
The Fault Ride-Through Characteristics of a Double-Fed Induction Generator Using a Dynamic Voltage Restorer with Superconducting Magnetic Energy Storage


Abstract
:1. Introduction
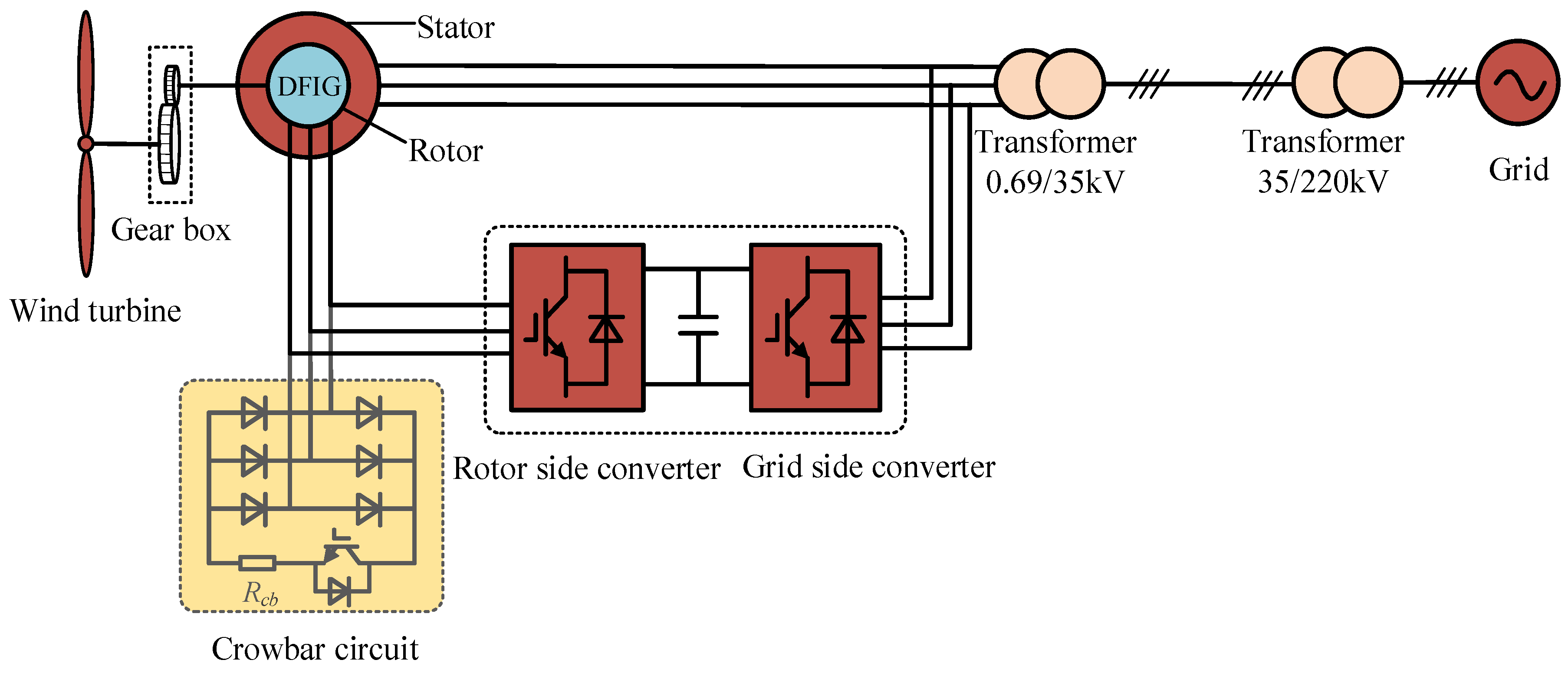
2. DFIG-Based Wind Turbine System
2.1. Working Principle of the DFIG-Based Wind Turbine System
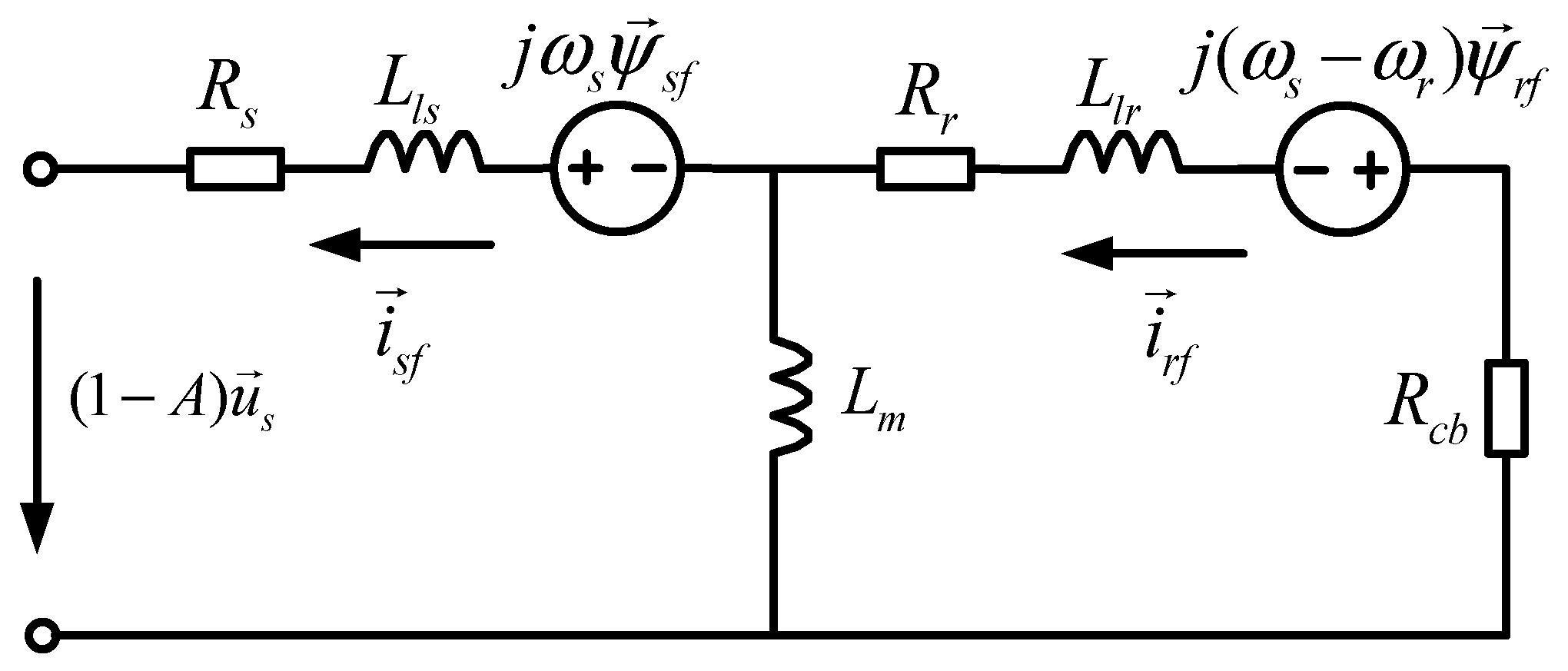
2.2. Modeling of the DFIG
2.3. Fault Characteristics of DFIG
2.3.1. Crowbar Circuit
2.3.2. Fault Current of the DFIG
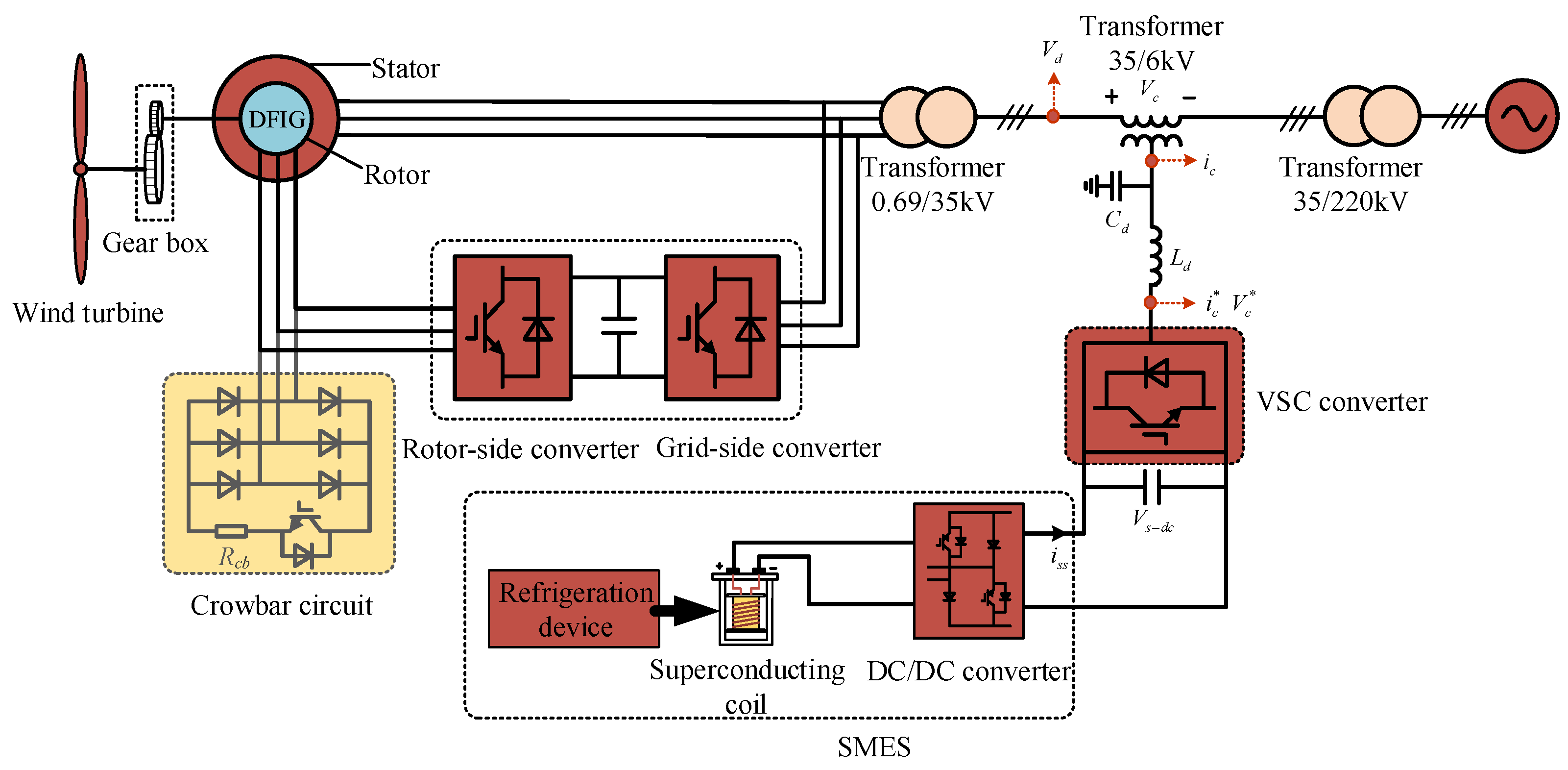
3. DFIG System with DVR-Based SMES
3.1. Control Strategy of the VSC Converter
3.2. The Control Strategy of the DC/DC Converter
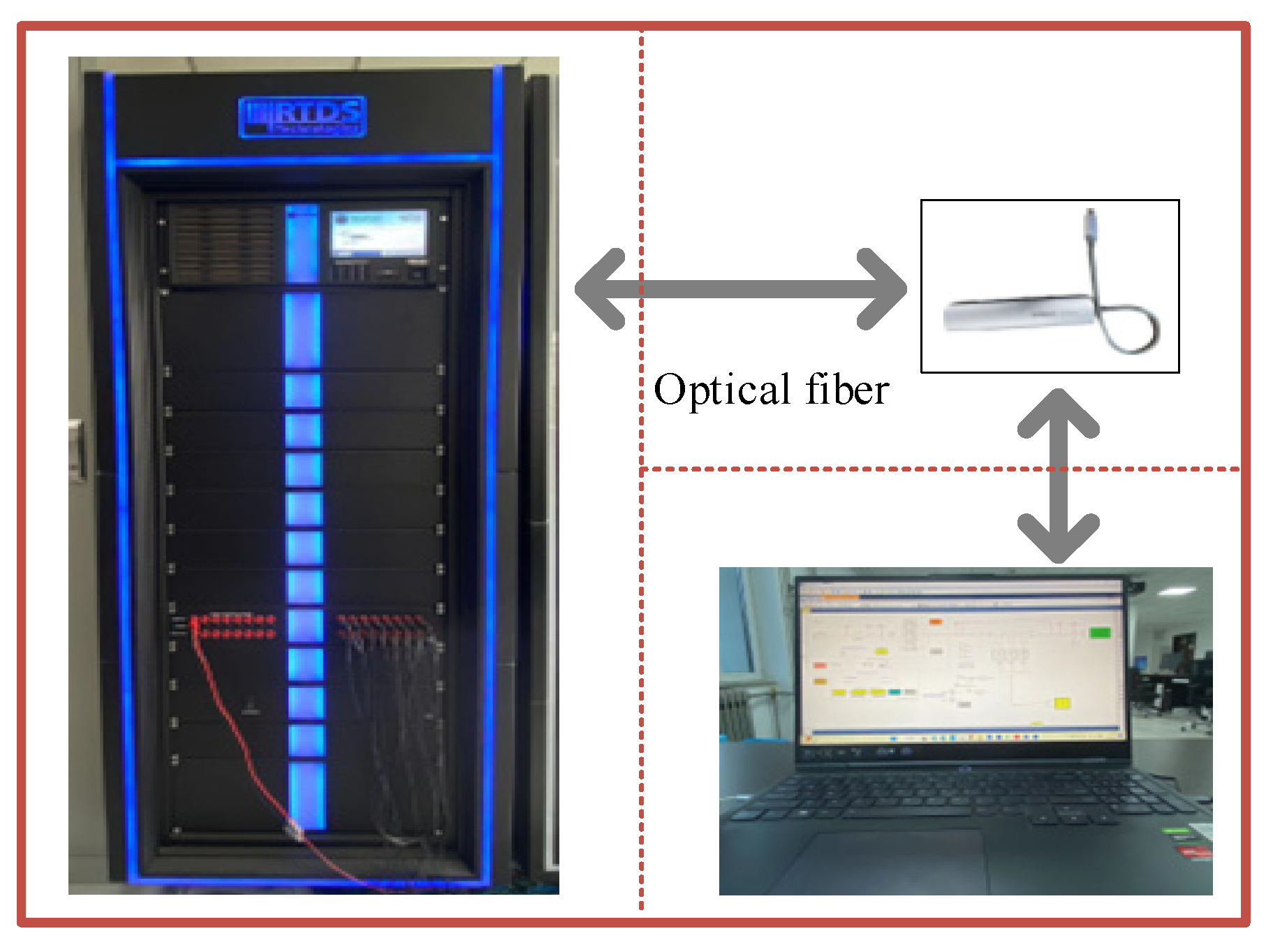
4. Simulation and Analysis
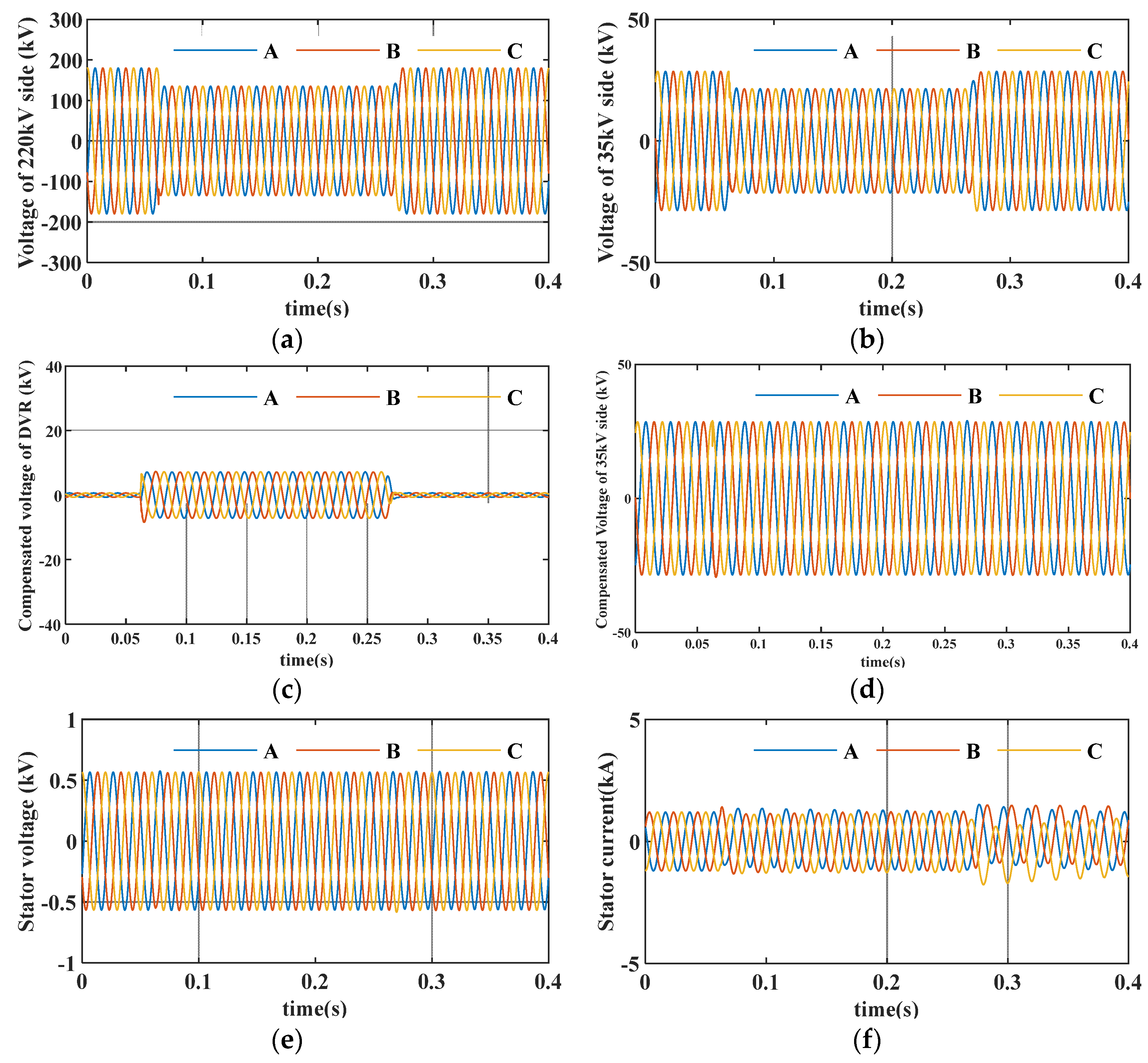
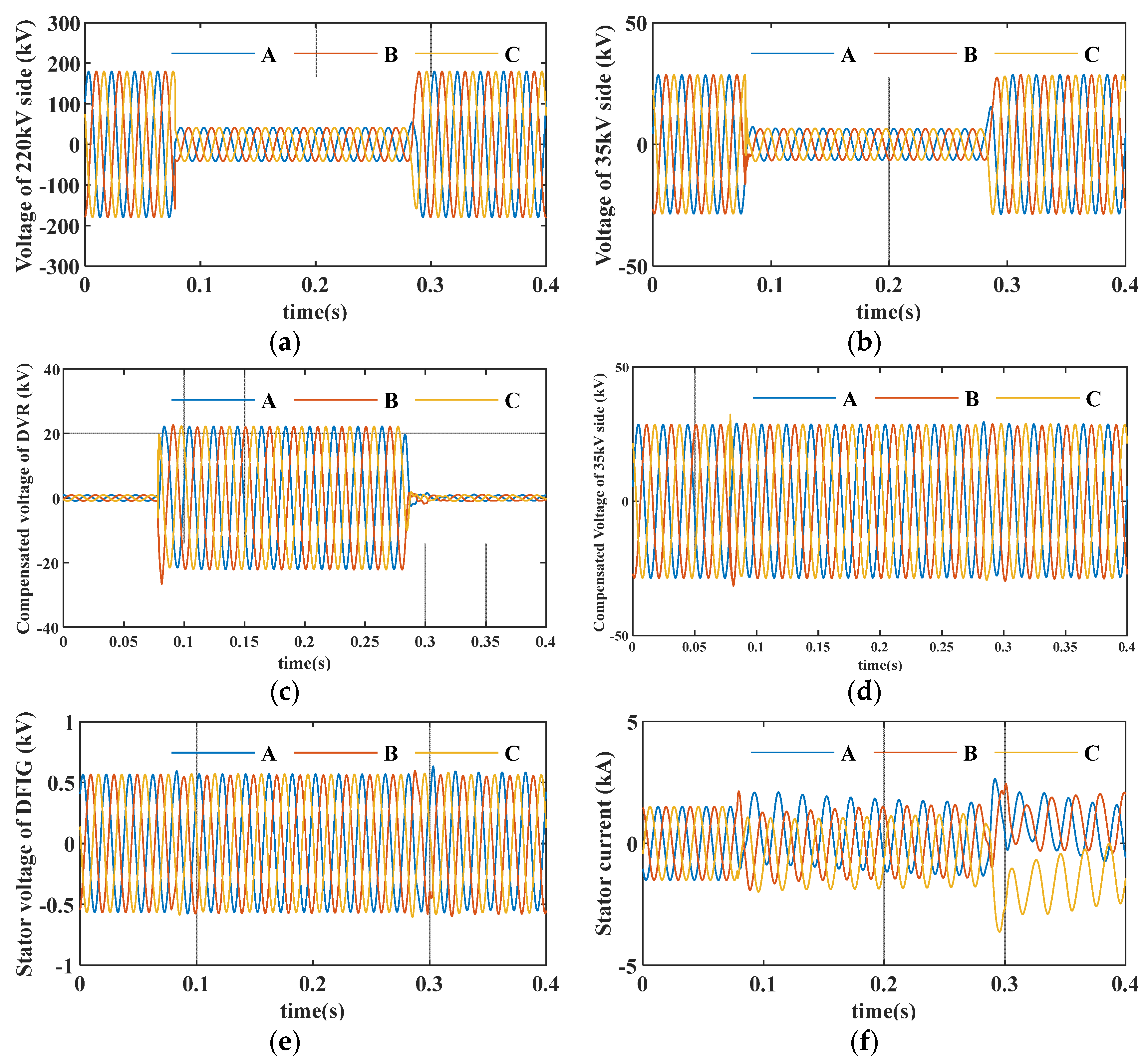
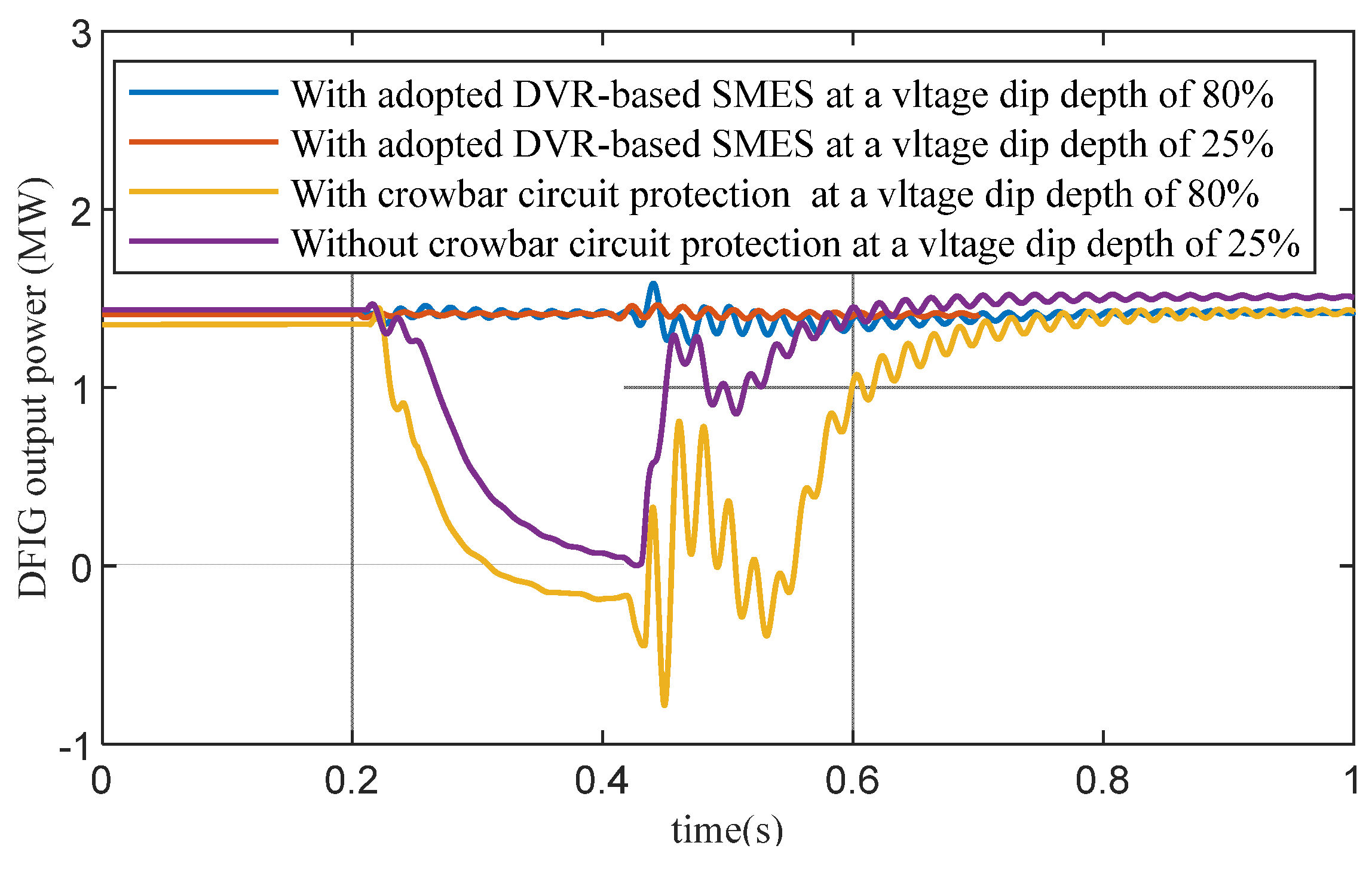
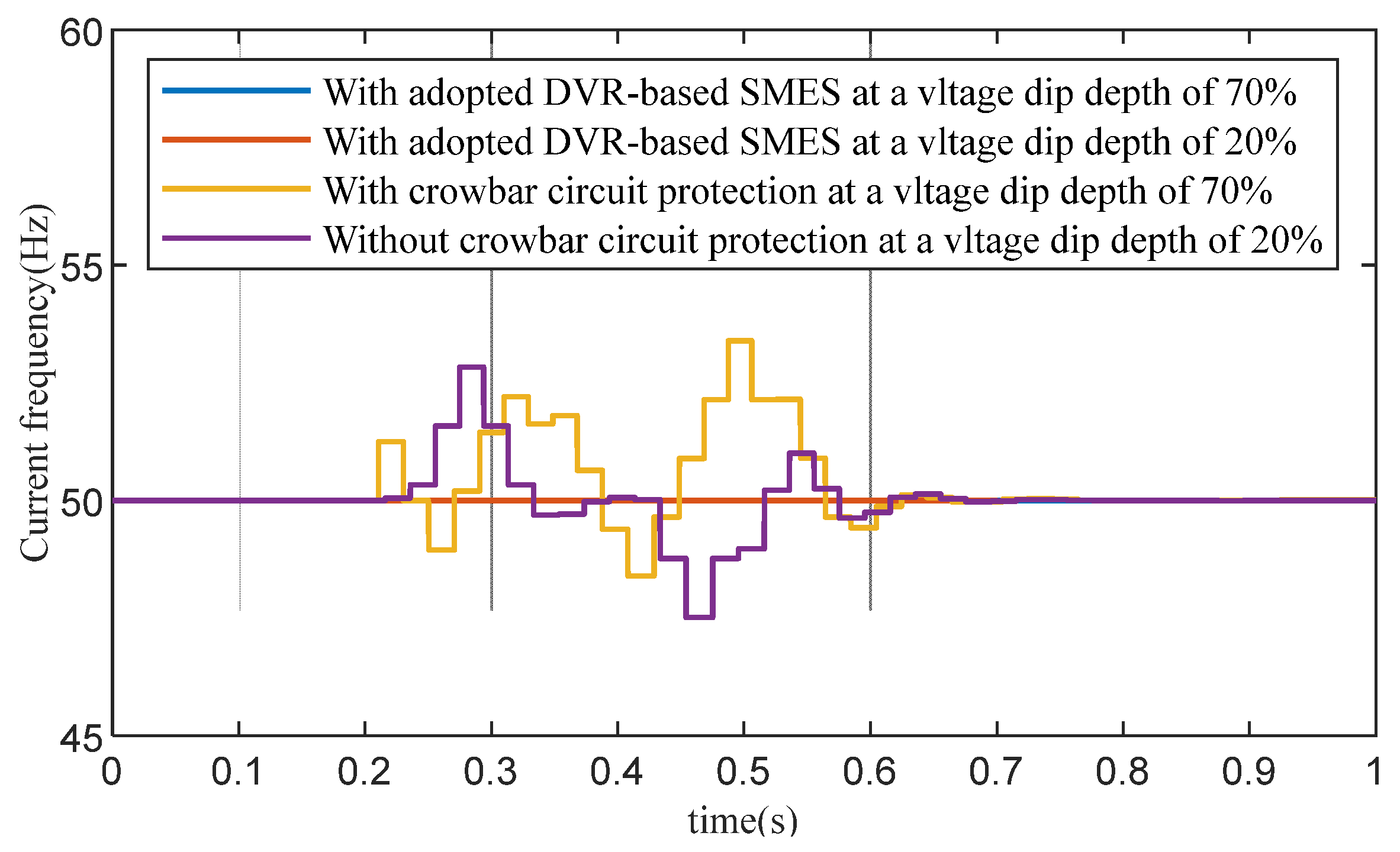
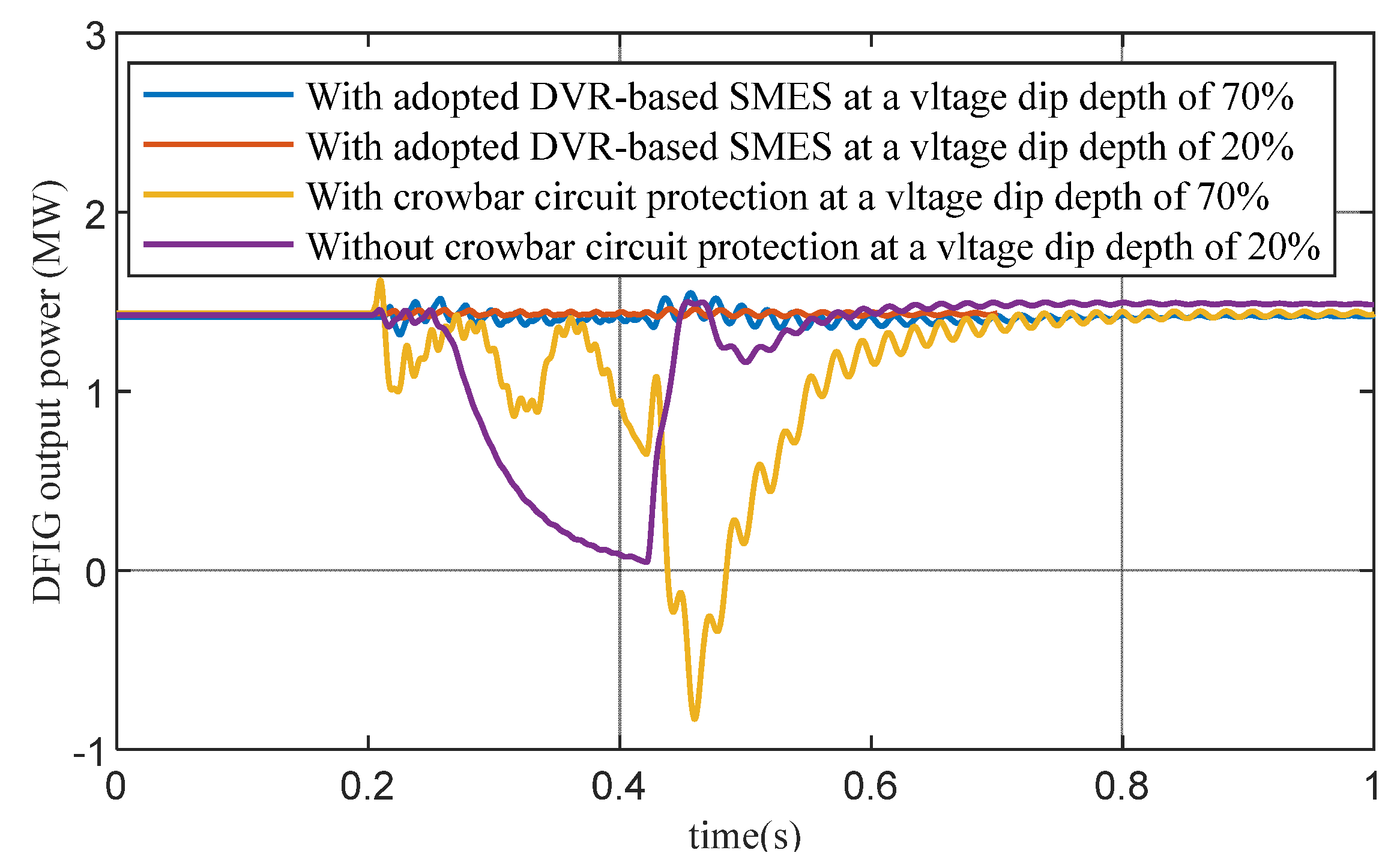
4.1. Three-Phase-to-Ground Fault
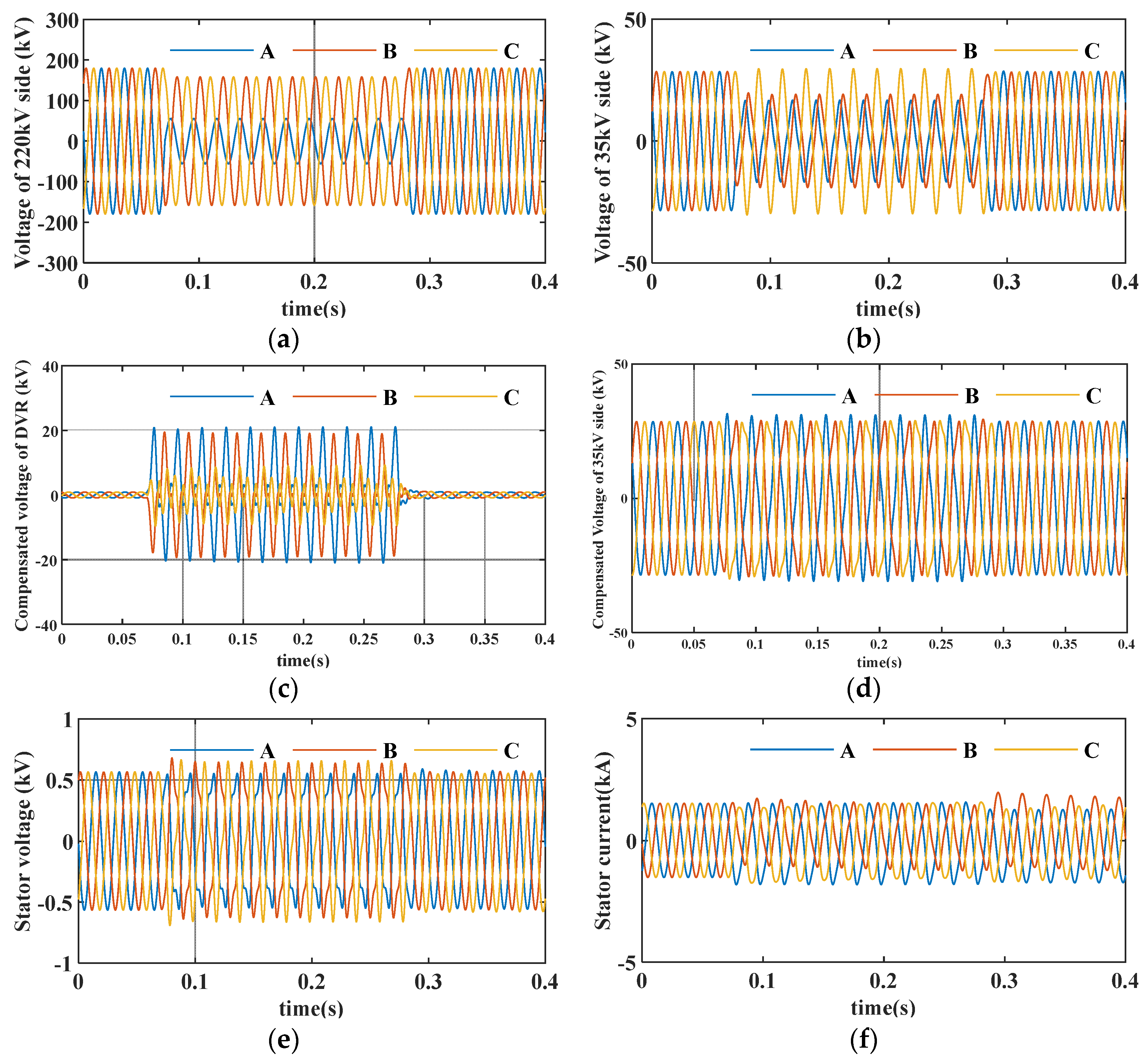
4.2. Single Phase-to-Ground Fault
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DFIG | Double-fed induction generator |
| DVR | Dynamic voltage restorer |
| SMES | Superconducting magnetic energy storage |
| RTDS | Real-time digital simulator |
| RSC | Rotor side converter |
| VSC | Voltage source converter |
| GSC | Grid side converter |
References
