
Design of Farm Irrigation Control System Based on the Composite Controller
by
 , ,
, ,
Xue Li
1,2,
Zhiqiang Li
1,2,
Dongbo Xie
1,2,
Minxue Wang
1,2,
Guoan Zhou
1,2 and
Liqing Chen
1,2,* 1
College of Engineering, Anhui Agricultural University, Hefei 230036, China
2
Institute of Artificial Intelligence, Hefei Comprehensive National Science Center, Hefei 230088, China
*
Author to whom correspondence should be addressed.
Actuators 2023, 12(2), 81; https://doi.org/10.3390/act12020081
Submission received: 13 January 2023
/
Revised: 10 February 2023
/
Accepted: 11 February 2023
/
Published: 14 February 2023
(This article belongs to the Section Control Systems)
Abstract
:Farmland irrigation is an essential foundation for good crop growth, while traditional farmland irrigation techniques cannot fully consider the impact of factors such as natural precipitation and crop transpiration on crop growth, which can, to a certain extent, result in poor irrigation decisions and a complex farmland environment that cannot be monitored promptly, thereby reducing farmland production efficiency. This study designs a farmland irrigation control system based on a composite controller. Firstly, an irrigation control method is proposed to establish a prediction model for future rainfall and crop transpiration using historical meteorological data. The composite controller is designed based on the prediction model to realize an irrigation control operation with an irrigation value as the control quantity, a water and fertilizer machine, and a solenoid valve as the actuators. Secondly, an intelligent irrigation control cloud platform based on Java language is designed to monitor farm information and irrigation operation records in real-time to facilitate visual management. Finally, the prediction accuracy is high, based on the prediction model results, which can provide a specific reference basis. The superiority of the proposed controller is verified by simulation using MATLAB/Simulink. The results show that the proposed controller can be well suited for nonlinear control systems and has good control performance while ensuring high tracking accuracy, strong robustness, and fast convergence.
1. Introduction
Water scarcity is a global concern. As an industry that requires more water resources, the research on water-saving irrigation technology is the most urgent. Many scholars at home and abroad have conducted extensive in-depth research on water-saving irrigation technology, and a large number of research results have been achieved. Regarding the demand to model crop waters, some experts have developed the management-oriented cropping system model MODERATO [1]. Tolomio et al. [2] proposed a dynamic crop simulation model to predict future interactions between water and crop. An et al. [3] used the Pearson correlation coefficient method to analyze the intrinsic linkage and influence between soil–crop–environment and tomato water demand patterns. The inherent association and impact between the regularity and the regression function of water and crop physiological parameters were constructed by combining the through-path analysis and multiple regression methods. Zhang et al. [4] proposed a coupled water–crop growth (CHC) model to overcome the oversimplification of the crop and irrigation modules in the water model. Q. Li [5] introduced a new approach named the Sparse Fractional Levy Quaternion Extended Kalman Filter (SFLQEKF) for predicting stochastic time series. It has also been found that natural conditions, such as measuring crop physiological parameters, are more efficient than indirect conditions, such as measuring soil environment for irrigation scheduling methods, by comparing asparagus crop studies [6]. A mathematical model of maize crop and stage water relations under catchment recharge irrigation conditions was developed using the BP neural network, which reflects the sensitivity of water requirements at each developmental stage of maize [7]. These research methods have laid a solid foundation for crop–water interrelationships. Consequently, the ability to measure the parameters involved in the individual model accurately becomes a key factor.
The development of sensor technology has provided technical support for accurate measurements [8]. Vijayakumar et al. [9] used wireless sensor network (WSN) technology to collect data for accounting and analysis to enhance the intelligence of irrigation systems with the help of machine learning algorithms. Jitendra Kumar et al. developed and evaluated a soil moisture sensor [10]. Soulis et al. [11] determined the effect of soil moisture sensor positioning and the accuracy of soil moisture-based drip irrigation scheduling systems under different conditions. It emphasized the selection of suitable soil moisture sensors for specific crop needs. Luca Bondesan et al. [12] compared the difference between irrigation scheduling and variable rate irrigation with the inclusion of sensors and conventional uniform irrigation to demonstrate the importance of sensors in irrigation decision making. In the context of research on water-saving irrigation equipment, Djalilov et al. [13] studied the main factors of vibrations occurring in electric motors in irrigation facilities. They developed a virtual tool to detect and analyze vibrations. Yang