A Multiobjective Perspective to Optimal Sensor Placement by Using a Decomposition-Based Evolutionary Algorithm in Structural Health Monitoring



Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
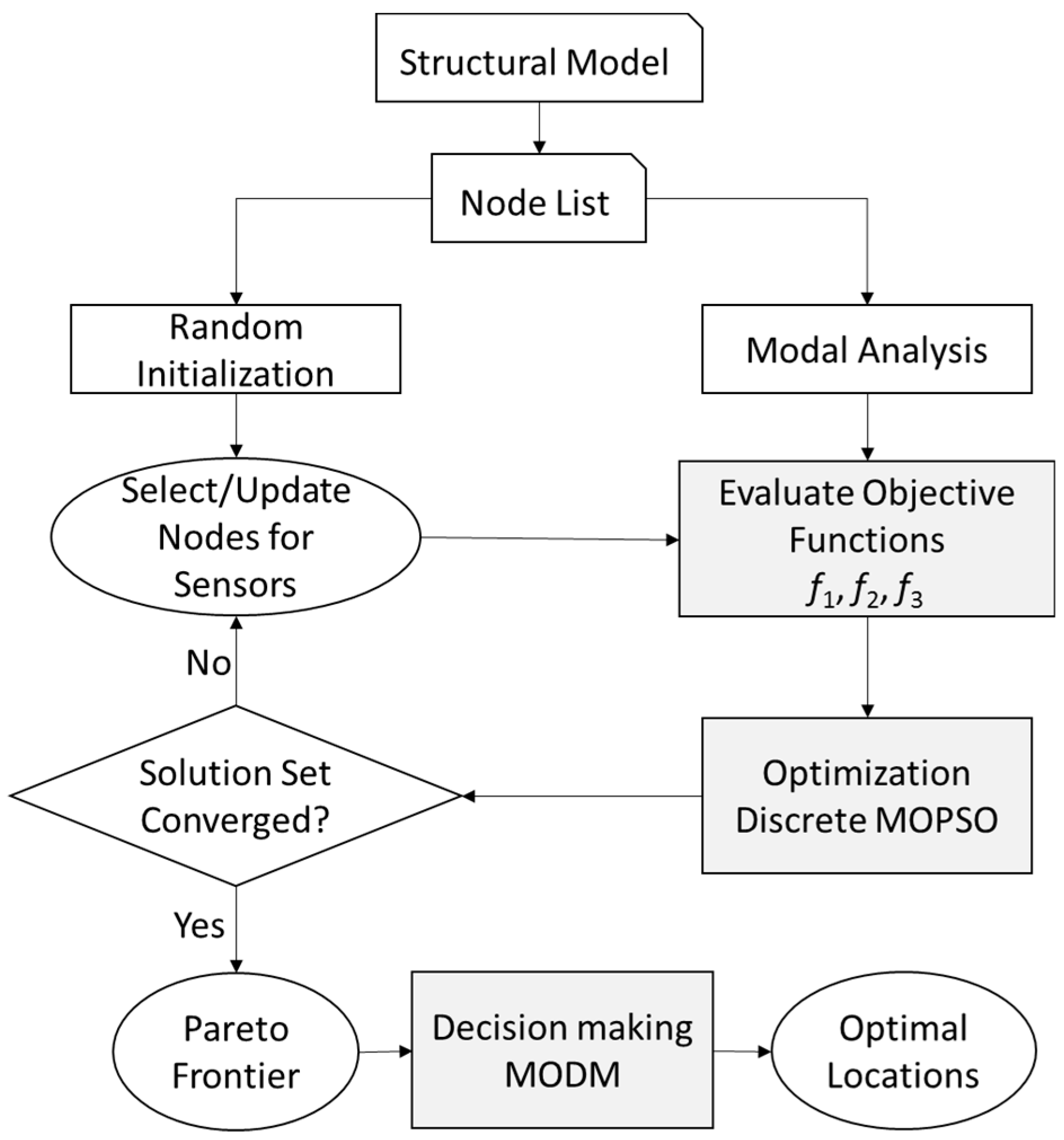
2.1. Optimization Procedure
2.2. Objective Functions
2.2.1. Linear Independency of Mode Shapes
2.2.2. Dynamic Information Redundancy
2.2.3. Vibration Response Strength
2.3. Multiobjective Optimization Algorithm
2.3.1. Discrete Particle Status
- Position: In PSO, the position vector represents a solution of the optimized problem. For the OSP problem, the position permutation of a particle i is defined as . Each dimension of position is a random integer , where n is equal to the total number of DOFs. The positions of all particles pertain to potential sensor nodes; all initial positions are randomly sampled.
