


Novel Extension Control Instrument for Power Wheelchair Based on Kalman Filter Head Motion Detection

Abstract
:1. Introduction
2. Design of System or System Overview
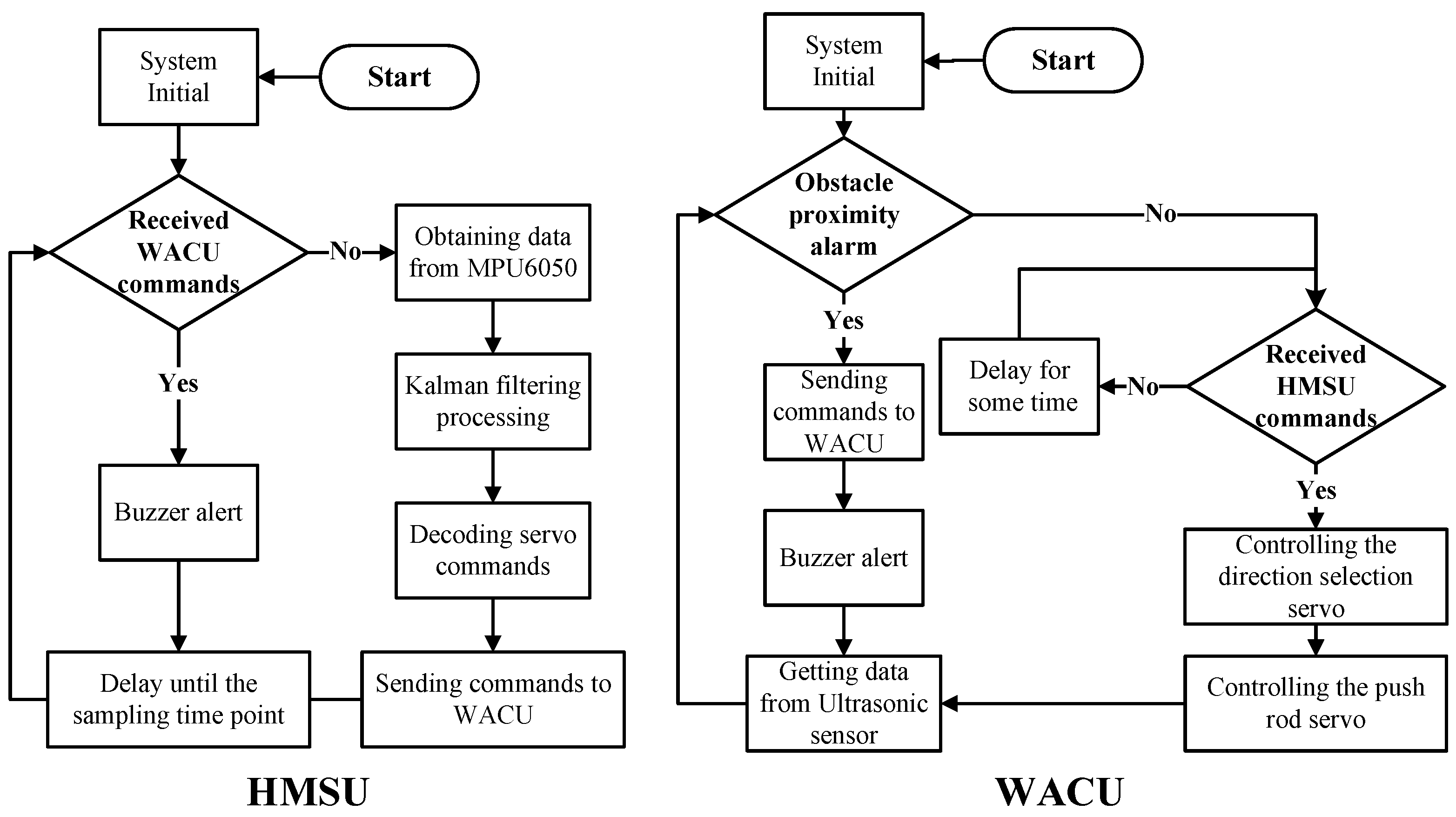
2.1. Principle of System
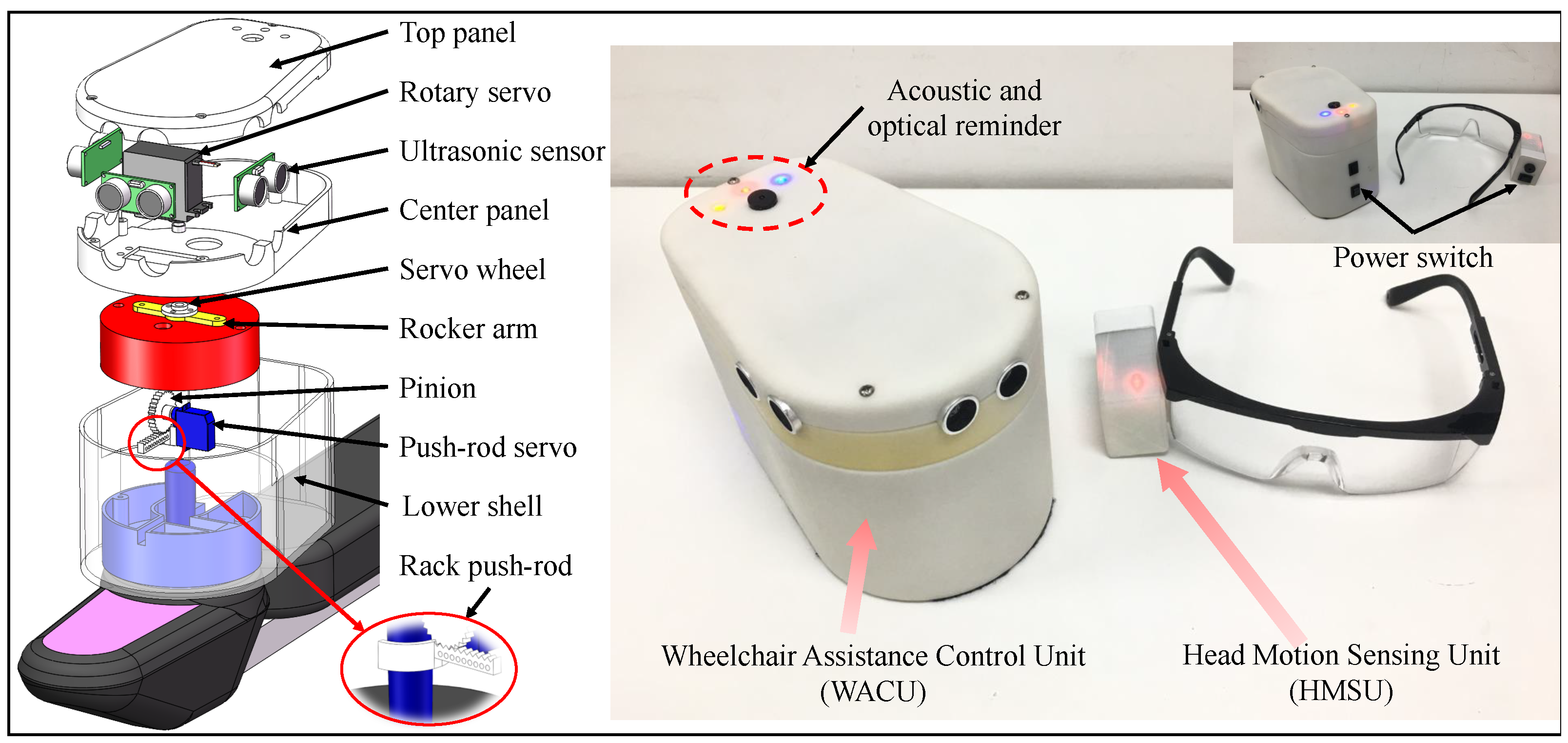
2.2. Mechanical Design
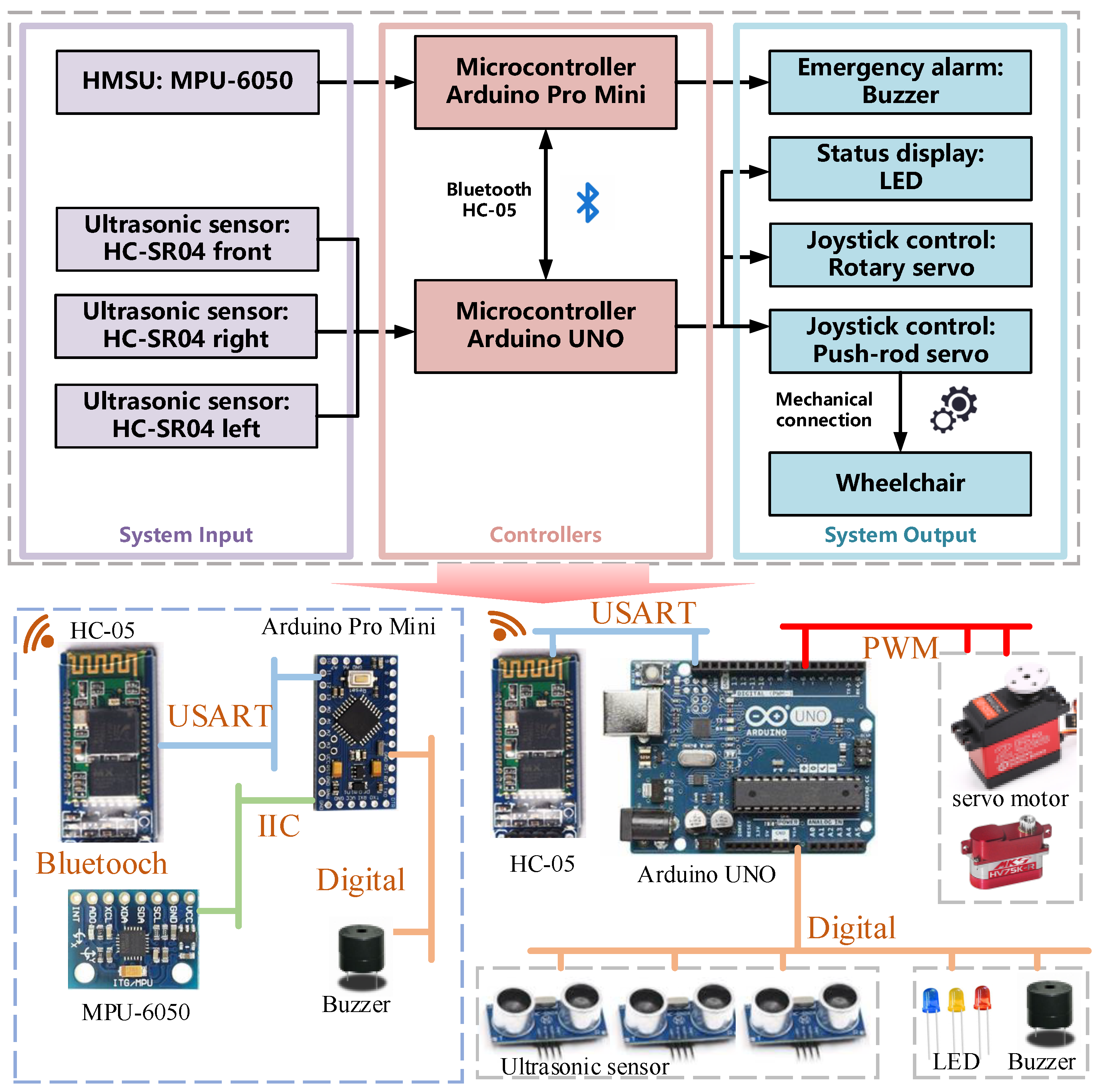
2.3. Hardware of Control System
3. Modeling and Sensing of Head Motion Posture
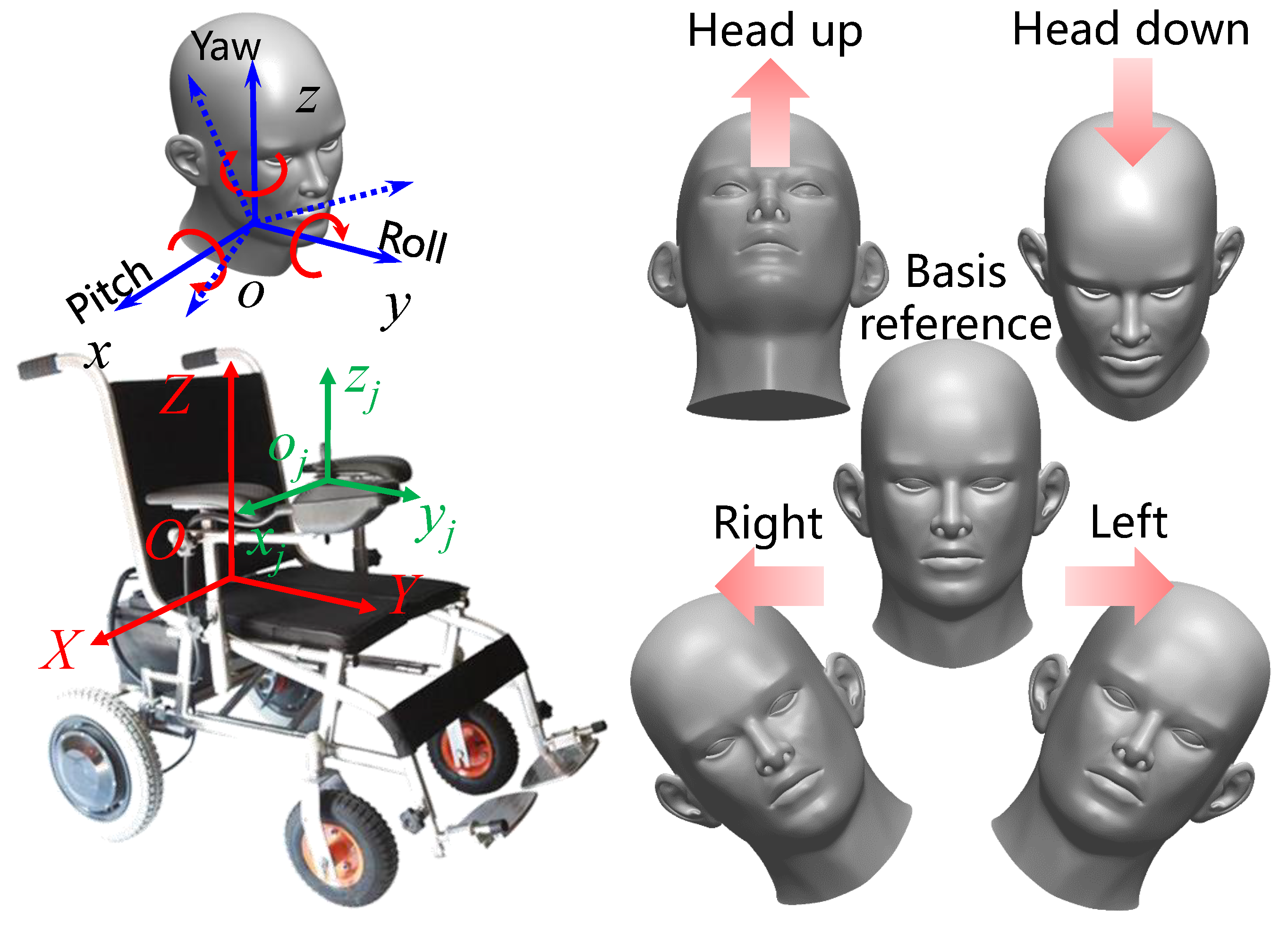
3.1. Head Kinematics
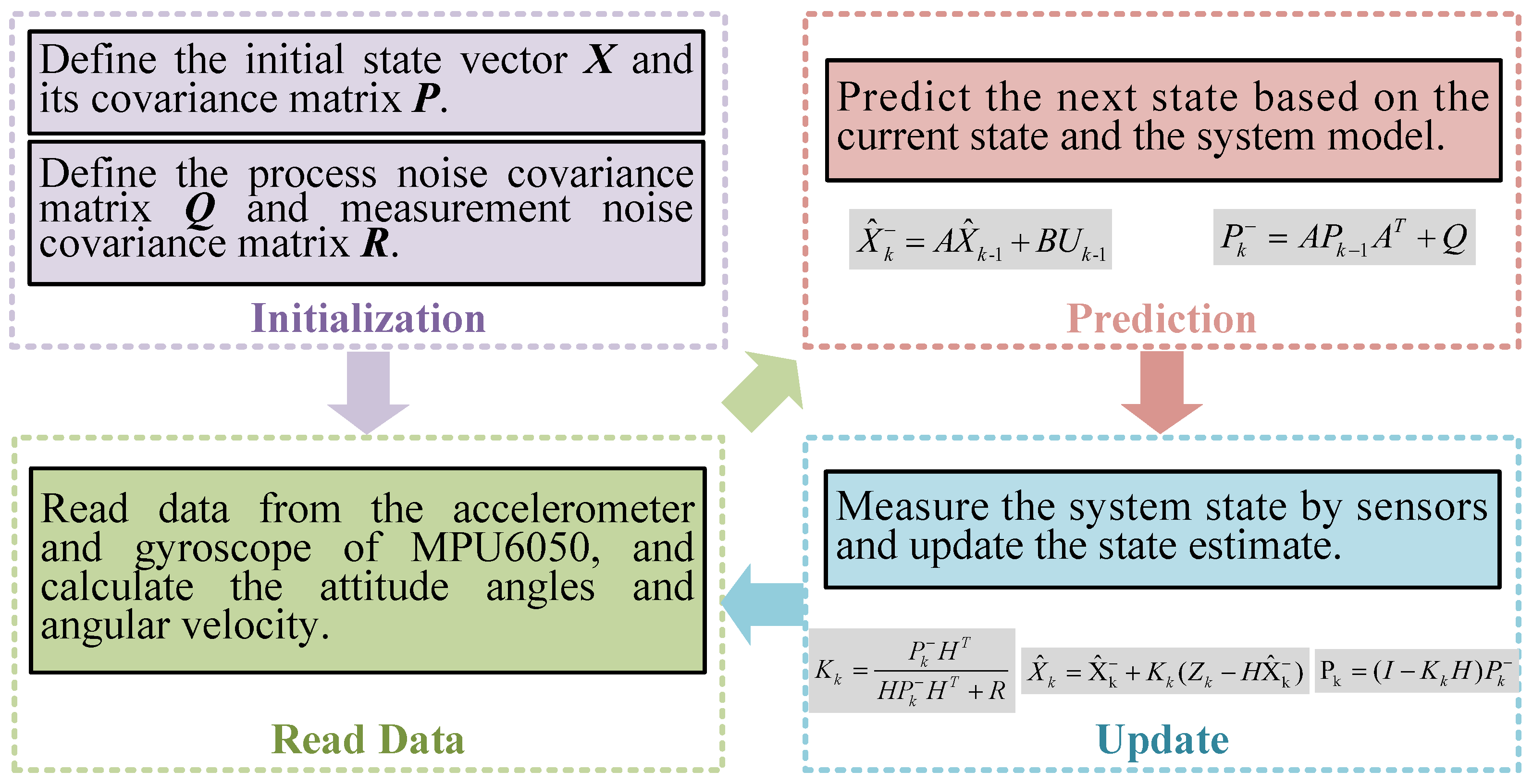
3.2. Kalman Filtering for Motion Sensing
3.3. The Maneuvering Strategy of the Wheelchair
4. Experiments and Results
4.1. Experiment Settings
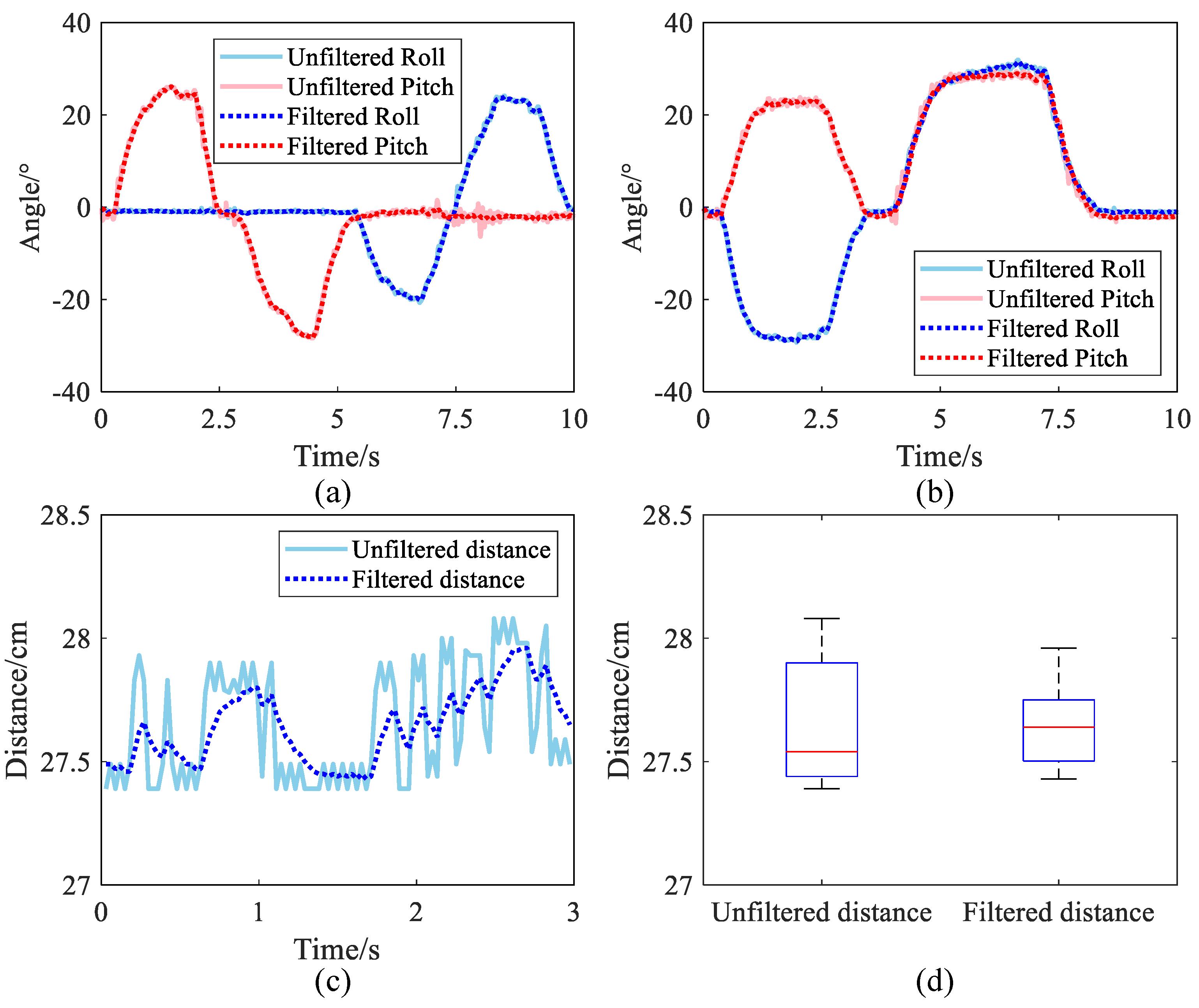
4.2. Analysis of Kalman Filtering Results
4.3. Analysis of Head Posture Detection
4.4. Prototyping Testing
5. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization; United Nations Children’s Fund. Global Report on Assistive Technology; World Health Organization: Geneva, Switzerland, 2022. [Google Scholar]
