1. Introduction
The sliding mode filter [
1,
2] employing a certain kind of parabolic-shaped sliding surface has been studied for effectively removing noise in feedback control of mechatronic systems. One of major advantages of the filter is that its output converges to the input when a constant input is provided. In addition, the filter does not require a dynamic model. The sliding mode filter has been recognized one of the most effective and robust filters, and its evaluation results [
3,
4,
5] and applications [
6,
7,
8,
9,
10,
11,
12,
13,
14] have been reported in the literature. However, the filter is prone to overshooting.
In response to the drawbacks of the sliding mode filter [
1,
2], Jin et al. [
15] presented a new parabolic sliding mode filter, which is referred to as PSMF. It is reported [
16,
17] that PSMF is advantageous over the filter referred to in [
1,
2] and linear filters because it is less prone to overshooting and produces smaller phase lag. After that, Jin et al. [
18] presented an adaptive-gain parabolic sliding mode filter, referred to as AG-PSMF, by extending PMSF. In that work, Jin et al. stated that AG-PSMF effectively removes noise by balancing the tradeoff between the filtering smoothness and the suppression of delay [
18]. However, due to the strong nonlinearity, theoretical evaluation and corresponding result-based parameter tuning guidelines remained as open problems for future study.
To respond to these problems, in an alternative manner this paper provides insight into the issues of quantitative performance evaluation and parameter tuning of AG-PSMF through numerical analysis. Specifically, the contribution of the paper is two-fold. It (1) quantitatively evaluates the performance of AG-PSMF under different parameter values and input signals; and (2) based on the results of the quantitative evaluation, the paper presents practical tuning guidelines for AG-PSMF.
The rest of this paper is organized as follows:
Section 2 provides an overview of parabolic sliding mode filters;
Section 3 quantitatively evaluates the performance of AG-PSMF;
Section 4 presents tuning guidelines of AG-PSMF based on the evaluation results;
Section 5 validates the effectiveness of the presented guidelines through numerical examples; and
Section 6 covers concluding remarks.
2. Parabolic Sliding Mode Filters
This section provides an overview of parabolic sliding mode filters for understanding of the presented analysis in the following sections.
In Reference [
15], Jin et al. presented a sliding mode filter that employs a parabolic-shaped sliding surface (PSMF), of which continuous-time representation is given as follows:
where
is the input,
is the output,
is the derivative of
, and
and
are constants. In addition,
is the following set-valued signum function:
where
is a scalar.
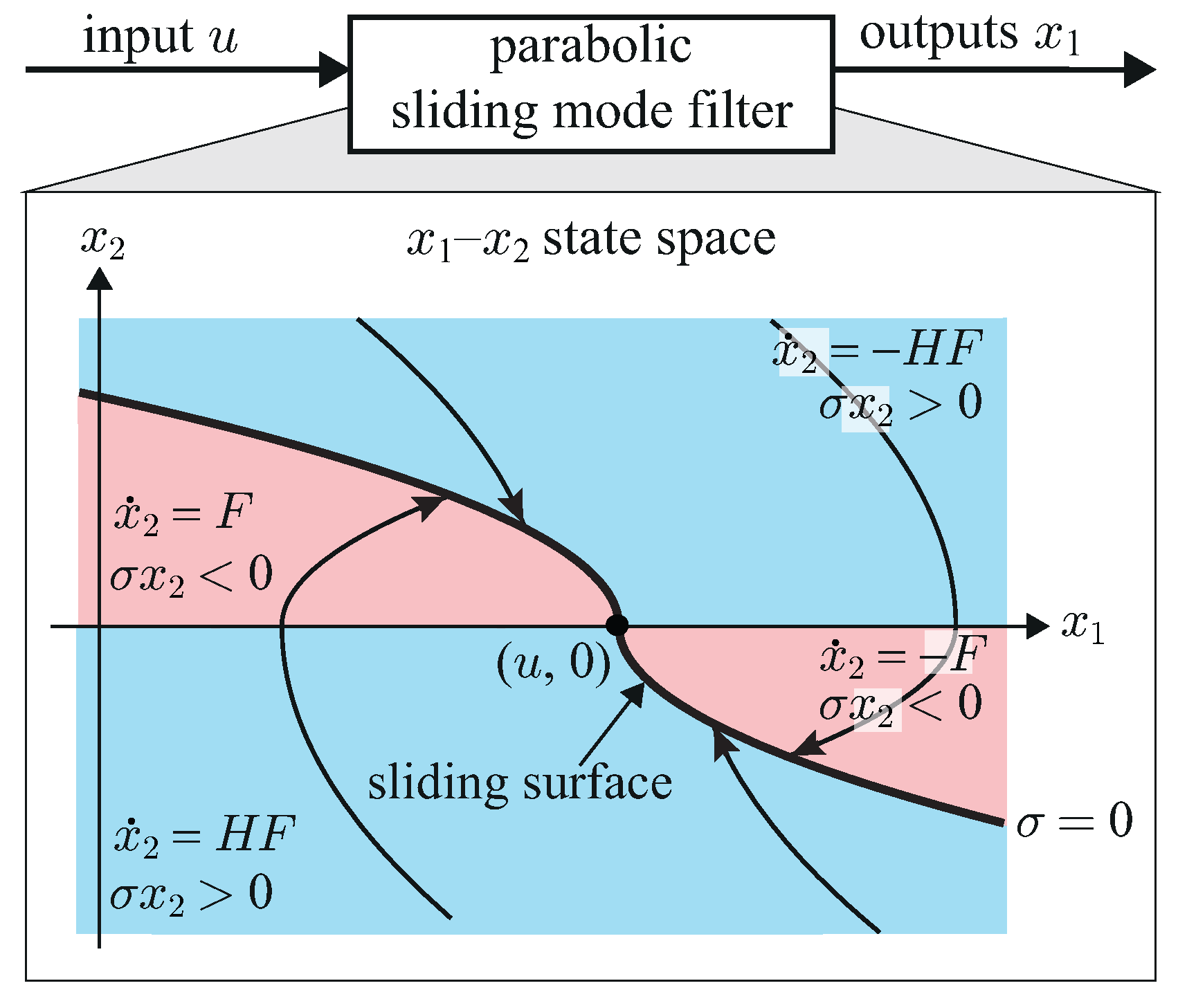
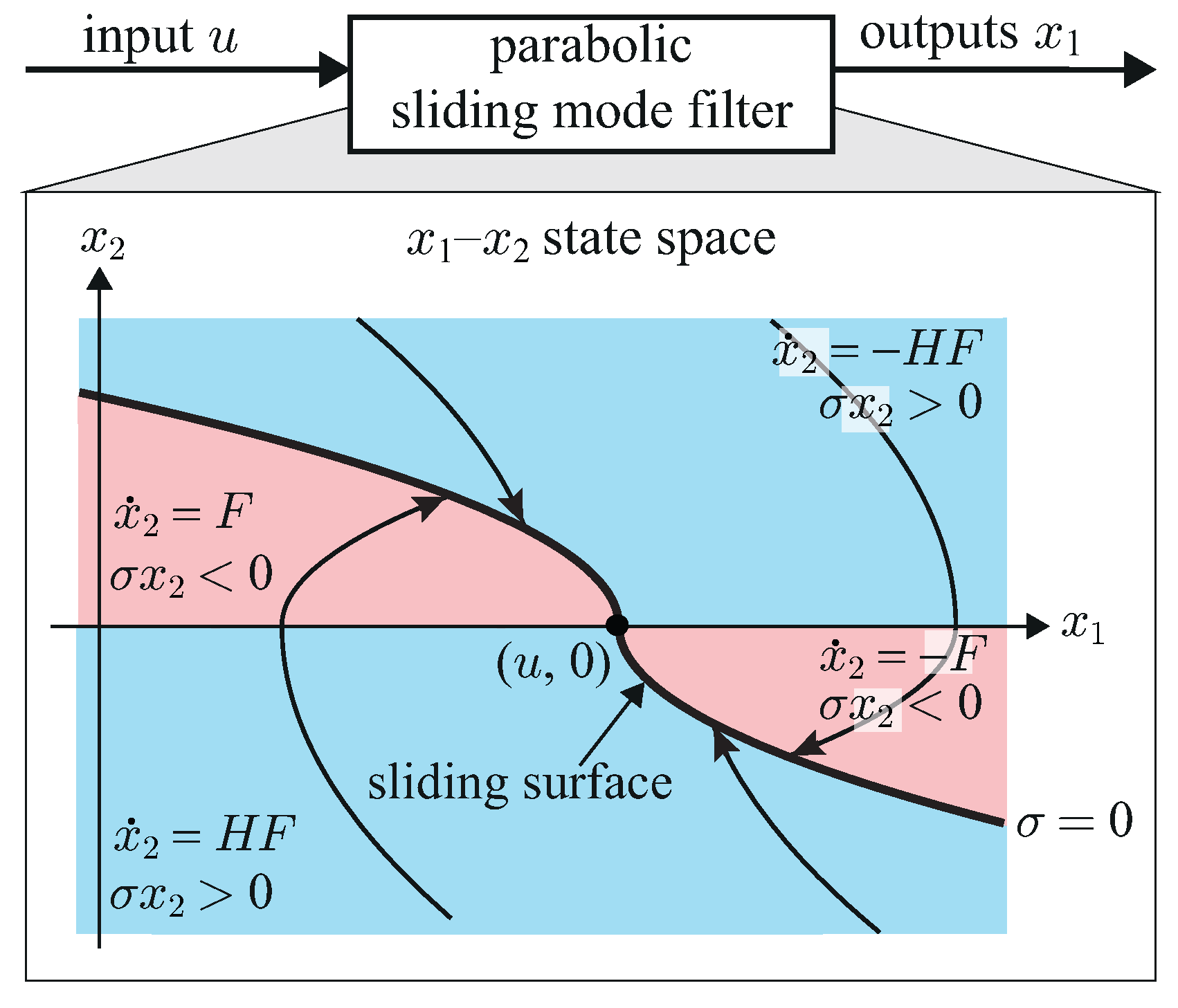
Figure 1 shows the sliding surface and state trajectories of PSMF in
–
space. In PSMF,
can be seen as the
acceleration of the output
, and
F can be considered as the gain of the
acceleration.
The paper [
15] also presented the following discrete-time algorithm of PSMF, which is derived by using the backward Euler discretization (i.e., by replacing