- Velocity: The discrete velocity of particle i is defined as . The parameter is binary-coded. Moreover, if , the corresponding element in the position vector changes; otherwise, maintains its original state. The initial velocity of the particles is 0.
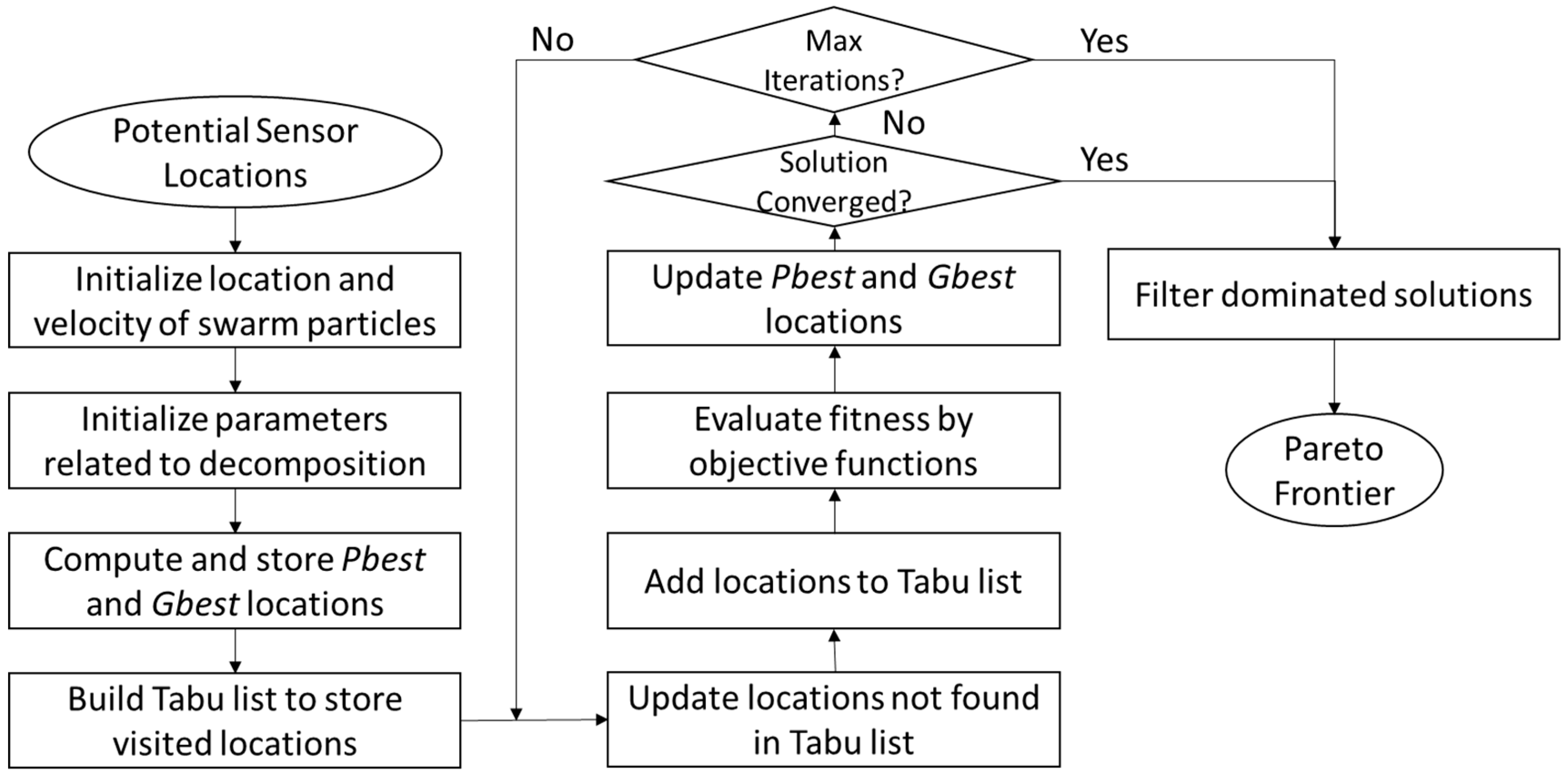
2.3.2. DMOPSO
- Generate a well-distributed weighted vector (.
