
Sliding-Mode Control for PMLSM Position Control—A Review
by

Lijuan Yu
1,2,
Jie Huang
1,2,
Wei Luo
1,2,*,
Shuyuan Chang
1,2,
Huilu Sun
1,2 and
Hailong Tian
1,2 1
Key Laboratory of CNC Equipment Reliability, Ministry of Education, Jilin University, Changchun 130022, China
2
College of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China
*
Author to whom correspondence should be addressed.
Actuators 2023, 12(1), 31; https://doi.org/10.3390/act12010031
Submission received: 14 November 2022
/
Revised: 16 December 2022
/
Accepted: 4 January 2023
/
Published: 7 January 2023
(This article belongs to the Section Control Systems)
Abstract
:Owing to the competitive advantages of fast response speed, large pushing force, high reliability, and high precision, the permanent magnet linear synchronous motor (PMLSM) has played an increasingly vital role in various high-speed and high-precision control systems. However, PMLSM exhibits nonlinear behavior in actual operation, and position tracking precision is negatively affected by friction, load changes, and other external disturbances. To meet the growing demand and solve the position tracking control problem for the PMLSM, the control system is critical. Sliding-mode control (SMC) has been used extensively in nonlinear control systems due to its superior performance characterized by simplicity, good dynamic response and insensitivity to parameter perturbation and external disturbances, and has been implemented in PMLSMs to track practical position. The objective of this article is to classify, scrutinize and review the major sliding-mode control approaches for position control of PMLSM. The three different conventional SMC methods, namely the boundary layer approach, the reaching law approach and the disturbance observer-based SMC, are discussed in detail. The four advanced forms of SMC, namely terminal SMC, super-twisting SMC, adaptive SMC and intelligent SMC, are also presented. A comparison of these approaches is given, in which the advantages and disadvantages of each approach are presented; additionally, they are presented in table form in order to facilitate reading. It is anticipated that this work will serve as a reference and provide important insight into position control of PMLSM systems.
1. Introduction
Permanent magnet linear synchronous motors (PMLSMs) can directly convert electrical energy into linear motion without mechanisms such as screws, belts, etc., in the middle. Compared with traditional rotary motors, PMLSMs overcome problems such as structural resonance and stiffness variation. Due to their many advantages, which include fast response speed, high pushing force, high reliability, and high precision [1,2], PMLSMs have been widely applied in various high-speed and high-precision control systems, such as machine tool direct feed drive systems [3], two-axis motion control systems [4], and three-dimensional (3-D) printers [5].
From a control engineering point of view, PMLSMs are multivariable, strongly coupled nonlinear systems, and their control performance is considerably affected by many nonlinear factors, such as friction, load change and force ripple [6]. Consequently, the improvement of the control performance has become an important topic in the PMLSM field. In recent years, various control methods have been proposed to enhance control performance, such as modified PID control [7], sliding-mode control (SMC) [8], adaptive control [9], fuzzy control [10], active disturbance rejection control [11], etc.
SMC is a special kind of the variable structure control. It originated in the late 1950s and its development has increased sharply since 1977 [12]. K. D. Young performed a comprehensive analysis of the sliding-mode control from an engineering point of view, in which the chattering generated by the sliding-mode control was precisely analyzed and evaluated. Seven solutions to chattering suppression in the continuous system were analyzed, and the sliding mode design was analyzed in three cases of the discrete system, which provides useful guidance for the application of the sliding-mode control in engineering [13]. Gao, W.B. proposed the probability of approach law for the first time, which improved the dynamic quality of approach motion [14]. In addition, many other scholars have proposed solutions to the chattering problem from different perspectives [15]. The essence of SMC is to force the system states to operate on a prescribed space surface called as sliding-mode surface in a desired manner, so that the reference signal can be tracked. Importantly, this control is discontinuous, as it switches between two control functions [16]. The SMC method has significant characteristics including simplicity, good dynamic response and insensitivity to parameter perturbation and external disturbances. Thus, SMC has been applied extensively to other nonlinear control systems, such as permanent magnet rotary motors [17,18] and permanent magnet synchronous generators [19].
The PMLSM is a typical nonlinear system, and is therefore more suitable for nonlinear control methods in the implementation of accurate position control. To date, SMC has been successfully utilized in the position control of PMLSMs, and numerous SMC methods have been employed, which can be divided roughly into two categories: conventional and advanced. Conventional SMC methods are simple and easy to implement, and include the boundary layer approach, the reaching law approach, and disturbance observer-based SMC, but the performance of chattering suppression and control accuracy is not satisfactory. To improve the control accuracy and reduce chattering, some modifications have been carried out, and advanced SMC methods have been developed, including terminal SMC, super-twisting SMC, adaptive SMC, and intelligent SMC. In light of the continuously expanding application of sliding-mode control in PMLSMs position control, this paper discusses the most advanced SMC methods. The rest of this paper is organized as follows. A PMLSM model is introduced in Section 2. In Section 3, the theory of SMC is introduced. In Section 4, a comprehensive review of sliding-mode control-based PMLSM position/velocity control approaches is presented. A discussion and conclusion are presented in Section 5 and Section 6, respectively. In addition, the full names of all abbreviations are given in Table 1.
2. Dynamic Model of PMLSM
PMLSMs are composed of permanent magnets, three-phase windings, a linear guide, etc. Its working principle is shown in Figure 1. When the three-phase sinusoidal current is applied to the primary three-phase winding, accordingly, the air-gap magnetic field is generated. Because the magnetic field moves in a straight line, it is also called the traveling wave magnetic field. This magnetic field interacts with the excitation field generated by the permanent magnet to generate electromagnetic thrust, such that the PMLSM is able to overcome a series of resistances and move in a straight line.
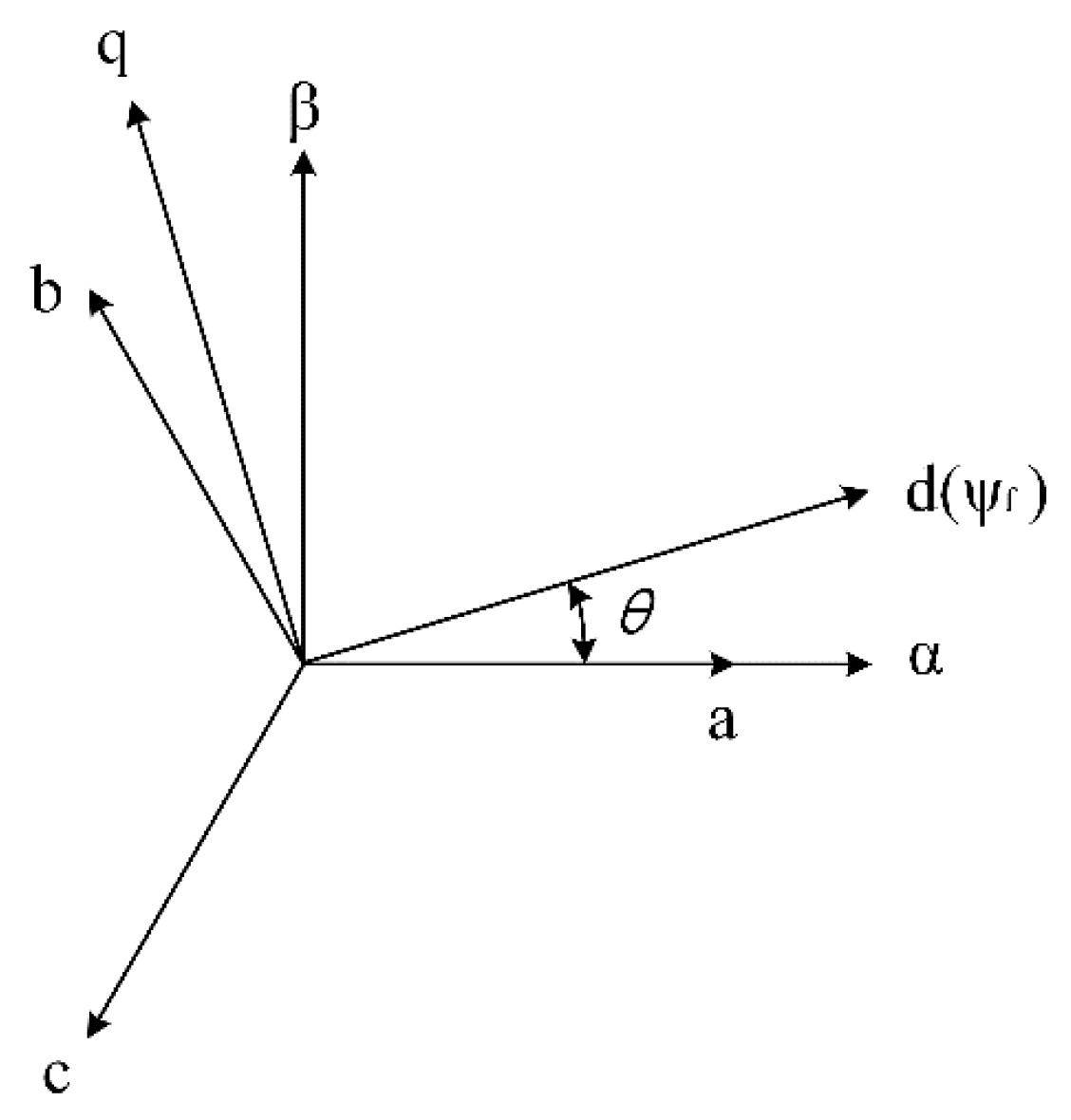
Three frames of reference are normally used to describe the dynamic model of a PMLSM: the a-b-c three-phase stationary reference frame, the stationary reference frame, and the d-q rotating reference frame. These three reference frames and their relationship are shown in Figure 2. In order to realize decoupling control, the motor model is transformed from the a-b-c coordinates to the d-q coordinates. The equations for a PMLSM in the d-q axis can be expressed as described below [20].
The stator current equation is as follows:
The stator flux equation is as follows:
The electromagnetic thrust force equation is as follows:
For a surface-mounted PMLSM, , so can be simplified as
The mechanical motion equation is as follows:
Stator voltage and current vector are defined as
where and denote transformations matrix
where ) and are the d axis and q axis current, voltage, and flux, respectively, and is the permanent magnet flux linkage. and denote the winding resistance and inductance, respectively, and and equivalent armature inductance in the d-q rotating reference frame. is the number of pole pairs, and is the pole pitch. represents the thrust force constant. is motor mass, is the viscous friction coefficient, is the linear velocity, and denotes the lumped uncertainties, including the nonlinear friction and load disturbance. and are three-phase voltages and currents respectively, and are the voltages and currents, respectively, in an stationary reference frame.
The design of a sliding-mode controller is always based on state-space equations, so it is necessary to establish the state-space equation of the PMLSM. The continuous-time dynamic equations can be expressed in the form
where and defined as follows:
where is the linear displacement, is the linear velocity, and and y are the input control signal and output control signal, respectively.
3. SMC Theory
3.1. Fundamental Theroy of SMC
Sliding-mode control (SMC) is a robust and effective control method for nonlinear systems suffering from parametric uncertainties and external unknown disturbances [13,21,22,23]. SMC essentially utilizes the discontinuous control signal to force the system states to operate on a predesigned surface, i.e., the occurrence of the so-called sliding mode dynamic or sliding motion is enforced. Due to the fact that sliding motion can be designed, it is insensitive to matched disturbances and uncertainties. The general structure of SMC is described below.
