1. Introduction
Vehicle detection applications have been playing crucial roles in traffic management of an intelligent transport system (ITS). For those transportation operations, the inductive-loop detector and non-intrusive wired sensors are widely used [
1] despite the emergence of wireless traffic sensors in [
2,
3]. In practice, non-intrusive traffic detectors are much preferred [
1,
4,
5,
6,
7,
8] owing to apparatus durability, functional diversity, and minimum adverse effect on road conditions when installed and maintained. The detection accuracies of non-intrusive sensors using video imaging, ultrasound, infrared, and microwave radar technologies have been evaluated under various conditions for vehicle classification and monitoring (e.g., [
5,
6,
7,
8]). It is noted that among non-intrusive sensors, the traffic microwave radar detectors (TMRDs) are highly likely to prevail as an integral part of an ITS. This is due to the advantages that the detection accuracy of the TMRD is unaffected by weather, air turbulence, temperature and light conditions, and the TMRD in sideway-looking mode can perform multi-lane traffic detection. Besides, the TMRD using the frequency modulated continuous waveform (FMCW) technique in [
9,
10] can have lower peak-to-average power ratio in transmission, and more advantages such as small size, light weight, and low cost. Technical applications of the FMCW TMRD include vehicle tracking [
11], car classification [
12,
13], automobile detection [
14], vehicle velocity estimation [
12,
14,
15], and vehicle distance estimation [
15], etc.
Unlike the aforementioned works [
11,
12,
13,
14,
15], this paper is focused on traffic flow detection of the FMCW TMRD. In this aspect, the TMRD acquires the round-trip travel time of the FMCW from the TMRD to a vehicle within a lane. The time information can then be converted into an estimated distance between the TMRD and the fast Fourier transform (FFT) main lobe of the vehicle signal. We utilize the FFTs of vehicle signals, and develop several smart schemes for vehicle flow detection. The resulting methods aim to yield highly accurate real-time traffic information of highways, roads and bridges in urban areas. Satisfactory outcomes can help make appropriate policies and strategies (e.g., road construction, deployment and control of traffic lights) for increasing transportation efficiency (e.g., reduction of traffic congestions).
For vehicle flow estimation in a multiple-lane environment, the conventional approach first sets the same threshold for each lane to filter out noise (e.g., motorcycles and bicycles) from the FFTs of received signals. The resulting FFTs of vehicle signals and those of clutter (e.g., buildings) are distinguishable. This is because the latter are comparably large and constantly appear at fixed positions outside of road lanes. Next, the number of the resulting vehicle FFTs within a lane is assigned as the number of vehicles within the lane. However, the conventional method usually yields highly inaccurate traffic statistics caused by three undesirable situations. One is that the actual traffic within a lane can be wrongly estimated because of the inclusion of lane-crossing FFT side lobes from adjacent lanes. Another is that a vehicle may be counted twice for its previous and current lane if the vehicle makes and completes a lane change when it passes the detection zone. The other is that the reflected signal of a vehicle moving within a lane is missing due to the obstruction of a large bus moving within adjacent lanes. Accordingly, it is apparent that the first unfavorable situation is improvable while the second and the third situations seem too difficult to be rectified.
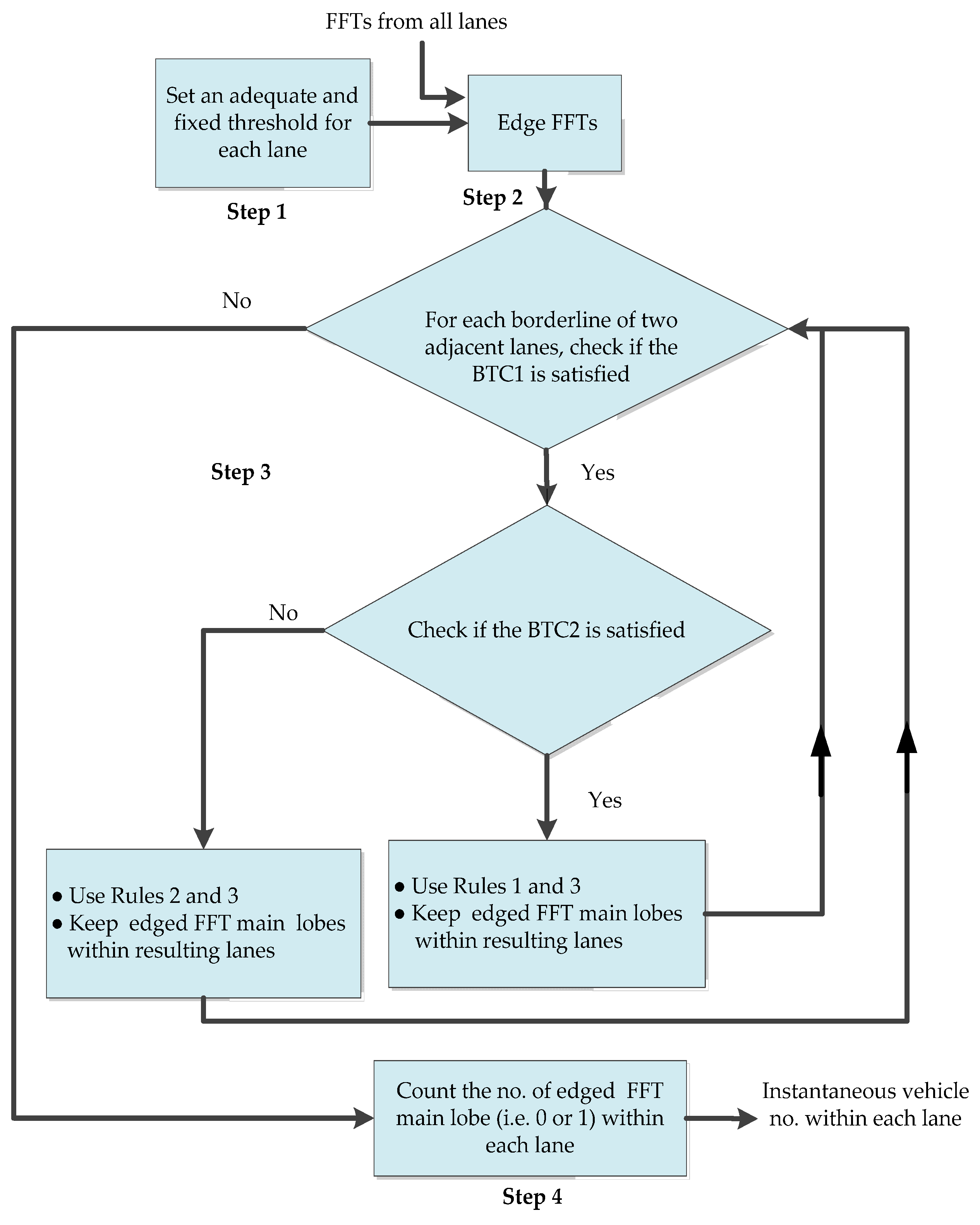
In this paper, the development of our smart schemes emphasizes how to ameliorate adverse effects of lane-crossing FFT side lobes from adjacent lanes. We first adjust and select an adequate threshold for each lane not only to remove noise but also to sensibly reduce edged FFT side lobes within each lane. Next, we utilize FFT and lane-/or time stamp-related information for proposing test criteria for identifying possible occurrences of lane-crossing edged FFT side lobes. Furthermore, we can give various plausible decisions for correctly identifying the lane on which a vehicle is moving. Those smart decisions, meanwhile, can disregard the effect of lane-crossing edged FFT side lobes. Compared with the conventional method, the proposed methods can reliably increase the detection accuracy of both the lane traffic flow and the directional vehicle volume.
