
A Variable-Scale Attention Mechanism Guided Time-Frequency Feature Fusion Transfer Learning Method for Bearing Fault Diagnosis in an Annealing Kiln Roller System

Abstract
:Featured Application
Abstract
1. Introduction
2. Theory Background and Methods
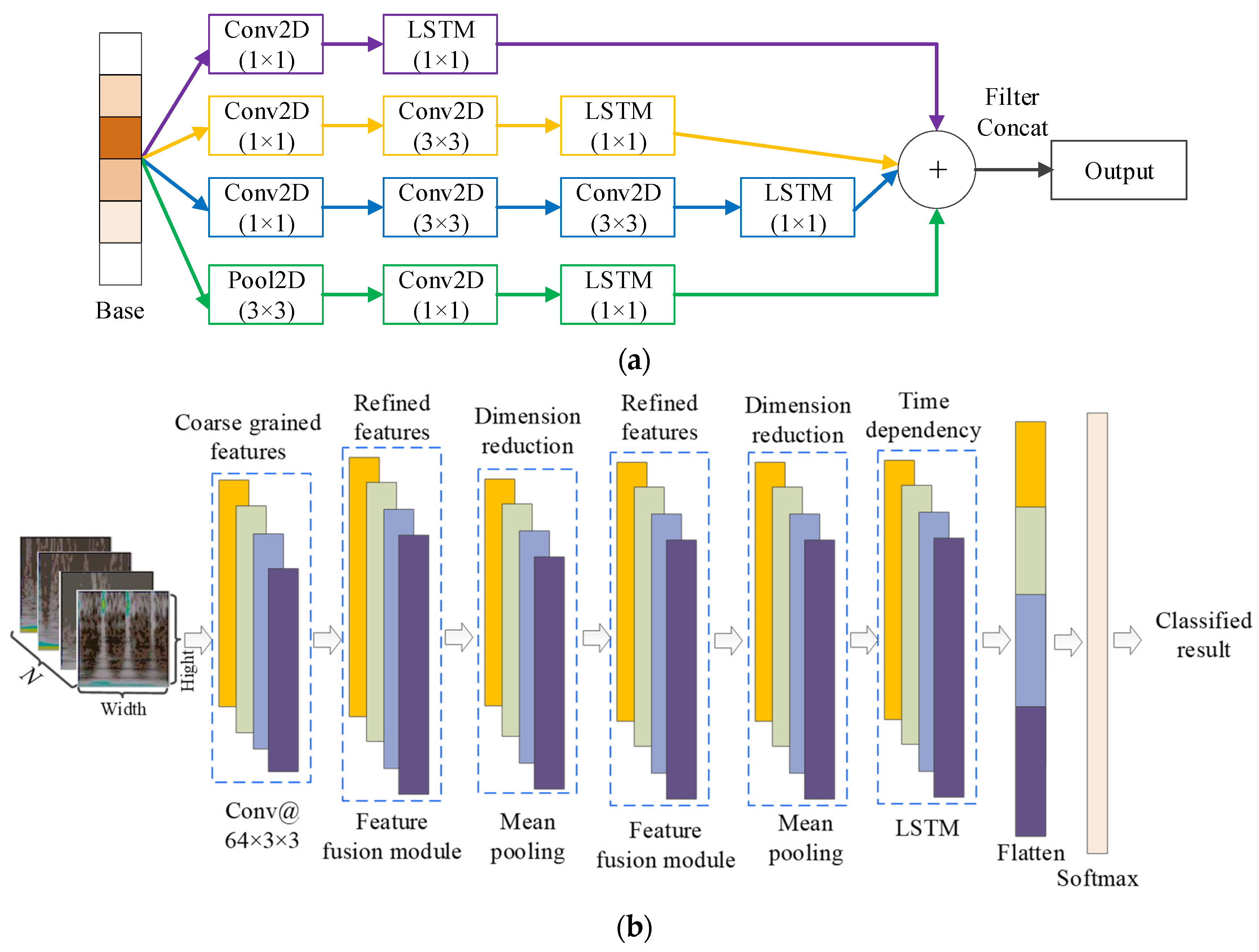
2.1. Inception Module
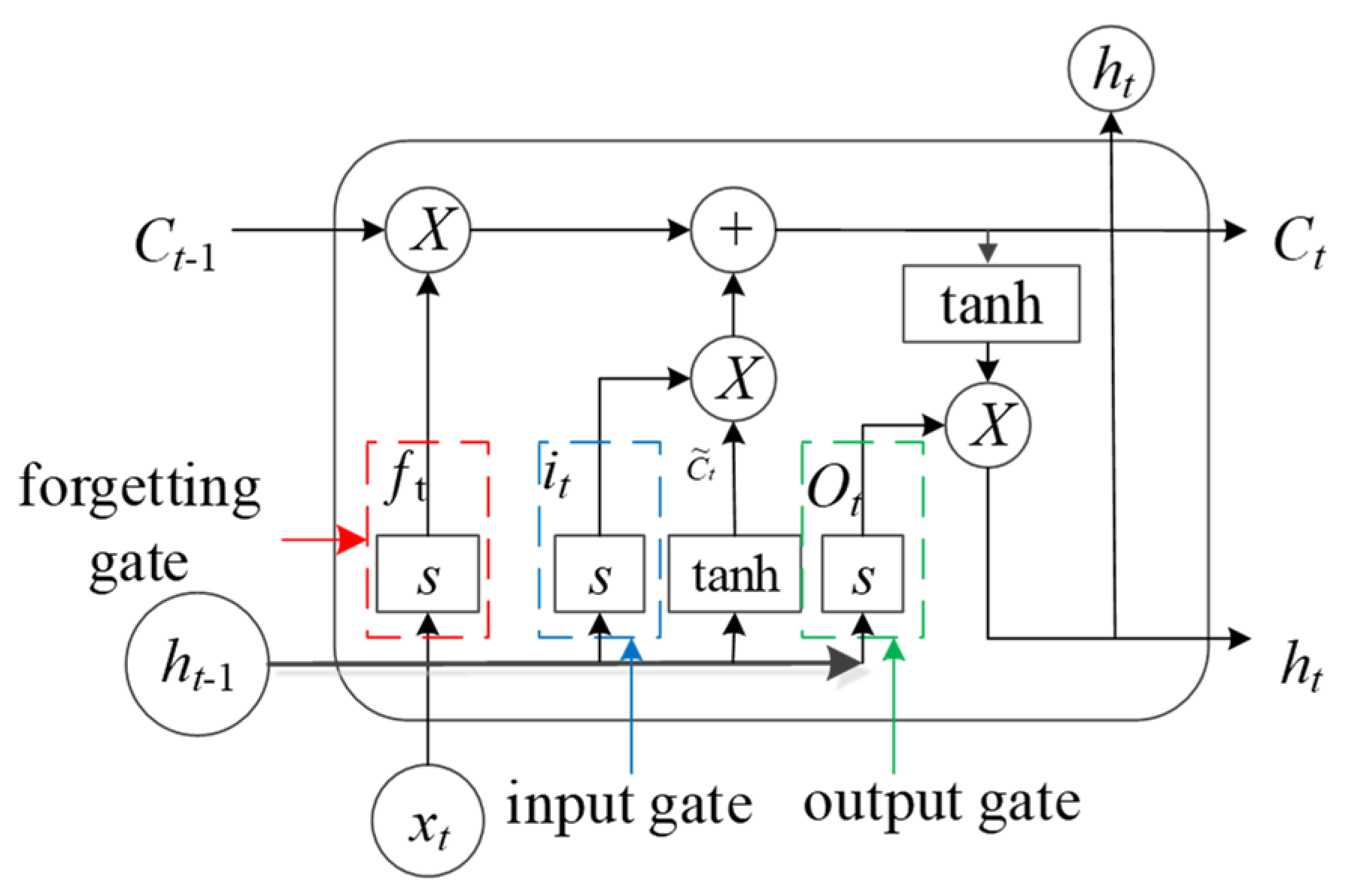
2.2. LSTM Network
2.3. MK-MMD
3. Proposed Method
3.1. Variable-Scale Attention Mechanism-Guided Feature Fusion Framework
3.2. Variable-Scale Attention Mechanism-Guided Feature Transfer Learning Framework
3.3. Fault Diagnosis Procedure of Roller Table Bearing System of the Annealing Kiln
- (1)
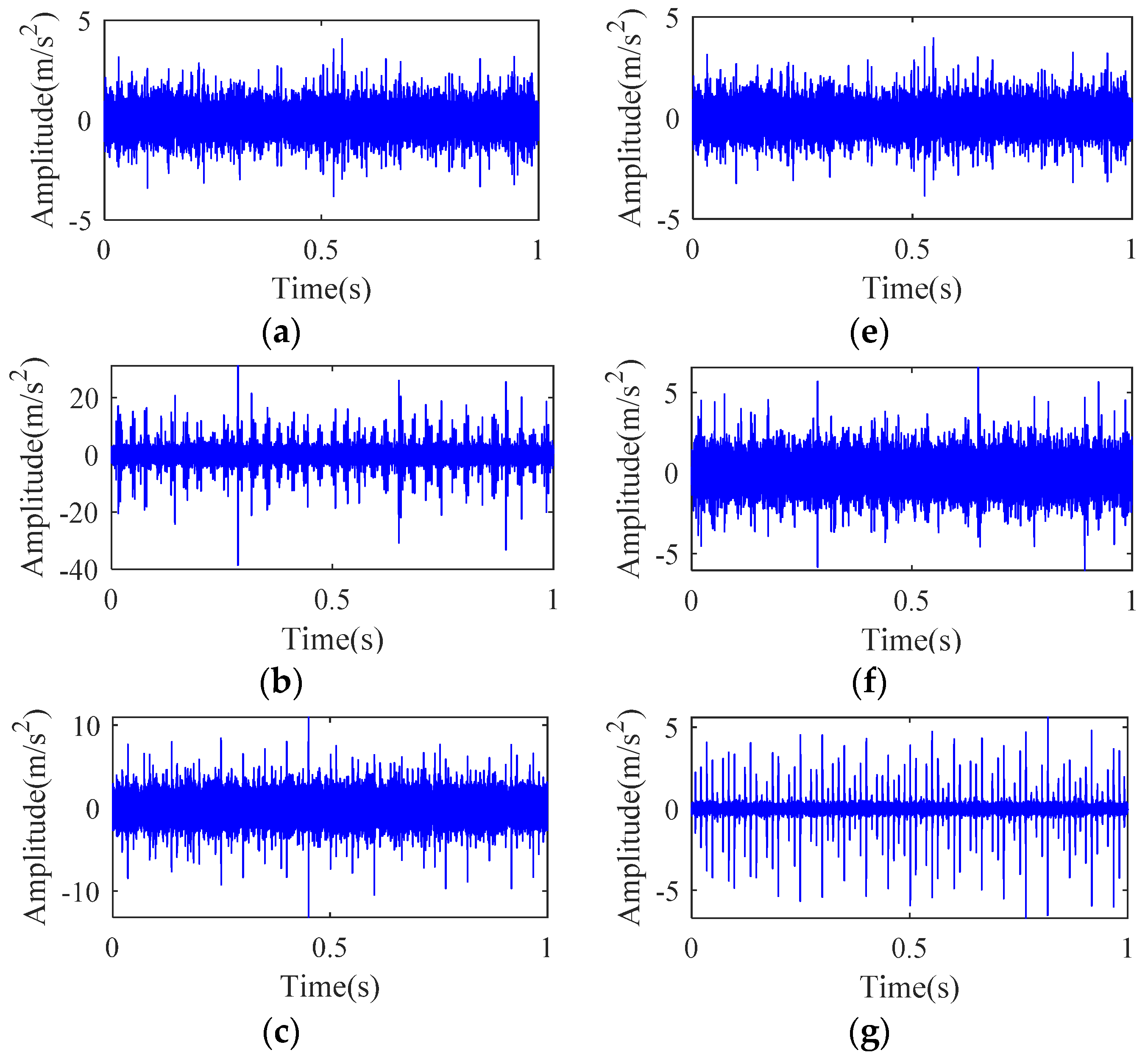
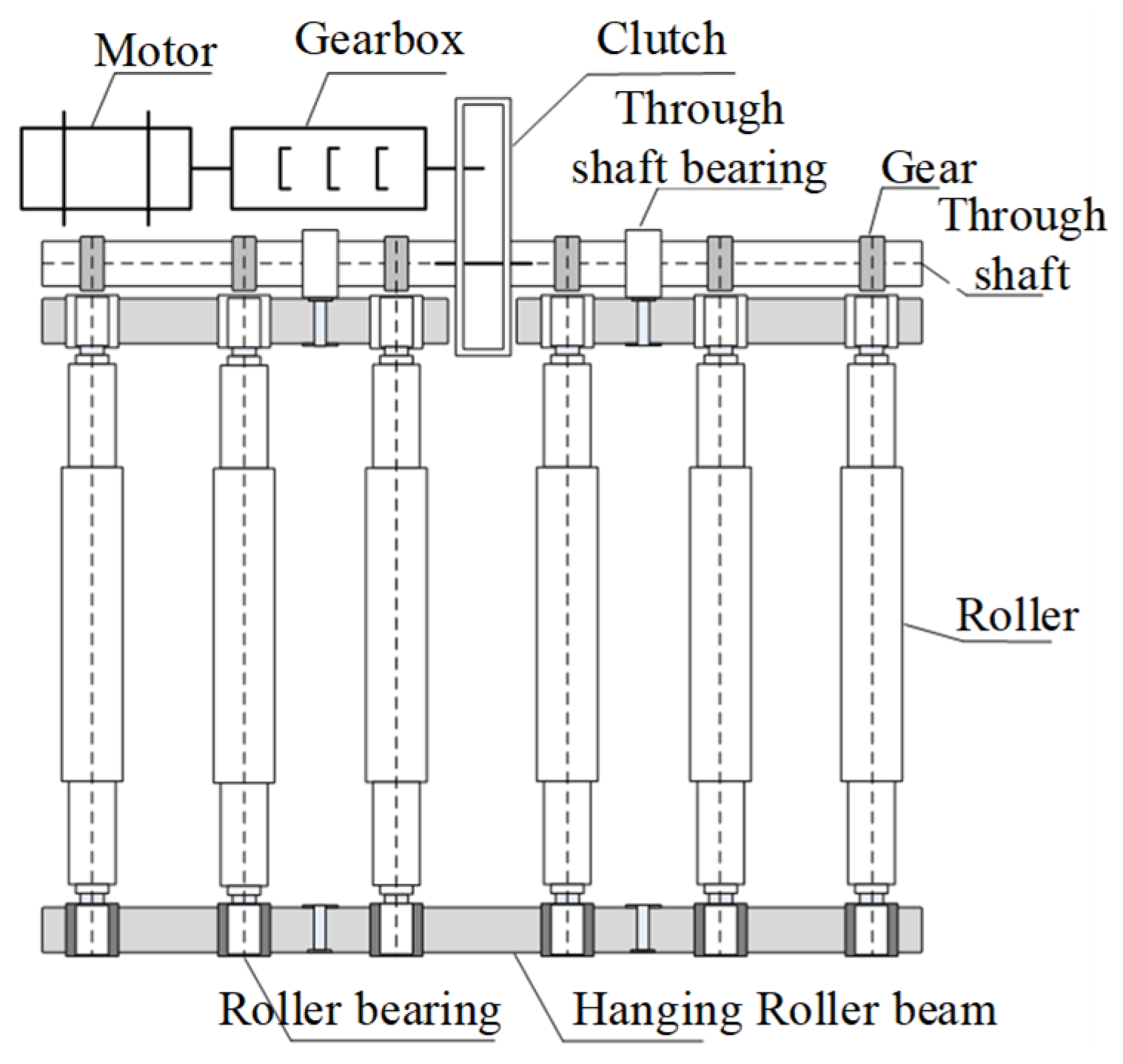
- Accelerometers are used to collect the vibration signal from the bearings in the roller table system of the annealing kiln. The collected vibration signal is decomposed into several CPFs via ITD, and the effective components are selected using the Gini–kurtosis criterion, as shown in Equation (9). Then, the denoised bearing vibration signal can be reconstructed for further analysis.GI can not only measure the impulsiveness of the signal but has a strong robustness against the random impulse noise, which is a great concern for signal processing methods based on other sparsity indexes. Impulsiveness is important but not the exclusive feature of the fault components in the measured fault signal. GI, which is a rare statistical index that can highlight repetitive fault components without prior knowledge, is not fully utilized.
