
Spatial Statistical Analysis of Urban Noise Data from a WASN Gathered by an IoT System: Application to a Small City


 ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Material and Method
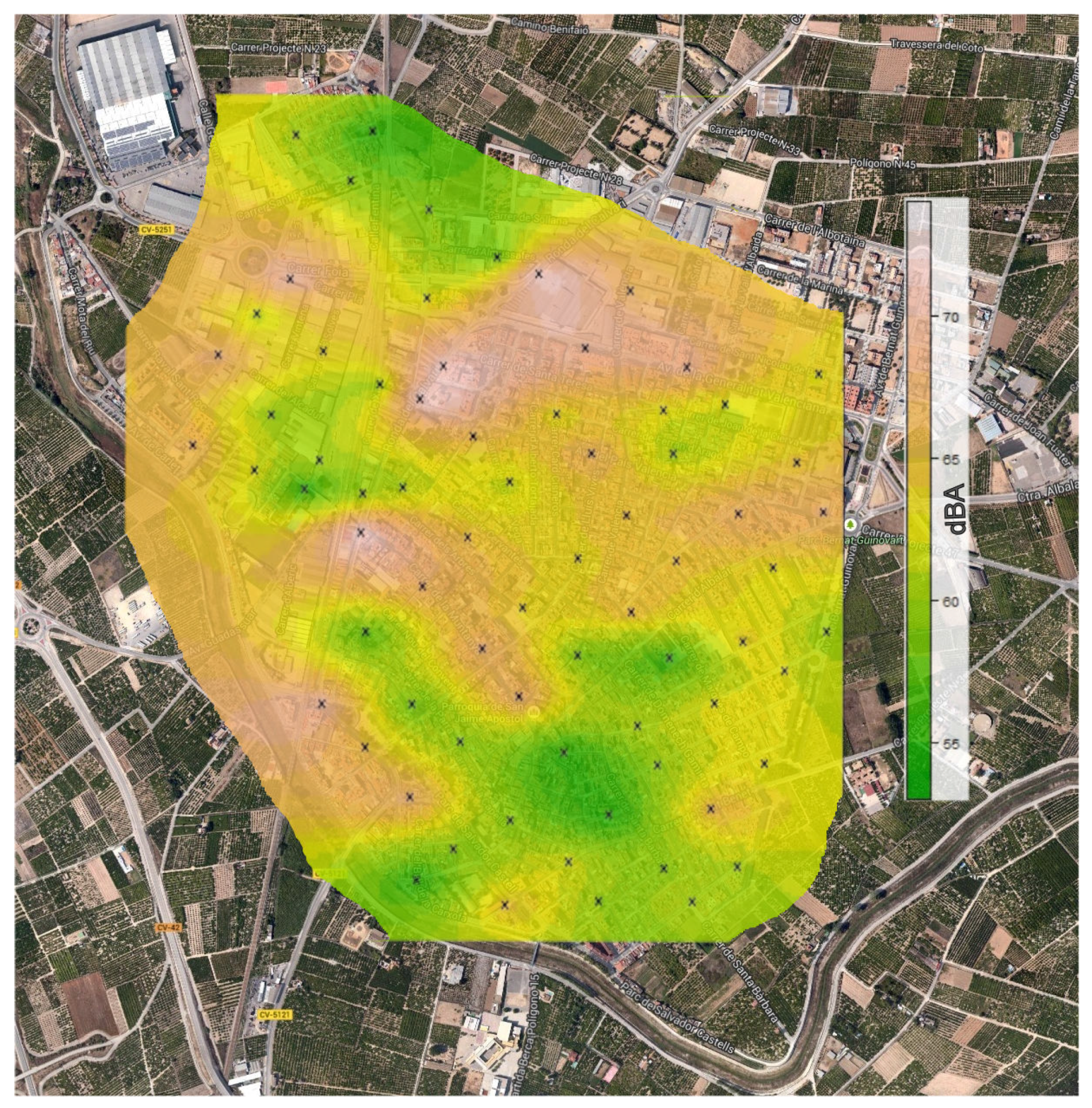
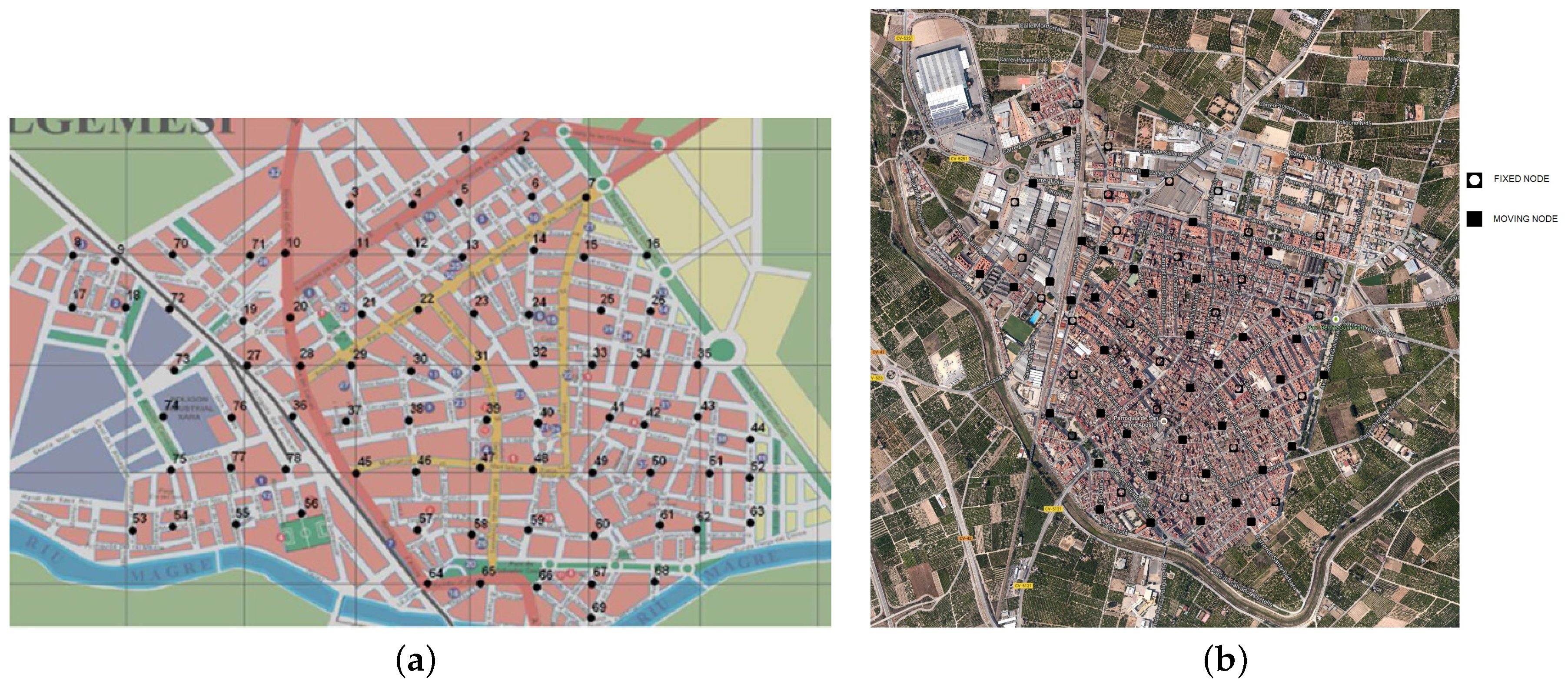
2.1. The City