Assuming that the nonlinear system is of the form
where is the system state vector, is the control input variable, and denotes the disturbances and uncertainties, .
First, the switching function is defined as
and denotes the switching surface, also known as sliding-mode surface.
Then, the structure of sliding-mode control law is always
where , and is discontinuous around the sliding-mode surface.
With respect to system motion, a system controlled by SMC consists of two motion phases: (1) the reaching phase, in which the system states are driven to the sliding-mode surface from their initial states in a finite time; and (2) the sliding mode phase, in which the system exhibits sliding mode motion on the sliding-mode surface. Therefore, the SMC law (14) should ensure that the sliding-mode surface is reached in a finite time, along with the subsequent occurrence of the sliding mode. Meanwhile, the desired dynamic characteristics in the sliding mode phase are ensured by the sliding-mode surface.
3.2. SMC Design
Several SMC design methods have been proposed, and the key is to ensure the existence of a sliding mode on the sliding-mode surface [21]. Generally, the design procedure of SMC is divided into two main steps. The first step is to design the sliding-mode surface to ensure the desired dynamic behaviors, such as stability or tracking. The second step is to design the sliding-mode control law to drive the system states to the sliding-mode surface and maintain it there, thus satisfying the reachability and existence of the sliding mode. Note that the whole design procedure usually relies on Lyapunov stability theory [24].
At present, the known types of sliding-mode surface include linear and nonlinear types. Commonly, linear sliding-mode surfaces are expressed as
where is the system state, should be designed such that polynomial is Hurwitz, where p is the Laplace operator, and thus the sliding-mode surface is stable. For example, when , , should satisfy . Although the linear sliding-mode surface is simple and easy to implement, it has been proved to be less satisfactory in terms of convergence rate and accuracy. Therefore, many nonlinear sliding-mode surfaces, such as terminal sliding-mode surfaces, integral sliding-mode surfaces and fractional-order sliding-mode surfaces have been developed with the aim of improving dynamic performance. These surfaces will be described in detail in the following section.
In addition, a common application of SMC is tracking control, i.e., the main objective of SMC is to cause the output variables to track the desired state; therefore, tracking errors should converge to zero in a finite time. For this purpose, the sliding-mode surface can be constructed of error and a series of its derivative. The specific form is shown in Equation (16)
Note that the sliding mode variable s should converge to 0 and has a stable differential equation.
The second step is to design the SMC law. Two typical design strategies are introduced in the following.
(1) Equivalent control method: The structure of SMC law based on the equivalent control method is
where is a continuous component and is a discontinuous one, ensures that the system states remain on the sliding-mode surface, and forces the system states with arbitrary initial values to point toward the sliding-mode surface. Taking the system described in (12) as an example, the equivalent control is derived from the equivalent control method, which should satisfy the condition in the absence of lumped disturbances, i.e., is supposed. The tracking error is defined as and the sliding-mode surface is defined as
such that
where is assumed to be nonsingular.
The robust switching control term is obtained by ensuring that the so-called reachability condition holds, i.e., , which can be designed as follows:
where , .
Note that the sufficiency conditions for the existence and reachability of a sliding mode come from Lyapunov stability theory. If there is a positively defined Lyapunov function V(x) about s(x), and the derivative of V(x) with respect to time is negatively definite, the system will be stable under the condition , meaning that a sliding mode exists. The Lyapunov function is commonly defined as follows:
(2) Reaching law approach: The reaching law is a differential equation that directly dictates the dynamics of the switching function s(x), as proposed by Gao in [15]. The general form of the reaching law is
where and , , ,, , , , .
Several special cases in practical application are described below.
- (1)
- Constant rate reaching law:
- (2)
- Constant plus proportional rate reaching law:
- (3)
- Power rate reaching law:
The commonly used structure of control law (14) is not involved in the design process of SMC when utilizing the reaching law approach, and the reaching condition is also not explicitly used. The reaching law approach not only guarantees achieving the reachability condition, but also improves the dynamic quality of motion during the reaching phase.
It is worth mentioning that the well-known chattering problem is a prominent obstacle to the application of SMC in practical systems. The essential reason behind chattering is the discontinuity of control caused by the switching action, which is normally composed of the function. Therefore, many studies have used the boundary layer method and replaced the sign function with the saturation function to reduce or soften the chattering action. In addition, other modified methods, such as disturbance observer-based SMC, second-order SMC, adaptive SMC and intelligent SMC, are also common and typical.
4. SMC for Position Control of PMLSM
Over the last two decades, sliding-mode control (SMC) technology has been widely applied in PMLSMs for position/velocity control. Numerous SMC methods have been developed, and a comprehensive review of these is presented in this section. As shown in Figure 3, the adopted SMC methods can be roughly divided into two categories: conventional and advanced approaches. The former include the boundary layer approach, the reaching law approach, and disturbance observer-based SMC.
To make SMC more effective and accurate for application in PMLSMs, some modifications have been implemented, and advanced SMC methods have been proposed, which can be subdivided into terminal SMC, super-twisting SMC, adaptive SMC, and intelligent SMC.
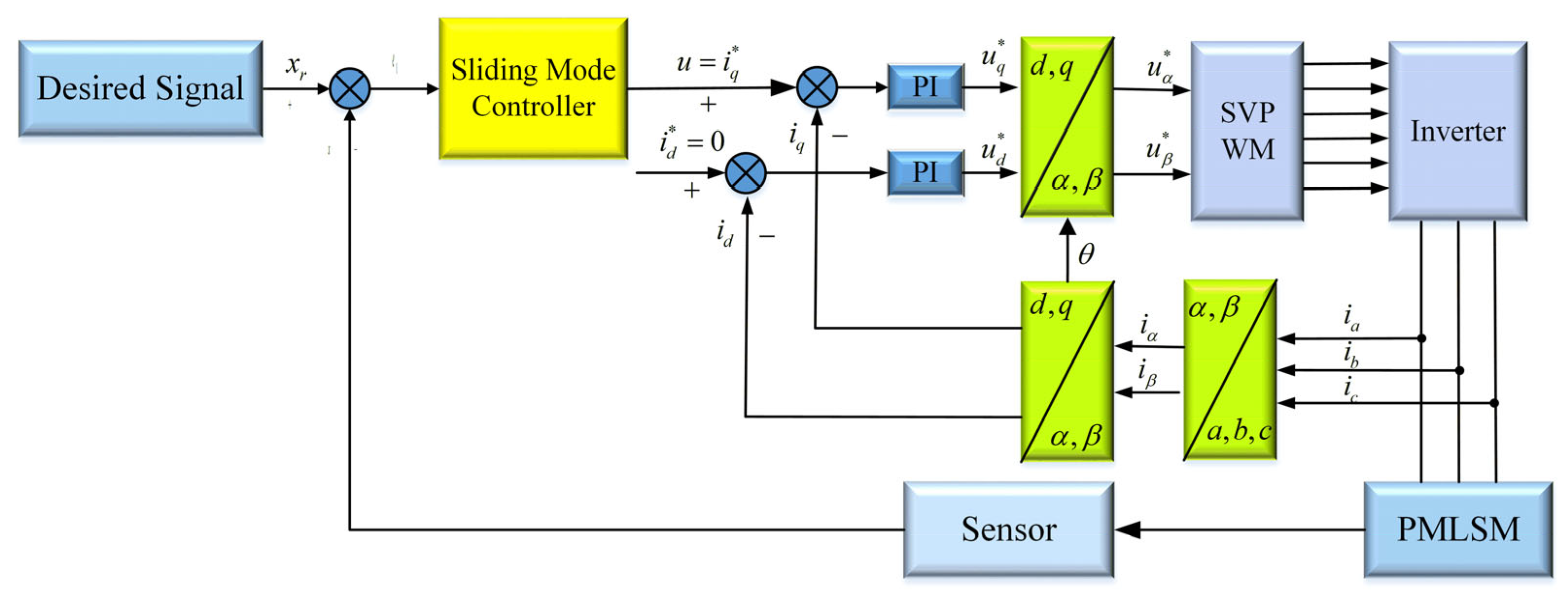
In addition, a block diagram of the SMC-based PMLSM position control scheme is shown in Figure 4.
4.1. Boundary Layer Approach
The boundary layer approach consists of inserting a boundary layer near the sliding surface so that a continuous control action replaces the discontinuous one when the system is inside the boundary layer [25]. More specifically, the sign function sign(s) of the discontinuous control component is often replaced with the saturation function sat(s), which can be expressed as
where denotes the boundary layer, . The essence of the saturation function is the adoption of the switching control outside the boundary layer and the linear feedback control inside the boundary layer.
In [26], an SMC method was proposed for position control of a PMLSM. In order to eliminate the chattering phenomenon, the authors adopted the sat function to replace the sign function of the control law, where the sat function was defined as
where d is a small positive constant that defines the boundary layer. The simulation and experimental results proved that the proposed method was able to provide fast response and good control performance with reduced chattering. Similarly, in order to mitigate the chattering effects, authors in [2] substituted the sign () in the control law for speed tracking with sat ().
In [27], a sliding-mode control with a double boundary layer was presented to cope with chattering and static friction simultaneously. A modified saturation function was used to replace the switching function, which was defined as
where and correspond to the widths of the outer and the inner boundary layer. Figure 5 shows the boundary layers and the sliding surface in the state plane. According to the reported experimental results, the presented control scheme demonstrates superior performance compared to the standard cascaded linear controllers.
However, the saturation function causes the boundary layer to be constant, resulting in the asymptotic stability of the system not being able to be guaranteed. Therefore, in work [28], a complementary sliding-mode control (CSMC) method utilizing an approach angle-based saturation function was developed for PMLSMs. This method was able to decrease the boundary layer with changes in state trajectory until it converged to the sliding surface. As reported, the system chattering phenomenon was effectively eliminated and the position tracking accuracy and robustness were improved. The comparison of the proposed control method with CSMC using the traditional saturation function and the hybrid controller (CSMC based on RWENN) demonstrated that it was able to achieve lower tracking errors and stronger robustness under the occurrence of uncertainties.
4.2. Reaching Law Approach
The reaching law approach aims to eliminate the chattering caused by nonideal reac-hing at the end of the reaching phase, and is able not only to establish the reaching condition, but also to specify the dynamic characteristics of the system during the reaching phase. In [29], an SMC controller was developed based on the reaching law to control the position of the PMLSM. In addition, an adaptive disturbance observer was developed to suppress external disturbances and parameter unertainties. As the authors reported, the simulation results demonstrated the excellent dynamic characteristics and robustness of the proposed control method. A variable-rate reaching law approach-based sliding-mode controller aimed at achieving higher system stability and improved robustness in PMLSM servo systems was proposed in [30]. The occurrence of the sliding motion and a reduction in chattering were obtained when using the proposed controller.