Yang et al. [14] propose a crop rows detection algorithm based on the autonomous extraction of ROI (region of interest), which can achieve high accuracy and the robust extraction of ROI in various maize fields. The proposed algorithm can provide a new solution to the machine vision-based navigation technology for agricultural machinery. The system for driving irrigation equipment using solar photovoltaics has also been investigated and proposed [15]. An electronic pre-wetting detector was developed for irrigation scheduling, which can improve irrigation accuracy [16]. In the study of control methods, Mahmoodabadi [17] proposed a robust fuzzy adaptive integral sliding mode controller for nonlinear uncertain chaotic systems based on a multi-objective grey wolf optimization algorithm. In the paper, a multi-objective gray wolf optimization algorithm was used to improve the performance of the proposed controller. This method can effectively obtain the correct parameters of the proposed controller and avoid the trial-and-error process. J Torres et al. [18] proposed two anti-winding algorithms in the framework of sliding mode control to restart the necessary action without affecting the control action behavior. Alvaro Javier Prado et al. [19] introduced two anti-winding control algorithms in the framework of sliding mode control to reset the integral control action in the discontinuous mode promptly without inhibiting the robustness of the whole control system against disturbances. Zhang Yang et al. [20] proposed a unicycle robot and designed an adaptive fuzzy controller based on its dynamics model to achieve equilibrium control. These studies provide effective equipment for irrigation. The development of network technology is essential for how irrigation equipment can be adapted to intelligent irrigation systems.
The rapidly developing wireless network technology has been widely used in people’s lives and work in recent years, such as the design of office automation systems based on Internet of Things technology, the research of fire information based on computer network technology, and the research of Chinese medicine health rehabilitation [21,22,23], which helps to solve diversified problems encountered in different fields. Xu et al. [24] present a natural language query and control interface for LoT platforms that effectively parses natural language commands entered by users, enabling them to perform more complex operations. Tace et al. [25] proposed an intelligent irrigation system that integrates LoT technologies and machine learning algorithms in intelligent irrigation systems. A system based on deep learning algorithms was developed to monitor the number and height of moso bamboo shoots through image acquisition and YOLOv4 modeling [26]. An Arduino-based irrigation control system was proposed by conducting extensive experimental trials to automatically adjust soil water content within a specific depth range [27]. Rathod et al. [28] designed and developed an automatic irrigation system for greenhouses to optimize water use. Ling Zhu et al. [29] designed a ZigBee-based automated irrigation system to achieve real-time monitoring, remote monitoring, and alarm functions, providing an intuitive on-site management platform for irrigation users. Wireless sensor network systems have also supported irrigation research in recent years. Ndunagu et al. [30] proposed an innovative irrigation system using drip irrigation methods, which was designed and implemented using wireless sensor networks and Thingspeak.com to manage water resources effectively. Scholars also developed wireless sensor networks for drip irrigation systems and multi-intelligent body automatic irrigation systems [31,32].
In summary, with the development of technology, intelligent water-saving irrigation methods and systems will be the future trend, and research results in this area will be gradually applied. Although these controllers are effective, they have certain limitations. Their model designs are often universal and cannot effectively combine the weather conditions of the irrigated area with the local soil conditions, which can easily cause significant errors in the irrigation operation. For this problem, this paper uses predictive algorithms and crop coefficients combined with weather data from the summer maize-growing region of the Yellow Huaihai Sea to calculate crop water consumption. We also use wireless sensor technology to monitor local soil environment data in real-time and introduce fuzzy algorithms and sliding mode control methods to design composite controllers to calculate irrigation volumes and achieve irrigation control.
The significant contributions of the proposed method are as follows:
(1) A method of intelligent farm irrigation control incorporating multiple models is proposed, integrating sensor technology, wireless network communication technology, the ARIMA prediction model, a fuzzy algorithm, and sliding mode control.
(2) An intelligent irrigation control system based on Java language is developed, which realizes the whole smart irrigation.