The outline of this paper is given as follows.
Section 2 introduces the TMRD system for vehicle detection and the FMCW principle. In
Section 3, we describe the traffic detection problems of the conventional method.
Section 4 presents the proposed information-aided smart schemes for detection performance enhancements, and gives performance analysis. On-site experimental setups are described in
Section 5. In addition, experimental evaluations of the conventional approach and the proposed methods are provided. Conclusions are then given in
Section 6.
2. FMCW TMRD System
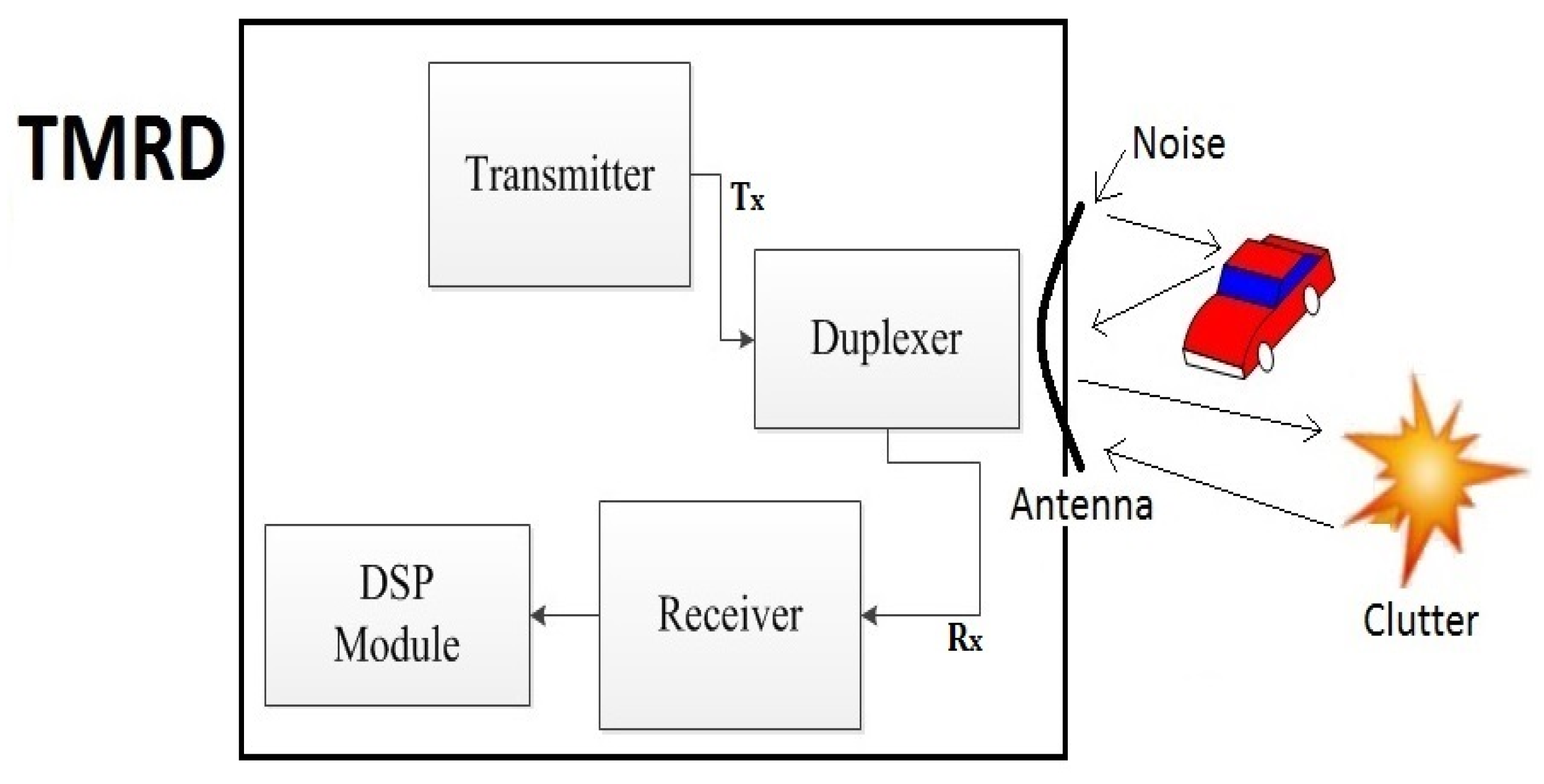
The FMCW TMRD consists of several main parts: antenna, transmitter, receiver and digital signal processing (DSP) module. Its functional block diagram is depicted in
Figure 1 in which Tx and Rx denote radar transmission signal and received vehicle return, respectively. The transmitter transmits FMCWs to vehicles on multiple road lanes, and the receiver receives reflected signals. The DSP module converts a received target signal into a FFT, and estimates the range/or velocity information of the target. The range from the TMRD to the target (i.e., the position of the FFT main lobe of the returned target signal) can be estimated by using the frequency analysis for the reflected target signal. This in turn estimates the lane on which the vehicle is located since the range between each lane and the TMRD is fixed and known. In addition, we can program and deploy our algorithms to the DSP module for vehicle flow detection.
