Inducing Damage Diagnosis Capabilities in Carbon Fiber Reinforced Polymer Composites by Magnetoelastic Sensor Integration via 3D Printing



Abstract
:
1. Introduction
2. Materials and Methods
2.1. Slab Preparation by 3D Printing
2.2. Experimental Procedures
- O1: That meaningful (with respect to noise) electrical signals passively emitted from M-sensors could be generated/recorded, and
- O2: That the analysis of recorded signals could provide damage detection and assessment (diagnosis) results, especially at high amplitude/low frequency vibrating operation.
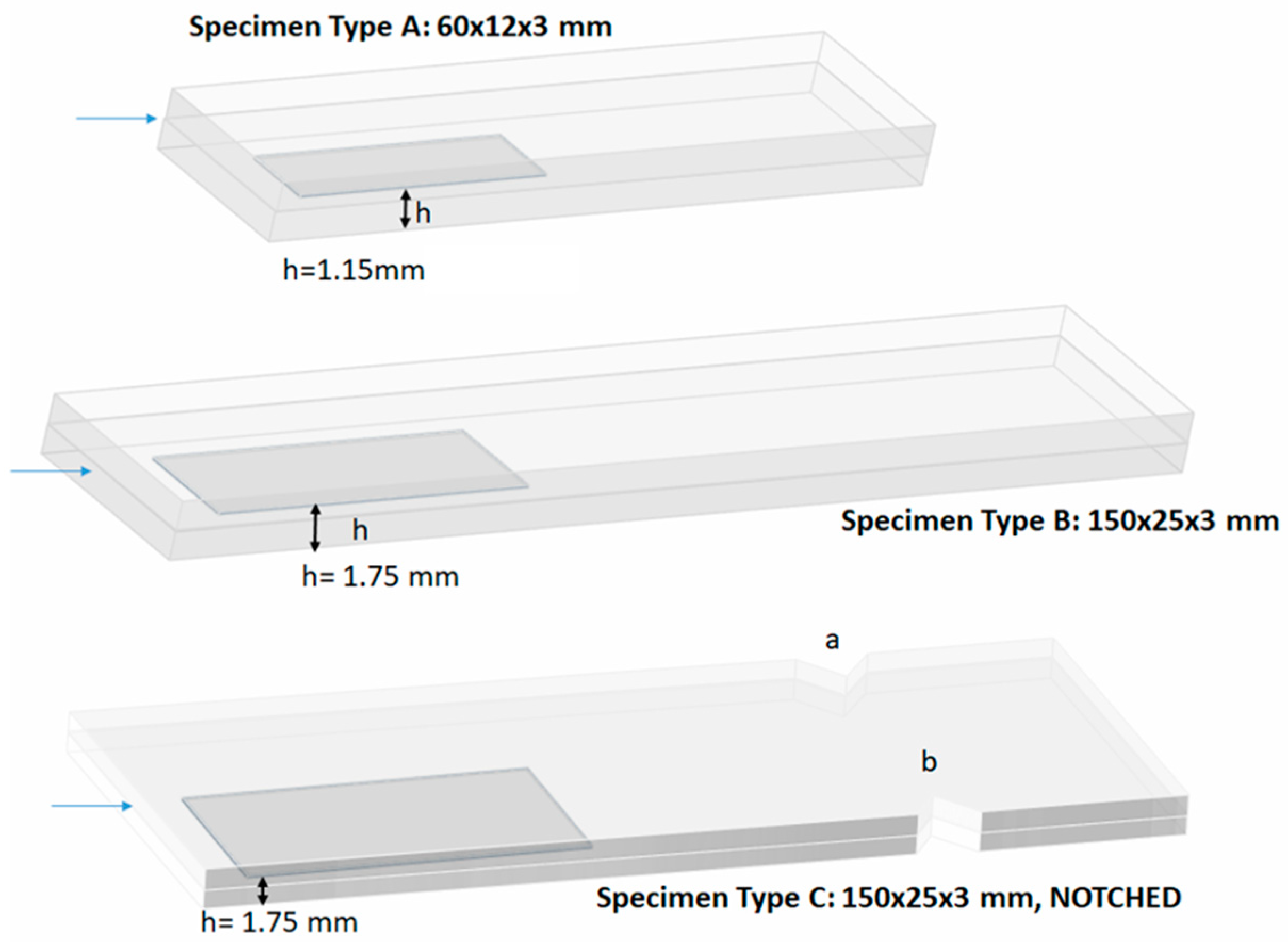
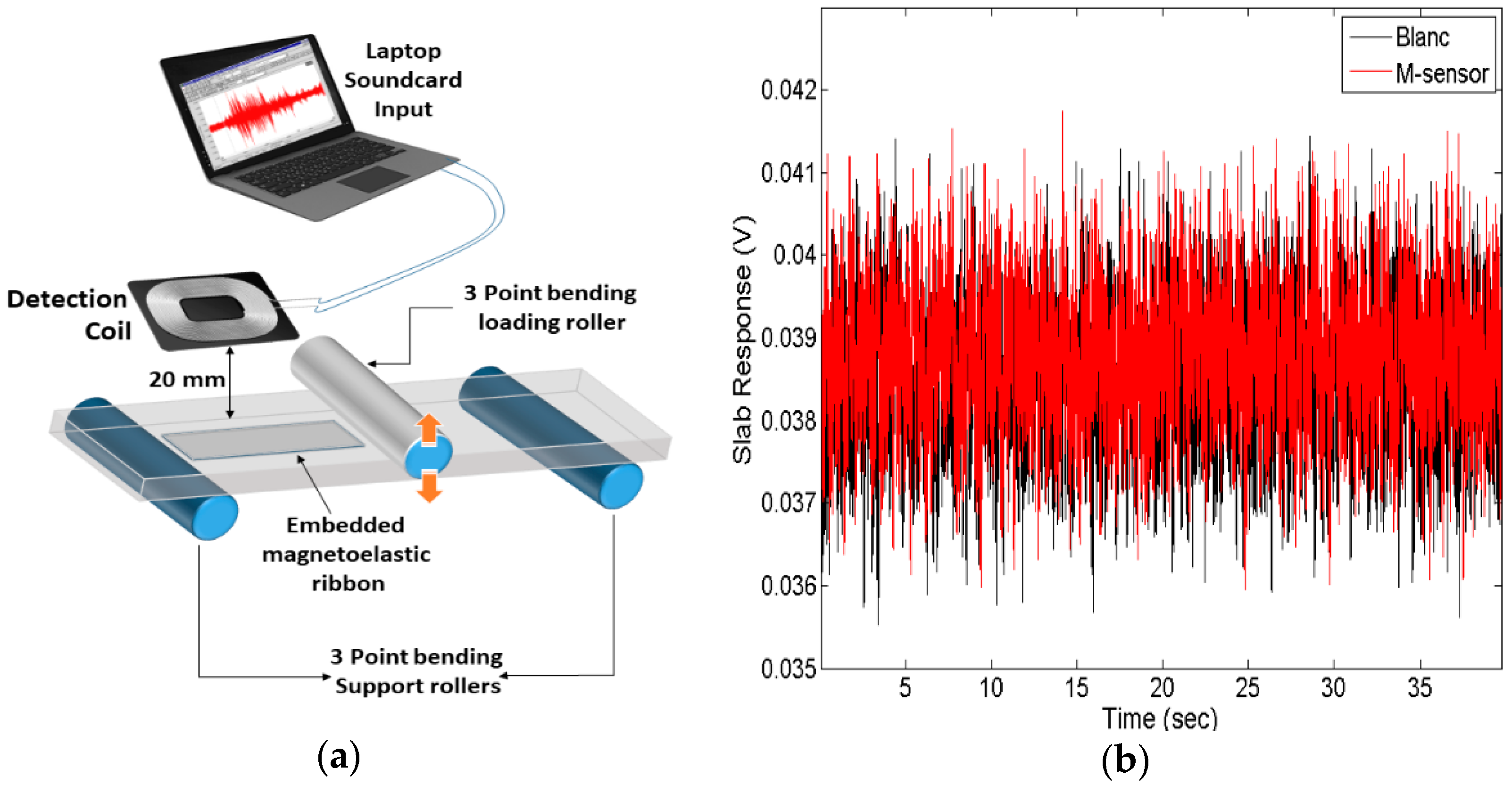
- P1: The procedure simulated high frequency and low amplitude operational conditions, typical of systems with fast dynamics and involved type-A slabs both in M-sensor and blanc (type-A blanc) forms. Testing was performed on a Dynamic Mechanical Analyzer (DMA Q800) of TA—Instruments (Figure 3), which led to choosing the specific dimensions of type-A slabs. Slabs were subjected to three-point dynamic bending under a linear frequency scan of 1–100 Hz @ RT and at v = 25 μm constant static deflection. Electrical signals created by induction to the remote interrogation coil (placed at 20 mm from the slab) were recorded by PioneerHill-Spectraplus© Software for Data Acquisition at 4096 Hz via a PC-Soundcard 3.5 mm jack. Comparing signals from type-A and -A blanc slabs allows for validating whether the hidden magnetoelastic material could provide sensing capabilities to the (otherwise passive) slab.
- P2: The procedure involved series of type-B and -C1, -C2 slabs, fixed as cantilevers (Figure 4). The free end suffered a load of quasi-sinusoidal form with frequency f = 4 Hz, mean value equal to 12.5 mm and amplitude d = 12.5 mm. In other words, the free end featured deflections between 0 and 25 mm, applied via a custom-built mechanical exciter, which allowed for using a (larger than type-A) size of type-B/-C1/-C2 slabs. Hence, low frequency and high amplitude operational conditions typical of systems (structures) with slow dynamics were simulated. Electrical signals created by induction to a low-cost interrogation coil (Vishay IWAS) placed at 20 mm from the vibrating slab’s end, were recorded via a conventional digital oscilloscope at 200 KHz. C comparing signals from pristine (type-B) or damaged (-C1, -C2) slabs should conclude on the existence of frequency shifts and ensure that damage diagnosis results could be obtained using the M-sensor concept.