2.2. The Network
2.3. The Measurements
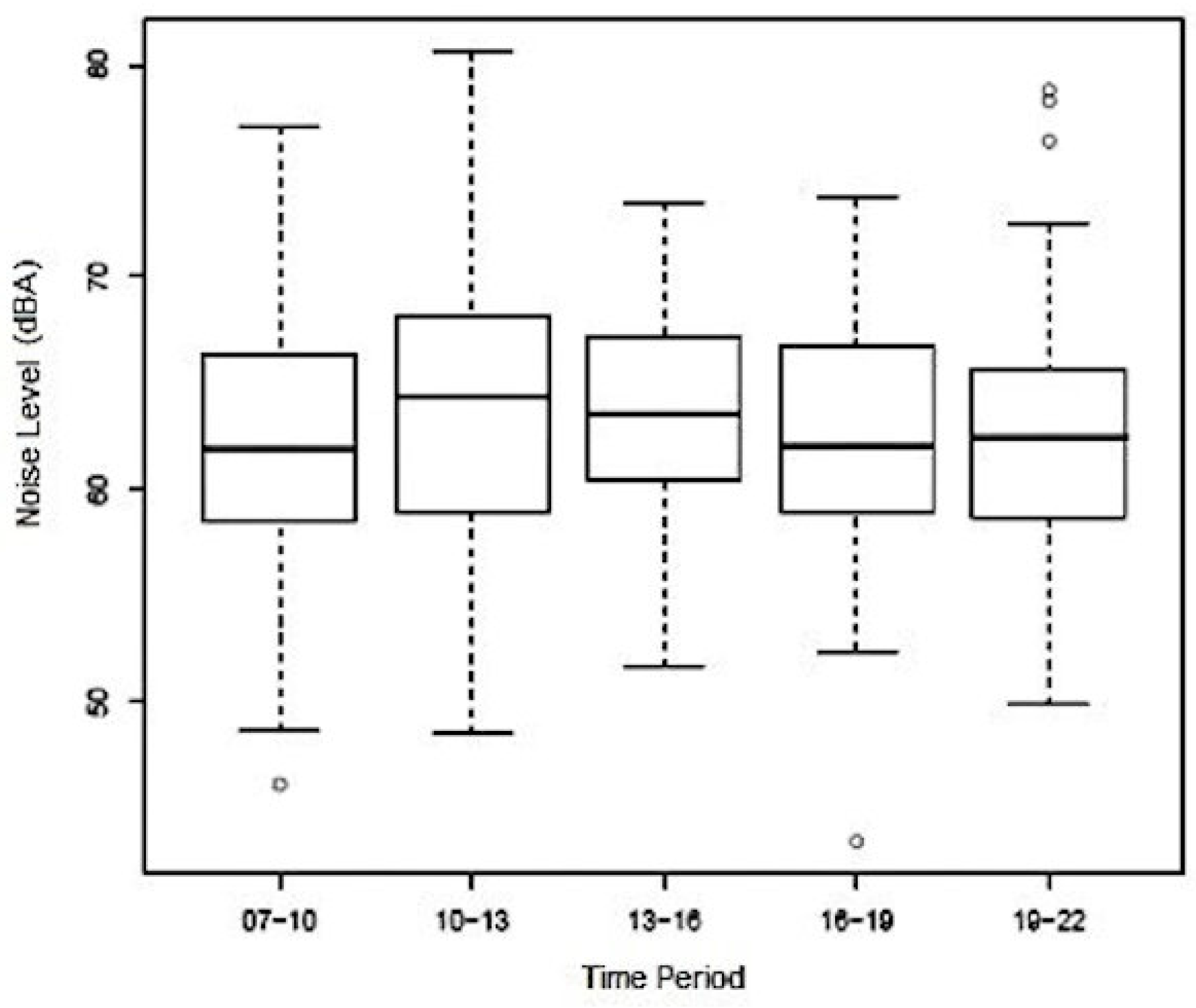
2.4. Descriptive analysis of the data
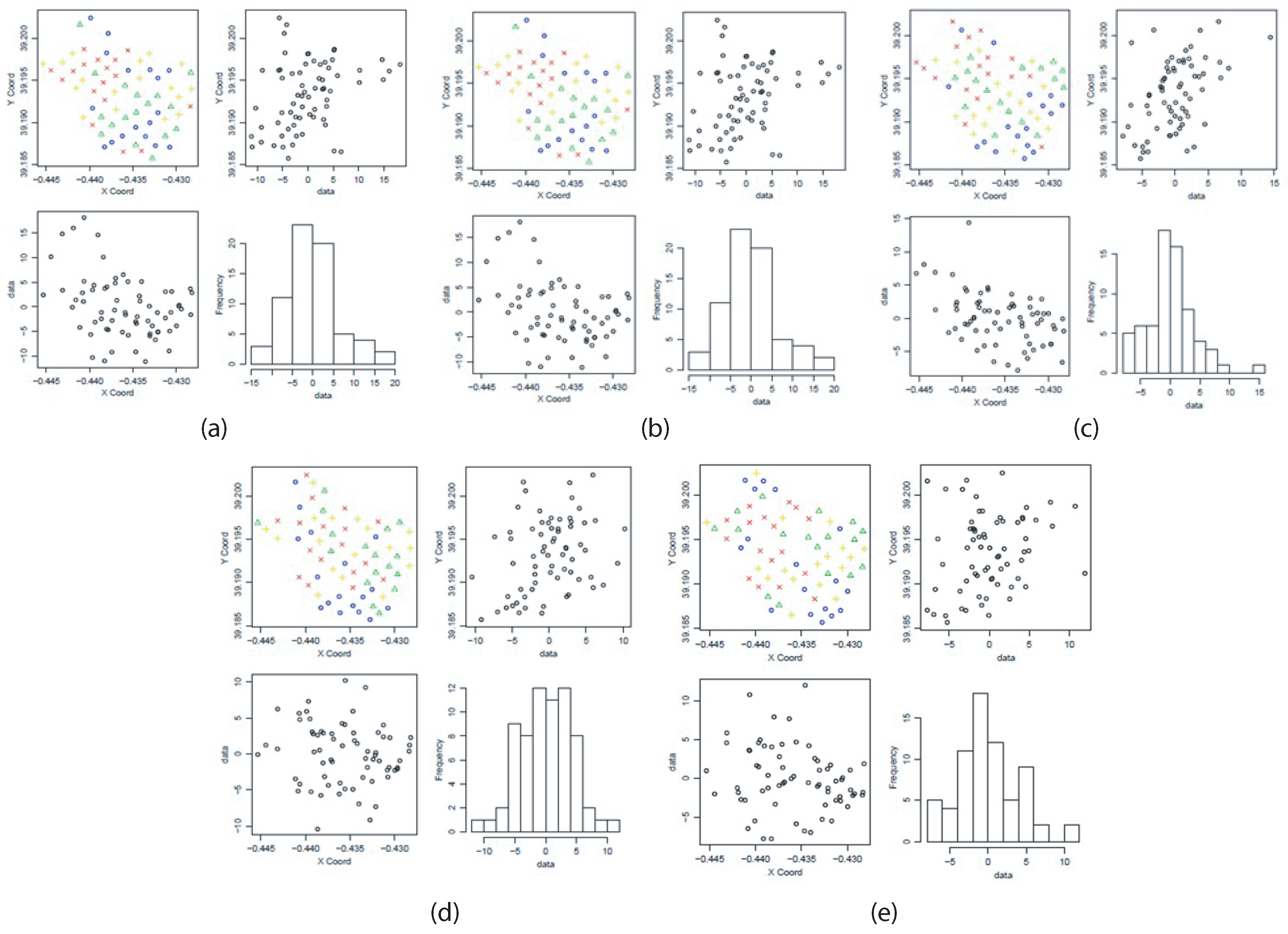
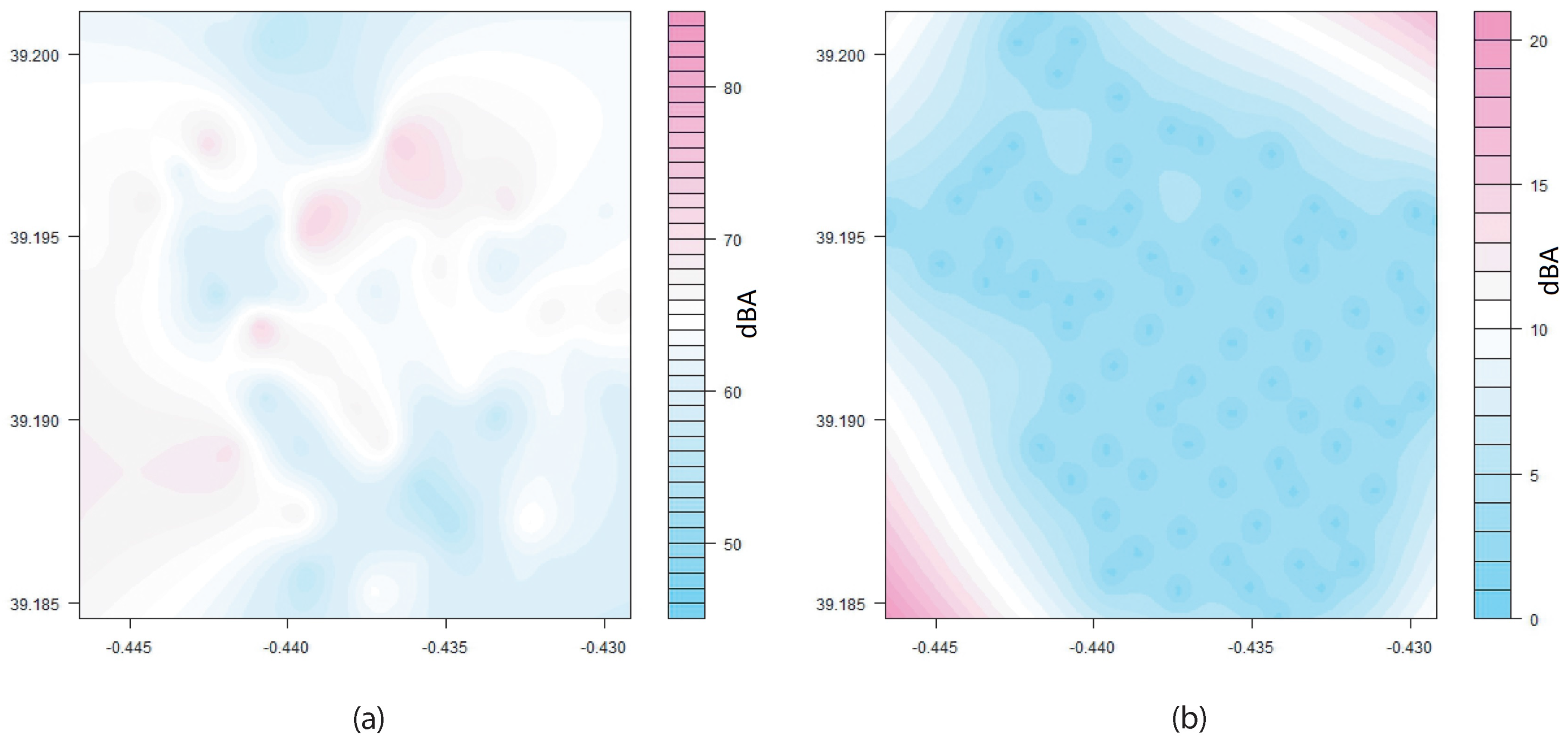
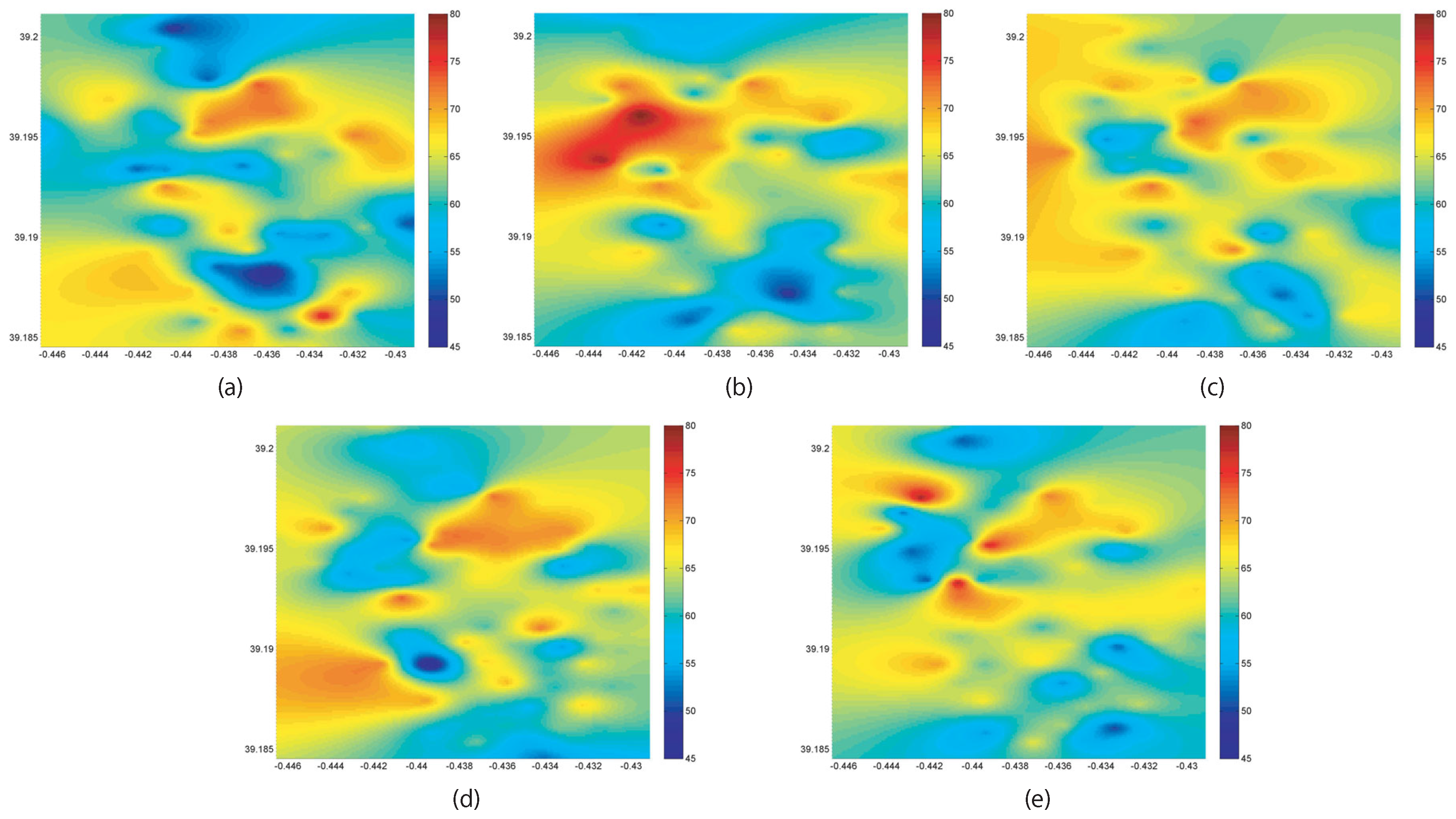
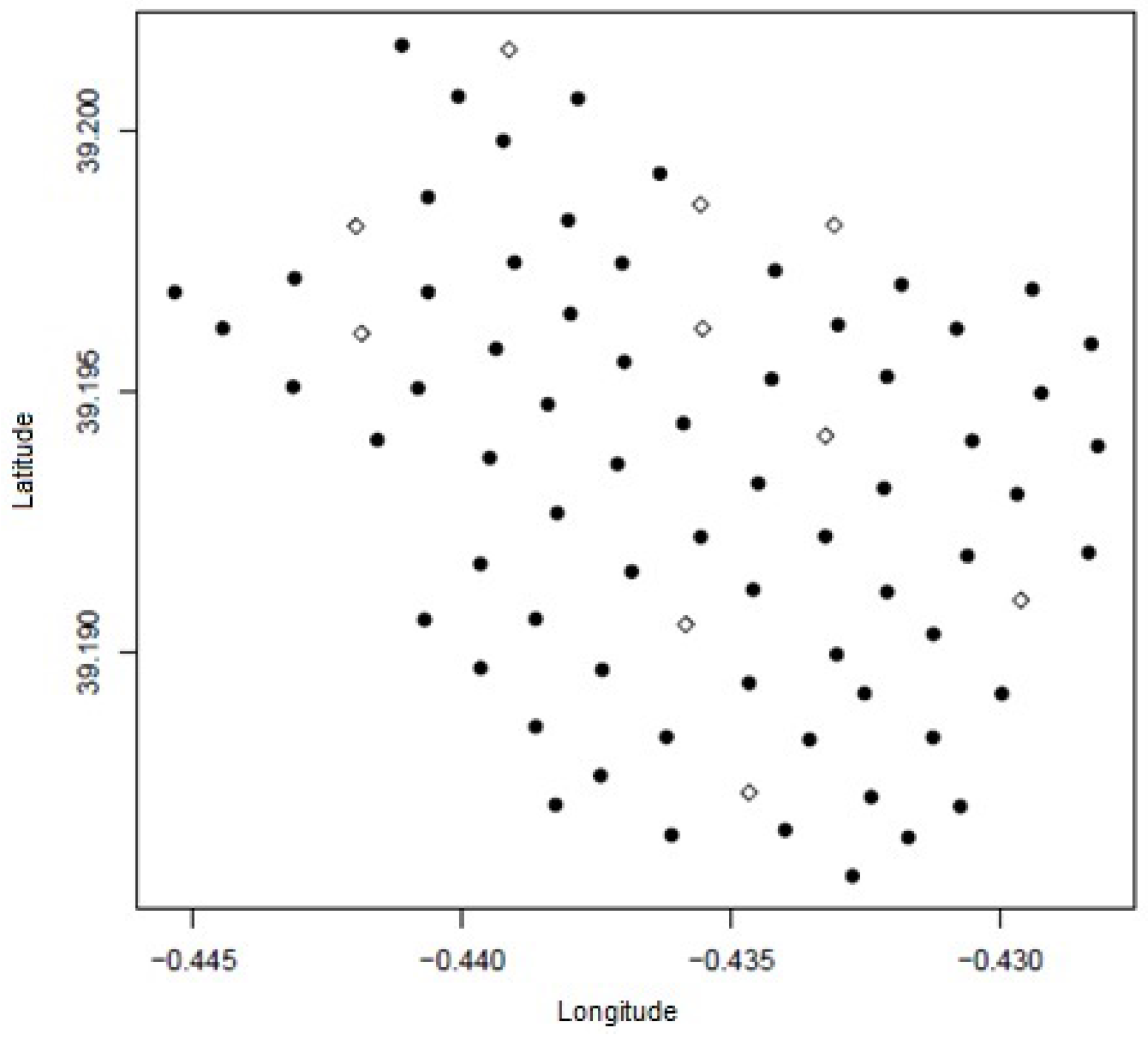