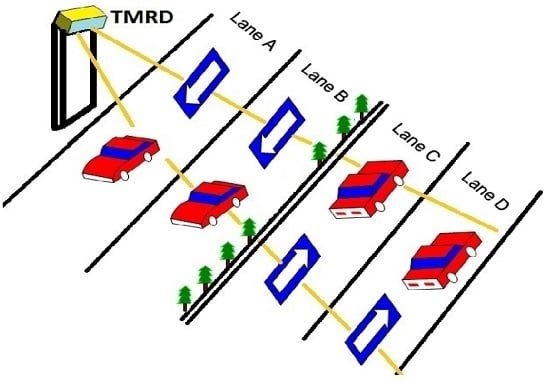
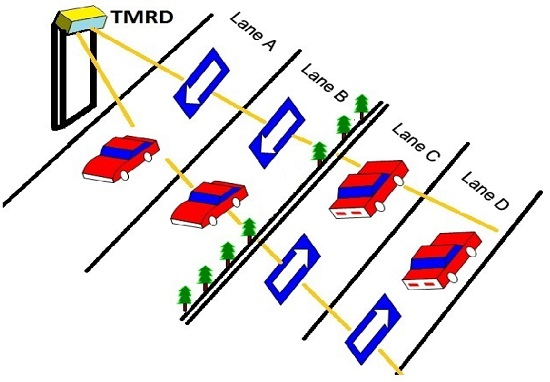
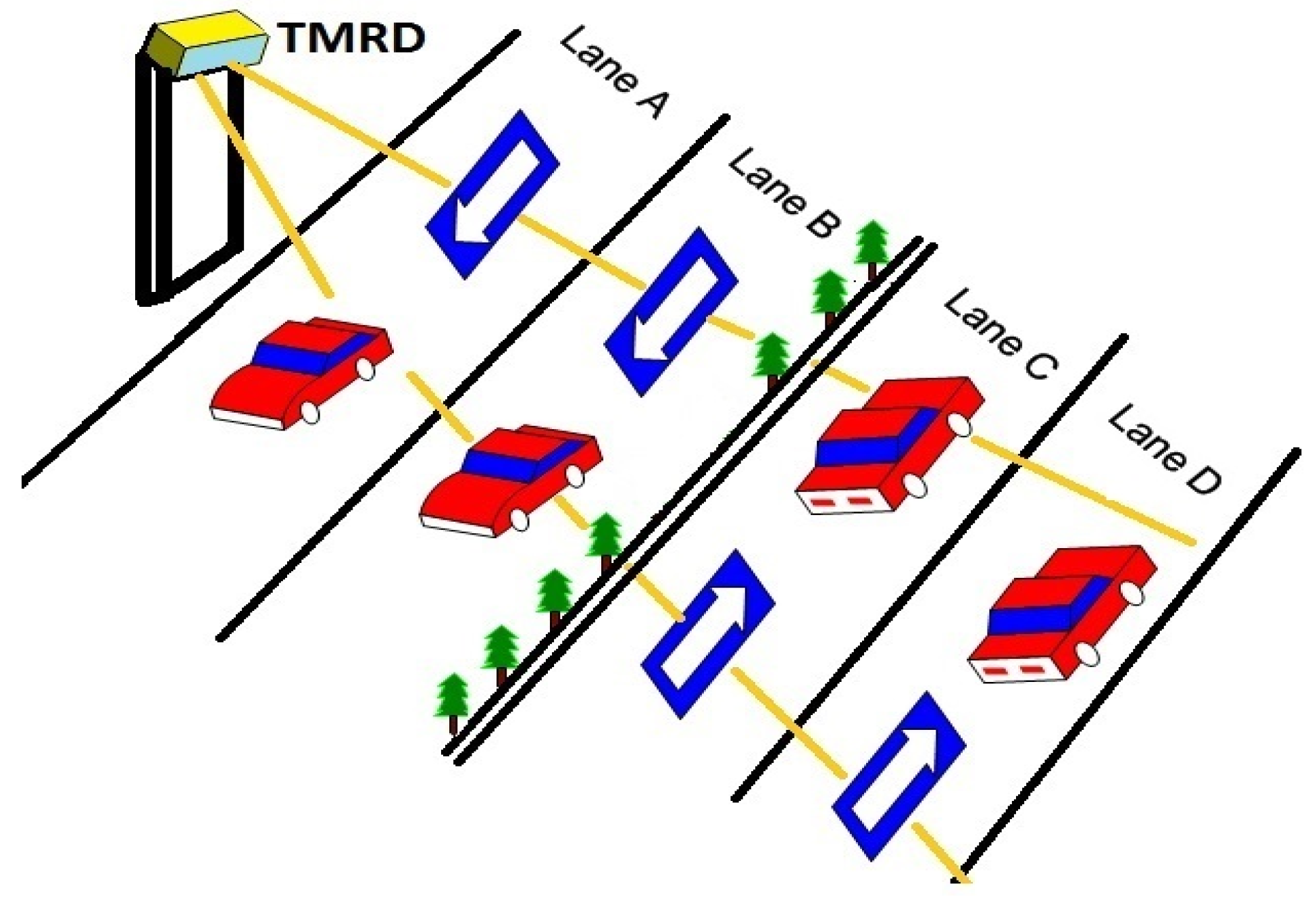
The FMCW TMRD is small in size and light in weight so that it can be conveniently mounted on a fixture. Unlike the forward-looking automotive radar sensing in [
16], the sideway-looking vehicle detection of the TMRD in a multiple-lane environment is shown in
Figure 2.