In [31], a sliding-mode observer (SMO) with a variable exponential reaching law was established to simultaneously suppress thrust ripple and parameter variation. A function term () associating the reaching state with the estimated error , which can change with the estimated value , thus efficiently suppressing the chattering problem. In addition, an improved sliding-mode observer with reduced chattering was also proposed in [32] for observing the real-time speed of a controllable-excitation linear synchronous motor. In order to balance the dilemma between the rapidity required for dynamic performance and the reduction of chattering, a new reaching law based on the sigmoid function and the power function was proposed. As reported, the proposed approaches were able to effectively suppress the chattering phenomenon and track the transient process rapidly and accurately. In [33], a discrete-time load thrust observer based on an improved sliding mode reaching law was designed to reduce the influence of load thrust mutation on the linear motor. The reaching law tended to zero with decreasing x(k), which effectively suppressed chattering.
4.3. Disturbance Observer-Based SMC
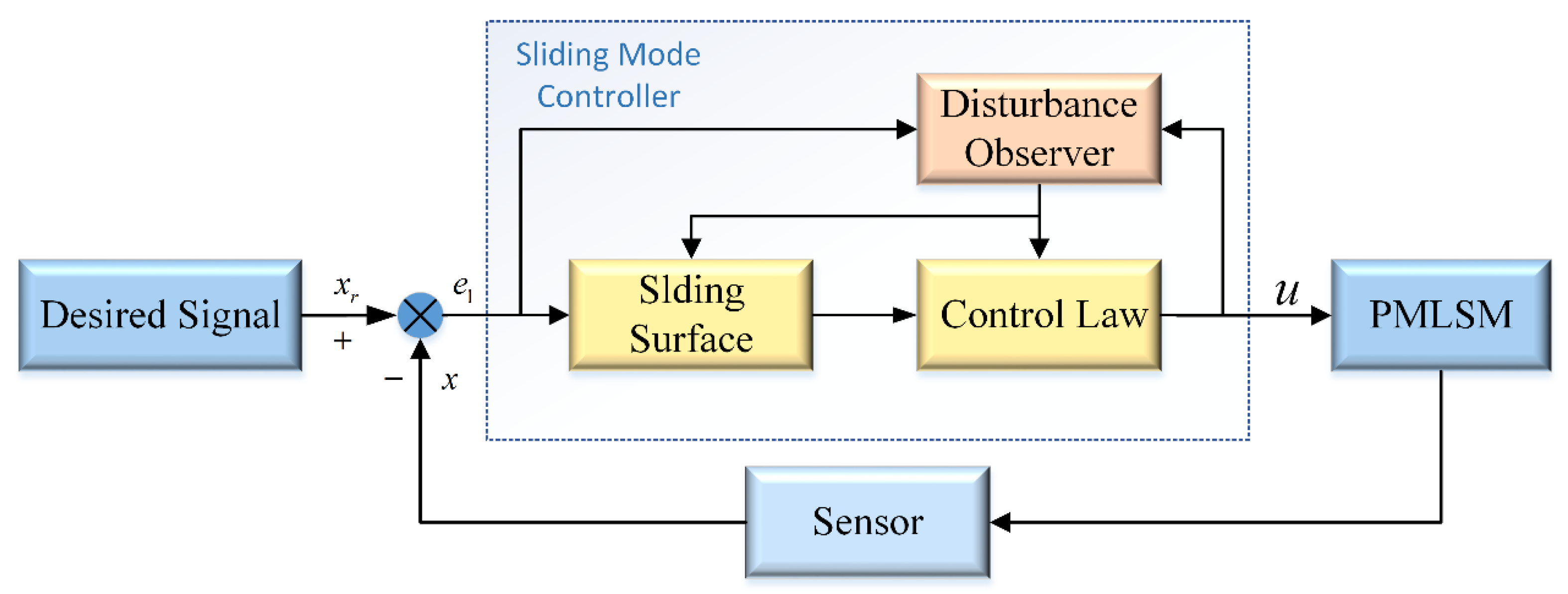
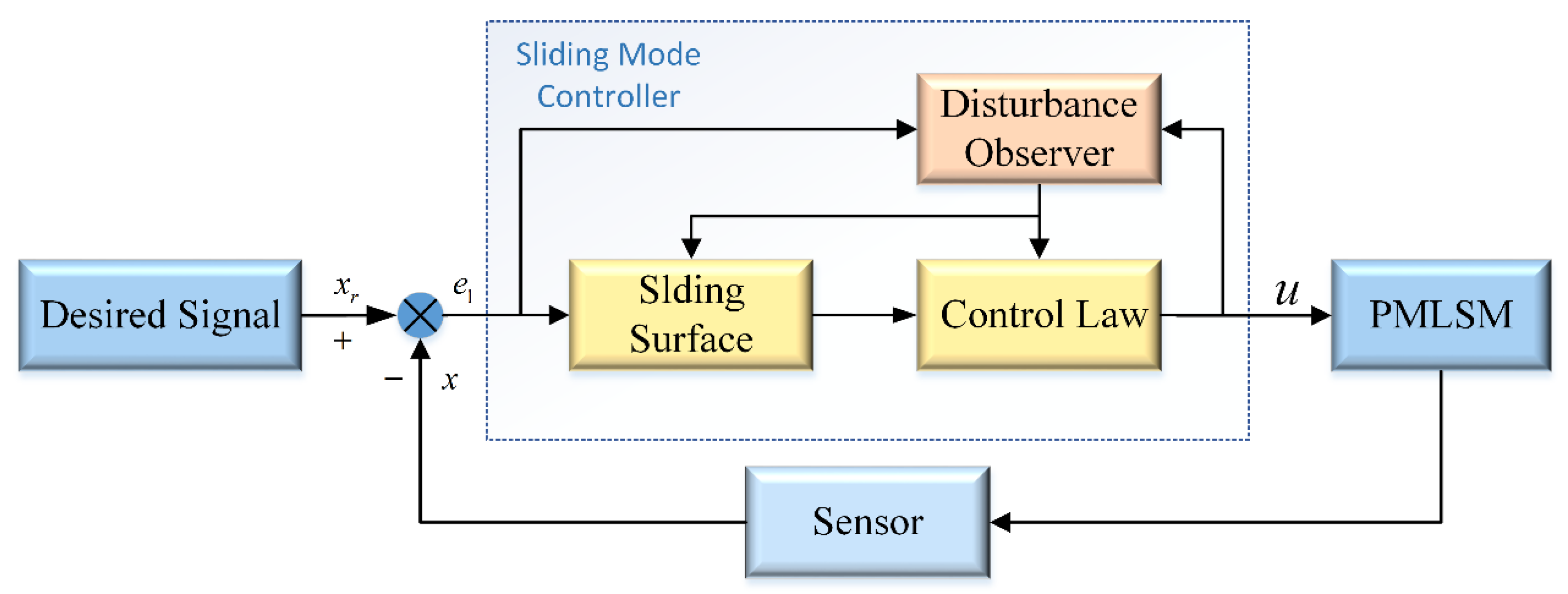
Due to the presence of various disturbances and uncertainties such as nonlinear friction, payload variations, and external disturbances in PMLSMs that deteriorate the control performance [7], a high control gain is typically employed for SMC controllers to eliminate the adverse effects of disturbances and uncertainties. However, switching gains that are too large will result in an undesired chattering phenomenon. To deal with such situations, the disturbance observer method has been proposed, which is able to effectively deal with the above problems by estimating the disturbances and performing compensation. A general block diagram of disturbance observer-based SMC for position control of PMLSMs is shown in Figure 6. The disturbance observer is an external loop for estimating the lumped disturbances from measurable variables and feeding the results back to the sliding-mode controller located in the inner loop in order to cause control actions to be taken to compensate for the influence of the disturbance.
Ref. [34] proposed an SMC method with observer-based disturbance compensation for a permanent magnet linear motor (PMLM). A reduced-order disturbance observer was employed to estimate the lumped disturbance force, including friction, external force, etc. The observer design was based on the dynamic state equations of the system. The key idea for the observer design was to extend the state equation, in which the dynamics of the state vector depend on a function , , with an integrator as disturbance model. The estimated lumped disturbance force was fed to the integral sliding-mode controller, which performed position control. An integral action ensured steady-state accuracy and a certain robustness of the position control, while also eliminating system chattering. The effectiveness of the proposed method was verified by means of a successful simulation. However, experimental validation of the algorithm is lacking.
In [35], a control strategy for the PMLM was designed for position control. A finite-time disturbance observer (FTDO) was employed to estimate the time-varying disturbance, and the estimation was fed to the position controller. The stability of the FTDO was confirmed by means of the Lyapunov method. A fast nonsingular-terminal sliding-mode controller (FNTSMC) was designed as a position controller to guarantee that the error between the real position and the reference would reach zero in a finite time. A comparison of the proposed controller with PID and the linear sliding-mode controller was performed in MATLAB/Simulink, and the results demonstrated that the proposed method exhibited better tracking accuracy, faster dynamic performance, and stronger robustness against lumped disturbances.
The combination of a modified complementary sliding-mode control (MCSMC) with a disturbance force observer was performed in [36] to track the reference position signal of a PMLSM. The disturbance force observer with mass identification (DFOB-MI) was used to estimate the total disturbance force with the exclusion of electromagnetic thrust. In contrast to other techniques, the output of the observer was fed to the current regulator as compensation input for system disturbances, rather than the sliding-mode controller located in the position loop. In addition, the mass identification based on the discrete MRAI method was designed to perform the online identification of the mass of the mover in order to reduce the negative influence of changes in mass. A simulation and experiments were conducted based on DSP TMS320f28335. The proposed method was able to achieve both superior tracking performance and strong robustness compared to the CSMC and hybrid CSMC methods, as demonstrated by the results of the simulation and experimental results.
Based on the nonlinear disturbance observer (NDOB), a backstepping sliding-mode controller was proposed in [37] for the purpose of performing tracking control in PMLSMs. The NDOB was an improved sliding-mode observer, and was developed to dynamically estimate the uncertainty and feed it to the controller. The combination of the backstepping sliding-mode control with the command filter ensured the good tracking performance of the PMLSM. The effectiveness and superiority of this method could be observed from the successful simulation results.
A robust recursive sliding-mode controller combined with an adaptive disturbance observer (RSM-ADO) was demonstrated in [38] to realize high-speed and high-precision control of a PMLSM. The proposed ADO was dependent on a sliding-mode structure with a nested adaptation algorithm, and therefore possessed the advantage of not requiring the upper bound information of the disturbance and its derivative in the design. Moreover, the observer was able to effectively adapt to disturbance variations, including the unmodeled dynamics and external disturbances, without the use of overestimation. The recursive integral terminal sliding-mode controller enabled finite-time convergence of the position tracking error on zero. The control input chattering was also reduced by the recursive structure. The proposed method was implemented using DSPACE DS1103 with a sampling time of 0.2 ms. The peak error of RSM-ADO was around 5 μm, which is much smaller than that for ARTSM when tracking a slope-varying triangular reference with an amplitude of 1000 μm. The experimental results demonstrated that the proposed method was able to achieve a reduced chattering effect and a stronger robustness in the presence of unknown external disturbances compared to two existing disturbance observers and the ARTSM controller.