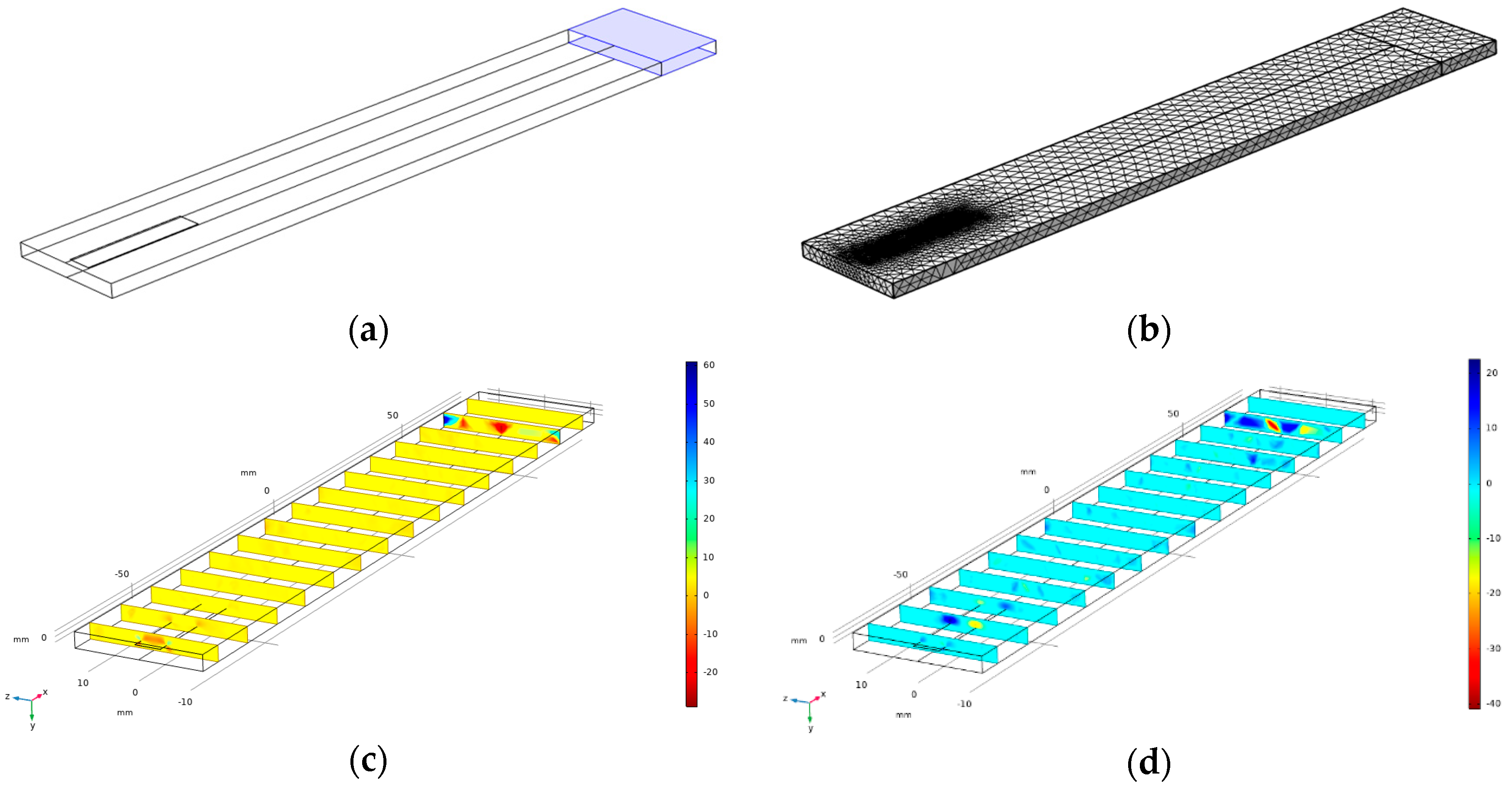
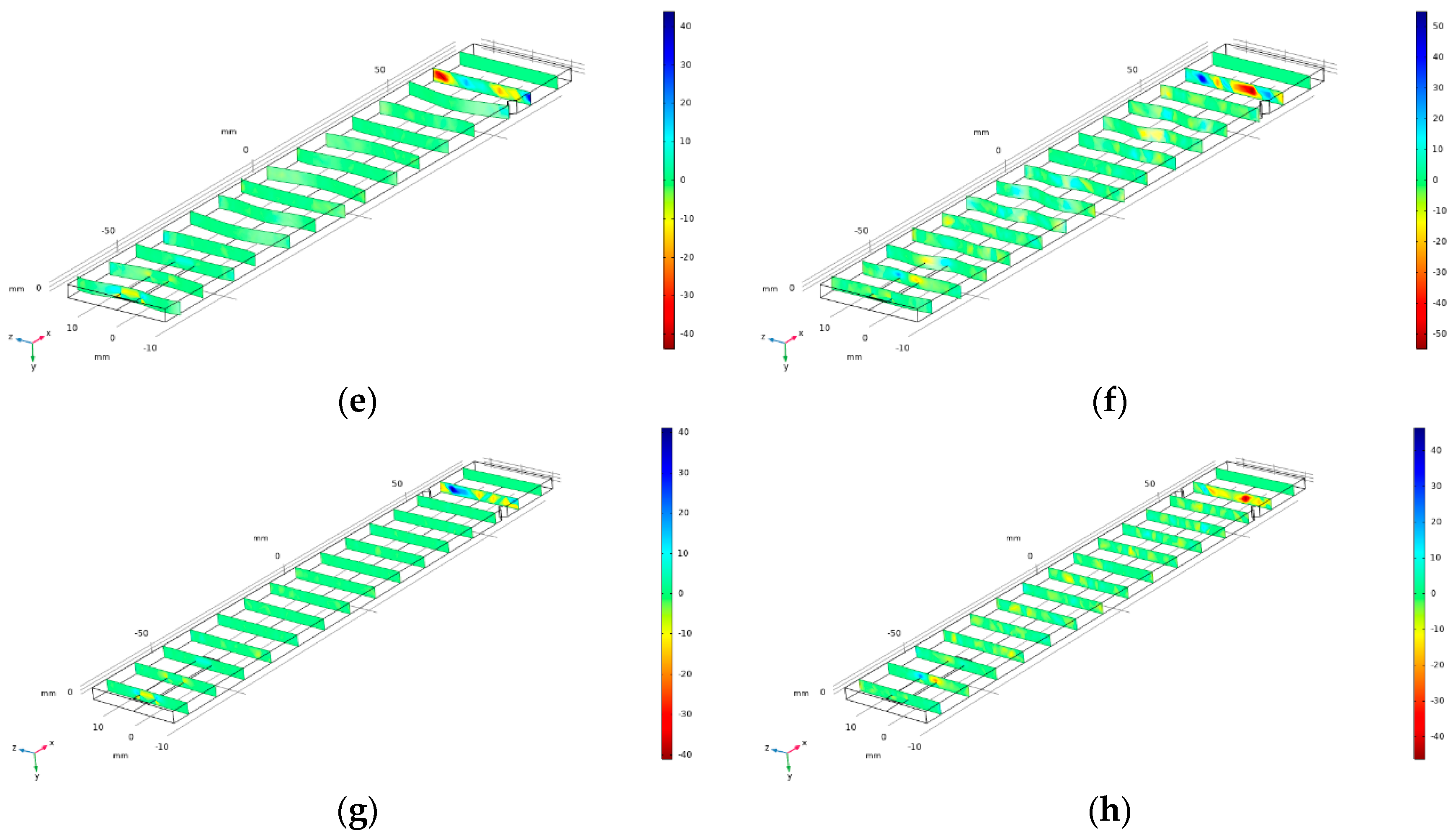
2.3. Finite Element Method Analysis
3. Experimental Results and Analysis
3.1. Testing for Meaningful Signals with Respect to Noise (O1)
3.2. Testing for Damage Detection Capabilities (O2)
3.3. Testing for Damage Assessment (O2)
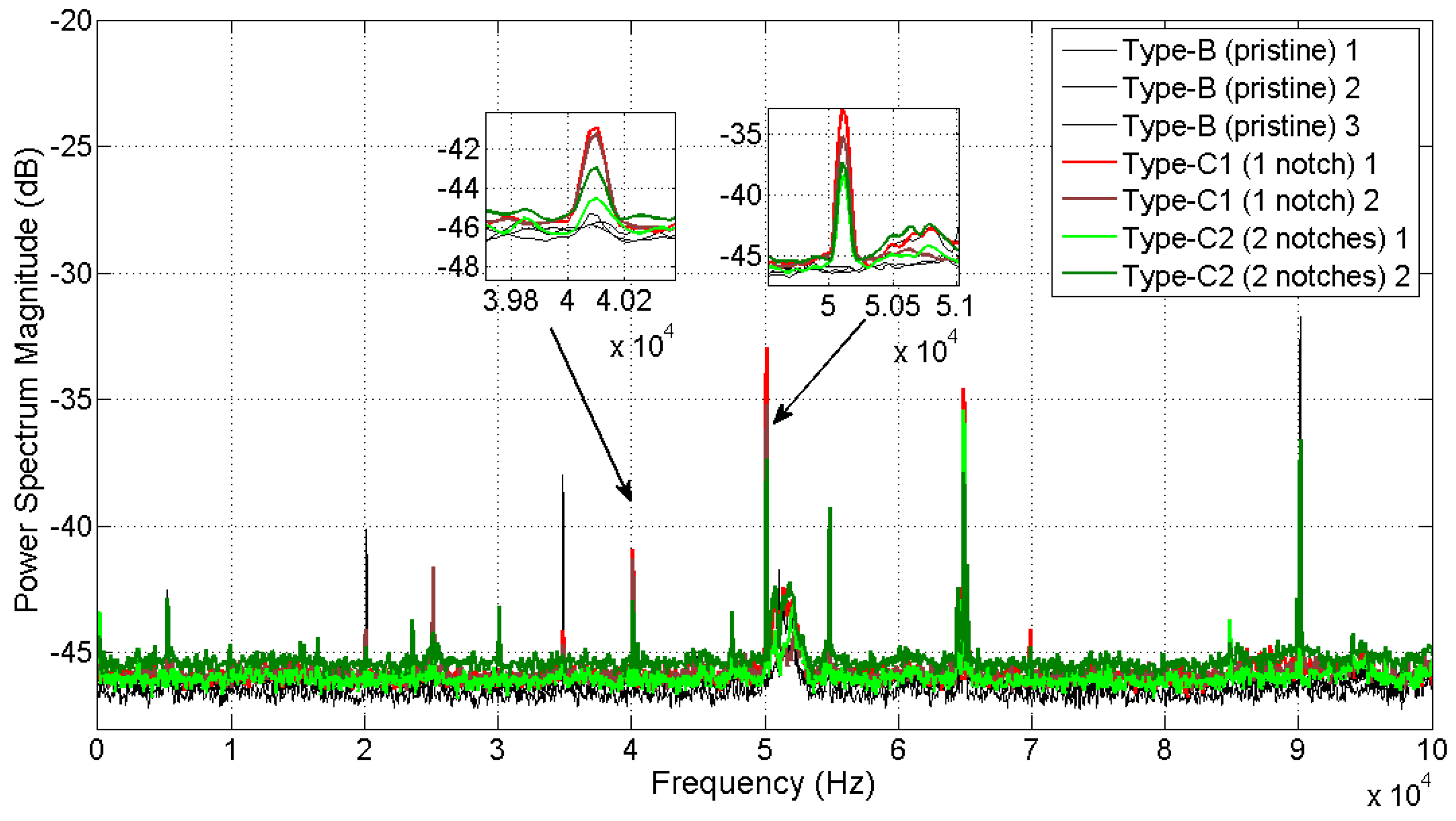
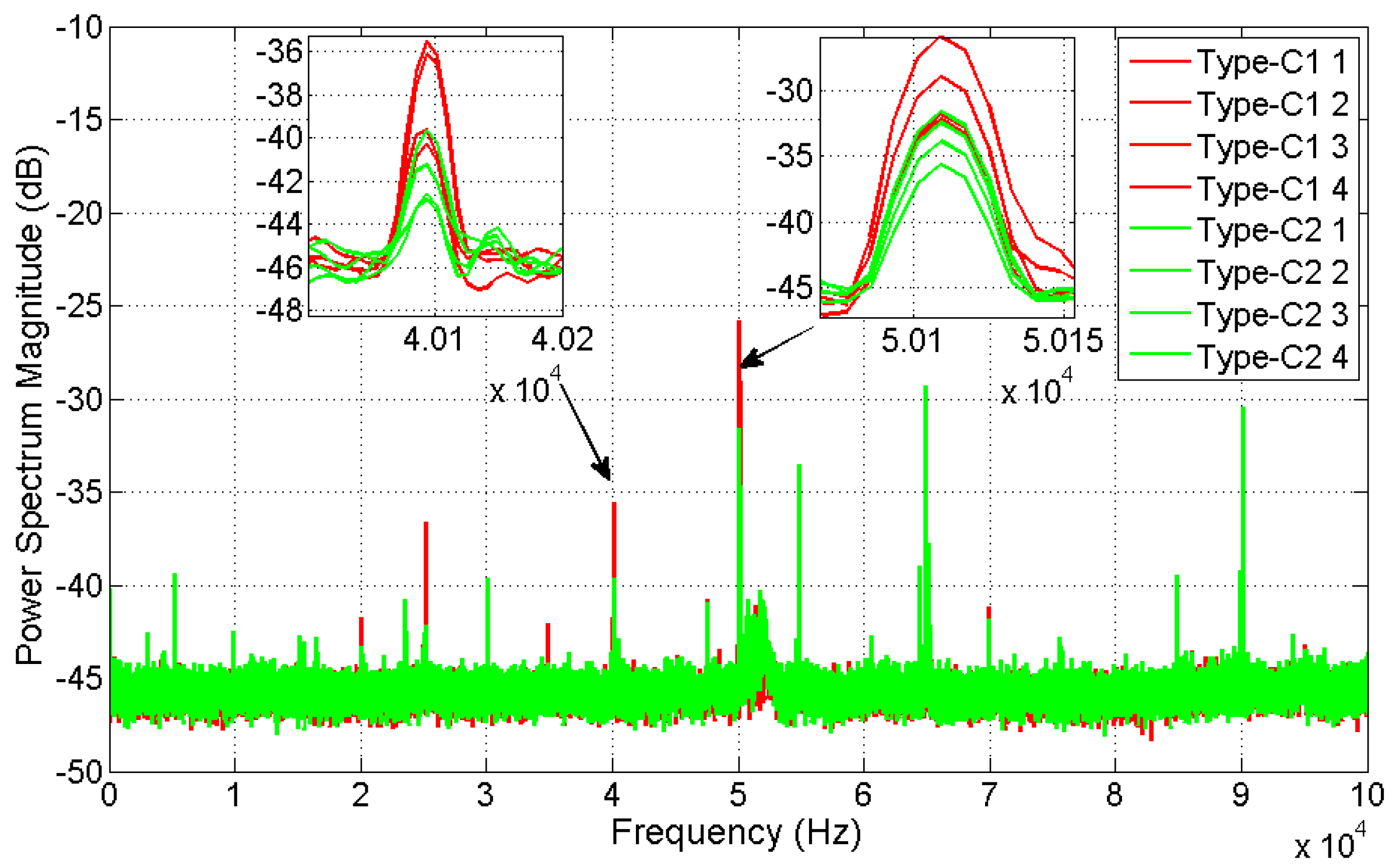
- Response signals recorded by testing each -C1 or -C2 slab using procedure P2 were treated as stochastic time-series sequences. This was quite realistic, since the recorded signals had considerable noise due to electromagnetic parasitic phenomena related to the contact-less recording principle. Furthermore, given that damage may be assessed by means of two frequency regions (around 40,000 and 50,000 Hz), it was beneficial to perform high-pass filtering of the raw signals, allowing for a lower number of frequency components to be modeled. One simple means of doing so, was by differencing the raw signals (that is, forming the differences of each signal value at instant t minus that at t − 1 for all t) as many times as necessary for effectively undermining lower frequency (below 40 KHz) components. Naturally, a traditional high pass filter may also be applied. Here, the raw signals recorded from testing with -C1 and -C2 slabs (with their spectral characteristics shown in Figure 9) were differenced six times, for obtaining signals with insignificant frequency content below 40 KHz.
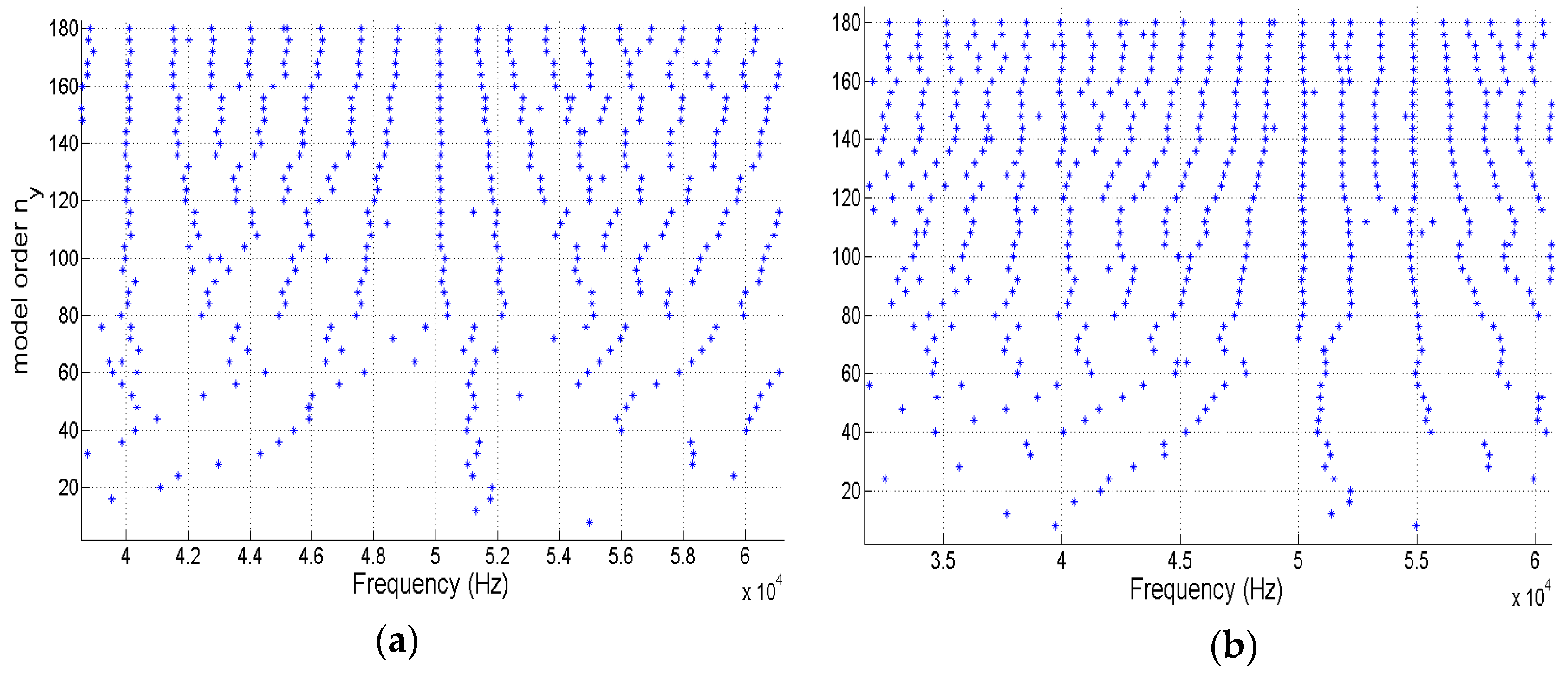
- Each signal was modeled by means of stochastic output–only AutoRegressive representations with constant coefficients (CC-AR), identified via standard algorithms. These may be coded in various programming languages, or even be found in software packages such as MATLAB®.
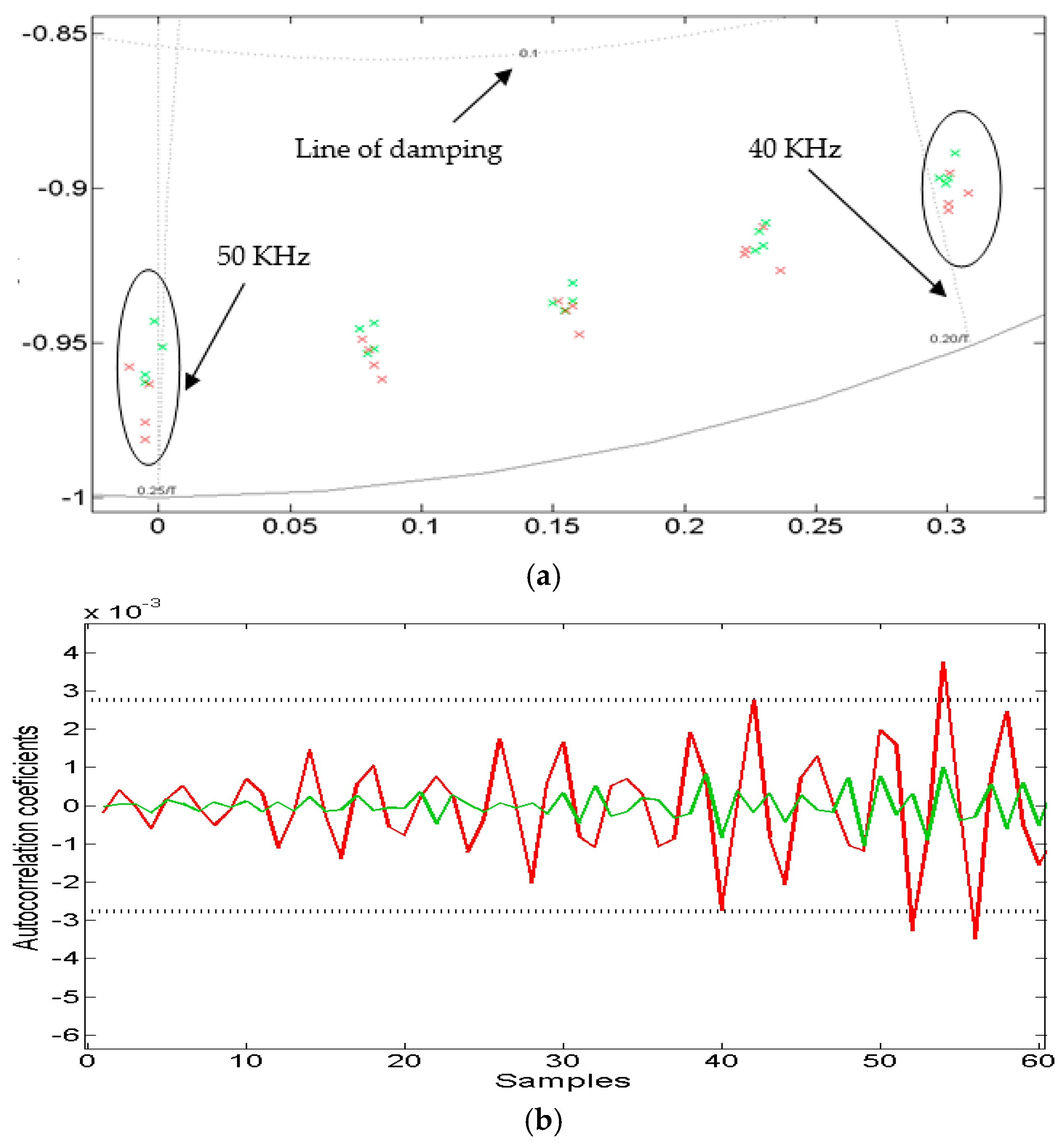