- Papadis, E.; Tsatsaronis, G. Challenges in the decarbonization of the energy sector. Energy 2020, 205, 118025. [Google Scholar] [CrossRef]
- Yu, B.; Fang, D.; Xiao, K.; Pan, Y. Drivers of renewable energy penetration and its role in power sector’s deep decarbonization towards carbon peak. Renew. Sustain. Energy Rev. 2023, 178, 113247. [Google Scholar] [CrossRef]
- Rissman, J.; Bataille, C.; Masanet, E.; Aden, N.; Morrow, W.R.; Zhou, N.; Elliott, N.; Dell, R.; Heeren, N.; Huckestein, B.; et al. Technologies and policies to decarbonize global industry: Review and assessment of mitigation drivers through 2070. Appl. Energy 2020, 266, 114848. [Google Scholar] [CrossRef]
- Abdmouleh, Z.; Gastli, A.; Ben-Brahim, L.; Haouari, M.; Al-Emadi, N.A. Review of optimization techniques applied for the integration of distributed generation from renewable energy sources. Renew. Energy 2017, 113, 266–280. [Google Scholar] [CrossRef]
- Abhinav, R.; Pindoriya, N.M. Opportunities and key challenges for wind energy trading with high penetration in Indian power market. Energy Sustain. Dev. 2018, 47, 53–61. [Google Scholar] [CrossRef]
- Dupré la Tour, M.-A. Photovoltaic and wind energy potential in Europe—A systematic review. Renew. Sustain. Energy Rev. 2023, 179, 113189. [Google Scholar] [CrossRef]
- Mousavi, Y.; Bevan, G.; Kucukdemiral, I.B.; Fekih, A. Sliding mode control of wind energy conversion systems: Trends and applications. Renew. Sustain. Energy Rev. 2022, 167, 112734. [Google Scholar] [CrossRef]