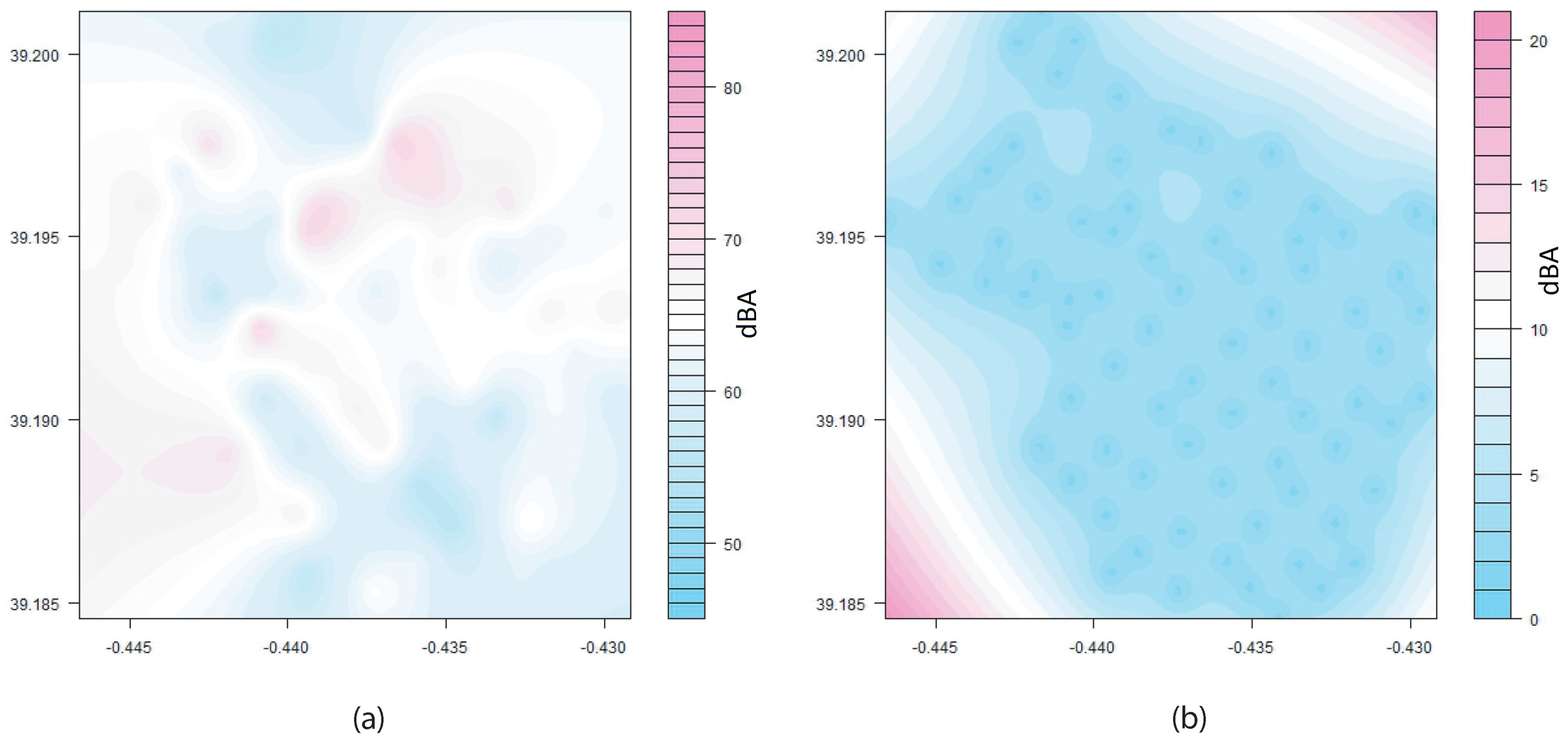
2.5. Spatial Analysis
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ANOVA | Analysis of Variance |
| CRV | Cross-Validation |
| GIS | Geographic Information System |
| GNU/Linux | GNU’s Not Unix, Linux |
| GPU | Graphic Processing Unit |
| IoT | Internet of Things |
| MSE | Mean Squared Error |
| OK | Ordinary Kriging |
| REML | Restricted Maximum Likelihood method |
| RPi | Raspberry Pi |
| RRF | Regularized Random Forest |
| SoC | System on a Chip |
| TmI | Tmote Invent |
| WASN | Wireless Acoustic Sensor Networks |
| WSN | Wireless Sensor Networks |
References
- Santini, S.; Ostermaier, B.; Adelmann, R. On the Use of Sensor Nodes and Mobile Phones for the Assessment of Noise Pollution Levels in Urban Environments. In Proceedings of the 6th International Conference on Networked Sensing Systems (INSS 2009), Pittsburg, CA, USA, 17–19 June 2009.
