The Proposal of Magnetic Suspension using Laterally Control Flux-Path Mechanism

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Principles
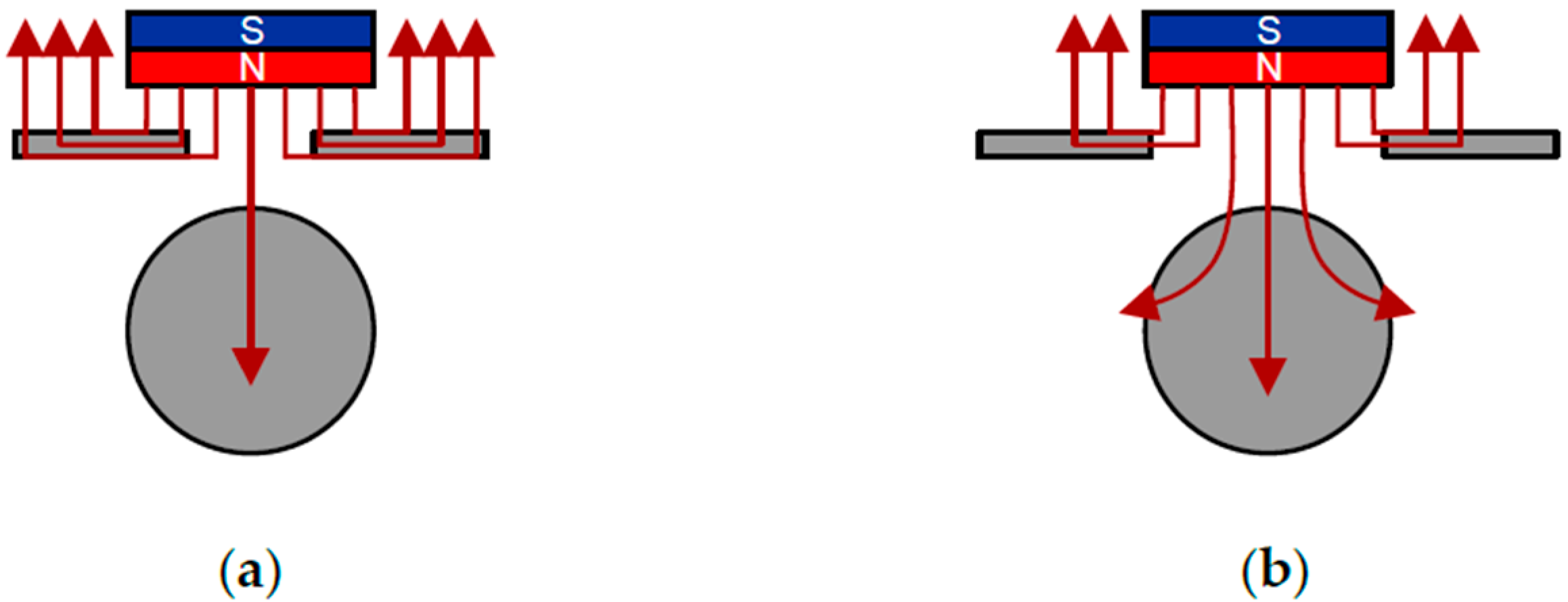
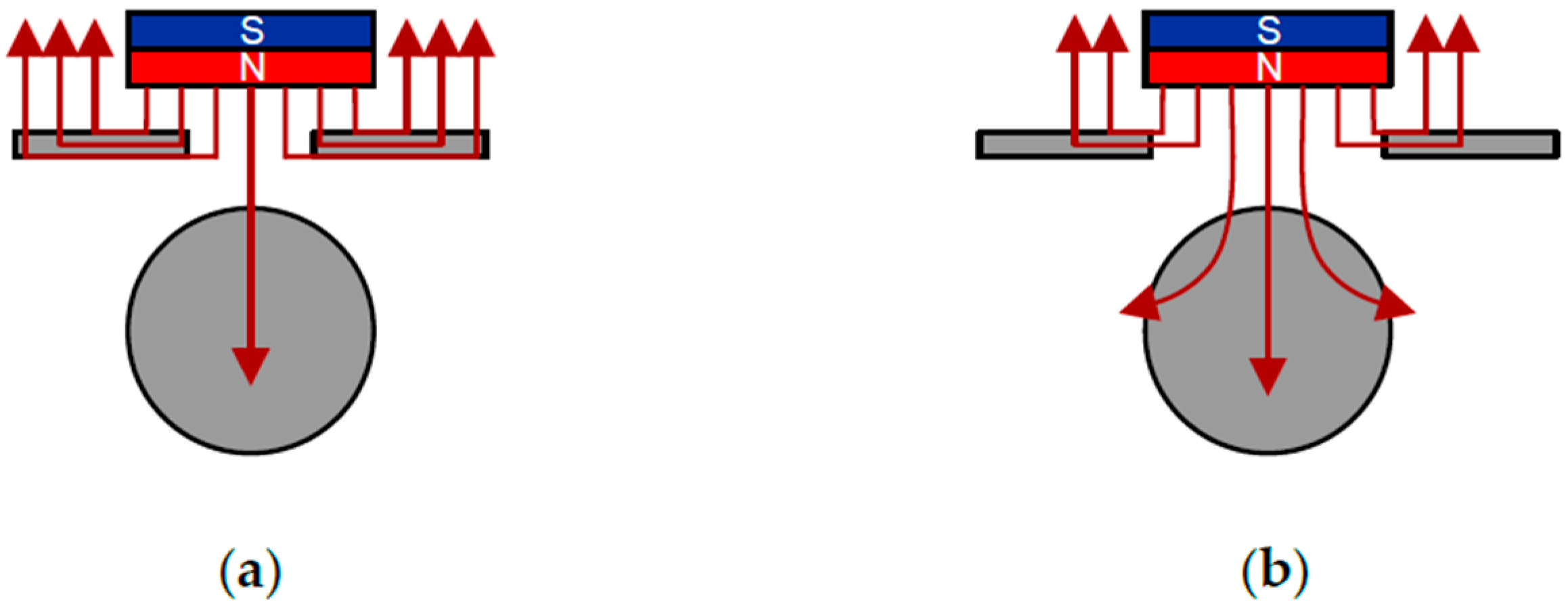
2.1. The Flux-Interrupted Type
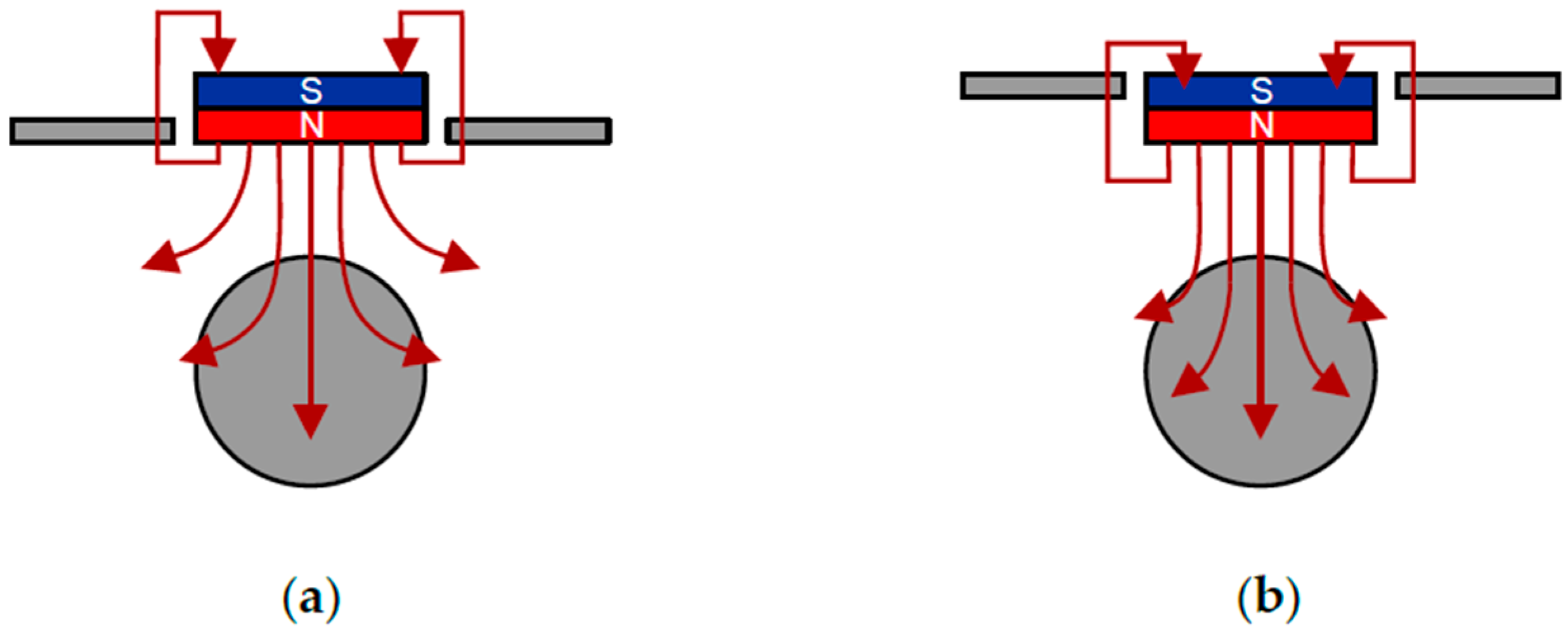
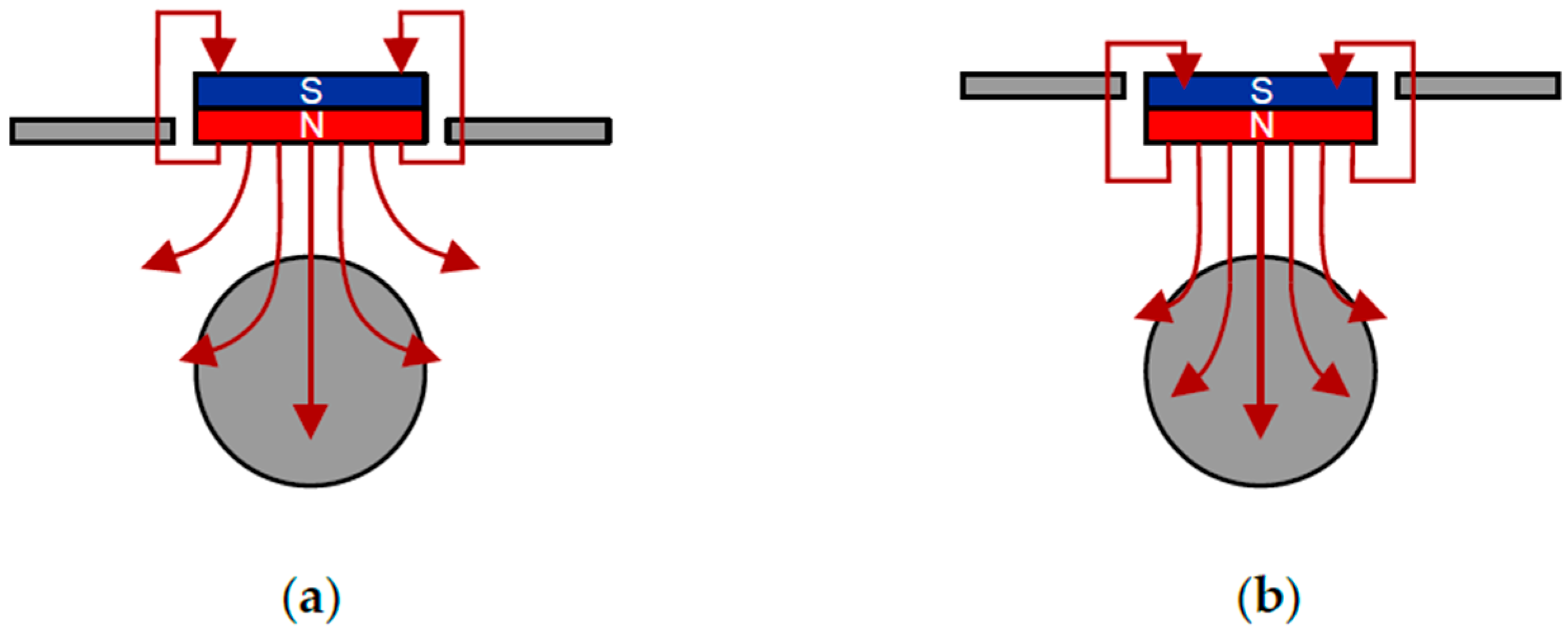
2.2. The Laterally Controlled Type
3. Magnetic Field Analysis
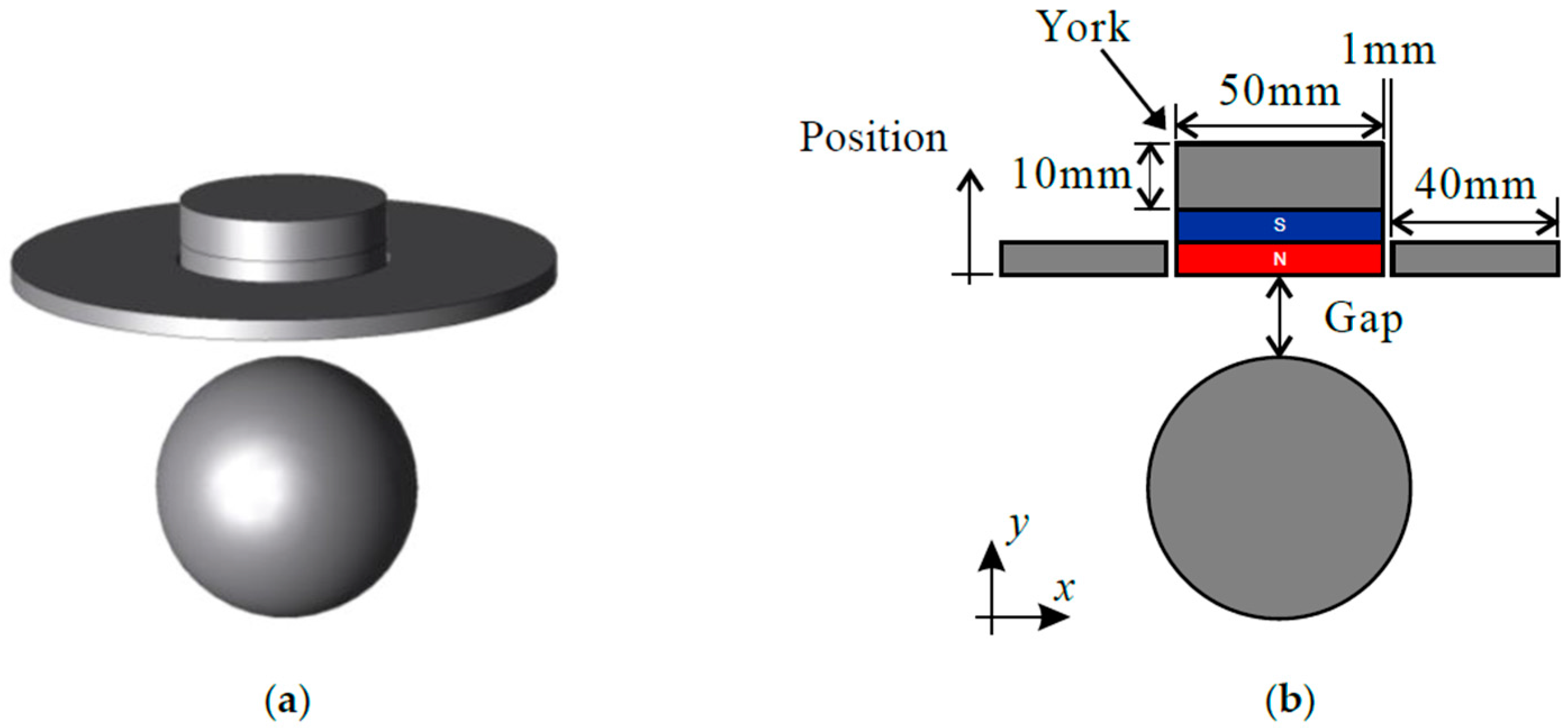
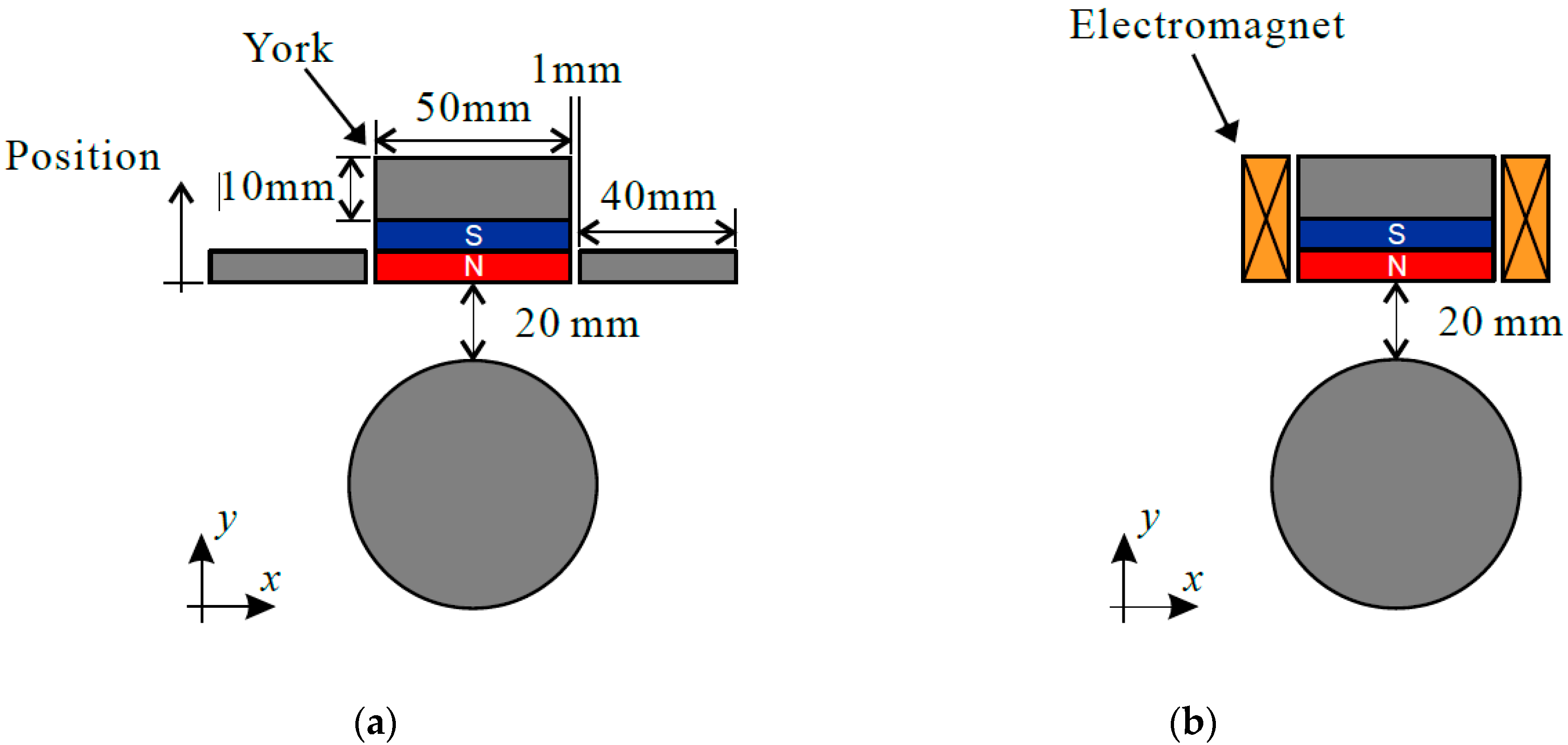
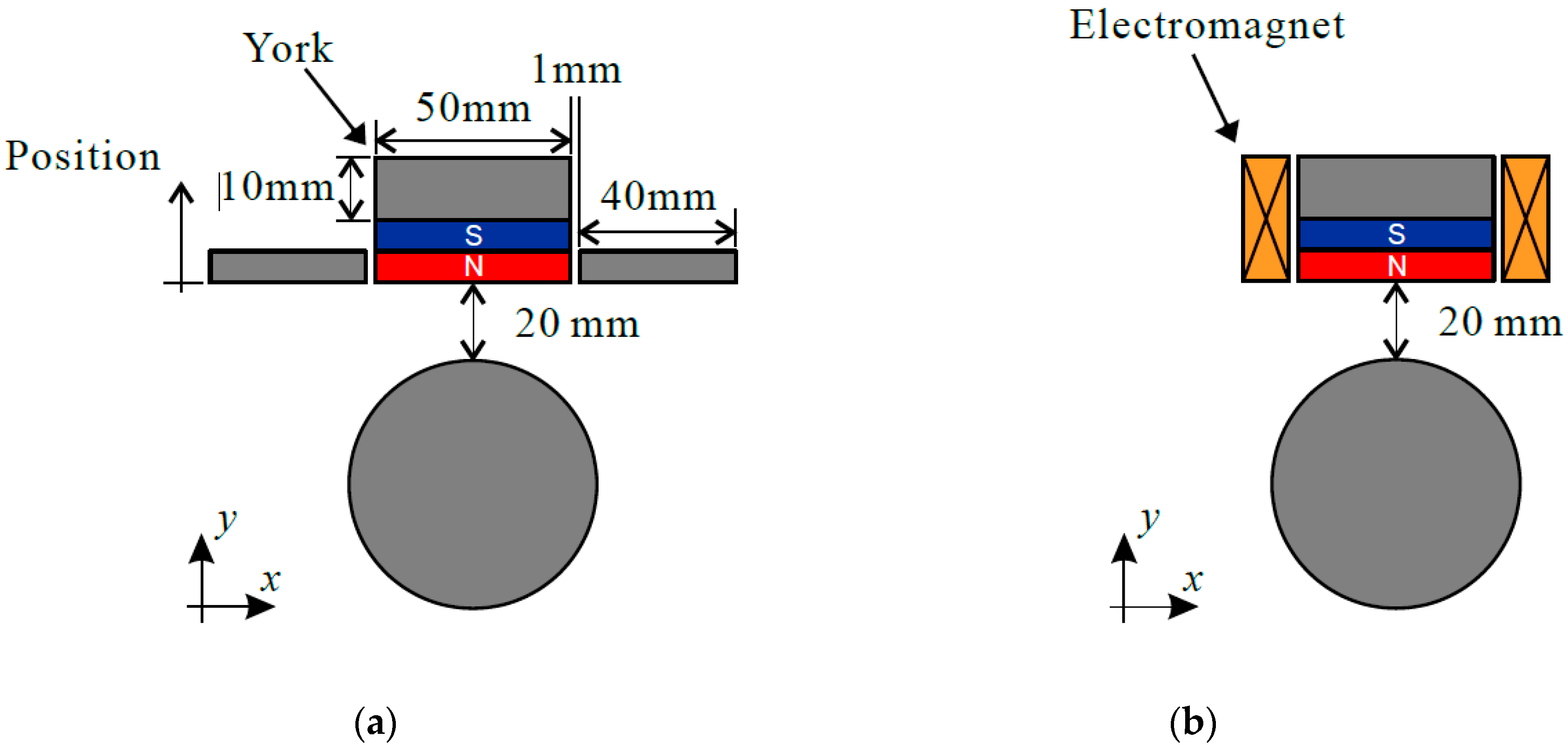
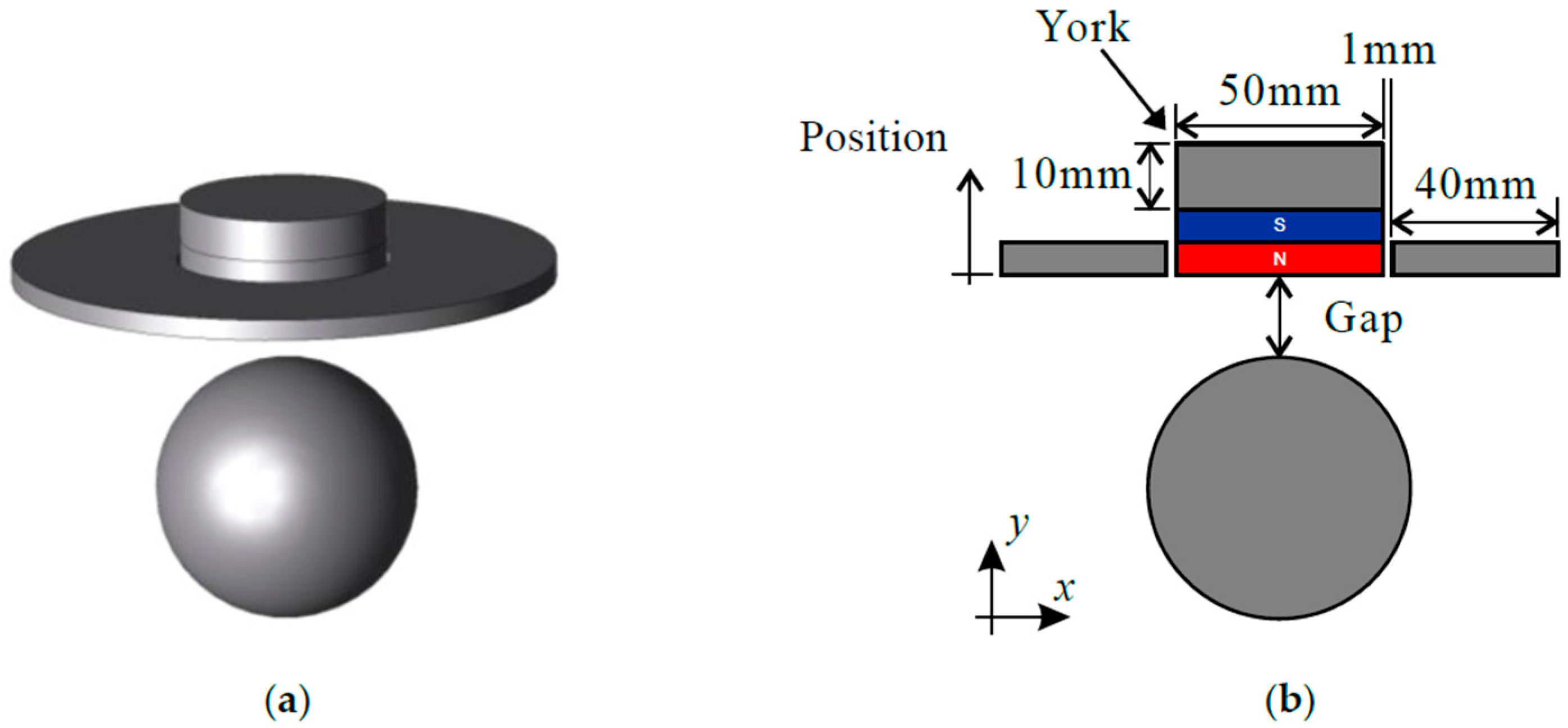
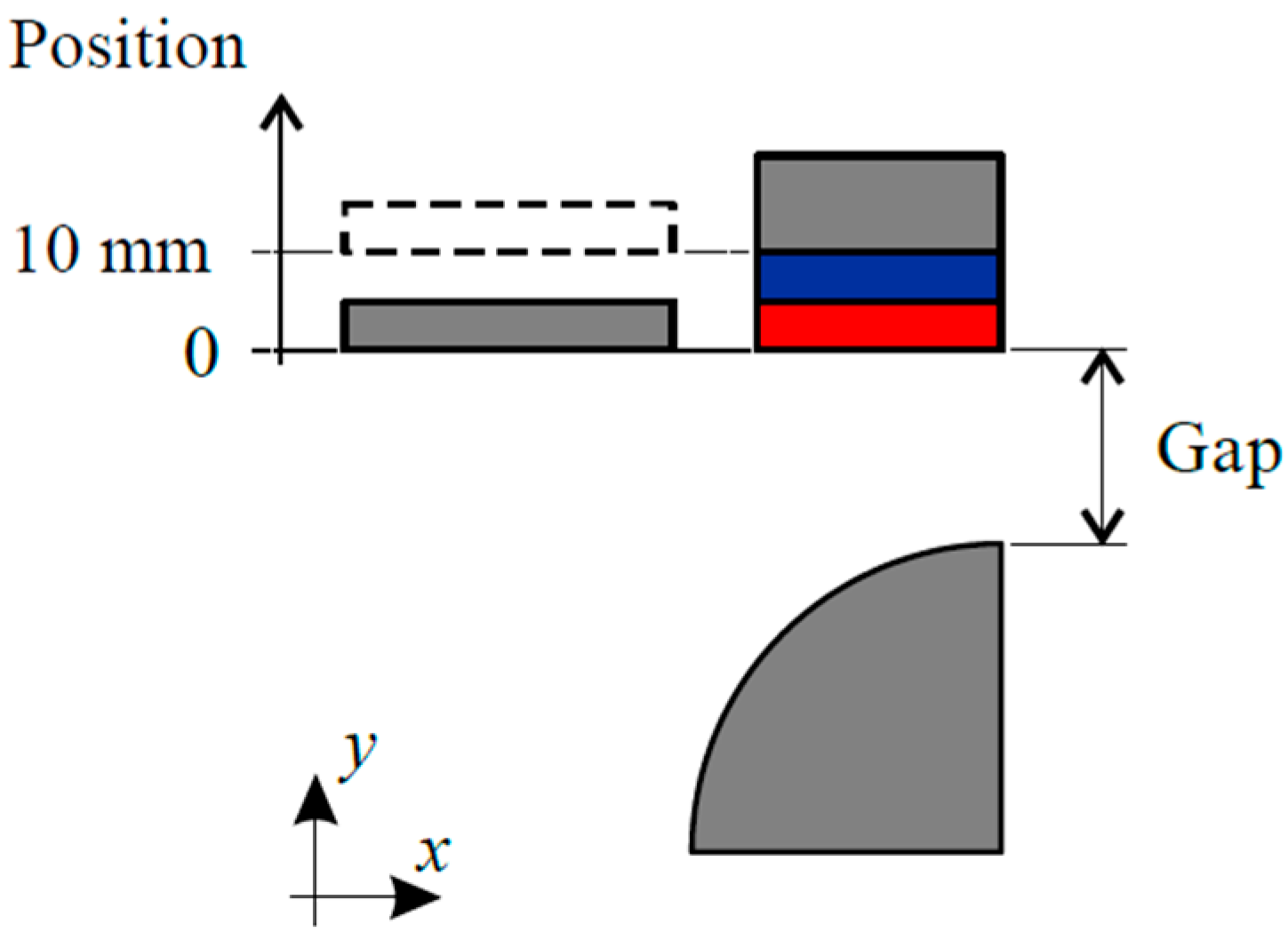
3.1. Analytical Model
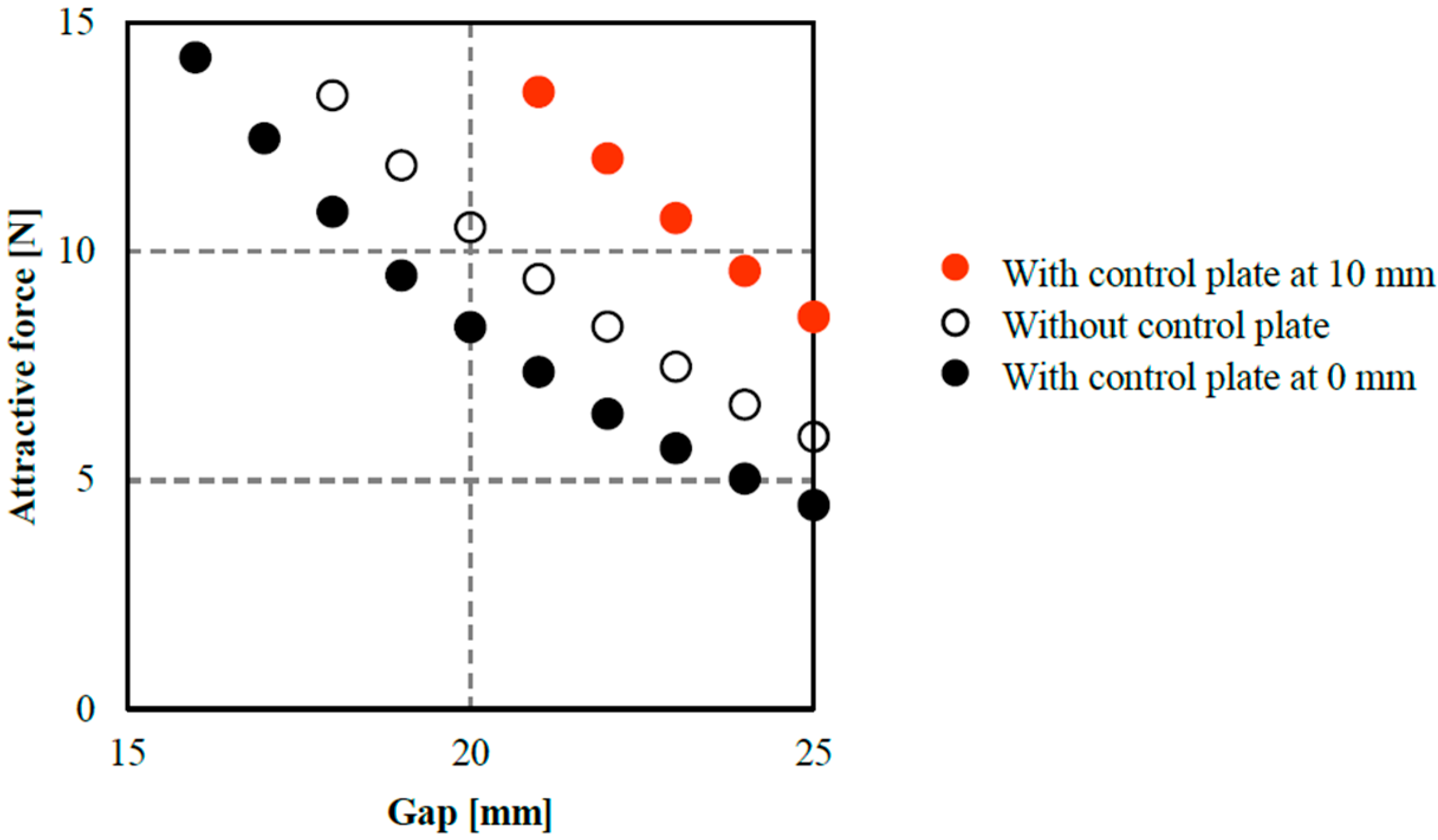
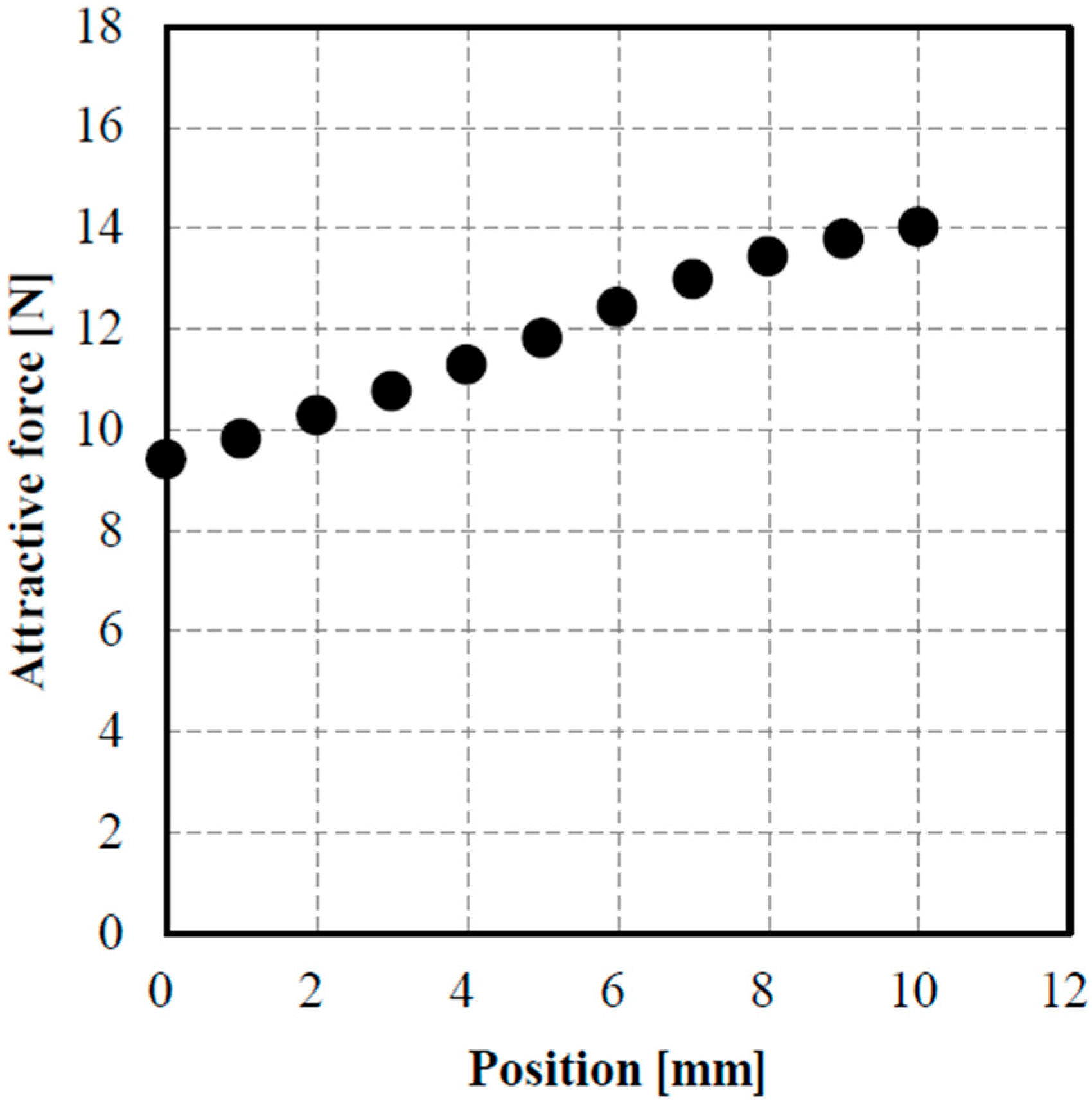
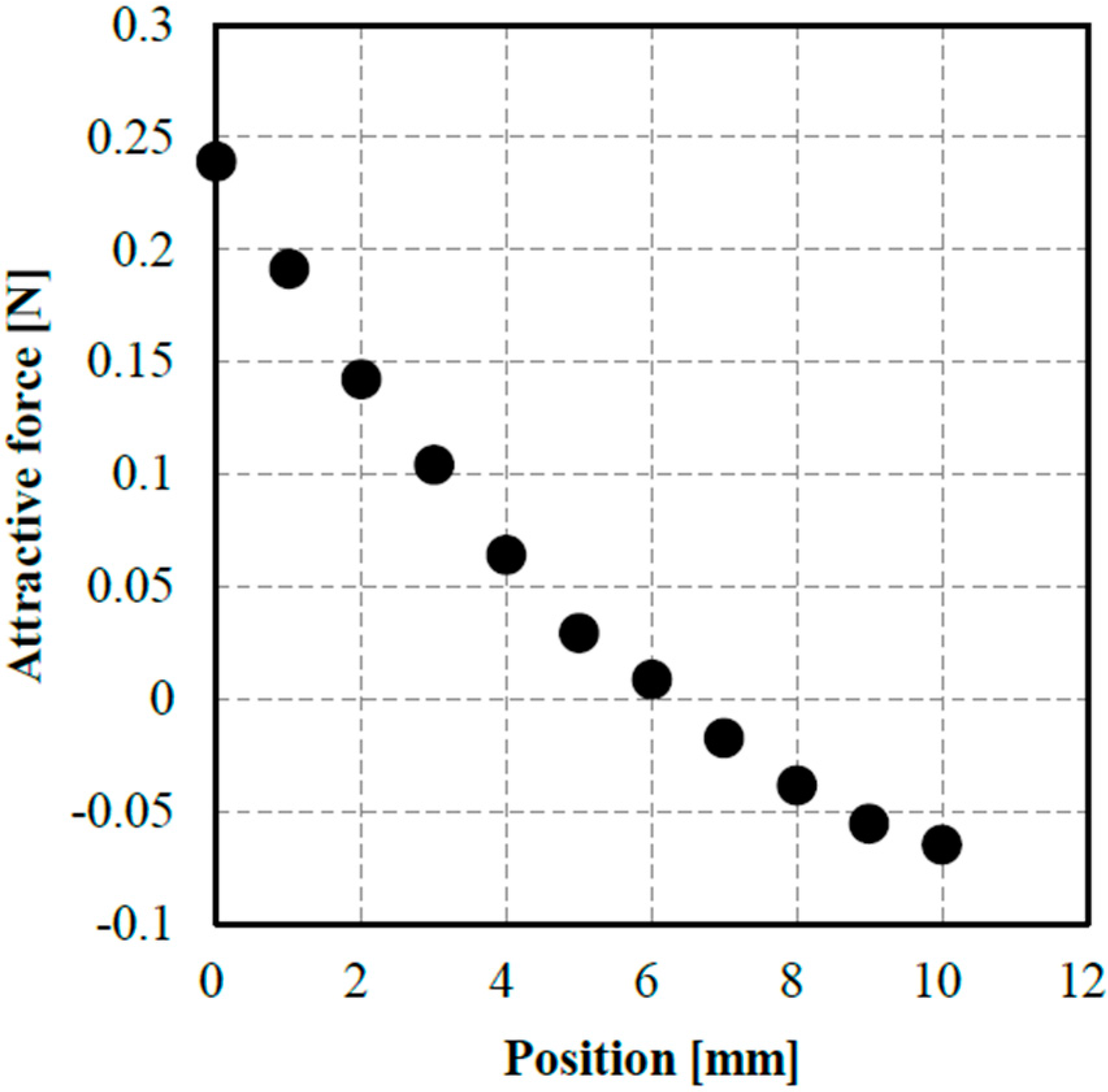
