
Application of Vehicle-Based Indirect Structural Health Monitoring Method to Railway Bridges—Simulation and In Situ Test
 , , ,
, , ,
Abstract
:1. Introduction
2. Dynamic Modeling of Bridge Structure and Crossing Train
2.1. Mechanical Model of the Bridge Structure
2.2. Mechanical Model of Train
3. Dynamic Calculation of Bridge and Train Vibrations
3.1. Analyses of Considered Steel Bridge in Time Domain
3.2. Analyses of Considered Steel Bridge in Frequency and Train Speed Domain
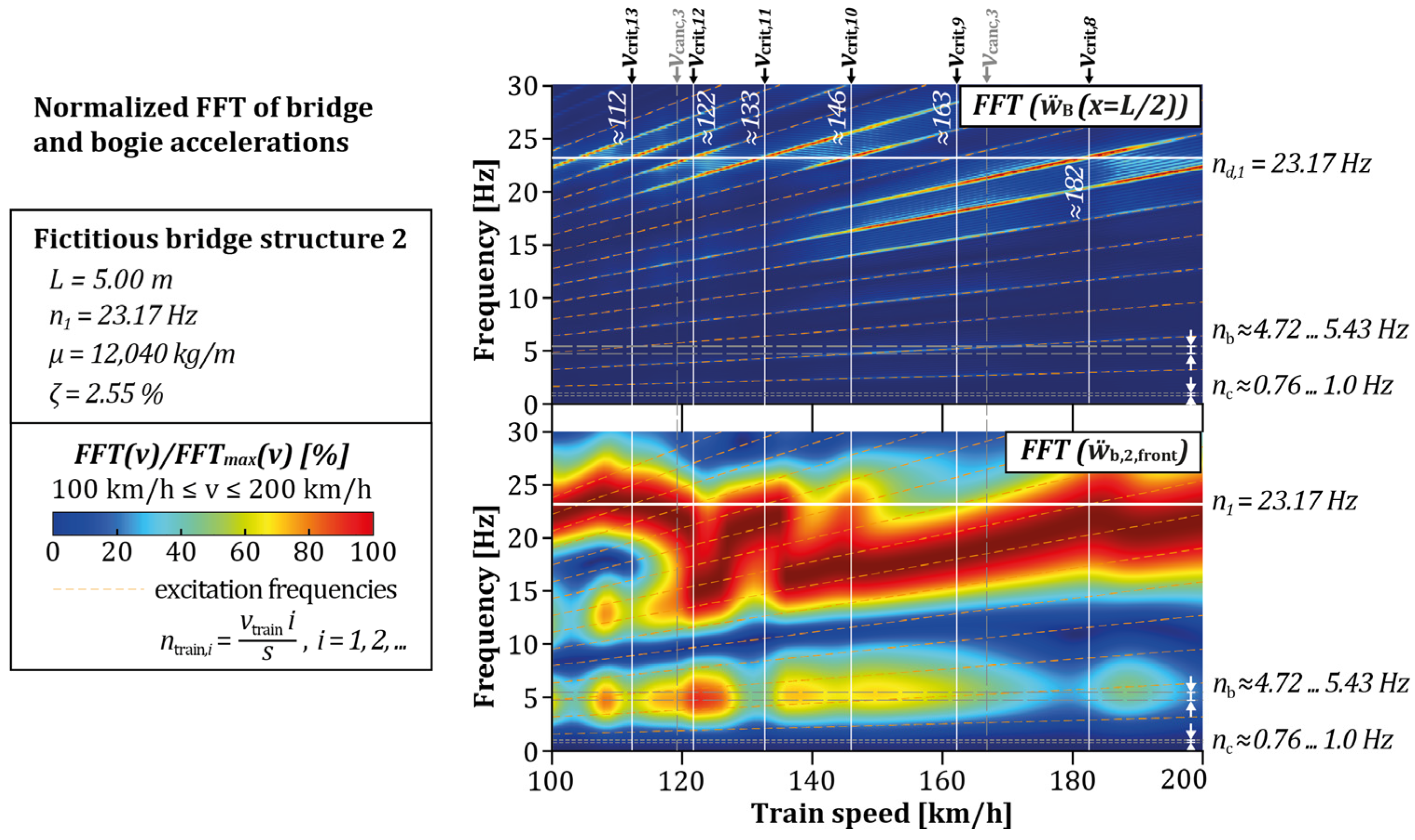
3.3. Comparison with Additional Considered Fictitious Bridge Structures
4. Dynamic Measurements of the Railway Bridge and Crossing Train
4.1. Description of Steel Bridge Selected for In Situ Measurements
4.2. Dynamic Measurements of Selected Steel Bridge
4.3. Dynamic Measurements of Crossing Train
| Measurement range | ±50 g peak |
| Frequency range (±5%) | 1 to 4000 Hz |
| Frequency range (±10%) | 0.7 to 7000 Hz |
| Frequency range (±3 dB) | 0.35 to 12,000 Hz |
| Resonant frequency | ≥22 kHz |
| Broadband resolution | 0.0005 g rms |
| Non-Linearity | ≤1% |
5. Conclusions
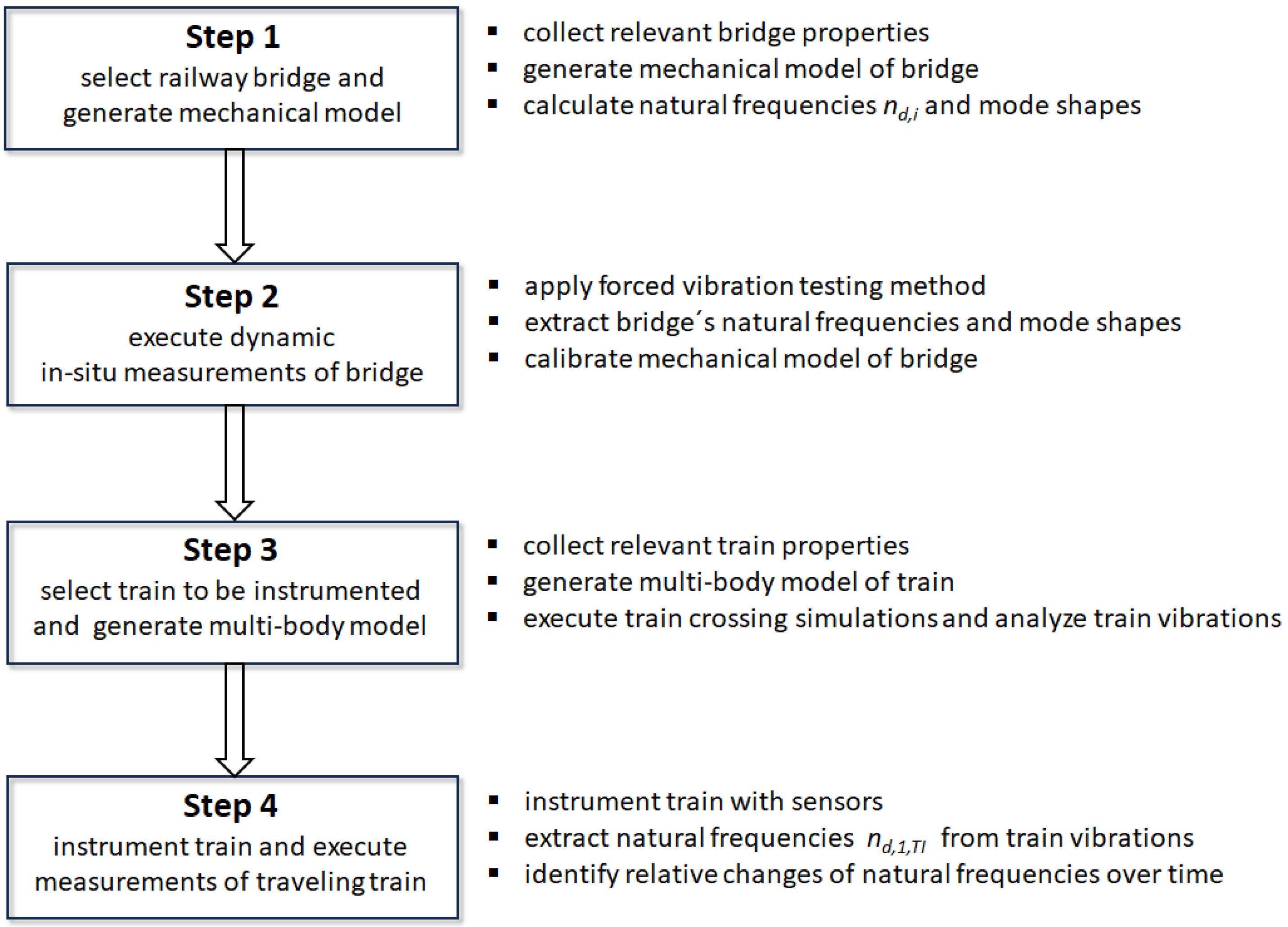
- The executed analyses—shown here only for a particular bogie frame of the considered train, for a particular traveling direction, and three exemplary realistic railway bridge structures—indicate a strong similarity in the dynamic behavior of the bridge and the bogie frames during train crossing. This is particularly evident in the frequency domain, although identifying the bridge’s natural frequency is only possible when analyzing a wider range of speeds, including at least one resonant speed;
- At crossing speeds of the trains, which are not very close to resonance speeds or where a cancellation speed is close, the frequency components resulting from the excitation frequencies dominate the acceleration response of the bridge structure and bogie frame. The same applies to cases where the bogie frames, for which the natural frequency of the primary stage is—as in the case of the existing steel deck bridge—also in the vicinity of the first bending frequency;
- The conducted forced vibration tests of the existing steel deck bridge and, in particular, the bridge´s natural frequencies and damping ratio determined turned out to be an important basis for the reliable identification of the bridge´s first bending mode by application of vehicle-based iSHM method;