- For each identified AR representation, poles at 40 and 50 KHz were monitored with respect to their damping. Characteristic changes in damping values (at these frequencies) between different data sets lead to damage assessment conclusions about the slabs generating these data.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AR | autoregressive representation (model) |
| CC-AR | autoregressive representation with constant coefficients (model) |
| CFRP | carbon fiber reinforced polymer |
| DMA | dynamic mechanical analyzer |
| FBG | fiber bragg gratings |
| FEM | finite element method (model) |
| FDM | fused deposition modeling |
| Hz | Hertz |
| M-sensor | specimen with integrated magnetoelastic strip acting as integrated sensor |
| MFC | macro-fiber composite |
| MPa | mega Pascal |
| NID | Normally Independently Distributed |
| O1 | objective 1 (Section 2.2) |
| O2 | objective 2 (Section 2.2) |
| P1 | experimental procedure 1(Section 2.2) |
| P2 | experimental procedure 2(Section 2.2) |
| PC | personal computer |
| PET-G | polyethylene terephthalate glycol |
| PZT | piezoelectric transducer |
| type-A | slab of 60 × 12 × 3 mm3 with integrated Metglas® ribbon |
| type-B | slab of 150 × 25 × 3 mm3 with integrated Metglas® ribbon |
| type-C1 | slab of 150 × 25 × 3 mm3 with integrated Metglas® ribbon and one notch |
| type-C2 | slab of 150 × 25 × 3 mm3 with integrated Metglas® ribbon and two notches |
References
- Mouzakis, D.E. Advanced technologies in manufacturing 3D-layered structures for defense and aerospace. In Lamination: Theory and Application; Intechopen: London, UK, 2018; Volume 5, pp. 571–596. [Google Scholar]
- Khoo, Z.X.; Teoh, J.E.M.; Liu, Y.; Chua, C.K.; Yang, S.; An, J.; Leong, K.F.; Yeong, W.Y. 3D printing of smart materials: A review on recent progresses in 4D printing. Virt. Phys. Prototyp. 2015, 10, 103–122. [Google Scholar] [CrossRef]