- Wieczorek, B.; Kukla, M. Biomechanical Relationships Between Manual Wheelchair Steering and the Position of the Human Body’s Center of Gravity. J. Biomech. Eng. 2020, 142, 081006. [Google Scholar] [CrossRef] [PubMed]
- Kader, M.A.; Alam, M.E.; Jahan, N.; Bhuiyan, M.A.B.; Alam, M.S.; Sultana, Z. Design and implementation of a head motion-controlled semi-autonomous wheelchair for quadriplegic patients based on 3-axis accelerometer. In Proceedings of the 2019 22nd International Conference on Computer and Information Technology (ICCIT), Dhaka, Bangladesh, 18–20 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Xiong, M.; Hotter, R.; Nadin, D.; Patel, J.; Tartakovsky, S.; Wang, Y.; Patel, H.; Axon, C.; Bosiljevac, H.; Brandenberger, A.; et al. A low-cost, semi-autonomous wheelchair controlled by motor imagery and jaw muscle activation. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 2180–2185. [Google Scholar]
- Subramanian, M.; Songur, N.; Adjei, D.; Orlov, P.; Faisal, A.A. A. Eye Drive: Gaze-based semi-autonomous wheelchair interface. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 5967–5970. [Google Scholar]
- Simpson, R.C.; Levine, S.P. Voice control of a powered wheelchair. IEEE Trans. Neural Syst. Rehabil. Eng. 2002, 10, 122–125. [Google Scholar] [CrossRef] [PubMed]
- Lu, T. A motion control method of intelligent wheelchair based on hand gesture recognition. In Proceedings of the 2013 IEEE 8th Conference on Industrial Electronics and Applications (ICIEA), Melbourne, Australia, 19–21 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 957–962. [Google Scholar]
- Kundu, A.S.; Mazumder, O.; Lenka, P.K.; Bhaumik, S. Hand gesture recognition based omnidirectional wheelchair control using IMU and EMG sensors. J. Intell. Robot. Syst. 2018, 91, 529–541. [Google Scholar] [CrossRef]