- Initialize neighborhood N according to the Euclidean distance (i.e.,, .
- Set the initial reference point .
- The personal best position initialization , .
- Set t = 0.
- Randomly select one particle from the neighbors as the Gbest particle.
- Calculate the new position .
- Compute the objective function vector F.
- Update the neighborhood solutions. For the jth particle in the neighborhood of the ith particle, if .
- Update reference point .
- Update the personal best solution Pbest.
- Set t = t + 1.
2.4. Decision on the Pareto Frontier
3. Validation
3.1. Model Setup
3.2. Results
3.3. Discussion
4. Application
4.1. Model Setup
4.2. Result and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Symbol | Description |
| Φ | Mode shape matrix |
| Exploration space | |
| Membership function | |
| Inertia weight of particles | |
| Decomposition penalty | |
| N | Population size |
| T | Neighborhood size |
| f | Objective function |
| m | Order of modes |
| n | Number of DOFs |
| s | Number of sensors |
| t | Number of iterations |
| Discrete velocity of particles | |
| w | Weighting of objective function |
| Node number | |
| CD | Closeness distance |
| MAC | Modal assurance criterion matrix, corresponding to |
| MKE | Modal kinetic energy matrix, corresponding to |
| SIM | Similarity matrix, corresponding to |
References
- Kammer, D.C. Sensor placement for on-orbit modal identification and correlation of large space structures. J. Guid. Control Dyn. 1991, 14, 251–259. [Google Scholar] [CrossRef]
- Heo, G.; Wang, M.; Satpathi, D. Optimal transducer placement for health monitoring of long span bridge. Soil Dyn. Earthq. Eng. 1997, 16, 495–502. [Google Scholar] [CrossRef]
- Papadimitriou, C. Optimal sensor placement methodology for parametric identification of structural systems. J. Sound Vib. 2004, 278, 923–947. [Google Scholar] [CrossRef]
- Ewins, D.J.; Saunders, H. Modal Testing: Theory and Practice. J. Vib. Acoust. 1986, 108, 109–110. [Google Scholar] [CrossRef]
- Carne, T.G.; Dohrmann, C.R. A Modal Test Design Strategy for Model Correlation; Sandia National Labs: Albuquerque, NM, USA, 1994.
- Sun, H.; Büyüköztürk, O. Optimal sensor placement in structural health monitoring using discrete optimization. Smart Mater. Struct. 2015, 24, 125034. [Google Scholar] [CrossRef]
- Ostachowicz, W.; Soman, R.; Malinowski, P. Optimization of sensor placement for structural health monitoring: A review. Struct. Health Monit. 2019, 18, 963–988. [Google Scholar] [CrossRef]
- Deb, K.; Jain, H. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point-Based Nondominated Sorting Approach, Part I: Solving Problems with Box Constraints. IEEE Trans. Evol. Comput. 2013, 18, 577–601. [Google Scholar] [CrossRef]
- Yang, S.; Li, M.; Liu, X.; Zheng, J. A Grid-Based Evolutionary Algorithm for Many-Objective Optimization. IEEE Trans. Evol. Comput. 2013, 17, 721–736. [Google Scholar] [CrossRef]