This paper proposes an intelligent farm irrigation control method based on the crop water consumption model, rainfall prediction, a fuzzy algorithm, and sliding mode control. It also develops a farmland irrigation control system based on this method. The rest of the study is structured as follows: Section 2 presents the intelligent irrigation control method for farmland and the prediction and control models used. Section 3 describes the design of the prediction and control models in detail based on our dataset. In Section 4, we compare the prediction results and discuss the simulation results of the control model. The paper concludes with a summary of our results and directions for further research in Section 5.
2. Materials and Methods
2.1. Structure of Farmland Irrigation Control System
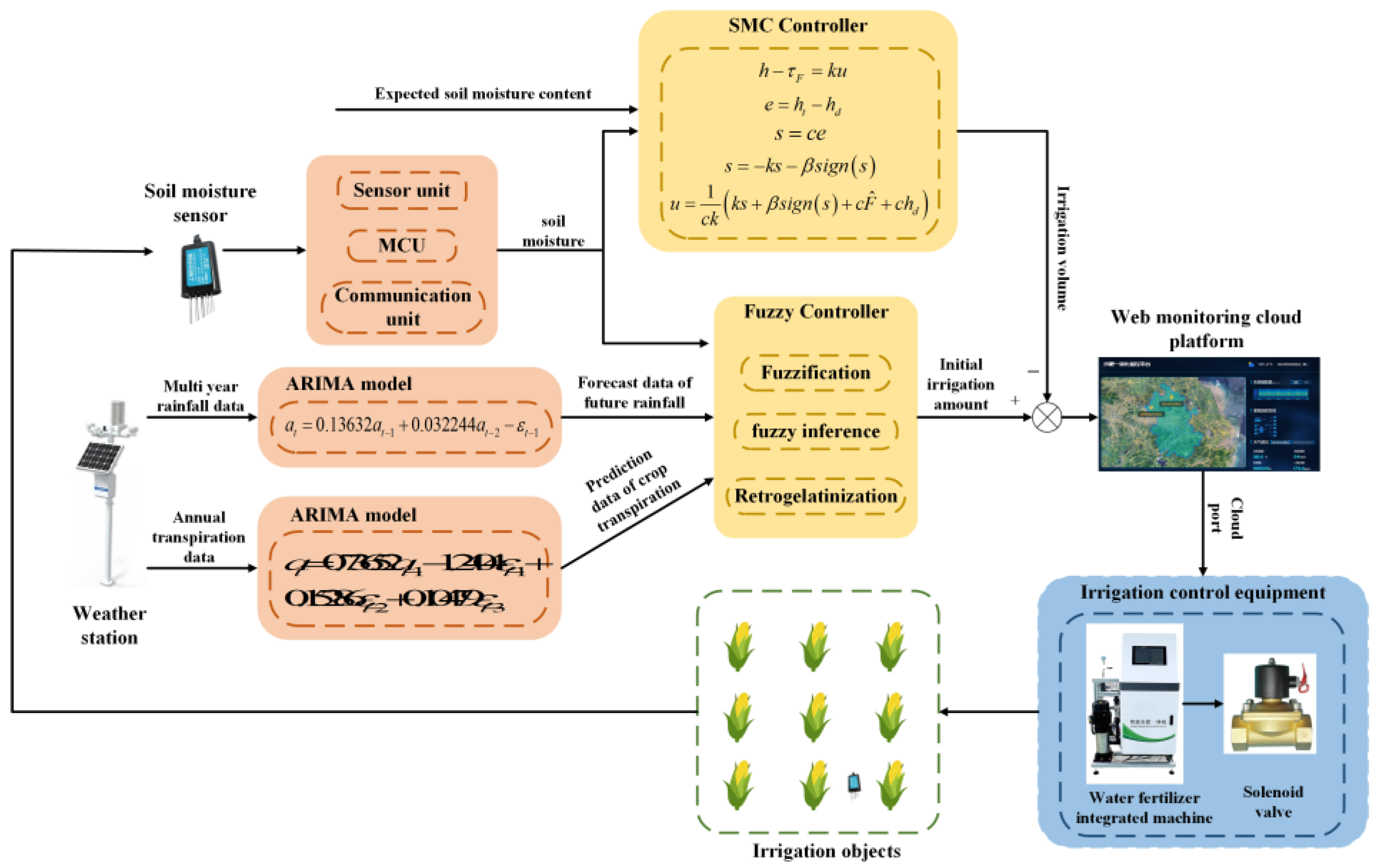
This paper proposes an agricultural water-saving irrigation control system, shown in a simple schematic diagram in Figure 1. In this system, soil monitoring data, multi-year meteorological data, crop water consumption model, and expected soil moisture content are used as input data, and the calculation of farmland irrigation volume is carried out based on the fuzzy sliding mode control method. Then the irrigation valve is controlled by a computer using a 5G network for automatic irrigation. The soil moisture sensors deployed in the system farmland use wireless network communication to obtain real-time soil temperature and humidity data. In addition, a time series model is used to predict future rainfall and crop transpiration through multi-year climatological data from weather stations. The precise control cloud platform developed receives irrigation volume data and then uses the cloud port to control the water and fertilizer machine for regular and quantitative irrigation. The water and fertilizer machine controls the solenoid valve for irrigation through the field pipe network system.
2.2. Intelligent Irrigation Control Method
A diagram of the proposed intelligent irrigation method is shown in Figure 2, in which wireless sensor technology and wireless network communication technology are used. Firstly, the weather station’s multi-year climate database predicts the rainfall and crop transpiration for the coming week. The soil moisture is input into the fuzzy algorithm to derive the initial irrigation amount. The soil moisture and the desired soil moisture content are used to calculate the compensation amount through the sliding mode controller, combined with the initial irrigation amount to derive the final crop irrigation amount. The system receives the irrigation volume for the coming week as a control volume. It remotely controls equipment via the cloud port for irrigation operations when the crop needs water.
After finishing the irrigation operation, the soil moisture and other information in the farmland are fed back to the sensors and weather stations in real-time to achieve closed-loop irrigation control. The composite controller can calculate whether the soil environment meets the suitable conditions for crop growth and development after the actual irrigation operation through the feedback data. The irrigation operation can be stopped when the soil conditions reach the appropriate growth range.
2.3. Rainfall Prediction Model
The autoregressive integrated moving average (ARIMA) model predicts future daily rainfall. The ARIMA model requires the time series to be smooth, and if a non-smooth time series is obtained, the first step is to make a difference of order d until the data is soft and the number of disagreements made is the parameter d. The expression is:
where is the predicted value and is the number of differences.
The lagged values were then fitted with p (autoregressive term) and q (moving average term) as parameters, and the present and lagged values of the model random errors were regressed to build the model [33]. The prediction equation of the ARIMA model with p, d, and q as parameters can be expressed as:
where is the sample value, , and are the model parameters; is a zero-mean white noise sequence.
This model can use the information criterion method to determine the parameters of p and q. First, the AIC criterion (Akaike Information Criterion) is used to weigh the complexity of the estimated model and the accuracy of the data fitted by the model.
where L denotes the maximum likelihood function of the model and K denotes the number of model parameters. When the sample size is large, combining the assessment with the BIC criterion (Bayesian Information Criterion) is necessary.
where n denotes the sample size and BIC considers the sample size and can effectively prevent overfitting due to a large sample size. Moreover, BIC can control the situation where k is too high and when n is small.
It can determine the p and q values corresponding to the smallest sum of AIC and BIC values as the parameters p and q of the model.
2.4. Crop Transpiration Prediction Model
The ARIMA model described above was also used for crop evapotranspiration prediction. In the case of obtaining the reference evapotranspiration, the crop coefficient is used to correct transpiration [34,35].
where is the predicted evapotranspiration, is the crop evapotranspiration, and not only varies according to the crop species but also takes different values in different crop growth cycles.
This paper selected maize as the research object. The crop coefficients for the early stage, for the middle stage, and for the late stage were obtained according to the crop coefficient table recommended by the Food and Agriculture Organization of the United Nations.