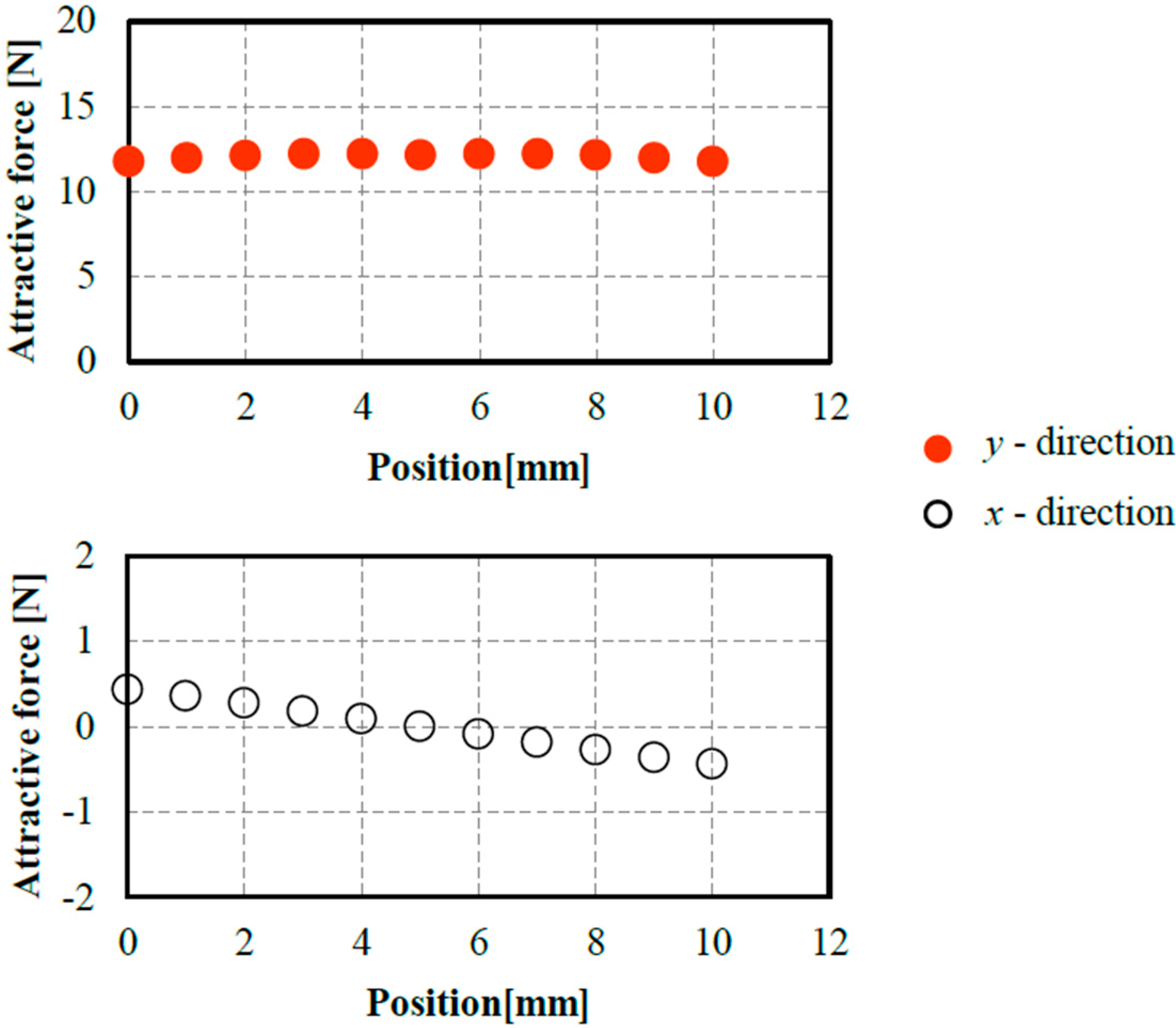
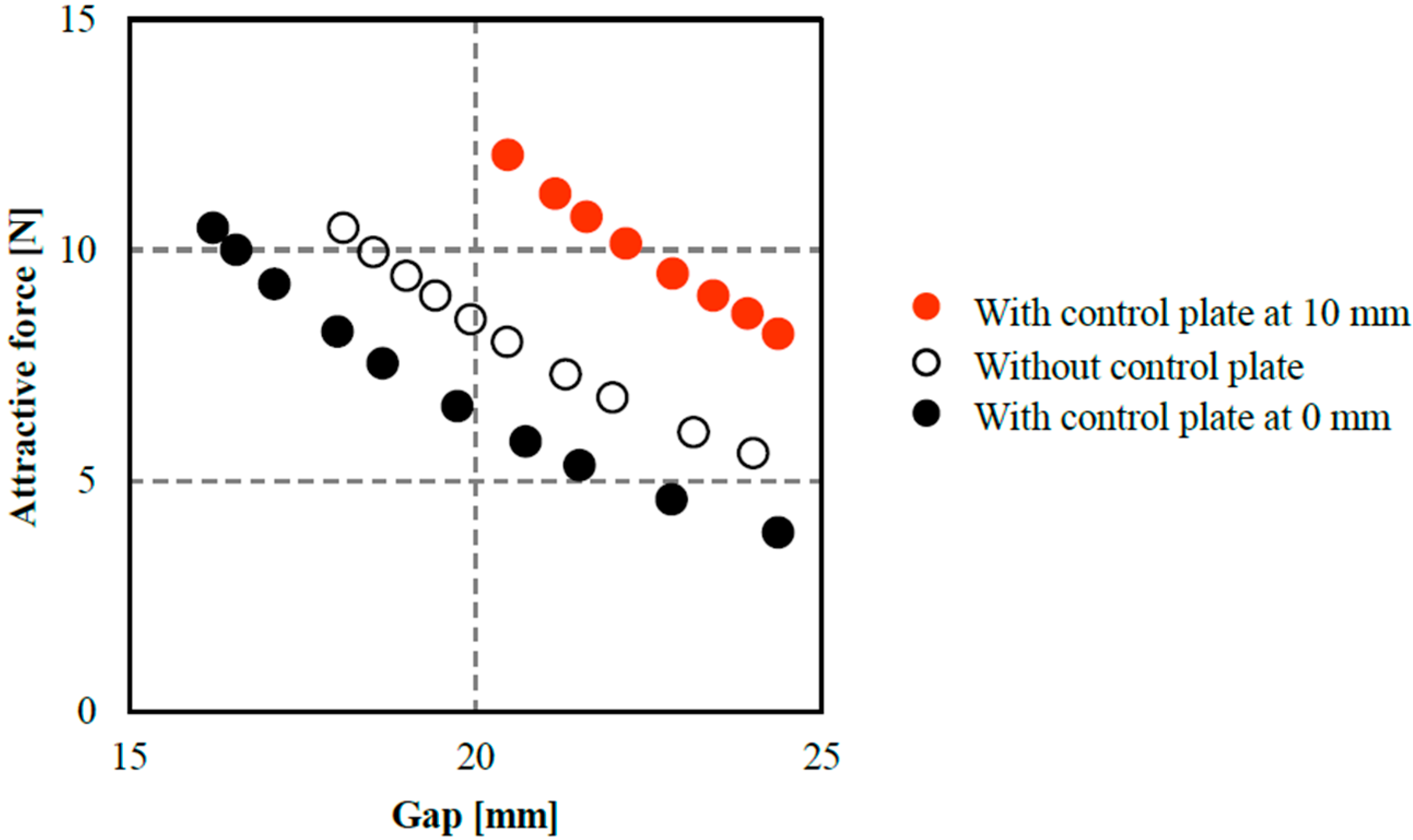
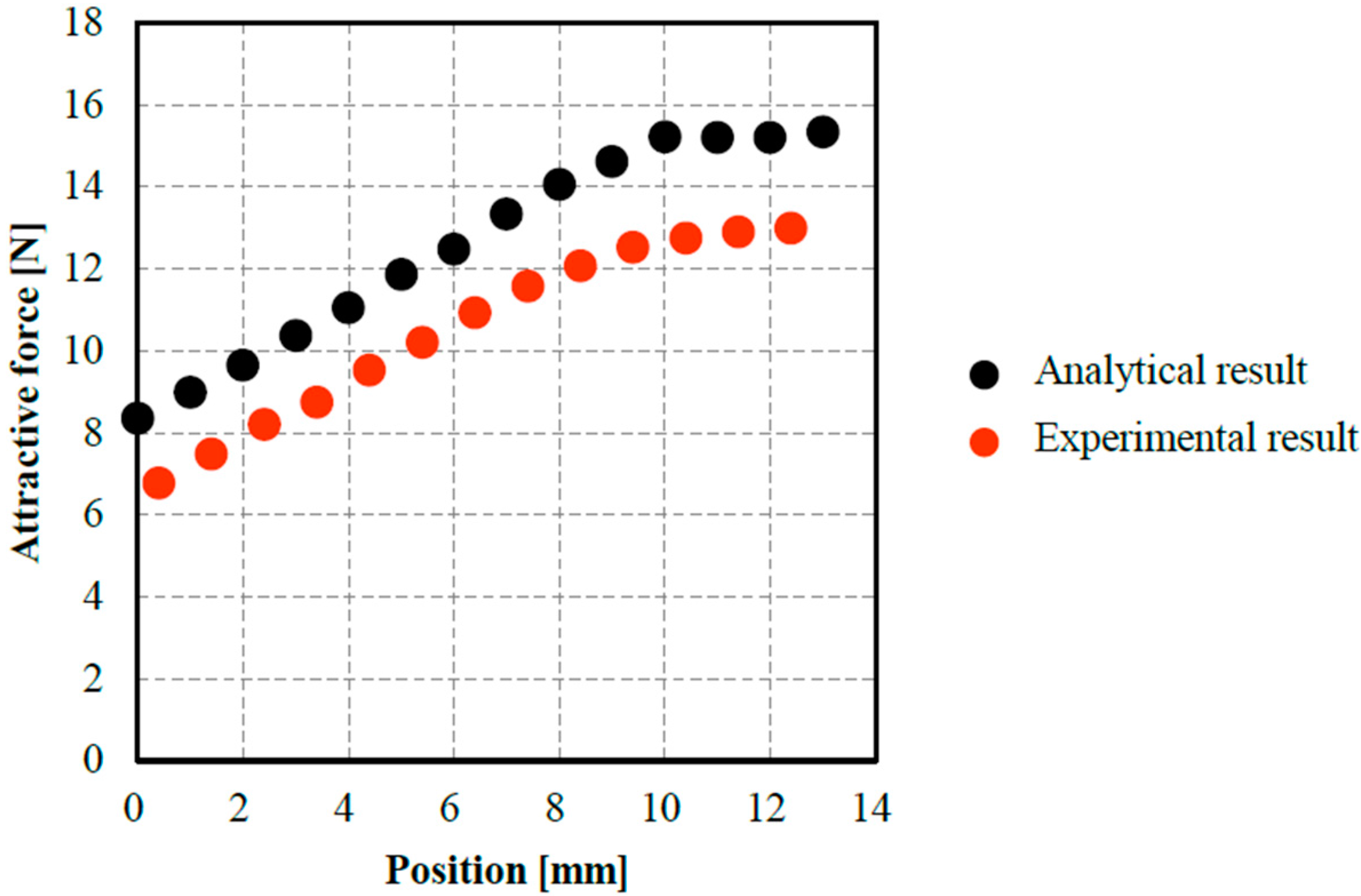
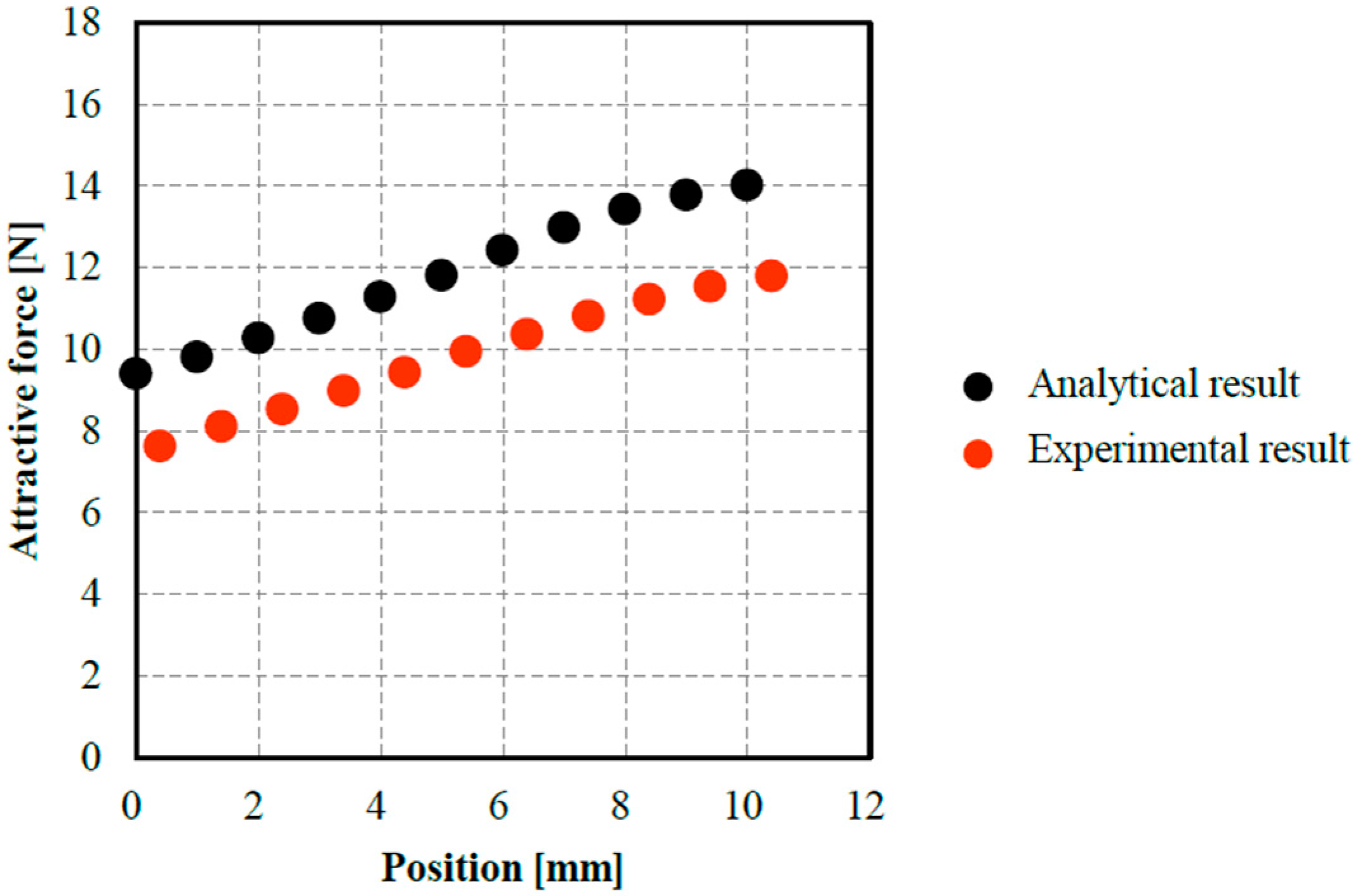
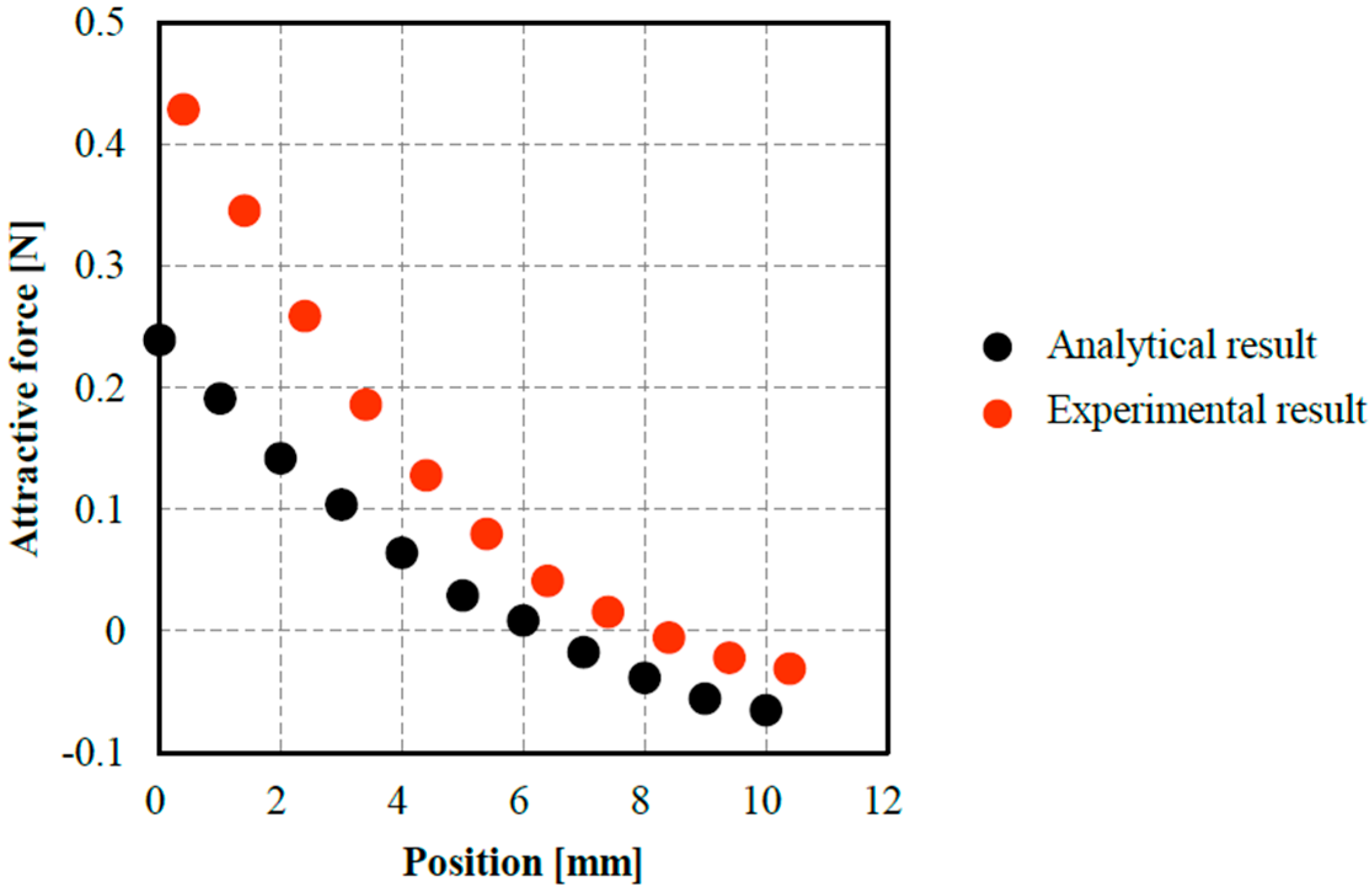
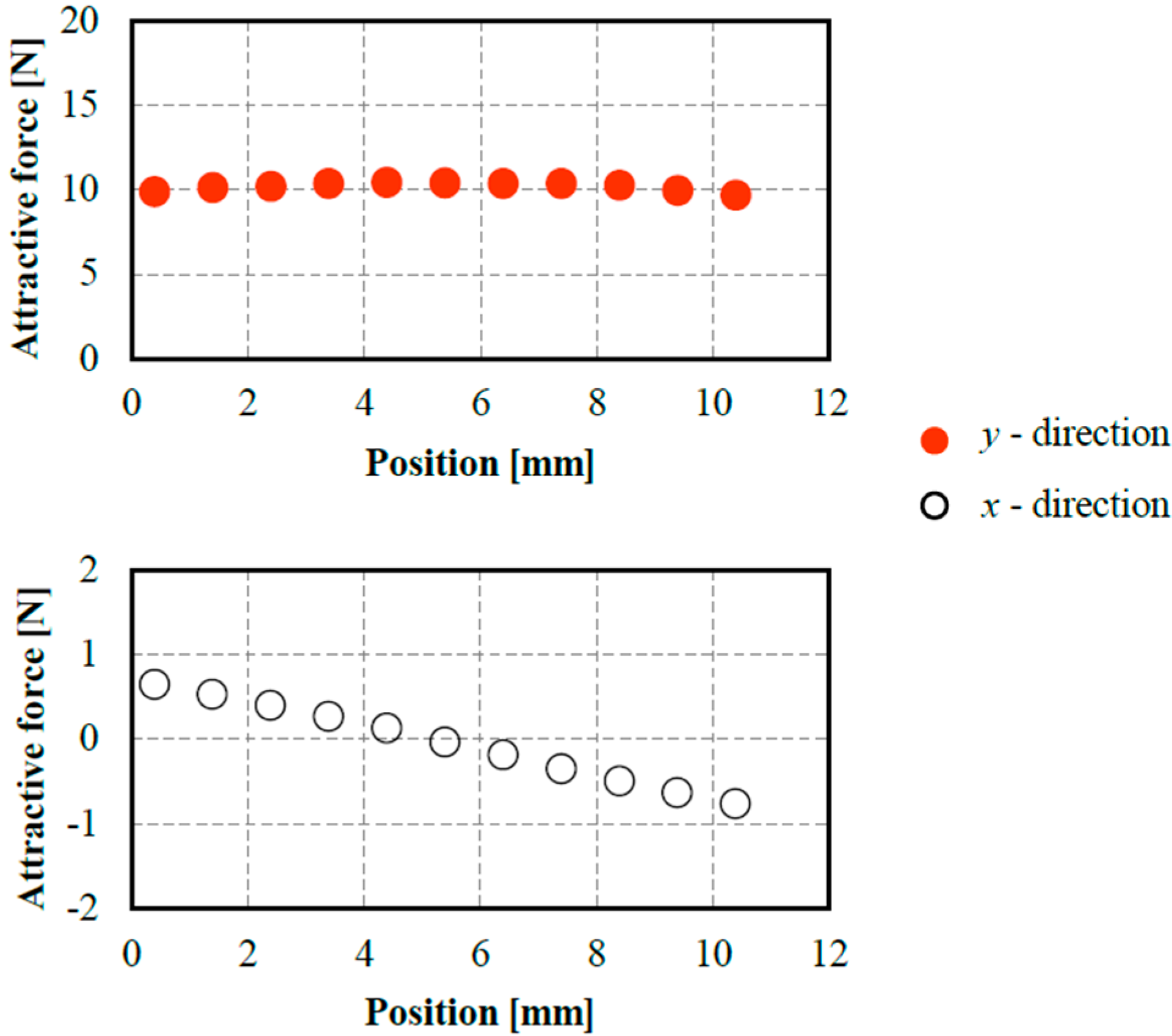
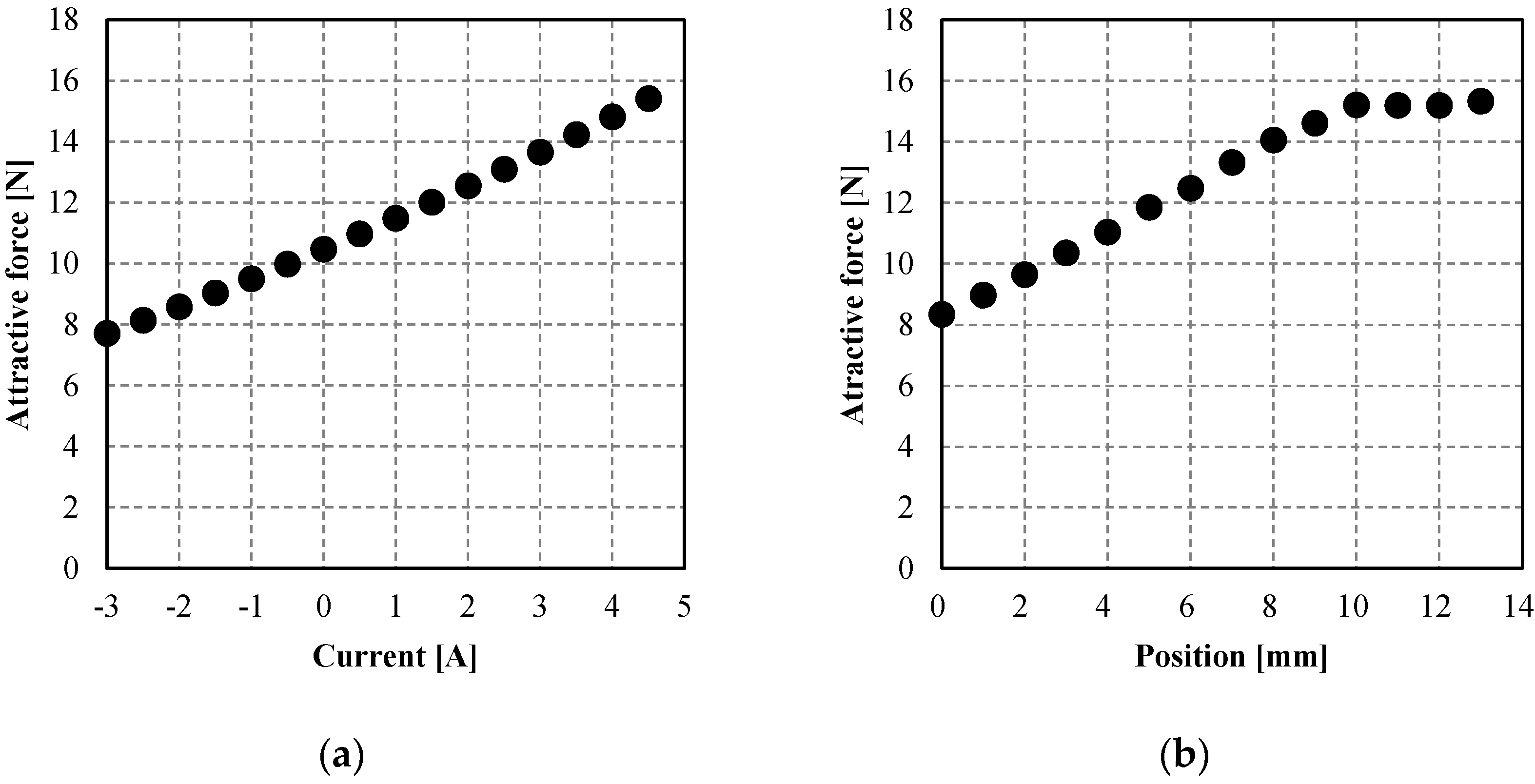
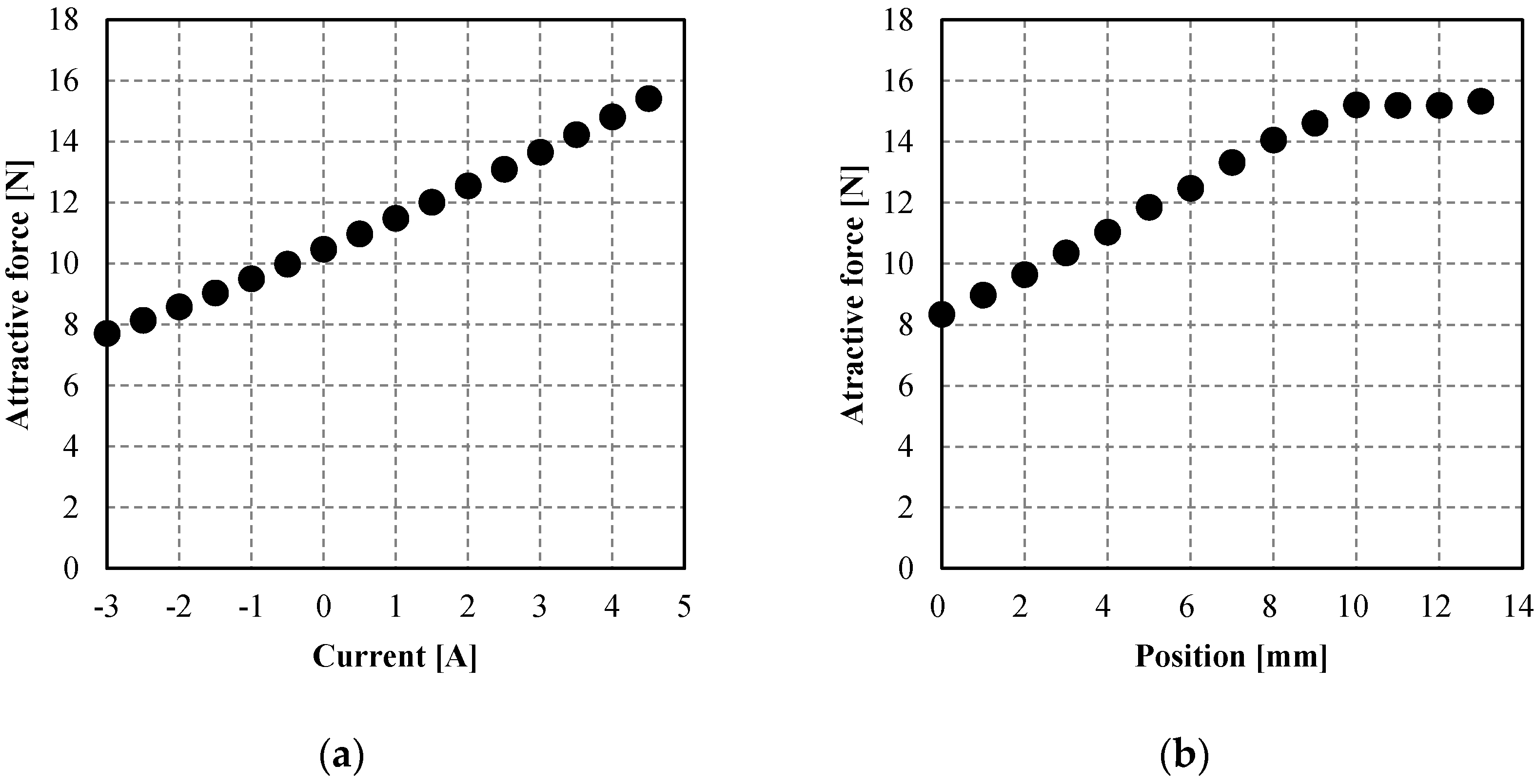
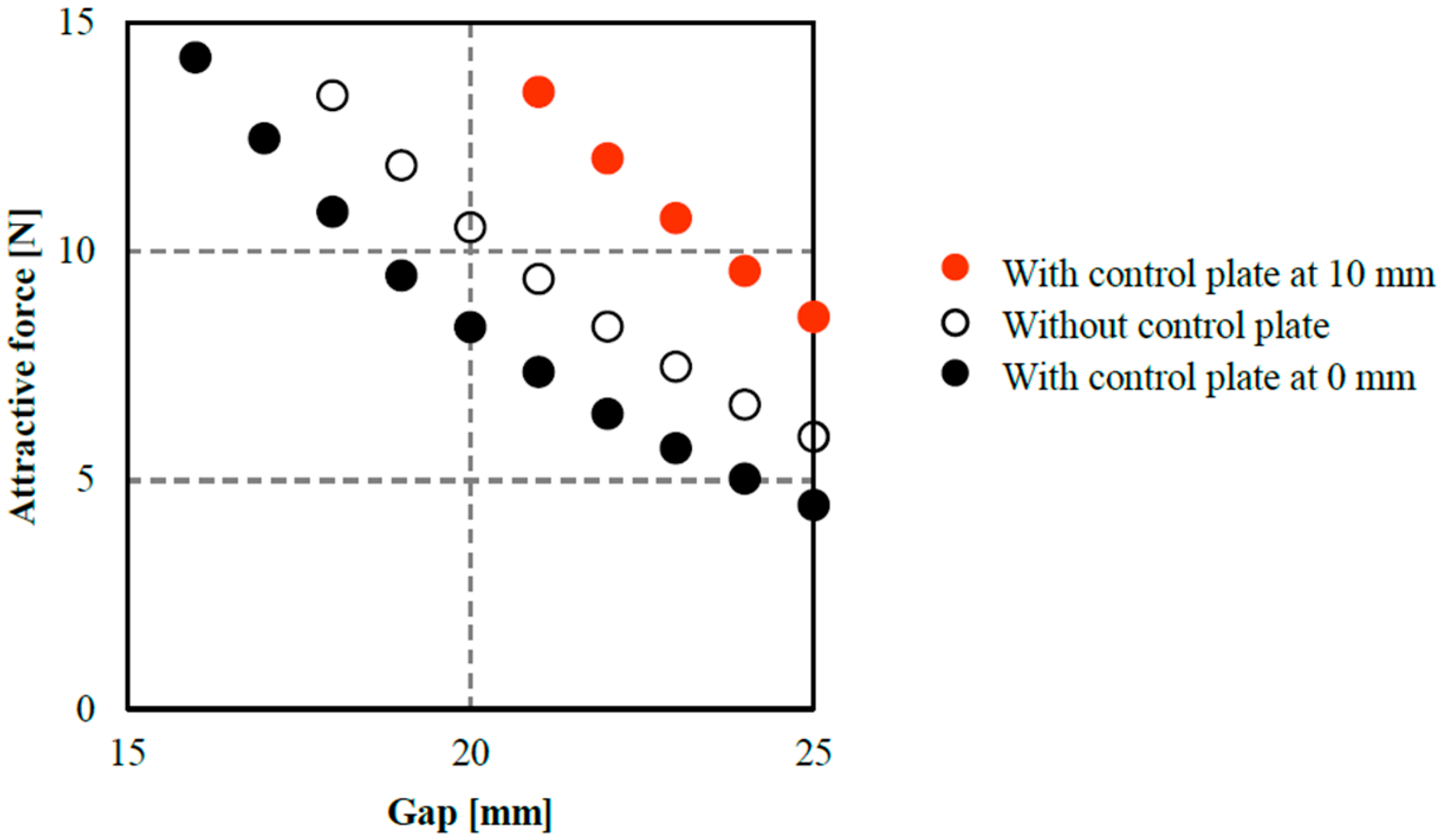
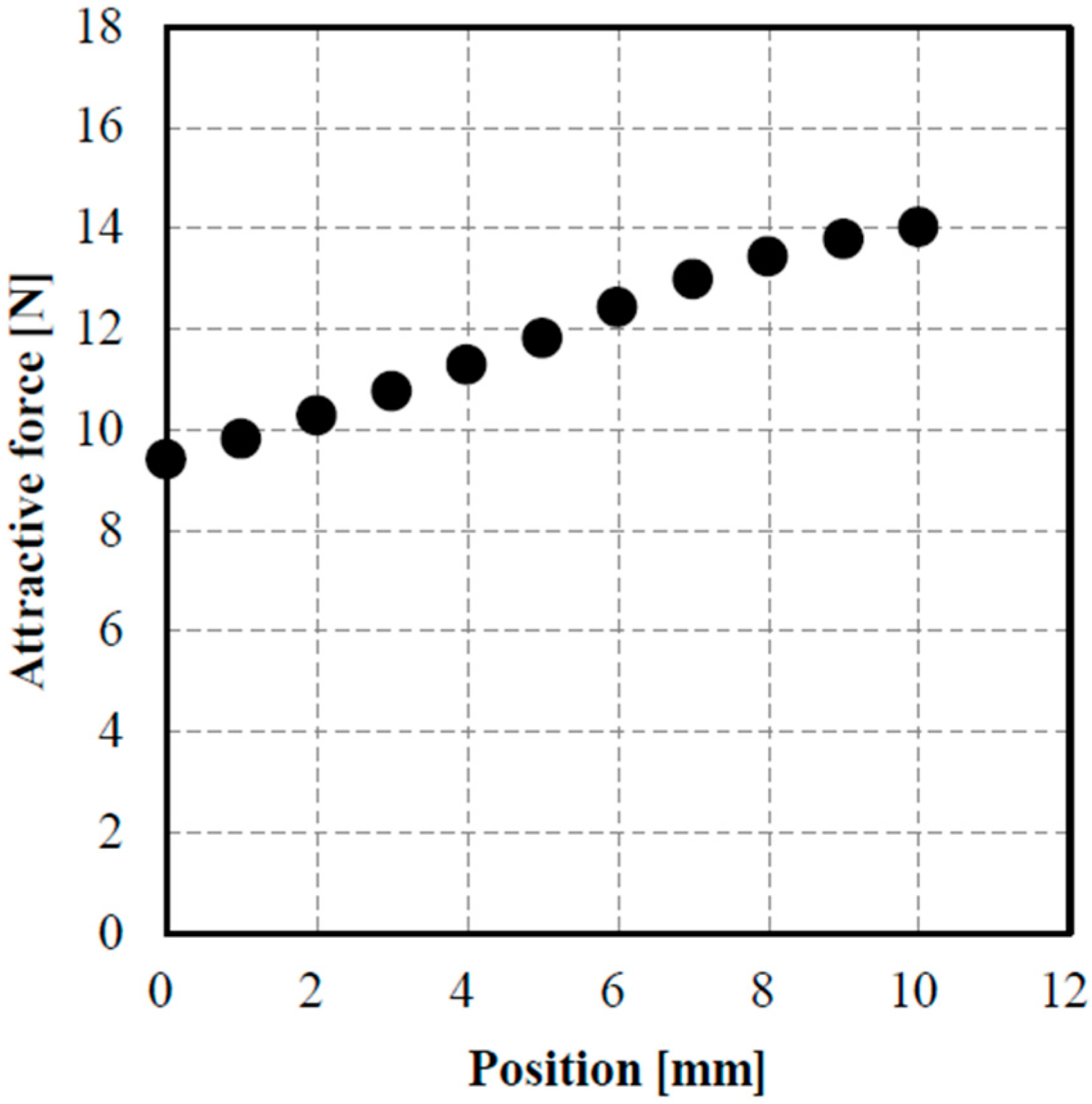
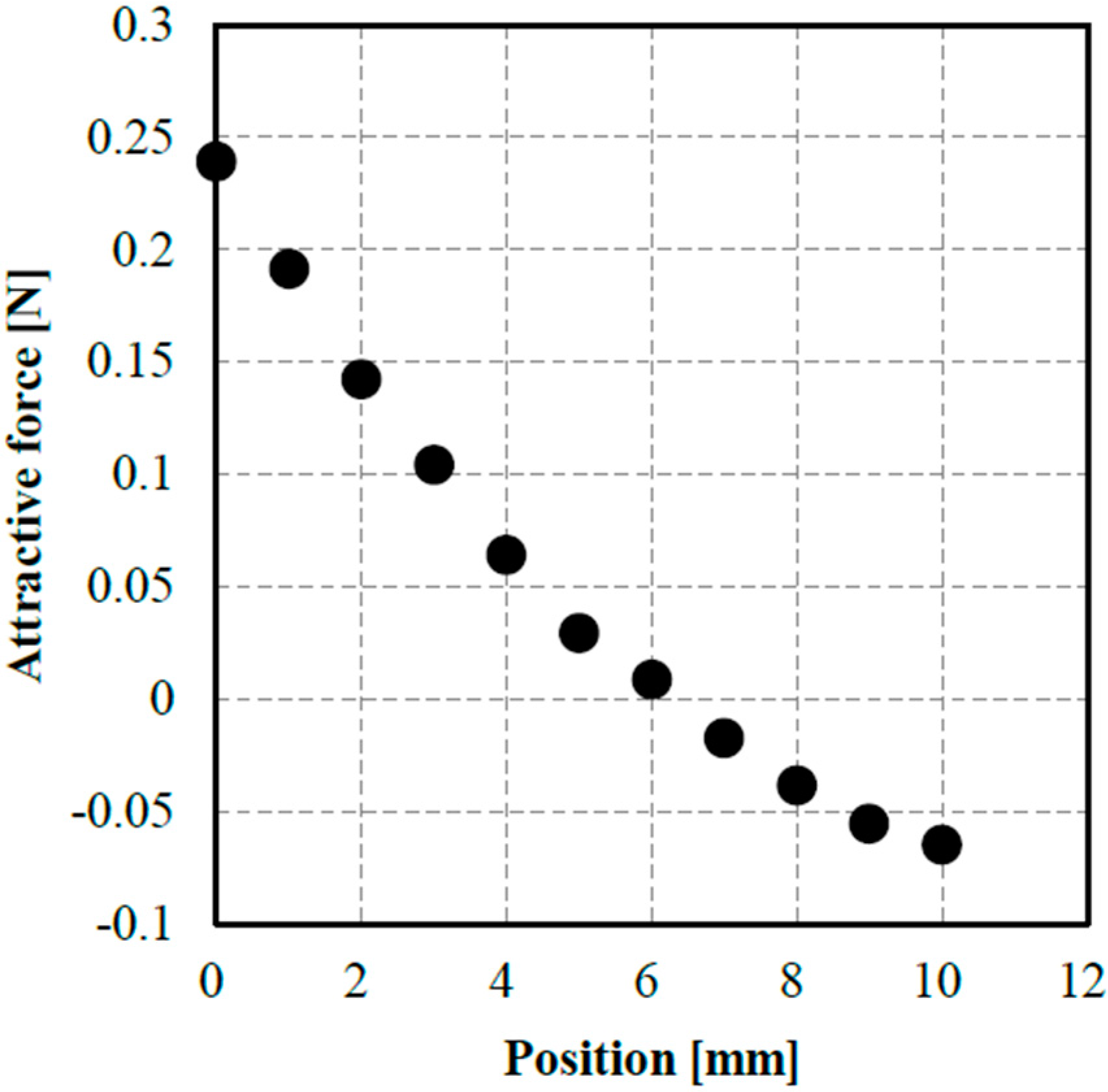
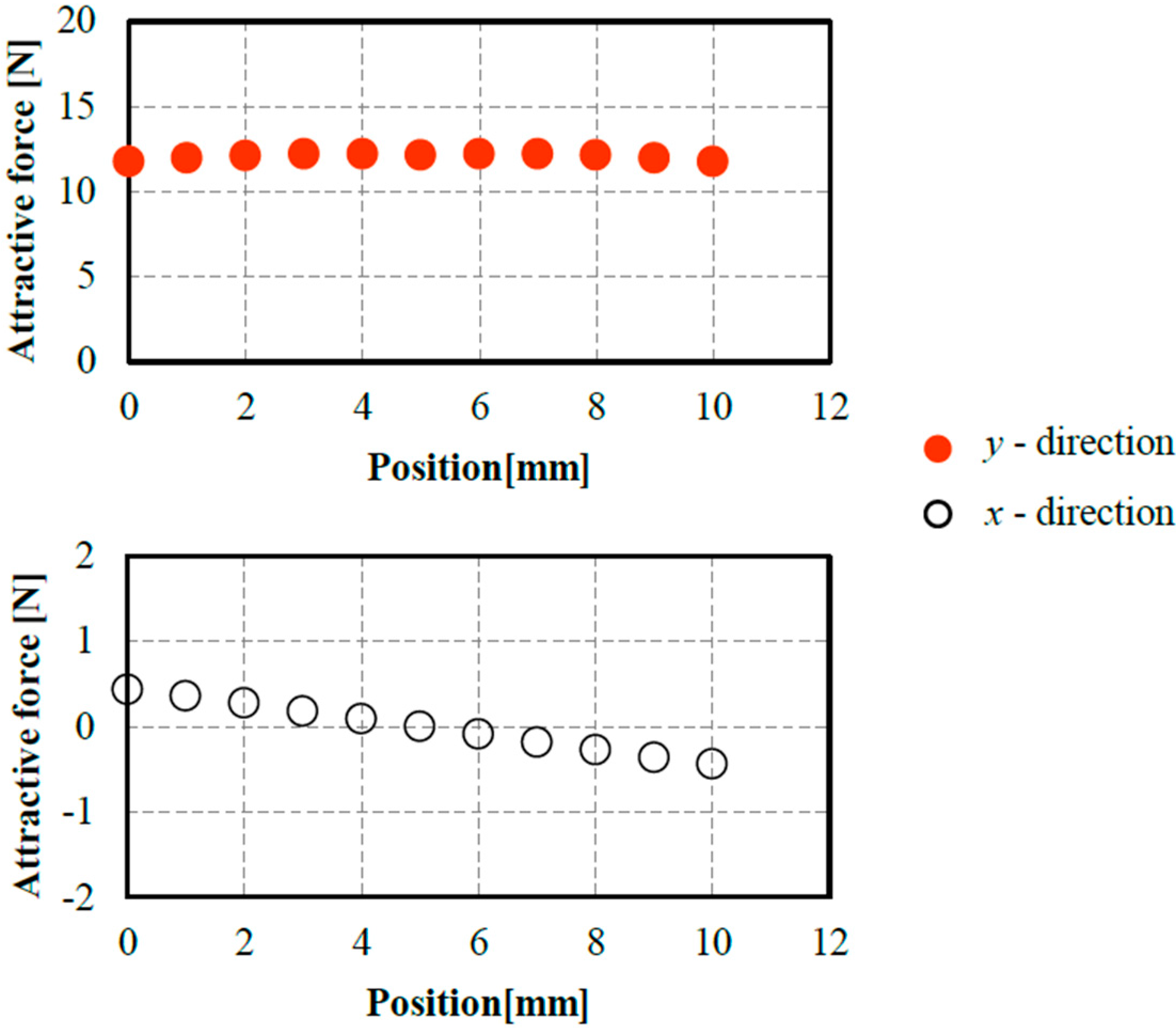
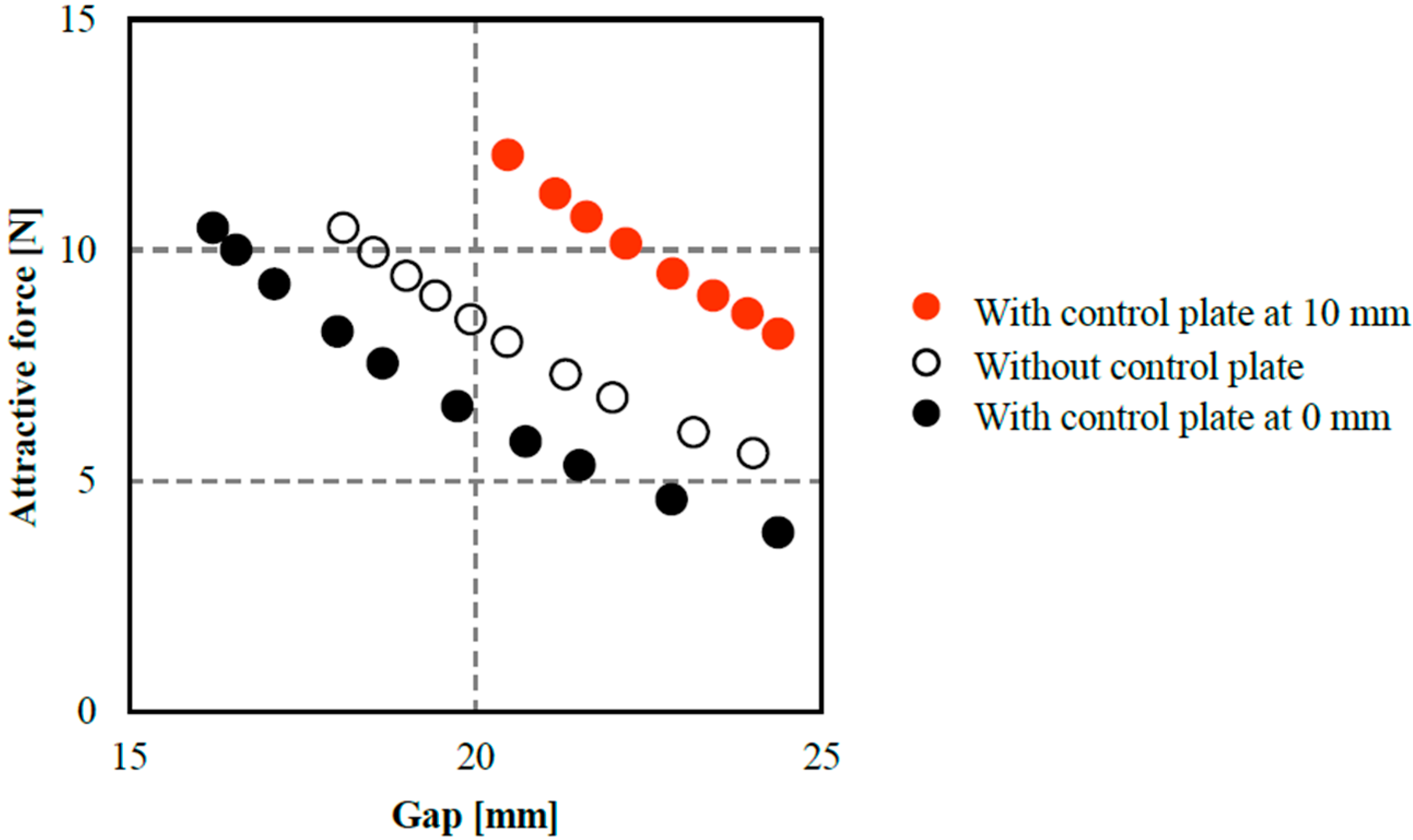
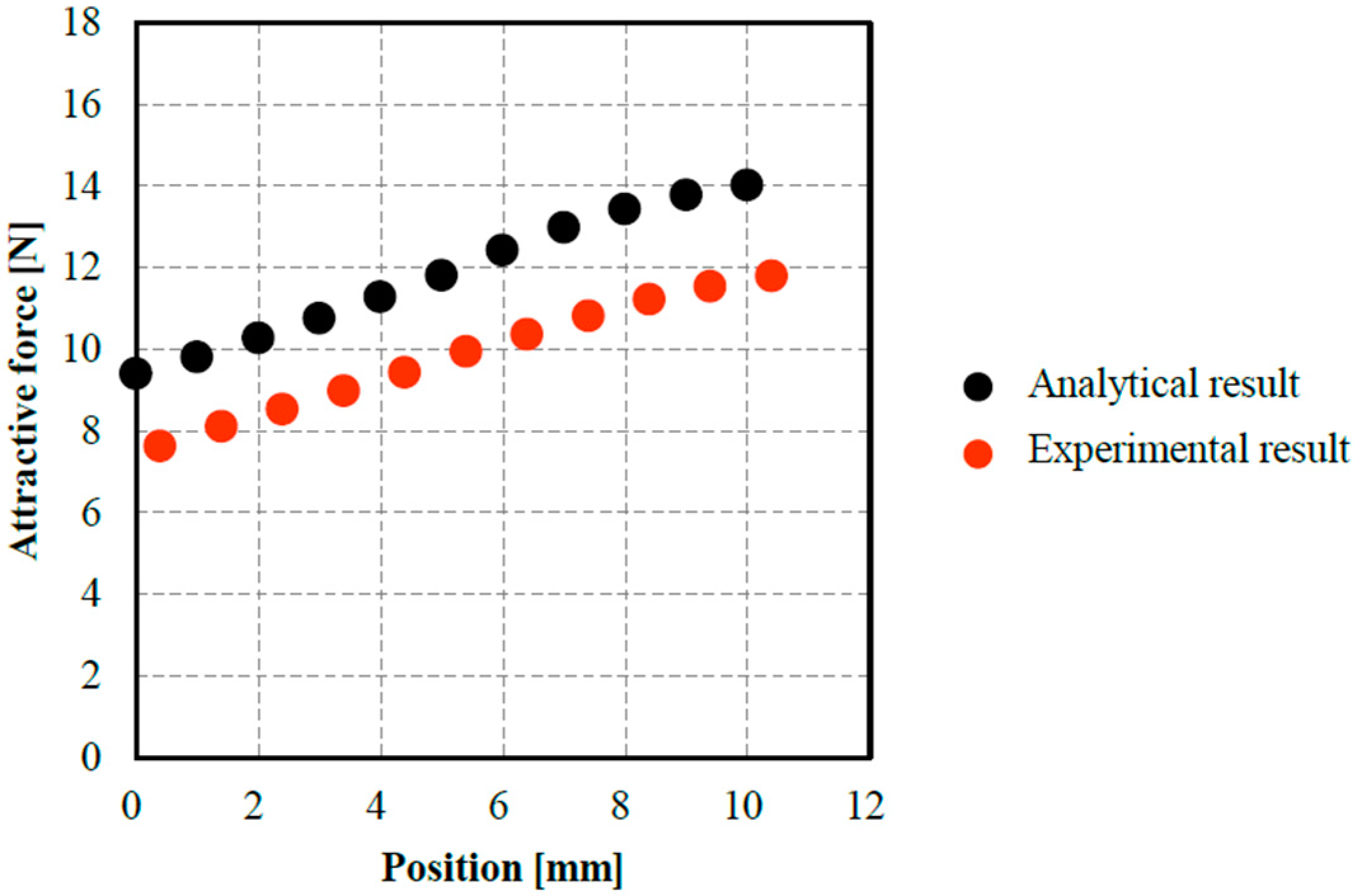
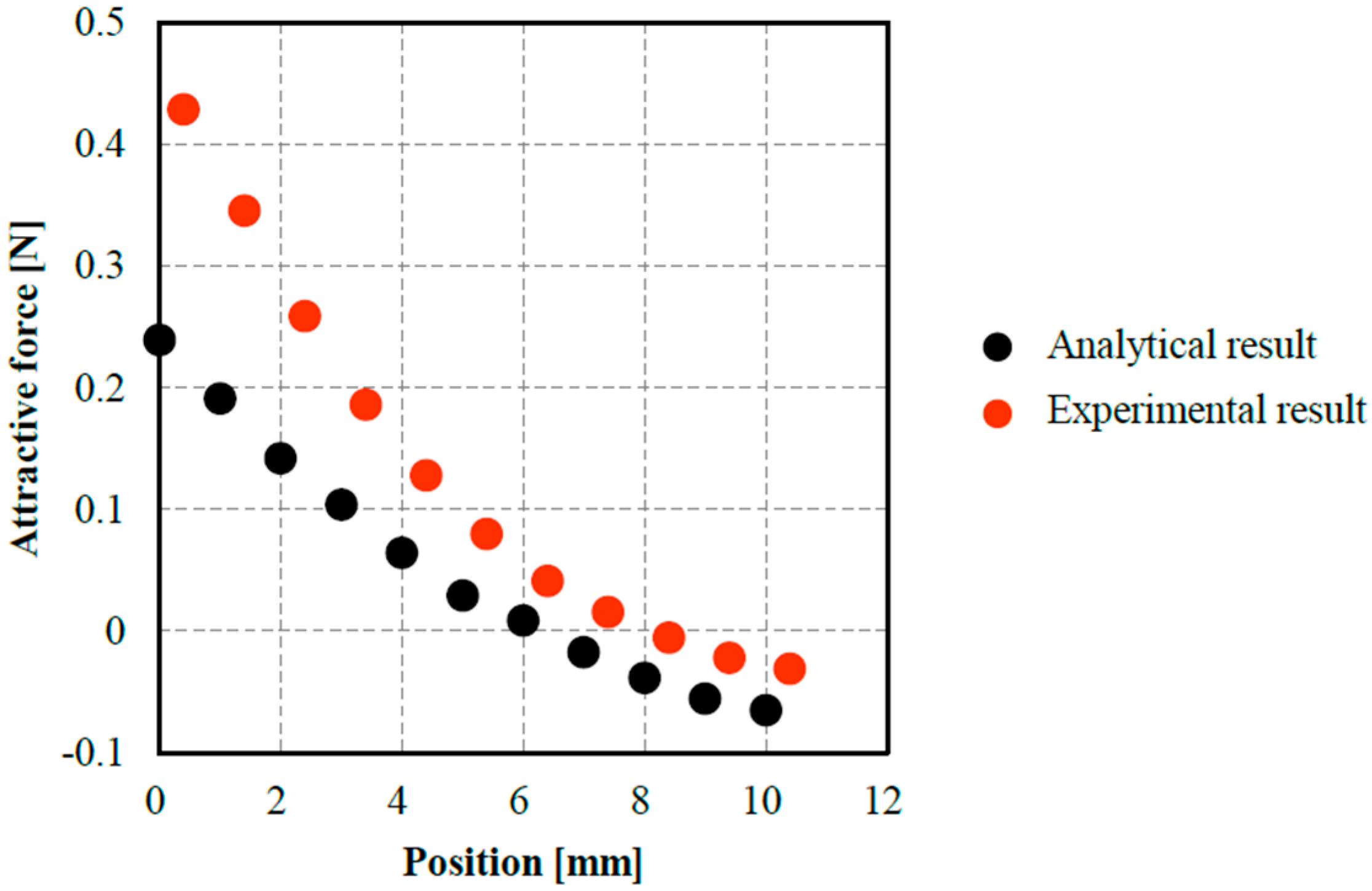
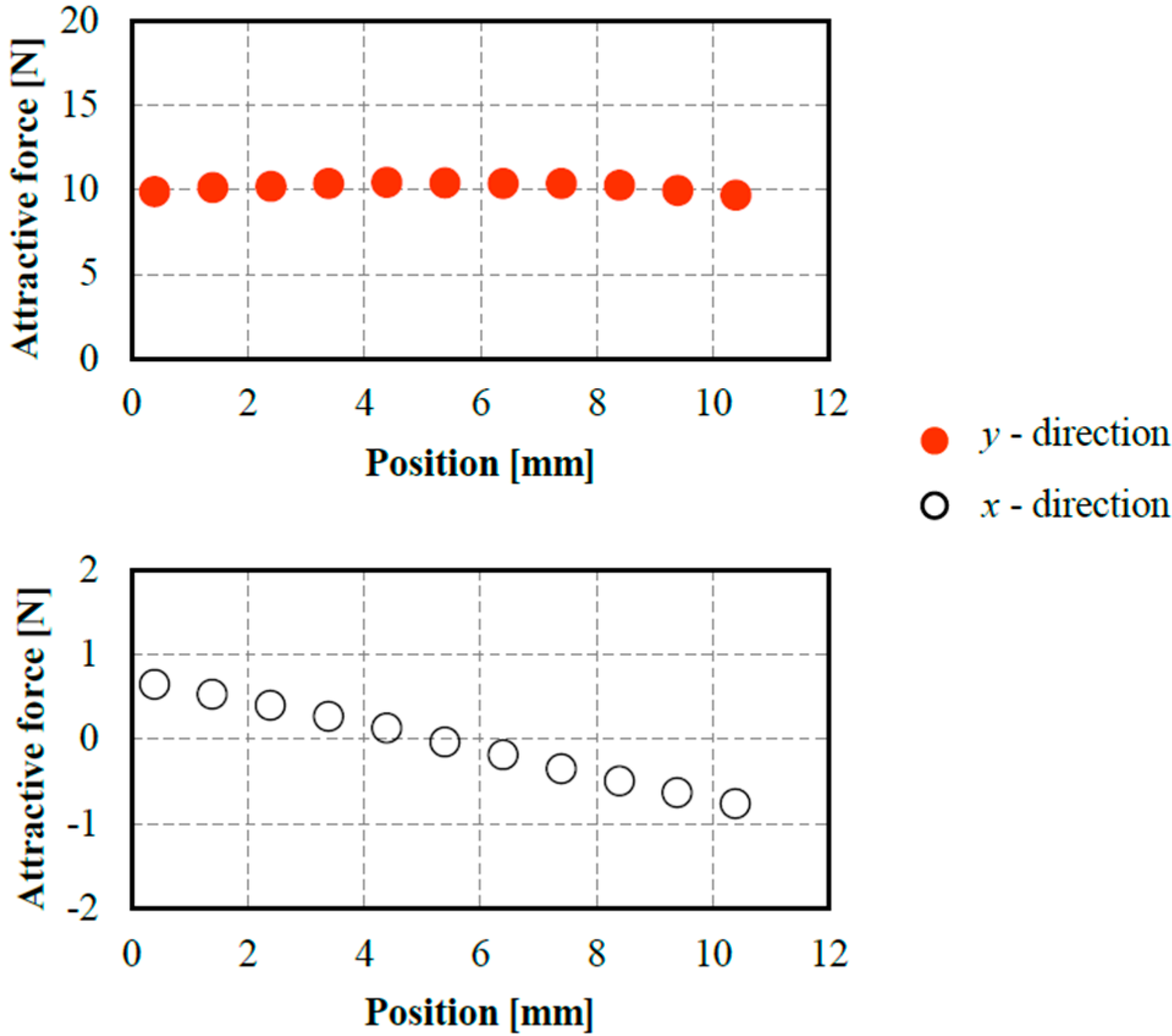
3.2. Attractive Force Characteristics
4. Experiment
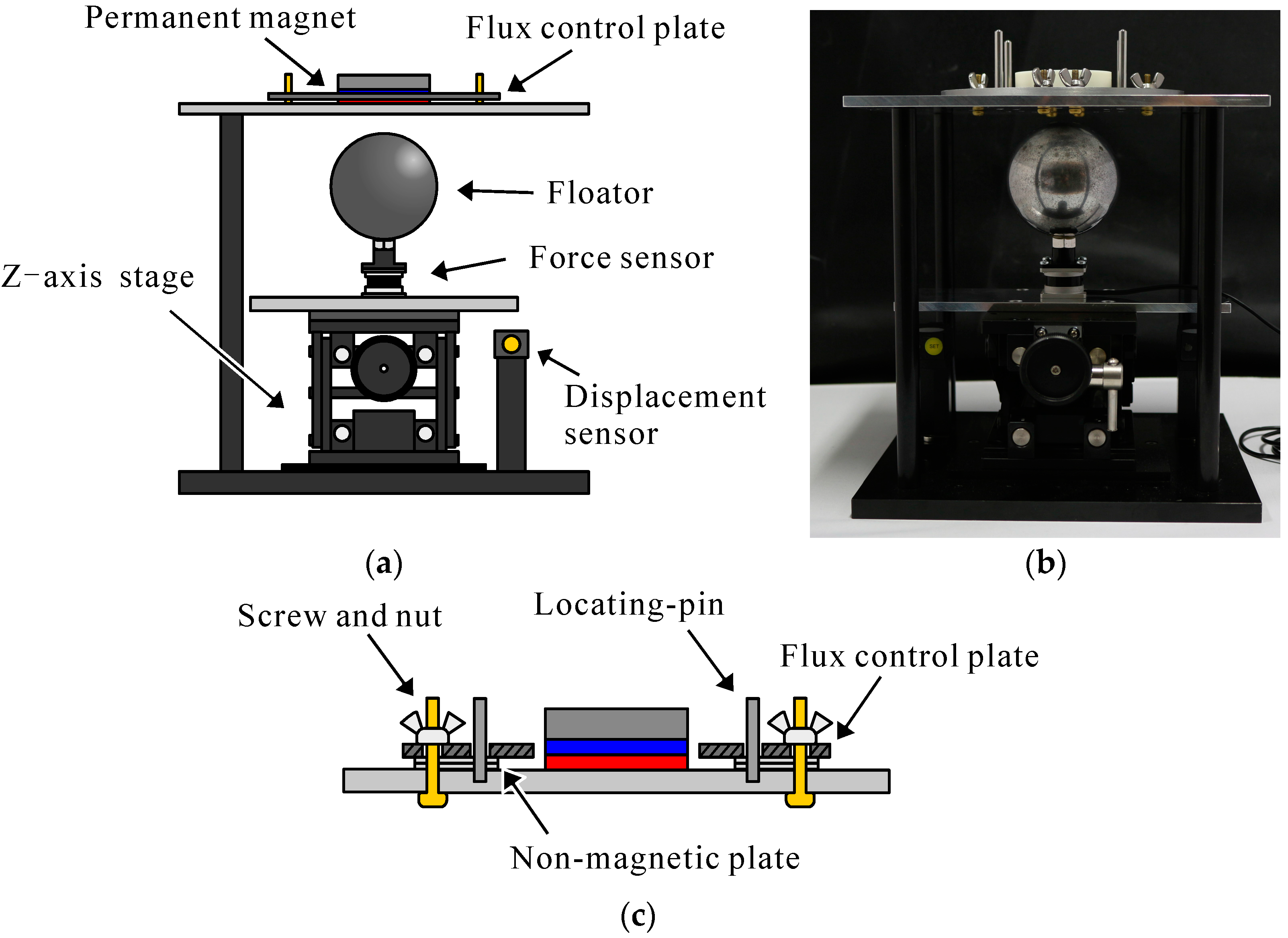