- Wang, R.; Purshouse, R.C.; Fleming, P.J. Preference-inspired coevolutionary algorithms for many-objective optimization. IEEE Trans. Evol. Comput. 2013, 17, 474–494. [Google Scholar] [CrossRef]
- Cheng, R.; Jin, Y.; Olhofer, M.; Sendhoff, B. A Reference Vector Guided Evolutionary Algorithm for Many-Objective Optimization. IEEE Trans. Evol. Comput. 2016, 20, 773–791. [Google Scholar] [CrossRef]
- Bader, J.; Zitzler, E. HypE: An Algorithm for Fast Hypervolume-Based Many-Objective Optimization. Evol. Comput. 2011, 19, 45–76. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Li, H. MOEA/D: A Multiobjective Evolutionary Algorithm Based on Decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Feng, S.; Jia, J. Acceleration sensor placement technique for vibration test in structural health monitoring using microhabitat frog-leaping algorithm. Struct. Health Monit. 2017, 17, 169–184. [Google Scholar] [CrossRef]
- Guo, Y.; Ni, Y.; Chen, S. Optimal sensor placement for damage detection of bridges subject to ship collision. Struct. Control Health Monit. 2016, 24, e1963. [Google Scholar] [CrossRef]
- Lin, J.-F.; Xu, Y.; Law, S.-S. Structural damage detection-oriented multi-type sensor placement with multi-objective optimization. J. Sound Vib. 2018, 422, 568–589. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. A discrete binary version of the particle swarm algorithm. In Proceedings of the 1997 IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation, Orlando, FL, USA, 12–15 October 1997; Volume 5, pp. 4104–4108. [Google Scholar]
- Coello, C.; Pulido, G.; Lechuga, M. Handling multiple objectives with particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 256–279. [Google Scholar] [CrossRef]
- Nebro, A.; Durillo, J.; Garcia-Nieto, J.; Coello, C.C.; Luna, F.; Alba, E. SMPSO: A new PSO-based metaheuristic for multi-objective optimization. In Proceedings of the 2009 IEEE Symposium on Computational Intelligence in Multi-Criteria Decision-Making, Nashville, TN, USA, 30 March–2 April 2009; pp. 66–73. [Google Scholar]
- Al Moubayed, N.; Petrovski, A.; McCall, J. D2MOPSO: MOPSO Based on Decomposition and Dominance with Archiving Using Crowding Distance in Objective and Solution Spaces. Evol. Comput. 2014, 22, 47–77. [Google Scholar] [CrossRef]
- Lin, Q.; Li, J.; Du, Z.; Chen, J.; Ming, Z. A novel multi-objective particle swarm optimization with multiple search strategies. Eur. J. Oper. Res. 2015, 247, 732–744. [Google Scholar] [CrossRef]
- Gong, M.; Cai, Q.; Chen, X.; Ma, L. Complex Network Clustering by Multiobjective Discrete Particle Swarm Optimization Based on Decomposition. IEEE Trans. Evol. Comput. 2013, 18, 82–97. [Google Scholar] [CrossRef]
- Friswell, M.; Garvey, S.; Penny, J. Model reduction using dynamic and iterated IRS techniques. J. Sound Vib. 1995, 186, 311–323. [Google Scholar] [CrossRef]
- Friswell, M.; Garvey, S.; Penny, J. The convergence of the iterated IRS method. J. Sound Vib. 1998, 211, 123–132. [Google Scholar] [CrossRef]