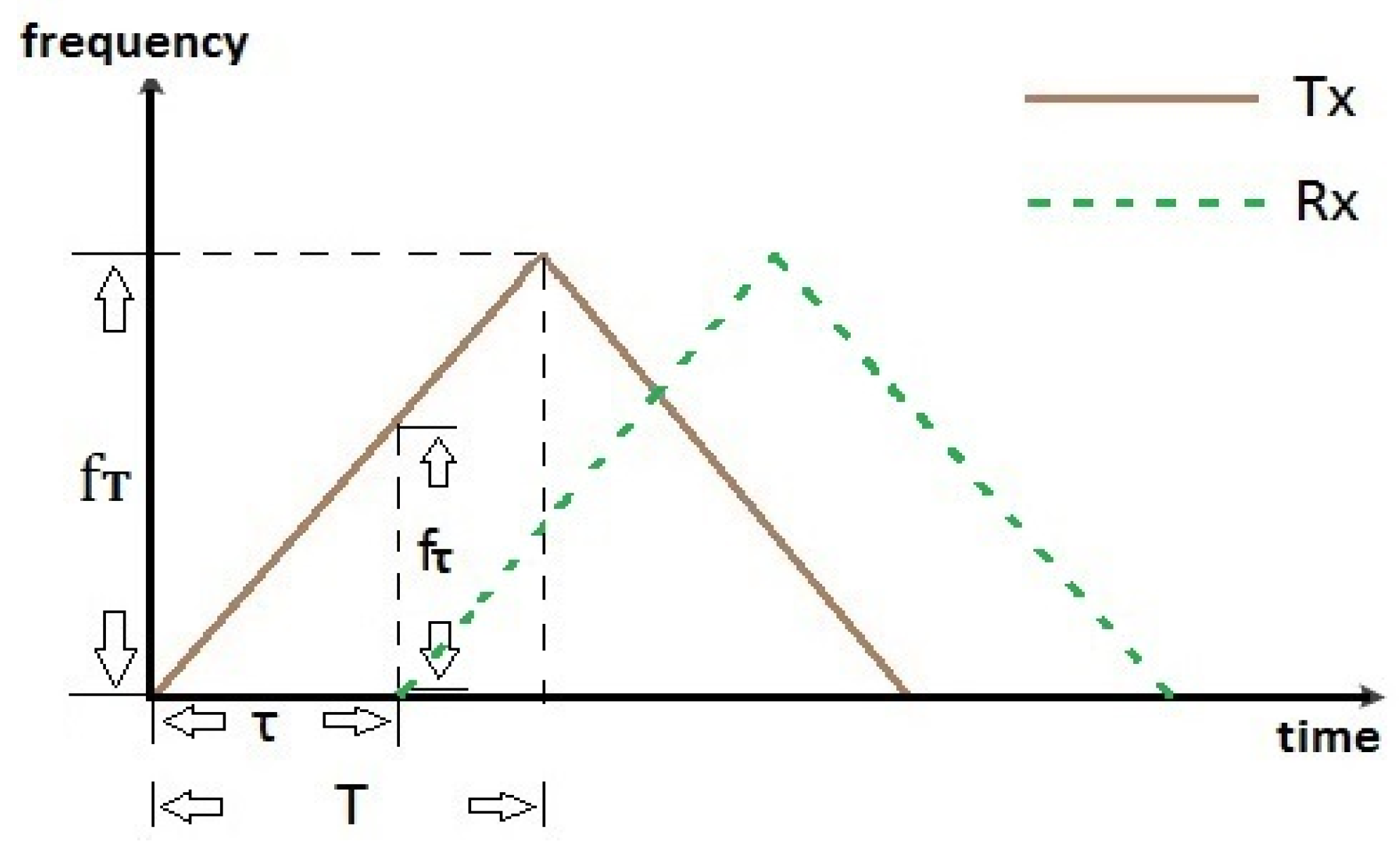
The operation of the FMCW TMRD system follows the linear FMCW radar principle in [
9,
10]. Assume a FMCW radar beam is transmitted and reflected on a vehicle. The receiver receives the return vehicle signal after a delay time
. Then the distance
between the vehicle and the TMRD is obtained as
where
denotes the speed of the light. The frequency versus time characteristics for the linear FMCW is shown in
Figure 3. Based on the similarity of two triangles in
Figure 3, we directly obtain
i.e.,
where
is the total frequency difference during the signal period
, and
is the beat frequency for the time delay
. Putting Equation (3) into Equation (1) yields
Equation (4) implies that the distance between the target and the TMRD is proportionally related to the beat frequency, which can be extracted by the DSP module. Hence, as the distance gets larger, so does the beat frequency. Accordingly, the FFTs of returned signals in the frequency-magnitude axis can be depicted in the distance-magnitude axis. Illustrations can be foundin
Section 5.