- Wanluk, N.; Visitsattapongse, S.; Juhong, A.; Pintavirooj, C. Smart wheelchair based on eye tracking. In Proceedings of the 2016 9th Biomedical Engineering International Conference (BMEiCON), Laung Prabang, Laos, 7–9 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–4. [Google Scholar]
- Zgallai, W.; Brown, J.T.; Ibrahim, A.; Mahmood, F.; Mohammad, K.; Khalfan, M.; Mohammed, M.; Salem, M.; Hamood, N. Deep learning AI application to an EEG driven BCI smart wheelchair. In Proceedings of the 2019 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 26 March–10 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Mirza, I.A.; Tripathy, A.; Chopra, S.; D’Sa, M.; Rajagopalan, K.; D’Souza, A.; Sharma, N. Mind-controlled wheelchair using an EEG headset and arduino microcontroller. In Proceedings of the 2015 International Conference on Technologies for Sustainable Development (ICTSD), Mumbai, India, 4–6 February 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Kupetz, D.; Wentzell, S.; BuSha, B. Head motion controlled power wheelchair. In Proceedings of the 2010 IEEE 36th Annual Northeast Bioengineering Conference (nebec), New York, NY, USA, 26–28 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–2. [Google Scholar]
- Iskanderani, A.I.; Tamim, F.R.; Rana, M.M.; Ahmed, W.; Mehedi, I.M.; Aljohani, A.J.; Latif, A.; Shaikh, S.A.L.; Shorfuzzaman, M.; Akther, F.; et al. Voice Controlled Artificial Intelligent Smart Wheelchair. In Proceedings of the 2020 8th International Conference on Intelligent and Advanced Systems (ICIAS), Kuching, Malaysia, 13–15 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Kutbi, M.; Du, X.; Chang, Y.; Sun, B.; Agadakos, N.; Li, H.; Hua, G.; Mordohai, P. Usability studies of an egocentric vision-based robotic wheelchair. ACM Trans. Hum.-Robot. Interact. (THRI) 2020, 10, 1–23. [Google Scholar] [CrossRef]
