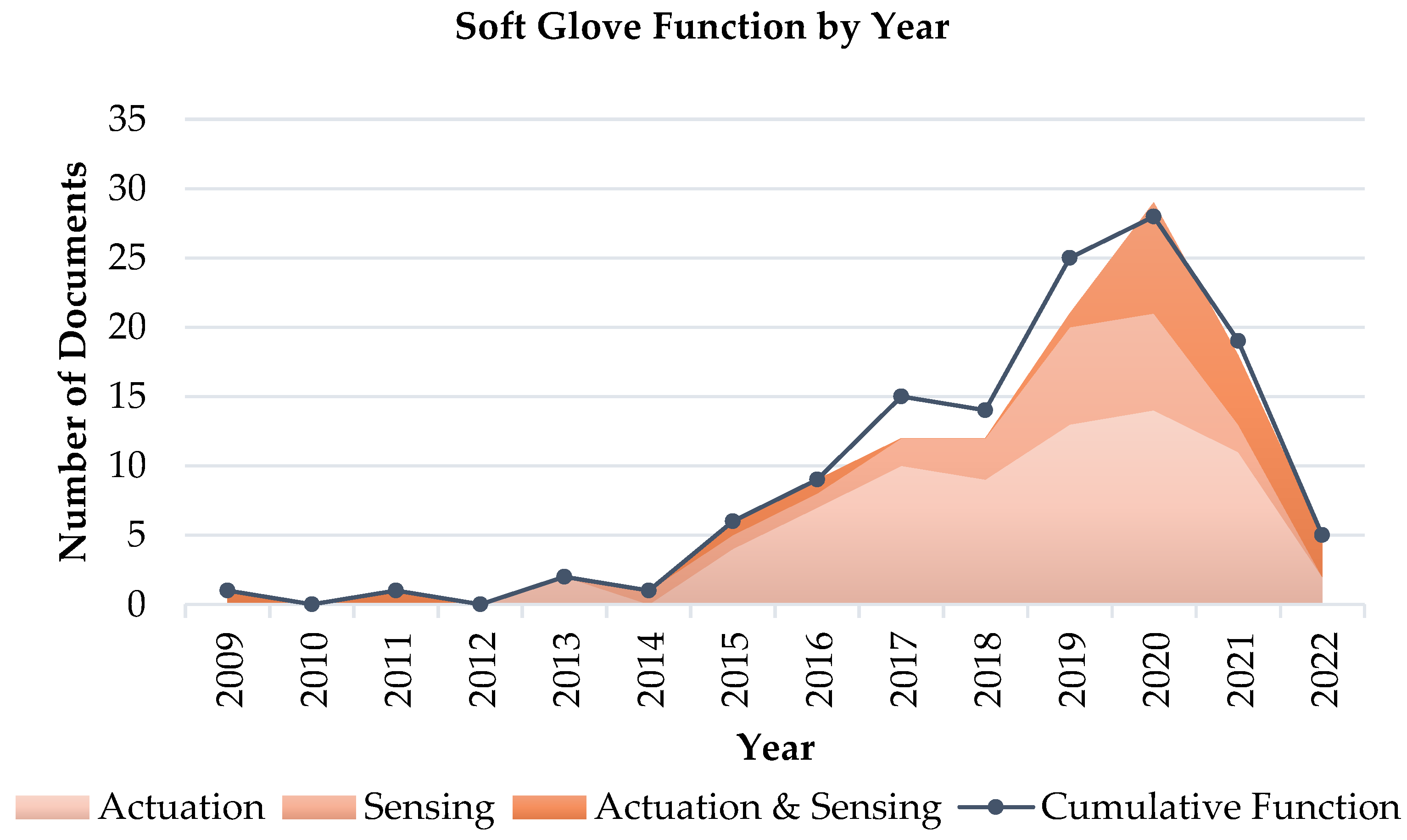{kind=link}
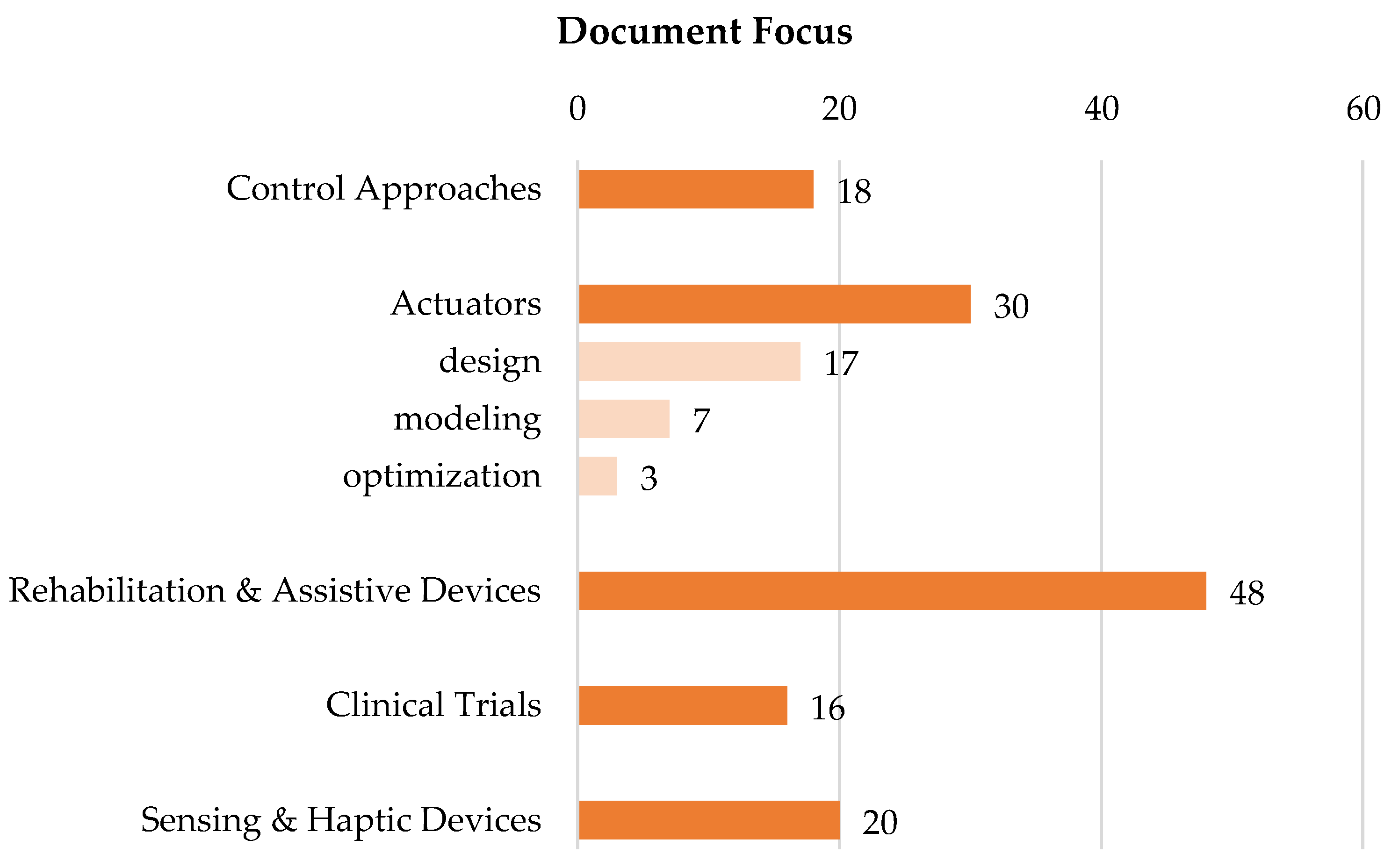{kind=link}
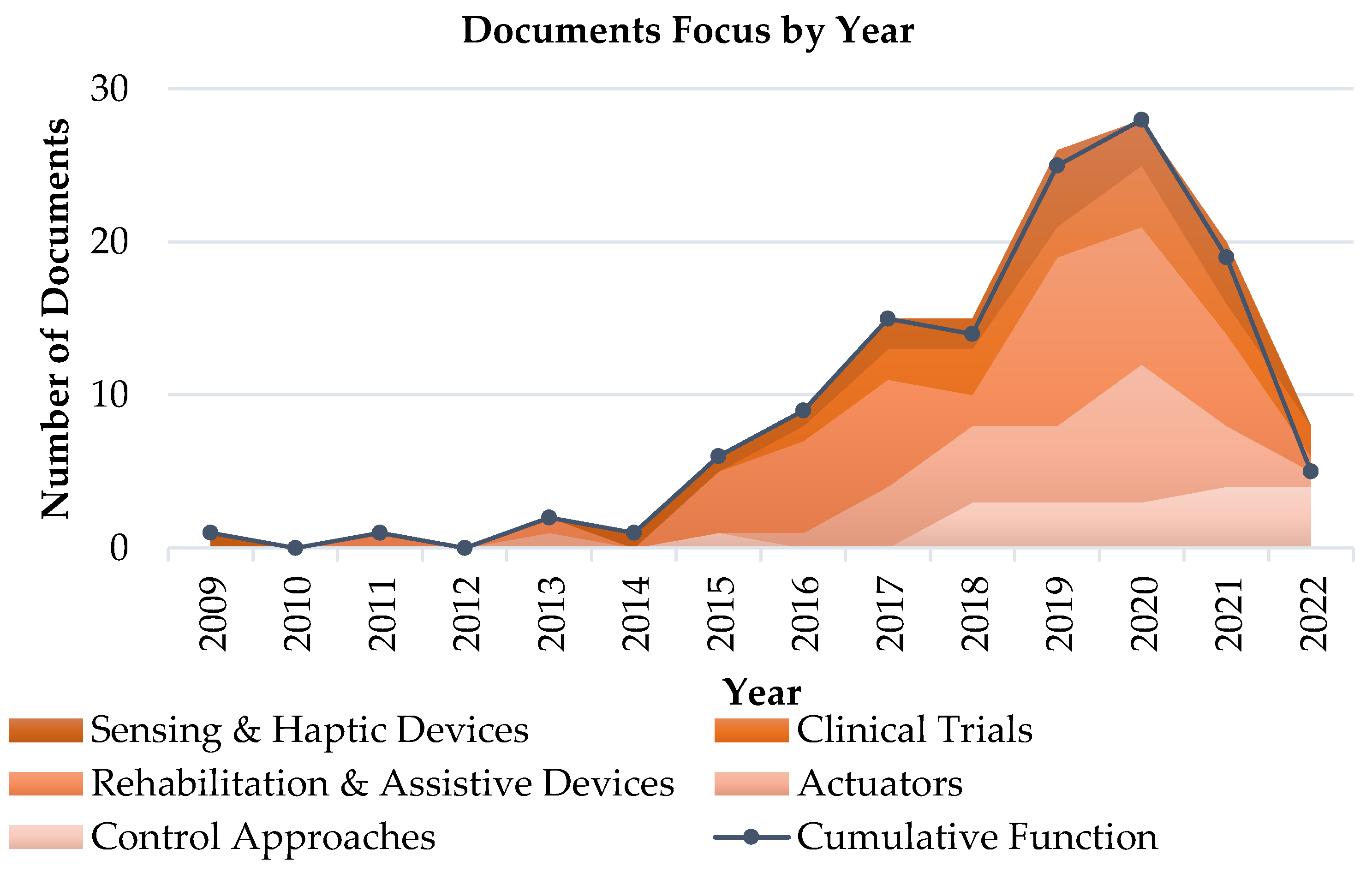{kind=link}
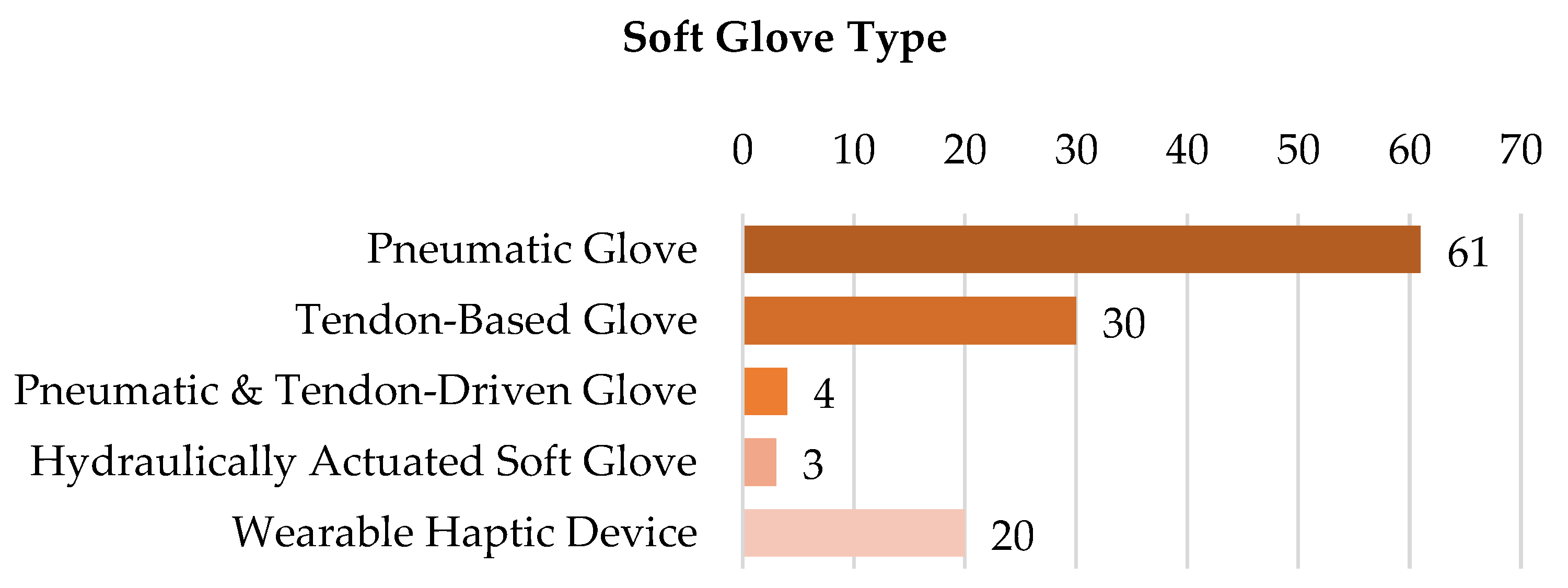{kind=link}
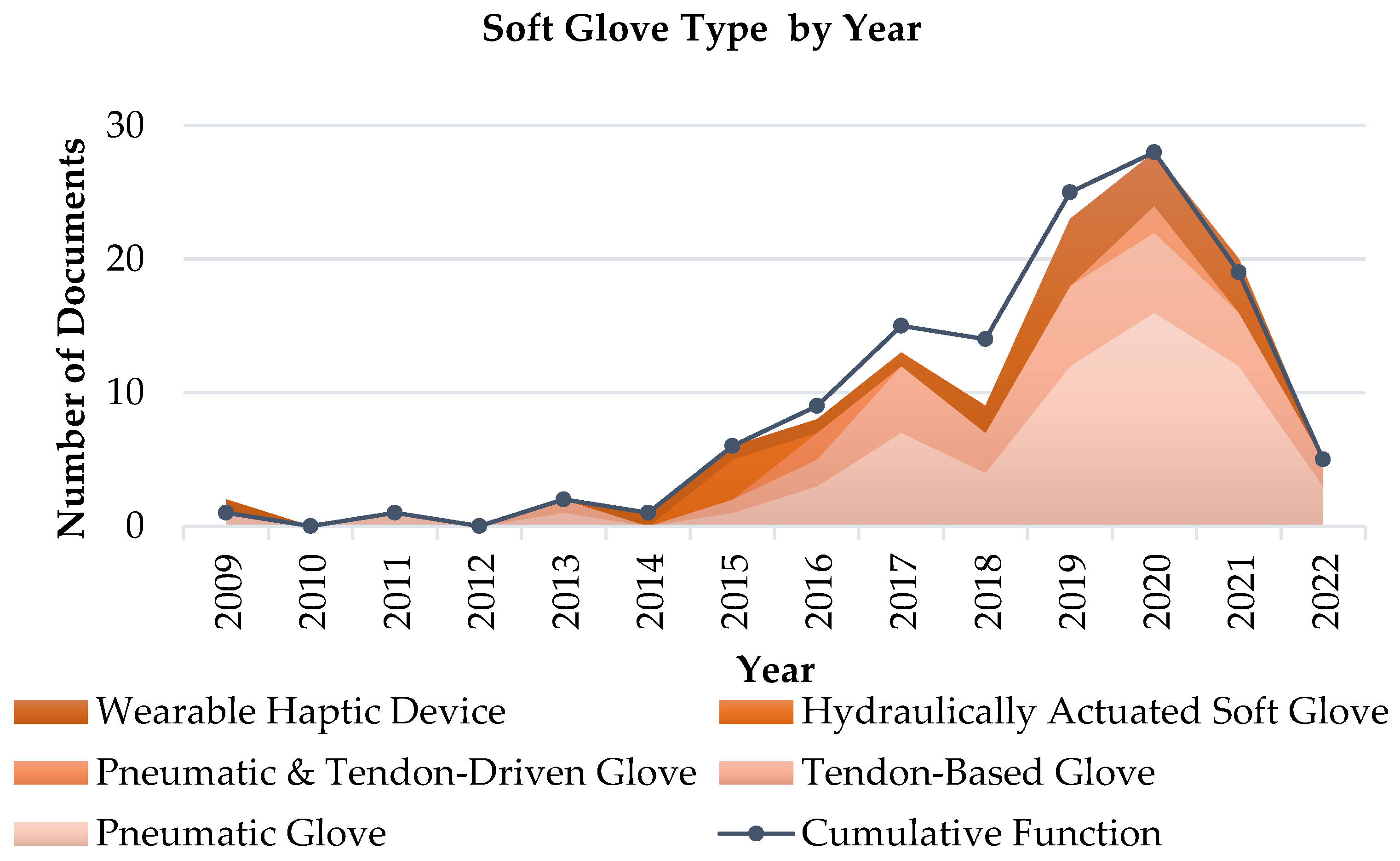{kind=link}
{kind=link}
{kind=link}
{kind=link}
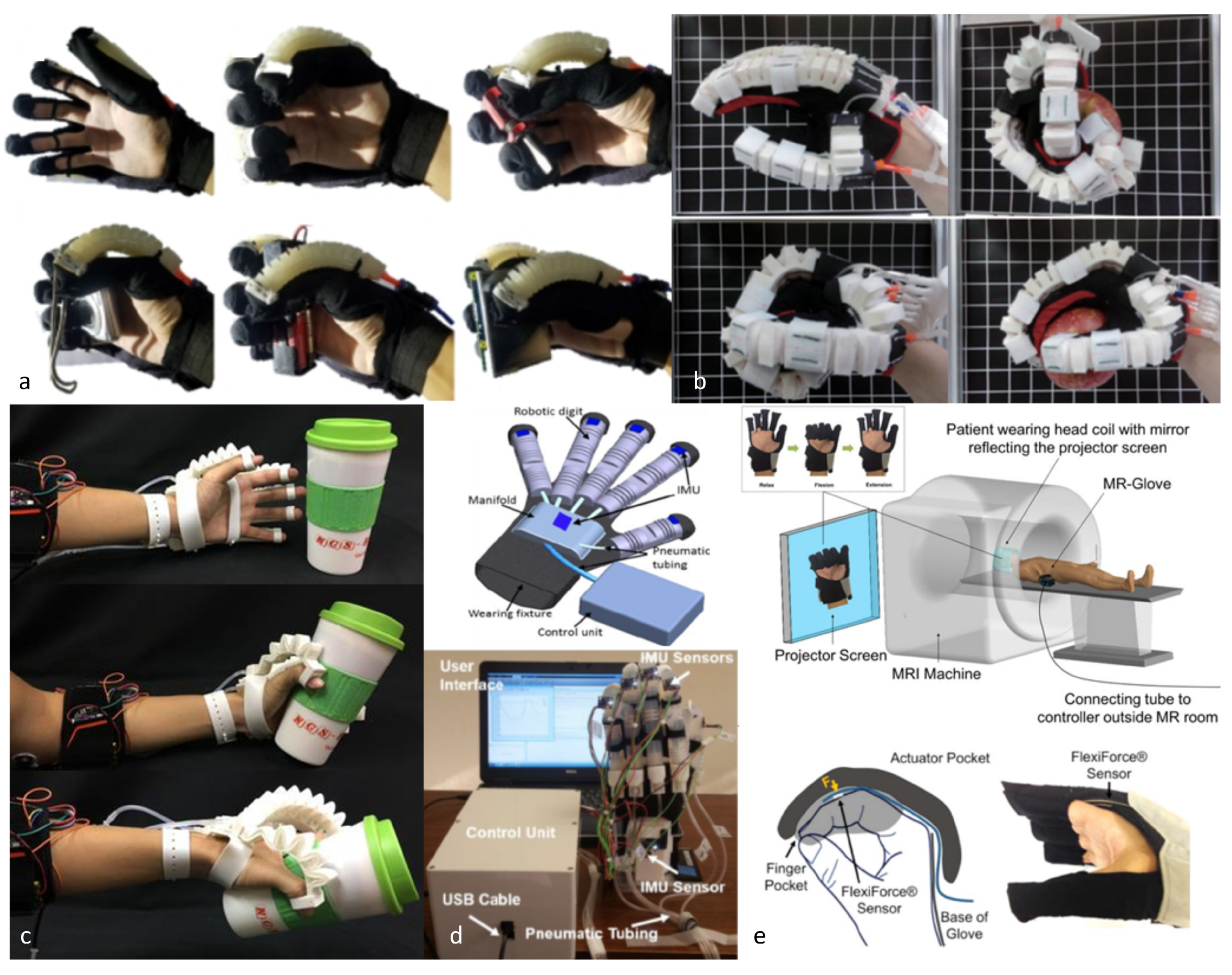{kind=link}
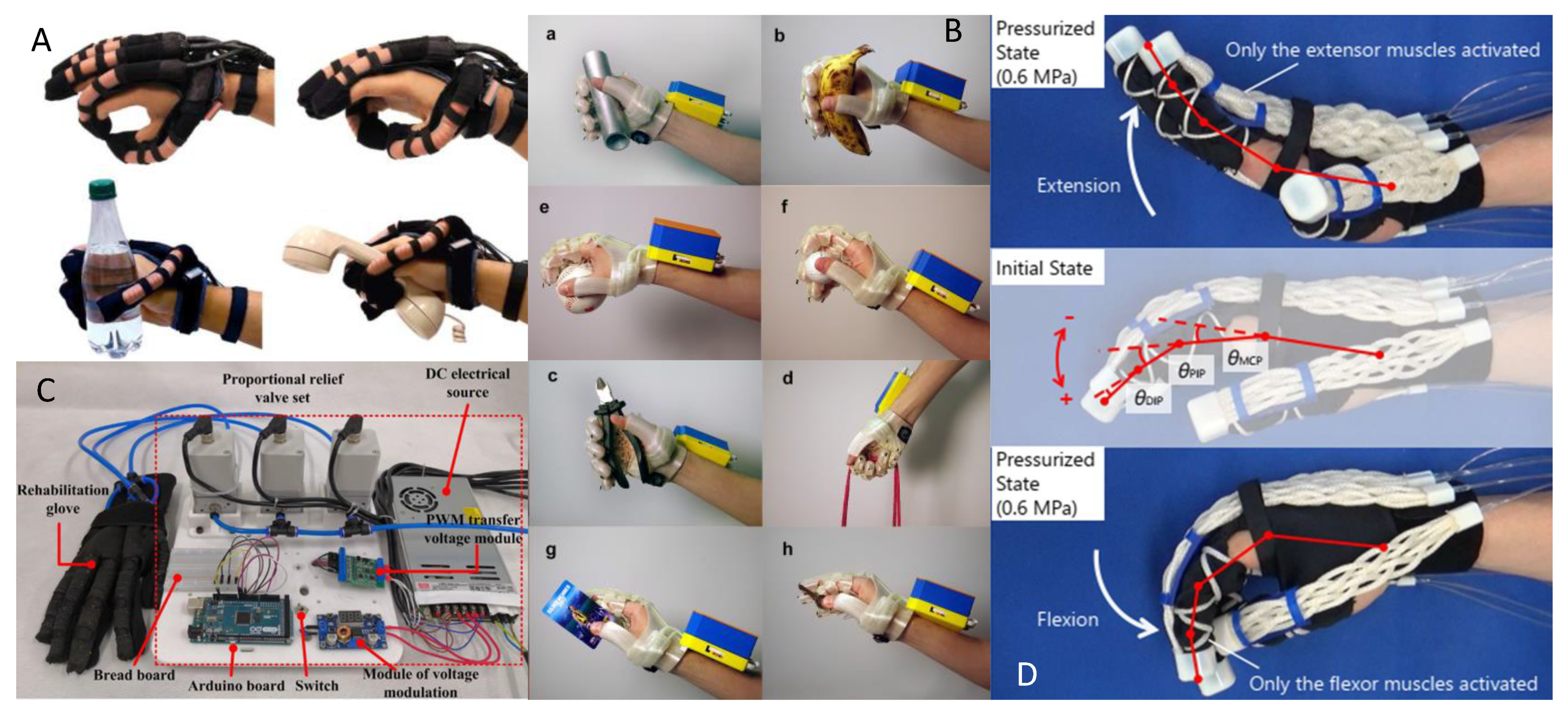{kind=link}
{kind=link}
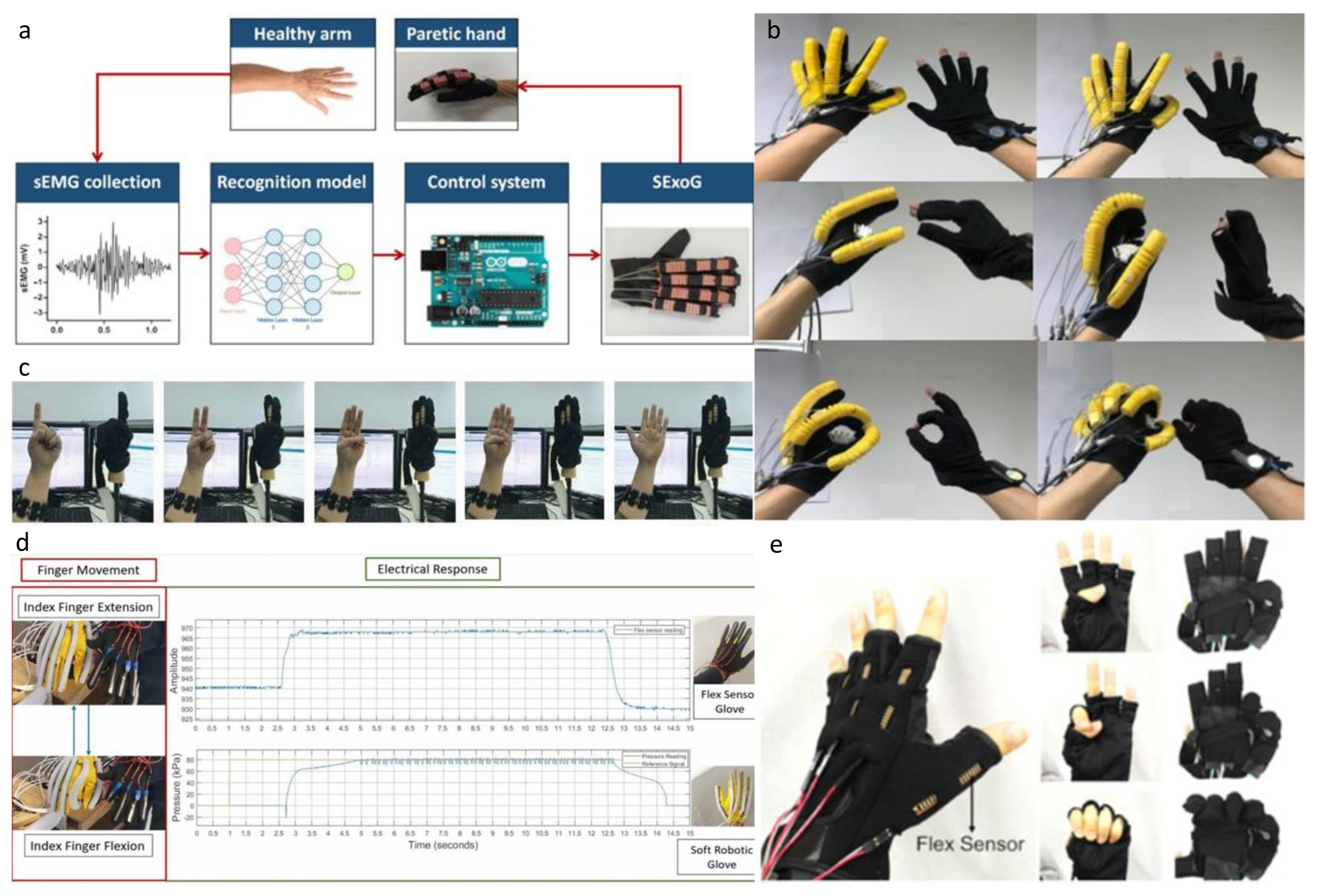{kind=link}
{kind=link}
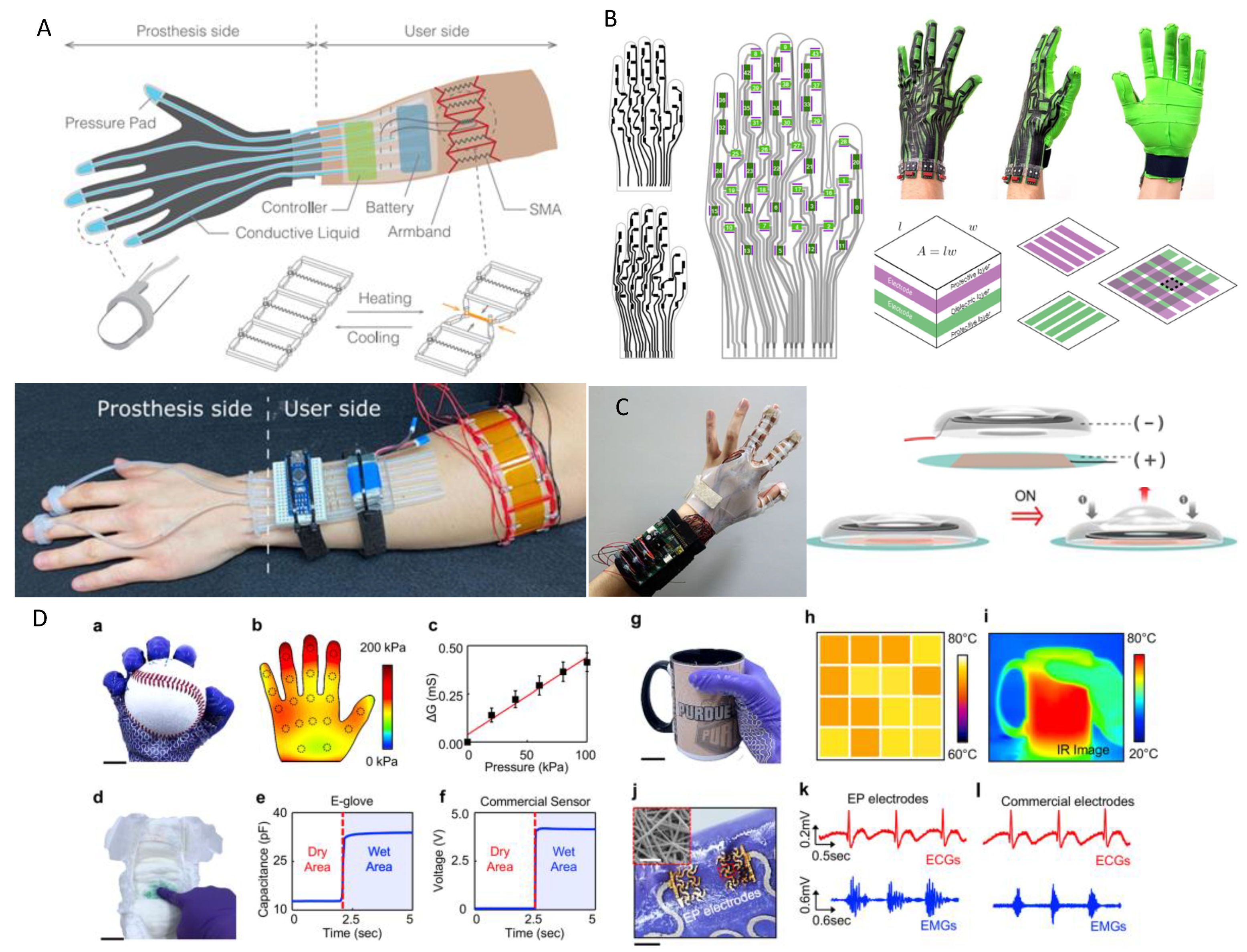{kind=link}
{kind=link}
{kind=link}
{kind=link}
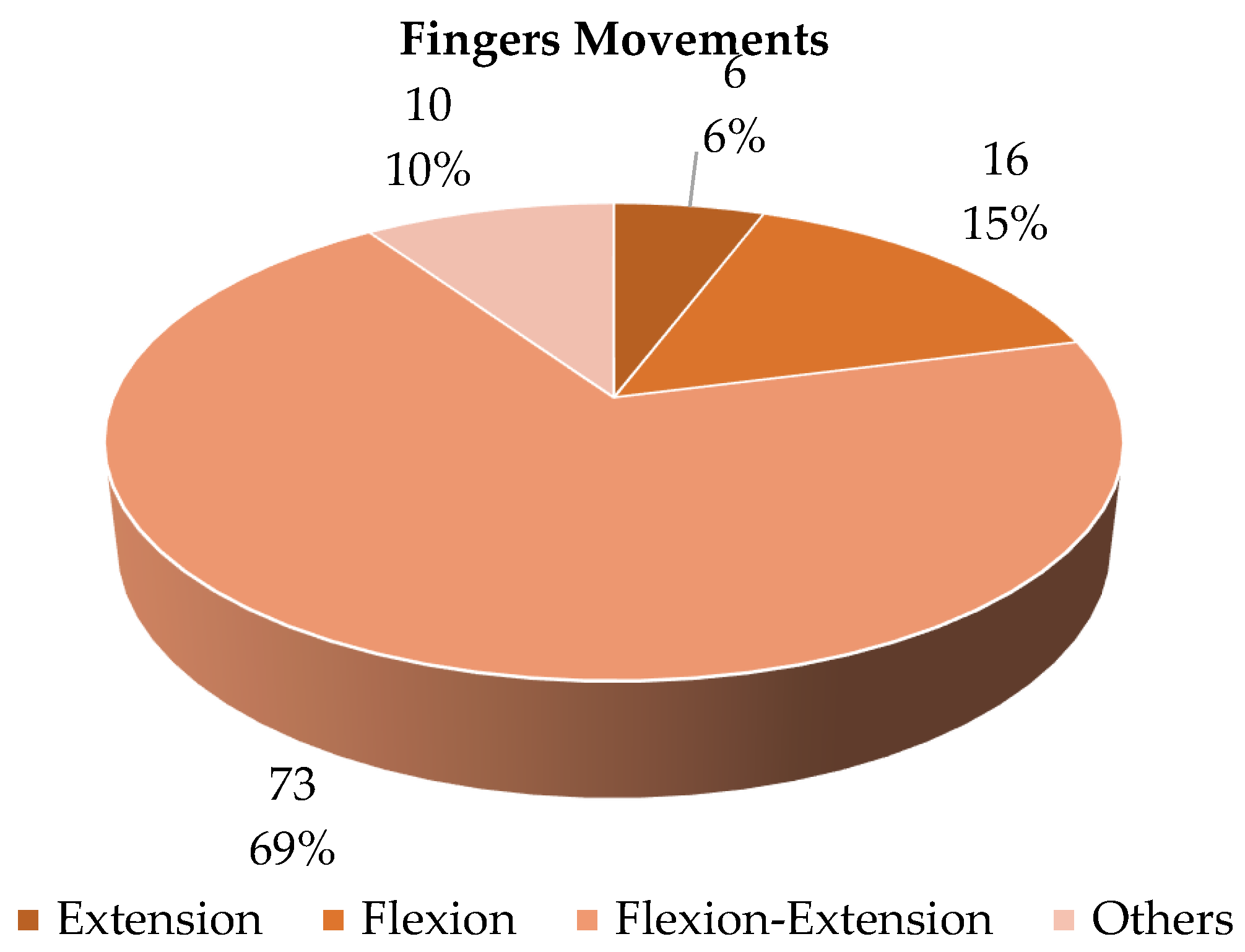{kind=link}
{kind=link}
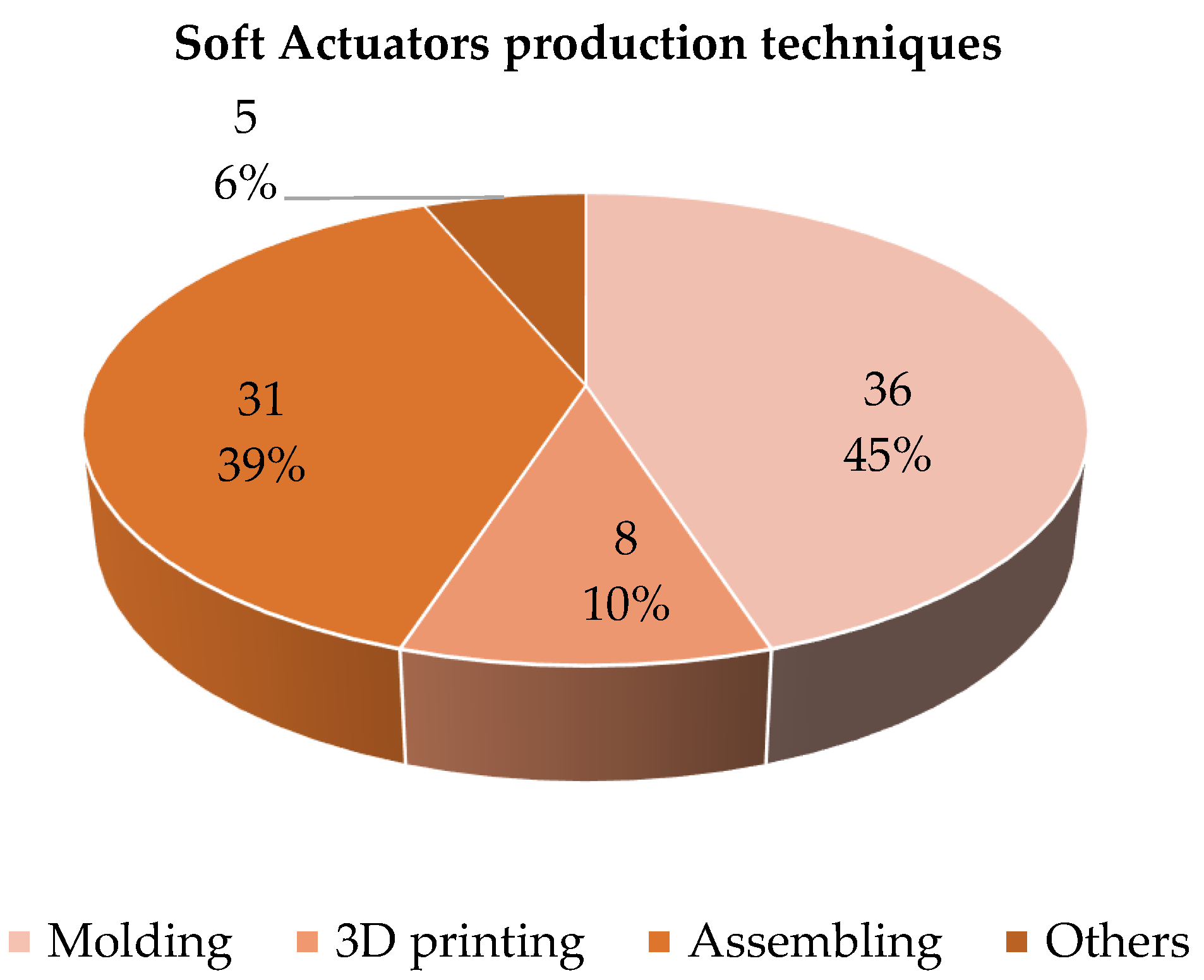{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 3.
Analysis of documents classified as clinical studies or trials. The table collects adopted clinical scales, tests, and evaluated functional tasks (with detail of upper extremity Fugl–Meyer assessment FM, and Jebsen–Taylor Hand Function Test JTHFT), assessment of forces produced by the user (with detail of maximal pinch strength, maximal handgrip strength), other investigated outcomes, evaluations of device usability and acceptance, and investigation on setup time.
Table 3.
Analysis of documents classified as clinical studies or trials. The table collects adopted clinical scales, tests, and evaluated functional tasks (with detail of upper extremity Fugl–Meyer assessment FM, and Jebsen–Taylor Hand Function Test JTHFT), assessment of forces produced by the user (with detail of maximal pinch strength, maximal handgrip strength), other investigated outcomes, evaluations of device usability and acceptance, and investigation on setup time.
| Reference | Clinical Scales, Tests and Functional Tasks | User’s Forces Assessment | Other Outcomes | Device Usability and Acceptance | Setup Time (don and doff) | ||||
|---|---|---|---|---|---|---|---|---|---|
| General | FM | JTHFT | General | Max. Pinch | Max. Handgrip | ||||
| Kottink_2022 [105] | x | x (Jamar dynamometer) | user experience, measured by self-reported grading (1–10) of ease of donning, ease of use and support from glove | ||||||
| Nasrallah_2021 [108] | functional magnetic resonance imaging fMRI | ||||||||
| Jiryaei_2021 [24] | ROM of PIP joint for index and middle fingers (standard plastic finger goniometer) | questionnaire of satisfaction (six items) | |||||||
| Palmcrantz_2020 [109] | x (modified Rankin Scale (mRS), Barthel Index (BI), Modified Ashworth scale, NeuroFlexor method, Box and Block Test (BBT), Action Research Arm Test (ARAT)) | x | x (digital hand dynamometer) | active range of wrist movement (goniometer), qualitative data for everyday activity performance (weekly interviews) | perceived usability, with semistructured interview | ||||
| Nuckols_2020 [104] | x (Modified Ashworth Scale (MAS) for flexors of elbow, wrist and finger, and extensors of wrist and finger) | x (sEMG of the fingers’ flexors and extensors) | range of motion (ROM)(as MCP and PIP angles, by analysis of videos), timed grip termination | ||||||
| Osuagwu_2020 [103] | x (Toronto Rehabilitation Institute hand function test (TRI-HFT), modified Ashworth scale (MAS)) | x (pinchmeter dynamometry) | QUEST (Quebec user evaluation of satisfaction with assistive technology) | ||||||
| Correia_2020 [110] | x | x (flexible pressure sensor mat) | x (flexible pressure sensor mat) | active range of motion (ROM) of the fingers for the metacarpophalangeal (MCP) and proximal interphalangeal (PIP) joints of the index finger, and for the MCP joint of the thumb (goniometer) | usability questionnaire (8 items) | x (and whether assistance was needed) | |||
| VanOmmeren_2019 [106] | Reaching | x (Jamar hydraulic hand dynamometer) | performance time, 3D motion analysis-related quantities: effect of the glove on movement duration of movement phases, movement smoothness, trunk displacement, peak hand velocity, hand opening and joint excursion of the elbow and wrist | ||||||
| Radder_2018 [100] | x | performance time, qualitative aspects of task execution | SUS, Intrinsic Motivation Inventory (IMI) | ||||||
| VanOmmeren_2018 [107] | x | x | x | SUS | |||||
| Cappello_2018 [39] | Toronto Rehabilitation Institute Hand Function Test (TRI-HFT), with 19 object manipulations | x (required by TRI-HFT) | |||||||
| Prange-Lasonder_2017 [101] | x | x | x | x (dynamometer) | SUS | ||||
| Radder_2017 [98] | reaching and grasping a cup/knife and using it to pour a drink/slice some food | x | SUS | ||||||
The main focus of these papers also justifies the limited technical description of the adopted device within the documents, in favor of references to the specific literature. This is, for instance, the case for the work by Osuagwu et al. [102], in which additional references [111] allow identifying characteristics of the device such as a weight of 700 g, or the presence of Force-Sensing Resistors as sensors. On the contrary, information regarding the exerted force is often provided within the document: it reaches 3–4 N at each finger in this work (at fingertip, [102]), another by the same author Osuagwu et al. [103], and in the work by Palmcrantz et al. [109], but increases to 9.12 N in the device described by Nasrallah et al. [108], 15 N in Cappello et al. [39], and up to 20 N in Kottink et al. [105]. In terms of weight, the lighter glove is presented by Correia et al. [110]: from 122 g to 149 g, depending on the size. The weight increases to 180 g for the for the devices in Tang et al. [23] and Nasrallah et al. [108], and reaches the 550 g in the work by Jiryaei et al. [24]. The maximum detected weight is the 700 g, as Osuagwu et al. previously cited [102]. Most of the works depict the presence of sensors on the gloves, in particular flex sensors (such as [23,100,101]), pressure sensors (such as [98,103,105,109]), and force sensors (such as [100,101,102]). Other sensors are less frequent, such as IMUs in the work by Correia et al. [110] or EMG sensors in the paper of Tang et al. [23].
Focusing on the device functionality, the described gloves mainly allow controlling both flexion and extension movements (8 documents); 4 studies involve the use of devices for the flexion movement only. Analyzing the actuated fingers, none of the papers explicitly describes systems for the actuation of a single finger or of four fingers. The glove used by Jiryaei et al. [24] enables the movement of two fingers, but most of them allows actuating three fingers [98,102,103,105,106,109] or the whole hand [23,39,100,101,104,110].
Finally, an interesting consideration can be shared about the declared application field: among the documents classified in the clinical trials category, only one work describes the used soft glove for both rehabilitation and assistance purposes [100]: four of them were classified as rehabilitation devoted [23,24,104,108], and the remaining ones related to assistance activities. Nonetheless, this classification could be partially biased by the specificity of the clinical study, more than reflecting the true characteristics or full potentialities of the involved device. In other words, in a study focused on the application of a soft glove to assist the subject during ADLs, it is likely that the characteristics of the system enabling these specific tasks will be emphasized, despite the possible suitability of the glove to perform rehabilitation treatments.
5. Conclusions
Fervent scientific activity related to soft gloves has emerged by the perspective analysis; roughly starting from 2012, an exponential growth of publications on the subject have developed. The balance among journal products and conference-related documents suggests a good maturity of the field, and continuous interest in the topic at the same time.
The focus is mainly on soft gloves for hand mobilization, to be used for rehabilitation or for assistance in the ADLs. The interest in rehabilitation has a slight predominance over assistance. A not negligible number of solutions has been proposed for both purposes, but this leads to trade-offs in terms of system performance. Although lower, the number of soft gloves developed for haptic applications is also significant. Mirror therapy and bilateral training applied to soft gloves are applied in a limited number of the analyzed systems, but they represent modalities of use with a significant interest in the medical field, as various studies have shown their effective contribution in favouring neuro-motor recovery.
As it emerges from the analysis of the main critical features of the analyzed soft gloves for rehabilitation or assistance (Table 2), there is a significant heterogeneity of values for all the considered aspects. The maximum developable forces vary greatly: the force at the fingertips ranges from 8 N to 50 N, while the maximum weight from 200 g to 1000 g. ROMs of finger joints are also very different among the proposed solutions: for the DIP the value varies between 23 and 72, for the PIP between 55 and 100, for the MCP between 27 and 84. The number of degrees of freedom is also very variable from solution to solution, with a predominance of three DOF and over, and with a growing trend in the number of degrees of freedom of the devices. This significant heterogeneity in characteristics is correlated with the high number of different design solutions proposed for the soft gloves actuation. The pneumatic solutions are clearly predominant over the electric with cable transmission and over the hydraulic ones.