3. Problem Description
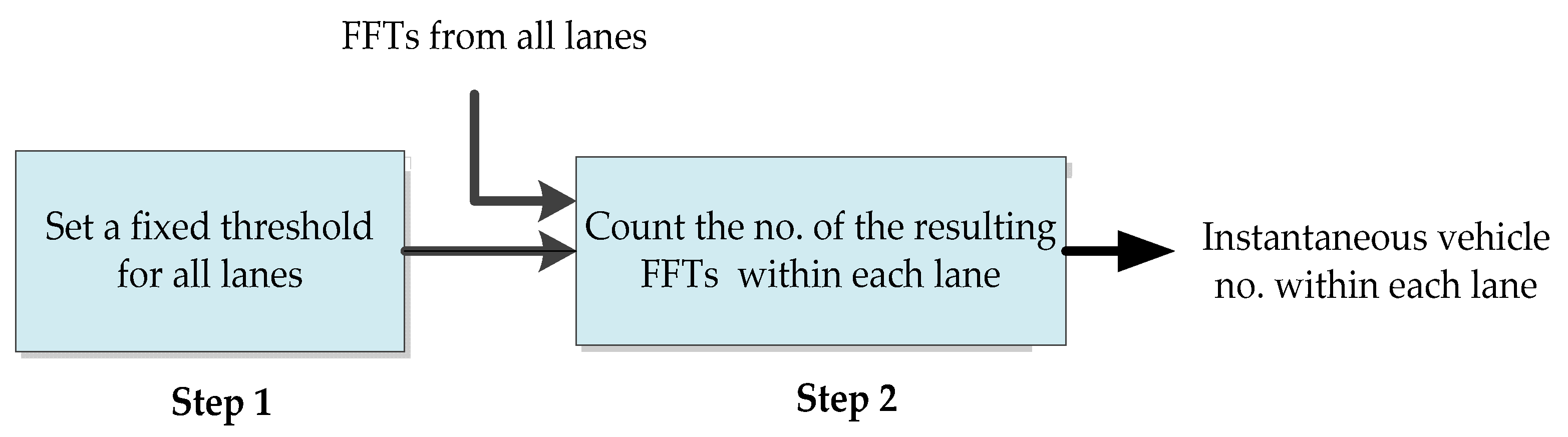
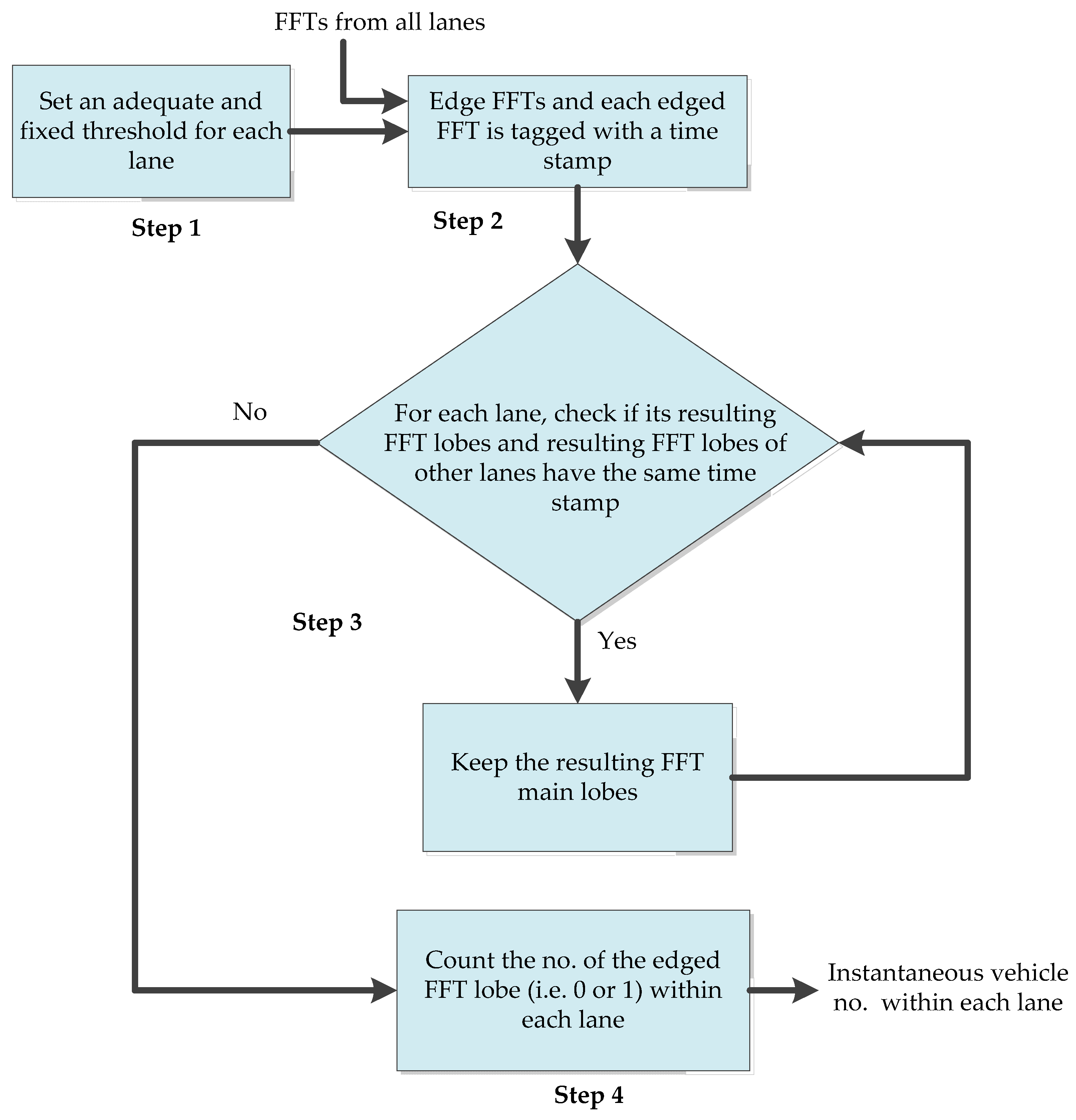
To perform vehicle flow detection for multiple lanes, a simple choice is the conventional method whose functional procedure is shown in
Figure 4. In step 1, based on the average FFT magnitudes of environmental noises observed at the road site, an appropriate and fixed threshold is pre-selected for removing noises (e.g., motorcycles and bicycles) from the FFTs of received return signals from all lanes. Moreover, the threshold has to be far below the FFT main lobe of a vehicle signal within each lane. Because the peaks of the FFTs of clutters (e.g., buildings) are usually large and appear at fixed positions, it is ensured that the FFT main lobes of reflected vehicle signals and those of clutters are distinguishable. Such a threshold selection can reduce the chance of noise being mistaken as side lobes, which in turn may minimize the vehicle counting errors. In step 2, FFTs of vehicle signals from all lanes are edged by the threshold to yield resulting FFTs. The number of the resulting FFT lobes within each lane is taken as the instantaneous vehicle number within each lane.
