

Enhancing Wireless Sensor Network in Structural Health Monitoring through TCP/IP Socket Programming-Based Mimic Broadcasting: Experimental Validation

 ,
,  , and
, and
Abstract
:1. Introduction
- Effective scheduling and execution of measurement tasks:The proposed approach incorporates the use of multi-threading techniques during the data streaming process. The utilization of multi-threading enhances the scheduling and execution of measurement tasks, ensuring efficient data storage and management.
- Synchronization mechanisms between nodes for accurate data alignment: A novel method for synchronous sensing, utilizing a mimic broadcasting mechanism, is presented to achieve the initial alignment of acceleration data from different sensor nodes. Additionally, NTP is implemented using chrony, while the DS3231 RTC module is employed to establish a temporal reference. This approach ensures the comprehensive and reliable collection of data from multiple end nodes and facilitates the initialization of a synchronized start schedule for multiple end nodes from a centralized gateway.
- Scalability of the network to accommodate expanding sensor deployments: The proposed system offers a scalable solution for sensor deployments. The system allows for the flexible addition of end nodes to the network.
- Seamless communication and networking capabilities: The integration of TCP/IP socket programming provides seamless communication and networking capabilities between the end nodes and the gateway. This integration ensures efficient data transmission and real-time monitoring of the sensor network. The comprehensive explanation of the implementation of socket programming is provided in detail.
- Sufficient data storage capacity to manage the substantial volume of collected data: The implementation of multi-threading techniques enables simultaneous data storage on both the end nodes and the gateway’s local micro SD cards. This ensures the availability of ample data storage capacity to manage the substantial volume of collected data.
- Precise time-alignment method for acceleration time history from wireless sensor nodes: This study underscores the significance of employing Dynamic Time Warping (DTW) for achieving precise time alignment in the context of Structural Health Monitoring (SHM) applications. DTW, originally introduced as dynamic programming by Sakoe and Chiba in 1978 [47], serves as a powerful technique for time optimization in time series data.
2. Materials and Methods
2.1. Overview of IoT Protocols
2.2. TCP/IP Socket
2.3. System Description
2.3.1. Sensor Node and Gateway Device
2.3.2. Server Socket
2.3.3. Client Socket
2.3.4. Synchronization Method
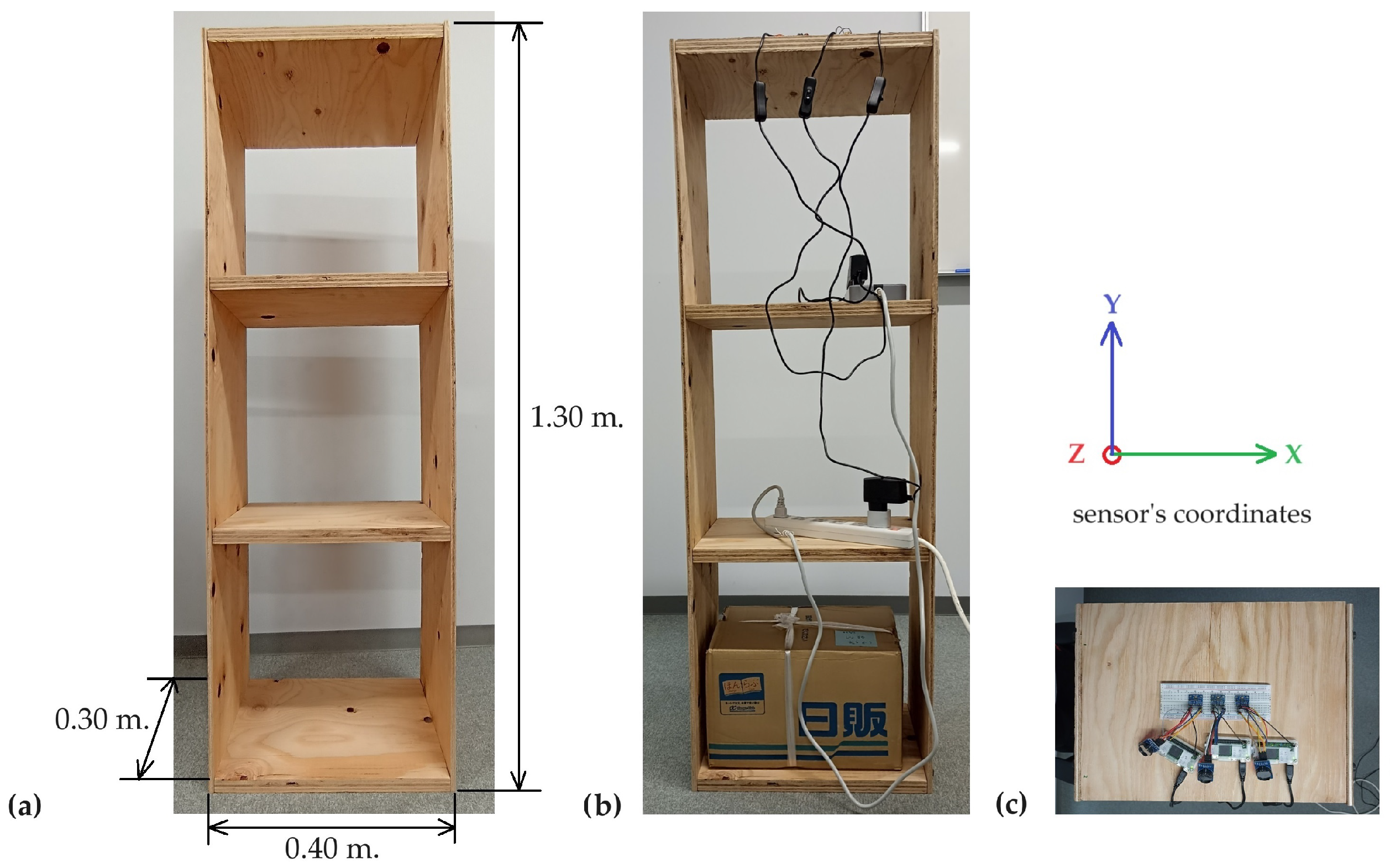
2.3.5. Experimental Setup and Verification
Synchronization Validation
The Application of Frequency Domain Decomposition