2.5. Controller Design
The controller design incorporates a fuzzy algorithm and a sliding-mode controller based on a fault observer, as shown in Figure 3. The fuzzy algorithm can summarize expert experience and data into linguistic control rules, eliminating the need for an accurate mathematical model of the controlled object, making it suitable for controlling nonlinear systems and less complex to implement [36]. The sliding mode controller can overcome the uncertainty of the system; it also has good control performance for nonlinear systems, fast response, strong resistance to external disturbances, and good robustness so that it can adapt to the complex environment of farmland [37].
2.5.1. Fuzzy Algorithm Design
The fuzzy model for a continuous-time nonlinear system can be expressed as [38]:
where is the ith fuzzy inference rule, i is the number of inference rules, and is the fuzzy set. is the state space matrix of the corresponding dimension of the ith local model and the vector of premise variables is defined as . The fuzzy model can be expressed in the following compact form using the center of gravity defuzzification method.
where the normalized MF is defined as:
where is the affiliation level of the premise variable in each fuzzy set . It is important to note that the normalized MFs satisfy the following properties.
2.5.2. Sliding Mode Controller Design
In 0–15 cm soils, soil moisture and irrigation volume are approximately linear [39], so the irrigation system model is constructed as follows:
where is the soil moisture, is the irrigation volume of the irrigation system, , and is the fault or uncertainty disturbance caused by various adverse factors.
The systematic error is defined as:
where is the actual soil moisture and is the desired soil moisture.
The slip surface is defined as:
The convergence rate is defined as:
where and .
From all the above equations, the controller is obtained as follows:
where is the estimate of , defining the Lyapunov function , the derivative of which yields , subject to , when , the system can be acquired as globally asymptotically stable.
2.5.3. Fault Observer Design
We are constructing a nonlinear fault observer.
where is the observer’s internal state variable, is a nonlinear function, and is the nonlinear observer gain. The disturbance estimation error is defined , considering the slow change of the composite disturbance in the process control, and the assumptions of the disturbance observer are set to . The expression can be described as:
The Lyapunov function is defined as , the derivation of which yields , so that the fault observer is asymptotically stable.
3. Design Example
In this paper, soil moisture sensors were deployed to obtain soil moisture data in real-time in farmland in Suzhou City, Anhui Province, and then to make predictions of future daily rainfall and crop transpiration values based on historical data of daily rain in Suzhou City from 1951 to 2019 and daily transpiration from 2010 to 2019 [40]. Although the datasets of different periods in Cebu City are used, the ARIMA model can be used to predict the rainfall and crop transpiration during the same period and then to combine the obtained soil moisture data to calculate the initial irrigation amount. At the same time, we set up water-saving irrigation equipment in the city and developed a monitoring cloud platform to achieve remote irrigation control, as shown in Figure 4 and Figure 5.
3.1. Soil Moisture Data Acquisition
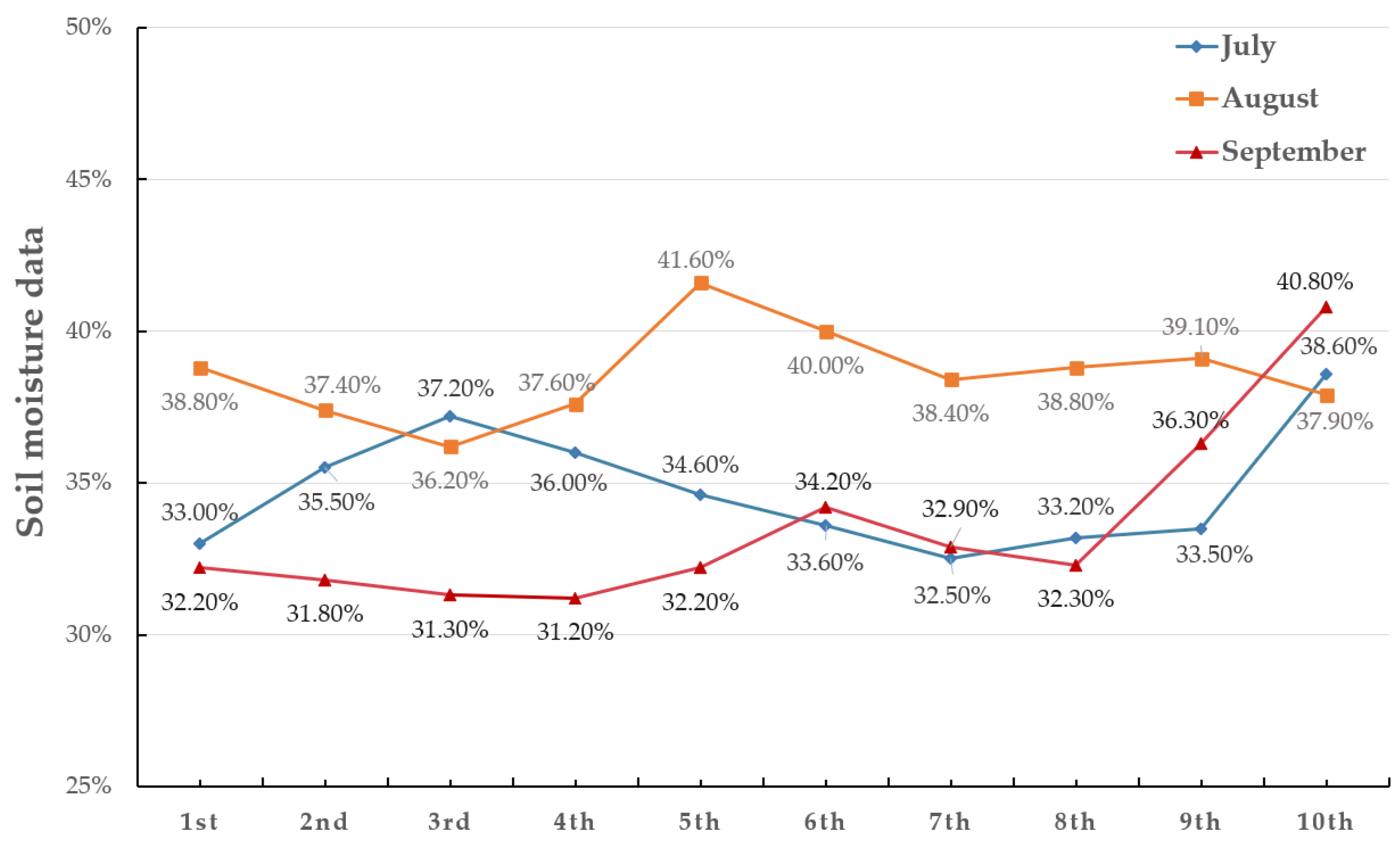
Some of the historical data on soil moisture collected by the soil moisture sensor are shown in Figure 6. A wireless gateway also needs to be set up to enable data transfer, which is saved in a database and can be viewed and queried in real-time in the developed cloud platform for historical data.
3.2. Future Rainfall Model Design
The ARIMA model order was first determined using the information criterion method. When selecting the ARIMA (p,d,q) model for forecasting, the parameters were chosen from low to high order according to 0, 1, 2, and 3, using the values of AIC and BIC to select the optimal value model. The results are shown in Table 1.
Based on the comparison results, it was found that the model ARIMA(2,0,1) had the smallest sum of AIC and BIC, so this model was selected for forecasting. The model variables were taken to be p = 2 and q = 1.
The fitting formula is
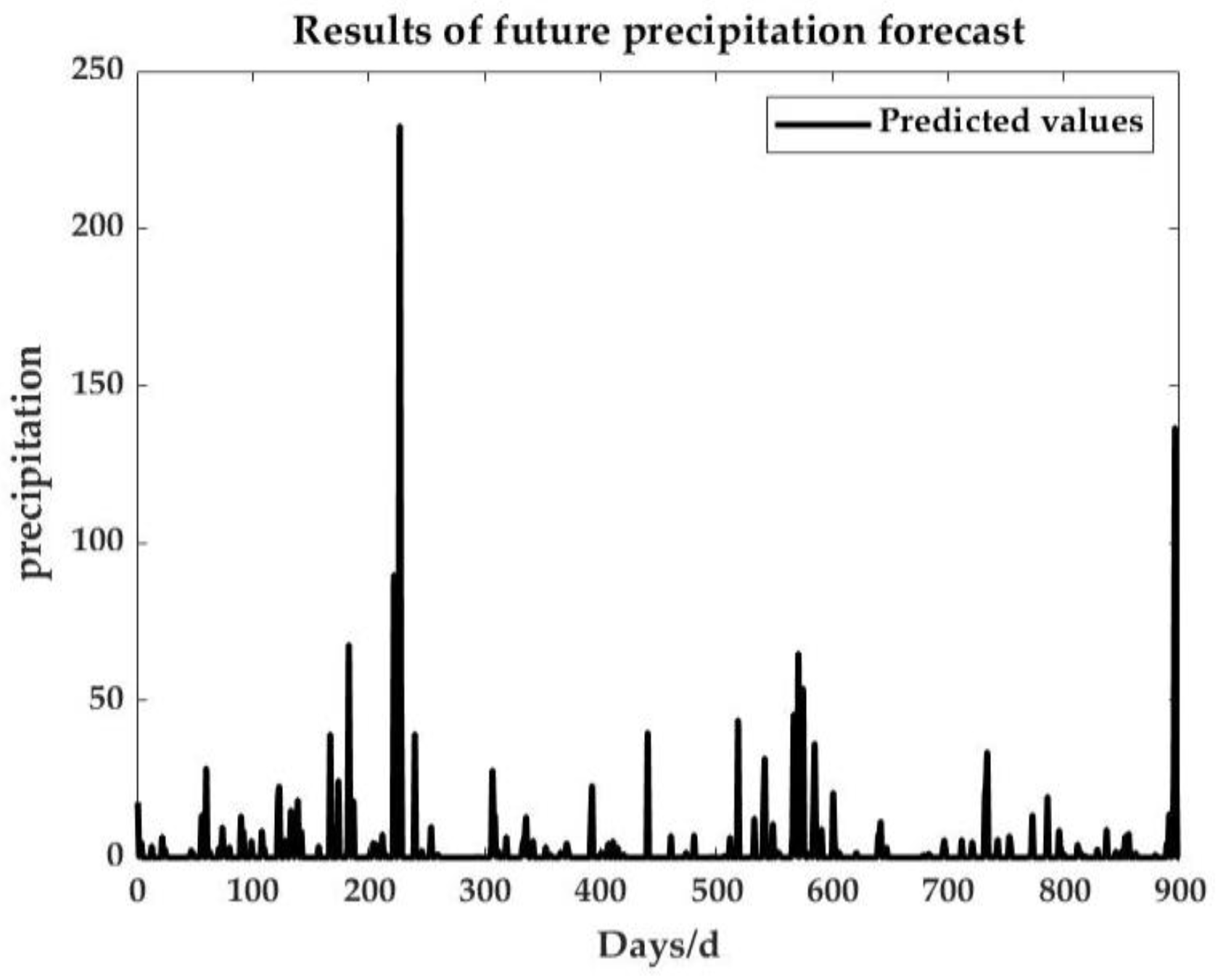
The Durbin–Watson (DW) test, which is used to test the first-order autocorrelation of the residuals in the regression analysis, is better the closer the value of this statistic is to two. The result of the Durbin–Watson test for this model was 1.9998, suggesting that the reasonable accuracy was high and the modeling met the requirements. Lastly, the research data were analyzed and predicted according to the established ARIMA(2,0,1) model. The combined test data and indicated data are shown in Figure 7, showing that the ARIMA model’s fitted results are similar to the actual rainfall variation trend. Future rainfall forecasts are presented in Figure 8.
3.3. Evapotranspiration Model Design