- Saeed, M.A.; Khan, H.M.; Ashraf, A.; Qureshi, S.A. Analyzing effectiveness of LVRT techniques for DFIG wind turbine system and implementation of hybrid combination with control schemes. Renew. Sustain. Energy Rev. 2018, 81, 2487–2501. [Google Scholar] [CrossRef]
- Maheshwari, Z.; Kengne, K.; Bhat, O. A comprehensive review on wind turbine emulators. Renew. Sustain. Energy Rev. 2023, 180, 113297. [Google Scholar] [CrossRef]
- Hossain, M.; Ali, M.H. Future research directions for the wind turbine generator system. Renew. Sustain. Energy Rev. 2015, 49, 481–489. [Google Scholar] [CrossRef]
- Justo, J.J.; Mwasilu, F.; Jung, J.-W. Doubly-fed induction generator based wind turbines: A comprehensive review of fault ride-through strategies. Renew. Sustain. Energy Rev. 2015, 45, 447–467. [Google Scholar] [CrossRef]
- Sedighizadeh, M.; Yarmohammadi, H.; Esmaili, M. Enhancing FRT performance and smoothing output power of DFIG wind farm equipped by SFCL and SMES in a fuzzy framework. Eng. Sci. Technol. Int. J. 2019, 22, 801–810. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, B.; Fan, X. Asymmetrical Fault Ride-Through Control Strategy for Rotor-Side Converter of DFIG. IEEE Trans. Energy Convers. 2020, 35, 1046–1053. [Google Scholar] [CrossRef]
