
A Review of Rehabilitative and Assistive Technologies for Upper-Body Exoskeletal Devices
by
 and
and
Emilly Hays
, 
Jack Slayton
,
Gary Tejeda-Godinez
,
Emily Carney
,
Kobe Cruz
,
Trevor Exley
and
Amir Jafari
* Advanced Robotic Manipulators Laboratory, Department of Biomedical Engineering, University of North Texas, Denton, TX 76207, USA
*
Author to whom correspondence should be addressed.
Actuators 2023, 12(4), 178; https://doi.org/10.3390/act12040178
Submission received: 3 March 2023
/
Revised: 11 April 2023
/
Accepted: 18 April 2023
/
Published: 20 April 2023
(This article belongs to the Special Issue Soft Robotics in Biomedical Application)
Abstract
:This journal review article focuses on the use of assistive and rehabilitative exoskeletons as a new opportunity for individuals with diminished mobility. The article aims to identify gaps and inconsistencies in state-of-the-art assistive and rehabilitative devices, with the overall goal of promoting innovation and improvement in this field. The literature review explores the mechanisms, actuators, and sensing procedures employed in each application, specifically focusing on passive shoulder supports and active soft robotic actuator gloves. Passive shoulder supports are an excellent option for bearing heavy loads, as they enable the load to be evenly distributed across the shoulder joint. This, in turn, reduces stress and strain around the surrounding muscles. On the other hand, the active soft robotic actuator glove is well suited for providing support and assistance by mimicking the characteristics of human muscle. This review reveals that these devices improve the overall standard of living for those who experience various impairments but also encounter limitations requiring redress. Overall, this article serves as a valuable resource for individuals working in the field of assistive and rehabilitative exoskeletons, providing insight into the state of the art and potential areas for improvement.
1. Introduction
Upper-limb exoskeletons, in recent years, have shown how they can transform the lives of individuals who experience impairment such as spinal cord injuries, strokes, or cerebral palsy. Devices on the market assist or rehabilitate impaired limbs such as the shoulder, forearm, and hand through various mechanisms and modes of actuation. Assistive devices are intended to aid and accommodate the user’s natural movements to achieve otherwise difficult or tedious actions. Rehabilitative devices aim to restore and improve the user’s impaired movements in order to achieve greater utilization.
The scope of this literature review is to examine the current solutions for upper-body limbs with an emphasis on the shoulder, arm, and hand. Within these categories, the review also indicates whether the device is assistive or rehabilitative. Branching from these topics, there are three main questions that arise: What is the mechanism of support? What is the method of actuation? What are the sensing procedures (if applicable)? Knowing these central ideas will allow readers to grasp the full concept and note where future work and improvements can be implemented.
The current state-of-the-art devices have to define the following: mechanisms, actuators, and sensing procedures. The primary mechanisms discussed for the shoulder include linkage, cable-driven, and gear-driven processes, whereas the mechanisms discussed for the hand include electromechanical, pneumatic, and hydraulic processes. All devices meet various deliverables that aid the user in one form or another; however, no device is without drawbacks. The current state-of-the-art devices are still striving to improve the following drawbacks: size and weight, cost, adaptability, control systems, and social acceptance. Many devices are still large and bulky, which hinders the user from experiencing the full benefits that are intended.
This literature review will attempt to identify the current understanding and gaps in the existing technologies and research. All the mechanisms and actuators will be defined for clarity across different devices. Then, the paper will go into further depth for devices existing on the market and research. These devices will be categorized into two ways: upper limb or hand and assistive or rehabilitative. Finally, the conclusion shall identify key findings and what future work needs to be considered in later innovation.
2. Control Strategies
2.1. Mechanisms for Upper-Limb Support
A majority of the power transmission systems used for upper-limb exoskeletons fall into three categories: linkage, cable-driven, or gear-driven mechanisms. Some of the designs listed below use a linkage mechanism in which interconnecting components are used to move down the system steadily. An advantage of this system is the reduction in extra components to transmit power, while one of its disadvantages is the weight gain from the need for stronger motors [1].
The cable-driven mechanism is designed to reduce the overall weight of the system by transferring the weight point to the user’s center of mass with a tension-driven mechanism. As a result of transferring the weight, the actuators can be placed anywhere needed on the body. The cable-driven system is the most common because of its quick and smooth transmission [1].
Gear-driven mechanisms or gear trains consist of an assembly of gears, shafts, or other elements that form a rotational mountain of parts. This form of mechanism is used to transmit shaft power from a driver such as a motor into the gear system for rotational motion. A large obstacle with this particular system is the weight because multidirectional loads need a sturdier material that can handle both axial and torsional loads [2].
2.2. Actuators for Assistive Hand Exoskeletons
Many soft robotic devices can be classified by the type of actuator used in the design. The three major types of actuators are pneumatic, hydraulic, and electric [3]. Actuators are mechanical devices that convert energy into motion; this involves a single change that can generate force to accomplish a task. This motion can operate to achieve lifting, blocking, clamping, etc. The actuator’s mechanized motion can make linear, rotary, or oscillatory movements.
Pneumatic actuators (Table 1) work by compressing air from atmospheric pressure into a higher yet safe and stable pressure. The components of a pneumatic actuator include a primary motor, compressor unit, air storage tank, delivery network housing, and actuator component [3].
Hydraulic actuators (Table 1) work much like pneumatic actuators, except fluid is used in place of air. Fluid is compressed, converting it into pressure, which produces a motion output. The most common fluid for a hydraulic system is oil due to incompressibility. The high viscosity of oil enables a high compression force for a large transfer of energy by volume. These types of actuators are simple mechanisms with a controlled throttle, a piston or ram, and a network of tubes or hoses to create controlled channels of pressure [3].
Electric actuators (Table 1) are powered by electricity. They work by alternating current, which energizes the electric motor to convert it into torque to drive the actuator. This actuator uses mechanical elements such as lead screws and gear ratios to open and close their applications. This actuator system includes the motor in the actuator assembly, rather than a separate piece [3].
Elastic actuators, or series elastic actuators (SEAs), incorporate an elastic element such as a spring in series with the principal actuator to provide some advantages. They are mostly used where force control is a major deliverable of the design and its application because SEAs are capable of tolerating impact loads, can passively store mechanical energy, and have low mechanical output impedance in comparison to actuators that are only rigid [4].
Electroactive polymer actuators are made of materials that can change size and shape in response to electrical stimuli, resulting in sizable stress and strain. Electromechanically active polymers (EAPs) can be either electronic EAPs, which respond to electrically induced ion transport, or ionic EAPs, which respond to electrostatic forces. They feature high mechanical flexibility, low weight, and a simple and versatile structure, and they do not generate acoustic noise or heat during actuation. EAP transducers are used for applications where muscle-like structural or functional properties are desired, and EAPs are promising materials for applications in biomimetic robotic motion [5,6].
2.3. Sensing Methods for Assistive Hand Exoskeletons
2.3.1. Biosignals
There are two main biosignal methods used in soft robotic exoskeletons: electromyography (EMG) and electroencephalography (EEG) (Table 2). There are distinct advantages and disadvantages to both EMG and EEG as biosignal methods for controlling the actuation of a hand exoskeleton. Overall, both support a biocompatible symbiotic relationship with the user of the device for ease of use [7].