The ARIMA model order was first established in conjunction with the information criterion, and the parameters were selected from low to high demand according to 0, 1, 2, and 3, using the values of AIC and BIC to determine the optimal value model. The results are described in Table 2.
The model ARIMA(1,0,3) was considered the most effective, given that the sum of AIC and BIC was minimal. Thus, the values of the parameters in the model are p = 1 and q = 3. After determining the order, the tentative model parameters are estimated, generally using the maximum likelihood estimation method, and the final fitted formula based on the model estimation results is
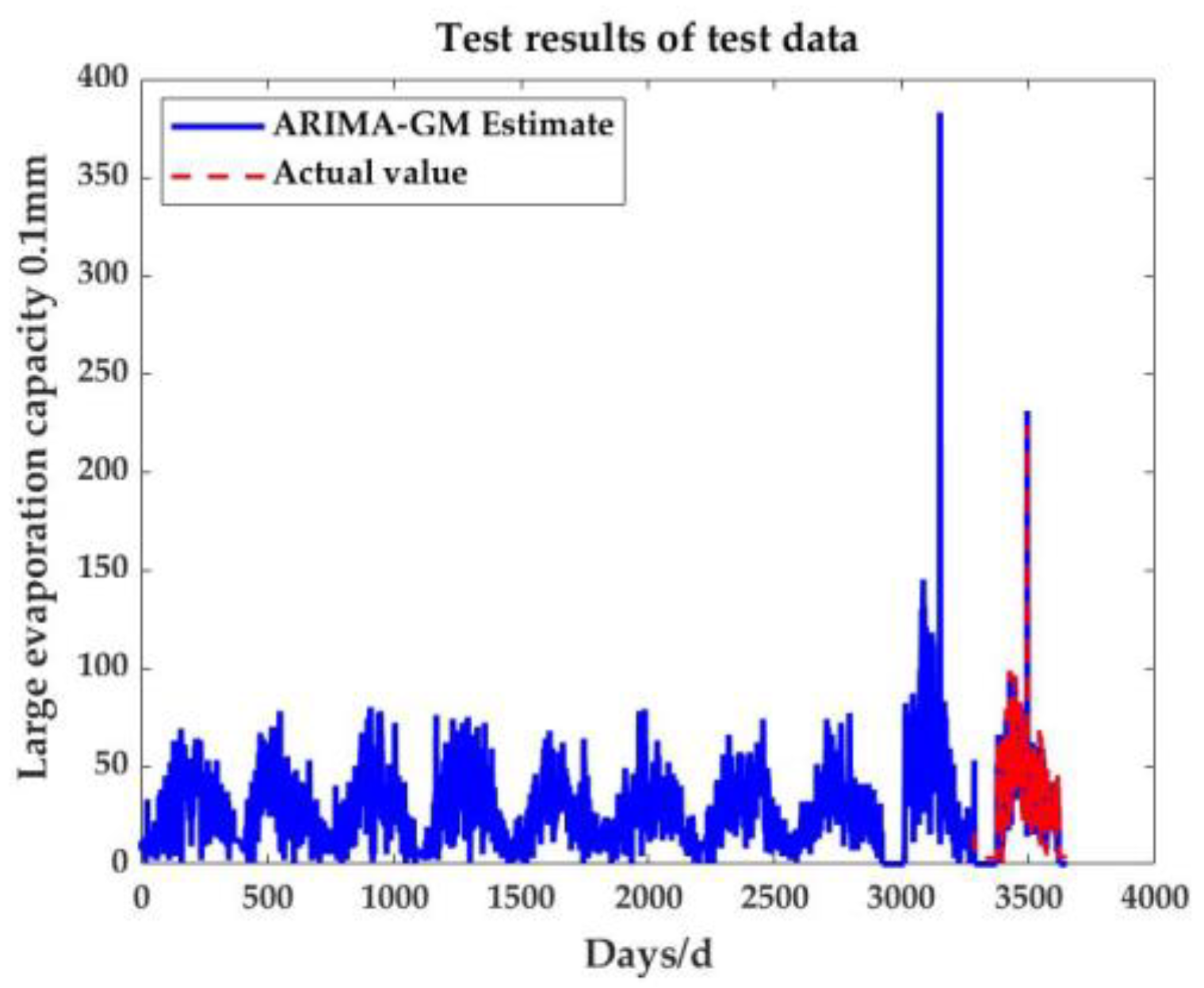
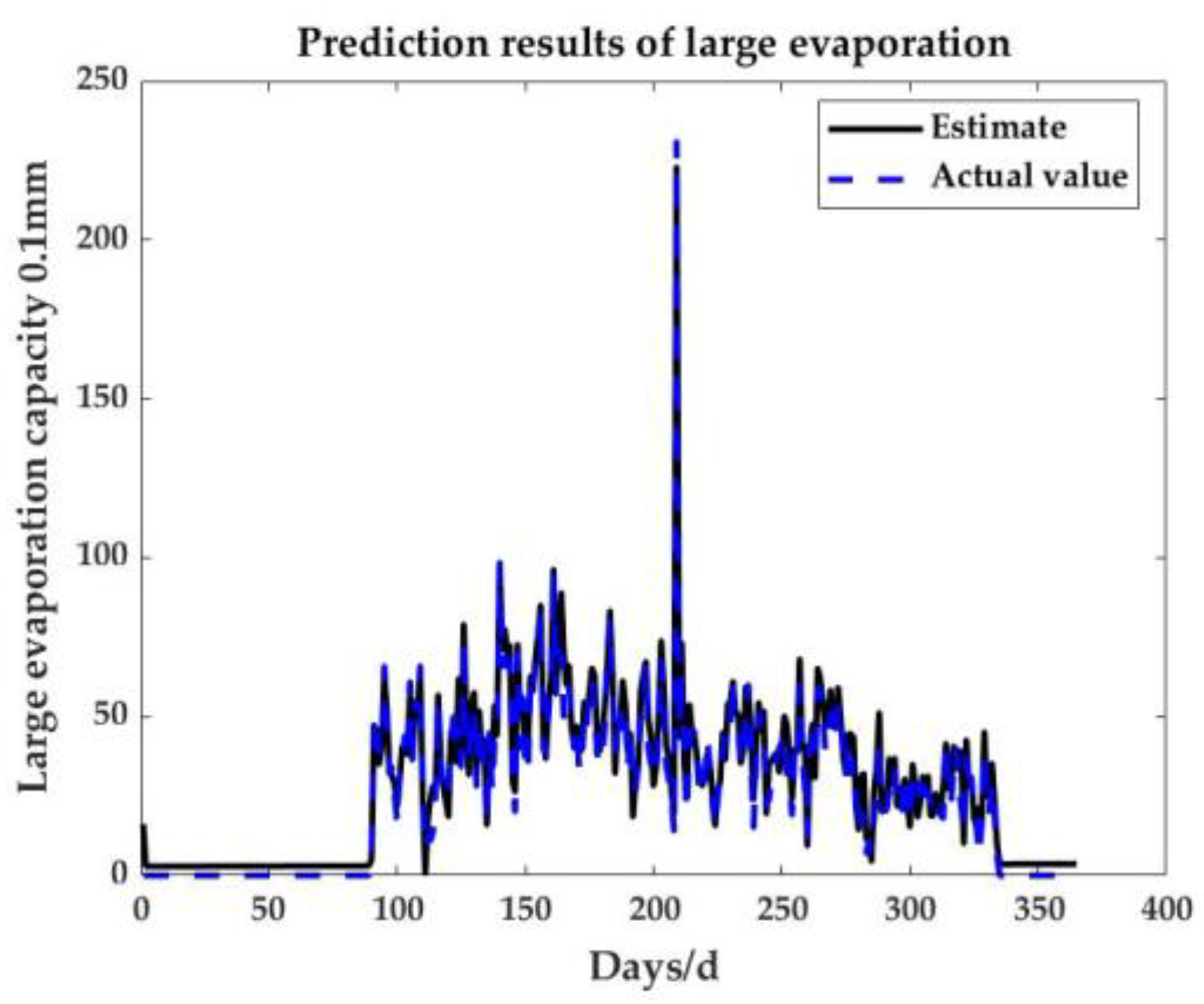
The Durbin–Watson operation resulted in 1.9921, with a high fitting accuracy, and the modeling satisfied the requirements. Eventually, transpiration was predicted by the established ARIMA(1,0,3) model. Comparing the expected data for 2019 with the accurate data from 2010 to 2019 indicates that the model prediction results and the actual evapotranspiration data have a similar tendency. The comparison plots and prediction results are illustrated in Figure 9 and Figure 10.
3.4. Composite Controller Design
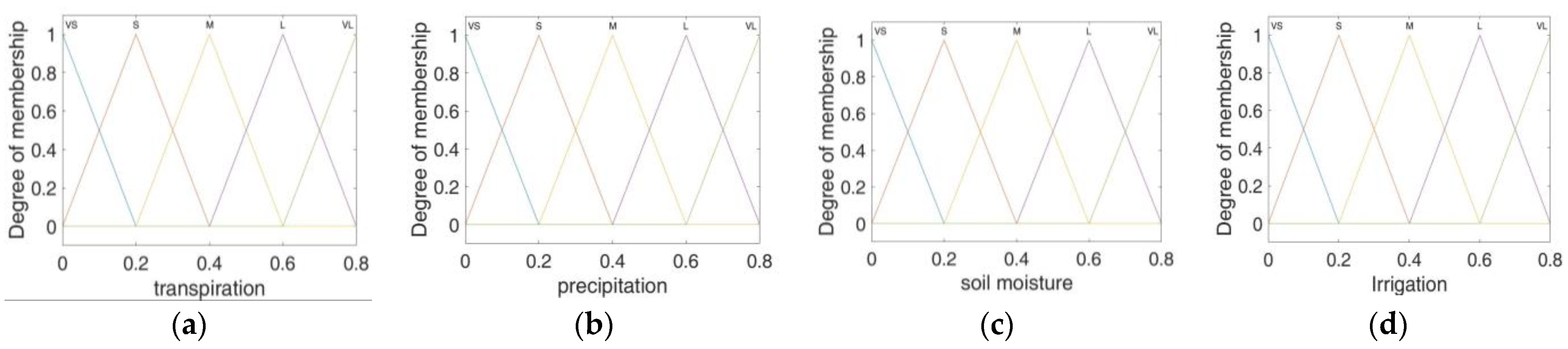
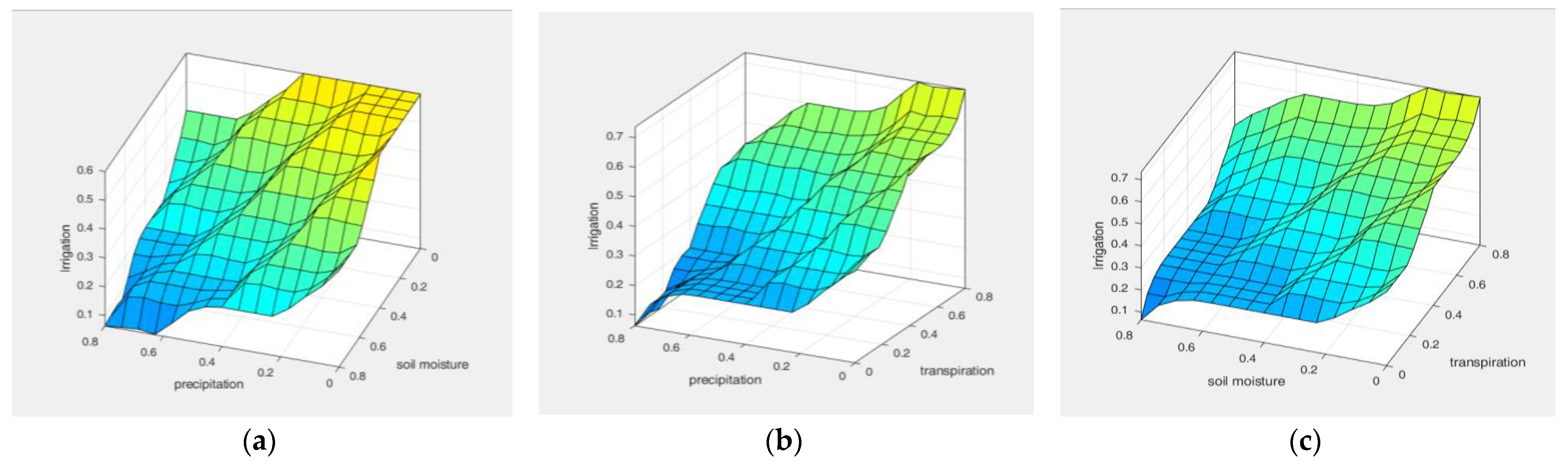
This article uses the predicted amount of rainfall in Suzhou City, the expected amount of crop transpiration, the soil moisture data collected by sensors, and the expected soil moisture content as input parameters of the composite controller, with the irrigation amount as the output parameter. Three inputs and a single output were employed in the fuzzy algorithm. Based on theoretical analysis and the experience of actual operators, the variables were fuzzified into five ranks: extra small, slightly small, medium, large, and extra large, as displayed in Table 3. The triangular affiliation function is used for both input and output quantities and expressed in Figure 11. The fuzzy control rules are constructed, and the fuzzy rule variable relationships are shown in Figure 12, which offers a nonlinear relationship between the variables. Since all three input quantities have five linguistic input values, there are 5 × 5 × 5 = 125 fuzzy rules. The details are shown in Table 4.
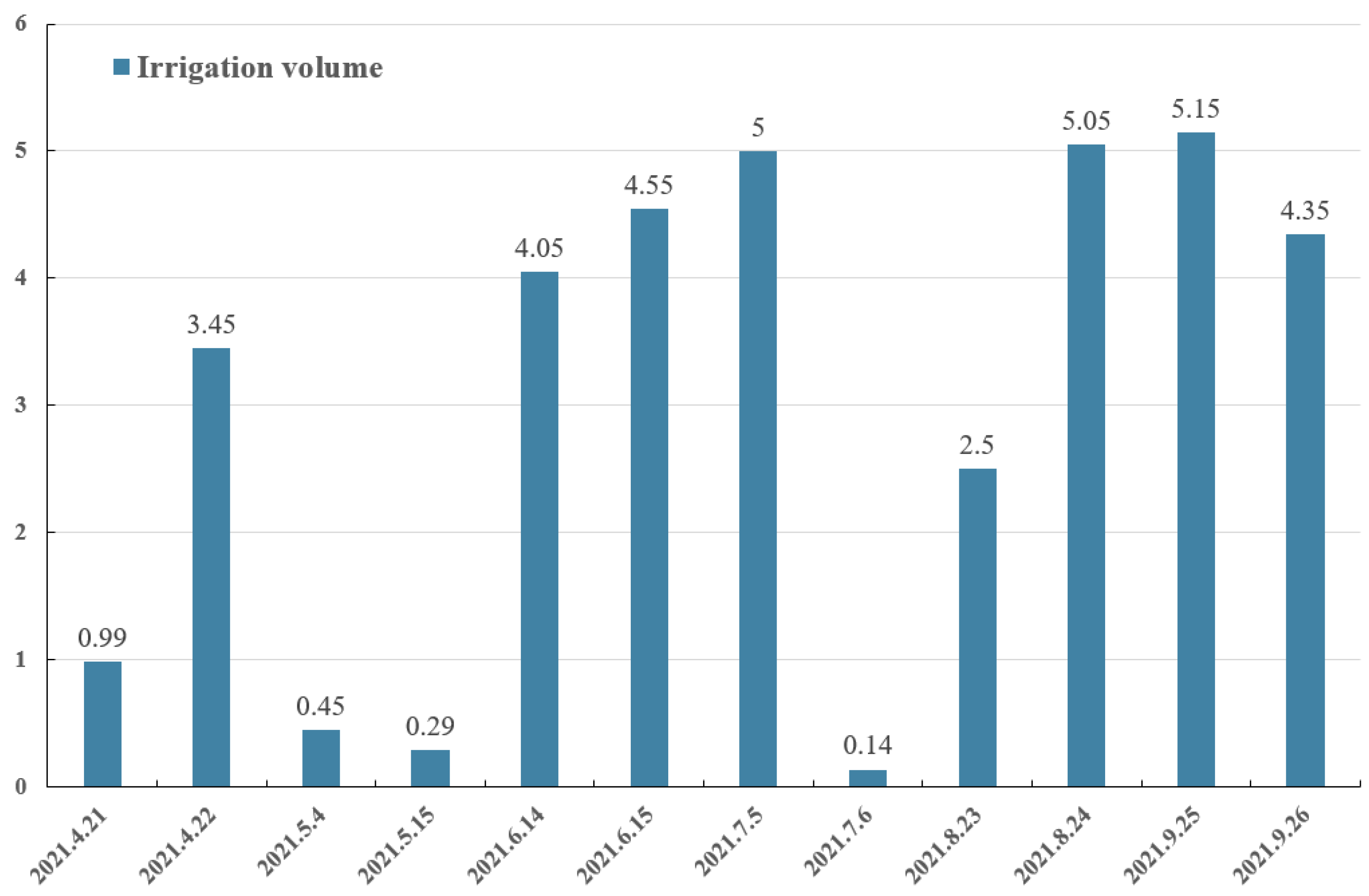
Some of the irrigation volume calculations are shown in Figure 13.
4. Analysis and Discussion of the Results
4.1. Analysis of the Predicted Results of the Decision Model Inputs
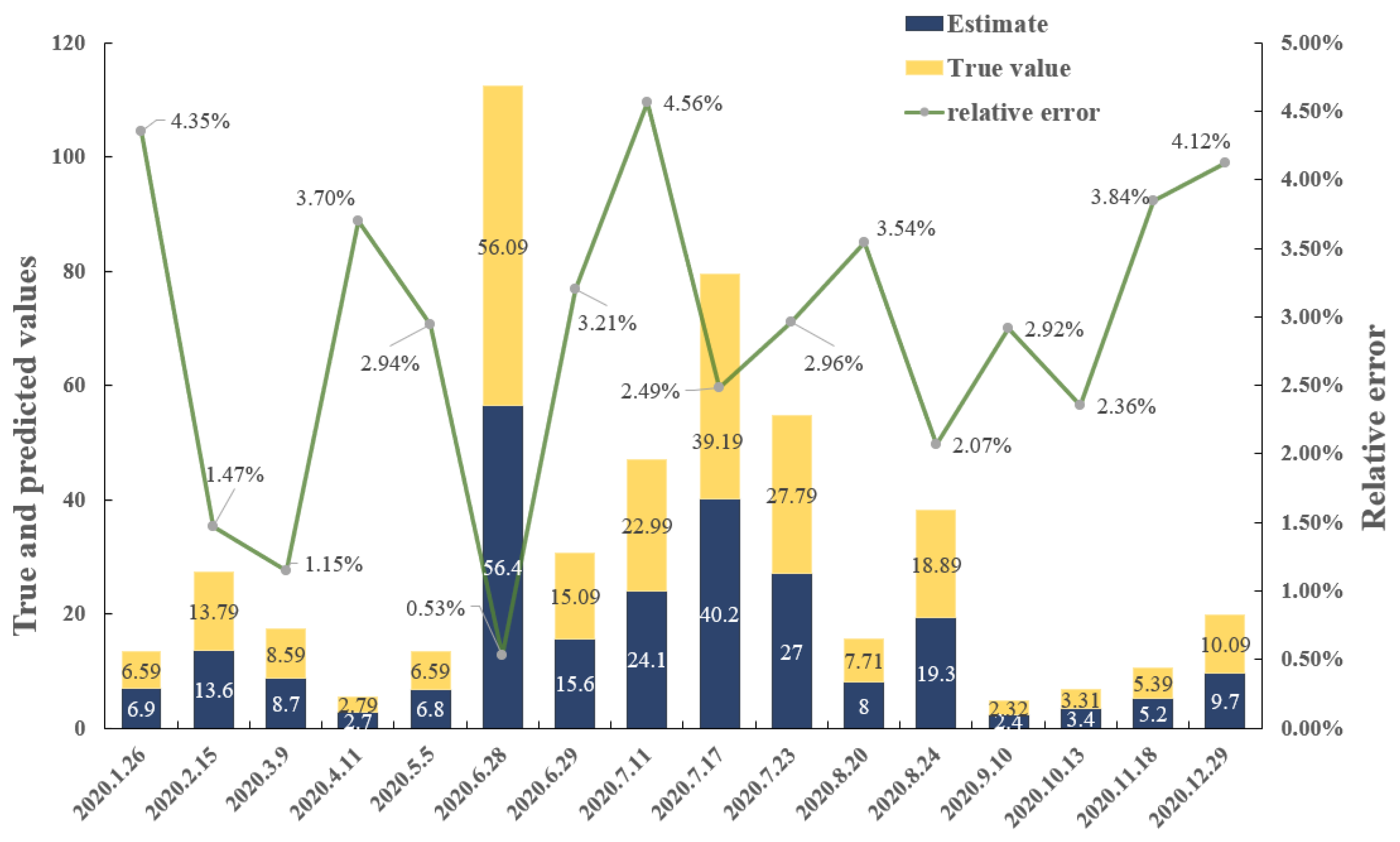
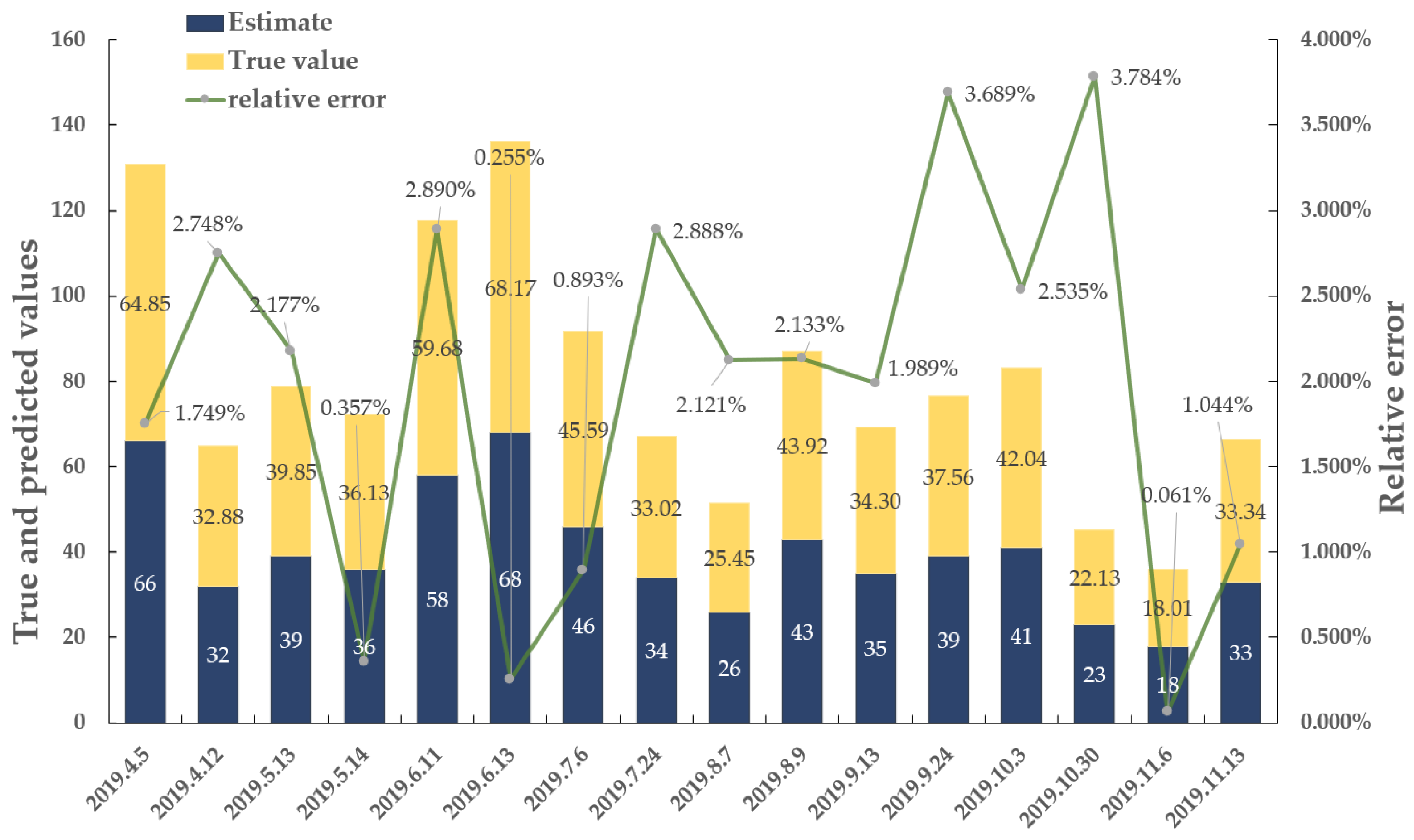
The predicted values of some precipitation and evapotranspiration in Suzhou City, Anhui Province were selected for comparison and analysis with the actual values, as shown in Figure 14 and Figure 15. It can be noted that the relative error is relatively small and the model has high prediction accuracy. The ARIMA model can be employed to anticipate future rainfall and crop evapotranspiration. It also provides a reference basis for irrigation volume decision making.
4.2. Comparative Analysis of Control Results
Simulation experiments are carried out to verify the effectiveness and good performance of the proposed sliding mode controller (SMC). We set up the simulation environment in MATLAB/Simulink R2021a.
To better evaluate the proposed controller performance, the traditional SMC controller and proportion integration differentiation (PID) controller are also given for comparison purposes [41]. The nominal parameters of the control parameters of the three controllers are listed in Table 5.
The simulation of the PID controller and the SMC controller in the case of faults is presented in Figure 16. The incorporation of flaws in the system will enhance the control difficulty of the system to a greater extent. The proposed composite controller has superior tracking accuracy compared to the PID controller in the case of faults because the fault observer is added to the proposed composite controller to estimate flaws accurately and efficiently. According to the comparison results, the composite controller designed in this paper has a higher control accuracy and better robustness than the PID controller. Furthermore, it can achieve faster error convergence and better tracking of the reference signal in fault operation mode.
Moreover, we clearly see from the graph that the tracking curves under the SMC control are pretty smooth, while the ones under the PID control have a more apparent chattering phenomenon. The reason is that the SMC control exhibits smoother control inputs than the PID controller, resulting in a smoother tracking response for the proposed control.
5. Conclusions
This study has designed an intelligent irrigation control system for crop irrigation in agricultural fields. At first, a brilliant irrigation control method incorporating multiple models is proposed in this system. Through the comprehensive employment of sensor technology, wireless network communication technology, the ARIMA prediction model, and a composite controller, real-time soil moisture data can be acquired and combined with crop coefficients to achieve crop transpiration and future rainfall prediction. Then, the controller is designed using the expected soil moisture content. Furthermore, in response to better monitoring of the collected data and irrigation operations, an intelligent irrigation control cloud platform based on Java language was developed to achieve intelligent and automated irrigation control throughout the process. Eventually, MATLAB/Simulink verified the proposed fuzzy sliding mode control’s effectiveness in setting faults. The simulation results demonstrate that the SMC has efficient tracking performance and ensures the stability and security of the irrigation system effectively.