- (2)
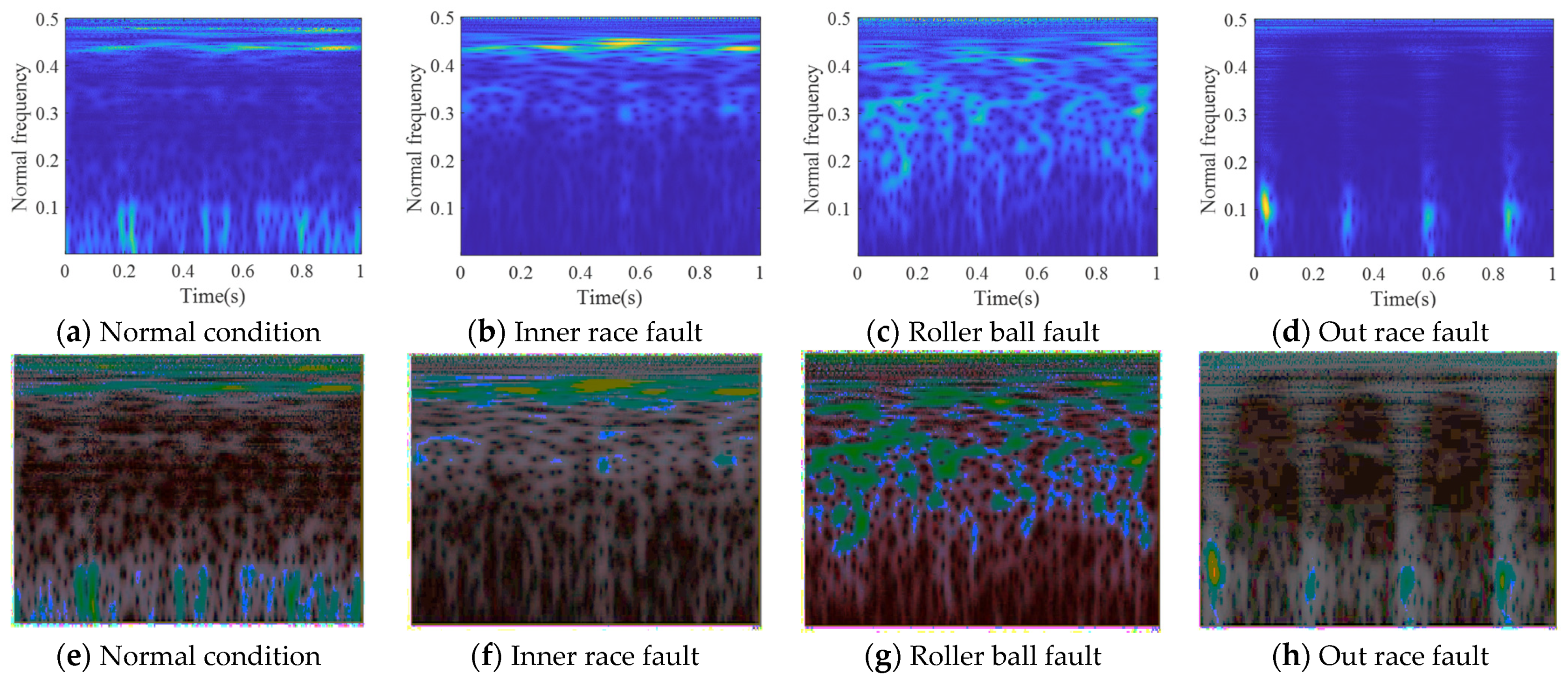
- The time-frequency representation of the denoised signals is obtained using the CWT method with the Morlet wavelet basis function; then, histogram equalization can enhance the time-frequency map.
- (3)
- The time-frequency maps are organized as roller bearing datasets and input into the variable-scale attention mechanism-guided time frequency feature fusion neural network of the roller bearing to intelligently diagnose, train, and obtain the optimal hyperparameters of this network.
- (4)
- Based on the optimal neural network and hyper-parameters, training is completed and the roller bearing intelligent diagnosis network is saved, accurately identifying the health condition of the roller bearing.