To estimate and utilize matched and mismatched disturbances in PMLSM servo drive systems, reducing the conservativeness of the system under multiple disturbances, a double disturbance observer composed of a matched disturbance observer and a mismatched disturbance observer was introduced in [39]. The position controller was designed as a high-order fast nonsingular-terminal sliding-mode controller, ensuring the robustness of the PMLSM system and improving the tracking performance. The overall control of the motor position, speed and current was realized by adding feedback current on the sliding-mode surface. The control law was designed as , where consisted of the estimated disturbances, and aimed to resist the adverse effects of disturbances. The convergence and stability of the proposed method were demonstrated on the basis of Lyapunov theory. The control strategy was implemented on a linear motor utilizing CSPACE and hardware using a loop development experimental platform with TMS320F2812 DSP. The experimental results showed that the proposed control method had better tracking performance as well as stronger robustness to different types of disturbance when compared to the FNTSMC-HOSTO controller and the FNTSMC controller.
4.4. Terminal SMC
The terminal sliding-mode control (TSMC) strategy is a modification of the linear sliding-mode strategy. By introducing a nonlinear part, a terminal sliding surface is constructed, ensuring the convergence of the error signal in a finite time. Thus, it is able to overcome the characteristic asymptotic convergence of states when using a linear sliding-mode surface [40]. The traditional terminal sliding surface can be described by a first-order nonlinear differential equation as follows:
where , and are positive odd numbers. In sliding mode (29), the system state from any initial state converges to equilibrium () in a finite time determined by
The introduction of the nonlinear part () increases the convergence rate, but it is not optimal in terms of convergence time. The main reason for this is that it converges more slowly than the linear relation when the system approaches equilibrium. Therefore, a fast terminal sliding surface was proposed in the following form [41]:
where , p and q (p > q) are positive odd numbers.
The following can be obtained from (31):
The convergence time becomes
when the system state is far from the origin, the convergence time is determined by the terminal attractor (); whereas, when it approaches the origin, the convergence time is determined by . Thereby, fast and precise convergence to the equilibrium point can be achieved.
In common TSMC, the control singularity problem may occur around the equilibrium due to the negative fractional power. To avoid this problem, the so-called nonsingular TSMC was developed, which can be expressed as [42]
where ,, , .
Accordingly, the system state was able to converge to equilibrium () in a finite time
In addition, the nonsingular TSMC can be represented as follows [43]:
An integral terminal sliding-mode control for PMLMs to track the desired trajectory in a finite time in the presence of disturbances was proposed in [44]. The sliding surface consisted of the first derivative of the position tracking error and an integral term, whose specific form was
where ,, and . The signum function was replaced with a novel saturation function to reduce the chattering. The effectiveness of the proposed method was proved on the basis of simulation results.
In order to track the reference position signal of a linear motor (LM) quickly and accurately, a fast nonsingular-terminal sliding-mode control (FNTSMC) was studied in [45]. The sliding surface was defined as
where , ensuring finite-time convergence and overcoming the singular problem. The FNTSM control law was the linear combination of the equivalent control input and the reaching control input , effectively shortening the convergence time. In addition, a model-free robust exact differentiator was introduced as a velocity estimator to estimate the velocity, which was fed back to the controller. The control method was verified using a real-time DSP system (dSPACE-DS1103). Compared with NTSMC and control, the proposed FNTSMC was able to provide better tracking performance and stronger robustness, whether the load changed or not. Moreover, it exhibited significant superiority in terms of response to external disturbances.
A nonsingular fast terminal sliding-mode control method was presented in [46] for PMLMs. A new sliding surface composed of tracking error and its first derivative was introduced to speed up the convergence rate. The chattering was reduced by adopting the reaching law of the attractors to replace the normal switching term. The effectiveness and advantages were demonstrated on the basis of simulations. However, relevant experimental evidence was lacking.
An improved fast continuous-time nonsingular-terminal sliding-mode control was proposed in [35] for position tracking control of PMLMs. The sliding-mode surface consisted of tracking error () and its derivative in order to guarantee the finite-time convergence of the error system state (), which was designed as
The advantage of faster convergence rate compared with the traditional terminal sliding-mode control was achieved. The faster convergence rate and smaller steady-state error were observed on the basis of simulation results compared with PID controller. However, no experimental verification was performed.
In order to directly implement the SMC on the digital signal processor (usually DSP), a discrete-time fast terminal sliding-mode control for PMLMs was presented for practical position tracking control [9]. Firstly, the discrete-time model was given using Euler’s discretization method. A new discrete-time terminal sliding-mode surface was introduced to ensure that the tracking error was always bounded, and was chosen as
where and =,,, 0 < 1, h is the sampling interval. To further improve the accuracy, the delayed estimation method was adopted to estimate and compensate the disturbance. The robustness and stability were demonstrated, whereby the tacking error was able to converge to . The effectiveness of the proposed method was validated on the basis of simulation and experiments, and comparison with PID control and discrete-time control showed a smaller steady-state error and a better robustness to disturbances including variations in mass, friction and load.
Discrete-time SMC was also carried out in [47] to achieve the high-precision tracking control of a linear motor. A new discrete-time sliding-mode surface was designed based on fractional-order definition and the terminal sliding-mode technique, and can be described as follows:
where , guaranteeing higher tracking precision. In addition, a novel terminal sliding-mode-type reaching law was employed in the control law, which was based on equivalent control to shorten the convergence time. The theoretical analyses and experimental results demonstrated that the proposed control strategy was able to provide higher precision, faster response, and stronger robustness to uncertainties with different payloads when compared with conventional DTSMC.
In addition, a novel discrete-time fractional-order sliding-mode control was represented in [48] to achieve the desired tracking performance for a linear motor. The sliding surface was designed with a fractional-order term, as follows:
where ,, ,, to ensure faster convergence rate of the tracking error. Due to the global memory of the fractional calculus, this sliding surface was able to provide improved transient performance, and the stability condition of this sliding surface was given. The stability of the system was analyzed on the basis of Lyapunov theory and validated on the basis of simulations. The proposed controller was implemented on a real linear motor, and the experimental results demonstrated higher tracking precision and more noticeable robustness than the chattering-free discrete-time sliding-mode control and the discrete-time terminal sliding-mode control.
In [49], a discrete-time fast terminal sliding-mode control based on the nonlinear extended-state observer (NLESO) was reported to realize high-precision position tracking for PMLM systems. The fast terminal sliding surface was able to ensure the fast convergence of tracking error in a finite time. The total controller consisted of three terms, as follows:
where is the feedforward control corresponding to the NLESO for compensating the lumped disturbances. The finite-time convergence of the sliding variable is achieved by , which is a terminal sliding-mode-type reaching law. Fast response speed and high tracking performance were observed in the simulation results.
In [50], a fast nonsingular-terminal sliding mode (FNTSM) control with the extreme learning machine (ELM) was proposed to perform the position tracking of PMLMs. The FNTSM surface was represented as follows:
where
The sliding mode position controller consists of three terms, as follows:
where is the equivalent control term, which is adaptively estimated using the ELM algorithm, is employed to compensate for disturbances in order to alleviate the chattering, with the sign (s) being replaced by the continuous function sat(s). Finally, is the reaching control, which ensures the reachability of the sliding-mode surface in a finite number of steps. The control performance, including response time, steady-state error, and robustness, was validated on the basis of a comparison of the proposed control algorithm with the traditional SMC and PID control.
An improved nonsingular-terminal sliding-mode control combining time delay estimation (TDE) and the adaptive algorithm was proposed for the position tracking of PMLSMs in the presence of uncertainties [51]. Disturbances, including the unmodeled system and uncertainties, and the bounded control input gain, were estimated using the TDE method and fed back to the controller, thus improving the control accuracy. The gain of the robust control term was tuned using the adaptive method. The advantages of the proposed controller included higher tracking accuracy and stronger robustness. Experimental verification was performed using a real PMLSM control system based on DSP.
4.5. Super-Twisting SMC
Super-twisting sliding-mode control is a special case of second-order sliding-mode control. It can eliminate the chattering caused by first-order SMC while retaining its advantages, which include simplicity and strong robustness [52]. In addition, compared with other second-order SMC algorithms, the super-twisting algorithm only requires measurement of the sliding variable, and the time derivative of the sliding variable is not needed [53,54]. This means that super-twisting SMC is very simple and easy to implement. The super-twisting sliding-mode controller can be designed as follows:
where , and satisfies
It can be seen that the control law (47) is continuous, thus avoiding chattering.
In [55], a super-twisting sliding-mode control method with a defined boundary layer was designed for the high-precision position control of PMLSMs. The sliding-mode surface consisted of a linear combination of tracking error and its derivative. The control law was designed based on the super-twisting algorithm with a defined boundary layer around the sliding-mode surface, . The simulation and experimental results demonstrated higher steady-state position accuracy and less chattering.
In [18], a novel super-twisting nonsingular-terminal sliding-mode control was proposed for the accurate position tracking of PMLSMs under various uncertainties. The sliding-mode control law consisted of the equivalent control law and the switching control law designed based on the super-twisting algorithm, expressed as follows:
This control law can ensure that in a finite time and effectively eliminate the chattering phenomenon. Furthermore, a high-order sliding-mode observer can be used to estimate the system uncertainties and feed them back to the sliding-mode controller in order to improve the tracking accuracy and anti-interference ability. The experimental results illustrate that, compared with the NTSMC and STNTSMC methods, the proposed OSTNTSMC method is able to ensure the robustness of the system and the accuracy of its position tracking.
A high-order super-twisting observer with a nonsingular fast-terminal sliding-mode (NFTSM) controller was designed for the position regulation of PMLSMs in [56]. The incompleteness of state information resulting from lumped disturbances was estimated by the observer and was fed into the NFTSM controller, guaranteeing the convergence of tracking error. This control strategy was implemented on a real PMLSM experimental platform. The experimental results demonstrated faster response, higher precision, and stronger robustness compared to the conventional NFTSM control and the NTSM control.
In addition, super-twisting sliding-mode control was also used for the speed tracking of PMLSMs in [57,58]. In [57], a self-adaptive super-twisting sliding-mode controller was designed. The super-twisting sliding-mode controller was designed as follows:
where the gain parameters and are tuned using the adaptive approach. The control scheme was verified using the linear motor experimental platform. The reduction in chattering, robustness, and accurate speed- and position-tracking performance were validated on the basis of simulation and experimental results.
A super-twisting sliding-mode control strategy was presented in [58] for velocity regulation of PMLSM. The sliding surface was composed of an error in input velocity and a reference velocity. Moreover, the super-twisting sliding-mode observer was structured to suppress force disturbances in the velocity loop. A very small tracking error—limited below 0.04 mm/s—was reported on the basis of the experimental results. The proposed method had higher tracking precision than the conventional PID control.
4.6. Adaptive SMC
Adaptive sliding-mode control is the combination of adaptive control and SMC. In adaptive SMC, the control input signals (usually the switching gains) are tuned using the adaptive algorithm, thus avoiding the chattering phenomenon caused by high switching gains [59,60]. Regardless of the parameters used, external disturbances and other uncertainties of PMLM are always time-varying, and adaptive SMC is able to maintain good control performance by adjusting controller parameters accordingly in real time.
A discrete adaptive sliding-mode controller for high-precision motion control of a linear permanent magnet iron core synchronous motor was presented in [61]. The real-time gain tuning capability and robustness were achieved by combining the adaptive controller and sliding-mode controller. Use of the proposed controller ensured the performance of regulation and tracking tasks. Experimental results were presented demonstrating that the designed controller possessed fast response and strong robustness in the face of uncertainties and noise.