- If is greater than 100 Hz, the detrended signal is downsampled using the decimation method as
- If is less than 100 Hz, the detrended signal is upsampled using the interpolation method as
3. Experimental Results
3.1. Evaluation of Synchronization Performance
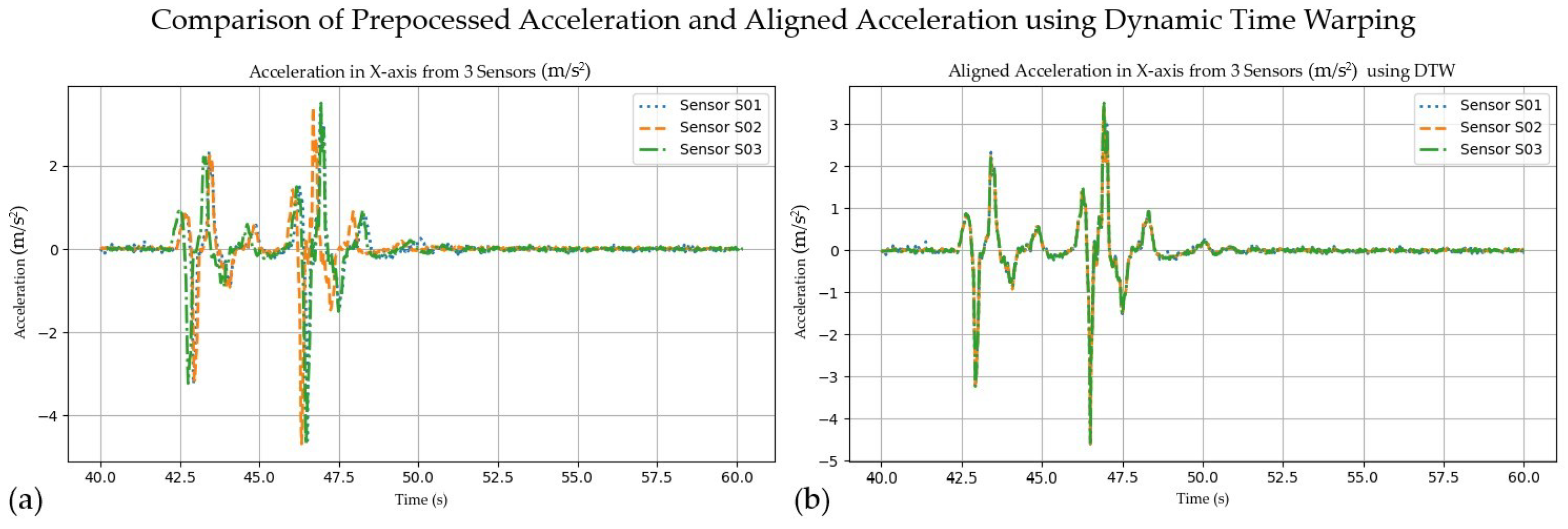
3.2. Analysis of Precise Time Alignment Using DTW
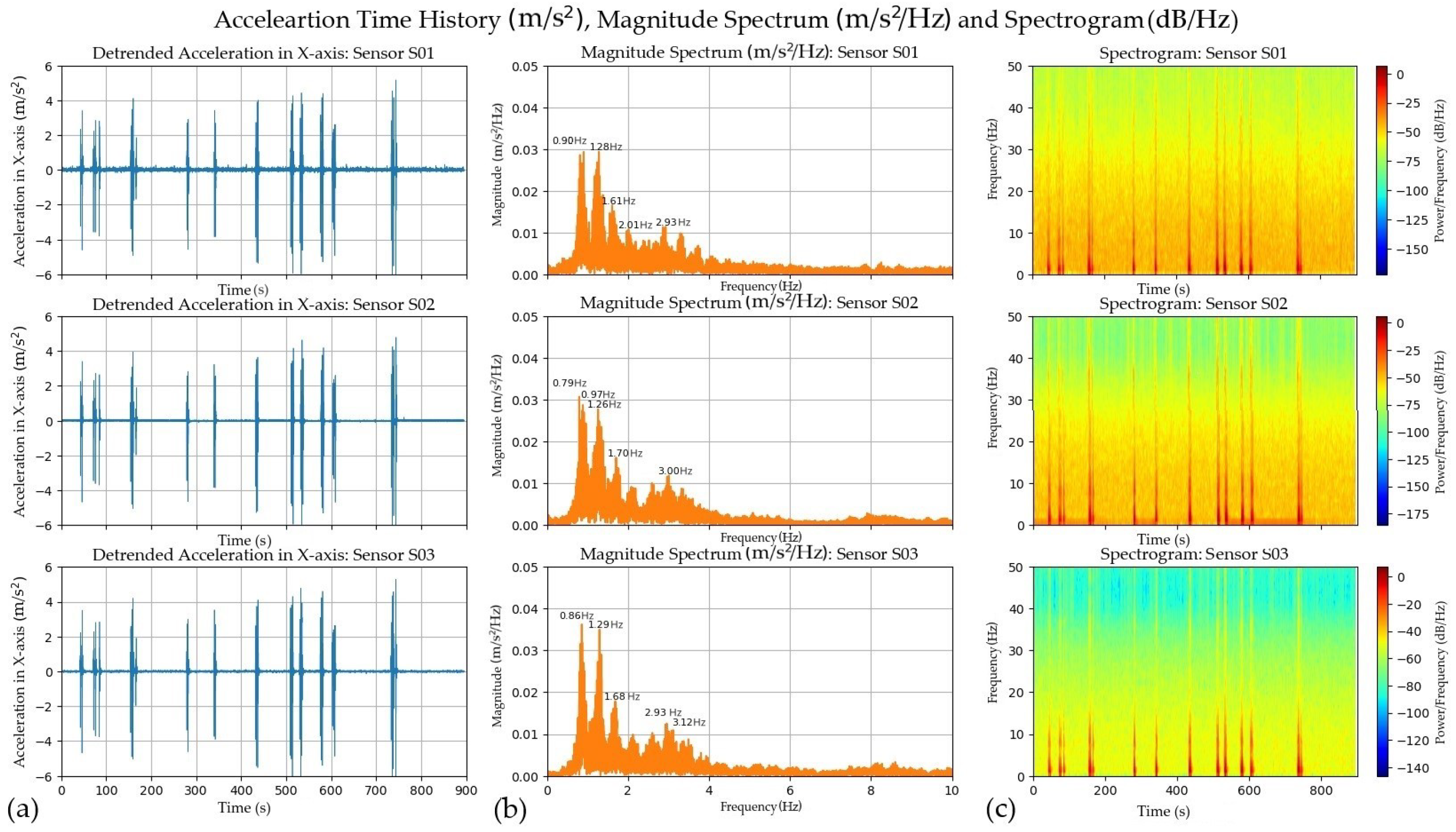
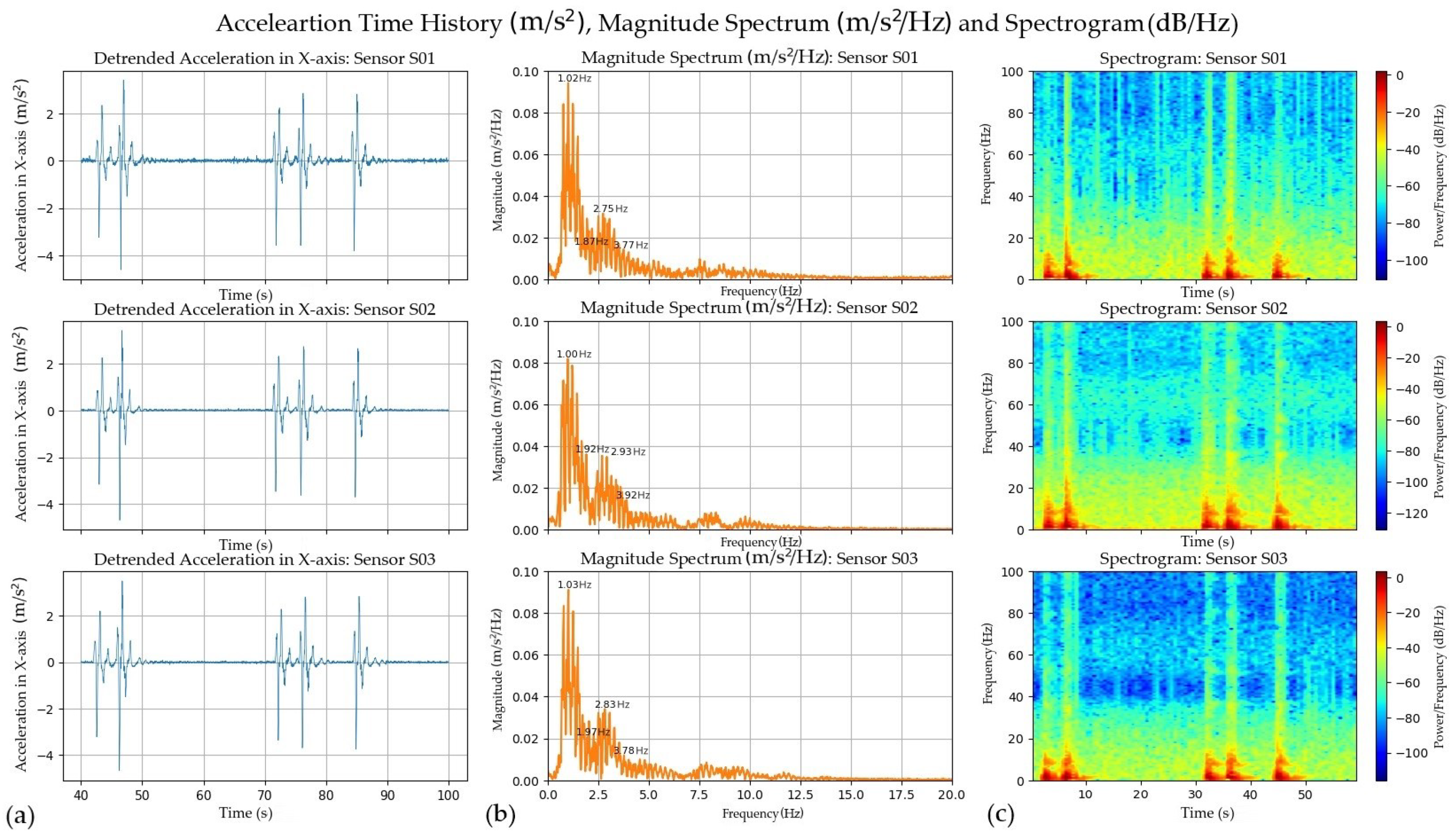
3.3. Analysis of Structural Response Using FDD
4. Discussion and Future Works
Limitations and Considerations for Future Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
| Algorithm A1 Measure Time from NTP (Multiple Experiments) |
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Time Difference of the Experiment No. (Seconds) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| 1 | 1.98365 | 1.93762 | 2.13888 | 2.19704 | 2.15008 | 2.05739 | 2.02428 | Error | - | - |
| 2 | 2.07877 | 2.09752 | 2.03200 | 2.16679 | 2.13682 | 2.10096 | 2.19047 | 2.18057 | 2.05075 | 2.03307 |
| 3 | 2.02522 | 2.10828 | 2.19680 | 2.02330 | 2.09053 | 1.98940 | Error | - | - | |
| 4 | 1.93804 | 2.04074 | 2.08322 | 2.08045 | 2.07417 | 2.00841 | 2.22313 | 2.34317 | 1.93583 | 1.96760 |
| 5 | 1.87368 | 1.99403 | 2.20394 | 2.18445 | 2.21096 | 2.04569 | 2.02096 | 2.10654 | 2.23475 | 2.16026 |
| 6 | 2.27508 | 2.55489 | Error | - | - | - | - | - | - | - |
| 7 | 2.08454 | 2.12434 | 2.20702 | 2.19922 | 2.22640 | 2.26072 | 2.28497 | Error | - | - |
| 8 | 2.28557 | 2.37097 | 2.28230 | 2.37224 | 2.57349 | 2.33824 | 2.35139 | 2.40754 | 2.30306 | 2.25227 |
| 9 | Error | - | - | - | - | - | - | - | - | - |
| 10 | 2.67396 | 2.29190 | 2.11355 | 1.99394 | 2.12921 | 2.16127 | 2.24713 | 2.03871 | 2.17392 | 2.09608 |

References
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Hussein, M.; Gabbouj, M.; Inman, D.J. A review of vibration-based damage detection in civil structures: From traditional methods to Machine Learning and Deep Learning applications. Mech. Syst. Signal Process. 2021, 147, 107077. [Google Scholar] [CrossRef]
- Tiboni, M.; Remino, C.; Bussola, R.; Amici, C. A review on vibration-based condition monitoring of rotating machinery. Appl. Sci. 2022, 12, 972. [Google Scholar] [CrossRef]
- Huffman, J.T.; Xiao, F.; Chen, G.; Hulsey, J.L. Detection of soil-abutment interaction by monitoring bridge response using vehicle excitation. J. Civ. Struct. Health Monit. 2015, 5, 389–395. [Google Scholar] [CrossRef]
- Xiao, F.; Hulsey, J.L.; Balasubramanian, R. Fiber optic health monitoring and temperature behavior of bridge in cold region. Struct. Control Health Monit. 2017, 24, e2020. [Google Scholar] [CrossRef]
- Xiao, F.; Chen, G.S.; Hulsey, J.L. Monitoring bridge dynamic responses using fiber Bragg grating tiltmeters. Sensors 2017, 17, 2390. [Google Scholar] [CrossRef]