- In situ measurements of both the train and bridge vibration responses were performed during the train crossing events, and thus, it could be shown that the first bending frequency of the bridge nd,1 = 4.52 Hz (determined by forced vibration testing), was dominantly excited through the crossing train at 135 km/h;
- The first bending frequency of the bridge was clearly determined by the application of the vehicle-based iSHM method, considering the frequency response function of bogie frame vibrations during the train crossing event at 135 km/h. The train-identified bridge´s bending frequency was identified with nd,1,TI = 4.38 Hz, which is in accordance with the numerical results and around 3% smaller than the value determined by forced vibration testing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| A | Accelerometer |
| FFT | Fast Fourier Transform |
| iSHM | Indirect Structural Health Monitoring |
| ICP | Integrated Circuit Piezoelectric |
| SH | Electrodynamic long-stroke shaker |
References
- Reiterer, M.; Firus, A. Dynamische Analyse der Zugüberfahrt bei Eisenbahnbrücken unter Berücksichtigung von nichtlinearen Effekten. Beton-Und Stahlbetonbau 2021, 117, 90–98. [Google Scholar] [CrossRef]
- EN 1990:2002/A1:2005/AC:2010; Eurocode—Basis of Structural Design. CEN European Committee for Standardization: Brussels, Belgium, 2021.
- RW 08.01.04; Dynamische Berechnung von Eisenbahnbrücken, Anhang 1: Zugdefinitionen. ÖBB-Infrastruktur AG: Vienna, Austria, 2022.
- Allahvirdizadeh, R.; Andersson, A.; Karoumi, R. Improved dynamic design method of ballasted high-speed railway bridges using surrogate-assisted reliability-based design optimization of dependent variables. Reliab. Eng. Syst. Saf. 2023, 238, 109406. [Google Scholar] [CrossRef]
- Reiterer, M.; Firus, A.; Vorwagner, A.; Lombaert, G.; Schneider, J.; Kohl, A.M. Railway bridge dynamics: Development of a new high-speed train load model for dynamic analyses of train crossing. In Proceedings of the IABSE Congress Ghent 2021—Structural Engineering for Future Societal Needs, Ghent, Belgium, 22–24 September 2021. [Google Scholar] [CrossRef]
- Farrat, C.R.; James, G.H., III. System identification from ambient vibration measurements on a bridge. J. Sound Vib. 1997, 205, 1–18. [Google Scholar] [CrossRef]
- Reiterer, M. Experimentelle und numerische Untersuchung einer bestehenden Eisenbahnbrücke bei Zugüberfahrt. Bautechnik 2020, 97, 473–489. [Google Scholar] [CrossRef]
- Huang, C.S.; Yang, Y.B.; Lu, L.Y.; Chen, C.H. Dynamic testing and system identification of a multi-span highway bridge. Earthq. Eng. Struct. Dyn. 1999, 28, 857–878. [Google Scholar] [CrossRef]