- Ota, H.; Emaminejad, S.; Gao, Y.; Zhao, A.; Wu, E.; Challa, S.; Chen, K.; Fahad, H.M.; Jha, A.K.; Kiriya, D.; et al. Application of 3D printing for smart objects with embedded electronic sensors and systems. Adv. Mater. Technol. 2016, 1, 1600013. [Google Scholar] [CrossRef] [Green Version]
- Ni, Y.; Ji, R.; Long, K.; Bu, T.; Chen, K.; Zhuang, S. A review of 3D-printed sensors. Appl. Spectroc. Rev. 2017, 52, 623–652. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, X.; Guo, X.; Kong, B.; Zhang, M.; Qian, X.; Mi, S.; Sun, W. The Boom in 3D-Printed Sensor Technology. Sensors 2017, 17, 1166. [Google Scholar] [CrossRef]
- Willis, K.; Brockmeyer, E.; Hudson, S.; Poupyrevet, I. Printed optics: 3D printing of embedded optical elements for interactive devices. In Proceedings of the 25th annual ACM symposium on User interface software and technology (UIST ‘12), Cambridge, MA, USA, 7–10 October 2012. [Google Scholar]
- Shemelya, C.; Cedillos, F.; Aguilera, E.; Maestas, E.; Ramos, J.; Espalin, D.; Muse, D.; Wicker, R.; MacDonald, E. 3D printed capacitive sensors. In Proceedings of the Sensors, 2013 IEEE, Baltimore, MD, USA, 3–6 October 2013; pp. 1–4. [Google Scholar]
- Shemelya, C.; Cedillos, F.; Aguilera, E.; Espalin, D.; Muse, D.; Wicker, R.; MacDonald, E. Encapsulated copper wire and copper mesh capacitive sensing for 3-D printing applications. IEEE Sens. J. 2015, 15, 1280–1286. [Google Scholar] [CrossRef]
- Muth, J.T.; Vogt, D.M.; Truby, R.L. Embedded 3D Printing of Strain Sensors within Highly Stretchable Elastomers. Adv. Mater. 2014, 26, 6307–6312. [Google Scholar] [CrossRef]
- Agarwala, S.; Goh, G.L.; Yap, Y.L.; Goh, G.D.; Yu, H.; Yeong, W.Y.; Tran, T. Development of bendable strain sensor with embedded microchannels using 3D printing. Sens. Actuators A Phys. 2017, 263, 593–599. [Google Scholar] [CrossRef]