- Xiao, F.; Hulsey, J.L.; Chen, G.S.; Xiang, Y. Optimal static strain sensor placement for truss bridges. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147717707929. [Google Scholar] [CrossRef]
- Amezquita-Sanchez, J.P.; Adeli, H. Signal processing techniques for vibration-based health monitoring of smart structures. Arch. Comput. Methods Eng. 2016, 23, 1–15. [Google Scholar] [CrossRef]
- Xiao, F.; Chen, G.S.; Zatar, W.; Hulsey, J.L. Signature extraction from the dynamic responses of a bridge subjected to a moving vehicle using complete ensemble empirical mode decomposition. J. Low Freq. Noise Vib. Act. Control 2021, 40, 278–294. [Google Scholar] [CrossRef]
- Barbosh, M.; Singh, P.; Sadhu, A. Empirical mode decomposition and its variants: A review with applications in structural health monitoring. Smart Mater. Struct. 2020, 29, 093001. [Google Scholar] [CrossRef]
- Hassan, Q.F. Internet of Things A to Z: Technologies and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Yang, Y.; Zhong, M.; Yao, H.; Yu, F.; Fu, X.; Postolache, O. Internet of things for smart ports: Technologies and challenges. IEEE Instrum. Meas. Mag. 2018, 21, 34–43. [Google Scholar] [CrossRef]
- Tokognon, C.A.; Gao, B.; Tian, G.Y.; Yan, Y. Structural health monitoring framework based on Internet of Things: A survey. IEEE Internet Things J. 2017, 4, 619–635. [Google Scholar] [CrossRef]
- Haque, M.E.; Asikuzzaman, M.; Khan, I.U.; Ra, I.H.; Hossain, M.S.; Shah, S.B.H. Comparative study of IoT-based topology maintenance protocol in a wireless sensor network for structural health monitoring. Remote Sens. 2020, 12, 2358. [Google Scholar] [CrossRef]
- Villa, V.; Naticchia, B.; Bruno, G.; Aliev, K.; Piantanida, P.; Antonelli, D. IoT open-source architecture for the maintenance of building facilities. Appl. Sci. 2021, 11, 5374. [Google Scholar] [CrossRef]
- Mishra, M.; Lourenço, P.B.; Ramana, G.V. Structural health monitoring of civil engineering structures by using the internet of things: A review. J. Build. Eng. 2022, 48, 103954. [Google Scholar] [CrossRef]
- Varanis, M.; Silva, A.; Mereles, A.; Pederiva, R. MEMS accelerometers for mechanical vibrations analysis: A comprehensive review with applications. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 527. [Google Scholar] [CrossRef]
- Sabato, A.; Niezrecki, C.; Fortino, G. Wireless MEMS-based accelerometer sensor boards for structural vibration monitoring: A review. IEEE Sens. J. 2016, 17, 226–235. [Google Scholar] [CrossRef]
- Bravo-Haro, M.; Ding, X.; Elghazouli, A. MEMS-based low-cost and open-source accelerograph for earthquake strong-motion. Eng. Struct. 2021, 230, 111675. [Google Scholar] [CrossRef]
- Barzegar, M.; Blanks, S.; Sainsbury, B.A.; Timms, W. MEMS technology and applications in geotechnical monitoring: A review. Meas. Sci. Technol. 2022, 33, 052001. [Google Scholar] [CrossRef]