- Reiterer, M.; Lachinger, S.; Fink, J.; Bruschetini-Ambro, S.-Z. Ermittlung der dynamischen Kennwerte von Eisenbahnbrücken unter Anwendung von unterschiedlichen Schwingungsanregungsmethoden. Bauingenieur 2017, 92, 2–13. (In German) [Google Scholar]
- Yang, Y.B.; Lin, C.W.; Yau, J.D. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Lin, C.W.; Yang, Y.B. Use of a passing vehicle to scan the fundamental bridge frequencies: An experimental verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar] [CrossRef]
- Tan, C.; Elhattab, A.; Uddin, N. “Drive-by” bridge frequency-based monitoring utilizing wavelet transform. J. Civ. Struct. Health Monit. 2017, 7, 615–625. [Google Scholar] [CrossRef]
- Yang, Y.B.; Zhang, B.; Chen, Y.A.; Qian, Y.; Wu, Y.T. Bridge damping identification by vehicle scanning method. Eng. Struct. 2019, 183, 637–645. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Z.; Wang, Z.; Shi, K.; Xu, H.; Qiu, F.; Zhu, J. A novel frequency-free movable test vehicle for retrieving modal parameters of bridges: Theory and experiment. Mech. Syst. Signal Process. 2022, 170, 108854. [Google Scholar] [CrossRef]
- Urushadze, S.; Yau, J.-D.; Yang, Y.-B.; Bayer, J. Theoretical and Experimental Verifications of Bridge Frequency Using Indirect Method. In Dynamics of Civil Structures; Springer: Berlin/Heidelberg, Germany, 2020; Volume 2, pp. 153–158. [Google Scholar]
- Tan, C.; Zhao, H.; OBrien, E.J.; Uddin, N.; Fitzgerald, P.C.; McGetrick, P.J.; Kim, C.-W. Extracting mode shapes from drive-by measurements to detect global and local damage in bridges. Struct. Infrastruct. Eng. 2021, 17, 1582–1596. [Google Scholar] [CrossRef]
- Tan, C.; Elhattab, A.; Uddin, N. Wavelet-Entropy Approach for Detection of Bridge Damages Using Direct and Indirect Bridge Records. J. Infrastruct. Syst. 2020, 26, 04020037. [Google Scholar] [CrossRef]
- Tan, C.; Uddin, N. Hilbert transform based approach to improve extraction of “drive-by” bridge frequency. Smart Struct. Syst. 2020, 25, 265–277. [Google Scholar] [CrossRef]
- McGetrick, P.J.; Gonzalez, A.; Obrien, E.J. Theoretical investigation of the use of a moving vehicle to identify bridge dynamic parameters. Insight 2009, 51, 433–438. [Google Scholar] [CrossRef]
- Siringoringo, D.M.; Fujino, Y. Estimating Bridge Fundamental Frequency from Vibration Response of Instrumented Passing Vehicle: Analytical and Experimental Study. Adv. Struct. Eng. 2012, 15, 417–433. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.S.; Kong, B. Numerically Extracting Bridge Modal Properties from Dynamic Responses of Moving Vehicles. J. Eng. Mech. 2016, 142, 04016025. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; Obrien, E. Drive-By Bridge Frequency Identification under Operational Roadway Speeds Employing Frequency Independent Underdamped Pinning Stochastic Resonance (FI-UPSR). Sensors 2018, 18, 4207. [Google Scholar] [CrossRef]