- Christ, J.F.; Aliheidari, N.; Ameli, A.; Pötschke, P. 3D printed highly elastic strain sensors of multiwalled carbon nanotube/thermoplastic polyurethane nanocomposites. Mater. Des. 2017, 131, 394–401. [Google Scholar] [CrossRef]
- Huber, C.; Abert, C.; Bruckner, F.; Groenefeld, M.; Muthsam, O.; Schuschnigg, S.; Sirak, K.; Thanhoffer, R.; Teliban, I.; Vogler, C.; et al. 3D print of polymer bonded rare-earth magnets, and 3D magnetic field scanning with an end-user 3D printer. J. Appl. Phys. Lett. 2016, 109, 162401. [Google Scholar] [CrossRef]
- Na, S.M.; Park, J.J.; Jones, N.J.; Werely, N.; Flatau, A.B. Magnetostrictive whisker sensor application of carbon fiber-alfenol composites. Smart Mater. Struct. 2018, 27, 105010. [Google Scholar] [CrossRef]
- Chatzipirpiridis, G.; Erne, P.; Ergeneman, O.; Pane, S.; Nelson, B.J. A magnetic force sensor on a catheter tip for minimally invasive surgery. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar]
- Lee, H.B.; Kim, Y.W.; Yoon, J.; Lee, N.K.; Park, S.-H. 3D customized and flexible tactile sensor using a piezoelectric nanofiber mat and sandwich-molded elastomer sheets. Smart Mater. Struct. 2017, 26, 045032. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, skin-mountable and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Kong, Q.; Fan, S.; Bai, X.; Mo, Y.L.; Song, G. A novel embeddable spherical smart aggregate for structural health monitoring: Part I. Fabrication and electrical characterization. Smart Mater. Struct. 2017, 26, 095050. [Google Scholar] [CrossRef]
- Bocherens, E.; Bourasseau, S.; Dewynter-Marty, V.; Py, S.; Dupont, M.; Ferdinand, P.; Berenger, H. Damage detection in a radome sandwich material with embedded fiber optic sensors. Smart Mater. Struct. 2000, 9, 310. [Google Scholar] [CrossRef]