- Nian, H.; Jiao, Y. Improved Virtual Synchronous Generator Control of DFIG to Ride-Through Symmetrical Voltage Fault. IEEE Trans. Energy Convers. 2020, 35, 672–683. [Google Scholar] [CrossRef]
- Huang, Q.; Zou, X.; Zhu, D.; Kang, Y. Scaled Current Tracking Control for Doubly Fed Induction Generator to Ride-Through Serious Grid Faults. IEEE Trans. Power Electron. 2016, 31, 2150–2165. [Google Scholar] [CrossRef]
- Campos-Gaona, D.; Moreno-Goytia, E.L.; Anaya-Lara, O. Fault Ride-Through Improvement of DFIG-WT by Integrating a Two-Degrees-of-Freedom Internal Model Control. IEEE Trans. Ind. Electron. 2013, 60, 1133–1145. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Pan, W.; Rao, Y.; Li, C.; Liu, T.; Zhu, Z.; Zhang, Y. An Electromagnetic Transient Analysis Model for DFIG Considering LVRT Hardware Protection. IEEE Access 2021, 9, 32591–32598. [Google Scholar] [CrossRef]
- Haidar, A.M.A.; Muttaqi, K.M.; Hagh, M.T. A Coordinated Control Approach for DC link and Rotor Crowbars to Improve Fault Ride-Through of DFIG-Based Wind Turbine. IEEE Trans. Ind. Appl. 2017, 53, 4073–4086. [Google Scholar] [CrossRef]
- Xiao, F.; Xia, Y.; Zhang, K.; Zhang, Z.; Yin, X. Fault characteristics analysis of DFIGWT in whole LVRT process considering control strategy switching between RSC and Crowbar. Int. J. Electr. Power Energy Syst. 2023, 145, 108615. [Google Scholar] [CrossRef]