The analytical review highlights the exploration by the scientific community of several different possible directions. In particular, three main lines emerge: soft actuators made with the technique of casting in a mold using silicone-based materials, soft actuators made with textile material, and actuators made with 3D printed plastic materials. For each of these three main types, many different concepts have been investigated, giving rise to a broad framework of solutions, each with specific strengths and weaknesses.
For actuators made with silicone rubber, there is a tendency towards the “keep it simple” rationale, i.e., trying to simplify the manufacturing process, and above all to develop actuators as single pieces, since the junction areas represent a significant weakness, which greatly reduces reliability. For most of the developed actuators, the performances experimentally measured confirm those obtained from the simulations. The simulations in some cases have been effectively used to identify the optimal values of the construction parameters in order to maximize performance. Textile actuators are simpler to manufacture, have lower weight and bulk, making the solution very compact and more comfortable to wear, but the developable forces are lower. Three-dimensional printing of soft actuators is the other detected main research direction, but the number of proposed proof-of-concept is low. Very frequently, the used material is TPU, and in some cases compressed air is used to generate the movement, while, in other cases, electric servomotors (rotary or linear) with cable transmission. Gloves with 3D-printed actuators are simpler to make, and allow an easy user customization, but on the other hand they are quite bulky, and the generated movement less follows the physiological movement of the fingers.
Another general trend is to move towards bi-directional actuation solutions, which allow control of both flexion and extension of the fingers. In a limited number of solutions, both movements are actively controlled, whereas in most cases flexion is active, and extension is obtained with passive return elements. Such elements can generally store elastic energy while deforming, which transforms into kinetics in the return.
Finally, thin McKibben muscles represent a very particular solution of actuation. They allow very small footprint, active actuation of both flexion and extension, in a fairly simple way, and with these actuators gloves with a high number of DOF have been developed (up to 20); however, forces are quite low.
The applicability of soft technologies also in the haptic field is remarkable and confirmed by the number of soft haptic gloves found in reviewed publications. Biomedical applications to give sensory feedback to amputee when using hand prostheses or to control a robotic soft glove worn on the impaired hand, implementing mirror therapy, have been found in the review, but virtual reality applications are also frequent. Flexion, strain and pressure sensors are the types most used in haptic soft gloves. Research in this field goes in the direction of identifying new manufacturing technologies, miniaturizing components and increasing integration in the context of smart devices.
Chu et al. in the conclusions of their dated 2018 review [9] stated that many proof-of-concept of designs of preclinical research prototypes were been developed, with clinical trials being the next logical goal. Our review work, which also includes these last three years, shows that some significant clinical trials have been conducted by various researchers of the medical field, but the heterogeneous nature of the works does not allow a direct comparison of the results. What clearly emerges from the analysis of these clinical works is the common attention to the subject, in a very broad sense, or more properly, both as a patient and as a user. Indeed, the studies certainly focus on the assessment of the results generated by the treatment itself, but on the other side the concepts of usability and acceptance of the device are investigated as well, and equally addressed across the different experimental setups, analyzed populations or samples sizes. This attention could be partly justified by the known relevance that the subject’s motivation plays in the rehabilitation path, especially in case of neurologic damages (as stroke events); a good acceptability of the device by the subject would surely ease the adoption of the system, reducing the risk of abandon. According to these considerations, in the last years the design of medical devices is paying particular attention to the integration of the concepts of ergonomics and usability since the early stages of the design process [112], and this approach is being further supported by the current evolutions in regulations and normative frameworks for this field [113].
Author Contributions
Conceptualization, M.T. and C.A.; methodology, M.T. and C.A.; formal analysis, M.T. and C.A.; data curation, M.T. and C.A.; writing—original draft preparation, M.T. and C.A.; writing—review and editing, M.T. and C.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Classification Tables
In the following, an extract of the tables resulting from the applied classification procedure is presented as Table A1.
Table A1.
Literature classification. From the left: reference ID) unique code of the entry; Document Type) A = article, CP = conference paper, BC = book chapter; Application Field) 1 = rehabilitation, 2 = assistance, 3 = robotic control, 4 = haptic, 5 = soft orthesis, mtbs = mirror therapy-based system (h = for hand, w = for wrist, r = for rehabilitation purposes, a = for assistive purposes); Soft Glove Function) 1 = actuation, 2 = sensing, 3 = actuation and sensing; Document Focus) 1 = control approaches, 2 = actuators, 3 = rehabilitation and assistive devices, 4 = clinical trials, 5 = sensing and haptic devices (m = modeling, d = design, o = optimization); Soft Glove Type) 1 = pneumatic glove, 2 = tendon-based glove, 3 = pneumatic and tendon-driven glove, 4 = hydraulically actuated soft glove, 5 = wearable haptic device.
Table A1.
Literature classification. From the left: reference ID) unique code of the entry; Document Type) A = article, CP = conference paper, BC = book chapter; Application Field) 1 = rehabilitation, 2 = assistance, 3 = robotic control, 4 = haptic, 5 = soft orthesis, mtbs = mirror therapy-based system (h = for hand, w = for wrist, r = for rehabilitation purposes, a = for assistive purposes); Soft Glove Function) 1 = actuation, 2 = sensing, 3 = actuation and sensing; Document Focus) 1 = control approaches, 2 = actuators, 3 = rehabilitation and assistive devices, 4 = clinical trials, 5 = sensing and haptic devices (m = modeling, d = design, o = optimization); Soft Glove Type) 1 = pneumatic glove, 2 = tendon-based glove, 3 = pneumatic and tendon-driven glove, 4 = hydraulically actuated soft glove, 5 = wearable haptic device.
| Reference ID | Document Type | Application Field af | Soft Glove Function sgf | Document Focus f | Soft Glove Type sgt | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | mtbs | 3 | 4 | 5 | 1 | 2 | 3 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | ||
| Sierotowicz_2022 [53] | A | h | h | x | x | x | ||||||||||||||
| Rakhtala_2022 [114] | A | h | x | x | d | x | ||||||||||||||
| Tang_2022 [23] | A | h | x | x | x | x | x | |||||||||||||
| Kottink_2022 [105] | BC | h | x | x | x | |||||||||||||||
| Quach_2022 [14] | CP | h | h | x | x | x | ||||||||||||||
| Nasrallah_2021 [108] | A | h | r | x | x | x | ||||||||||||||
| Ivanescu_2021 [115] | A | h | x | x | x | |||||||||||||||
| Wang_2021 [83] | A | h | x | x | ||||||||||||||||
| Ahmadjou_2021 [95] | A | h | x | x | x | |||||||||||||||
| Terrile_2021 [92] | A # | h | x | d | x | x | ||||||||||||||
| Cao_2021 [88] | CP | h | x | d | x | |||||||||||||||
| Jiryaei_2021 [24] | A | h | x | x | x | x | ||||||||||||||
| Palacios_2021 [17] | CP | h | x | x | x | x | x | x | x | |||||||||||
| Simons_2021 [72] | A # | h | x | x | ||||||||||||||||
| Feng_2021 [89] | A | h | x | x | x | |||||||||||||||
| Tsai_2021 [116] | A | h | x | x | x | |||||||||||||||
| El-Agroudy_2021 [117] | A # | h | x | m,o | x | |||||||||||||||
| Chen_2021a [26] | A | h | r | h | x | x | x | x | ||||||||||||
| Chiaradia_2021 [16] | A # | w | x | x | x | |||||||||||||||
| Chen_2021b [54] | A # | h | r | x | x | x | ||||||||||||||
| Do_2021 [25] | CP | h | x | x | x | |||||||||||||||
| Wanasinghe_2021 [118] | A # | x | x | x | ||||||||||||||||
| Setiawan_2021 [27] | A # | x | x | x | x | x | ||||||||||||||
| Jumphoo_2021 [119] | A # | h | x | x | ||||||||||||||||
| Du_2020 [28] | CP | h,w | x | x | x | |||||||||||||||
| Cheng_2020 [120] | A | h | x | x | x | |||||||||||||||
| El-Agroudy_2020 [121] | CP # | h | x | x | x | |||||||||||||||
| Nuckols_2020 [104] | CP | h | x | x | x | x | ||||||||||||||
| Nassour_2020 [71] | A | x | x | x | x | |||||||||||||||
| Gerges_2020 [66] | CP | h | r | x | x | x | x | |||||||||||||
| Baik_2020b [12] | A # | h | x | x | x | |||||||||||||||