- Ding, G.; Cao, H.; Xie, C. Multipoint cure monitoring of temperature and strain of carbon fibre-reinforced plastic shafts using fibre Bragg grating sensors. Nondestruct. Test. Eval. 2019, 34, 117–134. [Google Scholar] [CrossRef]
- Chang, S.W.; Lin, T.K.; Kuo, S.Y.; Huang, T.-H. Integration of high-resolution laser displacement sensors and 3D printing for structural health monitoring. Sensors (Basel) 2018, 18, 19. [Google Scholar] [CrossRef] [Green Version]
- Mouzakis, D.E.; Dimogianopoulos, D.G. Magnetoelastic metglas® sensors: Application of wireless detection principle and stochastic nonlinear modelling for damage diagnosis in smart systems. In Glass Materials Research Progress; Wolf, J.C., Lange, L., Eds.; Nova Science Publishers: New York, NY, USA, 2008; pp. 225–257. [Google Scholar]
- Yang, Y.; Liu, H.; Annamdas, V.G.M.; Soh, C.K. Monitoring damage propagation using PZT impedance transducers. Smart Mater. Struct. 2009, 18, 045003. [Google Scholar] [CrossRef]
- De Medeiros, R.; Sartorato, M.; Vandepitte, D.; Tita, V. A comparative assessment of different frequency based damage detection in unidirectional composite plates using MFC sensors. J. Sound Vib. 2016, 383, 171–190. [Google Scholar] [CrossRef]
- Ogawa, M.; Huang, C.; Nakamura, T. Damage detection of CFRP laminates via self-sensing fibres and thermal-sprayed electrodes. Nondestruct. Test. Eval. 2013, 28, 1–16. [Google Scholar] [CrossRef]
- Khammassi, M.; Wali, R.; Al-Mutory, A.; Yousaf, A.; Sassi, S.; Gharib, M. Simplified modal-based method to quantify delamination in carbon fibre-reinforced plastic beam. Nondestruct. Test. Eval. 2019, 34, 283–298. [Google Scholar] [CrossRef]
- Samourgkanidis, G.; Kouzoudis, D.A. Pattern matching identification method of notchs on cantilever beams through their bending modes measured by magnetoelastic sensors. Theor. Appl. Fract. Mech. 2019, 103, 102266. [Google Scholar] [CrossRef]