- Renterghem, T.V.; Thomas, P.; Dominguez, F.; Dauwe, S.; Touhafi, A.; Dhoedt, B.; Botteldoren, D. On the ability of consumer electronics microphones for environmental noise monitoring. J. Environ. Monit. 2011, 13, 544–552. [Google Scholar] [CrossRef] [PubMed]
- Directive of the European Parliament. Directive 2002/49/EC of the European Parliament and of the Council of 25 June 2002 relating to the assessment and management of environmental noise. Off. J. Eur. Communities 2002, L189, 12–25. [Google Scholar]
- Santini, S.; Vitaletti, A. Wireless sensor networks for environmental noise monitoring. In Proceedings of the 6th GI/ITG KuVS Workshop Wireless Sensor Networks, Aachen, Germany, 16–17 July 2007; pp. 98–101.
- Santini, S.; Ostermaier, B.; Vitaletti, A. First experiences using wireless sensor networks for noise pollution monitoring. In Proceedings of the 3rd ACM Workshop Real-World Wireless Sensor Network (REALWSN), Glasgow, Scotland, UK, 1–4 April 2008; pp. 61–65.
- Polastre, J.; Szewczyk, R.; Culler, D. Telos: Enabling ultra-low power wireless research. In Proceedings of the 4th International Symposium on Information Processing in Sensor Networks (IPSN), Los Angeles, CA, USA, 24–27 April 2005; pp. 364–369.
- Hakala, I.; Kivelä, I.; Ihalainen, J.; Luomala, J.; Gao, C. Design of low-cost noise measurement sensor network: Sensor function design. In Proceedings of the IEEE 1st International Conference on Sensor Device Technologies and Applications, Venice, Italy, 18–25 July 2010; pp. 172–179.
- Kivelä, I.; Gao, C.; Luomala, J.; Hakala, I. Design of noise measurement sensor network: Networking and communication part. In Proceedings of the 5th International Conference on Sensor Technologies and Applications, Côte d’Azur, France, 21–27 August 2011; pp. 280–287.
- Maisonneuve, N.; Stevens, M.; Niessen, M.E.; Hanappe, P.; Steels, L. Citizen noise pollution monitoring. In Proceedings of the 10th Annual International Conference on Digital Government Research: Social Networks: Making Connections between Citizens, Data and Government, Digital Government Society of North America, Puebla, Mexico, 17–21 May 2009; pp. 96–103.
- Maisonneuve, N.; Stevens, M.; Niessen, M.E.; Steels, L. Noise-Tube: Measuring and mapping noise pollution with mobile phones. In Information Technologies in Environmental Engineering (Environmental Science and Engineering); Athanasiadis, I., Rizzoli, A.E., Mitkas, P.A., Gómez, J.M., Eds.; Springer: Verlag/Berlin, Germany, 2009; pp. 215–228. [Google Scholar]
- Di-Francesco, M.; Das, S.K.; Anastasi, G. Data collection in wireless sensor networks with mobile elements: A survey. ACM Trans. Sens. Netw. 2011, 8. [Google Scholar] [CrossRef]
- Cressie, N. Statistics for Spatial Data; John Wiley: New York, NY, USA, 1993. [Google Scholar]
- Baume, O.; Gauvreau, B.; Bérengier, M.; Junker, F.; Wackernagel, H.; Chilès, J. Geostatistical modeling of sound propagation: Principles and a field application experiment. J. Acoust. Soc. Am. 2009, 126, 2894–2904. [Google Scholar] [CrossRef] [PubMed]
- Harman, B.; Koseoglu, H.; Yigit, C.O. Performance evaluation of IDW, Kriging and multiquadric interpolation methods in producing noise mapping: A case study at the city of Isparta, Turkey. Appl. Acoust. 2016, 112, 147–157. [Google Scholar] [CrossRef]
- Broadcom Corp., Ltd. (UK). BCM2835 ARM Peripherals. Available online: https://www.raspberrypi.org/wp-content/uploads/2012/02/BCM2835-ARM-Peripherals.pdf (accessed on 11 November 2016).
- ARM Ltd. (UK). ARM1176JZF-S: Technical Reference Manual. Available online: http://infocenter.arm.com/help/topic/com.arm.doc.ddi0301h/DDI0301H_arm1176jzfs_r0p7_trm.pdf (accessed on 11 November 2016).
- Logilink, 2direct GmbH (Germany). Logilink USB to Audio Adapter Mod. UA0053 specifications. Available online: http://www.logilink.eu/media/datasheets/UA0053.pdf (accessed on 11 November 2016).
- CUI Inc. Electret condenser microphone Mod. CMA-4544PF-W. Available online: http://www.cui.com/product/resource/cma-4544pf-w.pdf (accessed on 11 November 2016).
- TP-LINK Technologies Co., Ltd. TP-Link TL-WN725N specifications. Available online: http://www.tp-link.com/en/products/details/TL-WN725N.html (accessed on 11 November 2016).
- Kodak Co. (Rochester, NY, USA). Kodak KD LR20 battery specifications. Available online: http://www.kodak.com/eknec/documents/fe/0900688a8019d7fe/KD.pdf (accessed on 11 November 2016).
- Upton, E.; Halfacree, G. Raspberry Pi User Guide, 3rd ed.; John Wiley and Sons Ltd.: Chichester, UK, 2014. [Google Scholar]
- Chroboczek, J. The Babel Routing Protocol, RFC 6126, Quagga Routing Software Suite, GPL Licensed, 2011. Available online: http://www.quagga.net (accessed on 3 October 2016).
- Patawari, A. Getting Started with OwnCloud; Packt Publishing Ltd.: Birmingham, UK, 2013. [Google Scholar]
- Brocolini, L.; Lavandier, C.; Quoy, M.; Ribeiro, C. Measurements of acoustic environments for urban soundscapes: Choice of homogeneous periods, optimization of durations, and selection of indicators. J. Acoust. Soc. Am. 2013, 134, 813–821. [Google Scholar] [CrossRef] [PubMed]
- Geraghty, D.; O’Mahony, M. Investigating the temporal variability of noise in an urban environment. Int. J. Sustain. Built Environ. 2016, 5, 34–45. [Google Scholar] [CrossRef]
- Ooms, J. The OpenCPU system: Towards a universal interface for scientific computing through separation of concerns. arXiv, 2014; arXiv:1406.4806. [Google Scholar]
- CESVA SL (Spain). SC310 - Sound Level Meter and Spectral Analyser. Available online: https://download.cesva.com/datasheets/sc310_eng.pdf (accessed on 3 November 2016).