The method proposed in this study still has some limitations. Because there are many influencing factors, such as climate and soil, to facilitate the research, we only adopted soil moisture, rainfall, and evapotranspiration for modeling in this paper. Consequently, there are still some things that could improve irrigation estimation. The following work will sufficiently consider more relevant parameters and combine them with machine learning theory to further enhance the accuracy of the decision model.
Author Contributions
All authors contributed to this work. Conceptualization, X.L. and L.C.; methodology, X.L. and Z.L.; software, X.L.; validation, X.L. and Z.L.; writing—original draft, X.L.; data curation, X.L.; writing—review and editing, X.L., Z.L., D.X., G.Z., M.W. and L.C. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by Collaborative Innovation Project of Colleges and Universities of Anhui Province, grant number No. GXXT-2020-011.
Data Availability Statement
The data that support the findings of this study are available on request from the corresponding author. The data are not publicly available due to privacy and ethical restrictions.
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Bergez, J.E.; Debaeke, P.; Deumier, J.M.; Lacroix, B.; Leenhardt, D.; Leroy, P.; Wallach, D. MODERATO: An Object-Oriented Decision Tool for Designing Maize Irrigation Schedules. Ecol. Model. 2001, 137, 43–60. [Google Scholar] [CrossRef]
- Tolomio, M.; Casa, R. Dynamic Crop Models and Remote Sensing Irrigation Decision Support Systems: A Review of Water Stress Concepts for Improved Estimation of Water Requirements. Remote Sens. 2020, 12, 3945. [Google Scholar] [CrossRef]
- An, S.; Yang, F.; Yang, Y.; Huang, Y.; Zhangzhong, L.; Wei, X.; Yu, J. Water Demand Pattern and Irrigation Decision-Making Support Model for Drip-Irrigated Tomato Crop in a Solar Greenhouse. Agronomy 2022, 12, 1668. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, Z.; Singh, V.P.; Su, Q.; He, H.; Yin, H.; Zhang, Y.; Wang, F. Simulation of Crop Water Demand and Consumption Considering Irrigation Effects Based on Coupled Hydrology-Crop Growth Model. J. Adv. Model. Earth Syst. 2021, 13, e2020MS002360. [Google Scholar] [CrossRef]
- Li, Q. New Approach for Multidimensional Prognostic of Stochastic Time Series Based on Sparse-Based Fractional Levy Quaternion Extended Kalman Filter. Struct. Health Monit.-Int. J. 2022. [Google Scholar] [CrossRef]
- Zinkernagel, J.; Kahlen, K. Water Relations of Asparagus Crop under Different Water Supply and Implications for Plant-Based Irrigation Scheduling. Acta Hortic. 2017, 1150, 385–390. [Google Scholar] [CrossRef]
- Li, X.; Gou, M.; Cheng, M.; Wang, Y. Maize Crop-Water Model under Condition of Supplemental Irrigation with Harvested Rainwater. Trans. Chin. Soc. Agric. Eng. 2010, 26, 80–84. [Google Scholar]
- Xie, D.; Chen, L.; Liu, L.; Chen, L.; Wang, H. Actuators and Sensors for Application in Agricultural Robots: A Review. Machines 2022, 10, 913. [Google Scholar] [CrossRef]
- Vijayakumar, V.; Balakrishnan, N. Artificial Intelligence-Based Agriculture Automated Monitoring Systems Using WSN. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 8009–8016. [Google Scholar] [CrossRef]
- Kumar, J.; Patel, N.; Rajput, T.B.S. Development and Integration of Soil Moisture Sensor with Drip System for Precise Irrigation Scheduling through Mobile Phone. JANS 2016, 8, 1959–1965. [Google Scholar] [CrossRef]
- Soulis, K.X.; Elmaloglou, S.; Dercas, N. Investigating the Effects of Soil Moisture Sensors Positioning and Accuracy on Soil Moisture Based Drip Irrigation Scheduling Systems. Agric. Water Manag. 2015, 148, 258–268. [Google Scholar] [CrossRef]
- Bondesan, L.; Ortiz, B.V.; Morlin, F.; Morata, G.; Duzy, L.; Santen, E.V.; Lena, B.P.; Vellidis, G. A Comparison of Precision and Conventional Irrigation in Corn Production in Southeast Alabama. Precis. Agric. 2023, 213, 118826. [Google Scholar] [CrossRef]
- Djalilov, A.; Matchonov, O.; Abubakirov, A.; Abdunabiev, J.; Saidov, A. System for Measuring and Analysis of Vibration in Electric Motors of Irrigation Facilities. IOP Conf. Ser. Earth Environ. Sci. 2021, 868. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, Y.; Yue, X.; Zhang, G.; Wen, X.; Ma, B.; Xu, L.; Chen, L. Real-Time Detection of Crop Rows in Maize Fields Based on Autonomous Extraction of ROI. Expert Syst. Appl. 2023, 213, 118826. [Google Scholar] [CrossRef]
- Barrueto Guzmán, A.; Barraza Vicencio, R.; Ardila-Rey, J.; Núñez Ahumada, E.; González Araya, A.; Arancibia Moreno, G. A Cost-Effective Methodology for Sizing Solar PV Systems for Existing Irrigation Facilities in Chile. Energies 2018, 11, 1853. [Google Scholar] [CrossRef]
- Hasnain, S.; Singh, A. Development of Electronic Wetting Front Detector for Irrigation Scheduling. Agric. Water Manag. 2022, 274, 107980. [Google Scholar] [CrossRef]