- (5)
- Combining the MK-MMD method, an intelligent transfer diagnosis network for through shaft bearings is established, and the parameters of the trained optimal feature fusion intelligent diagnosis network are loaded.
- (6)
- Using the roller and through shaft bearing datasets as the source and target domains, respectively, the roller and labeled through shaft bearing data as the training set, and the unlabeled through shaft bearing data as the test set, the transfer network is trained, the network parameters are fine-tuned by repressing part of the layer, and the through shaft bearing diagnosis results finally generated.
4. Case Study and Verification
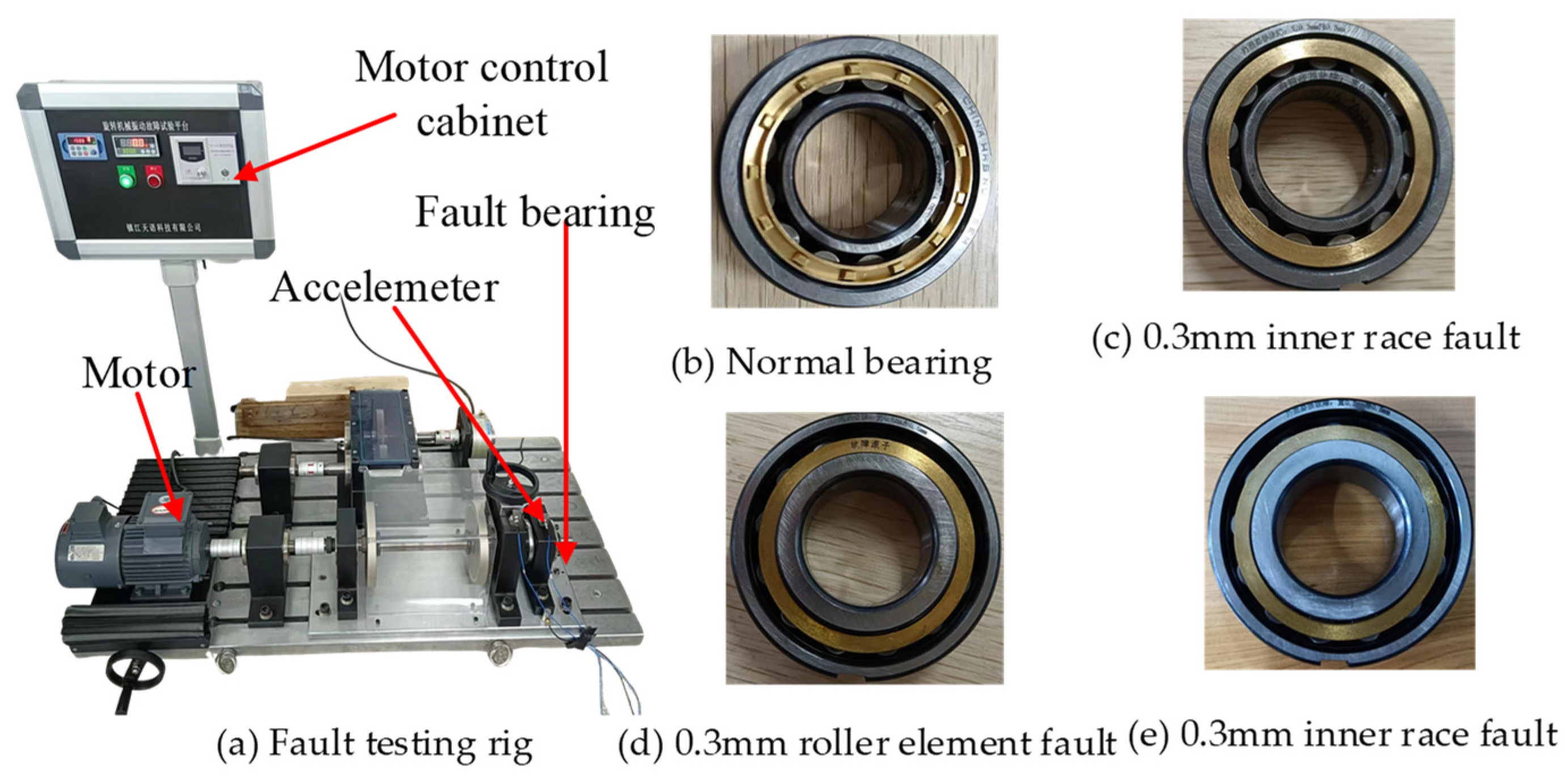
4.1. Introduction to Experiment
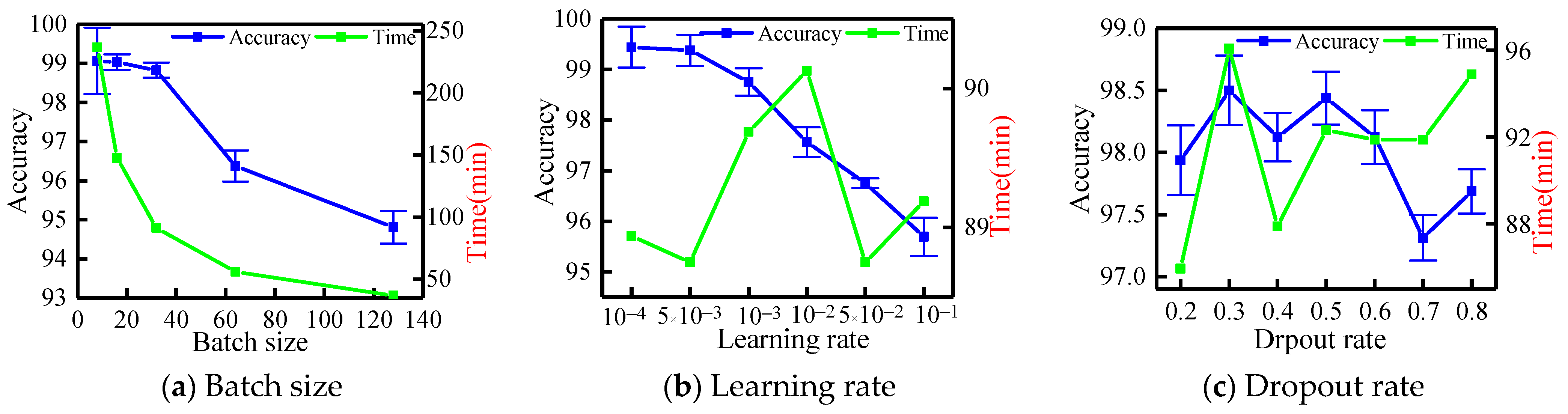
4.2. Experimental Parameter Configuration
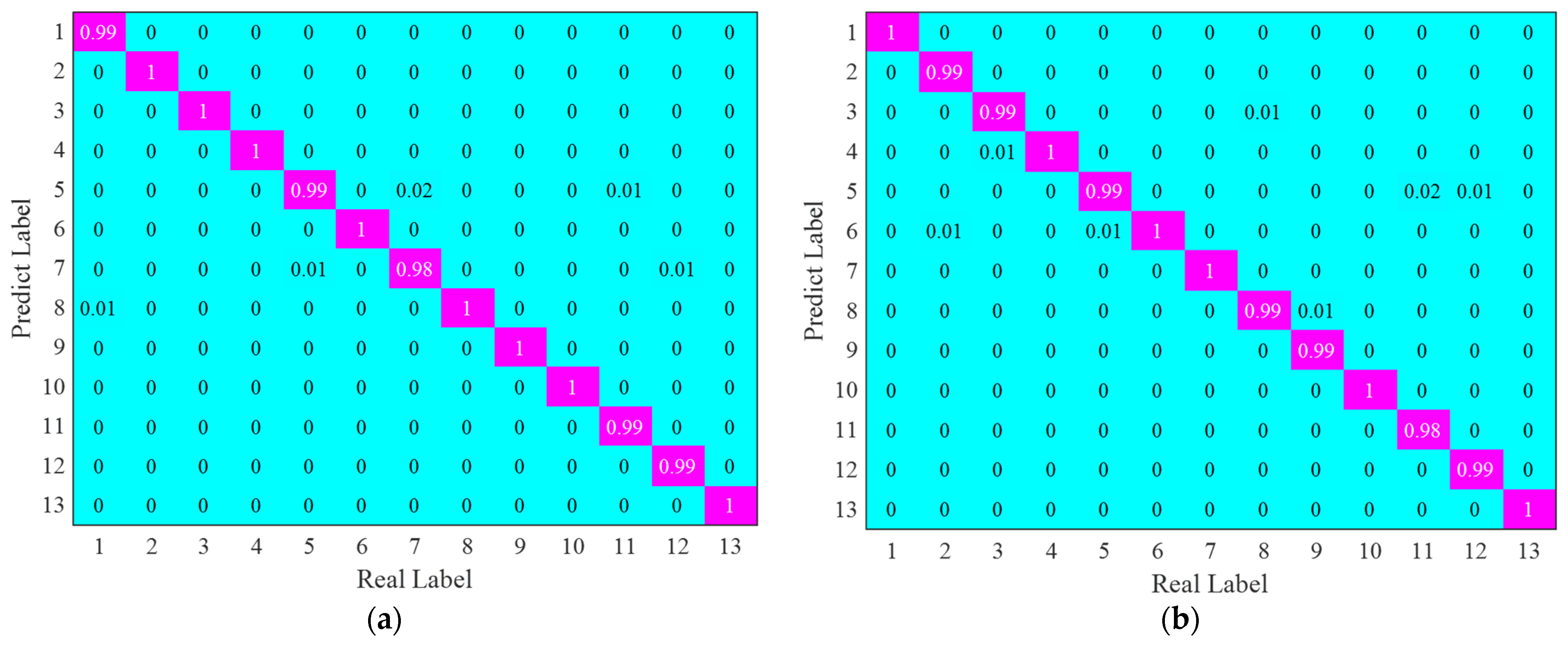
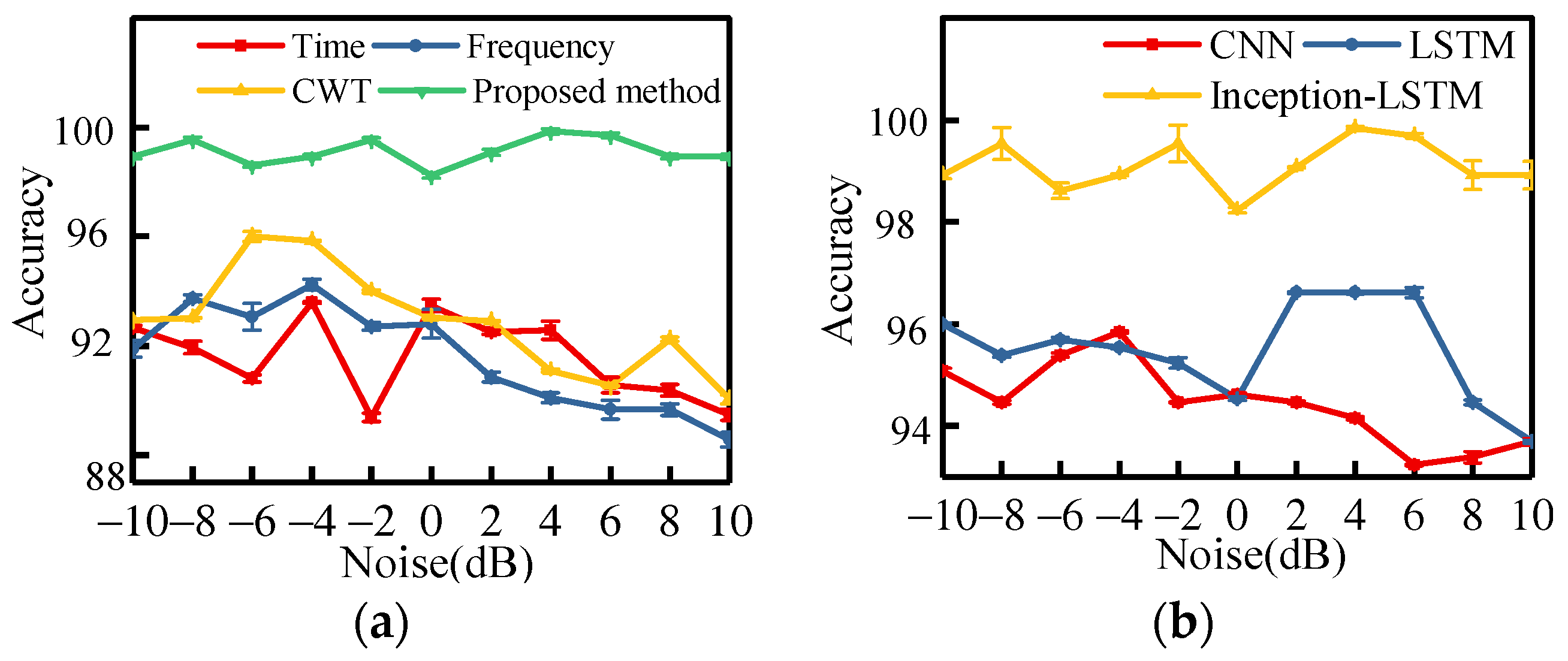
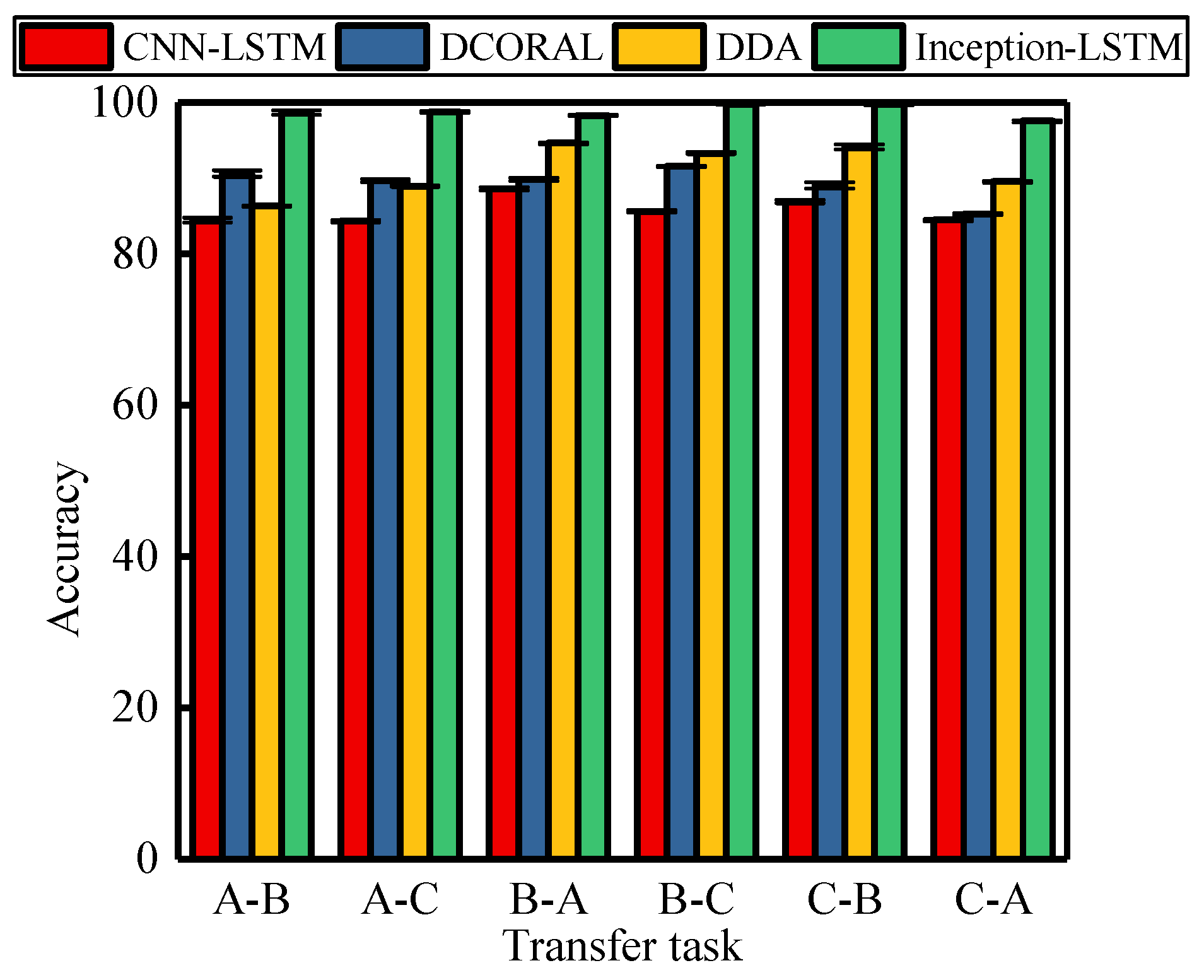
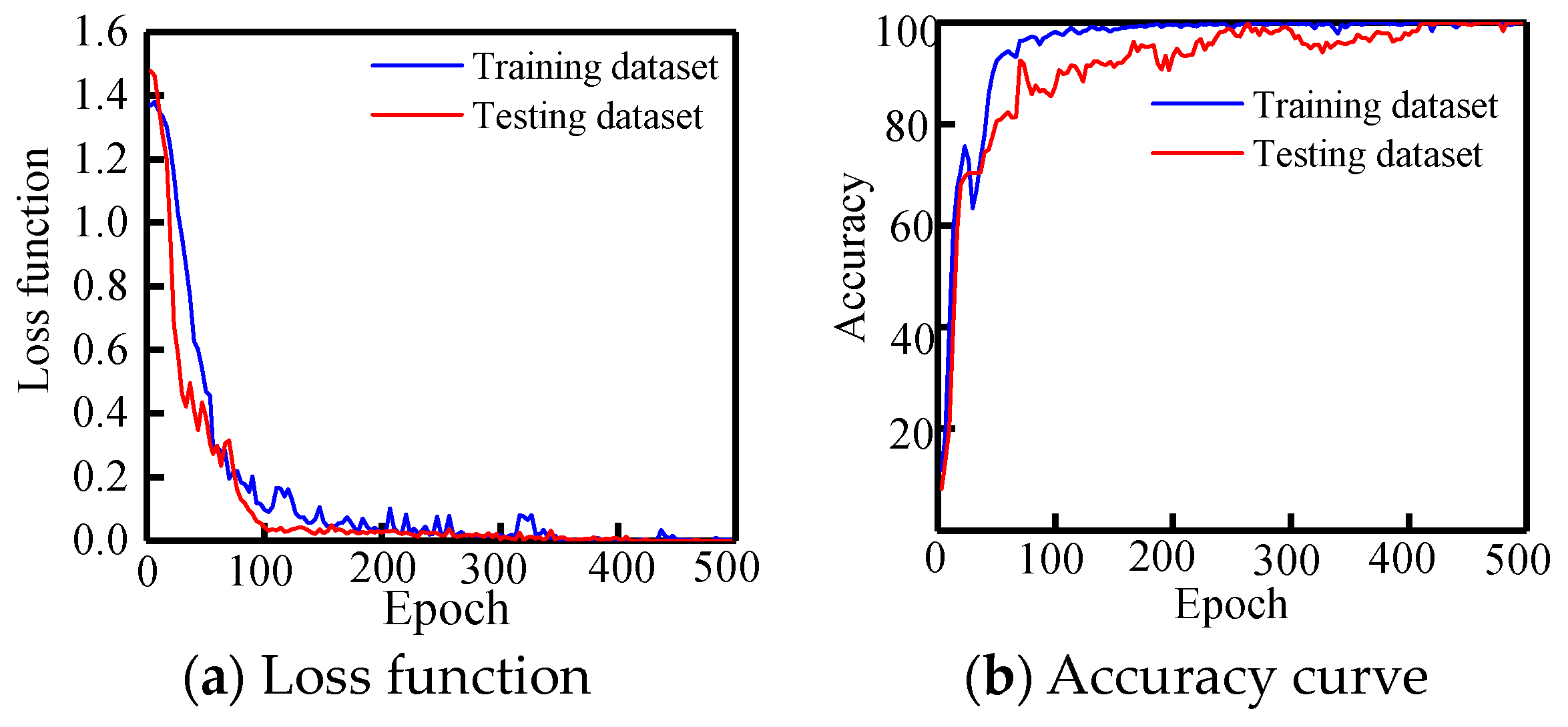
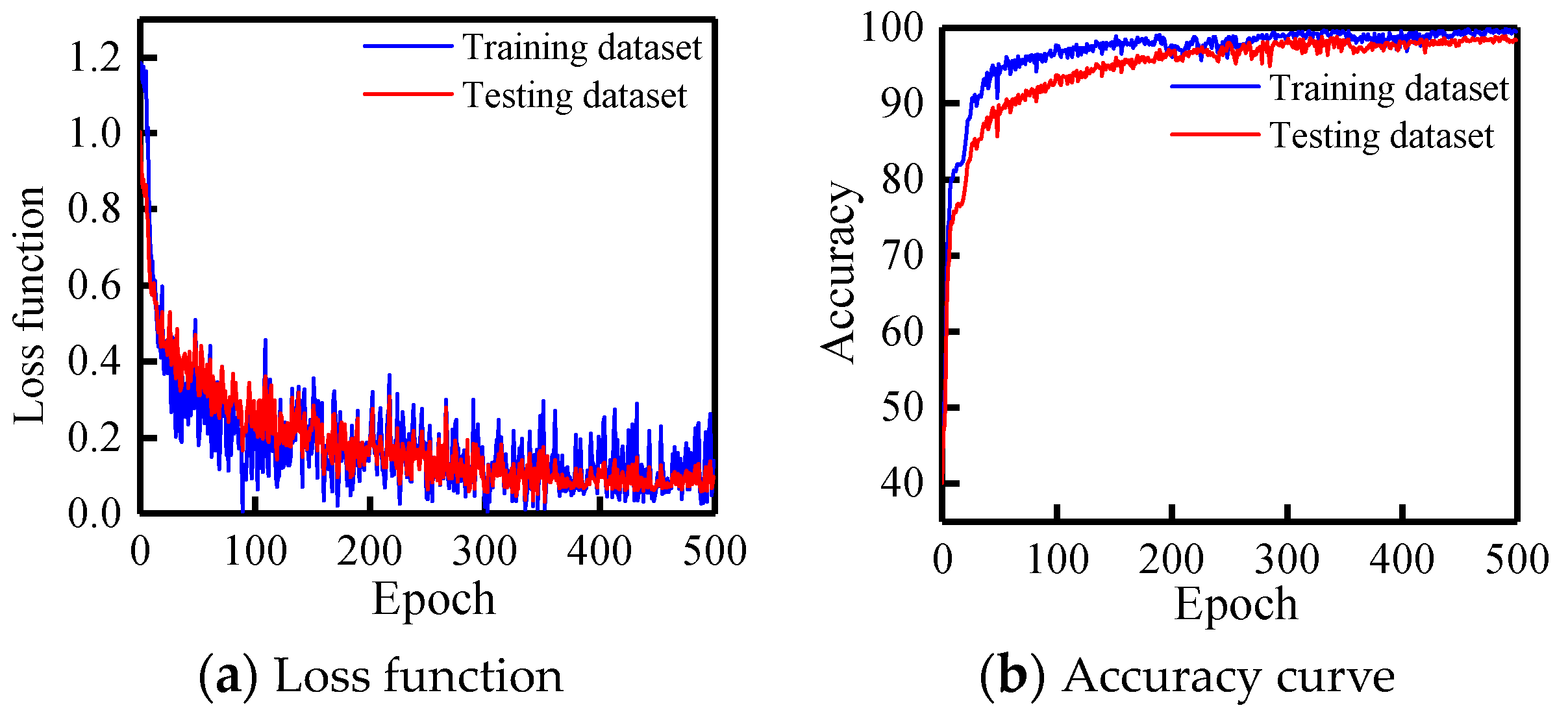
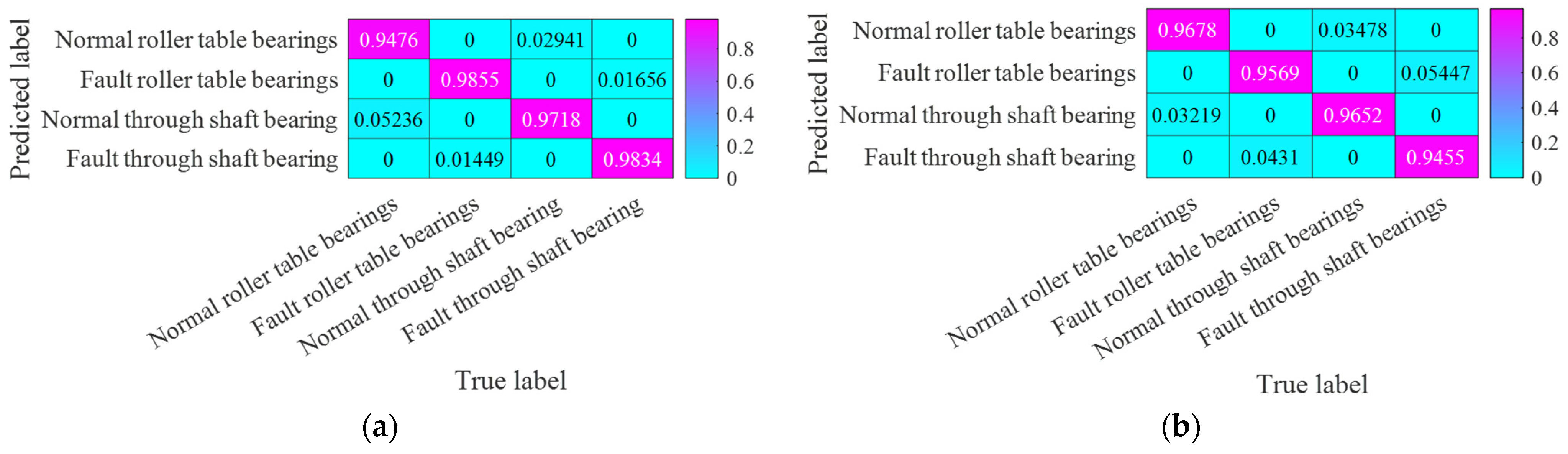
4.3. Analysis of Intelligent Transfer Diagnostic Method
4.4. Fault Diagnosis of Bearings in the Roller Table System of the Annealing Kiln
5. Conclusions
- (1)
- Considering the sparsity and kurtosis of vibration signals, the decomposed components using the ITD method can select and denoise strong mechanical noise, and CWT and