- Mei, Q.P.; Gul, M.; Boay, M. Indirect health monitoring of bridges using Mel-frequency cepstral coefficients and principal component analysis. Mech. Syst. Signal Process. 2019, 119, 523–546. [Google Scholar] [CrossRef]
- Gonzalez, A.; OBrien, E.J.; McGetrick, P.J. Identification of damping in a bridge using a moving instrumented vehicle. J. Sound Vib. 2012, 331, 4115–4131. [Google Scholar] [CrossRef]
- Keenahan, J.; Obrien, E.J.; McGetrick, P.J.; Gonzalez, A. The use of a dynamic truck–trailer drive-by system to monitor bridge damping. Struct. Health Monit. Int. J. 2013, 13, 143–157. [Google Scholar] [CrossRef]
- Tan, C.J.; Uddin, N.; OBrien, E.J.; McGetrick, P.J.; Kim, C.W. Extraction of Bridge Modal Parameters Using Passing Vehicle Response. J. Bridge Eng. 2019, 24, 04019087. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Brien, E.J. Identification of bridge mode shapes using Short Time Frequency Domain Decomposition of the responses measured in a passing vehicle. Eng. Struct. 2014, 81, 386–397. [Google Scholar] [CrossRef]
- Yang, Y.B.; Li, Y.C.; Chang, K.C. Constructing the mode shapes of a bridge from a passing vehicle: A theoretical study. Smart Struct. Syst. 2014, 13, 797–819. [Google Scholar] [CrossRef]
- Oshima, Y.; Yamamoto, K.; Sugiura, K. Damage assessment of a bridge based on mode shapes estimated by responses of passing vehicles. Smart Struct. Syst. 2014, 13, 731–753. [Google Scholar] [CrossRef]
- Malekjafarian, A.; OBrien, E.J. On the use of a passing vehicle for the estimation of bridge mode shapes. J. Sound Vib. 2017, 397, 77–91. [Google Scholar] [CrossRef]
- Marulanda, J.; Caicedo, J.M.; Thomson, P. Mode shapes identification under harmonic excitation using mobile sensors. Ing. Compet. 2017, 19, 140–145. [Google Scholar]
- Zhang, Y.; Wang, L.Q.; Xiang, Z.H. Damage detection by mode shape squares extracted from a passing vehicle. J. Sound Vib. 2012, 331, 291–307. [Google Scholar] [CrossRef]
- OBrien, E.J.; Malekjafarian, A. A mode shape-based damage detection approach using laser measurement from a vehicle crossing a simply supported bridge. Struct. Control Health Monit. 2016, 23, 1273–1286. [Google Scholar] [CrossRef]
- Domaneschi, M.; Limongelli, M.P.; Martinelli, L. Vibration Based Damage Localization Using MEMS on a Suspension Bridge Model. Smart Struct. Syst. 2013, 12, 679–694. [Google Scholar] [CrossRef]