| Goh_2020 [122] | A | h | x | x | x | |||||||||||||||
| Guo_2020 [123] | A | h | x | m,o | x | |||||||||||||||
| Takahashi_2020 [29] | A | x | x | x | x | |||||||||||||||
| Ge_2020 [51] | A | h | x | d,m | x | |||||||||||||||
| Chen_2020a [65] | CP | h | a | x | x | x | ||||||||||||||
| Wang_2020 [78] | A | x | x | m,o | x | |||||||||||||||
| Kavindya_2020 [124] | CP | h | x | x | x | |||||||||||||||
| Hu_2020 [33] | CP | h | x | d | x | |||||||||||||||
| Li_2020 [30] | CP | h | r | x | x | x | x | |||||||||||||
| Correia_2020 [110] | A | h | x | x | x | |||||||||||||||
| Gerez_2020 [32] | CP | h | h | x | x | x | ||||||||||||||
| Skaramagkas_2020 [125] | CP | h | x | x | x | |||||||||||||||
| Awantha_2020 [126] | CP | h | x | x | x | |||||||||||||||
| Burns_2020 [19] | BC | h | h | x | x | x | ||||||||||||||
| Osuagwu_2020 [103] | A # | h | x | x | x | |||||||||||||||
| Palmcrantz_2020 [109] | A # | h | x | x | x | |||||||||||||||
| Hameed_2020 [127] | CP | h | h | x | x | x | ||||||||||||||
| Radder_2020 [128] | A | x | ||||||||||||||||||
| Setiawan_2020 [129] | A | x | x | |||||||||||||||||
| Chen_2020b [31] | A # | h | h | x | x | d | x | |||||||||||||
| Koizumi_2020 [60] | CP | x | x | x | d | x | ||||||||||||||
| Ullah_2019 [34] | CP | x | x | x | x | x | x | |||||||||||||
| Kim_2019 [73] | A # | x | x | x | x | |||||||||||||||
| Song_2019 [75] | A # | x | x | x | x | x | x | |||||||||||||
| Ismail_2019 [35] | CP | h | x | x | x | |||||||||||||||
| Glauser_2019a [74] | CP # | h | x | x | x | |||||||||||||||
| Takahashi_2019a [61] | CP | x | x | x | ||||||||||||||||
| Trott_2019 [79] | CP | x | x | x | x | |||||||||||||||
| Kaneishi_2019 [93] | CP | x | x | x | x | |||||||||||||||
| Wang_2019a [52] | A | x | x | d,m | x | x | ||||||||||||||
| Zhou_2019 [130] | CP | h | x | x | x | |||||||||||||||
| Hameed_2019 [131] | CP # | x | x | x | x | |||||||||||||||
| Liu_2019 [36] | CP | x | x | x | x | |||||||||||||||
| Heung_2019 [82] | A | h | x | x | x | |||||||||||||||
| Kang_2019 [37] | A | h | x | x | x | |||||||||||||||
| Thalia_2019 * [132] | CP | h | x | x | ||||||||||||||||
| Takahashi_2019b [133] | CP | x | x | x | x | |||||||||||||||
| Wang_2019b [38] | A | h,w | x | x | x | |||||||||||||||
| Souhail_2019 [15] | A | h | x | x | x | |||||||||||||||
| Guo_2019 [134] | CP | h | ||||||||||||||||||
| VanOmmeren_2019 [106] | A # | h | h | x | x | |||||||||||||||
| Sun_2019 [85] | A | x | x | d | x | |||||||||||||||
| Xiloyannis_2019 [135] | BC # | h | x | x | ||||||||||||||||
| Osuagwu_2019 [102] | BC | h | x | x | ||||||||||||||||
| Chua_2019 * [136] | A | x | x | m | x | |||||||||||||||
| Kim_2018 [76] | CP | x | x | x | x | |||||||||||||||
| Ha_2018 [94] | CP | x | x | |||||||||||||||||
| Mohammadi_2018 [41] | CP | h | h | x | d | x | ||||||||||||||
| VanOmmeren_2018 * [107] | CP | h | x | |||||||||||||||||
| Jiralerspong_2018 [137] | CP | h | x | d | x | |||||||||||||||
| Jiang_2018 [84] | CP | h | x | d | x | |||||||||||||||
| Cappello_2018 [39] | A # | h | x | x | x | |||||||||||||||
| Zhang_2018 [138] | CP | x | x | x | x | |||||||||||||||
| Wang_2018 [139] | CP | x | x | d | ||||||||||||||||
| Sadeghian_2018 [96] | CP | x | x | x | x | |||||||||||||||
| Chatterjee_2018 [140] | CP | h | x | m | ||||||||||||||||
| Gunawardane_2018 [18] | CP | x | x | x | ||||||||||||||||
| Radder_2018 [100] | A # | h | h | x | x | x | ||||||||||||||
| Yi_2018 [40] | A | h | h | x | x | x | ||||||||||||||
| Kim_2017 [42] | CP | h | x | x | x | |||||||||||||||
| Ang_2017 [43] | CP | x | x | x | x | |||||||||||||||
| Yao_2017 [44] | A | h | x | x | ||||||||||||||||
| Yap_2017a [141] | A # | h | x | x | x | |||||||||||||||
| Prange-Lasonder_2017 [101] | CP | h | x | x | x | |||||||||||||||
| Yap_2017b [142] | CP | h | x | d | x | |||||||||||||||
| Jamil_2017 [143] | CP | x | x | d | x | |||||||||||||||
| Jiang_2017 [87] | CP | h | x | x | x | |||||||||||||||
| Yap_2017c [67] | A | h | h | r,a | x | x | x | |||||||||||||
| Yap_2017d [45] | A | h | x | x | x | |||||||||||||||
| Low_2017 [144] | A | x | x | x | ||||||||||||||||
| Popov_2017 [145] | A | h | x | x | x | |||||||||||||||
| Jadhav_2017 [77] | CP | x | x | x | x | |||||||||||||||
| Haghshenas-Jaryani_2017 * [146] | CP | h | x | |||||||||||||||||
| Radder_2017 [98] | BC | x | x | |||||||||||||||||
| Yi_2016 [147] | CP | h | x | x | x | |||||||||||||||
| Shen_2016 [80] | CP # | x | x | x | x | |||||||||||||||
| Yap_2016a * [148] | A | h | x | x | x | |||||||||||||||
| Biggar_2016 [149] | A # | h | x | x | x | |||||||||||||||
| Xiloyannis_2016 [150] | CP # | h | x | d | x | |||||||||||||||
| Haghshenas-Jaryani_2016 [47] | CP | h | x | x | x | |||||||||||||||
| Yap_2016c [151] | CP | x | x | x | ||||||||||||||||
| Cao_2016 [46] | CP | x | r | x | x | x | x | |||||||||||||
| Radder_2016 * [97] | CP # | h | x | x | ||||||||||||||||
| Polygerinos_2015a [48] | CP # | h | x | x | x | |||||||||||||||
| Yap_2015 [152] | CP | x | x | x | x | |||||||||||||||
| Polygerinos_2015b [59] | CP | h | x | x | x | |||||||||||||||
| Polygerinos_2015c [20] | CP | h | x | x | x | |||||||||||||||
| In_2015 [153] | A | x | x | x | x | |||||||||||||||
| Michaud_2015 [154] | CP # | x | x | x | x | |||||||||||||||
| Hammond_2014 [81] | CP | x | x | x | x | |||||||||||||||
| Delph_2013 [49] | CP # | h | x | x | x | |||||||||||||||
| Polygerinos_2013 [58] | CP | h | x | d | x | |||||||||||||||
| Kadowaki_2011 [50] | A # | h | x | x | x | |||||||||||||||
| Kuusisto_2009 * [155] | CP | h | x | x | x | x | x | |||||||||||||
* Full-text not available: analysis performed on title and abstract. # Open Access.
References
- Bütefisch, C.; Hummelsheim, H.; Denzler, P.; Mauritz, K.H. Repetitive training of isolated movements improves the outcome of motor rehabilitation of the centrally paretic hand. J. Neurol. Sci. 1995, 130, 59–68. [Google Scholar] [CrossRef]
- Sale, P.; Lombardi, V.; Franceschini, M. Hand robotics rehabilitation: Feasibility and preliminary results of a robotic treatment in patients with hemiparesis. Stroke Res. Treat. 2012, 2012, 820931. [Google Scholar] [CrossRef] [PubMed]
- Lum, P.S.; Burgar, C.G.; Shor, P.C.; Majmundar, M.; Van der Loos, M. Robot-assisted movement training compared with conventional therapy techniques for the rehabilitation of upper-limb motor function after stroke. Arch. Phys. Med. Rehabil. 2002, 83, 952–959. [Google Scholar] [CrossRef] [PubMed]
- Norouzi-Gheidari, N.; Archambault, P.S.; Fung, J. Effects of robot-assisted therapy on stroke rehabilitation in upper limbs: Systematic review and meta-analysis of the literature. J. Rehabil. Res. Dev. 2012, 49, 479–496. [Google Scholar] [CrossRef] [PubMed]
- Andersen, C.K.; Wittrup-Jensen, K.U.; Lolk, A.; Andersen, K.; Kragh-Sørensen, P. Ability to perform activities of daily living is the main factor affecting quality of life in patients with dementia. Health Qual. Life Outcomes 2004, 2, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Colombo, P.; Taveggia, G.; Chiesa, D.; Penati, R.; Tiboni, M.; Armas, L.D.E.; Casale, R. Lower Tinetti scores can support an early diagnosis of spatial neglect in post-stroke patients. Eur. J. Phys. Rehabil. Med. 2019, 55, 722–727. [Google Scholar] [CrossRef]
- Du Plessis, T.; Djouani, K.; Oosthuizen, C. A review of active hand exoskeletons for rehabilitation and assistance. Robotics 2021, 10, 40. [Google Scholar] [CrossRef]
- Tiboni, M.; Borboni, A.; Vérité, F.; Bregoli, C.; Amici, C. Sensors and Actuation Technologies in Exoskeletons: A Review. Sensors 2022, 22, 884. [Google Scholar] [CrossRef]
- Chu, C.Y.; Patterson, R.M. Soft robotic devices for hand rehabilitation and assistance: A narrative review. J. Neuroeng. Rehabil. 2018, 15, 9. [Google Scholar] [CrossRef]
- Yin, J.; Hinchet, R.; Shea, H.; Majidi, C. Wearable Soft Technologies for Haptic Sensing and Feedback. Adv. Funct. Mater. 2021, 31, 2007428. [Google Scholar] [CrossRef]
- Amici, C.; Ragni, F.; Ghidoni, M.; Fausti, D.; Bissolotti, L.; Tiboni, M. Multi-sensor validation approach of an end-effector-based robot for the rehabilitation of the upper and lower limb. Electronics 2020, 9, 1751. [Google Scholar] [CrossRef]
- Baik, S.; Park, S.; Park, J. Haptic Glove Using Tendon-Driven Soft Robotic Mechanism. Front. Bioeng. Biotechnol. 2020, 8, 541105, Corrigendum in Front. Bioeng. Biotechnol. 2020, 8, 10–11. [Google Scholar] [CrossRef]
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward soft robotics: A decade review of the design of hand exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef] [PubMed]
- Quach, B.M.; Van Toi, V.; Pham, H.T.T. Design of a soft robotic glove for hand rehabilitation based on pneumatic network method and low cost electro-pneumatic device. In Proceedings of the 8th International Conference on the Development of Biomedical Engineering in Vietnam, Ho Chi Minh, Vietnam, 27–29 June 2018; Springer: Cham, Switzerland, 2022; Volume 85, pp. 101–111. [Google Scholar] [CrossRef]
- Souhail, A.; Vessakosol, P. Low cost soft robotic gloves for at-home rehabilitation and daily living activities. J. Autom. Mob. Robot. Intell. Syst. 2019, 13, 14–26. [Google Scholar] [CrossRef]