- Albarbar, A.; Mekid, S.; Starr, A.; Pietruszkiewicz, R. Suitability of MEMS accelerometers for condition monitoring: An experimental study. Sensors 2008, 8, 784–799. [Google Scholar] [CrossRef]
- Ribeiro, R.R.; Lameiras, R.d.M. Evaluation of low-cost MEMS accelerometers for SHM: Frequency and damping identification of civil structures. Lat. Am. J. Solids Struct. 2019, 16, e203. [Google Scholar] [CrossRef]
- Lee, J.; Khan, I.; Choi, S.; Kwon, Y.W. A smart iot device for detecting and responding to earthquakes. Electronics 2019, 8, 1546. [Google Scholar] [CrossRef]
- Ali, A.; Sandhu, T.Y.; Usman, M. Ambient vibration testing of a pedestrian bridge using low-cost accelerometers for SHM applications. Smart Cities 2019, 2, 20–30. [Google Scholar] [CrossRef]
- Omidalizarandi, M.; Herrmann, R.; Kargoll, B.; Marx, S.; Paffenholz, J.A.; Neumann, I. A validated robust and automatic procedure for vibration analysis of bridge structures using MEMS accelerometers. J. Appl. Geod. 2020, 14, 327–354. [Google Scholar] [CrossRef]
- Khan, S.M.; Hanif, M.U.; Khan, A.; Hassan, M.U.; Javanmardi, A.; Ahmad, A. Damage assessment of reinforced concrete beams using cost-effective MEMS accelerometers. In Structures; Elsevier: Amsterdam, The Netherlands, 2022; Volume 41, pp. 602–618. [Google Scholar]
- Caballero-Russi, D.; Ortiz, A.R.; Guzmán, A.; Canchila, C. Design and Validation of a Low-Cost Structural Health Monitoring System for Dynamic Characterization of Structures. Appl. Sci. 2022, 12, 2807. [Google Scholar] [CrossRef]
- El Dahr, R.; Lignos, X.; Papavieros, S.; Vayas, I. Design and Validation of an Accurate Low-Cost Data Acquisition System for Structural Health Monitoring of a Pedestrian Bridge. J. Civ. Eng. Constr. 2022, 11, 113–126. [Google Scholar] [CrossRef]
- Sarkar, S.K.; Basavaraju, T.G.; Puttamadappa, C. Ad Hoc Mobile Wireless Networks: Principles, Protocols and Applications; Auerbach Publications: Boca Raton, FL, USA, 2007. [Google Scholar]
- Sarkar, A.; Murugan, T.S. Routing protocols for wireless sensor networks: What the literature says? Alex. Eng. J. 2016, 55, 3173–3183. [Google Scholar] [CrossRef]
- Zyrianoff, I.; Gigli, L.; Montori, F.; Sciullo, L.; Kamienski, C.; Di Felice, M. Cache-it: A distributed architecture for proactive edge caching in heterogeneous iot scenarios. Ad Hoc Netw. 2024, 156, 103413. [Google Scholar] [CrossRef]
- Hasan, K.F.; Wang, C.; Feng, Y.; Tian, Y.C. Time synchronization in vehicular ad-hoc networks: A survey on theory and practice. Veh. Commun. 2018, 14, 39–51. [Google Scholar] [CrossRef]
- Dhall, R.; Dhongdi, S. Review of protocol stack development of flying ad-hoc networks for disaster monitoring applications. Arch. Comput. Methods Eng. 2023, 30, 37–68. [Google Scholar] [CrossRef]