by
):
| Algorithm 1 PSMF |
- 1:
- 2:
- 3:
- 4:
.
|
Here,
T is the sampling interval,
k is the discrete-time index, and
and
are functions defined as follows:
where
and
satisfy
. In Algorithm 1,
is the value of
that satisfies
, and
is determined in order to follow
under the constraint of
acceleration. It should be mentioned that, owing to the use of backward Euler discretization, the discrete-time implementation of PSMF does not produce chattering, which has been considered as a common problem of sliding mode techniques.
It is reported [
16,
17] that the noise removing capability of PSMF is almost the same as that of second-order Butterworth low-pass filter (2-LPF), but PSMF produces smaller phase lag than 2-LPF does. In addition, compared with the filter in [
1,
2], PSMF produces smaller phase lag , and it is less prone to overshooting. The effectiveness of PSMF has been experimentally validated [
16,
17]. However, due to the fixed
acceleration gain
F, the output of PSMF cannot follow an input in which the
acceleration exceeds that of PSMF, whereas the output becomes sensitive to the noise contained in the input of which
acceleration is far below that of PSMF.
With respect to the above-mentioned limitation of PSMF, Jin et al. presented an adaptive-gain parabolic sliding mode filter (AG-PSMF), which is an extension of PSMF. Specifically, the complete algorithm of AG-PSMF is given as follows:
| Algorithm 2 Adaptive gain parabolic sliding mode filter (AG-PMSF) |
- 1:
- 2:
- 3:
- 4:
- 5:
- 6:
- 7:
- 8:
- 9:
- 10:
- 11:
- 12:
- 13:
.