In [62], an adaptive fractional order terminal sliding-mode controller (AFOTSM) was developed to track the desired position signal of a linear motor. The FO terminal sliding mode was designed by introducing fractional order calculus, ensuring higher tracking precision than conventional terminal sliding-mode surfaces. An adaptive term was added into the switching control to weaken the effect of uncertainties. This proposed control strategy was applied on real LM-based motion. The experimental results showed that the AFOTSM was able to maintain higher tracking precision, i.e., errors lower than 0.005 mm without load and no more than 0.01 mm with 30% load, and ran more smoothly and stably than FOTSM, FNTSM, PID, and observer-based sliding-mode control (OSMC). Moreover, it possessed the greatest robustness against uncertainties.
A combination of recursive control and adaptive terminal sliding-mode control was developed in [63] to provide high-speed and high-precision control for LMs subject to friction, payload variations, and other disturbances. The sliding surfaces were designed as a recursive structure consisting of a fast nonsingular-terminal sliding function and a recursive integral terminal sliding mode in order to ensure the arrival of the sliding surfaces and the convergence of the tracking error. In addition, the reaching time was reduced by enforcing the system start on the sliding surface. The controller parameters were tuned using the adaptive algorithm. There was no discontinuous function, and thus the system was free of chattering. The tracking error under the proposed ARTSM controller was less than 1.7% of the reference amplitude without load. The experimental results demonstrated that the proposed control method possessed better tacking accuracy and faster disturbance rejection than the FNTSMC.
In [64], a robust tracking controller based on a barrier function adaptive sliding mode (BFASM) was proposed for a linear motor positioner in the presence of payload variations and unknown disturbances. The construction of the controller did not require any information regarding disturbances. By adopting the barrier function in the adaptive law, the control gain could be adaptively adjusted depending on the amplitude of the disturbance. Experiments were carried out using a real experiment platform based on a linear motor to verify the effectiveness of the BFASM controller. The experimental results demonstrated that the proposed controller was able to maintain tracking errors to within 40 m under disturbances varying with respect to payload or amplitude, and had better robustness and tracking performance than the adaptive piecewise scheme-based sliding-mode controller and the fast nonsingular-terminal sliding-mode controller.
4.7. Intelligent SMC
Intelligent algorithms, such as fuzzy mechanisms, neural networks control and adaptive neuro-fuzzy interference systems, are learning process-based approaches that have the property of universal approximation. In order to take advantage of intelligent algorithms’ capability to accurately approximate the system’s uncertainties and disturbances along with their boundaries, the intelligent SMC was proposed, which was able to realize the adaptive adjustment of the switching gain, consequently reducing chattering and increasing robustness [65,66]. In order to achieve position/velocity control of a PMLSM by adopting the intelligent SMC, the intelligent algorithms were mainly used to approximate disturbances or to optimize the gain of the controller parameters.
In [67], an intelligent complementary sliding-mode control was used to track periodic-reference trajectories for a PMLSM. The complementary sliding-mode control was developed to ensure the stability of the system and the convergence of tracking error between the reference position and the practical output position to the closed region in a finite time. The radial basis function network (RBFN), trained by adaptive learning algorithms, was adopted for the online estimation of the lumped uncertainties. The experimental results demonstrated the effectiveness of the proposed control method for different test signals, strokes, and load conditions.
An adaptive fuzzy fractional-order sliding-mode control for high-precision position control of PMLSMs was developed in [68]. In order to eliminate the effects of parameter variations and external disturbances in the system, a probabilistic fuzzy neural network (PFNN) was utilized for the online estimation of lumped uncertainties. For observation deviations caused by the limited network size, an adaptive fuzzy reaching regulator (AFRR) was designed to concurrently perform compensation while smoothing the hitting control, thus maintaining performance while reducing chattering. Adaptive tuning laws for the PFNN and AFRR were derived from the Lyapunov stability theorem. A comparison of the experimental results with PID control, fractional-order SMC with sign function, fractional-order SMC with saturation function, and adaptive self-tuning PID fuzzy sliding-mode control demonstrated that this method possessed the best control precision and robustness, with reduced chattering.
An adaptive neural network nonsingular fast terminal sliding-mode control for high-precision position tracking of PMLSMs in the presence of uncertainties was proposed in [69]. The nonsingular fast terminal sliding-mode control was responsible for the quick convergence of the system on the equilibrium point. The adaptive radial basis function (RBF) neural network was used to approximate the unknown function of the PMLSM, and an adaptive law was employed to estimate the upper bound of the total system uncertainty. The control law was a combination of the equivalent control law based on the RBF neural network estimate and the switching control law based on an adaptive law to tune the control gain, thus reducing the chattering and enhancing the robustness. The experimental results demonstrated higher tracking accuracy, faster response speed, and stronger robustness compared to the conventional nonsingular fast terminal sliding-mode control, as well as an improvement in the chattering.
The combination of second-order sliding-mode control (SOSMC) with recurrent radial basis function neural network (RRBFNN) was proposed for high-performance servo control of PMLSMs in [70]. SOSMC was able to eliminate the chattering problem and improve tracking accuracy. Due to the fact that the uncertainties are unknown in reality, negatively impacting control performance, the RRBFNN uncertainty observer was utilized to estimate the uncertainties. The control law consists of three parts, expressed as
where is the equivalent control, is the output control law of RRBFNN, and is the control law of the robust compensator for suppressing uncertainties such as approximation error. The experimental results demonstrated that the proposed control strategy had the best control effect in terms of chattering reduction and tracking accuracy improvement in a comparison with second-order sliding-mode control and second-order sliding-mode control based on a radial basis function neural network.
In [71], an intelligent backstepping terminal sliding-mode control (IBTSMC) method was proposed for the accurate position tracking of the PMLSM. Backstepping terminal sliding-mode control was employed to guarantee the convergence of the system and the tracking error (). The chattering effect was diminished by employing the hyperbolic tangent function tanh to replace the sign function. RBF neural network is adopted to estimate the uncertainty in the system, and the corresponding compensate term of the control law is designed for compensation. Accordingly, the chattering was reduced because high switching gain was not needed to address uncertainty. The effectiveness and superior control performance were proved by the experimental results.
A multi-kernel neural network-based sliding-mode control was presented for position tracking and disturbance suppression of PMLSMs [72]. The lumped disturbances were approximated by multi-kernel neural network (MNN) and compensated by the corresponding neural network control law. The sliding-mode control is designed with a dynamic boundary layer to ensure the convergence of the sliding mode variable and reduce the chattering by replacing the sign function with the saturation function. The control strategy was tested, and provided better performance under load variation and external disturbances than the adaptive sliding-mode control (ASMC) based on the RBF neural network.
5. Discussion
This paper presented a comprehensive review of state-of-art SMC for PMLSM position control. SMC methods can be divided into two main categories: conventional SMC and advanced SMC. The well-known advantage of conventional SMC is its simple implementation in practical applications, but it exhibits some weaknesses in terms of delivering the desired performance for high-precision position control of PMLSM. In this regard, different modifications of SMC have been proposed to eliminate the chattering phenomenon, increase the response speed, improve the tracking precision, and avoid the utilization of unnecessarily large control signals to overcome parametric uncertainties and external disturbances. Considering the seven reviewed SMC approaches, a comparative discussion of the advantages and the disadvantages of them is presented in this section, as illustrated in Table 2.
6. Conclusions
Due to the continuously expanding applications for PMLSMs, there have been tremendous efforts dedicated to improving the control performance. Possessing the advantages of good dynamic response and insensitivity to parameter perturbation and external disturbances, SMC is widely used in PMLSM. This paper presented different SMC methods utilized and implemented in PMLSMs position control. A dynamic model of a PMLSM was presented requiring position control based on SMC. In addition, a block diagram was also given for the SMC-based PMLSM position control scheme. When reviewing, analyzing and summarizing the relevant literature, we divided the SMC approaches applied to PMLSM position control into two categories according to the SMC approach adopted: conventional SMC and advanced SMC. Under conventional SMC methods, the boundary layer approach, the reaching law approach, and disturbance observer-based SMC were discussed in detail. Then, the advanced SMC methods were illustrated. In addition, we compared the different SMC methods, and identified their advantages and disadvantages in terms of chattering reduction, robustness, tracking precision, and so on. Generally, conventional SMC was simple to implement, but not satisfactory with respect to chattering reduction or tracking precision. While advanced SMC was able to achieve better tracking performance and chattering reduction, it is also more complicated, especially Intelligent SMC.