2.3.2. Position
Position-based sensing equipment is popular due to its simplicity for both users and administrators. Most position-based sensors currently used for assistive hand exoskeletons are potentiometers, Hall-effect sensors, encoders, etc. [7]. Position sensors are excellent for tracking the movement of the hand and its appendages but lack the predictive component to assist with hand motion when the wearer initializes an action.
2.3.3. Force
Another way measurements of force can be used to sense movement is by utilizing strain gauges. As the name implies, a strain gauge is an electronic component that uses resistive foils and other materials to convert environment variables such as applied forces or amount of fluid pressure into an electrical signal that can be measured through data acquisition [9,10]. One recent development is the design of soft shielded force sensors, which consist of air and liquid metal channels embedded in a silicone matrix. This soft silicone melds well with human tissue for a more comfortable and close measurement of force [11].
3. Upper-Limb Exoskeletons
3.1. Assistive
Among the current state-of-the-art devices, there is a limited range of exoskeleton support systems for just the shoulder. The majority of the examples of assistive upper-limb exoskeletons are intended for industrial overhead tasks, for use by workers carrying heavy loads repetitively, who are at risk for injury.
3.1.1. AIRFRAME
The AIRFRAME by Levitate Technologies (Figure 1A) is a passive shoulder support frame made of aluminum that is mechanically self-powered, using a system of pulleys rather than a battery [12]. The AIRFRAME’s goal is to relieve upper-extremity muscles and joints from discomfort, fatigue, and strain during repetitive or overhead motions in an industrial setting [13]. The structure works by counterbalancing; it transfers the weight held by the arms from the shoulders and upper back to the outside of the hips for an even distribution of energy. The pulley system used in the AIRFRAME is progressively activated as the arm is raised; stays in place, providing support as long as the arm stays up; and is gradually released as the arm is lowered. The frame is personalized to fit each wearer to ensure seamless motion and dexterity, and it weighs only 5 pounds (~2.27 kg) [14].
3.1.2. Hyundai VEX
The Hyundai Motor Group has developed the Vest EXoskeleton (VEX) (Figure 1B). Similarly, to the AIRFRAME, the VEX is worn around the upper arms and shoulders, to assist industrial workers with repetitive overhead tasks; is adjustable for multiple wearer sizes; and functions without the use of a battery [15]. The VEX has a polycentric axis that includes multiple pivot points, which allows it to mimic the wearer’s shoulder joint movement with great accuracy. It functions using a “multilink lift assistant module”, which stores energy and then dissipates it through a spring according to the angle of the wearer’s upper arm [16]. The VEX weighs 2.5 kg and can provide an adjustable amount of force assistance, with a total of six levels ranging up to 5.5 kgf [15].
3.1.3. Ekso Bionics EVO
The Ekso Bionics upper-extremity exoskeleton vest (Figure 1C) works to help industrial workers as they lift heavy loads and perform repetitive tasks, reducing their risk of injury. It has adjustable, high-force actuators powered by a set of compact gas springs and can vary the amount of added force depending on the task independently for each arm. The contact points are reduced to only around the upper arm and around the hips, reducing user discomfort and eliminating the need for shoulder straps [17]. It also has a protective sleeve that hides and protects the joint mechanism. Its stacked link structure maintains joint alignment and follows the body’s motion, allowing it to move and provide passive assistance while reaching overhead, across the body, or backward [18].
3.1.4. Ottobock Shoulder
The structure and use of the Ottobock exoskeleton (Figure 1D) are similar to those aforementioned; it is worn like a backpack, provides passive support without the use of a battery, and is mostly used in industrial settings to reduce worker injuries. However, it differs in the way that it provides mechanical support to the user’s arms, instead of using a system of springs. This spring and cable system adsorbs the potential energy from the user’s upper extremity and then disperses it during an upward motion to provide supporting force. This allows the system to continuously release the stored energy to reduce the effort required to raise the user’s arm. The device also allows for a large range of motion, with simple adjustment options and easy-to-remove textiles that can be washed [19]. The Ottobock Shoulder is an improvement to the PAEXO passive exoskeleton and now features a reversible magnetic clasp, improved arm cuffs, an injection-molded cover, and a reduced don/doff time of 20 s [20].
3.1.5. Wearable Soft Robot for the Shoulder
The wearable soft robot presented by O’Neill [21] (Figure 1E) consists of a neoprene vest to which two types of textile-based pneumatic actuators are attached. One actuator assists in the abduction of the shoulder, while two actuators assist in the left and right horizontal flexion and extension. Unlike the aforementioned assistive arm supports, this soft robot for the shoulder uses pressurized air instead of the potential energy stored in springs and pulleys and is less directed toward overhead industrial applications. Instead, this device aims to support people performing activities of daily life. The soft actuators in this model also disperse the applied force to the body so that peak contact forces and rigidity are minimized, increasing user comfort. The total weight of all worn components is 0.48 kg, and the device folds flat when unpowered, making it incredibly light and compact in comparison to its competitors [21].

3.2. Rehabilitative
Rehabilitative exoskeletons are used as part of robot-assisted therapy, which allows patients with motion impairments to train unused muscles and regain brain–muscle connection. This is typically performed under the constant supervision of a rehabilitation therapist, but some recent devices have been developed for independent, at-home use.