|
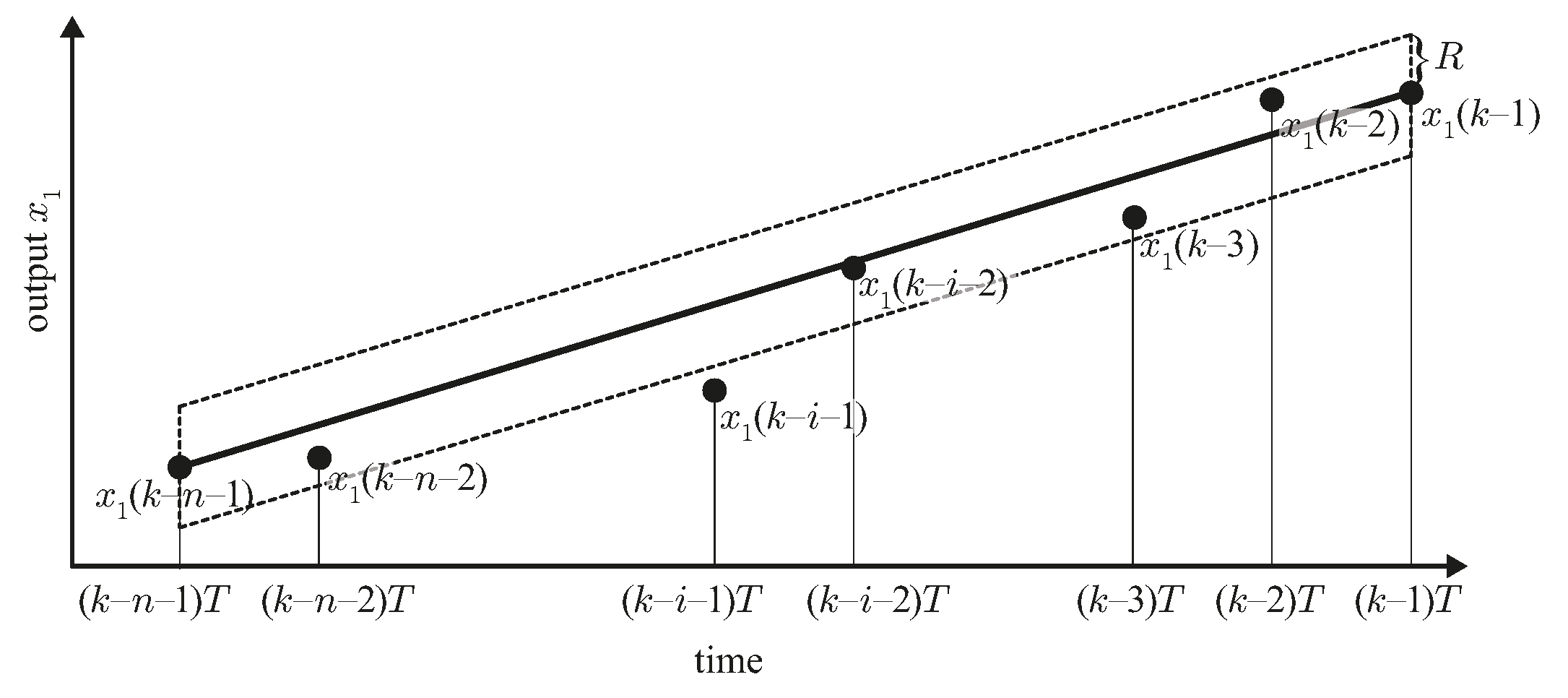
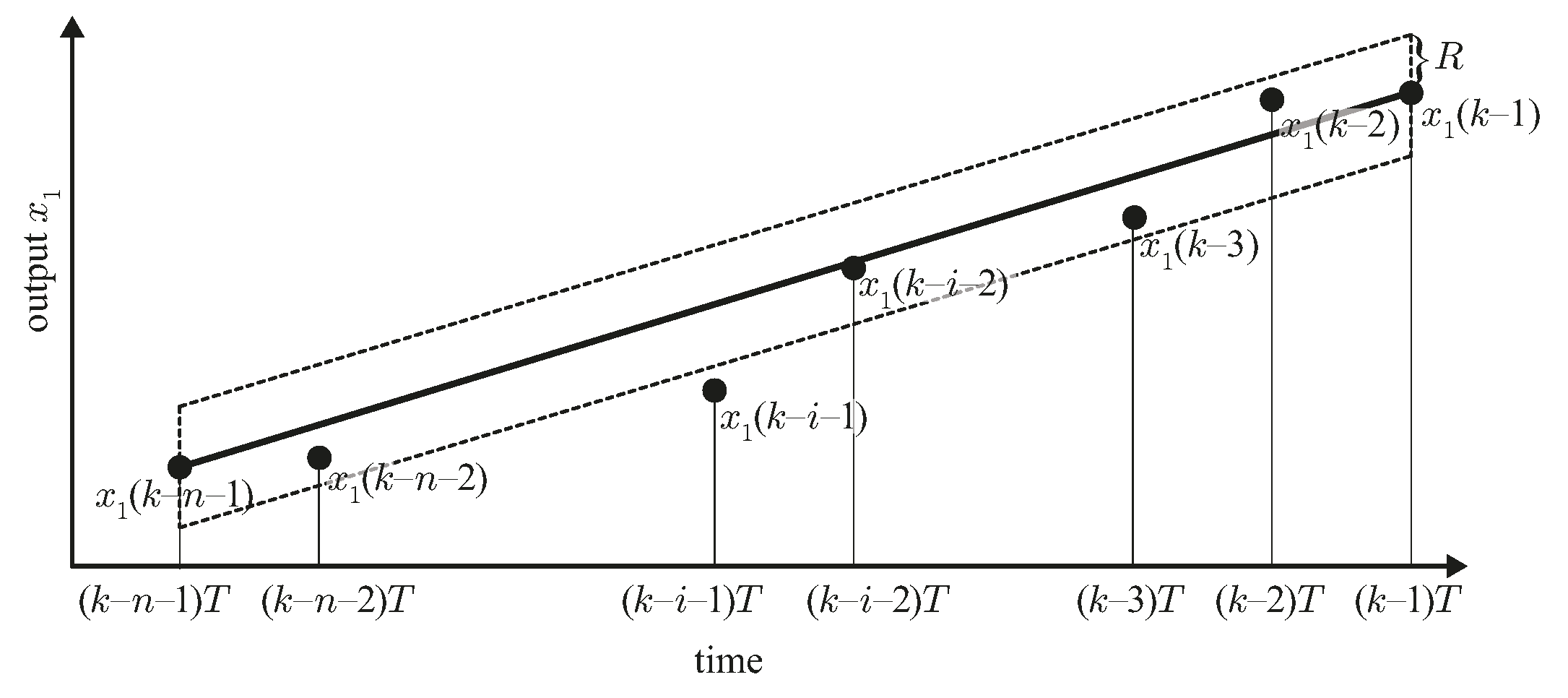
In AG-PSMF, i.e., Algorithm 2, steps 1–8 check whether all previous outputs are inside the area determined by the two end-outputs
and
and the constant R, as shown in
Figure 2. If it is the case, the window size
n is further increased. The increase of
n is continued until at least one previous output lies outside the area or
n reaches its maximum value
. Then, in step 9, gain
is obtained by applying the adaptively determined window size for balancing the tradeoff the output smoothness and the suppression of delay.
4. Tuning Guidelines of AG-PSMF
In practice, parameter values greatly influence system performances, and thus parameter tuning guidelines are important for systems to perform properly. However, in the case of AG-PSMF, the tuning of algorithm parameters remains empirical due to the difficulty of theoretical evaluation caused by strong nonlinearity.