- Li, D.-S.; Li, H.; Fritzen, C. The connection between effective independence and modal kinetic energy methods for sensor placement. J. Sound Vib. 2007, 305, 945–955. [Google Scholar] [CrossRef]
- Behera, S.; Sahoo, S.; Pati, B. A review on optimization algorithms and application to wind energy integration to grid. Renew. Sustain. Energy Rev. 2015, 48, 214–227. [Google Scholar] [CrossRef]
- Yi, T.-H.; Li, H.-N.; Zhang, X.-D. Health monitoring sensor placement optimization for Canton Tower using immune monkey algorithm. Struct. Control Health Monit. 2014, 22, 123–138. [Google Scholar] [CrossRef]
- Yi, T.-H.; Li, H.-N.; Zhang, X.-D. Sensor placement on Canton Tower for health monitoring using asynchronous-climb monkey algorithm. Smart Mater. Struct. 2012, 21. [Google Scholar] [CrossRef]
- Ni, Y.; Xia, Y.; Lin, W.; Chen, W.; Ko, J. SHM benchmark for high-rise structures: A reduced-order finite element model and field measurement data. Smart Struct. Syst. 2012, 10, 411–426. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set No. | Objective Function | Membership Function | |||||
|---|---|---|---|---|---|---|---|
| f1 | f2 | f3 | CD | ||||
| 1 | 4.2023 | 6.4217 | 1.9346 | 0.9855 | 0.0039 | 0.9974 | 1.4022 |
| 2 | 3.2291 | 6.9469 | 2.0654 | 0.9959 | 0.0001 | 0.9749 | 1.3937 |
| 3 | 3.2291 | 6.9469 | 2.0654 | 0.9959 | 0.0001 | 0.9749 | 1.3937 |
| 4 | 3.2291 | 6.9469 | 2.0654 | 0.9959 | 0.0001 | 0.9749 | 1.3937 |
| 5 | 3.2932 | 7.0005 | 1.9632 | 0.9964 | 0.0003 | 0.9943 | 1.4077 |
| 6 | 2.9205 | 6.9322 | 2.1283 | 0.9991 | 0.0013 | 0.9644 | 1.3886 |
| 7 | 3.7596 | 7.0590 | 2.0437 | 0.9921 | 0.0010 | 0.9854 | 1.3983 |
| 8 | 3.2291 | 6.9469 | 2.0654 | 0.9959 | 0.0001 | 0.9749 | 1.3937 |
| 9 | 3.2932 | 7.0005 | 1.9632 | 0.9964 | 0.0003 | 0.9943 | 1.4077 |
| 10 | 3.3699 | 8.1701 | 1.9502 | 0.9959 | 0.0000 | 0.9987 | 1.4104 |
| 11 | 3.8235 | 7.0973 | 1.9064 | 0.9911 | 0.0005 | 0.9972 | 1.4060 |
| 12 | 3.2932 | 7.0005 | 1.9632 | 0.9964 | 0.0003 | 0.9943 | 1.4077 |
| 13 | 3.3699 | 8.1701 | 1.9502 | 0.9959 | 0.0000 | 0.9987 | 1.4104 |
| 14 | 3.7296 | 6.7387 | 1.9861 | 0.9917 | 0.0076 | 0.9984 | 1.4073 |
| 15 | 3.5830 | 6.7788 | 1.9682 | 0.9927 | 0.0008 | 0.9957 | 1.4060 |
| 16 | 3.3699 | 8.1701 | 1.9502 | 0.9959 | 0.0000 | 0.9987 | 1.4104 |
| 17 | 2.8888 | 7.2074 | 2.1425 | 0.9991 | 0.0000 | 0.9692 | 1.3920 |
| 18 | 3.2932 | 7.0005 | 1.9632 | 0.9964 | 0.0003 | 0.9943 | 1.4077 |
| 19 | 3.7296 | 6.7387 | 1.9861 | 0.9917 | 0.0076 | 0.9984 | 1.4073 |
| 20 | 3.8045 | 6.8785 | 1.9493 | 0.9899 | 0.0006 | 0.9997 | 1.4069 |
| 21 | 3.4290 | 7.5629 | 1.9786 | 0.9954 | 0.0000 | 0.9935 | 1.4063 |
| 22 | 3.1451 | 7.2698 | 2.0283 | 0.9978 | 0.0006 | 0.9874 | 1.4038 |
| 23 | 3.8045 | 6.8785 | 1.9493 | 0.9899 | 0.0006 | 0.9997 | 1.4069 |
| 24 | 3.5403 | 7.7830 | 1.8722 | 0.9949 | 0.0000 | 0.9984 | 1.4093 |
| 25 | 3.7296 | 6.7387 | 1.9861 | 0.9917 | 0.0076 | 0.9984 | 1.4073 |
| 26 | 3.1596 | 7.8314 | 1.8752 | 0.9973 | 0.0002 | 0.9957 | 1.4093 |
| 27 | 3.3179 | 7.3410 | 2.0130 | 0.9971 | 0.0002 | 0.9938 | 1.4078 |