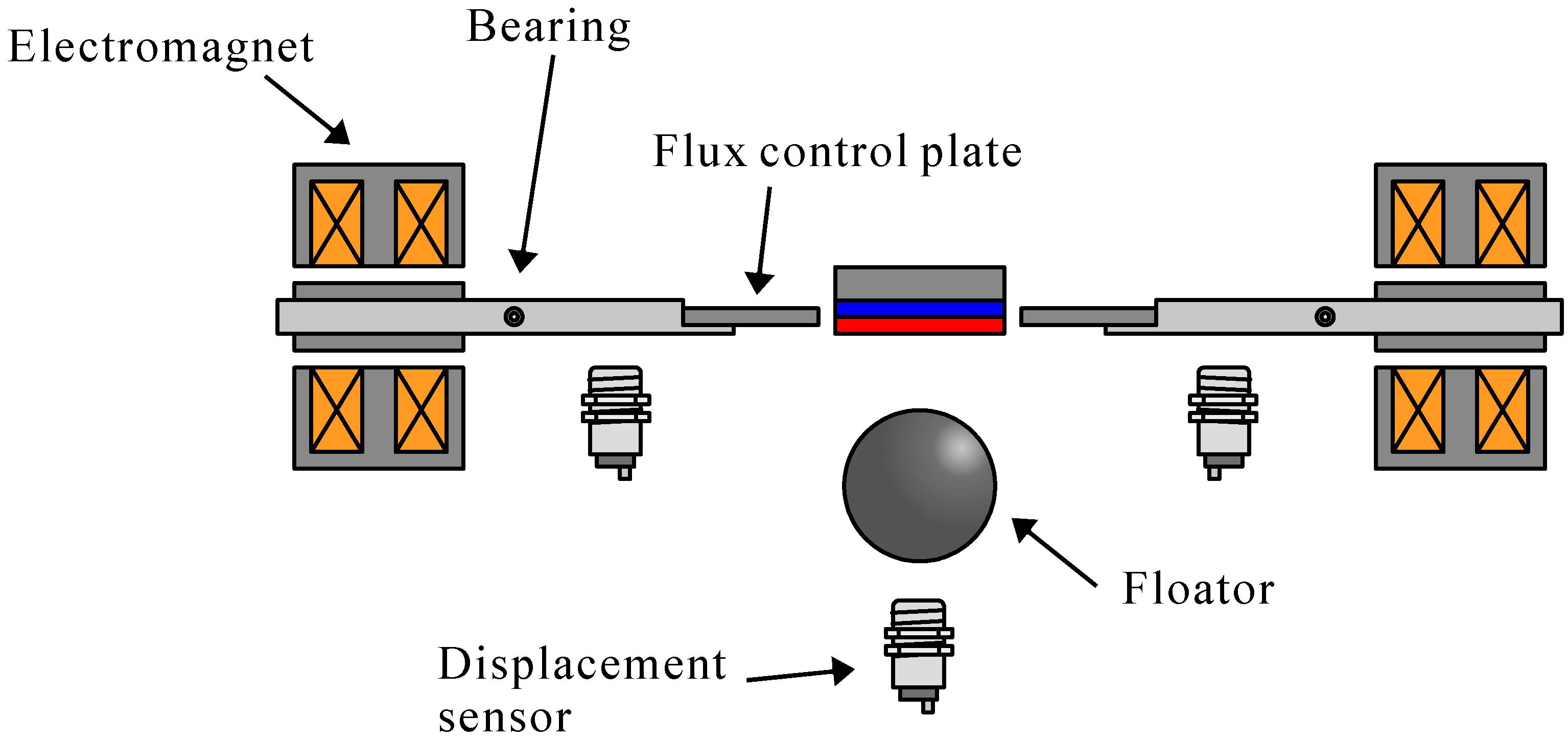
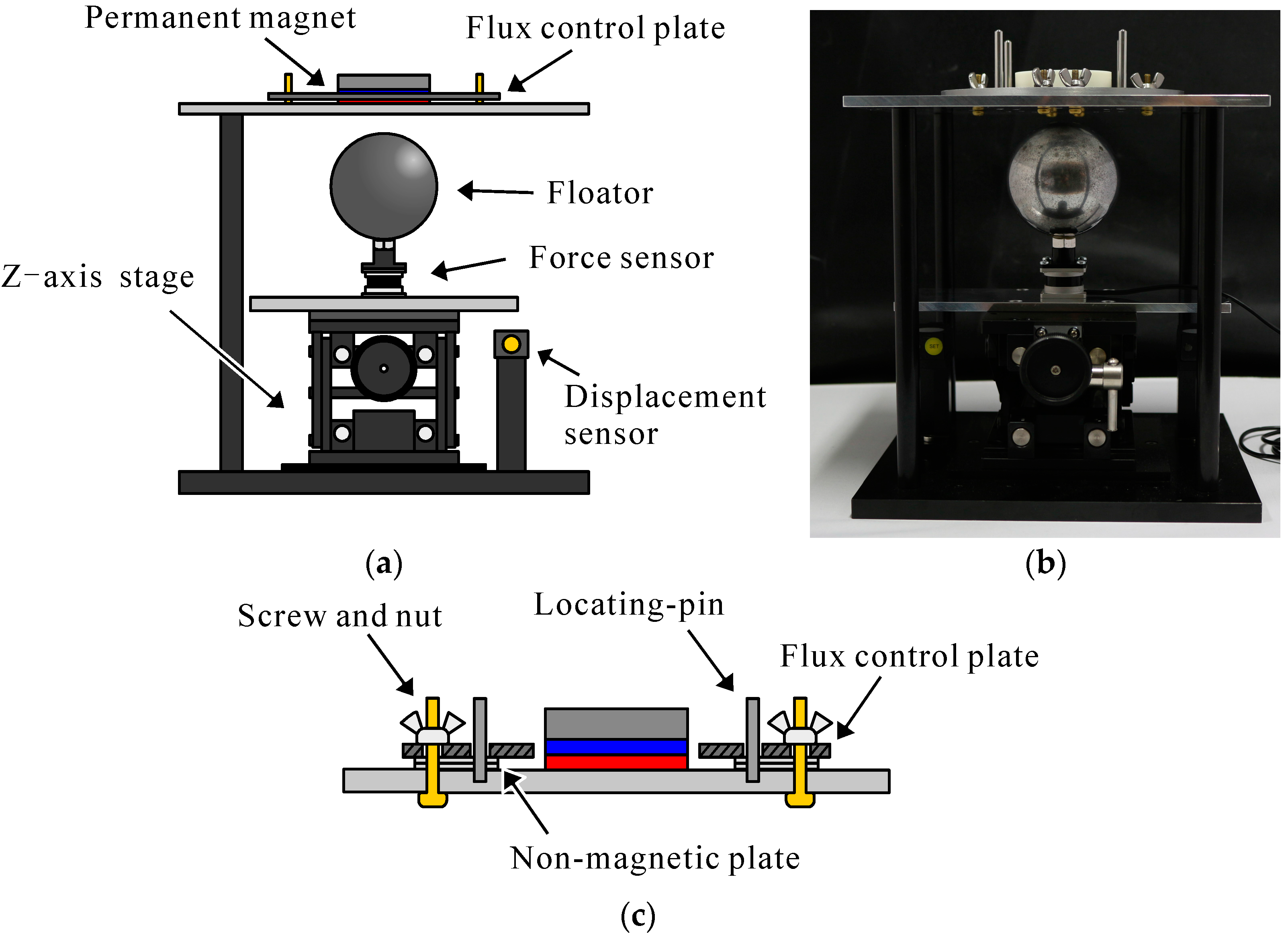
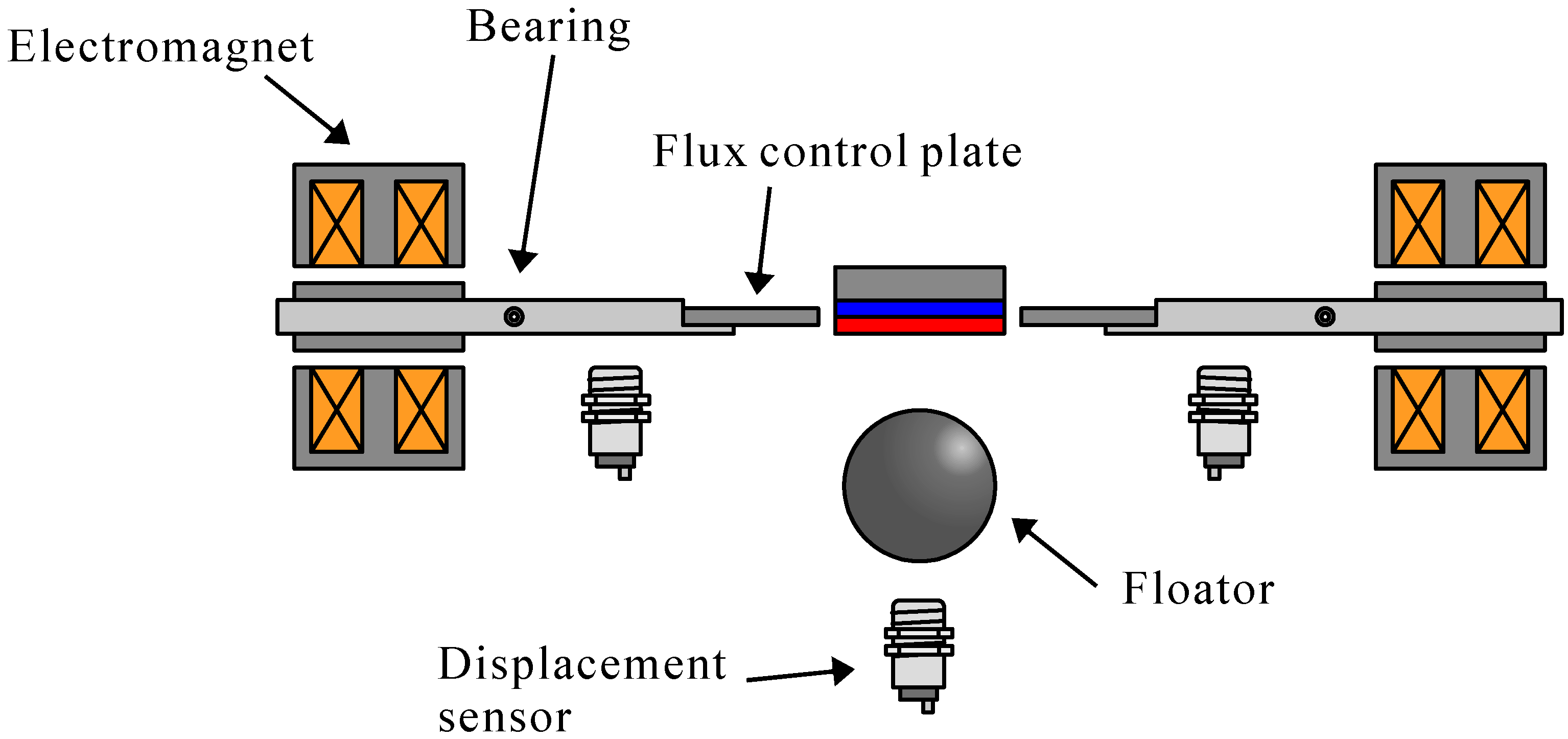
Experimental Apparatus
5. Design of Flux-Path Control Mechanism
6. Conclusions
Author Contributions
Conflicts of Interest
Appendix A
References
- Jayawant, B.V. Electromagnetic Levitation and Suspension Techniques; Edward Arnold Publishers Limited: London, UK, 1981; pp. 1–17. [Google Scholar]
- Schweitzer, G.; Maslen, E.H. (Eds.) Magnetic Bearings; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–68.
- The Magnetic Levitation Technical Committee of the Institute of Electrical Engineers of Japan (IEE Japan) (Ed.) Magnetic Suspension Technology; Corona Publishing Co., Ltd.: Tokyo, Japan, 1993; pp. 8–13.