- Chiaradia, D.; Tiseni, L.; Xiloyannis, M.; Solazzi, M.; Masia, L.; Frisoli, A. An Assistive Soft Wrist Exosuit for Flexion Movements With an Ergonomic Reinforced Glove. Front. Robot. AI 2021, 7, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Palacios, P.; Cornejo, J.; Rivera, M.V.; Napan, J.L.; Castillo, W.; Ticllacuri, V.; Reina, A.D.; Chaves-Jimenez, A.; Jamanca-Lino, G.; Chavez, J.C. Biomechatronic embedded system design of sensorized glove with soft robotic hand exoskeleton used for rover rescue missions on mars. In Proceedings of the 2021 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Toronto, ON, Canada, 21–24 April 2021. [Google Scholar] [CrossRef]
- Gunawardane, P.D.; Medagedara, N.T. Comparison of hand gesture inputs of leap motion controller & data glove into a soft finger. In Proceedings of the 2017 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS 2017), Ottawa, ON, Canada, 5–7 October 2017; 5–7 October 2017; pp. 62–68. [Google Scholar] [CrossRef]
- Burns, M.K.; Vinjamuri, R. Design of a Soft Glove-Based Robotic Hand Exoskeleton with Embedded Synergies; Springer International Publishing: Cham, Switzerland, 2020; pp. 71–87. [Google Scholar] [CrossRef]
- Polygerinos, P.; Galloway, K.C.; Savage, E.; Herman, M.; O’Donnell, K.; Walsh, C.J. Soft robotic glove for hand rehabilitation and task specific training. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2913–2919. [Google Scholar] [CrossRef]
- Matheus, K.; Dollar, A.M. Benchmarking grasping and manipulation: Properties of the objects of daily living. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 5020–5027. [Google Scholar] [CrossRef]
- Mullerpatan, R.P.; Karnik, G.; John, R. Grip and pinch strength: Normative data for healthy Indian adults. Hand Ther. 2013, 18, 11–16. [Google Scholar] [CrossRef]
- Tang, Z.Q.; Heung, H.L.; Shi, X.Q.; Tong, R.K.Y.; Li, Z. Probabilistic Model-Based Learning Control of a Soft Pneumatic Glove for Hand Rehabilitation. IEEE Trans. Biomed. Eng. 2022, 69, 1016–1028. [Google Scholar] [CrossRef]
- Jiryaei, Z.; Alvar, A.A.; Bani, M.A.; Vahedi, M.; Jafarpisheh, A.S.; Razfar, N. Development and feasibility of a soft pneumatic-robotic glove to assist impaired hand function in quadriplegia patients: A pilot study. J. Bodyw. Mov. Ther. 2021, 27, 731–736. [Google Scholar] [CrossRef]
- Do, P.T.; Vo, D.T.; Le, H.P. A Soft Pneumatic Robotic Glove for Hand Rehabilitation after Stroke. In Proceedings of the 2021 20th International Conference on Advanced Robotics, ICAR 2021, Ljubljana, Slovenia, 6–10 December 2021; pp. 7–12. [Google Scholar] [CrossRef]
- Chen, X.; Gong, L.; Wei, L.; Yeh, S.C.; Da Xu, L.; Zheng, L.; Zou, Z. A Wearable Hand Rehabilitation System with Soft Gloves. IEEE Trans. Ind. Inform. 2021, 17, 943–952. [Google Scholar] [CrossRef]
- Setiawan, J.D.; Ariyanto, M.; Nugroho, S.; Ismail, R.; Purbayanto, T.; Sihombing, H. Fuzzy logic control for a soft exoskeleton glove using a motor-tendon actuator [Control de lógica difusa para un guante de exoesqueleto suave que utiliza un actuador motor-tendón]. Ing. Investig. 2021, 41, 1–8. [Google Scholar] [CrossRef]
- Du, Q.; Zhao, W.; Cui, X.; Fei, Y. Design, control and testing of soft pneumatic rehabilitation glove. In Proceedings of the 2020 3rd World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Shanghai, China, 4–6 December 2020; pp. 50–55. [Google Scholar] [CrossRef]
- Takahashi, N.; Furuya, S.; Koike, H. Soft Exoskeleton Glove with Human Anatomical Architecture: Production of Dexterous Finger Movements and Skillful Piano Performance. IEEE Trans. Haptics 2020, 13, 679–690. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Wang, T.; Zhuo, Y.; He, B.; Tao, T.; Xie, J.; Xu, G. A soft robotic glove for hand rehabilitation training controlled by movements of the healthy hand. In Proceedings of the 2020 17th International Conference on Ubiquitous Robots (UR), Kyoto, Japan, 22–26 June 2020; pp. 62–67. [Google Scholar] [CrossRef]
- Chen, Y.; Tan, X.; Yan, D.; Zhang, Z.; Gong, Y. A Composite Fabric-Based Soft Rehabilitation Glove with Soft Joint for Dementia in Parkinson’s Disease. IEEE J. Transl. Eng. Health Med. 2020, 8, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Gerez, L.; Dwivedi, A.; Liarokapis, M. A Hybrid, Soft Exoskeleton Glove Equipped with a Telescopic Extra Thumb and Abduction Capabilities. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9100–9106. [Google Scholar] [CrossRef]
- Hu, D.; Zhang, J.; Yang, Y.; Li, Q.; Li, D.; Hong, J. A novel soft robotic glove with positive-negative pneumatic actuator for hand rehabilitation. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM, Boston, MA, USA, 6–9 July 2020; pp. 1840–1847. [Google Scholar] [CrossRef]
- Ullah, M.M.; Hafeez, U.; Shehzad, M.N.; Awais, M.N.; Elahi, H. A soft robotic glove for assistance and rehabilitation of stroke affected patients. In Proceedings of the 2019 International Conference on Frontiers of Information Technology, FIT 2019, Islamabad, Pakistan, 16–18 December 2019; pp. 110–115. [Google Scholar] [CrossRef]
- Ismail, R.; Ariyanto, M.; Hidayat, T.; Setiawan, J.D. Design of fabric-based soft robotic glove for hand function assistance. In Proceedings of the 2019 6th International Conference on Information Technology, Computer and Electrical Engineering, ICITACEE 2019, Semarang, Indonesia, 23–24 September 2019. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, L.; Yu, P.; Yang, T.; Li, N.; Yang, Y.; Liu, L. A Wearable Bionic Soft Exoskeleton Glove for Stroke Patients. In Proceedings of the 8th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, CYBER 2018, Tianjin, China, 19–23 July 2018; pp. 932–937. [Google Scholar] [CrossRef]
- Kang, B.B.; Choi, H.; Lee, H.; Cho, K.J. Exo-Glove Poly II: A Polymer-Based Soft Wearable Robot for the Hand with a Tendon-Driven Actuation System. Soft Robot. 2019, 6, 214–227. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Liu, Z.; Fei, Y. Design and testing of a soft rehabilitation glove integrating finger and wrist function. J. Mech. Robot. 2019, 11, 011015. [Google Scholar] [CrossRef]
- Cappello, L.; Meyer, J.T.; Galloway, K.C.; Peisner, J.D.; Granberry, R.; Wagner, D.A.; Engelhardt, S.; Paganoni, S.; Walsh, C.J. Assisting hand function after spinal cord injury with a fabric-based soft robotic glove. J. Neuroeng. Rehabil. 2018, 15, 59. [Google Scholar] [CrossRef]
- Yi, J.; Chen, X.; Wang, Z. A Three-Dimensional-Printed Soft Robotic Glove with Enhanced Ergonomics and Force Capability. IEEE Robot. Autom. Lett. 2018, 3, 242–248. [Google Scholar] [CrossRef]
- Mohammadi, A.; Lavranos, J.; Choong, P.; Oetomo, D. Flexo-glove: A 3D Printed Soft Exoskeleton Robotic Glove for Impaired Hand Rehabilitation and Assistance. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS 2018, Honolulu, HI, USA, 18–21 July 2018; pp. 2120–2123. [Google Scholar] [CrossRef]
- Kim, Y.J.; Jeong, Y.J.; Jeon, H.S.; Lee, D.W.; Kim, J.I. Development of a soft robotic glove with high gripping force using force distributing compliant structures. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 3883–3890. [Google Scholar] [CrossRef]
- Ang, B.W.K.; Yeow, C.H. Print-it-Yourself (PIY) glove: A fully 3D printed soft robotic hand rehabilitative and assistive exoskeleton for stroke patients. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 1219–1223. [Google Scholar] [CrossRef]
- Yao, Z.; Linnenberg, C.; Argubi-Wollesen, A.; Weidner, R.; Wulfsberg, J.P. Biomimetic design of an ultra-compact and light-weight soft muscle glove. Prod. Eng. 2017, 11, 731–743. [Google Scholar] [CrossRef]
- Yap, H.K.; Kamaldin, N.; Lim, J.H.; Nasrallah, F.A.; Goh, J.C.H.; Yeow, C.H.C.H. A Magnetic Resonance Compatible Soft Wearable Robotic Glove for Hand Rehabilitation and Brain Imaging. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 782–793. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, D. Soft robotic glove with integrated sEMG sensing for disabled people with hand paralysis. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics, ROBIO 2016, Qingdao, China, 3–7 December 2016; pp. 714–718. [Google Scholar] [CrossRef]
- Haghshenas-Jaryani, M.; Carrigan, W.; Nothnagle, C.; Wijesundara, M.B.J. Sensorized soft robotic glove for continuous passive motion therapy. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Singapore, 26–29 June 2016; pp. 815–820. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef]
- Delph, M.A.; Fischer, S.A.; Gauthier, P.W.; Luna, C.H.M.; Clancy, E.A.; Fischer, G.S. A soft robotic exomusculature glove with integrated sEMG sensing for hand rehabilitation. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Seattle, WA, USA, 24–26 June 2013. [Google Scholar] [CrossRef]
- Kadowaki, Y.; Noritsugu, T.; Takaiwa, M.; Sasaki, D.; Kato, M. Development of soft power-assist glove and control based on human intent. J. Robot. Mechatron. 2011, 23, 281–291. [Google Scholar] [CrossRef]
- Ge, L.; Chen, F.; Wang, D.; Zhang, Y.; Han, D.; Wang, T.; Gu, G. Design, Modeling, and Evaluation of Fabric-Based Pneumatic Actuators for Soft Wearable Assistive Gloves. Soft Robot. 2020, 7, 583–596. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Fei, Y.; Pang, W. Design, Modeling, and Testing of a Soft Pneumatic Glove with Segmented PneuNets Bending Actuators. IEEE/ASME Trans. Mechatron. 2019, 24, 990–1001. [Google Scholar] [CrossRef]