| 28 | 3.1799 | 6.7150 | 1.9181 | 0.9934 | 0.0010 | 0.9988 | 1.4087 |
| 29 | 3.1451 | 7.2698 | 2.0283 | 0.9978 | 0.0006 | 0.9874 | 1.4038 |
| 30 | 3.3699 | 8.1701 | 1.9502 | 0.9959 | 0.0000 | 0.9987 | 1.4104 |
| 31 | 3.8045 | 6.8785 | 1.9493 | 0.9899 | 0.0006 | 0.9997 | 1.4069 |
| 32 | 3.5207 | 7.1577 | 1.9210 | 0.9926 | 0.0003 | 1.0000 | 1.4090 |
| 33 | 3.0762 | 7.0062 | 2.0031 | 0.9987 | 0.0011 | 0.9883 | 1.4051 |
| Mean | 3.4196 | 7.1525 | 1.9843 | 0.9946 | 0.0011 | 0.9915 | 1.4044 |
| Direction | MOP-No. 28 | Reference [27] | Reference [6] (o.1) | Reference [6] (o.2) |
|---|---|---|---|---|
| x | 5, 6, 10, 14, 16, 17, 22, 25, 26, 27 | 2, 6, 14, 20, 21, 22, 23, 24, 29 | 2, 3, 17, 18, 19, 20, 21, 22, 23 | 1, 2, 3, 4, 5, 14, 18, 19, 20, 21, 26 |
| y | 3, 4, 9, 11, 16, 20, 22, 25, 26, 27 | 1, 2, 4, 5, 6, 7, 11, 16, 20, 22, 23 | 1, 2, 3, 10, 17, 19, 20, 21, 22, 24, 28 | 3, 4, 5, 8, 17, 19, 20, 23, 27 |
| Method | f1 | f2 | f3 | CD | |||
|---|---|---|---|---|---|---|---|
| MOP-No. 28 | 3.1799 | 6.7150 | 1.9181 | 0.9934 | 0.0001 | 0.9624 | 1.4087 |
| Reference [27] | 6.8546 | 6.1141 | 3.1888 | - | - | - | - |
| Reference [6] (o.1) | 4.7892 | 7.6955 | 2.7343 | - | - | - | - |
| Reference [6] (o.2) | 2.1766 | 6.0536 | 1.9181 | 1.0000 | 0.0247 | 0.6191 | 1.1764 |
| Mode | FEM | EXP (MOP) | Error |
|---|---|---|---|
| 1 | 20.957 | 18 | −14% |
| 2 | 20.957 | 18 | −14% |
| 3 | 27.896 | 22 | −21% |
| 4 | 64.043 | 54 | −16% |
| 5 | 64.043 | 55 | −14% |
| 6 | 88.013 | 70 | −20% |
| 7 | 105.76 | 96 | −9% |
| 8 | 113.89 | 103 | −10% |
| 9 | 113.89 | 104 | −9% |
| 10 | 134.46 | 119 | −11% |
| Method | X-Direction | Y-Direction | f1 | f2 | f3 |
|---|---|---|---|---|---|
| MOP | 5, 16, 25, 31 | 6, 15, 25, 34 | 0.2633 | 1.8006 | 1 |
| FSSP | 7, 12, 26, 28 | 4, 6, 18, 22 | 0.1475 | 1.9335 | 2.2136 |
| Random | 11, 19, 23, 31 | 5, 9, 17, 21 | 0.4197 | 2.7686 | 0.9078 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, T.-Y.; Tao, J.; Huang, H.-H. A Multiobjective Perspective to Optimal Sensor Placement by Using a Decomposition-Based Evolutionary Algorithm in Structural Health Monitoring. Appl. Sci. 2020, 10, 7710. https://doi.org/10.3390/app10217710
Lin T-Y, Tao J, Huang H-H. A Multiobjective Perspective to Optimal Sensor Placement by Using a Decomposition-Based Evolutionary Algorithm in Structural Health Monitoring. Applied Sciences. 2020; 10(21):7710. https://doi.org/10.3390/app10217710
Chicago/Turabian StyleLin, Tsung-Yueh, Jin Tao, and Hsin-Haou Huang. 2020. "A Multiobjective Perspective to Optimal Sensor Placement by Using a Decomposition-Based Evolutionary Algorithm in Structural Health Monitoring" Applied Sciences 10, no. 21: 7710. https://doi.org/10.3390/app10217710
APA StyleLin, T.-Y., Tao, J., & Huang, H.-H. (2020). A Multiobjective Perspective to Optimal Sensor Placement by Using a Decomposition-Based Evolutionary Algorithm in Structural Health Monitoring. Applied Sciences, 10(21), 7710. https://doi.org/10.3390/app10217710