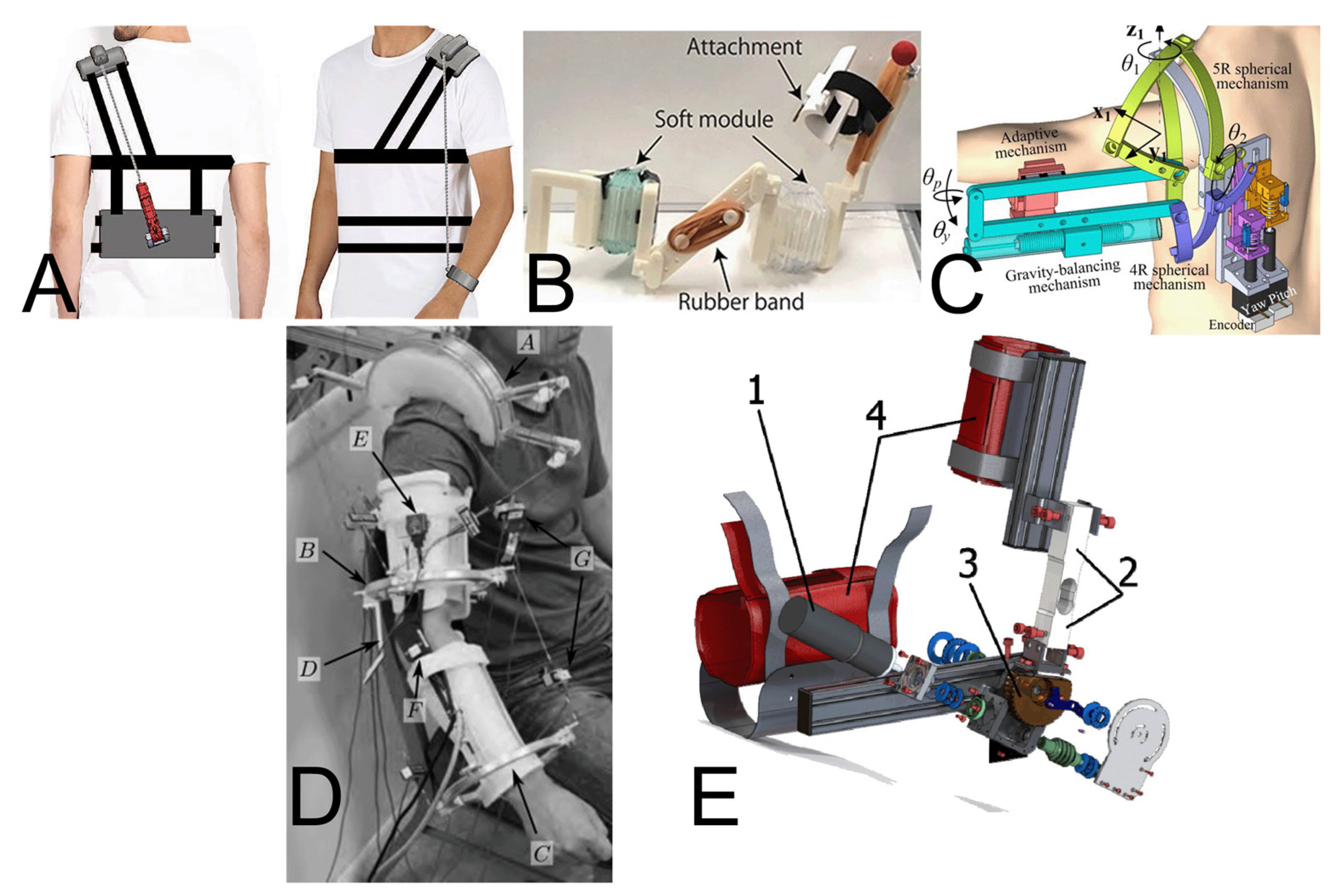
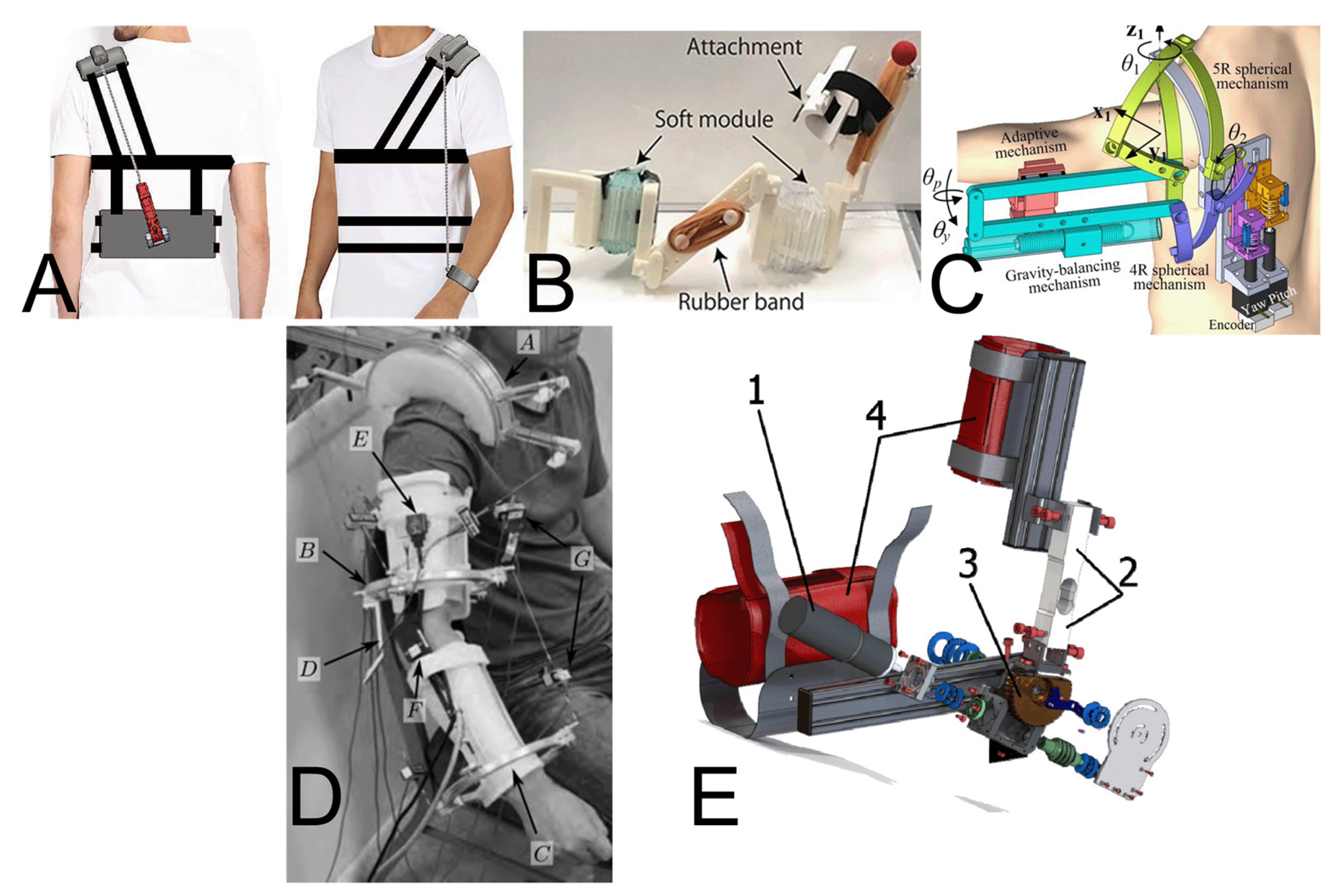
3.2.1. Upper-Limb Exoskeleton for Rehabilitation
This arm rehabilitation device (Figure 2A) is a balanced exoskeleton that utilizes a twisted string actuation (TSA) and an integrated force sensor. It is designed for the training and rehabilitation of the upper limb and features lightweight, compact, and wearable robotic components. Twisted string actuation works by using strings that are attached to a rotating electrical motor on one end and a linear moving element on the other. As the motor rotates, the strings twist, reducing the string length and converting the rotational force produced by the motor into linear motion [22]. The device actuation is controlled by sEMG on the bicep; the TSA module applies force when the sEMG signal is between the lower and higher thresholds for muscle activation that are determined for the subject during calibration. The device currently has the capability to provide load compensation to the user’s elbow joint during lifting [23].
3.2.2. Exoskeleton Actuated by Soft Modules (EASoftM)
This is a proposed design (Figure 2B) that aims to deliver a few degrees of freedom, complaint assistance, and precise motion control for use in rehabilitation for people with neuromuscular weakness. It mainly focuses on fulfilling the reaching and grasping tasks. The device’s ultra-light system is made entirely of rubber and soft modules and utilizes pneumatic actuators made of plastic sheets [24]. It works based on a vision-based control law that uses position and image sensors simultaneously [25], which allows the user to perform precise reaching motions within a few millimeters of accuracy. The soft actuator concept in this model was developed for small motions such as grasping; however, the proposed integrated system is ideal for neurorehabilitation for an affordable, wearable, and portable system to be completely customizable by the user’s needs [24].