- Sierotowicz, M.; Lotti, N.; Nell, L.; Missiroli, F.; Alicea, R.; Zhang, X.; Xiloyannis, M.; Rupp, R.; Papp, E.; Krzywinski, J.; et al. EMG-Driven Machine Learning Control of a Soft Glove for Grasping Assistance and Rehabilitation. IEEE Robot. Autom. Lett. 2022, 7, 1566–1573. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, Z.; Wen, Y. A soft exoskeleton glove for hand bilateral training via surface EMG. Sensors 2021, 21, 578. [Google Scholar] [CrossRef] [PubMed]
- Serpelloni, M.; Tiboni, M.; Lancini, M.; Pasinetti, S.; Vertuan, A.; Gobbo, M.; Meccanica, I.; Brescia, U. Preliminary Study of a Robotic Rehabilitation System Driven by EMG for Hand Mirroring. In Proceedings of the 2016 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Benevento, Italy, 15–18 May 2016. [Google Scholar]
- Tiboni, M.; Borboni, A.; Faglia, R.; Pellegrini, N. Robotics rehabilitation of the elbow based on surface electromyography signals. Adv. Mech. Eng. 2018, 10, 1687814018754590. [Google Scholar] [CrossRef]
- Tiboni, M.; Legnani, G.; Lancini, M.; Serpelloni, M.; Gobbo, M.; Fausti, D. ERRSE: Elbow robotic rehabilitation system with an EMG-based force control. Mech. Mach. Sci. 2018, 49, 892–900. [Google Scholar] [CrossRef]
- Polygerinos, P.; Lyne, S.; Wang, Z.; Nicolini, L.F.; Mosadegh, B.; Whitesides, G.M.; Walsh, C.J. Towards a soft pneumatic glove for hand rehabilitation. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1512–1517. [Google Scholar] [CrossRef]
- Polygerinos, P.; Galloway, K.C.; Sanan, S.; Herman, M.; Walsh, C.J. EMG controlled soft robotic glove for assistance during activities of daily living. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Singapore, 11–14 August 2015; pp. 55–60. [Google Scholar] [CrossRef]
- Koizumi, S.; Chang, T.H.; Nabae, H.; Endo, G.; Suzumori, K.; Mita, M.; Saitoh, K.; Hatakeyama, K.; Chida, S.; Shimada, Y. Soft Robotic Gloves with Thin McKibben Muscles for Hand Assist and Rehabilitation. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration, SII 2020, Honolulu, HI, USA, 12–15 January 2020; pp. 93–98. [Google Scholar] [CrossRef]
- Takahashi, N.; Takahashi, H.; Koike, H. Soft Exoskeleton Glove Enabling Force Feedback for Human-Like Finger Posture Control with 20 Degrees of Freedom. In Proceedings of the 2019 IEEE World Haptics Conference (WHC), Tokyo, Japan, 9–12 July 22019; pp. 217–222. [Google Scholar] [CrossRef]
- Stoykov, M.E.; Lewis, G.N.; Corcos, D.M. Comparison of bilateral and unilateral training for upper extremity hemiparesis in stroke. Neurorehabilit. Neural Repair 2009, 23, 945–953. [Google Scholar] [CrossRef]
- Yavuzer, G.; Selles, R.; Sezer, N.; Sütbeyaz, S.; Bussmann, J.B.; Köseoǧlu, F.; Atay, M.B.; Stam, H.J. Mirror Therapy Improves Hand Function in Subacute Stroke: A Randomized Controlled Trial. Arch. Phys. Med. Rehabil. 2008, 89, 393–398. [Google Scholar] [CrossRef]
- Sale, P.; Franceschini, M.; Mazzoleni, S.; Palma, E.; Agosti, M.; Posteraro, F. Effects of upper limb robot-assisted therapy on motor recovery in subacute stroke patients. J. Neuroeng. Rehabil. 2014, 11, 104. [Google Scholar] [CrossRef]
- Chen, X.; Gong, L.; Zheng, L.; Zou, Z. Soft Exoskeleton Glove for Hand Assistance Based on Human-machine Interaction and Machine Learning. In Proceedings of the 2020 IEEE International Conference on Human-Machine Systems, ICHMS 2020, Rome, Italy, 7–9 September 2020. [Google Scholar] [CrossRef]
- Gerges, F.; Desai, J.; Watkins, J.; Burugupally, S.P. Master-Slave Control for a Pneumatically Actuated Low Pressure Soft Robotic Glove to Facilitate Bilateral Training for Stroke Patients. In Proceedings of the 2020 23rd IEEE International Symposium on Measurement and Control in Robotics, ISMCR 2020, Budapest, Hungary, 15–17 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Yap, H.K.; Khin, P.M.; Koh, T.H.; Sun, Y.; Liang, X.; Lim, J.H.; Yeow, C.H. A Fully Fabric-Based Bidirectional Soft Robotic Glove for Assistance and Rehabilitation of Hand Impaired Patients. IEEE Robot. Autom. Lett. 2017, 2, 1383–1390. [Google Scholar] [CrossRef]
- Logozzo, S.; Cristina, M.; Malvezzi, M. Tribology International Modelling the human touch: A basic study for haptic technology. Tribol. Int. 2022, 166, 107352. [Google Scholar] [CrossRef]
- Chinello, F.; Pacchierotti, C.; Malvezzi, M.; Prattichizzo, D. A Three Revolute-Revolute-Spherical wearable fingertip cutaneous device for stiffness rendering. IEEE Trans. Haptics 2017, 11, 39–50. [Google Scholar] [CrossRef] [PubMed]
- Tiboni, M.; Filippini, A.; Amici, C. Test-Bench for the Characterization of Flexion Sensors Used in Biomechanics. Electronics 2021, 10, 2994. [Google Scholar] [CrossRef]
- Nassour, J.; Amirabadi, H.G.; Weheabby, S.; Ali, A.A.; Lang, H.; Hamker, F. A robust data-driven soft sensory glove for human hand motions identification and replication. IEEE Sens. J. 2020, 20, 12972–12979. [Google Scholar] [CrossRef]
- Simons, M.F.; Digumarti, K.M.; Le, N.H.; Chen, H.Y.; Carreira, S.C.; Zaghloul, N.S.S.; Diteesawat, R.S.; Garrad, M.; Conn, A.T.; Kent, C.; et al. B: Ionic Glove: A soft smart wearable sensory feedback device for upper limb robotic prostheses. IEEE Robot. Autom. Lett. 2021, 6, 3311–3316. [Google Scholar] [CrossRef]
- Kim, M.K.; Parasuraman, R.N.; Wang, L.; Park, Y.; Kim, B.; Lee, S.J.; Lu, N.; Min, B.C.; Lee, C.H. Soft-packaged sensory glove system for human-like natural interaction and control of prosthetic hands. NPG Asia Mater. 2019, 11, 43. [Google Scholar] [CrossRef]
- Glauser, O.; Wu, S.; Panozzo, D.; Hilliges, O.; Sorkine-Hornung, O. A stretch-sensing soft glove for interactive hand pose estimation. In Proceedings of the ACM SIGGRAPH 2019 Emerging Technologies, Los Angeles, CA, USA, 28 July–1 August 2019; Volume 38. [Google Scholar] [CrossRef]
- Song, K.; Kim, S.H.; Jin, S.; Kim, S.; Lee, S.; Kim, J.S.; Park, J.M.; Cha, Y. Pneumatic actuator and flexible piezoelectric sensor for soft virtual reality glove system. Sci. Rep. 2019, 9, 8988. [Google Scholar] [CrossRef]
- Kim, S.; Jeong, D.; Oh, J.; Park, W.; Bae, J. A Novel All-in-One Manufacturing Process for a Soft Sensor System and its Application to a Soft Sensing Glove. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 7004–7009. [Google Scholar] [CrossRef]
- Jadhav, S.; Kannanda, V.; Kang, B.; Tolley, M.T.; Schulze, J.P. Soft robotic glove for kinesthetic haptic feedback in virtual reality environments. Electron. Imaging 2017, 29, 19–24. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, D.; Zhang, Y.; Liu, J.; Wen, L.; Xu, W.; Zhang, Y. A three-fingered force feedback glove using fiber-reinforced soft bending actuators. IEEE Trans. Ind. Electron. 2020, 67, 7681–7690. [Google Scholar] [CrossRef]
- Trott, R.E.; Kleinig, T.J.; Hillier, S.L.; Hobbs, D.A.; Reynolds, K.J. A modular hybrid exoskeletal-soft glove for high degree of freedom monitoring capability. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Toronto, ON, Canada, 24–28 June 2019; pp. 577–582. [Google Scholar] [CrossRef]
- Shen, Z.; Yi, J.; Li, X.; Mark, L.H.P.; Hu, Y.; Wang, Z. A soft stretchable bending sensor and data glove applications. In Proceedings of the 2016 IEEE International Conference on Real-Time Computing and Robotics, RCAR 2016, Chicago, IL, USA, 14-18 September 2016; pp. 88–93. [Google Scholar] [CrossRef]
- Hammond, F.L.; Menguc, Y.; Wood, R.J. Toward a modular soft sensor-embedded glove for human hand motion and tactile pressure measurement. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4000–4007. [Google Scholar] [CrossRef]
- Heung, K.H.L.; Tong, R.K.Y.; Lau, A.T.H.; Li, Z. Robotic Glove with Soft-Elastic Composite Actuators for Assisting Activities of Daily Living. Soft Robot. 2019, 6, 289–304. [Google Scholar] [CrossRef]
- Wang, X.; Cheng, Y.; Zheng, H.; Li, Y.; Wang, C. Design and optimization of actuator for multi-joint soft rehabilitation glove. Ind. Robot. 2021, 48, 877–890. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, D.; Liu, P.; Jiao, X.; Ping, Z.; Xu, Z.; Li, J.; Xu, Y. Fishbone-inspired soft robotic glove for hand rehabilitation with multi-degrees-of-freedom. In Proceedings of the 2018 IEEE International Conference on Soft Robotics, RoboSoft 2018, Livorno, Italy, 24–28 April 2018; pp. 394–399. [Google Scholar] [CrossRef]
- Sun, Z.-S.; Guo, Z.-H.; Tang, W. Design of wearable hand rehabilitation glove with soft hoop-reinforced pneumatic actuator. J. Cent. South Univ. 2019, 26, 106–119. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of Soft Fiber-Reinforced Bending Actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, D.; Que, J.; Liu, Z.; Wang, Z.; Xu, Y. Soft robotic glove for hand rehabilitation based on a novel fabrication method. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics, ROBIO 2017, Macau, Macao, 5–8 December 2017; pp. 817–822. [Google Scholar] [CrossRef]
- Cao, X.; Ma, K.; Jiang, Z.; Xu, F. A Soft Robotic Glove for Hand Rehabilitation using Pneumatic Actuators with Jamming Structure. In Proceedings of the Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 4120–4125. [Google Scholar] [CrossRef]
- Feng, M.; Yang, D.; Gu, G. High-Force Fabric-Based Pneumatic Actuators with Asymmetric Chambers and Interference-Reinforced Structure for Soft Wearable Assistive Gloves. IEEE Robot. Autom. Lett. 2021, 6, 3105–3111. [Google Scholar] [CrossRef]
- Nassour, J.; Hamker, F. Enfolded Textile Actuator for Soft Wearable Robots. In Proceedings of the 2019 IEEE International Conference on Cyborg and Bionic Systems, Munich, Germany, 18–20 September 2019; pp. 17–19. [Google Scholar]