- Onishi, K.; Li, Y.; Koiwa, K.; Liu, F.; Zanma, T.; Liu, K.-Z. Analysis on the operation of crowbar in doubly fed induction generators. Electr. Power Syst. Res. 2023, 215, 108950. [Google Scholar] [CrossRef]
- Yang, S.; Zhou, T.; Sun, D.; Xie, Z.; Zhang, X. A SCR crowbar commutated with power converter for DFIG-based wind turbines. Int. J. Electr. Power Energy Syst. 2016, 81, 87–103. [Google Scholar] [CrossRef]
- Zou, Z.-C.; Xiao, X.-Y.; Liu, Y.-F.; Zhang, Y.; Wang, Y.-H. Integrated Protection of DFIG-Based Wind Turbine with a Resistive-Type SFCL Under Symmetrical and Asymmetrical Faults. IEEE Trans. Appl. Supercond. 2016, 26, 5603005. [Google Scholar] [CrossRef]
- Sheng, Y.; Li, C.; Jia, H.; Liu, B.; Coombs, T.A. Investigation on FRT Capability of PMSG-Based Offshore Wind Farm Using the SFCL. IEEE Trans. Appl. Supercond. 2021, 31, 5604704. [Google Scholar] [CrossRef]
- De Souza, V.R.F.B.; Barros, L.S.; Costa, F.B.; Junior, G.P.D. Doubly Fed Induction Generator Low Voltage Ride Through Improvement Through Modular Multilevel Converter. IEEE Access 2022, 10, 57914–57929. [Google Scholar] [CrossRef]
- Huang, P.-H.; El Moursi, M.S.; Hasen, S.A. Novel Fault Ride-Through Scheme and Control Strategy for Doubly Fed Induction Generator-Based Wind Turbine. IEEE Trans. Energy Convers. 2015, 30, 635–645. [Google Scholar] [CrossRef]