- Garcia, A. Environmental Urban Noise; WIT Press: Southampton, UK, 2001. [Google Scholar]
- RPi Camera. Raspberry Pi Camera v2 specifications. Available online: http://www.farnell.com/datasheets/2056179.pdf?_ga=1.152577328.880870297.1479740269 (accessed on 11 November 2016).
- Diblasi, A.; Bowman, A.W. On the use of the variogram in checking for independence in spatial data. Biometrics 2001, 57, 211–218. [Google Scholar] [CrossRef] [PubMed]
- R webpage. Available online: http://www.r-project.org/ (accessed on 3 August 2016).
- Quinones-Bolanos, E.E.; Bustillo-Lecompte, C.F.; Mehrvar, M. A traffic noise model for road intersections in the city of Cartagena de Indias, Colombia. Transp. Res. Part D Transp. Environ. 2016, 47, 149–161. [Google Scholar] [CrossRef]
- Halim, H.; Abdullah, R. Equivalent noise level response to number of vehicles: A comparison between a high traffic flow and low traffic flow highway in Klang Valley, Malaysia. Front. Environ. Sci. 2014, 2. [Google Scholar] [CrossRef]
- Segura, J.; Navarro, E. Estudio de la Contaminación Acústica en el Municipio de Algemesí “Study of the Acoustic Pollution in the Municipality of Algemesí”; Universitat de València: Burjassot, Spain, February 2011. [Google Scholar]
- García-Rodríguez, A. Estudio del Ruido Ambiental en la Comunidad Valenciana “Study of the Environmental Noise in the Valencian Community”; Generalitat Valenciana: València, Spain, 1994. [Google Scholar]
- Huang, H.C.; Cressie, N. Spatio-temporal prediction of snow water equivalent using the Kalman filter. Comput. Stat. Data Anal. 1996, 22, 159–175. [Google Scholar] [CrossRef]
- Ribeiro, P.J.; Diggle, P.J. geoR: A package for geostatistical analysis. R-News 2001, 1, 15–18. [Google Scholar]
- Ryu, H.; Park, I.K.; Chun, B.S.; Chang, S.I. Spatial statistical analysis of the effects of urban form indicators on road-traffic noise exposure of a city in South Korea. Appl. Acoust. 2017, 115, 93–100. [Google Scholar] [CrossRef]
- Murphy, E.; King, E. Environmental Noise Pollution: Noise Mapping, Public Health, and Policy; Elsevier Inc.: San Diego, CA, USA, 2014. [Google Scholar]
- ISO 12913-1:2014 Acoustics—Soundscape—Part 1: Definition and Conceptual Framework. Available online: http://www.iso.org/iso/catalogue_detail.htm?csnumber=52161 (accessed on 25 October 2016).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description | Values |
|---|---|---|
| Zone | Zone Type | Industrial, Urban, Services |
| Day | Week day | M, T, W, Th, F |
| Hour | Hour of measure | - |
| Time period | Time period of measure | |
| Long. | Geographical longitude | - |
| Lat. | Geographical latitude | - |
| Equivalent noise level | - | |
| Nr. l. veh | Number of light vehicles | - |
| Nr. h. veh | Number of heavy vehicles | - |
| Nr. moto | Number of motorcycles | - |
| Total amount of vehicles | - | |
| Logarithm of number of vehicles | - | |
| Avg. speed | Average speed of vehicles | - |
| W street | Width of the street | - |
| Height.b | Height of the building at the back | - |
| Height.f | Height of the building in the front | - |
| Slope | Slope of the road | - |
| Pavement | Type of Pavement | Asphalt, Concrete, Paving Stone, Soil |
| vParked | Number of vehicles parked | - |
| D2Junct | Distance to next junction | - |
| Circulat. | Number of circulation directions | 1, 2 |
| Nr. lanes | Number of useful lanes | - |
| Voices | Presence of people speaking | Y, N |