- Mahmoodabadi, M.J. An Optimal Robust Fuzzy Adaptive Integral Sliding Mode Controller Based upon a Multi-Objective Grey Wolf Optimization Algorithm for a Nonlinear Uncertain Chaotic System. Chaos Solitons Fractals 2023, 167, 113092. [Google Scholar] [CrossRef]
- Torres, J.; Garcia, G.; Aboukheir, H.; Herrera, M.; Camacho, O. Anti-Windup Algorithms for Sliding Mode Control in Processes with Variable Dead-Time. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020. [Google Scholar]
- Prado, A.J.; Herrera, M.; Dominguez, X.; Torres, J.; Camacho, O. Integral Windup Resetting Enhancement for Sliding Mode Control of Chemical Processes with Longtime Delay. Electronics 2022, 11, 4220. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, H.; Wang, B.; Zhao, J. Balancing Control of a Unicycle Robot with Double Gyroscopes Using Adaptive Fuzzy Controller. Mechatronics 2022, 88, 102908. [Google Scholar] [CrossRef]
- Xiao, Y.; Chen, Y.; Tang, Y.; Jung, H. Design and Implementation of Office Automation System Based on Internet of Things Technology. Wirel. Commun. Mob. Comput. 2022, 2022, 519654. [Google Scholar] [CrossRef]
- Cai, L.R.; Ning, T.H.; Chao, L.R. Research on Fire Information Based on Computer Network Technology. J. Phys. Conf. Ser. 2021, 1792, 012024. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, S. Research on Health Rehabilitation of Traditional Chinese Medicine Based on Computer Network Technology. J. Phys. Conf. Ser. 2021, 1744, 042097. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, H.; Chen, X.; Wang, Y.; Yue, Z. Building a Natural Language Query and Control Interface for IoT Platforms. IEEE Access 2022, 10, 68655–68668. [Google Scholar] [CrossRef]
- Tace, Y.; Tabaa, M.; Elfilali, S.; Leghris, C.; Bensag, H.; Renault, E. Smart Irrigation System Based on IoT and Machine Learning. Energy Rep. 2022, 8, 1025–1036. [Google Scholar] [CrossRef]
- Hong, S.; Jiang, Z.; Zhu, J.; Rao, Y.; Zhang, W.; Gao, J. A Deep Learning-Based System for Monitoring the Number and Height Growth Rates of Moso Bamboo Shoots. Appl. Sci. 2022, 12, 7389. [Google Scholar] [CrossRef]
- Zhu, H.-H.; Huang, Y.-X.; Huang, H.; Garg, A.; Mei, G.-X.; Song, H.-H. Development and Evaluation of Arduino-Based Automatic Irrigation System for Regulation of Soil Moisture. Int. J. Geosynth. Ground Eng. 2022, 8, 13. [Google Scholar] [CrossRef]
- Rathod, A.T.; Awate, A.U. Design and Development of Automated Irrigation System. IJTSRD 2018, 3, 1052–1056. [Google Scholar] [CrossRef]
- Zhu, L.; Zhang, Z.Y. Water-Saving Intelligence Irrigation Systems Design Based on ZigBee Technology. AMM 2014, 687–691, 3187–3190. [Google Scholar] [CrossRef]
- Ndunagu, J.N.; Ukhurebor, K.E.; Akaaza, M.; Onyancha, R.B. Development of a Wireless Sensor Network and IoT-Based Smart Irrigation System. Appl. Environ. Soil Sci. 2022, 2022, 7678570. [Google Scholar] [CrossRef]
- Sakthivel, S.; Vivekanandhan, V.; Manikandan, M. Automated Irrigation System Using Improved Fuzzy Neural Network in Wireless Sensor Networks. Intell. Autom. Soft Comput. 2023, 35, 853–866. [Google Scholar] [CrossRef]
- MERİÇ, M.K. Nihat TUNAL Design and Implementation of Wireless Sensor Network for Monitoring and Controlling of Filter Backflush in Drip Irrigation System. Ege Üniversitesi Ziraat Fakültesi Derg. 2019, 56, 15–25. [Google Scholar]
- Abdul Wahid, A.; Arunbabu, E. Forecasting Water Quality Using Seasonal ARIMA Model by Integrating in-Situ Measurements and Remote Sensing Techniques in Krishnagiri Reservoir, India. Water Pract. Technol. 2022, 17, 1230–1252. [Google Scholar] [CrossRef]
- Estimation of Crop Evapotranspiration of Okra Using Drainage Lysimeters under Dry Season Conditions. Sci. Afr. 2022, 16, e01189.
- Hybrid Deep Learning Techniques for Estimation of Daily Crop Evapotranspiration Using Limited Climate Data. Comput. Electron. Agric. 2022, 202, 107338. [CrossRef]
- Ferraz, R.S.C.; Mello, T.P.; Borges Filho, M.N.; Borges, R.F.O.; Magalhães Filho, S.C.; Scheid, C.M.; Meleiro, L.A.C.; Calçada, L.A. An Experimental and Theoretical Approach on Real-Time Control and Monitoring of the Apparent Viscosity by Fuzzy-Based Control. J. Pet. Sci. Eng. 2022, 217, 110896. [Google Scholar] [CrossRef]
- Yang, Y.; Niu, Y. Co-Design of Scheduling Protocol and Fuzzy Sliding Mode Controller under Communication Constraints. Automatica 2023, 147, 110698. [Google Scholar] [CrossRef]
- Anh-Tu Nguyen; Tadanari Taniguchi; Luka Eciolaza; Víctor Campos Fuzzy Control Systems: Past, Present and Future. IEEE Comput. Intell. Mag. 2019, 14, 56–68. [CrossRef]
- Bo, G.; Yan, D.; Meng, C.; Jiaxin, L.; Chao, L.; Jiayao, Z. Soil Water Content and Lateral Rheology of Cunninghamia lanceolata Forest Under Different Rainfall Levels. Res. Water Soil Conserv. 2019, 161–166. [Google Scholar]
- National Meteorological Information Centre—China Meteorological Data Network Available online:. Available online: https://data.cma.cn/ (accessed on 1 January 2023).
- Li, Z.; Wang, W.; Zhang, C.; Zheng, Q.; Liu, L. Fault-Tolerant Control Based on Fractional Sliding Mode: Crawler Plant Protection Robot. Comput. Electr. Eng. 2023, 105, 108527. [Google Scholar] [CrossRef]
Figure 1.
Intelligent irrigation control system diagram: (a) irrigation equipment diagram; and (b) system schematic.
Figure 1.
Intelligent irrigation control system diagram: (a) irrigation equipment diagram; and (b) system schematic.