- Zou, X.; Zhu, D.; Hu, J.; Zhou, S.; Kang, Y. Mechanism Analysis of the Required Rotor Current and Voltage for DFIG-Based WTs to Ride-Through Severe Symmetrical Grid Faults. IEEE Trans. Power Electron. 2018, 33, 7300–7304. [Google Scholar] [CrossRef]
- Swain, S.; Ray, P.K. Short circuit fault analysis in a grid connected DFIG based wind energy system with active crowbar protection circuit for ridethrough capability and power quality improvement. Int. J. Electr. Power Energy Syst. 2017, 84, 64–75. [Google Scholar] [CrossRef]
- Lin, Y.; Tu, L.; Liu, H.; Li, W. Fault analysis of wind turbines in China. Renew. Sustain. Energy Rev. 2016, 55, 482–490. [Google Scholar] [CrossRef]
- Tian, X.; Chi, Y.; Wang, W.; Li, G.; Tang, H.; Wang, Z. Transient characteristics and adaptive fault ride through control strategy of DFIGs considering voltage phase angle jump. J. Mod. Power Syst. Clean Energy 2016, 5, 757–766. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Zhu, D.; Zou, X.; Kang, Y.; Guerrero, J.M. Transient Characteristics and Quantitative Analysis of Electromotive Force for DFIG-based Wind Turbines during Grid Faults. Chin. J. Electr. Eng. 2022, 8, 3–12. [Google Scholar] [CrossRef]
- Li, C.; Li, G.; Xin, Y.; Li, B. A direct current conversion device for closed HTS coil of superconducting magnetic energy storage. J. Energy Storage 2023, 62, 106845. [Google Scholar] [CrossRef]