- Luo, Y.; Foshey, M. Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting. In Proceedings of the CHI Conference on Human Factors in Computing Systems, New Orleans, LA, USA, 29 April–5 May 2022; Association for Computing Machinery: New York, NY, USA, 2022. [Google Scholar]
- Terrile, S.; Miguelañez, J.; Barrientos, A. A soft haptic glove actuated with shape memory alloy and flexible stretch sensors. Sensors 2021, 21, 5278. [Google Scholar] [CrossRef] [PubMed]
- Kaneishi, D.; Matthew, R.P.; Leu, J.E.; O’Donnell, J.; Zhang, B.; Tomizuka, M.; Stuart, H. Hybrid control interface of a semi-soft assistive glove for people with spinal cord injuries. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Toronto, ON, Canada, 24–28 June 2019; pp. 132–138. [Google Scholar] [CrossRef]
- Ha, J.; Kim, D.; Jo, S. Use of deep learning for position estimation and control of soft glove. In Proceedings of the International Conference on Control, Automation and Systems, PyeongChang, Korea, 17–20 October 2018; pp. 570–574. [Google Scholar]
- Ahmadjou, A.; Sadeghi, S.; Zareinejad, M.; Talebi, H.A. A compact valveless pressure control source for soft rehabilitation glove. Int. J. Med. Robot. Comput. Assist. Surg. 2021, 17, e2298. [Google Scholar] [CrossRef]
- Sadeghian, R.; Azizinezhad, P.; Sedigh, P.; Shahin, S.; Masouleh, M.T. Control of a four-mecanum wheeled robot with a soft-robotic glove. In Proceedings of the 2017 IEEE 4th International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 22 December 2017; pp. 310–314. [Google Scholar] [CrossRef]
- Radder, B.; Prange-Lasonder, G.B.; Kottink, A.I.R.; Gaasbeek, L.; Holmberg, J.; Meyer, T.; Buurke, J.H.; Rietman, J.S. Preliminary findings of feasibility of a wearable soft-robotic glove supporting impaired hand function in daily life: A soft-robotic glove supporting adl of elderly people. In Proceedings of the ICT4AWE 2016—2nd International Conference on Information and Communication Technologies for Ageing Well and e-Health; Science and Technology Publications: Setubal, Portugal, 2016; pp. 180–185. [Google Scholar] [CrossRef]
- Radder, B.; Prange-Lasonder, G.B.; Kottink, A.I.R.; Gaasbeek, L.; Sletta, K.; Holmberg, J.; Meyer, T.; Buurke, J.H.; Rietman, J.S. Preliminary Evaluation of a Wearable Soft-Robotic Glove Supporting Grip Strength in ADL. Biosyst. Biorobot. 2017, 15, 1245–1250. [Google Scholar] [CrossRef]
- Amici, C.; Ceresoli, F.; Gaffurini, P.; Mor, M.; Ragni, F.; Bissolotti, L. Preliminary Validation of a Device for the Upper and Lower Limb Robotic Rehabilitation. In Proceedings of the 2019 23rd International Conference on Mechatronics Technology (ICMT), Salerno, Italy, 23–26 October 2019. [Google Scholar] [CrossRef]
- Radder, B.; Prange-Lasonder, G.B.; Kottink, A.I.R.; Melendez-Calderon, A.; Buurke, J.H.; Rietman, J.S. Feasibility of a wearable soft-robotic glove to support impaired hand function in stroke patients. J. Rehabil. Med. 2018, 50, 598–606. [Google Scholar] [CrossRef]
- Prange-Lasonder, G.B.; Radder, B.; Kottink, A.I.R.; Melendez-Calderon, A.; Buurke, J.H.; Rietman, J.S. Applying a soft-robotic glove as assistive device and training tool with games to support hand function after stroke: Preliminary results on feasibility and potential clinical impact. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, London, UK, 17–20 July 2017; pp. 1401–1406. [Google Scholar] [CrossRef]
- Osuagwu, B.A.; Timms, S.; Peachment, R.; Dowie, S.; Thrussell, H.; Cross, S.; Heywood, T.; Shirley, R.; Taylor, J. Clinical trial of the soft extra muscle glove to assess orthotic and long-term functional gain following chronic incomplete tetraplegia: Preliminary functional results. Biosyst. Biorobot. 2019, 21, 385–389. [Google Scholar] [CrossRef]
- Osuagwu, B.A.C.; Timms, S.; Peachment, R.; Dowie, S.; Thrussell, H.; Cross, S.; Shirley, R.; Segura-Fragoso, A.; Taylor, J. Home-based rehabilitation using a soft robotic hand glove device leads to improvement in hand function in people with chronic spinal cord injury:a pilot study. J. Neuroeng. Rehabil. 2020, 17, 40. [Google Scholar] [CrossRef]
- Nuckols, K.; Hohimer, C.J.; Glover, C.; De Lucena, D.S.; Moyo, W.; Wagner, D.; Cloutier, A.; Lin, D.J.; Walsh, C.J. Effects of a Soft Robotic Glove using a High Repetition Protocol in Chronic Stroke: A Pilot Study. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, New York, NY, USA, 29 November–1 December2020; pp. 428–433. [Google Scholar] [CrossRef]
- Kottink, A.I.R.; Nikamp, C.D.M.; Buurke, J.H.; Bos, F.; van der Sluis, C.K.; van den Broek, M.; Onneweer, B.; Stolwijk-Swüste, J.M.; Brink, S.M.; Rietman, J.S.; et al. Six weeks Use of a Wearable Soft-robotic Glove During ADL: Preliminary Results of Ongoing Clinical Study. Biosyst. Biorobot. 2022, 28, 15–20. [Google Scholar] [CrossRef]
- van Ommeren, A.; Radder, B.; Kottink, A.; Buurke, J.; Prange-Lasonder, G.; Rietman, J. Quantifying upper extremity performance with and without assistance of a soft-robotic glove in elderly patients: A kinematic analysis. J. Rehabil. Med. 2019, 51, 298–306. [Google Scholar] [CrossRef]
- Van Ommeren, A.L.; Radder, B.; Buurke, J.H.; Kottink, A.I.R.; Holmberg, J.; Sletta, K.; Prange-Lasonder, G.B.; Rietman, J.S. The Effect of Prolonged Use of a Wearable Soft-Robotic Glove Post Stroke—A Proof-of-Principle. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Enschede, The Netherlands, 26–29 August 2018; pp. 445–449. [Google Scholar] [CrossRef]
- Nasrallah, F.A.; Mohamed, A.Z.; Yap, H.K.; Lai, H.S.; Yeow, C.H.C.H.; Lim, J.H. Effect of proprioceptive stimulation using a soft robotic glove on motor activation and brain connectivity in stroke survivors. J. Neural Eng. 2021, 18, 066049. [Google Scholar] [CrossRef]
- Palmcrantz, S.; Plantin, J.; Borg, J. Factors affecting the usability of an assistive soft robotic glove after stroke or multiple sclerosis. J. Rehabil. Med. 2020, 52, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Correia, C.; Nuckols, K.; Wagner, D.; Zhou, Y.M.; Clarke, M.; Orzel, D.; Solinsky, R.; Paganoni, S.; Walsh, C.J. Improving Grasp Function after Spinal Cord Injury with a Soft Robotic Glove. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1407–1415. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, M.; Ingvast, J.; Wikander, J.; von Holst, H. The Soft Extra Muscle system for improving the grasping capability in neurological rehabilitation. In Proceedings of the 2012 IEEE-EMBS Conference on Biomedical Engineering and Sciences, Langkawi, Malaysia, 17–19 December 2012; pp. 412–417. [Google Scholar] [CrossRef]
- Formicola, R.; Ragni, F.; Borboni, A.; Amici, C. Design Process of Medical Devices for Robotic Rehabilitation: An Open Innovation-Inspired Approach. In Robotics, Machinery and Engineering Technology for Precision Agriculture; Springer: Cham, Switzerland, 2022; pp. 575–584. [Google Scholar] [CrossRef]
- Formicola, R.; Ragni, F.; Mor, M.; Bissolotti, L.; Amici, C. Design Approach of Medical Devices for Regulation Compatibility: A Robotic Rehabilitation Case Study. In Proceedings of the 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health; Science and Technology Publications: Setubal, Portugal, 2021. [Google Scholar] [CrossRef]
- Rakhtala, S.M.; Ghayebi, R. Real time control and fabrication of a soft robotic glove by two parallel sensors with MBD approach. Med. Eng. Phys. 2022, 100, 103743. [Google Scholar] [CrossRef] [PubMed]
- Ivanescu, M.; Popescu, N.; Popescu, D. Delay Time Fractional-Order Model for the Soft Exoskeleton Glove Control. IEEE Trans. -Hum.-Mach. Syst. 2021, 51, 740–745. [Google Scholar] [CrossRef]
- Tsai, Y.T.; Jhu, W.Y.; Chen, C.C.; Kao, C.H.; Chen, C.Y. Unity game engine: Interactive software design using digital glove for virtual reality baseball pitch training. Microsyst. Technol. 2021, 27, 1401–1417. [Google Scholar] [CrossRef]
- El-Agroudy, M.N.; Awad, M.I.; Maged, S.A. Soft finger modelling and co-simulation control towards assistive exoskeleton hand glove. Micromachines 2021, 12, 181. [Google Scholar] [CrossRef]
- Wanasinghe, A.T.; Awantha, W.V.I.; Kavindya, A.G.P.; Kulasekera, A.L.; Chathuranga, D.S.; Senanayake, B. A Layer Jamming Soft Glove for Hand Tremor Suppression. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 2684–2694. [Google Scholar] [CrossRef]
- Jumphoo, T.; Uthansakul, M.; Duangmanee, P.; Khan, N.; Uthansakul, P. Soft robotic glove controlling using brainwave detection for continuous rehabilitation at home. Comput. Mater. Contin. 2021, 66, 961–976. [Google Scholar] [CrossRef]
- Cheng, N.; Phua, K.S.; Lai, H.S.; Tam, P.K.; Tang, K.Y.; Cheng, K.K.; Yeow, R.H.; Ang, K.K.; Guan, C.; Lim, J.H. Brain-Computer Interface-Based Soft Robotic Glove Rehabilitation for Stroke. IEEE Trans. Biomed. Eng. 2020, 67, 3339–3351. [Google Scholar] [CrossRef] [PubMed]
- El-Agroudy, M.N.; Awad, M.I.; Rehan, A.; Maged, S.A. Assistive exoskeleton hand glove using soft pneumatic actuators: Design optimization. In IOP Conference Series: Materials Science and Engineering; IOP Publishing Ltd.: Bristol, UK, 2020; Volume 973. [Google Scholar] [CrossRef]
- Goh, A.Y.; Yap, H.K.; Ramachandran, G.K.; Yeow, C.H. Application of novel graphite flex sensors in closed-loop angle feedback on a soft robotic glove for stroke rehabilitation. J. Prosthetics Orthot. 2020, 32, 272–285. [Google Scholar] [CrossRef]