Author Contributions
All authors conceived the paper and designed the review study. Conceptualization L.Y., J.H. and W.L.; Funding acquisition, L.Y.; J.H. conducted the search and analysis of the related literature and drafted the paper; L.Y. and J.H. collected and analyzed the references and drafted the section on SMC for position control of PMLSMs; S.C. collected and analyzed the references and drafted the section on sliding-mode control theory; H.S. drafted the section on the dynamic PMLSM model; H.T. drafted the discussion sections. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Science and Technology Development Program of Jilin Province (20210201040GX): Research on Electronic High-Frequency Linear Actuator for Accelerated Fatigue Test of Automobile Parts.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Tan, K.K.; Huang, S.N.; Lee, T.H. Robust adaptive numerical compensation for friction and force ripple in permanent-magnet linear motors. IEEE Trans. Magn. 2002, 38, 221–228. [Google Scholar] [CrossRef]
- Cheema, M.A.M.; Fletcher, J.E.; Farshadnia, M.; Xiao, D.; Rahman, M.F. Combined Speed and Direct Thrust Force Control of Linear Permanent-Magnet Synchronous Motors with Sensorless Speed Estimation Using a Sliding Mode Control with Integral Action. IEEE Trans. Ind. Electron. 2017, 64, 3489–3501. [Google Scholar] [CrossRef]
- Stephens, M.A.; Manzie, C.; Good, M.C. Model Predictive Control for Reference Tracking on an Industrial Machine Tool Servo Drive. IEEE Trans. Ind. Inf. 2013, 9, 808–816. [Google Scholar] [CrossRef]
- El-Sousy, F.F.M.; Abuhasel, K.A. Nonlinear Robust Optimal Control via Adaptive Dynamic Programming of Permanent-Magnet Linear Synchronous Motor Drive for Uncertain Two-Axis Motion Control System. IEEE Trans. Ind. Appl. 2020, 56, 1940–1952. [Google Scholar] [CrossRef]
- Gieras, J.F.; Piech, Z.; Tomczuk, B.Z. Linear Synchronous Motors: Transportation and Automation Systems, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Tan, K.K.; Lee, T.H.; Dou, H.F.; Chin, S.J.; Zhao, S. Precision motion control with disturbance observer for pulsewidth-modulated driven permanent-magnet linear motors. IEEE Trans. Magn. 2003, 39, 1813–1818. [Google Scholar]
- Wang, J.; Li, D. Application of fuzzy PID control in PMLSM servo drive system. In Proceedings of the IEEE International Conference on Mechatronics & Automation, Beijing, China, 5 August 2015; pp. 6–10. [Google Scholar]
- Du, H.B.; Chen, X.P.; Wen, G.H.; Yu, X.H.; Lu, J.H. Discrete-Time Fast Terminal Sliding Mode Control for Permanent Magnet Linear Motor. IEEE Trans. Ind. Electron. 2018, 65, 9916–9927. [Google Scholar] [CrossRef]
- Ting, C.S.; Chang, Y.N.; Shi, B.W.; Lieu, J.F. Adaptive backstepping control for permanent magnet linear synchronous motor serv-o drive. IET Electr. Power. Appl. 2015, 9, 265–279. [Google Scholar] [CrossRef]
- Chen, S.Y.; Liu, T.S. Intelligent tracking control of a PMLSM using self-evolving probabilistic fuzzy neural network. IET Electr. Power Appl. 2017, 11, 1043–1054. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, J.W.; Wang, L.J.; Li, M.; Hu, Y.P. Combined Vector Resonant and Active Disturbance Rejection Control for PMSLM Current Harmonic Suppression. IEEE Trans. Ind. Inf. 2020, 16, 5691–5702. [Google Scholar] [CrossRef]
- Utkin, V.I. Survey Paper: Variable Structure Systems with Sliding Modes. IEEE Trans. Automat. Control 1977, 22, 212–222. [Google Scholar] [CrossRef]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef]
- Gao, W.B.; Hung, J.C. Variable Structure Control of Nonlinear Systems: A New Approach. IEEE Trans. Ind. Electron. 1993, 40, 45–55. [Google Scholar]
- Belai, I.; Huba, M.; Vranic, D. Comparing traditional and constrained disturbance-observer based positional control. Meas. Control. 2021, 54, 170–178. [Google Scholar] [CrossRef]
- Sabanovic, A. Variable Structure Systems With Sliding Modes in Motion Control—A Survey. IEEE Trans. Ind. Inf. 2011, 7, 212–223. [Google Scholar] [CrossRef]
- Belkhier, Y.; Shaw, R.N.; Bures, M.; Islam, M.R.; Bajaj, M.; Albalawi, F.; Alqurashi, A.; Ghoneim, S.S.M. Robust interconnection and damping assignment energy-based control for a permanent magnet synchronous motor using high order sliding mode approach and nonlinear observer. Energy Rep. 2022, 8, 1731–1740. [Google Scholar] [CrossRef]
- Belkhier, Y.; Achour, A.; Shaw, R.N.; Ullah, N.; Chowdhury, M.S.; Techato, K. Fuzzy supervisory passivity-based high order-sliding mode control approach for tidal turbine-based permanent magnet synchronous generator conversion system. Actuators 2021, 10, 92. [Google Scholar] [CrossRef]
- Belkhier, Y.; Achour, A.; Ullah, N.; Shaw, R.N.; Farooq, Z.; Ullah, A.; Alzaed, A.N. Intelligent energy-based modified super twisting algorithm and factional order PID control for performance improvement of PMSG dedicated to tidal power system. IEEE Access 2021, 9, 57414–57425. [Google Scholar] [CrossRef]
- Fu, D.X.; Zhao, X.M.; Zhu, J.G. A Novel Robust Super-Twisting Nonsingular Terminal Sliding Mode Controller for Permanent. Magnet Linear Synchronous Motors. IEEE Trans. Power Electron. 2021, 37, 2936–2945. [Google Scholar] [CrossRef]
- Decarlo, R.A.; Zal, S.H.; Matthews, G.P. Variable Structure Control of Nonlinear Multivariable Systems: A Tutorial. Proc. IEEE 1988, 76, 212–232. [Google Scholar] [CrossRef] [Green Version]
- Slotine, J.J.E. Sliding controller design for non-linear systems. Int. J. Control 1984, 40, 421–434. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Polyakov, A.; Fridman, L. Stability notions and Lyapunov functions for sliding mode control systems. J. Frankl. Inst. 2014, 351, 1831–1865. [Google Scholar] [CrossRef] [Green Version]
- Slotine, J.J.; Sastry, S.S. Tracking control of nonlinear systems using sliding surface with application to robot manipulator. Int. J. Control 1983, 38, 465–492. [Google Scholar] [CrossRef]
- Huang, Y.S.; Sung, C.C. Implementation of sliding mode controller for linear synchronous motors based on direct thrust control theory. IET Control Theory Appl. 2010, 4, 326–338. [Google Scholar] [CrossRef]
- Cupertino, F.; Naso, D.; Mininno, E.; Turchiano, B. Sliding-Mode Control with Double Boundary Layer for Robust Compensati-on of Payload Mass and Friction in Linear Motors. IEEE Trans. Ind. Appl. 2009, 45, 1688–1696. [Google Scholar] [CrossRef]
- Jin, H.Y.; Zhao, X.M. Approach Angle-Based Saturation Function of Modified Complementary Sliding Mode Control for PMLSM. IEEE Access 2019, 7, 126014–126024. [Google Scholar] [CrossRef]
- Lu, H.C.; Jiang, M.; Chen, Q.Q.; Wei, L.S.; Gao, W.G. Sliding Mode Control of PMLSM for High Speeding Gringding Machine. In Proceedings of the 2011 International Conference on Material Science and Engineering Technology, Zhengzhou, China, 13 November 2011; pp. 701–706. [Google Scholar]
- Mao, J.F.; Wu, G.Q.; Wu, A.H.; Zhang, X.D. Nonlinear Decoupling Sliding Mode Control of Permanent Magnet Linear Synchronous Motor Based on α-th Order Inverse System Method. In Proceedings of the 2011 International Conference on Advanced in Control Engineering and Information Science, CEIS, Dali, China, 18 August 2011; pp. 561–567. [Google Scholar]
- Wang, M.Y.; Yang, R.; Zhang, C.M.; Cao, J.W.; Li, L.Y. Inner Loop Design for PMLSM Drives with Thrust Ripple Compensation and High-Performance Current Control. IEEE Trans. Ind. Electron. 2018, 65, 9905–9915. [Google Scholar] [CrossRef]
- Shi, X.L.; Lan, Y.P.; Sun, Y.P.; Lei, C. A new reaching law for sliding mode observer of controllable excitation linear synchronous motor. Trans. Inst. Meas. Control. 2021, 44, 263–271. [Google Scholar] [CrossRef]
- Wang, L.J.; Zhao, J.W.; Zheng, Z.L. Robust Speed Tracking Control of Permanent Magnet Synchronous Linear Motor Based on a Discrete-Time Sliding Mode Load Thrust Observer. IEEE Trans. Ind. Appl. 2022, 58, 4758–4767. [Google Scholar] [CrossRef]
- Aschemann, H.; Haus, B.; Mercorelli, P. Sliding Mode Control and Observer-Based Disturbance Compensation for a Permane-nt Magnet Linear Motor. In Proceedings of the American Control Conference, Milwaukee, WI, USA, 27–29 June 2018; pp. 4141–4146. [Google Scholar]
- Gao, W.; Chen, X.P.; Du, H.B.; Bai, S. Position tracking control for permanent magnet linear motor via fast nonsingular terminal sliding mode control. J. Control Sci. Eng. 2018, 2018, 3813624. [Google Scholar] [CrossRef] [Green Version]