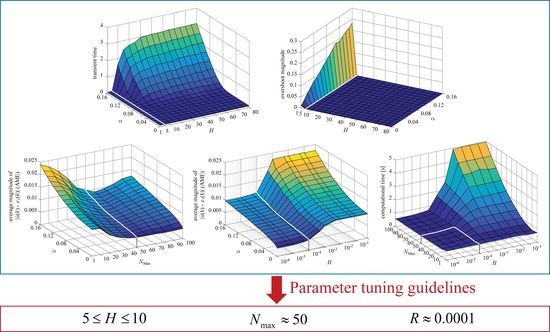
In response to this problem, as an alternative solution this section provides parameter tuning guidelines for AG-PSMF based on the results of numerical evaluation given in
Section 3. Specifically, the guidelines focus on the influence of different values of AG-PSMF’s three parameters
H,
and
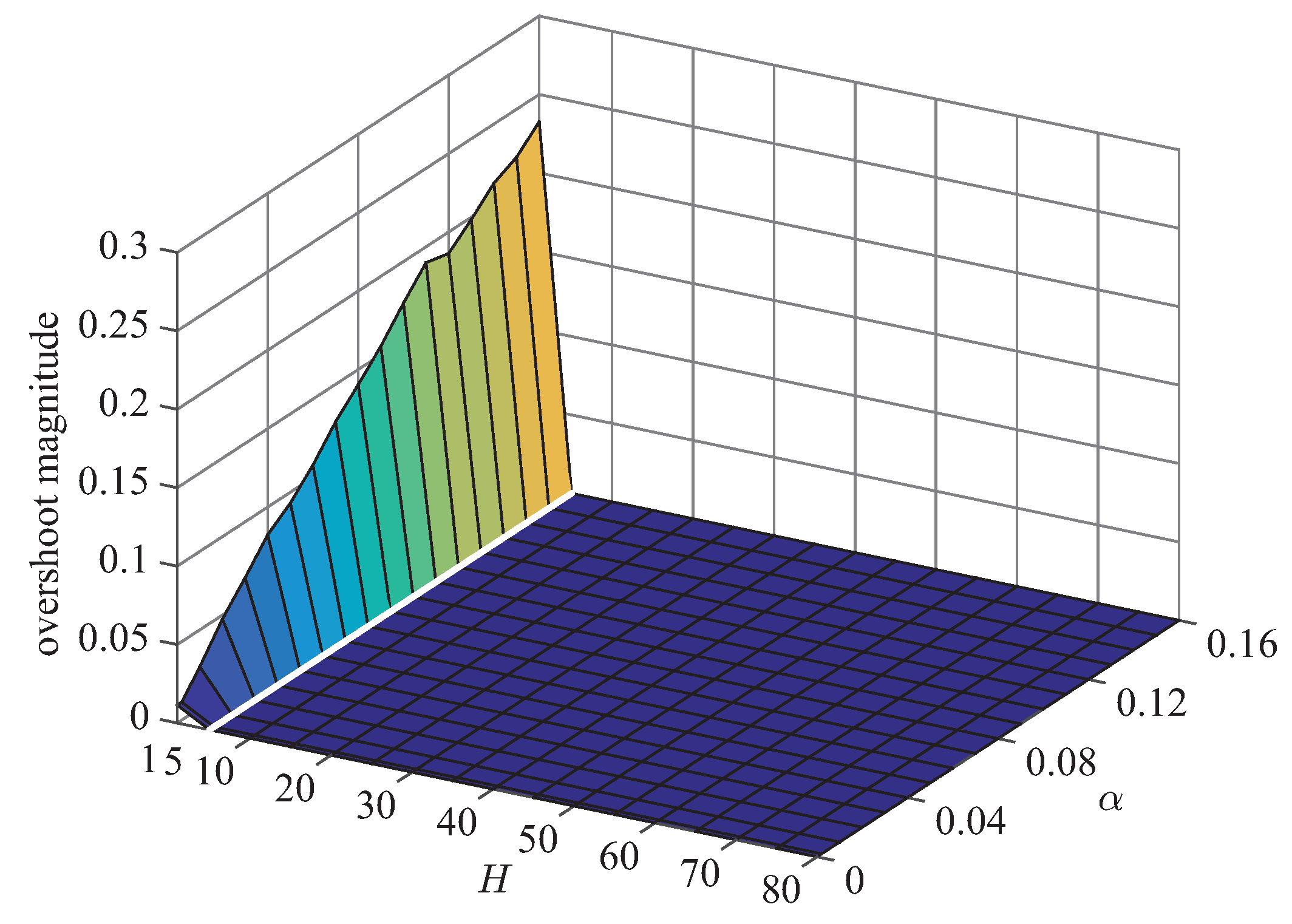