Figure 2.
Intelligent irrigation control method.

Figure 3.
Structure of the fuzzy sliding mode control system.

Figure 4.
This is a figure. Schemes follow the same formatting.

Figure 5.
Part of the irrigation monitoring cloud platform interface.

Figure 6.
Soil moisture data for July–September 2021 in Suzhou City, Anhui Province.

Figure 7.
Combined graph of test and predicted data.

Figure 8.
Graph of anticipated results.

Figure 9.
Comparison chart of test results.

Figure 10.
Graph of anticipated results.

Figure 11.
Affiliation functions for input and output quantities: (a) transpiration affiliation function; (b) precipitation affiliation function; (c) soil moisture affiliation function; and (d) irrigation volume affiliation function.
Figure 11.
Affiliation functions for input and output quantities: (a) transpiration affiliation function; (b) precipitation affiliation function; (c) soil moisture affiliation function; and (d) irrigation volume affiliation function.

Figure 12.
Fuzzy algorithm rule variable relationship diagram: (a) rainfall—soil moisture—irrigation; (b) rainfall—evapotranspiration—irrigation; and (c) soil moisture—transpiration—irrigation.
Figure 12.
Fuzzy algorithm rule variable relationship diagram: (a) rainfall—soil moisture—irrigation; (b) rainfall—evapotranspiration—irrigation; and (c) soil moisture—transpiration—irrigation.

Figure 13.
Graph of partial irrigation volume results.

Figure 14.
Comparison of rainfall forecast results.

Figure 15.
Comparison of predicted evapotranspiration results.

Figure 16.
Comparison of simulation results for different controllers: (a) simulation results of the PID controller; and (b) simulation results of the SMC controller.
Figure 16.
Comparison of simulation results for different controllers: (a) simulation results of the PID controller; and (b) simulation results of the SMC controller.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
AIC and BIC values for each model.
| Models | AIC | BIC | Models | AIC | BIC |
|---|---|---|---|---|---|
| ARIMA(0,0,1) | 1.6575 | 1.6576 | ARIMA(2,0,1) | 1.6531 | 1.6535 |
| ARIMA(0,0,2) | 1.6537 | 1.6539 | ARIMA(2,0,2) | 1.6532 | 1.6536 |
| ARIMA(0,0,3) | 1.6532 | 1.6535 | ARIMA(2,0,3) | 1.6532 | 1.6536 |
| ARIMA(1,0,0) | 1.7236 | 1.7237 | ARIMA(3,0,0) | 1.6956 | 1.6959 |
| ARIMA(1,0,1) | 1.6533 | 1.6536 | ARIMA(3,0,1) | 1.6532 | 1.6536 |
| ARIMA(1,0,2) | 1.6532 | 1.6535 | ARIMA(3,0,2) | 1.6532 | 1.6536 |
| ARIMA(1,0,3) | 1.6532 | 1.6535 | ARIMA(3,0,3) | 1.6532 | 1.6537 |
| ARIMA(2,0,0) | 1.7059 | 1.7062 |
Table 2.
AIC and BIC values for each model.
| Models | AIC | BIC | Models | AIC | BIC |
|---|---|---|---|---|---|
| ARIMA(0,0,1) | 2.4706 | 2.4718 | ARIMA(2,0,1) | 2.4422 | 2.4446 |
| ARIMA(0,0,2) | 2.4505 | 2.4523 | ARIMA(2,0,2) | 2.4418 | 2.4447 |
| ARIMA(0,0,3) | 2.4456 | 2.4480 | ARIMA(2,0,3) | 2.4421 | 2.4457 |
| ARIMA(1,0,0) | 2.4937 | 2.4949 | ARIMA(3,0,0) | 2.4712 | 2.4736 |
| ARIMA(1,0,1) | 2.4423 | 2.4441 | ARIMA(3,0,1) | 2.4421 | 2.4450 |
| ARIMA(1,0,2) | 2.4421 | 2.4445 | ARIMA(3,0,2) | 2.4422 | 2.4458 |
| ARIMA(1,0,3) | 2.4417 | 2.4446 | ARIMA(3,0,3) | 2.4417 | 2.4458 |
| ARIMA(2,0,0) | 2.4797 | 2.4815 |
Table 3.
The subset of fuzzy variables.
| Grade | Future Rainfall | Crop Transpiration | Soil Moisture | Amount of Irrigation |
|---|---|---|---|---|
| Extra small | VP | VT | VH | VI |
| Sightly small | SP | ST | SH | SI |
| Medium | MP | MT | MH | MI |
| Large | LP | LT | LH | LI |
| Extra large | XP | XT | XH | XI |
Table 4.
Fuzzy rules.
| Future Rainfall | Crop Transpiration | Soil Moisture | ||||
|---|---|---|---|---|---|---|
| VH | SH | MH | LH | XH | ||
| VP | VT | LI | MI | MI | MI | SI |
| SP | VT | MI | MI | SI | SI | SI |
| MP | VT | MI | SI | SI | SI | VI |
| LP | VT | SI | SI | SI | VI | VI |
| XP | VT | SI | VI | VI | VI | VI |
| VP | ST | LI | LI | MI | MI | SI |
| SP | ST | LI | MI | MI | SI | SI |
| MP | ST | MI | MI | SI | SI | SI |
| LP | ST | MI | SI | SI | SI | VI |
| XP | ST | SI | SI | VI | VI | VI |
| VP | MT | LI | LI | LI | MI | MI |
| SP | MT | LI | LI | MI | MI | SI |
| MP | MT | LI | MI | MI | SI | SI |
| LP | MT | MI | MI | SI | SI | VI |
| XP | MT | MI | SI | SI | VI | VI |
| VP | LT | XI | XI | LI | LI | MI |
| SP | LT | XI | LI | LI | MI | MI |
| MP | LT | LI | LI | MI | MI | SI |
| LP | LT | LI | MI | MI | SI | SI |
| XP | LT | MI | MI | MI | SI | VI |
| VP | XT | XI | XI | XI | XI | LI |
| SP | XT | XI | XI | XI | LI | LI |
| MP | XT | XI | XI | LI | LI | MI |
| LP | XT | XI | LI | LI | MI | MI |
| XP | XT | LI | LI | MI | MI | SI |
Table 5.
Controller parameters.
| Controllers | Parameter Values |
|---|---|
| SMC control | |
| PID control |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, X.; Li, Z.; Xie, D.; Wang, M.; Zhou, G.; Chen, L. Design of Farm Irrigation Control System Based on the Composite Controller. Actuators 2023, 12, 81. https://doi.org/10.3390/act12020081
AMA Style
Li X, Li Z, Xie D, Wang M, Zhou G, Chen L. Design of Farm Irrigation Control System Based on the Composite Controller. Actuators. 2023; 12(2):81. https://doi.org/10.3390/act12020081
Chicago/Turabian StyleLi, Xue, Zhiqiang Li, Dongbo Xie, Minxue Wang, Guoan Zhou, and Liqing Chen. 2023. "Design of Farm Irrigation Control System Based on the Composite Controller" Actuators 12, no. 2: 81. https://doi.org/10.3390/act12020081
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.