- Guo, N.; Sun, Z.; Wang, X.; Yeung, E.H.K.; To, M.K.T.; Li, X.; Hu, Y. Simulation analysis for optimal design of pneumatic bellow actuators for soft-robotic glove. Biocybern. Biomed. Eng. 2020, 40, 1359–1368. [Google Scholar] [CrossRef]
- Kavindya, P.; Awantha, W.V.I.; Wanasinghe, A.T.; Kulasekera, A.L.; Chathuranga, D.S.; Senanayake, B. Evaluation of Hand Tremor Frequency among Patients in Sri Lanka using a Soft Glove. In Proceedings of the MERCon 2020—6th International Multidisciplinary Moratuwa Engineering Research Conference, Moratuwa, Sri Lanka, 28–30 July 2020; pp. 301–306. [Google Scholar] [CrossRef]
- Skaramagkas, V.; Andrikopoulos, G.; Manesis, S. An Experimental Investigation of Essential Hand Tremor Suppression via a Soft Exoskeletal Glove. In Proceedings of the European Control Conference 2020, ECC 2020, St. Petersburg, Russia, 12–15 May 2020; pp. 889–894. [Google Scholar]
- Awantha, W.V.I.; Wanasinghe, A.T.; Kavindya, A.G.P.; Kulasekera, A.L.; Chathuranga, D.S. A Novel Soft Glove for Hand Tremor Suppression: Evaluation of Layer Jamming Actuator Placement. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics, RoboSoft 2020, New Haven, CT, USA, 15 May–15 July 2020; pp. 440–445. [Google Scholar] [CrossRef]
- Hameed, H.K.; Hassan, W.Z.W.; Shafie, S.; Ahmad, S.A.; Jaafar, H.; Mat, L.N.I.; Alkubaisi, Y. Identifying the best forearm muscle to control soft robotic glove system by using a single sEMG channel. In Proceedings of the 2020 Advances in Science and Engineering Technology International Conferences, ASET 2020, Dubai, United Arab Emirates, 4 February–9 April 2020. [Google Scholar] [CrossRef]
- Radder, B.; Prange-Lasonder, G.B.; Kottink, A.I.R.; Holmberg, J.; Sletta, K.; Van Dijk, M.; Meyer, T.; Buurke, J.H.; Rietman, J.S. The effect of a wearable soft-robotic glove on motor function and functional performance of older adults. Assist. Technol. 2020, 32, 9–15. [Google Scholar] [CrossRef]
- Setiawan, J.D.; Ariyanto, M.; Nugroho, S.; Munadi, M.; Ismail, R. A soft exoskeleton glove incorporating motor-tendon actuator for hand movements assistance. Int. Rev. Autom. Control. 2020, 13, 1–11. [Google Scholar] [CrossRef]
- Zhou, Y.M.; Wagner, D.; Nuckols, K.; Heimgartner, R.; Correia, C.; Clarke, M.; Orzel, D.; O’Neill, C.; Solinsky, R.; Paganoni, S.; et al. Soft robotic glove with integrated sensing for intuitive grasping assistance post spinal cord injury. In Proceedings of the IEEE International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019; pp. 9059–9065. [Google Scholar] [CrossRef]
- Hameed, H.K.; Hassan, W.Z.W.; Shafie, S.; Ahmad, S.A.; Jaafar, H. Soft robotic glove system controlled with amplitude independent muscle activity detection algorithm by using single sEMG channel. In Proceedings of the 2018 IEEE 5th International Conference on Smart Instrumentation, Measurement and Application, ICSIMA 2018, Songkhla, Thailand, 28–30 November 2018; pp. 28–30. [Google Scholar] [CrossRef]
- Thalia, D.P.; Risangtuni, A.G. PID control for soft actuator pneumatic glove. AIP Conf. Proc. 2019, 2088, 020027. [Google Scholar] [CrossRef]
- Takahashi, N. A Novel Soft Exoskeleton Glove for Motor Skill Acquisition Similar to Anatomical Structure of Forearm Muscles. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 1568–1569. [Google Scholar]
- Guo, Y.; Xu, F.; Song, Y.; Cao, X.; Meng, F. A soft robotic glove for hand rehabilitation using pneumatic actuators with variable stiffness. In International Conference on Intelligent Robotics and Applications; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2019; pp. 119–129. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Galli, L.; Chiaradia, D.; Frisoli, A.; Braghin, F.; Masia, L. A soft tendon-driven robotic glove: Preliminary evaluation. Biosyst. Biorobotics 2019, 21, 329–333. [Google Scholar] [CrossRef]
- Chua, M.C.H.; Lim, J.H.; Yeow, R.C.H. Design and Characterization of a Soft Robotic Therapeutic Glove for Rheumatoid Arthritis. Assist. Technol. 2019, 31, 44–52. [Google Scholar] [CrossRef]
- Jiralerspong, T.; Heung, K.H.L.; Tong, R.K.Y.; Li, Z. A Novel Soft Robotic Glove for Daily Life Assistance. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Enschede, The Netherlands, 26–29 August 2018; pp. 671–676. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, D.; Wang, Z.; Wang, Y.; Wen, L.; Zhang, Y. A two-fingered force feedback glove using soft actuators. In Proceedings of the IEEE Haptics Symposium, HAPTICS, San Francisco, CA, USA, 25–28 March 2018; pp. 186–191. [Google Scholar] [CrossRef]
- Wang, B.; McDaid, A.; Aw, K.C.; Biglari-Abhari, M. Design and development of a skinny bidirectional soft glove for post-stroke hand rehabilitation. In Proceedings of the 2017 Intelligent Systems Conference, IntelliSys 2017, London, UK, 7–8 September 2017; pp. 979–987. [Google Scholar] [CrossRef]
- Chatterjee, S.; Hore, D.; Arora, A. A wearable soft pneumatic finger glove with antagonistic actuators for finger rehabilitation. In Proceedings of the 2nd International Conference on Communication and Electronics Systems, ICCES 2017, Coimbatore, India, 19–20 October 2017; pp. 341–345. [Google Scholar] [CrossRef]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Yeow, C.H. Design and preliminary feasibility study of a soft robotic glove for hand function assistance in stroke survivors. Front. Neurosci. 2017, 11, 547. [Google Scholar] [CrossRef]
- Yap, H.K.; Sebastian, F.; Wiedeman, C.; Yeow, C.H. Design and characterization of low-cost fabric-based flat pneumatic actuators for soft assistive glove application. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, London, UK, 17–20 July 2017; pp. 1465–1470. [Google Scholar] [CrossRef]
- Jamil, B.; Choi, Y. Soft pneumatic glove for grasping power improvement. In Proceedings of the 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence, URAI 2017, Jeju, Koream, 28 June–1 July 2017; pp. 690–691. [Google Scholar] [CrossRef]
- Low, J.H.; Lee, W.W.; Khin, P.M.; Thakor, N.V.; Kukreja, S.L.; Ren, H.L.; Yeow, C.H. Hybrid Tele-Manipulation System Using a Sensorized 3-D-Printed Soft Robotic Gripper and a Soft Fabric-Based Haptic Glove. IEEE Robot. Autom. Lett. 2017, 2, 880–887. [Google Scholar] [CrossRef]
- Popov, D.; Gaponov, I.; Ryu, J.H. Portable exoskeleton glove with soft structure for hand assistance in activities of daily living. IEEE/ASME Trans. Mechatron. 2017, 22, 865–875. [Google Scholar] [CrossRef]
- Haghshenas-Jaryani, M.; Nothnagle, C.; Patterson, R.M.; Bugnariu, N.; Wijesundara, M.B.J. Soft robotic rehabilitation exoskeleton (rehab glove) for hand therapy. In Proceedings of the ASME Design Engineering Technical Conference. American Society of Mechanical Engineers (ASME), Cleveland, Ohio, USA, 6–9 August 2017; Volume 3. [Google Scholar] [CrossRef]
- Yi, J.; Shen, Z.; Song, C.; Wang, Z. A soft robotic glove for hand motion assistance. In Proceedings of the 2016 IEEE International Conference on Real-Time Computing and Robotics, RCAR 2016, Angkor Wat, Cambodia, 6–10 June 2016; pp. 111–116. [Google Scholar] [CrossRef]
- Yap, H.K.; Lim, J.H.; Goh, J.C.H.; Yeow, C.H. Design of a soft robotic glove for hand rehabilitation of stroke patients with clenched fist deformity using inflatable plastic actuators. J. Med. Devices Trans. ASME 2016, 10. [Google Scholar] [CrossRef]
- Biggar, S.; Yao, W. Design and Evaluation of a Soft and Wearable Robotic Glove for Hand Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1071–1080. [Google Scholar] [CrossRef] [PubMed]
- Xiloyannis, M.; Cappello, L.; Khanh, D.B.; Yen, S.C.; Masia, L. Modelling and design of a synergy-based actuator for a tendon-driven soft robotic glove. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Singapore, 26–29 June 2016; pp. 1213–1219. [Google Scholar] [CrossRef]
- Yap, H.K.; Ang, B.W.K.; Lim, J.H.; Goh, J.C.H.; Yeow, C.H. A fabric-regulated soft robotic glove with user intent detection using EMG and RFID for hand assistive application. In Proceedings of the Proceedings—IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 3537–3542. [Google Scholar] [CrossRef]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Low, F.Z.; Goh, J.C.H.; Yeow, R.C.H. MRC-glove: A fMRI compatible soft robotic glove for hand rehabilitation application. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Singapore, 11–14 August 2015; pp. 735–740. [Google Scholar] [CrossRef]
- In, H.; Kang, B.B.; Sin, M.; Cho, K.J. Exo-Glove: A wearable robot for the hand with a soft tendon routing system. IEEE Robot. Autom. Mag. 2015, 22, 97–105. [Google Scholar] [CrossRef]
- Michaud, H.O.; Teixidor, J.; Lacour, S.P. Soft flexion sensors integrating strechable metal conductors on a silicone substrate for smart glove applications. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Estoril, Portugal, 18–22 January 2015; pp. 760–763. [Google Scholar] [CrossRef]
- Kuusisto, J.; Ellman, A.; Reunamo, J.; Kuosa, J. Manipulating virtual objects with a haptic glove based on soft pneumatic muscles. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, San Diego, CA, USA, 30 August–2 September 2009; Volume 2, pp. 1549–1556. [Google Scholar] [CrossRef]
Figure 1.
Schematic summary of the review work: prospective and analytical review details.