3.2.3. Parallel-Actuated Shoulder Exoskeleton
This shoulder device (Figure 2C) is designed with two spherical and two sliding crank mechanisms, which work together to create a parallel-actuated shoulder device [26]. The spherical mechanism is proposed to replicate the shoulder movements, which have three DOFs [27]. The main actuators are set parallel to one another to create a structure that balances with gravity. If the user misaligns, the passive joint’s adaptive mechanism will assist the exoskeleton to compensate [26]. The elastic actuator in each series uses a single linear compression spring that generates unidirectional force through compression between a linear stepper motor and a slider [28], and the two gravity mechanisms minimize the load on the motor [29]. Linear SEAs provide accurate force and control of the user’s interface with the exoskeleton, and the overall bidirectional actuation design between the user and exoskeleton makes the device versatile and suitable to be used in various rehabilitation processes in the future [26].
3.2.4. Actuated Cable-Driven Arm Exoskeleton (CAREX)
The cable-driven arm exoskeleton (CAREX) (Figure 2D) design is a cable-driven parallel upper-arm mechanism for neural rehabilitation. It uses lightweight cuffs on the moving parts of the arm rather than rigid links, and these cuffs are moved by motor-driven cables, which in turn move the segments of the arm [30]. This novel design redirects the cables from the proximal to the distal segments of the arm, preserving the arm’s natural degrees of motion. The device’s architecture allows for optimal agile arm motions, with a total weight of 1.55 kg. Along with the absence of a rigid joint and components, there is a possibility for reaction forces to interact with the arm joints of the user. However, the use of a tension controller minimizes the total cable tension to reduce the activity of reaction forces on the user [31]. In experiments where CAREX is attached to an arm orthosis on human subjects, researchers found that the subjects were able to utilize the exoskeleton’s “assist-as-needed” forces to produce motion that is closer to a prescribed circular path [32].
3.2.5. Active Rehabilitation Orthosis
The active elbow orthosis (Figure 2E) is a device that determines the motion activity of the user with a strain gauge and then utilizes the measured value to control the actuator that drives the forearm. The device also has different operative modes, such as passive, active, resistance, and override modes. These setting modes allow the user to start the robotic rehabilitation process at any point in their recovery. The passive mode lets the user control the movement of the arm by their own force only, the active mode has users perform a motion for the actuators to engage to that direction with an applied force, and the resistance mode has defined angular limitations for users to resist the motion such as pushing against the output force. Lastly, the override mode is an extension of the active mode that works without angular limits to move the forearm further to a preset angle. It comprises an arm and forearm frame, connected by a self-locking worm gear that is housed in both axial and radial bearings and driven by a DC motor (RE36, Maxon, Switzerland). The strain-gauge-based single-point sensor, which measures how much effort is being applied by the patient to move their forearm, is also housed here [33].
4. Hand Exoskeleton
4.1. Assistive
Assistive hand exoskeletons provide support to individuals who have impairments in hand function due to injury or illness. These devices provide external mechanical support to help people perform activities of daily life such as grasping and manipulating objects that would otherwise be impossible due to lack of strength or dexterity. Instead of training the hand over time to regain the lost function through resistance training, assistive exoskeletons are purely for additional support, allowing individuals to regain independence in everyday life regardless of their impairments.
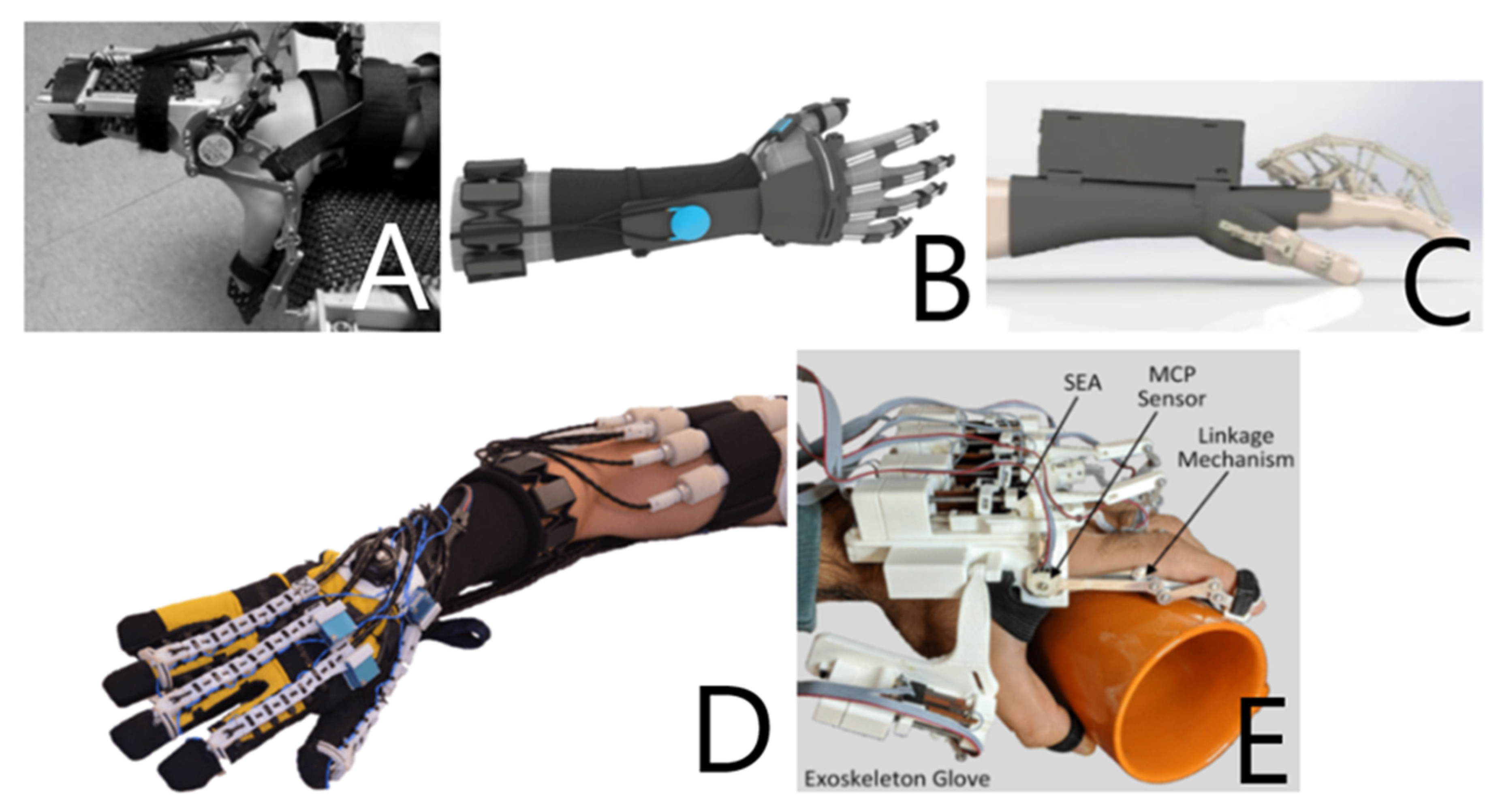
4.1.1. Pediatric Hand Exoskeleton (PEXO)
This bimanual exoskeleton (Figure 3A) is optimized to benefit young patients with minimal hand mobility caused by sensorimotor impairments. It is a fully wearable robotic hand exoskeleton that works to support the user’s hand in daily tasks, using various grasp types. It provides visual feedback on the muscle activity in the forearm, a particularly helpful feature for children learning to use the exoskeleton [34]. The device reduces the amount of weight applied to the hand, thereby reducing muscle fatigue in the hand and fingers. However, the range of motion applicable to the PEXO is not enough to allow the user to fully close their hand into a fist. This is not considered a significant limitation, however, because neither a full hand closure nor maximum grip strength is crucial for most daily tasks [35]. Its actuation mechanism uses spring steel, which transfers force to the fingertips [36], and its control mechanism is a manual trigger that allows the user to directly control the exoskeleton [37].