- Azraai, M.M.; Yahaya, S.Z.; Chong, I.A.; Soh, Z.C.; Hussain, Z.; Boudville, R. Head gestures based movement control of electric wheelchair for people with tetraplegia. In Proceedings of the 2022 IEEE 12th International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 21–22 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 163–167. [Google Scholar]
- Gonzalez-Cely, A.X.; Blanco-Diaz, C.F.; Diaz, C.A.; Bastos-Filho, T.F. Roborueda: Python-based GUI to control a wheelchair and monitor user posture. SoftwareX 2023, 24, 101555. [Google Scholar] [CrossRef]
- Sebkhi, N.; Bhavsar, A.; Sahadat, N.; Baldwin, J.; Walling, E.; Biniker, A.; Hoefnagel, M.; Tonuzi, G.; Osborne, R.; Anderson, D.V.; et al. Evaluation of a head-tongue controller for power wheelchair driving by people with quadriplegia. IEEE Trans. Biomed. Eng. 2021, 69, 1302–1309. [Google Scholar] [CrossRef] [PubMed]
- Ziying, Y.; Hong, G.; Wenhao, J. Design and implementation of a MEMS-based attitude angle measuring system for moving objects. In Proceedings of the 2021 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 29–31 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 145–149. [Google Scholar]
- Gui, P.; Tang, L.; Mukhopadhyay, S. MEMS based IMU for tilting measurement: Comparison of complementary and kalman filter based data fusion. In Proceedings of the 2015 IEEE 10th conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2004–2009. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 1995. [Google Scholar]
- Chui, C.K.; Chen, G. Kalman Filtering; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Mass of WACU | About 760 g |
| Mass of HMSU | 84.2 g (with glasses) |
| Size of WACU | 174 × 110 × 120 mm |
| Size of HMSU | 64 × 28 × 37 mm |
| Endurance time | About 5 h |
| Response speed | <1 s |
| Applicable model | Power wheelchairs controlled by hand |
| Angle accuracy | About 1° |
| Parameter | Value |
|---|---|
| Length × width × height | 95 × 56 × 90 cm |
| Maximum rate | 6 km/h |
| Rated endurance | 25 km |
| Vehicle weight | 13.8 kg |
| Parameter | Forward | Back | Left | Right |
|---|---|---|---|---|
| Test times | 50 | 50 | 50 | 50 |
| Recognition times | 50 | 50 | 48 | 52 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Ying, Z.; Tian, X.; Jin, S.; Huang, J.; Miao, Y. Novel Extension Control Instrument for Power Wheelchair Based on Kalman Filter Head Motion Detection. Actuators 2024, 13, 141. https://doi.org/10.3390/act13040141
Zhang Y, Ying Z, Tian X, Jin S, Huang J, Miao Y. Novel Extension Control Instrument for Power Wheelchair Based on Kalman Filter Head Motion Detection. Actuators. 2024; 13(4):141. https://doi.org/10.3390/act13040141
Chicago/Turabian StyleZhang, Yixin, Zhuohang Ying, Xinyu Tian, Siyuan Jin, Junjie Huang, and Yinan Miao. 2024. "Novel Extension Control Instrument for Power Wheelchair Based on Kalman Filter Head Motion Detection" Actuators 13, no. 4: 141. https://doi.org/10.3390/act13040141