- Landau, L.D.; Lifshitz, E.M. Mechanics, 3rd ed.; Elsevier, Butterworth-Heinenann: Oxford, UK, 1981. [Google Scholar]
- Rao, S.S. Mechanical Vibrations, 5th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2011. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FEM Eigenfrequencies in Hz for Indicated Slab: (I) | Power Spectra Eigenfrequencies in Hz for Indicated Slab: (II) | Absolute Value of % Error: abs{(I)-(II)}/(I) | ||||||
|---|---|---|---|---|---|---|---|---|
| -B | -C1 | -C2 | -B | -C1 | -C2 | -B | -C1 | -C2 |
| 4982.4 | 4986.9 | 5158.5 | 5235 | 5230 | 5233 | 5 | 5 | 1.4 |
| 20,389 | 20,373 | 19,985 | 20,142 | 20,140 | 20,140 | 1.2 | 1.1 | 0.8 |
| 34,804 | 34,798 | 35,257 | 34,868 | 34,865 | 34,868 | 0.2 | 0.2 | 1.1 |
| 47,402 | 47,253 | 47,017 | 47,553 | 47,555 | 47,555 | 0.3 | 0.6 | 1.1 |
| 65,038 | 65,007 | 65,061 | 64,898 | 64,900 | 64,895 | 0.2 | 0.2 | 0.3 |
| 89,994 | 90,038 | 90,064 | 90,135 | 90,133 | 90,133 | 0.2 | 0.2 | 0.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dimogianopoulos, D.G.; Charitidis, P.J.; Mouzakis, D.E. Inducing Damage Diagnosis Capabilities in Carbon Fiber Reinforced Polymer Composites by Magnetoelastic Sensor Integration via 3D Printing. Appl. Sci. 2020, 10, 1029. https://doi.org/10.3390/app10031029
Dimogianopoulos DG, Charitidis PJ, Mouzakis DE. Inducing Damage Diagnosis Capabilities in Carbon Fiber Reinforced Polymer Composites by Magnetoelastic Sensor Integration via 3D Printing. Applied Sciences. 2020; 10(3):1029. https://doi.org/10.3390/app10031029
Chicago/Turabian StyleDimogianopoulos, Dimitrios G., Panagiotis J. Charitidis, and Dionysios E. Mouzakis. 2020. "Inducing Damage Diagnosis Capabilities in Carbon Fiber Reinforced Polymer Composites by Magnetoelastic Sensor Integration via 3D Printing" Applied Sciences 10, no. 3: 1029. https://doi.org/10.3390/app10031029