4.1.2. Harvard–Cambridge Soft Robotic Glove
This device(Figure 3B) was developed by students from both Harvard and Cambridge and uses hydraulic actuators to augment the patient’s hand in order to increase the functional grasp. The glove has soft fiber-reinforced tubing that mimics the movement of the fingers and thumb. To achieve this effect, the tubing was created within a mold where certain points had a lower wall thickness to allow for the freedom to move similar to that of the joints. The authors note that it allows for extending, twisting, and bending [38], produced by hydraulic actuators. These soft actuators are molded, fiber-reinforced, and segmented elastomeric bladders that are pressurized by fluid to produce these motions. The device’s hydraulic pump, power components, and supporting electronics are housed in a table-top NEMA box [39].
4.1.3. University of Basrah Soft Robotic Glove
A team of students from the University of Basrah have proposed a pneumatic soft robotic exoskeleton (Figure 3C) that uses both cascaded position and forces closed-loop intelligent controllers with pneumatic soft actuators [38]. This configuration is jointless, relying only on one actuator per finger to produce bending force [40]. Most non-smart exoskeletons use either position, force, or biosignals as control mechanisms; these authors used a force controller with a neural network that uses the index finger’s bending angle to set a desired pressure set point, and a fuzzy logic controller to control the pressure amount. This allows for an intuitive control method that uses a biosignal but accounts for its occasional unreliability to more closely match the user’s true intentions [38].
4.1.4. OPEN BIONICS Body-Powered Exoskeleton Glove
This body-powered exo-glove (Figure 3D)was designed for enhancement in grasping assistance and capabilities for the user. The device consists of four different components: a soft glove, a tension cord, an adjustment mechanism, and a harness. The device evenly distributes the grasping forces in the fingers. The body-powered mechanism transmits the forces from the upper body to the index finger, middle finger, and thumb through the tension routing system. It is adjustable for all body types but only in the glove and harness, because these components rely on the user’s height and weight [41,42].
4.1.5. Assistive Exoskeleton Hand Glove (Exo-Glove PM)
The Exo-Glove PM device (Figure 3E) is based on soft pneumatic actuators made of silicone and fabric, making them highly deformable and lightweight. As air pressure is applied through the silicone-based tubes to the soft actuators, the actuator bends because the rubber sheet at its base resists extension. The Exo-Glove PM is able to perform a variety of hand postures for object grasping, according to the object’s size and shape. Most notably, the size of the glove is customizable by varying the length of the rigid 3D-printed spacers that are used to join the actuators together [43]. This method absorbs individual differences in finger size and greatly reduces the cost of customization and repair [44]. To control the device actuation, the glove uses an open-loop control system and solenoid valves to produce experimentally derived pressure values [45] and a specific amount of continuous pressure to apply sustained gripping force [7].

4.2. Rehabilitative
Rehabilitative hand exoskeletons are similar in structure to their assistive counterparts but differ in their application. As the name suggests, these devices are used as tools in a rehabilitative program conducted with a therapist. Typically, they offer resistance that trains the muscles in the hand, eventually restoring some motor capabilities.
4.2.1. HandSOME
The Hand Spring-Operated Movement Enhancer, also known as HandSOME (Figure 4A), is a device designed to assist and rehabilitate stroke patients with impaired hand function. Its innovative design utilizes a four-bar linkage system that induces both extension and pinch-grasping movements in the hand. As the fingers extend, the thumb extends, and as the fingers flex, the thumb also flexes. The device is entirely passive, relying solely on the force generated by one side of the hand to assist the other side [46]. One at-home rehabilitation study found that the movement enhancer reduced users’ impairment and improved hand function after four weeks of reach and grasp task practice, but these gains were not significant in the long term, suggesting that it requires a long period of home training to be effective for rehabilitation [47].
4.2.2. RELab Tenoexo
The RELab Tenoexo (Figure 4B) is a fully wearable robotic hand apparatus that provides grasping assistance for people who have impaired motor function in their hands. The design is capable of several grasping types to enable a large range of operations and includes a thumb module that is capable of both opposition and lateral grasps. It includes two cable-based remote actuation system (RAS) units and a sliding spring mechanism that allows adaptation for grasping objects of differing shapes. Each RAS unit has a DC servo motor, which is pulled by a cable mechanism in one direction and moves in the opposite direction through a loaded spring. This produces a bidirectional output that drives the three-layered spring mechanism, which induces bending in the springs in response to the length change induced by the linear displacement of a sliding spring blade on top of a fixed spring blade. The bending motion is confined by the third layer of spring blades as well as additional rigid elements, which produce finger motion that is highly similar to natural movement [48]. The device is very lightweight, including a hand model that weighs 0.148 kg, an armband weighing 0.093 kg, and a motor backpack that weighs 0.560 kg [49]. However, it is important to note that the RELab Tenoexo can generate only 4.5 Newtons of grip force per finger, a very small amount compared with the average grip force used in daily activities, 70 Newtons [50].
4.2.3. Hand Exoskeleton for Post-Stroke Patients
This 3D-printed dynamic hand exoskeleton (Figure 4C) was proposed as a tool for hand rehabilitation [51]. Like HandSOME, it uses a four-bar linkage mechanism [40]. It uses a cable-actuated extension and spring-return mechanism mounted on a forearm support that also holds the actuators and control unit. It uses sEMG signals to determine muscle activity and the mean absolute value (MAV) [52] to determine handgrip strength. These signals are used to determine the intention for hand opening or closing and translate this to the actuators, which are connected using three bands on each finger to enable flexion and extension of all sections of the phalange. Experimental testing with hand-impaired subjects found the device to be highly effective for users in an advanced stage of therapy [53].