- De Angelis, A.; Santoni, F.; Carbone, P.; Cecconi, M.; Vecchietti, A.; Di Lorenzo, F. Development of an IoT Structural Monitoring System Applied to a Hypogeal Site. Sensors 2020, 20, 6769. [Google Scholar] [CrossRef]
- AbdelRaheem, M.; Hassan, M.; Mohammed, U.S.; Nassr, A.A. Design and implementation of a synchronized IoT-based structural health monitoring system. Internet Things 2022, 20, 100639. [Google Scholar] [CrossRef]
- Fort, E.H.; Blanco-Carmona, P.; Garcia-Oya, J.R.; Muñoz-Chavero, F.; Gonzalez-Carvajal, R.; Serrano-Chacon, A.R.; Mascort-Albea, E.J. Wireless and Low-Power System for Synchronous and Real-Time Structural-Damage Assessment. IEEE Sen. J. 2023, 23, 13648–13658. [Google Scholar] [CrossRef]
- Cho, H.; Jung, J.; Cho, B.; Jin, Y.; Lee, S.W.; Baek, Y. Precision time synchronization using IEEE 1588 for wireless sensor networks. In Proceedings of the 2009 International Conference on Computational Science and Engineering, Vancouver, BC, Canada, 29–31 August 2009; IEEE: Piscateville, NJ, USA, 2009; Volume 2, pp. 579–586. [Google Scholar]
- Gao, S.; Dai, X.; Liu, Z.; Tian, G. High-performance wireless piezoelectric sensor network for distributed structural health monitoring. Int. J. Distrib. Sens. Netw. 2016, 12, 3846804. [Google Scholar] [CrossRef]
- Jornet-Monteverde, J.A.; Galiana-Merino, J.J.; Soler-Llorens, J.L. Design and implementation of a wireless sensor network for seismic monitoring of buildings. Sensors 2021, 21, 3875. [Google Scholar] [CrossRef] [PubMed]
- Meng, Q.; Zhu, S. Developing iot sensing system for construction-induced vibration monitoring and impact assessment. Sensors 2020, 20, 6120. [Google Scholar] [CrossRef] [PubMed]
- Barsocchi, P.; Bartoli, G.; Betti, M.; Girardi, M.; Mammolito, S.; Pellegrini, D.; Zini, G. Wireless sensor networks for continuous structural health monitoring of historic masonry towers. Int. J. Archit. Herit. 2021, 15, 22–44. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Lozano, F.; Lozano-Galant, J.A.; Ramos, G.; Turmo, J. Low-cost wireless structural health monitoring of bridges. Sensors 2022, 22, 5725. [Google Scholar] [CrossRef] [PubMed]
- Balakrishnan, K.; Dhanalakshmi, R.; Sinha, B.B.; Gopalakrishnan, R. Clock synchronization in industrial Internet of Things and potential works in precision time protocol: Review, challenges and future directions. Int. J. Cogn. Comput. Eng. 2023, 4, 205–219. [Google Scholar]
- Komarizadehasl, S.; Huguenet, P.; Lozano, F.; Lozano-Galant, J.A.; Turmo, J. Operational and analytical modal analysis of a bridge using low-cost wireless Arduino-based accelerometers. Sensors 2022, 22, 9808. [Google Scholar] [CrossRef]
- Rocha Ribeiro, R.; de Almeida Sobral, R.; Cavalcante, I.B.; Conte Mendes Veloso, L.A.; de Melo Lameiras, R. A Low-Cost Wireless Multinode Vibration Monitoring System for Civil Structures. Struct. Control Health Monit. 2023, 2023, 5240059. [Google Scholar] [CrossRef]