| Animals | Presence of animal sounds | Y, N |
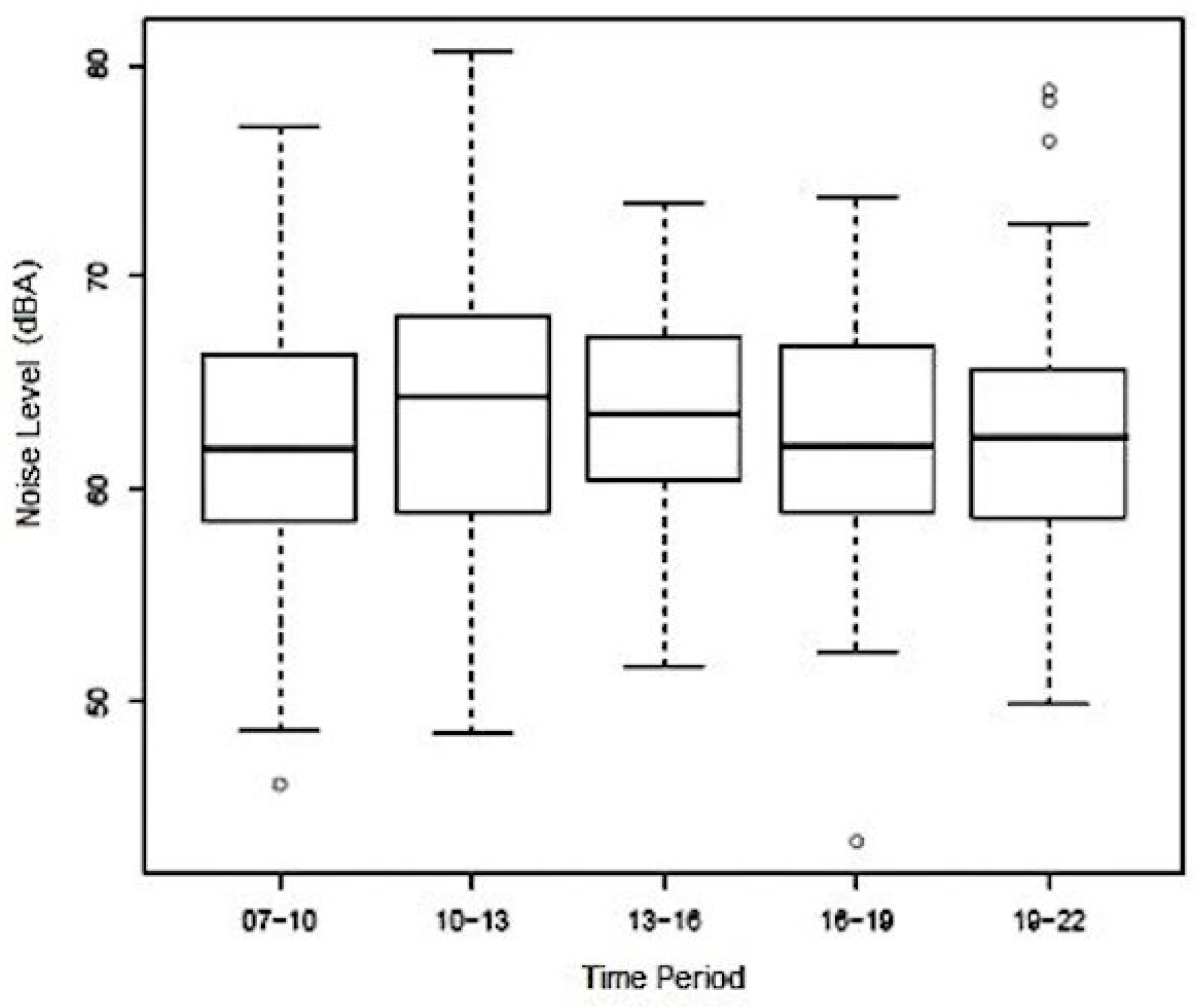
| Time Period | |||||
|---|---|---|---|---|---|
| 7 h–10 h | 10 h–13 h | 13 h–16 h | 16 h–19 h | 19 h–22 h | |
| Mean | 62.117 | 63.714 | 63.503 | 62.596 | 62.435 |
| Std. Dev. | 0.719 | 0.723 | 0.580 | 0.649 | 0.683 |
| Median | 61.900 | 64.350 | 63.550 | 62.001 | 62.450 |
| Variance | 40.265 | 40.738 | 26.241 | 32.878 | 36.391 |
| Minimum | 46.1 | 48.5 | 51.6 | 43.4 | 49.9 |
| Maximum | 77.1 | 80.6 | 73.5 | 73.7 | 78.8 |
| Df | Sum. Sq. | Mean Sq. | F-Value | P-Value | |
|---|---|---|---|---|---|
| Time Period | 4 | 151.7 | 37.9 | 1.0742 | 0.3689 |
| Std. Dev | 385 | 13,591.5 | 35.3 | 1.0052 | 0.2567 |
| Period 1 | Period 2 | Period 3 | Period 4 | Period 5 | ||
|---|---|---|---|---|---|---|
| Tendency | 53.029 | 60.132 | 54.791 | 53.687 | 52.329 | |
| -Std. Error | 12.86 | 11.15 | 6.50 | 5.60 | 10.86 | |
| 5.071 | 2.021 | 4.736 | 5.029 | 4.986 | ||
| -Std. Error | 0.42 | 0.60 | 0.66 | 0.54 | 0.55 | |
| Independency Test | Long | 0.779 | 0.144 | 0.003 | 0.258 | 0.430 |
| Lat | 0.019 | 0.223 | 0.000 | 0.025 | 0.074 | |
| Long*Lat | 0.256 | 0.025 | 0.000 | 0.410 | 0.375 | |
| Variogram | Nugget | 9.359 | 11.357 | 12.670 | 4.069 | 15.676 |
| Sill | 37.436 | 45.429 | 38.084 | 35.009 | 33.358 | |
| Range (degree) | 0.007 | 0.004 | 0.005 | 0.002 | 0.005 | |
| Prediction | MSE (Mean Squared Error).lm | 3.902 | 4.602 | 3.132 | 3.236 | 7.127 |
| MSE.glm | 3.990 | 3.907 | 3.696 | 3.546 | 6.401 | |
| Cross-Validation (CRV) | CRV1.glm | 0.003 | 0.004 | 0.005 | ||
| CRV2.glm | 1.068 | 1.010 | 0.816 | 0.941 | 0.800 | |
| CRV3.glm | 4.664 | 5.348 | 3.755 | 4.589 | 4.218 |
| % | mtry | coefReg | coefImp | RMSE | Rsquared |
|---|---|---|---|---|---|
| 10%/90% | 19 | 0.505 | 0.0 | 3.5215 | 0.6890 |
| 20%/80% | 37 | 0.505 | 0.5 | 3.5327 | 0.6862 |
| 30%/70% | 37 | 0.010 | 0.0 | 3.5225 | 0.6880 |
| 40%/60% | 37 | 0.010 | 1.0 | 3.5338 | 0.6859 |
| 50%/50% | 19 | 1.000 | 0.0 | 3.5405 | 0.6855 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Segura Garcia, J.; Pérez Solano, J.J.; Cobos Serrano, M.; Navarro Camba, E.A.; Felici Castell, S.; Soriano Asensi, A.; Montes Suay, F. Spatial Statistical Analysis of Urban Noise Data from a WASN Gathered by an IoT System: Application to a Small City. Appl. Sci. 2016, 6, 380. https://doi.org/10.3390/app6120380
Segura Garcia J, Pérez Solano JJ, Cobos Serrano M, Navarro Camba EA, Felici Castell S, Soriano Asensi A, Montes Suay F. Spatial Statistical Analysis of Urban Noise Data from a WASN Gathered by an IoT System: Application to a Small City. Applied Sciences. 2016; 6(12):380. https://doi.org/10.3390/app6120380
Chicago/Turabian StyleSegura Garcia, Jaume, Juan Jose Pérez Solano, Máximo Cobos Serrano, Enrique A. Navarro Camba, Santiago Felici Castell, Antonio Soriano Asensi, and Francisco Montes Suay. 2016. "Spatial Statistical Analysis of Urban Noise Data from a WASN Gathered by an IoT System: Application to a Small City" Applied Sciences 6, no. 12: 380. https://doi.org/10.3390/app6120380
APA StyleSegura Garcia, J., Pérez Solano, J. J., Cobos Serrano, M., Navarro Camba, E. A., Felici Castell, S., Soriano Asensi, A., & Montes Suay, F. (2016). Spatial Statistical Analysis of Urban Noise Data from a WASN Gathered by an IoT System: Application to a Small City. Applied Sciences, 6(12), 380. https://doi.org/10.3390/app6120380