- Li, G.; Li, C.; Xin, Y.; Hong, W.; Li, W.; Yang, T.; Li, B. Dynamic modelling methodology for an HTS energy converter using moving mesh. Supercond. Sci. Technol. 2021, 34, 105006. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DFIG Parameters | Value |
|---|---|
| Rated power | 2.5 MW |
| Rated voltage | 0.69 kV |
| Rated wind speed | 12 m/s |
| Rated frequency | 50 Hz |
| Stator resistance | 0.01 pu |
| Rotor resistance | 0.006 pu |
| Stator leakage reactance | 0.102 pu |
| Rotor leakage reactance | 0.08596 pu |
| Mutual inductance resistance | 4.348 pu |
| Turns ratio | 2.637 |
| Inertia constant | 1.5 |
| DC link voltage of DFIG | 1.2 kV |
| DVR Parameters | Value |
| Transformer voltage | 35/6 kV |
| Rated power | 2.5 MW |
| DC link voltage of DVR | 1.2 kV |
| DC link capacitor | 10,000 uF |
| The 0.69/35 kV Transformer | Value |
|---|---|
| Rated power | 2.5 MW |
| Winding resistance | 0.001 pu |
| Winding reactance | 0.1 pu |
| Transformer base frequency | 50 Hz |
| Magnetizing losses | 0.00001 pu |
| Transformer rating | 0.69/35 |
| The 35/6 kV Transformer | Value |
| Rated power | 2.5 MW |
| Leakage resistance | 0.001 pu |
| Leakage resistance | 0.05 pu |
| Transformer base frequency | 50 Hz |
| Transformer rating | 35/6 |
| The 35/220 kV Transformer | Value |
| Rated power | 2.5 MW |
| Leakage resistance | 0.001 pu |
| Leakage resistance | 0.1 pu |
| Transformer base frequency | 50 Hz |
| Transformer rating | 35/220 |
| DFIG Parameter | Value |
|---|---|