- Jin, H.Y.; Zhao, X.M.; Wang, T.H. Modified complementary sliding mode control with disturbance compensation for permanent magnet linear synchronous motor servo system. IET Electr. Power. Appl. 2020, 14, 2128–2135. [Google Scholar] [CrossRef]
- Song, H.J.; Liu, L.; Cai, M.J.; Shao, N. Backstepping Sliding Mode Control for the Displacement Tracking of Permanent Magnet Linear Synchronous Motor Based on Nonlinear Disturbance Observer. In Proceedings of the 11th International Conference on Modelling, Identification and Control, Tianjin, China, 13–15 July 2019; pp. 373–382. [Google Scholar]
- Shao, K.; Zheng, J.C.; Wang, H.; Xu, F.; Wang, X.Q.; Liang, B. Recursive sliding mode control with adaptive disturbance observer for a linear motor positioner. Mech. Syst. Signal Process. 2021, 146, 107014. [Google Scholar] [CrossRef]
- Zhang, K.; Wang, L.M.; Fang, X. High-Order Fast Nonsingular Terminal Sliding Mode Control of Permanent Magnet Linear Motor Based on Double Disturbance Observer. IEEE Trans. Ind. Appl. 2022, 58, 3696–3705. [Google Scholar] [CrossRef]
- Yu, S.H.; Yu, X.H.; Shirizadeh, B.; Man, Z.H. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Yu, X.H.; Man, Z.H. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I 2002, 49, 261–264. [Google Scholar]
- Feng, Y.; Yu, X.H.; Man, Z.H. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J.Y. Terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust. Nonlin. 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
- Mo, X.H.; Lan, Q.X. Finite-Time Integral Sliding Mode Control for Motion Control of Permanent-Magnet Linear Motors. Math. Probl. Eng. 2013, 2013, 567610. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.C.; Wang, H.; Man, Z.H.; Jin, J.; Fu, M.Y. Robust Motion Control of a Linear Motor Positioner Using Fast Nonsingular Terminal Sliding Mode. IEEE/ASME Trans. Mechatron. 2015, 20, 1743–1752. [Google Scholar] [CrossRef]
- Mao, Z.; Zheng, M.; Zhang, Y.J. Nonsingular Fast Terminal Sliding Mode Control of Permanent Magnet Linear Motors. In Proceedings of the 28th Chinese Control and Decision Conference, Yinchuan, China, 28–30 May 2016; pp. 649–653. [Google Scholar]
- Sun, G.H.; Ma, Z.Q.; Yu, J.Y. Discrete-Time Fractional Order Terminal Sliding Mode Tracking Control for Linear Motor. IEEE Trans. Ind. Electron. 2018, 65, 3386–3394. [Google Scholar] [CrossRef]
- Sun, G.H.; Wu, L.G.; Kuang, Z.; Ma, Z.Q.; Liu, J.X. Practical tracking control of linear motor via fractional-order sliding mode. Automatica 2018, 94, 221–235. [Google Scholar] [CrossRef]
- Hu, Y.H.; Wang, H. Discrete time fast sliding-mode control for permanent magnet linear motor with nonlinear extended state observer. In Proceedings of the 9th International Conference on Power and Energy Systems, Perth, Australia, 10–12 December 2019. [Google Scholar]
- Zhang, J.; Wang, H.; Cao, Z.W.; Zheng, J.C.; Yu, M.; Yazdani, A.; Shahnia, F. Fast nonsingular terminal sliding mode control for permanent-magnet linear motor via ELM. Neural Comput Appl. 2020, 32, 14447–14457. [Google Scholar] [CrossRef]
- Fu, D.X.; Zhao, X.M.; Yuan, H. Nonsingular Terminal Sliding Mode Control Based on Adaptive Time Delay Estimation for Permanent Magnet Linear Synchronous Motor. Int. J. Control Autom. 2022, 20, 24–34. [Google Scholar] [CrossRef]
- Bettayeb, M.; Djennoune, S. Design of sliding mode controllers for nonlinear fractional-order systems via diffusive representation. Nonlinear Dynam. 2016, 84, 593–605. [Google Scholar] [CrossRef]
- Chalaga, A.; Kamal, S.; Fridman, L.M.; Bandyopadhyay, B.; Moreno, J.A. Implementation of Super-Twisting Control: Super-Twisting and Higher Order Sliding-Mode Observer-Based Approaches. IEEE Trans. Ind. Electron. 2016, 63, 3677–3685. [Google Scholar] [CrossRef]
- Shtessel, Y.; Taleb, M.; Plestan, F. A novel adaptive-gain super twisting sliding mode controller: Methodology and application. Automatica 2012, 48, 759–769. [Google Scholar] [CrossRef]
- Tan, L.W.; Gao, J.; Luo, Y.H.; Zhang, L.Y. Super-twisting sliding mode control with defined boundary layer for chattering reduction of permanent magnet linear synchronous motor. Int. J. Mech. Sci. 2021, 35, 1829–1840. [Google Scholar] [CrossRef]
- Xu, D.Z.; Ding, B.; Jiang, B.; Yang, W.L.; Shi, P. Nonsingular Fast Terminal Sliding Mode Control for Permanent Magnet Linear Synchronous Motor via High-Order Super-Twisting Observer. IEEE/ASME Trans. Mechatron. 2022, 27, 1651–1659. [Google Scholar] [CrossRef]
- Li, Z.; Zhou, S.; Xiao, Y.; Wang, L.Y. Sensorless Vector Control of Permanent Magnet Synchronous Linear Motor Based on Self-Adaptive Super-Twisting Sliding Mode Controller. IEEE Access 2019, 7, 44998–45011. [Google Scholar] [CrossRef]
- Wang, M.Y.; Niu, Y.J.; Yang, R.; Tan, Q.; Jiang, J.L.; Li, L.Y. A Robust Double Closed-Loop Control Scheme for PMLSM Drives. IEEE Access 2018, 6, 62645–62654. [Google Scholar] [CrossRef]
- Baek, J.; Jin, M.; Han, S. A New Adaptive Sliding-Mode Control Scheme for Application to Robot Manipulators. IEEE Trans. Ind. Electron. 2016, 63, 3628–3637. [Google Scholar] [CrossRef]
- Jing, C.H.; Xu, H.G.; Niu, X.J. Adaptive sliding mode disturbance rejection control with prescribed performance for robotic manipulators. ISA Trans. 2019, 91, 41–51. [Google Scholar] [CrossRef]
- Chen, M.Y.; Lu, J.S. High-Precision Motion Control for a Linear Permanent Magnet Iron Core Synchronous Motor Drive in Position Platform. IEEE Trans. Ind. Inf. 2014, 10, 99–108. [Google Scholar] [CrossRef]
- Sun, G.H.; Ma, Z.Q. Practical Tracking Control of Linear Motor With Adaptive Fractional Order Terminal Sliding Mode Control. IEEE/ASME Trans. Mechatron. 2018, 22, 2643–2653. [Google Scholar] [CrossRef]
- Shao, K. Finite-Time Control of a Linear Motor Positioner Using Adaptive Recursive Terminal Sliding Mode. IEEE Trans. Ind. Electron. 2020, 67, 6659–6668. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.C.; Wang, H.; Wang, X.Q.; Lu, R.O.; Man, Z.H. Tracking Control of a Linear Motor Positioner Based on Barrier Function Adaptive Sliding Mode. IEEE Trans. Ind. Inf. 2021, 17, 7479–7488. [Google Scholar] [CrossRef]
- Qu, Q.X.; Zhang, H.G.; Yu, R.; Liu, Y. Neural network-based H-infinity sliding mode control for nonlinear systems with actuator faults and unmatched disturbances. Neurocomputing 2018, 275, 2009–2018. [Google Scholar] [CrossRef]
- Xu, N.; Chen, Y.; Xue, A.K.; Zong, G.D.; Zhao, X.D. Event-trigger-based adaptive fuzzy hierarchical sliding mode control of uncertain under-actuated switched nonlinear systems. ISA Trans. 2022, 124, 301–310. [Google Scholar] [CrossRef] [PubMed]
- Lin, F.J.; Hwang, J.C.; Chou, P.H.; Hung, Y.C. FPGA-Based Intelligent-Complementary Sliding-Mode Control for PMLSM Servo-Drive System. IEEE Trans. Power Syst. 2010, 25, 2573–2587. [Google Scholar] [CrossRef]
- Chen, S.Y.; Chiang, H.H.; Liu, T.S.; Chang, C.H. Precision Motion Control of Permanent Magnet Linear Synchronous Motors Using Adaptive Fuzzy Fractional-Order Sliding-Mode Control. IEEE/ASME Trans. Mechatron. 2019, 24, 741–752. [Google Scholar] [CrossRef]
- Zhao, X.M.; Fu, D.X. Adaptive Neural Network Nonsingular Fast Terminal Sliding Mode Control for Permanent Magnet Linear Synchronous Motor. IEEE Access 2020, 7, 180361–180372. [Google Scholar] [CrossRef]
- Zhao, X.M.; Wang, T.H.; Jin, H.Y. Intelligent second-order sliding mode control for permanent magnet linear synchronous motor servo systems with robust compensator. IET Electr. Power Appl. 2020, 14, 1661–1671. [Google Scholar] [CrossRef]
- Fu, D.X.; Zhao, X.M.; Yuan, H. High-precision motion control method for permanent magnet linear synchronous motor. IEICE Electron. Express 2021, 18, 20210097. [Google Scholar] [CrossRef]
- Wang, P.; Xu, Y.L.; Ding, R.Z.; Liu, W.K.; Shu, S.; Yang, X.F. Multi-Kernel Neural Network Sliding Mode Control for Permanent Magnet Linear Synchronous Motors. IEEE Access 2021, 9, 57385–57392. [Google Scholar] [CrossRef]
Figure 1.
Working principle of the PMLSM.
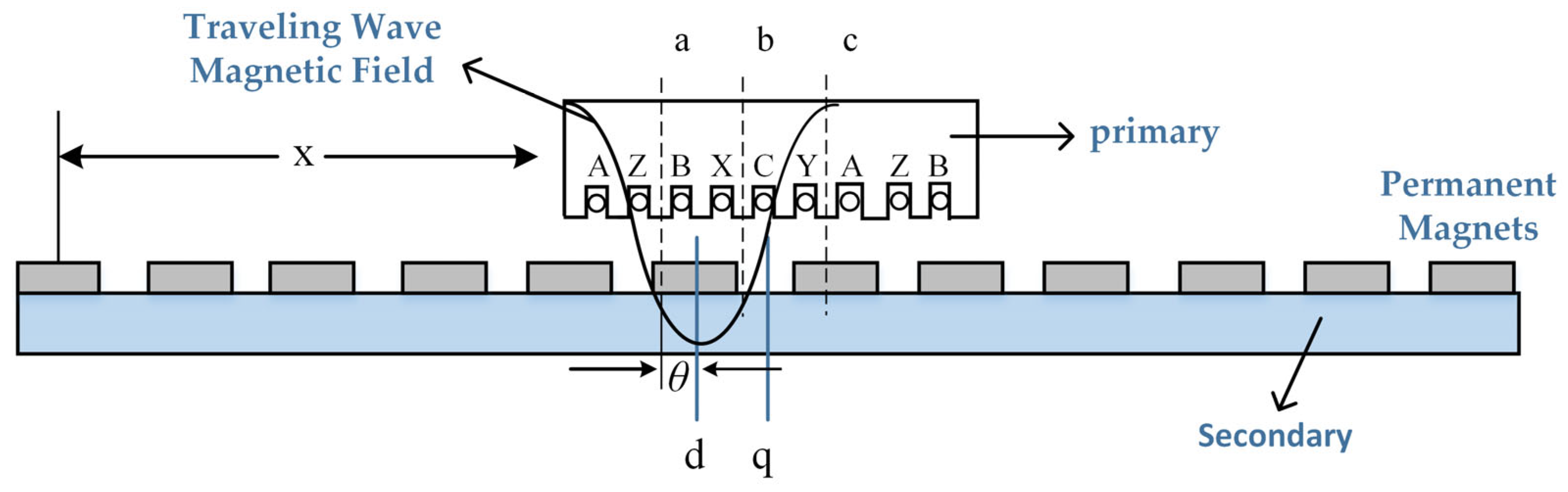
Figure 2.
Coordinate system of the PMLSM model: is the angle between the A-phase winding axis and the permanent magnet axis,
is the permanent magnet flux linkage.
Figure 2.
Coordinate system of the PMLSM model: is the angle between the A-phase winding axis and the permanent magnet axis,
is the permanent magnet flux linkage.

Figure 3.
Classification of SMC-based PMLSM position control.
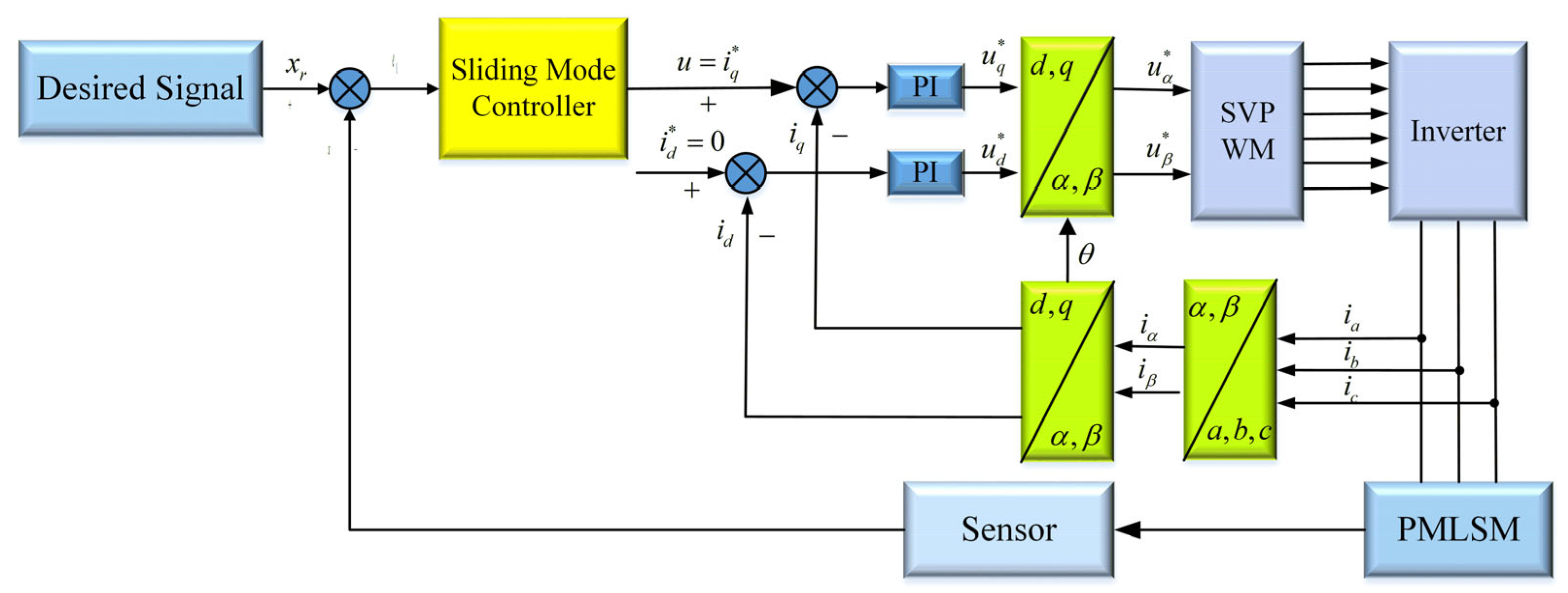
Figure 4.