histogram equalization can obviously enhance the time-frequency representations, clearly displaying the differentiated feature information on the time-frequency maps and promoting intelligent identification.
- (2)
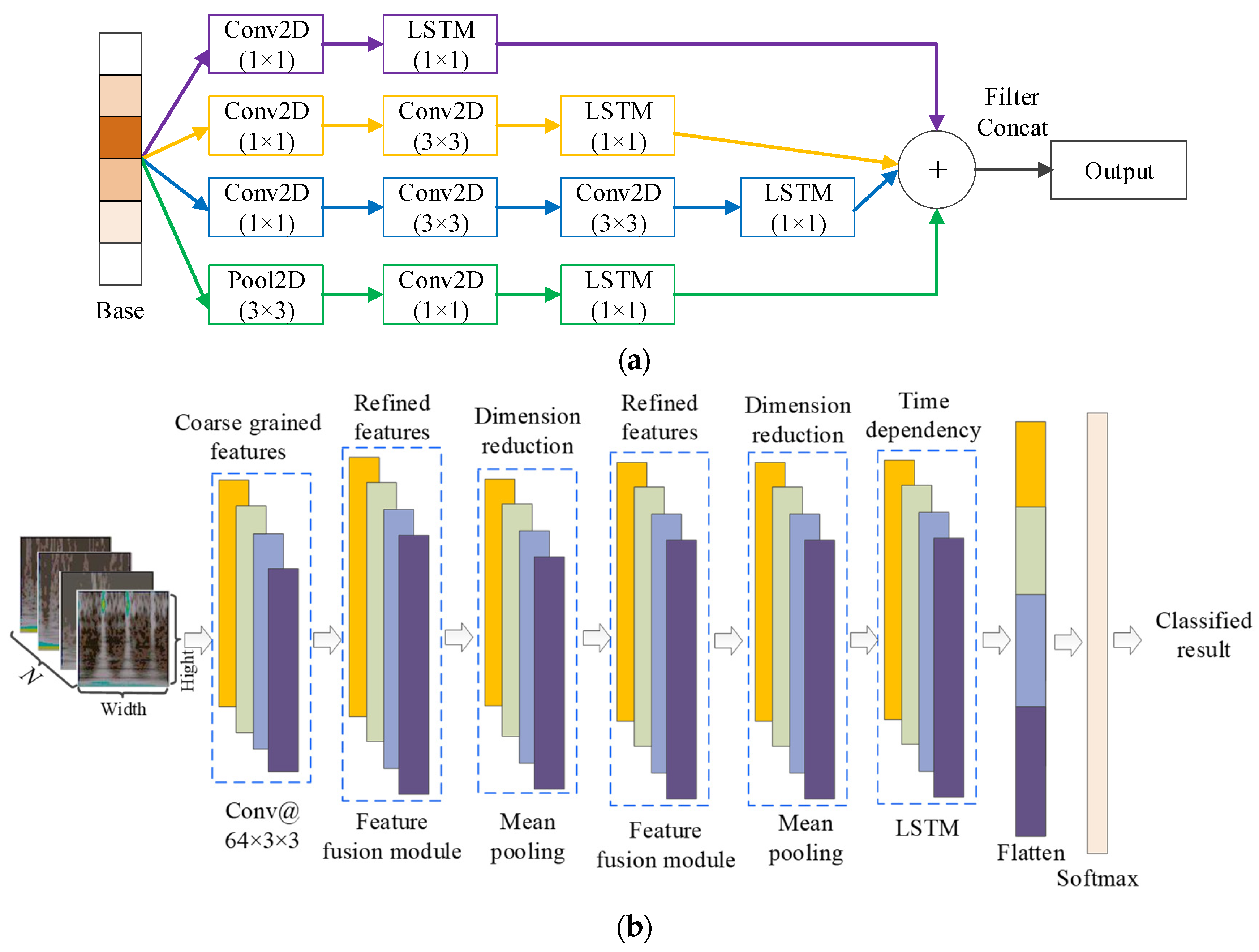
- By combining Inception’s multi-scale feature extraction and the LSTM’s temporal relationship learning ability, an intelligent diagnosis framework for the roller table bearing is established to learn fusion features from the time-frequency representation. The experimental results of the measured data indicate that the proposed framework has excellent feature-extraction ability and can effectively and accurately identify the health condition of roller bearings.