- Mizuno, T.; Sakai, Y.; Ishino, Y.; Takasaki, M. Fabrication of a New Wind Tunnel for Spinning Body Using Magnetic Suspension. In Proceedings of the 13th International Symposium on Magnetic Bearings (ISMB13), Arlington, VA, USA, 6–9 August 2012.
- Bahr, F.; Monch, I.; Ernst, D.; Zerna, T.; Schmidt, O.G.; Hofmann, W. Direct Field Control of AMBs Using Flux Feedback Based on Integrable Hall Sensors. In Proceedings of the 15th International Symposium on Magnetic Bearings (ISMB15), Kitakyushu, Japan, 3–6 August 2016.
- Bahr, F.; Melzer, M.; Karnaushenko, D.; Makarov, D.; Bermudez, G.C.; Schmidt, O.G.; Hofmann, W. Permanent Magnet Bias AMB Using Integrated Hall Sensor Based Air Gap Flux Density Feedback. In Proceedings of the 1st Brazilian Workshop on Magnetic Bearings, Rio de Janeiro, Brazil, 25–26 October 2013.
- Mystkowski, A.; Pawluszewicz, E. Remarks on Some Robust Nonlinear Observer and State-Feedback Zero-Bias Control of AMB. In Proceedings of the IEEE 16th International Carpathian Control Conference, Szilvásvárad, Hungary, 27–30 May 2015; pp. 328–333.
- Jastrzebski, R.P.; Smirnov, A.; Mystkowski, A.; Pyrhönen, O. Cascaded Position-Flux Controller for AMB System Operating at Zero Bias. Energies 2014, 7, 3561–3575. [Google Scholar] [CrossRef]
- Higuchi, T.; Oka, K. Reluctance Control Magnetic Suspension System—Suspension System with Permanent Magnet and Linear Actuator. Electr. Eng. Jpn. 1993, 114, 115–123. [Google Scholar] [CrossRef]