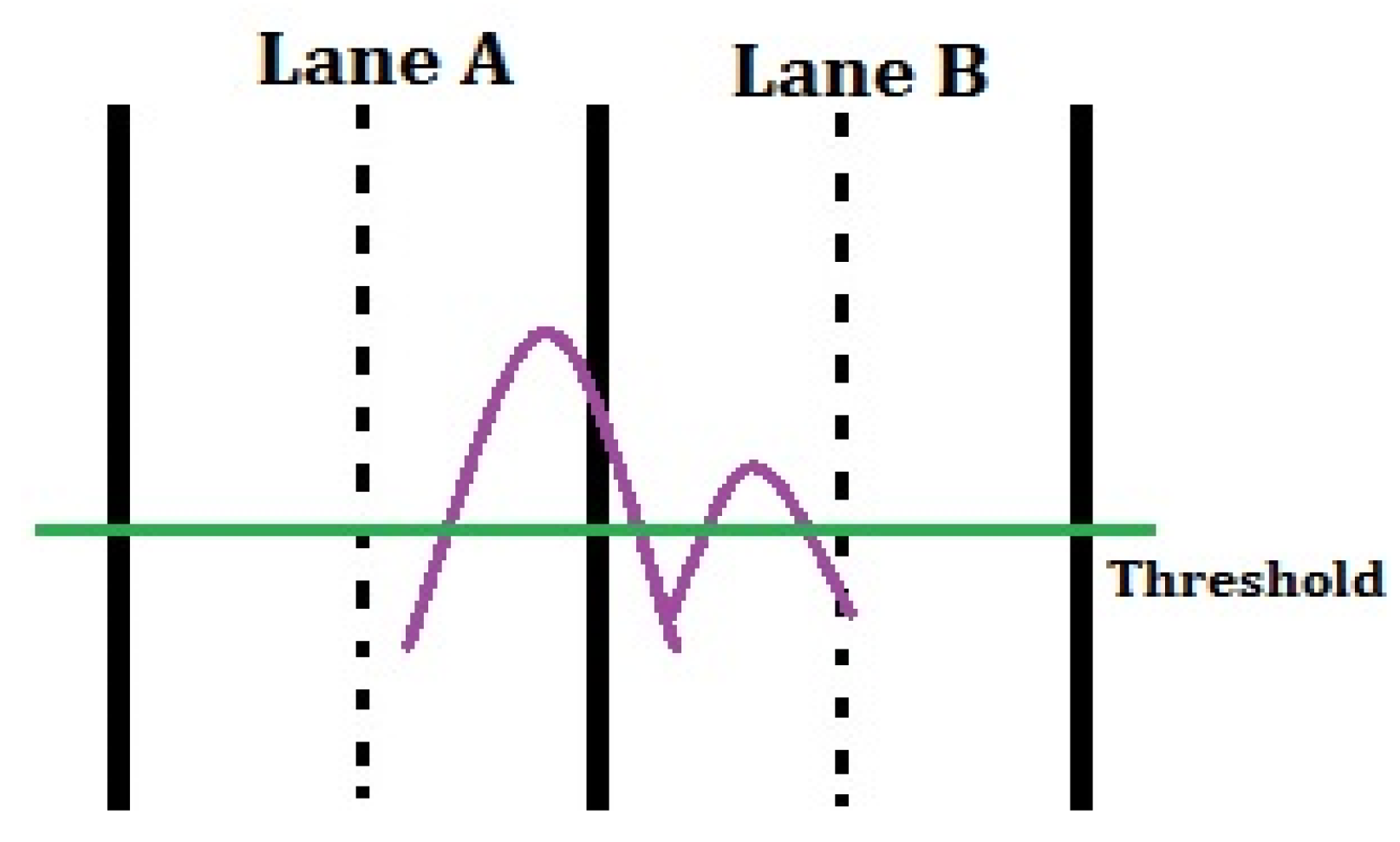
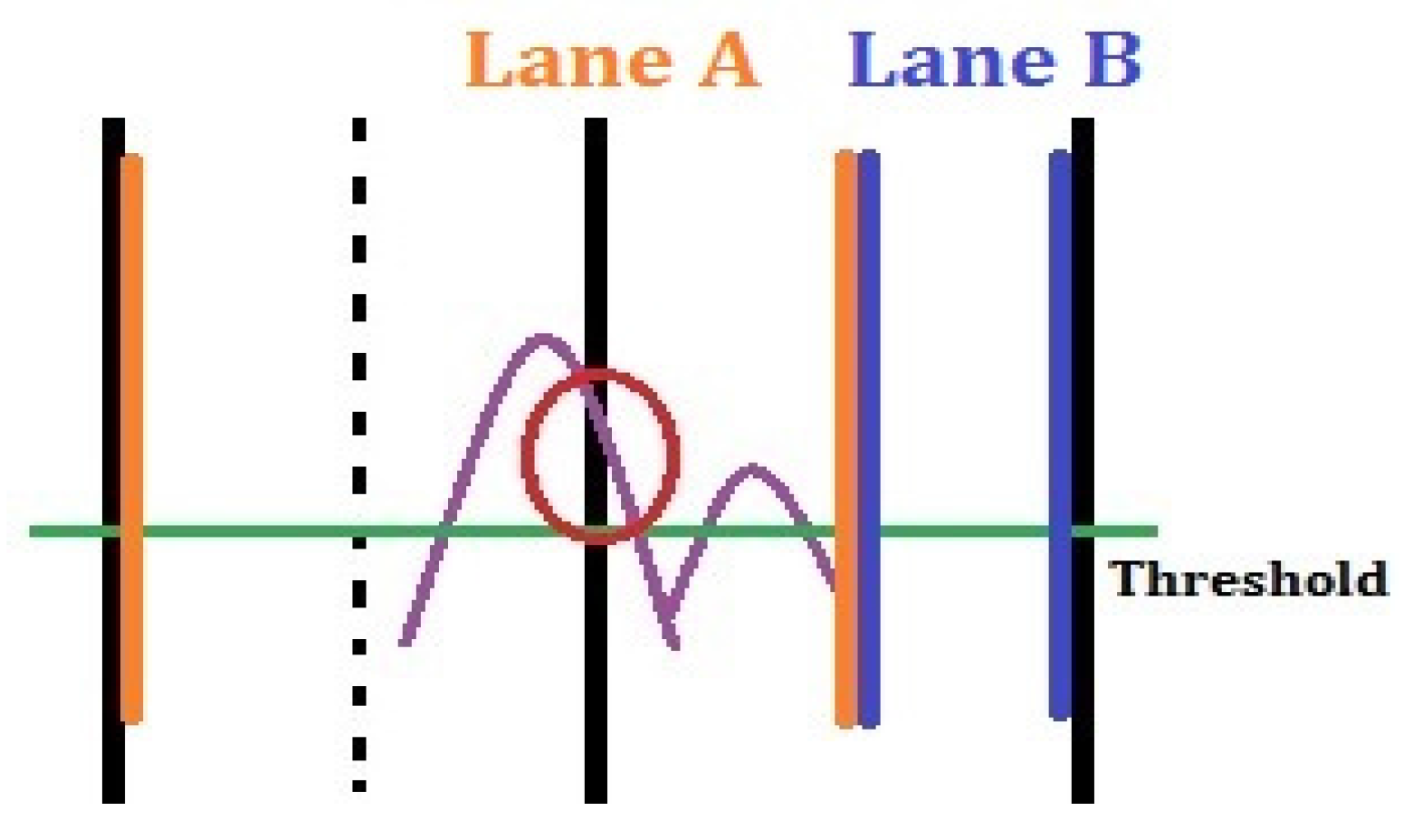
Accordingly, the conventional method utilizes no additional accessible information for refining edged FFTs to yield vehicle flow detection. In this way, the estimated traffic flow within a lane and the estimated directional traffic volume may be quite inaccurate. This mainly results from lane-crossing FFT side lobes from adjacent lanes. An example is shown in
Figure 5 in which the edged FFT main lobe of a vehicle signal lies within Lane A while the edged FFT side lobe of the same vehicle signal lies within Lane B. The conventional scheme incorrectly assigns “1” as the instantaneous vehicle number within Lane B. Therefore, the foregoing unfavorable situation motivates us to develop smart methods for improving the accuracy of vehicle flow detection.
5. Experimental Section
We carry out on-site experimental tests on the performance of the conventional approach and the proposed methods. The experimental results confirm that the proposed methods can achieve significant improvements over the conventional scheme. In addition, the outcomes suggest that the proposed method 2 be the best overall among the schemes tested. The experimental results and the predicted performance analysis in
section 4.2 are consistent.
5.1. Experimental Setup
The experiments are performed at an urban road site shown in
Figure 12. Two southbound lanes A and B and two northbound lanes C and D are at the site. Each lane width is around 3.5 m. Separation blocks lay between lanes B and C. Since there are separation blocks between lanes B and C, only the borderline between lanes A and B, and that between lanes C and D are considered in the proposed algorithms.