- (3)
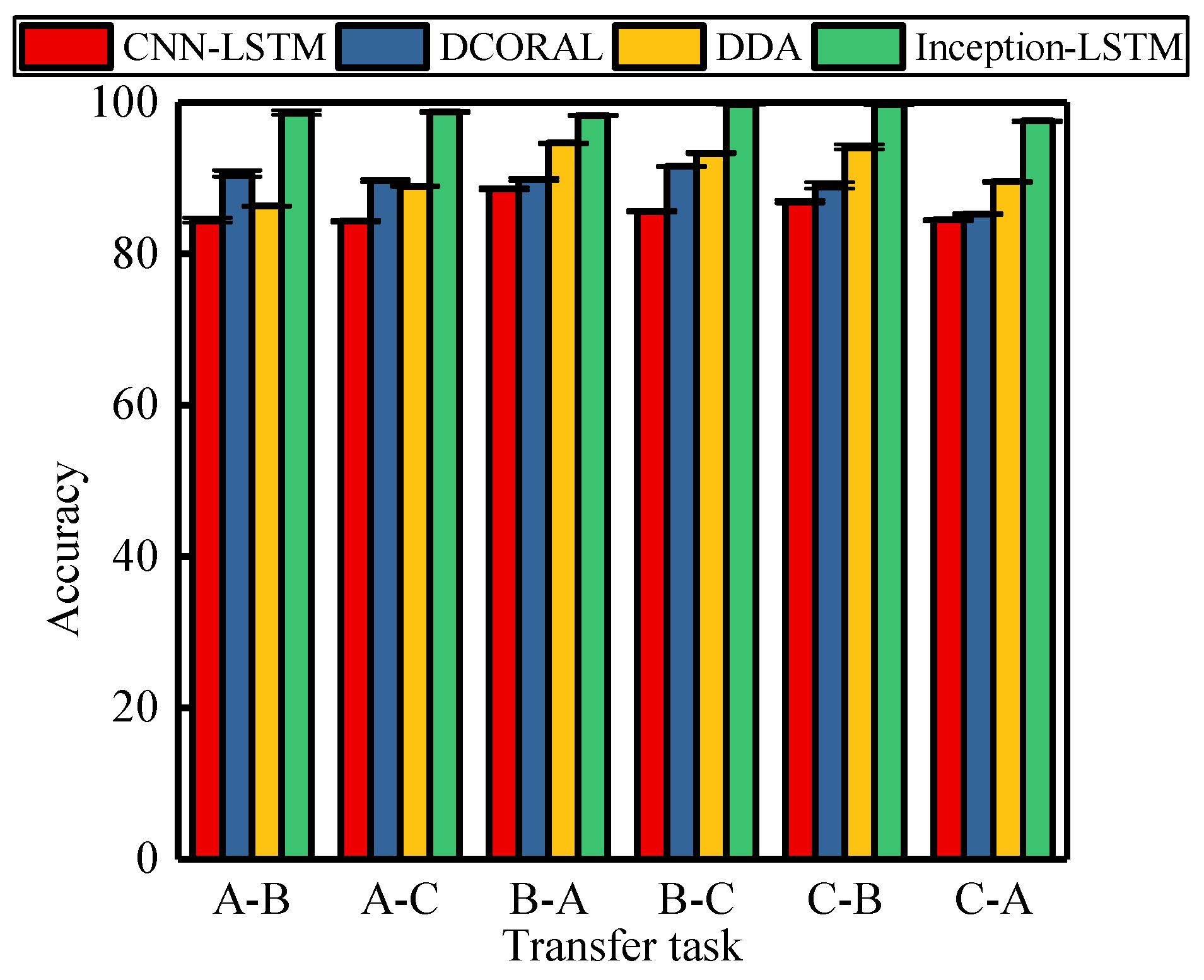
- By combining the MK-MMD method, an intelligent transfer diagnostic framework is established to identify the health condition using cross-domain condition samples. This method can reduce the distribution differences in vibration data and achieve the intelligent transfer diagnosis of roller table and through shaft bearings under different speed conditions in the annealing kiln roller system. Considering the plant scene and operation condition of the glass product line, the verification results from the experimental and measured data show that the intelligent transfer diagnostic model established in this work has high recognition accuracy for the health condition and fault characteristics of roller and through shaft bearings.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abid, A.; Khan, M.T.; Iqbal, J. A review on fault detection and diagnosis techniques: Basics and beyond. Artif. Intell. Rev. 2021, 54, 3639–3664. [Google Scholar] [CrossRef]
- Niu, Y.; Fei, J.; Li, Y.; Wu, D. A novel fault diagnosis method based on EMD, cyclostationary, SK and TPTSR. J. Mech. Sci. Technol. 2020, 34, 1925–1935. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Why EMD and similar decompositions are of little benefit for bearing diagnostics. Mech. Syst. Signal Process. 2023, 192, 110207. [Google Scholar] [CrossRef]
- Zhang, C.; Li, Z.; Hu, C.; Chen, S.; Wang, J.; Zhang, X. An optimized ensemble local mean decomposition method for fault detection of mechanical components. Meas. Sci. Technol. 2017, 28, 035102. [Google Scholar] [CrossRef]
- Li, F.; Li, R.; Tian, L.; Chen, L.; Liu, J. Data-driven time-frequency analysis method based on variational mode decomposition and its application to gear fault diagnosis in variable working conditions. Mech. Syst. Signal Process. 2019, 116, 462–479. [Google Scholar] [CrossRef]
- Imaouchen, Y.; Kedadouche, M.; Alkama, R. A frequency-weighted energy operator and complementary ensemble empirical mode decomposition for bearing fault detection. Mech. Syst. Signal Process. 2017, 82, 103–116. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, Z.; Chen, B.; Zhang, W.; Huang, G. An improved complementary ensemble empirical mode decomposition with adaptive noise and its application to rolling element bearing fault diagnosis. ISA Trans. 2019, 91, 218–234. [Google Scholar] [CrossRef]
- Cheng, J.; Yang, Y.; Hu, N.; Cheng, Z.; Cheng, J. A noise reduction method based on adaptive weighted symplectic geometry decomposition and its application in early gear fault diagnosis. Mech. Syst. Signal Process. 2021, 149, 107351. [Google Scholar] [CrossRef]
- Feng, Z.; Lin, X.; Zuo, M.J. Joint amplitude and frequency demodulation analysis based on intrinsic time-scale decomposition for planetary gearbox fault diagnosis. Mech. Syst. Signal Process. 2016, 72, 223–240. [Google Scholar] [CrossRef]
- Geng, Y.; Pu, W. Quantitative identification of pulse-like ground motions based on intrinsic time-scale decomposition technique. Soil Dyn. Earthq. Eng. 2023, 171, 107977. [Google Scholar] [CrossRef]
- Hu, Y.; Bao, W.; Tu, X.; Li, F.; Li, K. An adaptive spectral kurtosis method and its application to fault detection of rolling element bearings. IEEE Trans. Instrum. Meas. 2020, 69, 739–750. [Google Scholar] [CrossRef]
- Hou, B.; Wang, D.; Yan, T.; Wang, Y.; Peng, Z.; Tsui, K.L. Gini indices II and III two new sparsity measures and their applications to machine condition monitoring. IEEE/ASME Trans. Mechatron. 2022, 27, 1211–1222. [Google Scholar] [CrossRef]
- Dong, H.; Yu, G.; Lin, T.; Li, Y. An energy-concentrated wavelet transform for time-frequency analysis of transient signal. Signal Process. 2023, 206, 108934. [Google Scholar] [CrossRef]
- Zhang, Y.; Xing, K.; Bai, R.; Sun, D.; Meng, Z. An enhanced convolutional neural network for bearing fault diagnosis based on time–frequency image. Measurement 2020, 157, 107667. [Google Scholar] [CrossRef]
- Li, X.; Zheng, J.; Li, M.; Ma, W.; Hu, Y. One-shot neural architecture search for fault diagnosis using vibration signals. Expert Syst. Appl. 2022, 190, 116027. [Google Scholar] [CrossRef]
- Qiao, M.; Yan, S.; Tang, X.; Xu, C. Deep convolutional and LSTM recurrent neural networks for Rolling bearing fault diagnosis under strong noises and variable loads. IEEE Access 2020, 8, 66257–66269. [Google Scholar] [CrossRef]
- Shi, J.; Peng, D.; Peng, Z.; Zhang, Z.; Goebel, K.; Wu, D. Planetary gearbox fault diagnosis using bidirectional-convolutional LSTM networks. Mech. Syst. Signal Process. 2022, 162, 107996. [Google Scholar] [CrossRef]
- Guo, L.; Yu, Y.; Liu, Y.; Gao, H.; Chen, T. Reconstruction domain adaptation transfer network for partial transfer learning of machinery fault diagnostics. IEEE Trans. Instrum. Meas. 2022, 71, 2502710. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, Y.; Deng, J.; Jiang, Y.; Zhang, W. A novel transfer learning method for bearing fault diagnosis under different working conditions. Measurement 2021, 171, 108767. [Google Scholar] [CrossRef]