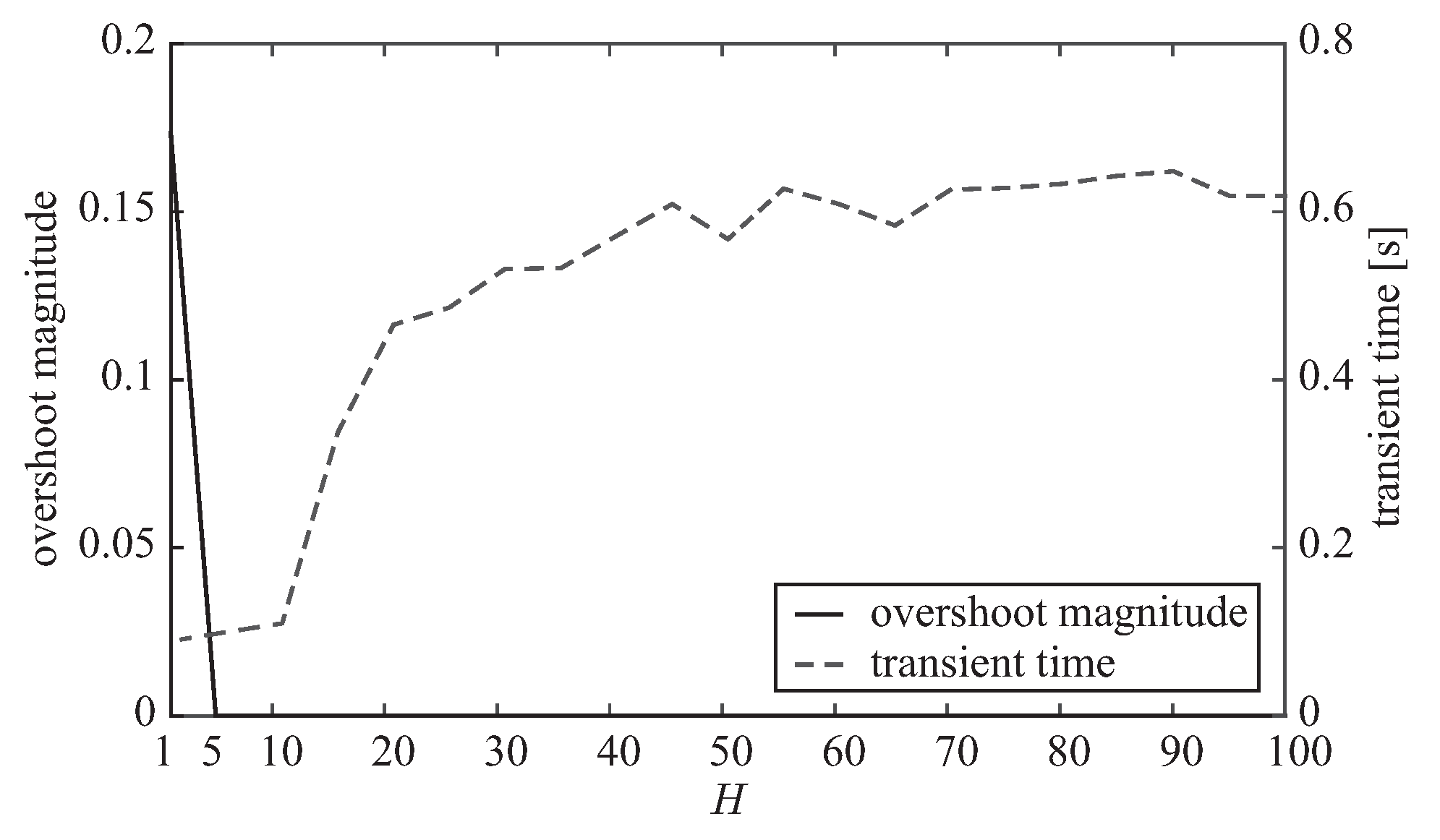
R on the four measurements transient time, overshoot magnitude, tracking error (i.e., AME) and computational time. It should be said that, for a better filtering performance, the values of all four measurements should be kept small. Given this requirement, tuning guidelines for AG-PSMF’s parameters are derived as follows.