- Domaneschi, M.; Limongelli, M.P.; Martinelli, L. Multi-Site Damage Localization in a Suspension Bridge via Aftershock Monitoring. Ing. Sismica 2013, 30, 56–72. [Google Scholar]
- Domaneschi, M.; Sigurdardottir, D.; Glisic, B. Damage detection based on output-only monitoring of dynamic curvature in concrete-steel composite bridge decks. Struct. Monit. Maint. 2017, 4, 1–15. [Google Scholar] [CrossRef]
- Vospernig, M.; Reiterer, M. Evaluation of the dynamic system characteristics for single span concrete railway bridges—Determination of dynamic parameters due to measurements on two test bridges in cracked and uncracked state with variations of the dead load. Beton Und Stahlbetonbau 2020, 115, 424–437. [Google Scholar] [CrossRef]
- Zhan, J.; You, J.; Kong, X.; Zhang, N. An indirect bridge frequency identification method using dynamic responses of high-speed railway vehicles. Eng. Struct. 2021, 243, 112694. [Google Scholar] [CrossRef]
- Frýba, L.; Kadecka, S. ICE Virtual Library. Dynamics of Railway Bridges; Telford, T., Ed.; Publications Sales Department, American, Society of Civil Engineers: New York, NY, USA; London, UK, 1996. [Google Scholar]
- Sun, Y.Q.; Dhanasekar, M. A dynamic model for the vertical interaction of the rail track and wagon system. Int. J. Solids Struct. 2002, 39, 1337–1359. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yau, J.D.; Wu, Y.S. Vehicle-Bridge Interaction Dynamics: With Applications to High-Speed Railways; World Scientific: River Edge, NJ, USA; London, UK, 2004. [Google Scholar]
- Lou, P. Finite element analysis for train–track–bridge interaction system. Arch. Appl. Mech. 2007, 77, 707–728. [Google Scholar] [CrossRef]
- Mähr, T.C. Theoretische und experimentelle Untersuchungen zum dynamischen Verhalten von Eisenbahnbrücken mit Schotteroberbau unter Verkehrslast. Ph.D. Thesis, TU Wien, Vienna, Austria, 2008. (In German). [Google Scholar]
- Glatz, B.; Fink, J. A redesigned approach to the additional damping method in the dynamic analysis of simply supported railway bridges. Eng. Struct. 2021, 241, 112415. (In German) [Google Scholar] [CrossRef]
- Bettinelli, L.; Stollwitzer, A.; Fink, J. Numerical Study on the Influence of Coupling Beam Modeling on Structural Accelerations during High-Speed Train Crossings. Appl. Sci. 2023, 13, 8746. [Google Scholar] [CrossRef]
- EN 1991-2:2003/AC:2010; Eurocode 1: Actions on Structures—Part 2: Traffic Loads on Bridges. CEN European Committee for Standardization: Brussels, Belgium, 2010.