- Oka, K.; Fujiwara, Y.; Cui, T.; Mihara, T. Mag-Lev system Using Permanent Magnet and Rotary Actuator. In Proceedings of the 47th Japan Joint Automatic Control Conference, Chiba, Japan, 26–27 November 2004; p. 316. (In Japanese)
- Mizuno, T.; Hoshino, H.; Ishino, Y.; Takasaki, M. Proposal and Basic Experimental Study of Flux Path Control Magnetic Suspension. J. Jpn. Soc. Appl. Electromagn. Mech. 2006, 14, 346–352. (In Japanese) [Google Scholar]
- Mizuno, T.; Sakai Y.; Takasaki, M.; Ishino, Y. Development of Flux-Path Control Module with a Single Actuator. J. Jpn. Soc. Appl. Electromagn. Mech. 2012, 20, 94–299. (In Japanese) [Google Scholar]
- Furutachi, M.; Inaba, S.; Ishino, Y.; Takasaki, M.; Mizuno, T. Three-Dimensional Force Measurement and Control of a Flux-Path Control Magnetic Suspension. J. Syst. Des. Dyn. 2008, 2, 1239–1249. (In Japanese) [Google Scholar] [CrossRef]
- Mizuno, T.; Yoneno, Y.; Ishino, Y.; Takasaki, M. Proposal of Flux-Path Control Magnetic Suspension Using Flux Concentration. In Proceedings of the 1st Brazilian Workshop on Magnetic Bearings, Rio de Janeiro, Brazil, 25–26 October 2013.
- Mizuno, T.; Hirai, Y.; Ishino, Y.; Takasaki, M. Flux-Path Control Magnetic Suspension System Using Voice Coil Motors. J. Syst. Des. Dyn. 2007, 1, 147–158. [Google Scholar] [CrossRef]
- Hasan, S.; Mizuno, T.; Takasaki, M.; Ishino, Y.; Hara, M.; Yamaguchi, D. Design and Fabrication of an Enlarged Wind Tunnel System for Spinning Body Using Magnetic Suspension. J. Jpn. Soc. Appl. Electromagn. Mech. 2016, 24, 264–270. [Google Scholar] [CrossRef]



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ishibashi, N.; Mizuno, T.; Ishino, Y.; Yamaguchi, D.; Hara, M.; Takasaki, M.; Yamada, K. The Proposal of Magnetic Suspension using Laterally Control Flux-Path Mechanism. Actuators 2017, 6, 11. https://doi.org/10.3390/act6010011
Ishibashi N, Mizuno T, Ishino Y, Yamaguchi D, Hara M, Takasaki M, Yamada K. The Proposal of Magnetic Suspension using Laterally Control Flux-Path Mechanism. Actuators. 2017; 6(1):11. https://doi.org/10.3390/act6010011
Chicago/Turabian StyleIshibashi, Naoki, Takeshi Mizuno, Yuji Ishino, Daisuke Yamaguchi, Masayuki Hara, Masaya Takasaki, and Kazuki Yamada. 2017. "The Proposal of Magnetic Suspension using Laterally Control Flux-Path Mechanism" Actuators 6, no. 1: 11. https://doi.org/10.3390/act6010011