- Cao, X.; Wang, Y.; Chen, B.; Zeng, N. Domain-adaptive intelligence for fault diagnosis based on deep transfer learning from scientific test rigs to industrial applications. Neural Comput. Appl. 2021, 33, 4483–4499. [Google Scholar] [CrossRef]
- Che, C.; Wang, H.; Ni, X.; Fu, Q. Domain adaptive deep belief network for rolling bearing fault diagnosis. Comput. Ind. Eng. 2020, 143, 106427. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y. Going Deeper with Convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; IEEE: New York, NY, USA, 2015. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; IEEE: New York, NY, USA, 2016; pp. 2818–2826. [Google Scholar]
- Serin, G.; Sener, B.; Ozbayoglu, A.M.; Unver, H.O. Review of tool condition monitoring in machining and opportunities for deep learning. Int. J. Adv. Manuf. Technol. 2020, 109, 953–974. [Google Scholar] [CrossRef]
- Tian, X.; Li, Y.; Liu, T.; Wang, X.; Tao, D. Eigenfunction-based multitask learning in a reproducing kernel hilbert Space. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1818–1830. [Google Scholar] [CrossRef]
- Du, H.; Zhou, Y. Nostradamus: A novel event propagation prediction approach with spatio-temporal characteristics in non-Euclidean space. Neural Netw. 2022, 145, 386–394. [Google Scholar] [CrossRef]
- Qin, Y.; Yao, Q.; Wang, Y.; Mao, Y. Parameter sharing adversarial domain adaptation networks for fault transfer diagnosis of planetary gearboxes. Mech. Syst. Signal Process. 2021, 160, 107936. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Z.; Peng, D.; Cheng, Z. Attention-guided joint learning CNN with noise robustness for bearing fault diagnosis and vibration signal denoising. ISA Trans. 2021, 128, 470–484. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, B.; Gao, D. Bearing fault diagnosis base on multi-scale CNN and LSTM model. J. Intell. Manuf. 2021, 32, 971–987. [Google Scholar] [CrossRef]
- Xiao, R.; Zhang, Z.; Wu, Y.; Jiang, P.; Deng, J. Multi-scale information fusion model for feature extraction of converter transformer vibration signal. Measurement 2021, 180, 109555. [Google Scholar] [CrossRef]
- Shi, H.; Shang, Y. Initial fault diagnosis of rolling bearing based on second-order cyclic autocorrelation and DCAE combined with transfer learning. IEEE Trans. Instrum. Meas. 2022, 71, 3503818. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Parameter Name | Parameter Size | Output Size |
|---|---|---|---|
| Input layer | / | / | Batch size × 128 × 128 |
| Conv | Kernels | 3 × 3 | Batch size × 3 × 128 × 128 |
| Feature fusion module 1 | Kernel | As in Figure 4a | Batch size × 16 × 64 × 64 |
| Mean Pooling | Mean pooling size | 2 × 2 | Batch size × 64 × 32 × 32 |
| Feature fusion module 2 | Kernels | As in Figure 4a | Batch size × 128 × 16 × 16 |
| Mean pooling | Mean pooling size | 2 × 2 | Batch size × 256 × 8 × 8 |
| Dataset | Healthy Condition | Fault Diameter/mm | Training Samples | Testing Samples | Label |
|---|---|---|---|---|---|
| A/B/C 800 r/min/ 1200 r/min/1500 r/min | Normal state | 0 | 300/300/300 | 100/100/100 | 1 |
| 0.3 | 300/300/300 | 100/100/100 | 2 | ||
| ball faults | 0.6 | 300/300/300 | 100/100/100 | 3 | |
| 1.0 | 300/300/300 | 100/100/100 | 4 | ||
| 1.5 | 300/300/300 | 100/100/100 | 5 | ||
| 0.3 | 300/300/300 | 100/100/100 | 6 | ||
| Inner race fault | 0.6 | 300/300/300 | 100/100/100 | 7 | |
| 1.0 | 300/300/300 | 100/100/100 | 8 | ||
| 1.5 | 300/300/300 | 100/100/100 | 9 | ||
| 0.3 | 300/300/300 | 100/100/100 | 10 | ||
| Outer race fault | 0.6 | 300/300/300 | 100/100/100 | 11 | |
| 1.0 | 300/300/300 | 100/100/100 | 12 | ||
| 1.5 | 300/300/300 | 100/100/100 | 13 |
| Experiment | Experiment Method | Average Accuracy/% | Error/% | Time/min |
|---|---|---|---|---|
| Experiment 1 | CNN-LSTM | 85.67 | 3.53 | 86.15 |
| Experiment 2 | DCORAL | 90.52 | 3.54 | 82.46 |
| Experiment 3 | DDA | 94.23 | 1.95 | 92.65 |
| Experiment 4 | The proposed method | 99.11 | 0.86 | 97.92 |
| Method | CNN-LSTM | DCORAL | DDA | The Proposed Method |
|---|---|---|---|---|
| Accuracy/% | 86.30769 ± 0.05015 | 91.84615 ± 0.02794 | 93.84615 ± 0.01738 | 99.84615 ± 0.08406 |
| Time/min | 45.53 | 37.23 | 48.61 | 72.53 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xin, Y.; Zhou, K.; Liu, S.; Liu, T. A Variable-Scale Attention Mechanism Guided Time-Frequency Feature Fusion Transfer Learning Method for Bearing Fault Diagnosis in an Annealing Kiln Roller System. Appl. Sci. 2024, 14, 3434. https://doi.org/10.3390/app14083434
Xin Y, Zhou K, Liu S, Liu T. A Variable-Scale Attention Mechanism Guided Time-Frequency Feature Fusion Transfer Learning Method for Bearing Fault Diagnosis in an Annealing Kiln Roller System. Applied Sciences. 2024; 14(8):3434. https://doi.org/10.3390/app14083434
Chicago/Turabian StyleXin, Yu, Kangqu Zhou, Songlin Liu, and Tianchuang Liu. 2024. "A Variable-Scale Attention Mechanism Guided Time-Frequency Feature Fusion Transfer Learning Method for Bearing Fault Diagnosis in an Annealing Kiln Roller System" Applied Sciences 14, no. 8: 3434. https://doi.org/10.3390/app14083434