4.2.4. Hybrid Rigid–Soft Exoskeleton to Assist Functional Dexterity
This high-performance glove (Figure 4D) can achieve more poses than comparable gloves, due to its incorporation of a multidegree of motion thumb. It has a hybrid design with both rigid and soft elements, preventing the hyperextension of the finger joints [50] while still being suitable for training users in activities of daily life (ADLs) such as heavy lifting. This design presents the user with both assistive and rehabilitative properties. The device features intent detection, wearable sensors, ergonomic soft design, and assistive technologies [54].
4.2.5. Naturalistic Exoskeleton Glove
Using a predictive algorithm, the haptic controller in this device (Figure 4E) measures the metacarpophalangeal (MCP) joint angle data that are used to determine grasp type. The read messages from the signals are then calibrated into a hand configuration in order to perform a grasping motion of an object [55]. The grasp prediction algorithm was developed based on the HUST finger and hand motion dataset [56,57] and was able to perform motion for five activities, with an average accuracy of approximately 75 percent [58]. This exoskeleton uses electric actuators and was constructed to display the functionality of the predictive algorithms rather than as a product for the market [55].
5. Discussion
5.1. Design Analysis
After comparing the state-of-the-art device designs, there are several key takeaways to consider. Exoskeleton designs highlight the importance of carefully considering the different modes of actuation for different applications. For shoulder supports, the higher the degree of freedom (DOF), the more natural the experience is, but it requires more complex mechanisms and a larger load on the user to wear. Passive shoulder supports are favored because they are lightweight, have low cost, and are ergonomic for a comfortable user experience. However, limited assistance and feedback are provided to the user to gauge the level of support provided.
Hand-based devices, often pneumatic, benefit from the quick response time and compressibility of the air for precision. Electromechanical actuators provide a larger precision and force output; however, they are higher in cost and need more maintenance. Hydraulic actuators offer a great amount of force output, precise control, and compact design for space-limited areas such as the fingers; however, there is potential for fluid to leak, and their design is complex to construct.
5.2. Design Challenges
The complex anatomical structures of the upper limb present a challenge for the design of shoulder and hand exoskeletons. To support joint movement during abduction and adduction, exoskeletons must accurately replicate the joints’ motions to overcome misalignment issues and improve kinematic compatibility. Some studies have proposed using spherical mechanisms to replicate the three degrees of freedom of the shoulder and wrist movements, based on the assumption that they are both ball-and-socket joints. However, this approach may impact the instantaneous center of rotation within these joints. Additionally, the thumb is the most complex structure, and its kinematic modeling of movements is still undefined.
5.3. Future Work
Many of the current devices, especially the rehabilitative exoskeletons, require a laboratory setting with professionals to assist in the operation. This is limiting to the patient, especially considering the fact that the end goal of their rehabilitation is an increase in their independence. Researchers and engineers should consider the dependency on their devices and the ways to limit the need for expert intervention. A simple user interface, along with low cost and weight, can allow patients to use the device independently in their everyday lives without additional support.
Device accessibility is a major component of future research that should be considered moving forward. Many people who experience an impairment either cannot afford the equipment or cannot physically operate the devices that are currently on the market. While major advancements and accessories may increase the functionality of these devices, an increased cost limit creates a barrier of entry that limits the target population from adopting the solution. This, in turn, limits the amount of overall assistance the device can have on the target population. The additional weight of a device is a considerable factor to a patient, especially for those with sensorimotor impairments, which also affect their muscle density, as additional weight can alter the user’s natural stance as they compensate for the load.
To partially offset the cost of acquiring an exoskeleton for a motor-impaired person, future designers should aim to incorporate multiple functions in one device. While this paper categorizes and differentiates assistive and rehabilitative devices, there is potential for a hybrid device that combines these two functions by providing assistance to the patient as they perform everyday tasks while also having the capability to change the amount of force provided and perform resistance training.
Overall, the current state of the art for shoulder and hand exoskeletons includes devices that each have their own novelties and limitations, such as size, weight, cost, application, or kinematic compatibility. By identifying and analyzing the major competitors, we can gain valuable insight into how to develop more effective devices for a larger population. The most important factor, overall, should be maximizing the added benefits to the daily lives of the target population, whether that be people who perform repetitive overhead labor, in the case of assistive shoulder exoskeletons, or those who have motor impairments that require assistance and rehabilitation of underused muscles.
Author Contributions
Writing introduction, K.C.; Writing assistive and rehabilitative upper limb exoskeletons sections, E.H.; Writing assistive and rehabilitative hand exoskeletons sections, K.C., G.T.-G.; Writing discussion section, E.H., K.C., and J.S.; Major revisions, E.C.; Additional source acquisition, E.C.; editing and supervision T.E. funding acquisition A.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by the National Science Foundation (NSF) under grant number 2045177.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Velling, A. Mechanical Power Transmission. Fractory. 21 November 2022. Available online: https://fractory.com/mechanical-power-transmission/ (accessed on 4 April 2023).
- IQS Directory. Gear Drive (Speed Reducers). In What Is It? Types, Uses, Components, Design; Gear Drive: Grand Rapids, MI, USA, 2022. [Google Scholar]
- Baker, M. Hydraulic vs. Pneumatic vs. Electric Actuators: Differences; York PMH: York, PA, USA, 2019. [Google Scholar]
- Leal Junior, A.G.; de Andrade, R.M.; Filho, A.B. Series Elastic Actuator: Design, Analysis and Comparison. Recent Adv. Robot. Syst. 2016. [Google Scholar] [CrossRef]
- EuroEAP Administrator. (n.d.). Scientific Background—Electromechanically Active Polymer (EAP) Transducers & Artificial Muscles. EuroEAP Platform. Available online: http://www.euroeap.eu/index.php/eap-transducers-artificial-muscles (accessed on 4 April 2023).
- Carpi, F.; Kornbluh, R.; Sommer-Larsen, P.; Alici, G. Electroactive polymer actuators as artificial muscles: Are they ready for bioinspired applications? Bioinspiration Biomim. 2011, 6, 045006. [Google Scholar] [CrossRef]
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward Soft Robotics: A Decade Review of the Design of Hand Exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef]
- Nachazel, T. What Is a Strain Gauge and How Does It Work? Michigan Scientific Corporation: Charlevoix, MI, USA, 2022. [Google Scholar]
- Zahak, M. Signal Acquisition Using Surface EMG and Circuit Design Considerations for Robotic Prosthesis. Comput. Intell. Electromyogr. Anal.—A Perspect. Curr. Appl. Future Chall. 2012, 18, 427–448. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef]
- Aksoy, B.; Hao, Y.; Grasso, G.; Digumarti, K.M.; Cacucciolo, V.; Shea, H. Shielded soft force sensors. Nat. Commun. 2022, 13, 1–12. [Google Scholar] [CrossRef]
- Rubenstone, J. Mechanical Exoskeleton Eases Strain of Overhead Work; Engineering NewsRecord RSS. 2019. Available online: https://www.enr.com/articles/47967-mechanical-exoskeleton-eases-strain-of-overhead-work (accessed on 4 April 2023).
- AIRFRAME. LEVITATE Technologies. 2020. Available online: https://www.levitatetech.com/airframe/ (accessed on 4 April 2023).
- Exoskeleton Report. AIRFRAME. 2022. Available online: https://exoskeletonreport.com/product/airframe/ (accessed on 4 April 2023).