- Dinar, A.E.; Merabet, B.; Ghouali, S. NTP Server Clock Adjustment with Chrony. In Applications of Internet of Things: Proceedings of ICCCIOT 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 177–185. [Google Scholar]
- Chowdhury, D.D. Packet timing: Network time protocol. In NextGen Network Synchronization; Springer: Berlin/Heidelberg, Germany, 2021; pp. 103–116. [Google Scholar]
- Sakoe, H.; Chiba, S. Dynamic programming algorithm optimization for spoken word recognition. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 43–49. [Google Scholar] [CrossRef]
- Silva, D.; Carvalho, L.I.; Soares, J.; Sofia, R.C. A performance analysis of internet of things networking protocols: Evaluating MQTT, CoAP, OPC UA. Appl. Sci. 2021, 11, 4879. [Google Scholar] [CrossRef]
- Basavaraju, N.; Alexander, N.; Seitz, J. Performance Evaluation of Advanced Message Queuing Protocol (AMQP): An Empirical Analysis of AMQP Online Message Brokers. In Proceedings of the 2021 International Symposium on Networks, Computers and Communications (ISNCC), Dubai, United Arab Emirates, 31 October–2 November 2021; IEEE: Piscateville, NJ, USA, 2021; pp. 1–8. [Google Scholar]
- Ioana, A.; Korodi, A. DDS and OPC UA protocol coexistence solution in real-time and industry 4.0 context using non-ideal infrastructure. Sensors 2021, 21, 7760. [Google Scholar] [CrossRef] [PubMed]
- Wytrębowicz, J.; Cabaj, K.; Krawiec, J. Messaging protocols for IoT systems—A pragmatic comparison. Sensors 2021, 21, 6904. [Google Scholar] [CrossRef] [PubMed]
- Ajayi, O.; Bagula, A.; Bode, J.; Damon, M. A Comparison of Publish-Subscribe and Client-Server Models for Streaming IoT Telemetry Data. In Proceedings of the International Conference on Emerging Technologies for Developing Countries, Bloemfontein, South Africa, 5–7 December 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 129–139. [Google Scholar]
- Yassein, M.B.; Shatnawi, M.Q.; Aljwarneh, S.; Al-Hatmi, R. Internet of Things: Survey and open issues of MQTT protocol. In Proceedings of the 2017 International Conference on Engineering & MIS (ICEMIS), Monastir, Tunisia, 8–10 May 2017; IEEE: Piscateville, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Bayılmış, C.; Ebleme, M.A.; Çavuşoğlu, Ü.; Kücük, K.; Sevin, A. A survey on communication protocols and performance evaluations for Internet of Things. Digit. Commun. Netw. 2022, 8, 1094–1104. [Google Scholar] [CrossRef]
- Oliveira, G.M.; Costa, D.C.; Cavalcanti, R.J.; Oliveira, J.P.; Silva, D.R.; Nogueira, M.B.; Rodrigues, M.C. Comparison between MQTT and WebSocket protocols for Iot applications using ESP8266. In Proceedings of the 2018 Workshop on Metrology for Industry 4.0 and IoT, Brescia, Italy, 16–18 April 2018; IEEE: Piscateville, NJ, USA, 2018; pp. 236–241. [Google Scholar]