Figure 2.
Overall amount of documents by type, according to the Scopus classification. The category Others collects two documents classified as Notes and two Errata.
Figure 2.
Overall amount of documents by type, according to the Scopus classification. The category Others collects two documents classified as Notes and two Errata.

Figure 3.
Evolution of documents in time, plotted in stacked fashion. In black dots and connecting lines the cumulative function. Products classes were merged combining articles (74) with reviews (0), and conference papers (73) with book chapters (6). The category Others collects documents classified as Notes (2) and Errata (2).
Figure 3.
Evolution of documents in time, plotted in stacked fashion. In black dots and connecting lines the cumulative function. Products classes were merged combining articles (74) with reviews (0), and conference papers (73) with book chapters (6). The category Others collects documents classified as Notes (2) and Errata (2).

Figure 4.
Flow chart which maps the selection process, with the number of records identified, included and excluded, and the reasons for exclusions.
Figure 4.
Flow chart which maps the selection process, with the number of records identified, included and excluded, and the reasons for exclusions.

Figure 5.
Adopted taxonomy for the prospective review.

Figure 6.
Adopted taxonomy for the analytical review.

Figure 7.
Distribution of documents by type according to the classification of the Scopus database.

Figure 8.
Number of published documents by year, collected by publication type. Classes are reported as a stack plot, and the total amount of products by year is reported in black line with dots.
Figure 8.
Number of published documents by year, collected by publication type. Classes are reported as a stack plot, and the total amount of products by year is reported in black line with dots.

Figure 9.
Distribution of the soft gloves among application fields.

Figure 10.
Evolution in time of the soft gloves application fields categories. Data are presented in stacked format, with the total amount of documents for each year in black line with dots.
Figure 10.
Evolution in time of the soft gloves application fields categories. Data are presented in stacked format, with the total amount of documents for each year in black line with dots.

Figure 11.
Distribution of the soft gloves among device function.

Figure 12.
Evolution in time of the soft gloves with respect to the device function. Data are presented in stacked format, with the total amount of documents for each year in black line with dots.
Figure 12.
Evolution in time of the soft gloves with respect to the device function. Data are presented in stacked format, with the total amount of documents for each year in black line with dots.

Figure 13.
Main focus of the analyzed documents.

Figure 14.
Evolution in time of the documents with respect to the device function. Data are presented in stacked format, with the total amount of documents for each year in black line with dots.
Figure 14.
Evolution in time of the documents with respect to the device function. Data are presented in stacked format, with the total amount of documents for each year in black line with dots.

Figure 15.
Distribution of the soft gloves among type.

Figure 16.
Evolution in time of the soft gloves with respect to the device type. Data are presented in stacked format, with the total amount of documents for each year in black line with dots.
Figure 16.
Evolution in time of the soft gloves with respect to the device type. Data are presented in stacked format, with the total amount of documents for each year in black line with dots.

Figure 17.
Rehabilitation vs assistance or both.

Figure 18.
Basic nomenclature for the hand articulations, with Distal (D-) and proximal (P-) inter-phalangeal (IP) articulations, and metacarpo-phalangeal (MCP) and carpo-metacarpal (CMC) articulations.
Figure 18.
Basic nomenclature for the hand articulations, with Distal (D-) and proximal (P-) inter-phalangeal (IP) articulations, and metacarpo-phalangeal (MCP) and carpo-metacarpal (CMC) articulations.

Figure 19.
Actuated fingers.

Figure 20.
Soft gloves for Rehabilitation or Assistance. (a) PneuNets based glove developed by Do et al. [25]. Reprinted/adapted with permission from Ref. [25]. 2021, IEEE. (b) Segmented PneuNets glove developed by Wang et al. [52]. Reprinted/adapted with permission from Ref. [52]. 2019, IEEE. (c) The PIY (Print-It-Yourself) soft glove of Ang and Yeow [43]. Reprinted/adapted with permission from Ref. [43]. 2017, IEEE. (d) Sensorized soft robotic glove based on pneumatic soft-and-rigid hybrid actuators for providing continuous passive motion in hand rehabilitation [47]. (e) MR-Glove (Magnetic Resonance Glove) developed by Yap et al. [45]. Reprinted/adapted with permission from Ref. [45]. 2017, IEEE.
Figure 20.
Soft gloves for Rehabilitation or Assistance. (a) PneuNets based glove developed by Do et al. [25]. Reprinted/adapted with permission from Ref. [25]. 2021, IEEE. (b) Segmented PneuNets glove developed by Wang et al. [52]. Reprinted/adapted with permission from Ref. [52]. 2019, IEEE. (c) The PIY (Print-It-Yourself) soft glove of Ang and Yeow [43]. Reprinted/adapted with permission from Ref. [43]. 2017, IEEE. (d) Sensorized soft robotic glove based on pneumatic soft-and-rigid hybrid actuators for providing continuous passive motion in hand rehabilitation [47]. (e) MR-Glove (Magnetic Resonance Glove) developed by Yap et al. [45]. Reprinted/adapted with permission from Ref. [45]. 2017, IEEE.

Figure 23.
Rehabilitative Systems for bilateral training and mirror therapy. (a) SExoG developed by Chen et al. [65] for bilateral training with sEMG signals. (b) Rehabilitation system for mirror therapy developed by Li et al. [30], based on 3D-printed soft actuators. Reprinted/adapted with permission from Ref. [30]. 2020, IEEE. (c) Hand rehabilitation system for mirror therapy. The possible hand gestures are classified with a ML algorithm based on ANNs. Reprinted/adapted with permission from Ref. [65]. 2020, IEEE. (d) Soft gloves developed by Gerges et al. controlled with sEMG signals, for mirror therapy implementation. Reprinted/adapted with permission from Ref. [66]. 2020, IEEE. (e) Fully fabric-based bidirectional soft robotic glove controlled by the signals of flex sensors in a data glove worn on the healthy hand, for bilateral training, developed by Yap et al. [67]. Reprinted/adapted with permission from Ref. [67]. 2017, IEEE.
Figure 23.
Rehabilitative Systems for bilateral training and mirror therapy. (a) SExoG developed by Chen et al. [65] for bilateral training with sEMG signals. (b) Rehabilitation system for mirror therapy developed by Li et al. [30], based on 3D-printed soft actuators. Reprinted/adapted with permission from Ref. [30]. 2020, IEEE. (c) Hand rehabilitation system for mirror therapy. The possible hand gestures are classified with a ML algorithm based on ANNs. Reprinted/adapted with permission from Ref. [65]. 2020, IEEE. (d) Soft gloves developed by Gerges et al. controlled with sEMG signals, for mirror therapy implementation. Reprinted/adapted with permission from Ref. [66]. 2020, IEEE. (e) Fully fabric-based bidirectional soft robotic glove controlled by the signals of flex sensors in a data glove worn on the healthy hand, for bilateral training, developed by Yap et al. [67]. Reprinted/adapted with permission from Ref. [67]. 2017, IEEE.

Figure 24.
Sensors types used in the soft gloves analyzed in the review.

Figure 27.
Distribution of the actuation technique used in the soft gloves of the revised articles.

Figure 28.
Distribution of actuators used in the soft gloves of the revised articles, divided into the following classes: soft bending actuators (SBAs), fiber reinforced SBAs, pneu-nets actuators, soft hoop-reinforced pneumatic actuators, McKibben muscles, positive–negative bellows pneumatic actuators, textile actuators with thermoplastic elastomers (TPE), electric actuators, and Others.
Figure 28.
Distribution of actuators used in the soft gloves of the revised articles, divided into the following classes: soft bending actuators (SBAs), fiber reinforced SBAs, pneu-nets actuators, soft hoop-reinforced pneumatic actuators, McKibben muscles, positive–negative bellows pneumatic actuators, textile actuators with thermoplastic elastomers (TPE), electric actuators, and Others.

Figure 29.
Fingers movement actuated by the soft glove. the class are identified as follows: extension refers to cases in which only extension is actuated; flexion refers to cases in which only flexion is actuated; flexion–extension: refers to cases in which both Extension and flexion are actuated (but non necessarily both actively).
Figure 29.
Fingers movement actuated by the soft glove. the class are identified as follows: extension refers to cases in which only extension is actuated; flexion refers to cases in which only flexion is actuated; flexion–extension: refers to cases in which both Extension and flexion are actuated (but non necessarily both actively).

Figure 30.
Main material of which the soft actuator is made. Silicon rubber mainly used have 30 Shore A hardness. TPU stands for Thermoplastic Polyurethan.
Figure 30.
Main material of which the soft actuator is made. Silicon rubber mainly used have 30 Shore A hardness. TPU stands for Thermoplastic Polyurethan.

Figure 31.
Comparison of distribution of the production techniques of soft pneumatic actuators.

Figure 33.
Soft glove actuation solutions. (A) Wire based actuation of the proposed by Mohammadi et al. in [41]. Letters (a–c) refer to the original source. Reprinted/adapted with permission from Ref. [41]. 2018, IEEE. (B) Haptic soft glove actuated through SMA springs [92]. (C) Thin pneumatic artificial muscles based glove (TPAMs) [61]. Reprinted/adapted with permission from Ref. [61]. 2019, IEEE.
Figure 33.
Soft glove actuation solutions. (A) Wire based actuation of the proposed by Mohammadi et al. in [41]. Letters (a–c) refer to the original source. Reprinted/adapted with permission from Ref. [41]. 2018, IEEE. (B) Haptic soft glove actuated through SMA springs [92]. (C) Thin pneumatic artificial muscles based glove (TPAMs) [61]. Reprinted/adapted with permission from Ref. [61]. 2019, IEEE.

Figure 34.
Distribution of implemented solutions for tendon-driven transmission.

Figure 35.
Control Techniques.

Table 1.
Reviews and articles with an in-depth analysis of the state of the art of soft gloves.
| Ref. | First Author | Time Interval | Processed Articles | Device Type | Main Topics | Device Purpose |
|---|---|---|---|---|---|---|
| [13] | Shahid, T. | 2008–2017 | 65 | Soft | Systematic review: actuation mode, mechanical and electrical attributes; Technological trend | Assistance, Rehabilitation |
| [9] | Chu, C.Y. | Until 2017 | 62 | Soft 1 | Comparison of different design aspects of 44 unique devices | Assistance, Rehabilitation |
| [7] | Du Plessis, T. | 2010–2020 | not declared | Soft and rigid | Actuation, power transmission, sensing, and control identified and discussed | Focus on Assistance and Rehabilitation |
| [14] | Quach, B.M. | 2010–2018 | 10 1 | Soft | Classification of 10 Soft robotic gloves found in the literature | Rehabilitation |
| [15] | Souhail, A. | 2002–2019 | 56 1 | Soft and rigid | Soft and rigid hand exoskeletons design main aspects and classification of 19 of them | Rehabilitation |
| [16] | Chiaradia, D. | Until 2018 | 31 1 | Soft | Review of wrist exoskeletons which analyzes the main characteristics and technological choices | Rehabilitation and Assistance |
| [10] | Yin, J. | Until 2021 | 240 1 | Soft | Review on experimental studies in soft materials for wearable sensing and haptic feedback in VR/AR applications | Haptic |
1 Not declared in the article, but seen from the references.
Table 2.
Main technical data of soft gloves. The abbreviations adopted in the table are: R = Rehabilitation, A = Assistance, DIP = distal interphalangeal, PIP = proximal interphalangeal, MCP = metacarpophalangeal.
Table 2.
Main technical data of soft gloves. The abbreviations adopted in the table are: R = Rehabilitation, A = Assistance, DIP = distal interphalangeal, PIP = proximal interphalangeal, MCP = metacarpophalangeal.
| Ref. | First Author | Application Field | Exerted Force/Torque | ROM | Weight | Maximum Speed | Others |
|---|---|---|---|---|---|---|---|
| [23] | Tang | R | 180 g | ||||
| [24] | Jiryaei | R | 550 g | ||||
| [25] | Do | R | 220 g | 180 | |||
| [26] | Chen | R and A | maximum force of 15 N | glove 100 g; actuation module 850 g (Li-ion batteries included) | |||
| [27] | Setiawan | R and A | DIP 68 | 2 DOF | |||
| [28] | Du | R | 1000 g | 148.3 | |||
| [29] | Takahashi | R and A | 8 N | 10 Hz | 20 DOF | ||
| [30] | Li | R | 36.9 N | 144 g | 10 DOF; average 0.8 s mirroring delay | ||
| [31] | Chen | R and A | DIP 1.82 Nm, PIP 1.44 Nm, MCP 1.18 Nm with 0.42 MPa | DIP 72, PIP 98, MCP 81 | 0.5 Hz | 3 DOF | |
| [32] | Gerez | R and A | 19.5 N max grasping | Abduction: Thumb/Index 73°, Index/Middle 34°, Middle/Ring 31°, and Ring/Pinky 30° | 90 g | 10 active DOF; 5 passive DOF | |
| [19] | Burns | R and A | glove 258 g; actuation system 2.2 kg | 10 DOF | |||
| [33] | Hu | R and A | actuator adduction/abduction force 8.1 N/5.7 N; flexion/extension force 4.6 N/1.9 N | 149 g; portable pneumatic box weighs 7.5 kg | 6 DOF | ||
| [34] | Ullah | R and A | 2.45 N at each finger 13 N total | 50 g | 5 DOF | ||
| [35] | Ismail | A | 600 g | 2 DOF | |||
| [36] | Liu | R | 2 DOF | ||||
| [37] | Kang | A | 20 N | PIP 55, MCP 58 | |||
| [38] | Wang | R | 19 N tip force, 600 g | 216 finger flexion | 237 g | 0.13 Hz | 6 DOF |
| [39] | Cappello | A | 15 N for object grasping at 172 kPa | glove 77 g; control box 5 kg | 4 DOF | ||
| [40] | Yi | R and A | up to 40 N at the fingertip | <50 g | |||
| [41] | Mohammadi | R and A | 22 N pinch force, 48 N power grasp force, hook grip up to 5 kg | 330g including battery | 4 active DOF | ||
| [42] | Kim | A | more than 50 N at the fingertip | ||||
| [43] | Ang | R | 41.8 ± 3.1 N maximum grip force | Index and thumb: DIP 23 ± 2.3°, PIP 85 ± 1.7°, MCP 27 ± 44.9° | entire system: 1.5 kg | 1 DOF | |
| [44] | Yao | A | 11 N maximum hook force produced by nine SMA | 85.03 g | |||
| [45] | Yap | R | total grip force 41.01 ± 2.73 N, total friction force 18.88 N with friction coefficient of 0.46 | DIP 34.6°, PIP 88.2°, MCP 34.6° | 180 g | 0.2–0.3 Hz | 4 DOF |
| [46] | Cao | R | 35 N max grasp force | 50 g | |||
| [47] | Haghshenas-Jaryani | R | DIP 68°, PIP 101°, MCP 84° | 5 DOF | |||
| [48] | Polygerinos | R and A | 8 N at the distal end | 50 g | the path of the actuators agrees with the path of the biological fingers | ||
| [49] | Delph | R | 15 N | ||||
| [50] | Kadowaki | A | 9 N with 200 kPa at fingers for flexion | 135 g |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Tiboni, M.; Amici, C. Soft Gloves: A Review on Recent Developments in Actuation, Sensing, Control and Applications. Actuators 2022, 11, 232. https://doi.org/10.3390/act11080232
AMA Style
Tiboni M, Amici C. Soft Gloves: A Review on Recent Developments in Actuation, Sensing, Control and Applications. Actuators. 2022; 11(8):232. https://doi.org/10.3390/act11080232
Chicago/Turabian StyleTiboni, Monica, and Cinzia Amici. 2022. "Soft Gloves: A Review on Recent Developments in Actuation, Sensing, Control and Applications" Actuators 11, no. 8: 232. https://doi.org/10.3390/act11080232
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.