- Hyundai Develops Wearable Vest Exoskeleton for Overhead Work; Hyundai. 2019. Available online: https://www.hyundai.news/uk/articles/press-releases/hyundai-develops-wearable-vest-exoskeleton-for-overhead-work.html (accessed on 4 April 2023).
- Hyun, D.J.; Bae, K.; Kim, K.; Nam, S.; Lee, D.-H. A light-weight passive upper arm assistive exoskeleton based on multi-linkage spring-energy dissipation mechanism for overhead tasks. Robot. Auton. Syst. 2019, 122, 103309. Available online: https://www.sciencedirect.com/science/article/abs/pii/S0921889019304464?via%3Dihub#fig2 (accessed on 4 April 2023). [CrossRef]
- Ekso Lifts Your Construction Team. Ekso Bionics. 2019. Available online: https://eksobionics.com/construction/ (accessed on 4 April 2023).
- Evo. Exoskeleton Report. 16 January 2021. Available online: https://exoskeletonreport.com/product/evo/ (accessed on 4 April 2023).
- Ottobock Shoulder; (n.d.); Ottobock. Available online: https://ottobockexoskeletons.com/obs/?lang=en&lang=en (accessed on 4 April 2023).
- Ottobock Shoulder. Exoskeleton Report. 22 April 2022. Available online: https://exoskeletonreport.com/product/ottobock-shoulder/ (accessed on 4 April 2023).
- O’Neill, C.T.; Phipps, N.S.; Cappello, L.; Paganoni, S.; Walsh, C.J. A soft wearable robot for the shoulder: Design, characterization, and preliminary testing. Int. Conf. Rehabil. Robot. (ICORR) 2017, 1672–1678. [Google Scholar] [CrossRef]
- Wurtz, T.; May, C.; Holz, B.; Natale, C.; Palli, G.; Melchiorri, C. The twisted string actuation system: Modeling and control. In Proceedings of the 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, QC, Canada, 6–9 July 2010; pp. 1215–1220. [Google Scholar]
- Mohssen Hosseini, R.M. A Wearable Robotic Device Based on Twisted String Actuation for Rehabilitation and Assistive Applications; Hundawi. 2017. Available online: https://www.hindawi.com/journals/jr/2017/3036468/ (accessed on 4 April 2023).
- Victoria, W.; Oguntosin, Y.M. Design and Validation of Exoskeleton Actuated by Soft Modules toward Neurorehabilitation—Vision-Based Control for Precise Reaching Motion of Upper Limb; Frontiers in Neuroscience. 2017. Available online: https://www.frontiersin.org/articles/10.3389/fnins.2017.00352/full (accessed on 4 April 2023).
- Nishida, R.; Kawamura, S. A new feedback robot control method based on position/image sensor integration. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 5012–5017. [Google Scholar] [CrossRef]
- Hsieh, H.-C.; Chen, D.-F.; Chien, L.; Lan, C.-C. Design of a Parallel Actuated Exoskeleton for Adaptive and Safe Robotic Shoulder Rehabilitation. IEEE/ASME Trans. Mechatronics 2017, 22, 2034–2045. [Google Scholar] [CrossRef]
- Gull, M.A.; Bai, S.; Bak, T. A Review on Design of Upper Limb Exoskeletons. Robotics 2020, 9, 16. [Google Scholar] [CrossRef]
- Sun, Y.; Hu, J.; Huang, R. Negative-Stiffness Structure Vibration-Isolation Design and Impedance Control for a Lower Limb Exoskeleton Robot. Actuators 2023, 12, 147. [Google Scholar] [CrossRef]
- Ogenyi, U.E.; Liu, J.; Yang, C.; Ju, Z.; Liu, H. Physical Human–Robot Collaboration: Robotic Systems, Learning Methods, Collaborative Strategies, Sensors, and Actuators. IEEE Trans. Cybern. 2019, 51, 1888–1901. [Google Scholar] [CrossRef]
- Mao, Y.; Agrawal, S.K. Transition from mechanical arm to human arm with CAREX: A cable driven ARm EXoskeleton (CAREX) for neural rehabilitation. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar] [CrossRef]
- Mao, Y.; Agrawal, S.K. Design of a Cable-Driven Arm Exoskeleton (CAREX) for Neural Rehabilitation. IEEE Trans. Robot. 2012, 28, 922–931. [Google Scholar] [CrossRef]
- Mao, Y.; Jin, X.; Dutta, G.G.; Scholz, J.P.; Agrawal, S.K. Human movement training with a cable driven ARm EXoskeleton (CAREX). IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 84–92. [Google Scholar] [CrossRef]
- Active Elbow Orthosis—Tomas Ripel, Jiri Krejsa, Jan Hrbacek, Igor Cizmar. 2014. Available online: https://journals.sagepub.com/doi/10.5772/58874 (accessed on 4 April 2023).
- Butzer, T.; Dittli, J.; Lieber, J.; van Hedel, H.J.; Meyer-Heim, A.; Lambercy, O.; Gassert, R. PEXO—A Pediatric Whole Hand Exoskeleton for Grasping Assistance in Task-Oriented Training. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019. [Google Scholar] [CrossRef]
- Lieber, J.; Dittli, J.; Lambercy, O.; Gassert, R.; Meyer-Heim, A.; van Hedel, H.J. Clinical Utility of a Pediatric Hand Exoskeleton: Identifying Users, Practicability, and Acceptance, and Recommendations for Design Improvement. J. NeuroEngineering Rehabil. 2022, 19, 17. [Google Scholar] [CrossRef]
- Daniel, C. A Linear Actuator/Spring Steel-Driven Glove for Assisting Individuals with Activities of Daily Living. 2020. Available online: https://www.researchgate.net/publication/341439193_A_Linear_ActuatorSpring_Steel-Driven_Glove_for_Assisting_Individuals_with_Activities_of_Daily_Living/citation/download (accessed on 4 April 2023).
- Gantenbein, J.; Dittli, J.; Meyer, J.T.; Gassert, R.; Lambercy, O. Intention Detection Strategies for Robotic Upper-Limb Orthoses: A Scoping Review Considering Usability, Daily Life Application, and User Evaluation. Front. Neurorobotics 2022, 16, 815693. [Google Scholar] [CrossRef]
- Wyss Institute, April 2022. Soft Robotic Glove for Neuromuscular Rehabilitation. Available online: https://wyss.harvard.edu/technology/soft-robotic-glove/ (accessed on 4 April 2023).
- Polygerinos, P.; Galloway, K.C.; Savage, E.; Herman, M.; Donnell, K.O.; Walsh, C.J. Soft robotic glove for hand rehabilitation and task specific training. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2913–2919. [Google Scholar] [CrossRef]
- du Plessis, T.; Djouani, K.; Oosthuizen, C. A Review of Active Hand Exoskeletons for Rehabilitation and Assistance. Robotics 2021, 10, 40. [Google Scholar] [CrossRef]
- OpenBionics. (n.d.). Exoskeleton Gloves. OPENBIONICS. Available online: https://openbionics.org/exoskeleton-gloves/ (accessed on 4 April 2023).