- McMillan, G. Socket Programming HOWTO. 2024. Available online: https://docs.python.org/3/howto/sockets.html#socket-howto (accessed on 8 February 2024).
- Analog Devices. ADXL345: Small, Low Power, 3-Axis Accelerometer. 2024. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/adxl345.pdf (accessed on 8 February 2024).
- Fu, Y.; Hoang, T.; Mechitov, K.; Kim, J.R.; Zhang, D.; Spencer, B.F., Jr. Sudden event monitoring of civil infrastructure using demand-based wireless smart sensors. Sensors 2018, 18, 4480. [Google Scholar] [CrossRef]
- Alarcón, M.; Soto, P.; Hernández, F.; Guindos, P. Structural health monitoring of South America’s first 6-Story experimental light-frame timber-building by using a low-cost RaspberryShake seismic instrumentation. Eng. Struct. 2023, 275, 115278. [Google Scholar] [CrossRef]
- Iwaniec, M.; Holovatyy, A.; Teslyuk, V.; Lobur, M.; Kolesnyk, K.; Mashevska, M. Development of vibration spectrum analyzer using the Raspberry Pi microcomputer and 3-axis digital MEMS accelerometer ADXL345. In Proceedings of the 2017 XIIIth International Conference on Perspective Technologies and Methods in MEMS Design (MEMSTECH), Lviv, Ukraine, 20–23 April 2017; IEEE: Piscateville, NJ, USA, 2017; pp. 25–29. [Google Scholar]
- Gao, S.; Zhang, X.; Du, C.; Ji, Q. A multichannel low-power wide-area network with high-accuracy synchronization ability for machine vibration monitoring. IEEE Internet Things J. 2019, 6, 5040–5047. [Google Scholar] [CrossRef]
- Ghazali, M.H.M.; Rahiman, W. An investigation of the reliability of different types of sensors in the real-time vibration-based anomaly inspection in drone. Sensors 2022, 22, 6015. [Google Scholar] [CrossRef]
- Cañete, E.; Chen, J.; Díaz, M.; Llopis, L.; Rubio, B. Sensor4PRI: A sensor platform for the protection of railway infrastructures. Sensors 2015, 15, 4996–5019. [Google Scholar] [CrossRef]
- Holovatyy, A.; Teslyuk, V.; Iwaniec, M.; Mashevska, M. Development of a system for monitoring vibration accelerations based on the raspberry pi microcomputer and the adxl345 accelerometer. East.-Eur. J. Enterp. Technol. 2017, 6, 52–62. [Google Scholar] [CrossRef]
- Chang, H.F.; Shokrolah Shirazi, M. Integration with 3D visualization and IoT-based sensors for real-time structural health monitoring. Sensors 2021, 21, 6988. [Google Scholar] [CrossRef]
- Vijayan, D. Prediction of displacement in Reinforced concrete based on artificial neural networks using sensors. Meas. Sens. 2023, 27, 100764. [Google Scholar]
- Rehman, S.U.; Usman, M.; Toor, M.H.Y.; Hussaini, Q.A. Advancing structural health monitoring: A vibration-based IoT approach for remote real-time systems. Sen. Actuators A Phys. 2024, 365, 114863. [Google Scholar] [CrossRef]
- The Chrony Project. Chrony Documentation. Available online: https://chrony-project.org/documentation.html (accessed on 17 April 2024).