| Proportional factor Kp1 of PI1 | 20 |
| Integral factor Ti1 of PI1 | 0.01 |
| Proportional factor Kp2 of PI2 | 1 |
| Integral factor Ti2 of PI2 | 0.01 |
| Proportional factor Kp3 of PI3 | 5 |
| Integral factor Ti3 of PI3 | 0.02 |
| Proportional factor Kp4 of PI4 | 20 |
| Integral factor Ti4 of PI4 | 0.02 |
| Proportional factor Kp5 of PI5 | 2 |
| Integral factor Ti5 of PI5 | 0.01 |
| Proportional factor Kp6 of PI6 | 5 |
| Integral factor Ti6 of PI6 | 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Liang, Y.; Niu, J.; He, J.; Liu, H.; Li, B.; Li, C.; Cao, Y. The Fault Ride-Through Characteristics of a Double-Fed Induction Generator Using a Dynamic Voltage Restorer with Superconducting Magnetic Energy Storage. Appl. Sci. 2023, 13, 8180. https://doi.org/10.3390/app13148180
Li L, Liang Y, Niu J, He J, Liu H, Li B, Li C, Cao Y. The Fault Ride-Through Characteristics of a Double-Fed Induction Generator Using a Dynamic Voltage Restorer with Superconducting Magnetic Energy Storage. Applied Sciences. 2023; 13(14):8180. https://doi.org/10.3390/app13148180
Chicago/Turabian StyleLi, Lei, Yabo Liang, Jian Niu, Jianan He, Haitao Liu, Bin Li, Chao Li, and Yunzhu Cao. 2023. "The Fault Ride-Through Characteristics of a Double-Fed Induction Generator Using a Dynamic Voltage Restorer with Superconducting Magnetic Energy Storage" Applied Sciences 13, no. 14: 8180. https://doi.org/10.3390/app13148180