- OpenBionics, O.B. OpenBionics/Body-Powered-Exoskeleton-Glove: Body-Powered, Tendon-Driven, Wearable Exoskeleton Glove for Grasping Capabilities Enhancement. GitHub. 2019. Available online: https://github.com/OpenBionics/Body-Powered-Exoskeleton-Glove (accessed on 4 April 2023).
- Yun, S.-S.; Kang, B.B.; Cho, K.-J. Exo-Glove PM: An Easily Customizable Modularized Pneumatic Assistive Glove. IEEE Robot. Autom. Lett. 2017, 2, 1725–1732. [Google Scholar] [CrossRef]
- Kokubu, S.; Wang, Y.; Vinocour, P.E.T.; Lu, Y.; Huang, S.; Nishimura, R.; Hsueh, Y.-H.; Yu, W. Evaluation of Fiber-Reinforced Modular Soft Actuators for Individualized Soft Rehabilitation Gloves. Actuators 2022, 11, 84. [Google Scholar] [CrossRef]
- Goia, L.S.; Campo, A.B.; Colon, D. Modelling, Control and Applications of Soft Pneumatic Actuators in Upper-Limb Exoskeletons: A Systematic Review. In Proceedings of the 2022 Latin American Robotics Symposium (LARS), 2022 Brazilian Symposium on Robotics (SBR), and 2022 Workshop on Robotics in Education (WRE), São Bernardo do Campo, Brazil, 18–21 October 2022. [Google Scholar] [CrossRef]
- Brokaw, E.B.; Black, I.; Holley, R.J.; Lum, P.S. Hand Spring Operated Movement Enhancer (HandSOME): A Portable, Passive Hand Exoskeleton for Stroke Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 391–399. [Google Scholar] [CrossRef]
- Chen, J.; Nichols, D.; Brokaw, E.B.; Lum, P.S. Home-Based Therapy After Stroke Using the Hand Spring Operated Movement Enhancer (HandSOME). IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 2305–2312. [Google Scholar] [CrossRef]
- Dittli, J.; Hofmann, U.A.T.; Bützer, T.; Smit, G.; Lambercy, O.; Gassert, R. Remote Actuation Systems for Fully Wearable Assistive Devices: Requirements, Selection, and Optimization for Out-of-the-Lab Application of a Hand Exoskeleton. Front. Robot. AI 2021, 7, 596185. [Google Scholar] [CrossRef]
- Eidgenössische Technische Hochschule Zürich. RELab Tenoexo: A Robotic Hand Orthosis for Therapy and Assistance in Activities of Daily Living. Rehabilitation Engineering Laboratory—ETH Zurich. 2022. Available online: https://relab.ethz.ch/research/current-research-projects/robotic-hand-orthosis-for-therapy-and-assistance-in-activities-of-daily-living.html (accessed on 20 November 2022).
- Williams, W. Tenoexo Hand Exoskeleton. Bionics For Everyone. 2022. Available online: https://bionicsforeveryone.com/tenoexo-hand-exoskeleton/ (accessed on 4 April 2023).
- Ben Abdallah, I.; Bouteraa, Y.; Rekik, C. Design and development of 3d printed myoelectric robotic exoskeleton for hand rehabilitation. Int. J. Smart Sens. Intell. Syst. 2017, 10, 1–26. [Google Scholar] [CrossRef]
- De Luca, C.J.; Gilmore, L.D.; Kuznetsov, M.; Roy, S.H. Filtering the surface EMG signal: Movement artifact and baseline noise contamination. J. Biomech. 2010, 43, 1573–1579. [Google Scholar] [CrossRef]
- Abdelhafiz, M.H.; Struijk, L.N.S.A.; Dosen, S.; Spaich, E.G. Biomimetic Tendon-Based Mechanism for Finger Flexion and Extension in a Soft Hand Exoskeleton: Design and Experimental Assessment. Sensors 2023, 23, 2272. [Google Scholar] [CrossRef]
- Rose, C.G.; O’Malley, M.K. Hybrid Rigid-Soft Hand Exoskeleton to Assist Functional Dexterity. IEEE Robot. Autom. Lett. 2018, 4, 73–80. [Google Scholar] [CrossRef]
- Chauhan, R.; Sebastian, B.; Ben-Tzvi, P. Grasp Prediction Toward Naturalistic Exoskeleton Glove Control. IEEE Trans. Human-Machine Syst. 2019, 50, 22–31. [Google Scholar] [CrossRef]
- Hust Dataset (March 2016). HandCorpus. (March 2016). Available online: https://www.handcorpus.org/?p=1596 (accessed on 4 April 2023).
- Maguire, G.; Chen, H.; Schnall, R.; Xu, W.; Huang, M.-C. Smoking Cessation System for Preemptive Smoking Detection. IEEE Internet Things J. 2021, 9, 3204–3214. [Google Scholar] [CrossRef]
- Zheng, Y. A Noble Classification Framework for Data Glove Classification of a Large Number of Hand Movements. J. Electr. Comput. Eng. 2021, 2021, 9472053. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparing actuation methods for exoskeletons. Adapted from [3].
Table 1.
Comparing actuation methods for exoskeletons. Adapted from [3].
| Pneumatic Actuators | Hydraulic Actuators | Electric Actuators | |||
|---|---|---|---|---|---|
| Pros | Cons | Pros | Cons | Pros | Cons |
| High Speed | Limited force output | High force output | Slow | High speed | Low force output |
| Economical | Short life cycle | High mobility | Expensive | Precise | Expensive |
| Simple design | Dependable | Leakage concern | Complicated design | ||
Table 2.
Comparing EMG and EEG used as biosignal methods for assistive hand exoskeletons [8].
Table 2.
Comparing EMG and EEG used as biosignal methods for assistive hand exoskeletons [8].
| EMG | EEG | ||
|---|---|---|---|
| Pros | Cons | Pros | Cons |
| Able to directly read the muscle output | Prone to physical and electrical noise from other muscle groups firing | Able to read the electrical activity directly from the central nervous system | Prone to noise from many conditions (physical, interference, etc.) |
| Must be placed accurately on the muscle to read correctly | Highly complex | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Hays, E.; Slayton, J.; Tejeda-Godinez, G.; Carney, E.; Cruz, K.; Exley, T.; Jafari, A. A Review of Rehabilitative and Assistive Technologies for Upper-Body Exoskeletal Devices. Actuators 2023, 12, 178. https://doi.org/10.3390/act12040178
AMA Style
Hays E, Slayton J, Tejeda-Godinez G, Carney E, Cruz K, Exley T, Jafari A. A Review of Rehabilitative and Assistive Technologies for Upper-Body Exoskeletal Devices. Actuators. 2023; 12(4):178. https://doi.org/10.3390/act12040178
Chicago/Turabian StyleHays, Emilly, Jack Slayton, Gary Tejeda-Godinez, Emily Carney, Kobe Cruz, Trevor Exley, and Amir Jafari. 2023. "A Review of Rehabilitative and Assistive Technologies for Upper-Body Exoskeletal Devices" Actuators 12, no. 4: 178. https://doi.org/10.3390/act12040178
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.