Block diagram of the SMC-based PMLSM position control scheme.
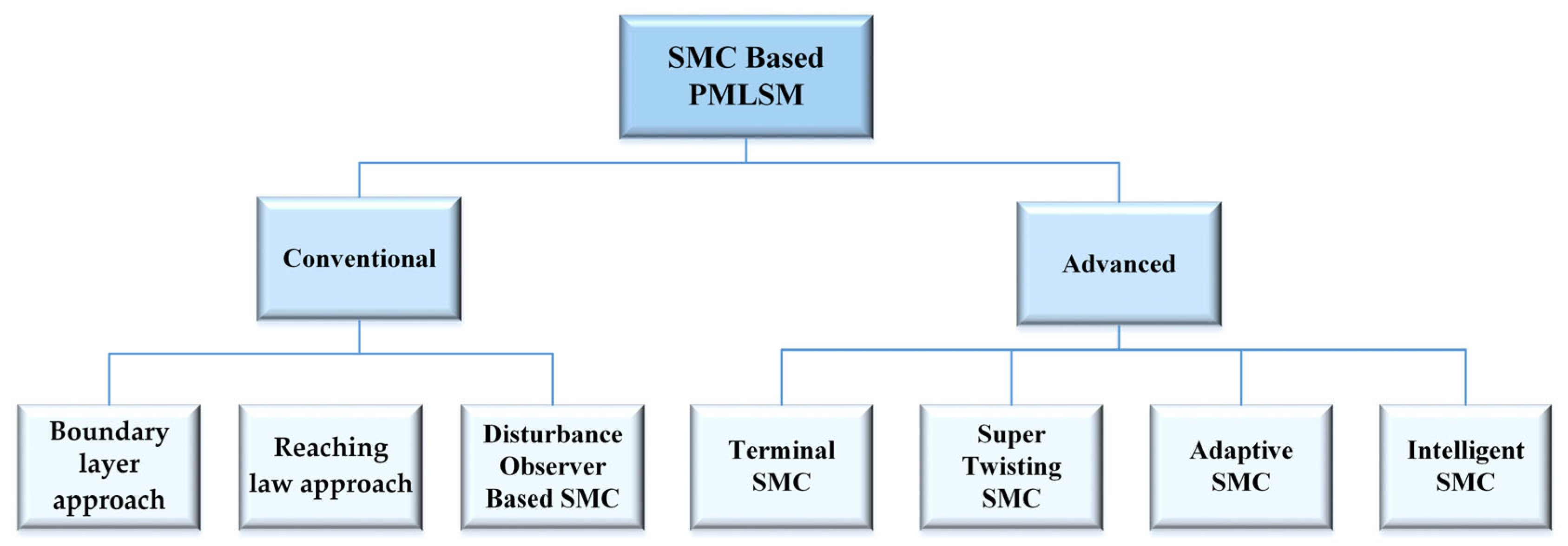
Figure 5.
Sliding surface and the boundary layers in the state plane. Reprinted with permission from Ref. [26]. Copyright 2009 IEEE.
Figure 5.
Sliding surface and the boundary layers in the state plane. Reprinted with permission from Ref. [26]. Copyright 2009 IEEE.
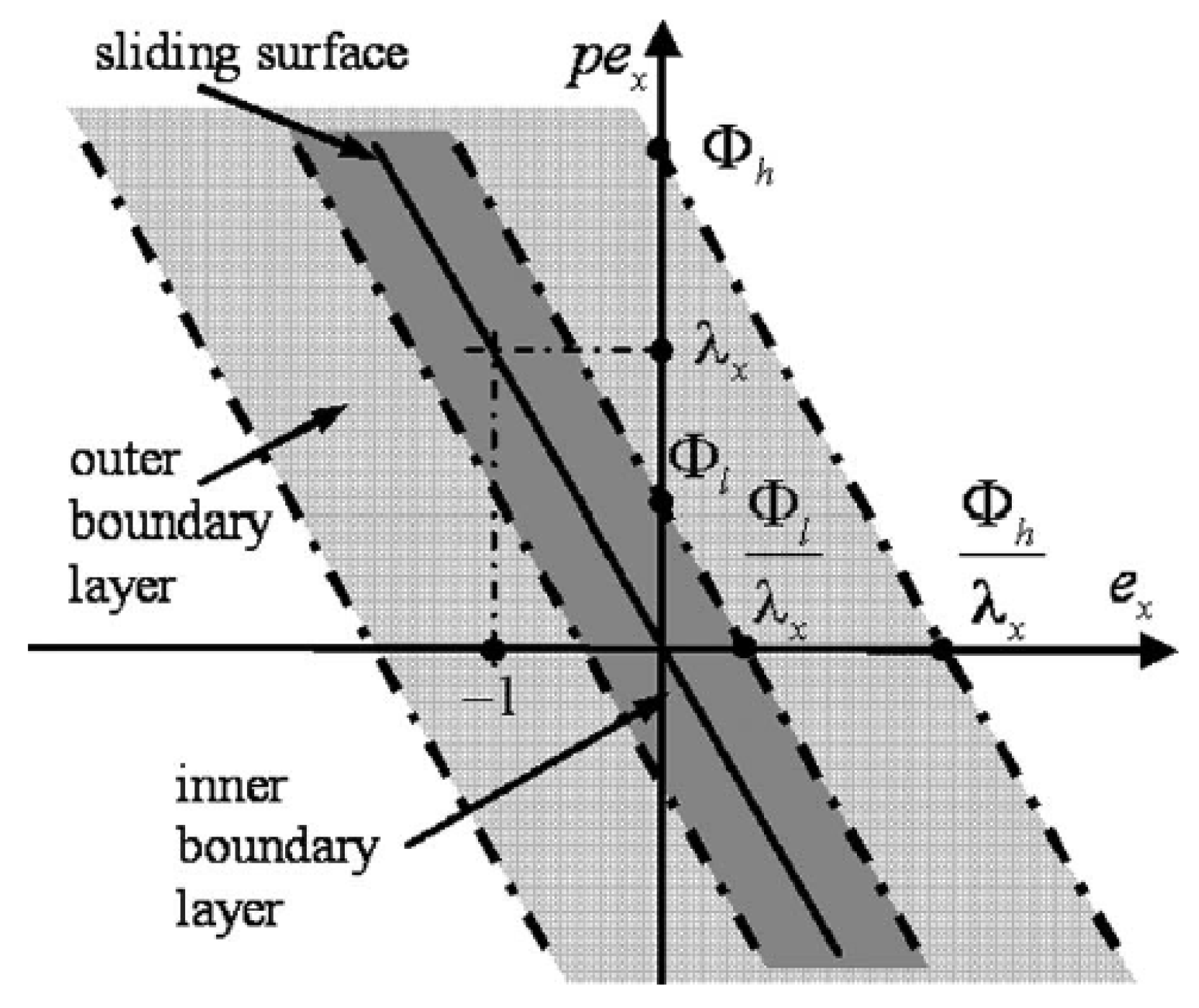
Figure 6.
The block diagram of the disturbance observer-based SMC for PMLSM position control.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Abbreviations and full name.
| Number | Abbreviations | Full Name |
|---|---|---|
| 1. | ADO | Adaptive Disturbance Observer |
| 2. | ARTSM | Adaptive Recursive Terminal Sliding Mode |
| 3. | AFOTSM | Adaptive Fractional Order Terminal Sliding-Mode Control |
| 4. | ASMC | Adaptive Sliding-Mode Control |
| 5. | BFASM | Barrier Function Adaptive Sliding Mode |
| 6. | CSMC | Complementary Sliding-Mode Control |
| 7. | DFOB-MI | Disturbance Force Observer with Mass Identification |
| 8. | DTSMC | Discrete Time Sliding-Mode Control |
| 9. | ELM | Extreme Learning Machine |
| 10. | FTDO | Finite-Time Disturbance Observer |
| 11. | FNTSMC | Fast Nonsingular-Terminal Sliding-Mode Control |
| 12. | FO | Fractional Order |
| 13. | HOSTO | High-Order Super-Twisting Sling Mode Observer |
| 14. | IBTSMC | Intelligent Backstepping Terminal Sliding-Mode Control |
| 15. | MNN | Multi-kernel Neural Network |
| 16. | MCSMC | Modified Complementary Sliding-Mode Control |
| 17. | MRAI | Minimum Route Advertisement Interval |
| 18. | NDOB | Nonlinear Disturbance Observer |
| 19. | NTSMC | Nonsingular Terminal Sliding Mode Control |
| 20. | NLESO | Nonlinear Extended State Observer |
| 21. | OSTNTSMC | Super-twisting Nonsingular-terminal Sliding-Mode Control with High-Order Sliding-Mode Observer |
| 22. | OSMC | Observer-based Sliding-Mode Control |
| 23. | PID | Proportional Integral Derivative |
| 24. | PFNN | Probabilistic Fuzzy Neural Networks |
| 25. | RWENN | Recurrent Wavelet-based Elman Neural Network |
| 26. | RSM-ADO | Sliding-Mode Controller combined with an Adaptive Disturbance Observer |
| 27. | RBFN | Radial- Basis Function-Network |
| 28. | RBF | Radial Basis Function |
| 29. | RRBFNN | Recurrent Radial Basis Function Neural Network |
| 30. | SMC | Sliding-Mode Control |
| 31. | SMO | Sliding-Mode Observer |
| 32. | STNTSMC | Super-Twisting Nonsingular-Terminal Sliding-Mode Control |
| 33. | SOSMC | Second-Order Sliding-Mode Control |
| 34. | TSMC | Terminal Sliding-Mode Control |
| 35. | TDE | Time Delay Estimation |
Table 2.
Comparative discussion of the reviewed SMC for position/velocity control of PMLSM.
| Approaches | Advantages | Disadvantages |
|---|---|---|
| Boundary layer approach |
|
|
| Reaching law approach |
|
|
| Disturbance observer-based SMC |
|
|
| Terminal SMC |
|
|
| Super-twisting SMC |
|
|
| Adaptive SMC |
|
|
| Intelligent SMC |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Yu, L.; Huang, J.; Luo, W.; Chang, S.; Sun, H.; Tian, H. Sliding-Mode Control for PMLSM Position Control—A Review. Actuators 2023, 12, 31. https://doi.org/10.3390/act12010031
AMA Style
Yu L, Huang J, Luo W, Chang S, Sun H, Tian H. Sliding-Mode Control for PMLSM Position Control—A Review. Actuators. 2023; 12(1):31. https://doi.org/10.3390/act12010031
Chicago/Turabian StyleYu, Lijuan, Jie Huang, Wei Luo, Shuyuan Chang, Huilu Sun, and Hailong Tian. 2023. "Sliding-Mode Control for PMLSM Position Control—A Review" Actuators 12, no. 1: 31. https://doi.org/10.3390/act12010031
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.