The FMCW TMRD (UUEI, Taoyuan, Taiwan) with a 10-GHz frequency band is utilized for the experiments because it is accessible to us, and is commonly and commercially used. However, the TMRD can have only one algorithm equipped for vehicle detection at each time. Therefore, we cannot use one TMRD for the performance comparisons of several algorithms using the same received signal inputs at each time. To tackle the aforementioned situation, two TMRDs are deployed as shown in
Figure 13 for testing the performance of two algorithms at each time block. FMCW transmissions by the two TMRDs are synchronized. Besides, the two TMRDs are close to each other and placed at 4 ~ 5 m in height. It is ensured that the two TMRDs can operate simultaneously without mutual FMCW interferences. No extra space at the site is available for the deployment of a third TMRD so that the height requirement and limitation can be met. This is because many business advertisements excessively occupy building walls.
To begin with, we properly set thresholds for the proposed and conventional methods. This is achieved empirically as follows. For several days, we observe and record many FFT magnitudes of environment noise within the detection zone of each lane under the conditions with no vehicles or with vehicles. To demonstrate this, we display
Figure 14.
Figure 14a is a snapshot of those observations within the detection zone of each lane under the conditions with no vehicles while
Figure 14b is under the conditions with vehicles. Subsequently, we approximate the average of ensemble FFT peaks of noise within a lane as the threshold value corresponding to the lane. As a result, 22, 21, 15 and 15 are given as threshold values for lanes A, B, C and D, respectively.