- Choudhury, M.D.; Hong, L.; Dhupia, J.S. A methodology to handle spectral smearing in gearboxes using adaptive mode decomposition and dynamic time warping. IEEE Trans. Instrum. Meas. 2021, 70, 3510910. [Google Scholar] [CrossRef]
- Courty, N.; Flamary, R.; Tuia, D.; Rakotomamonjy, A. Optimal transport for domain adaptation. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1853–1865. [Google Scholar] [CrossRef]
- Liu, Y.T.; Zhang, Y.A.; Zeng, M. Adaptive global time sequence averaging method using dynamic time warping. IEEE Trans. Signal Process. 2019, 67, 2129–2142. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L. Frequency domain decomposition revisited. In Proceedings of the 3rd International Operational Modal Analysis Conference-IOMAC, Portonovo, Italy, 4–6 May 2009; Starrylink Editrice: Brescia, Italy, 2009; p. 615. [Google Scholar]
- Python Cryptography Package on PyPI. Available online: https://pypi.org/project/cryptography/ (accessed on 16 April 2024).
- Ssl—TLS/SSL Wrapper. Available online: https://docs.python.org/3/library/ssl.html (accessed on 16 April 2024).
- Salvador, S.; Chan, P. Toward accurate dynamic time warping in linear time and space. Intell. Data Anal. 2007, 11, 561–580. [Google Scholar] [CrossRef]














| Reference | Clock Module | Wireless Technology | Number of End Nodes |
|---|---|---|---|
| [33] | GPS 1 | LoRa 2 | 2 |
| [34] | GPS 1 | TCP/IP 3 via Wi-Fi and 4G | 5 |
| [35] | GPS 1 | NB-IoT 5 | 10 |
| [38] | NTP 4 | TCP/IP 3 via Wi-Fi | 2 |
| [39] | NTP 4 | 4G | N/A |
| [40] | NTP 4 | MQTT 6 broker and 4G | N/A |
| [41] | NTP 4 | 4G | N/A |
| [43] | NTP 4 | 4G | N/A |
| Aspect | Experimental Study Proposed by Authors | Future Research Direction |
|---|---|---|
| Validate the system in real-field scenarios | Demonstrated feasibility in controlled environment. | Conduct field tests to validate real-world performance. |
| Explore scalability in larger networks | Focused on local wireless sensor network with star typology. | Investigate scalability to larger networks with different typologies. |
| Opting tree and complex cluster-tree typologies are preferable. | ||
| Address environmental factors | The environmental impact on sensor measurements was not extensively discussed since the study was conducted in a controlled environment. Only linear detrend was applied in this study. | Collect experimental data and analyze the system’s performance under different environmental conditions. |
| Explore the integration of ML algorithms to enhance sensor accuracy for adaptive calibration of measurements. | ||
| Ensure long-term stability and maintenance | The study proposed the initial evaluation on a lab scale. | Investigate the system’s performance over an extended period and develop maintenance strategies. |
| Integrate ML algorithms to predict maintenance needs based on environmental data. | ||
| Synchronization methods | The study focused on Chrony NTP synchronization due to its ease of use and suitability for low sampling rates. | Conduct comparative studies with alternative synchronization methods. |
| PTP and PPS-GPS integrated with Chrony can be enhanced the performance, accuracy, and efficiency in higher sampling rate applications. | ||
| Data security | The experimental study did not discuss data security measures. | Investigate and implement appropriate data security mechanisms, such as AES encryption, authentication, and SSL/TLS protocols, to protect sensitive sensor data from unauthorized access or tampering in real-world applications. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nilnoree, S.; Taparugssanagorn, A.; Kaemarungsi, K.; Mizutani, T. Enhancing Wireless Sensor Network in Structural Health Monitoring through TCP/IP Socket Programming-Based Mimic Broadcasting: Experimental Validation. Appl. Sci. 2024, 14, 3494. https://doi.org/10.3390/app14083494
Nilnoree S, Taparugssanagorn A, Kaemarungsi K, Mizutani T. Enhancing Wireless Sensor Network in Structural Health Monitoring through TCP/IP Socket Programming-Based Mimic Broadcasting: Experimental Validation. Applied Sciences. 2024; 14(8):3494. https://doi.org/10.3390/app14083494
Chicago/Turabian StyleNilnoree, Srikulnath, Attaphongse Taparugssanagorn, Kamol Kaemarungsi, and Tsukasa Mizutani. 2024. "Enhancing Wireless Sensor Network in Structural Health Monitoring through TCP/IP Socket Programming-Based Mimic Broadcasting: Experimental Validation" Applied Sciences 14, no. 8: 3494. https://doi.org/10.3390/app14083494