- Lei, X.; Noda, N.A. Analyses of dynamic response of vehicle and track coupling system with random irregularity of track vertical profile. J. Sound Vib. 2002, 258, 147–165. [Google Scholar] [CrossRef]
- Dinh, V.N.; Du Kim, K.; Warnitchai, P. Dynamic analysis of three-dimensional bridge–high-speed train interactions using a wheel–rail contact model. Eng. Struct. 2009, 31, 3090–3106. [Google Scholar] [CrossRef]
- Cantero, D.; Arvidsson, T.; OBrien, E.; Karoumi, R. Train–track–bridge modelling and review of parameters. Struct. Infrastruct. Eng. 2016, 12, 1051–1064. [Google Scholar] [CrossRef]
- The Mathworks Inc. MATLAB 2022; The Mathworks Inc.: Natick, MA, USA, 2022. [Google Scholar]
- Shampine, L.F.; Reichelt, M.W. The MATLAB ODE Suite. SIAM J. Sci. Comput. 1997, 18, 1–22. [Google Scholar] [CrossRef]
- Xia, H.; Li, H.L.; Guo, W.W.; de Roeck, G. Vibration Resonance and Cancellation of Simply Supported Bridges under Moving Train Loads. J. Eng. Mech. 2014, 140, 04014015. [Google Scholar] [CrossRef]
- Doménech, A.; Museros, P.; Martínez-Rodrigo, M.D. Influence of the vehicle model on the prediction of the maximum bending response of simply-supported bridges under high-speed railway traffic. Eng. Struct. 2014, 72, 123–139. [Google Scholar] [CrossRef]
- Arvidsson, T.; Karoumi, R.; Pacoste, C. Statistical screening of modelling alternatives in train–bridge interaction systems. Eng. Struct. 2014, 59, 693–701. [Google Scholar] [CrossRef]
- Yan, W.J.; Feng, Z.; Ren, W.X. New insights into coherence analysis with a view towards extracting structural natural frequencies under operational conditions. Measurement 2016, 77, 187–202. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L [m] | EI [Nm2] | ζ [%] | nd,1 [Hz] | μ [kg/m] | μ’ [kg/m] | μtrack [kg/m] |
|---|---|---|---|---|---|---|
| 33.3 (1) | 73.18 × 109 (1) | 1.88 (2) | 4.52 (2) | 7188 (3) | 3587 (1) | 3601 |
| No. | L [m] | EI [Nm2] | ζ [%] | n1 [Hz] | μ [kg/m] |
|---|---|---|---|---|---|
| 1 | 11.0 | 5.70 × 109 (3) | 1.63 (2) | 11.51 (1) | 7253 (1) |
| 2 | 5.0 | 1.64 × 109 (3) | 2.55 (2) | 23.17 (1) | 12,040 (1) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reiterer, M.; Bettinelli, L.; Schellander, J.; Stollwitzer, A.; Fink, J. Application of Vehicle-Based Indirect Structural Health Monitoring Method to Railway Bridges—Simulation and In Situ Test. Appl. Sci. 2023, 13, 10928. https://doi.org/10.3390/app131910928
Reiterer M, Bettinelli L, Schellander J, Stollwitzer A, Fink J. Application of Vehicle-Based Indirect Structural Health Monitoring Method to Railway Bridges—Simulation and In Situ Test. Applied Sciences. 2023; 13(19):10928. https://doi.org/10.3390/app131910928
Chicago/Turabian StyleReiterer, Michael, Lara Bettinelli, Janez Schellander, Andreas Stollwitzer, and Josef Fink. 2023. "Application of Vehicle-Based Indirect Structural Health Monitoring Method to Railway Bridges—Simulation and In Situ Test" Applied Sciences 13, no. 19: 10928. https://doi.org/10.3390/app131910928