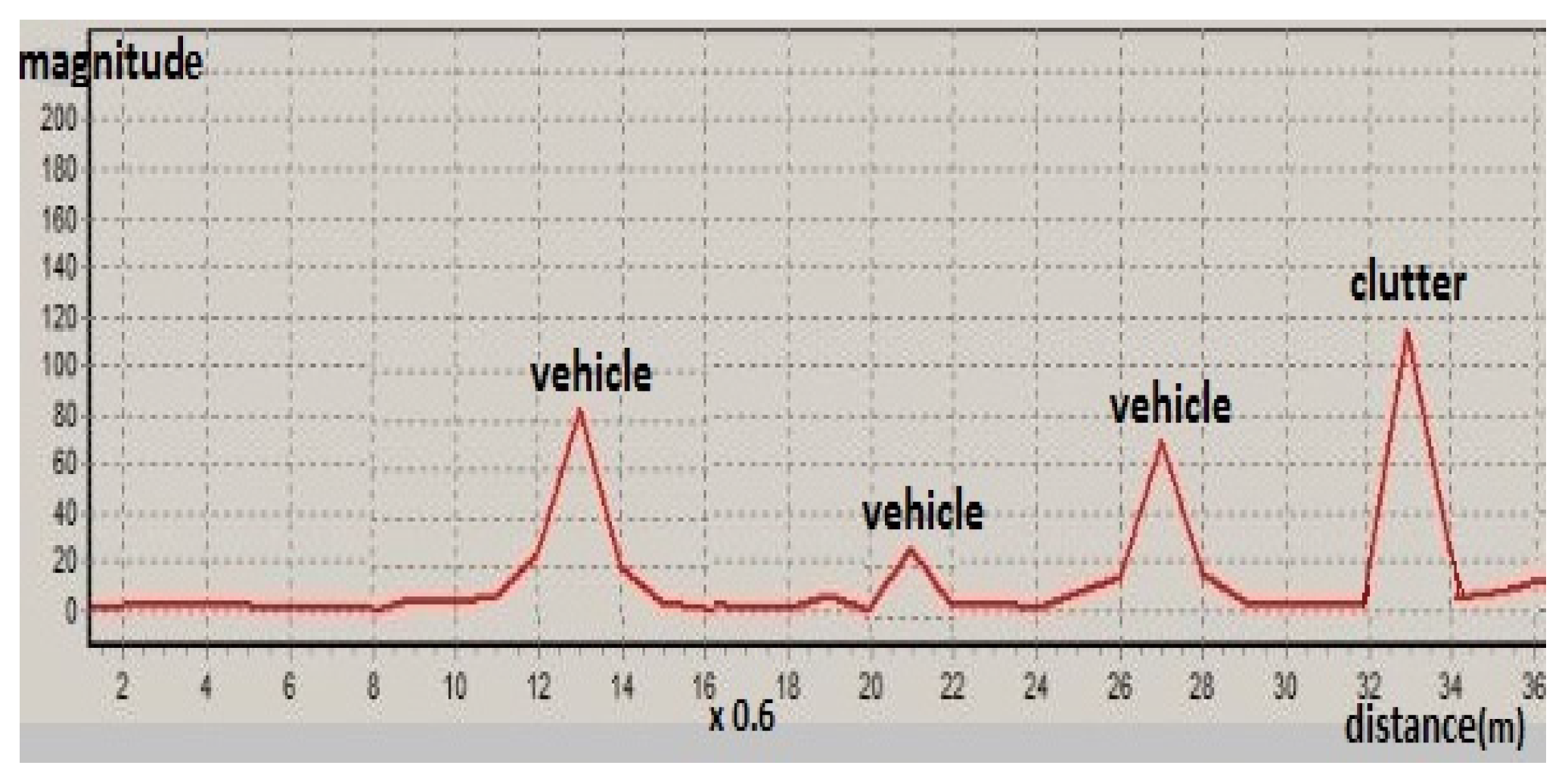
Figure 15 is a snapshot of the edged FFTs of received vehicle signals and clutter after the threshold values are applied. The threshold value for the conventional method is chosen as 31 because for many times, the value 31 is instantaneously observed and recorded as the overall maximum FFT peaks of noise within all lanes. An instance is shown in
Figure 14b.
Though the aforementioned threshold selection process is utilized for our experiments herein, it can also be used at other test sites. However, selected threshold values for one site can be very different from those for the other places.
For each method, the detection accuracy of lane vehicle flow (LVF) for lane
with
, is evaluated based on
For each method, the detection accuracy of directional traffic volume (DTV) for lanes
and
with
is evaluated based on
The actual vehicle no. of a lane is counted once at each time as long as a vehicle passes the pre-selected exit point of the detection zone of the lane. Therefore, if a vehicle makes and completes a lane change when it passes the detection zone, we count one as the actual vehicle no. in current lane while zero as the actual vehicle no. in previous lane. This ensures that the actual vehicle no. of a lane at each time block is obtained with no double counts. Accordingly, Equations (5) and (6) would not incorrectly increase the detection accuracies of LVF and DTV.
5.2. Experimental Results
We undertake many experimental tests during various time periods for several work days. Specifically, we evaluate the performance of algorithms during representative time blocks of light, moderate, and busy traffic conditions. Time slots of midnight, noon, and morning and evening rush hours are accordingly taken into account. Experimental results are given in
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7,
Table 8,
Table 9,
Table 10,
Table 11 and
Table 12.
Table 1,
Table 2 and
Table 3,
Table 4,
Table 5 and
Table 6 and
Table 7,
Table 8,
Table 9,
Table 10,
Table 11 and
Table 12 show the performance comparisons for light, moderate and rush-hour traffic, respectively. The traffic detection accuracies of the experiments are consistent for the same time slot of work days. In other words, they are unbiased and reliable.
The results show that LVF and DTV detection accuracies given by the proposed methods are significantly higher than those by the conventional method. It is noted that DTV detection accuracy of each proposed method is nearly perfect. Moreover, the proposed method 2 generally achieves better LVF detection accuracy than the proposed method 1. Accordingly, it is confirmed that the proposed methods can tackle the problem of lane-crossing FFT side lobes more appropriately. In addition, the proposed method 2 can achieve the best overall performance among the schemes tested.
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7,
Table 8,
Table 9,
Table 10,
Table 11 and
Table 12 show that the detected vehicle number of lane A (lane D) given by the proposed methods tend to be less than the actual vehicle number. Conversely, the detected vehicle number on lane B (lane C) given by the proposed methods tends to be more than the actual vehicle number. This phenomenon may be explained by using road site traffic conditions. A car within lane A (lane D) may be driven close to or may slightly cross the borderline between lanes A and B (lanes D and C) for avoiding motorcycles and bicycles on the sideway beside lane A (lane D). Therefore, the magnitude peak of an edged FFT main lobe which should belong to lane A (lane D) may appear within lane B (lane C). However, since separation blocks are between lanes B and C, lane B (lane C) drivers cannot do what lane A (lane D) drivers do. The gain of the vehicle number within lane B (lane C) and the loss of the vehicle number within lane A (lane D) are almost balanced. Therefore, the proposed methods achieve very high DTV detection accuracy.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}