4.1. Tuning Guideline for H
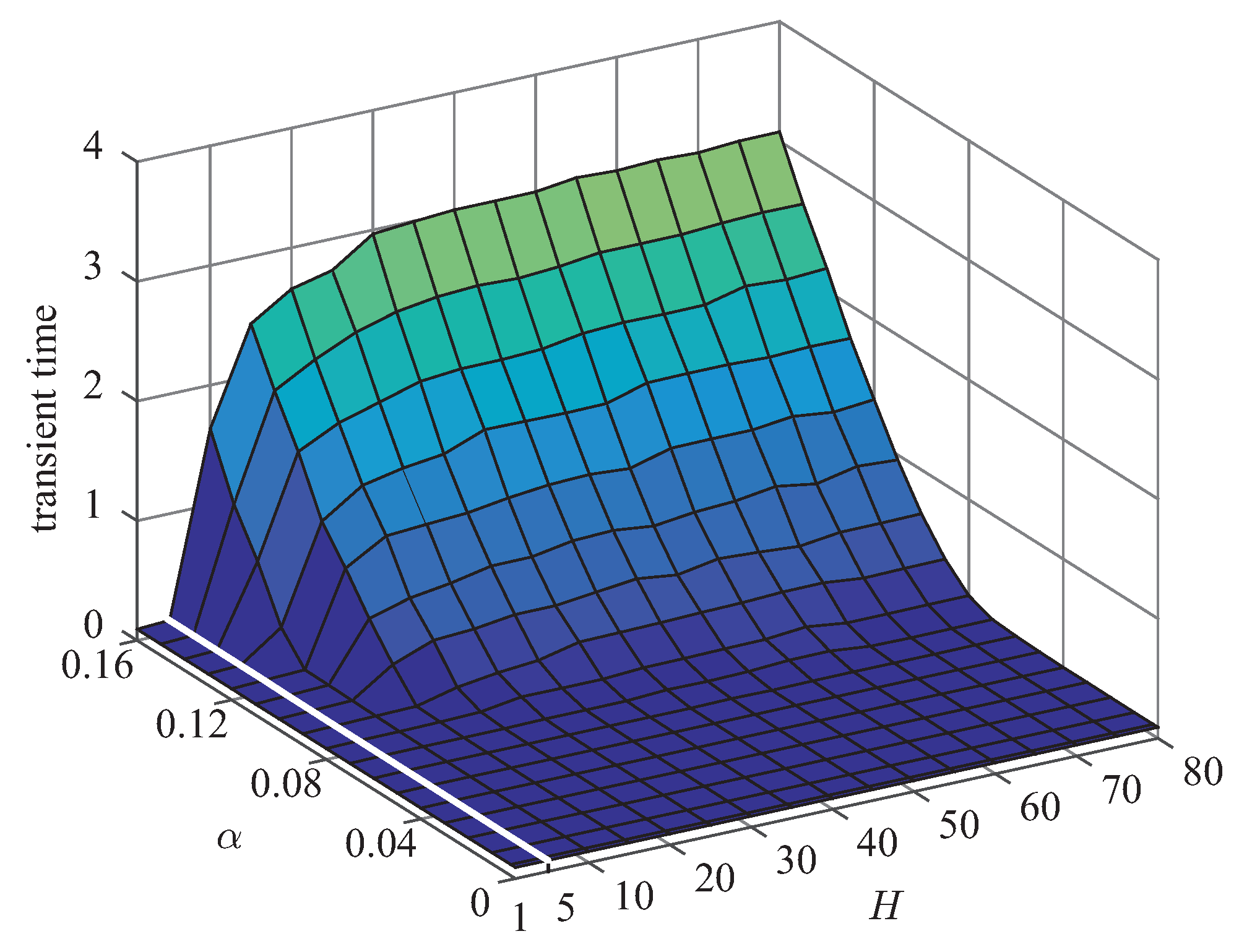
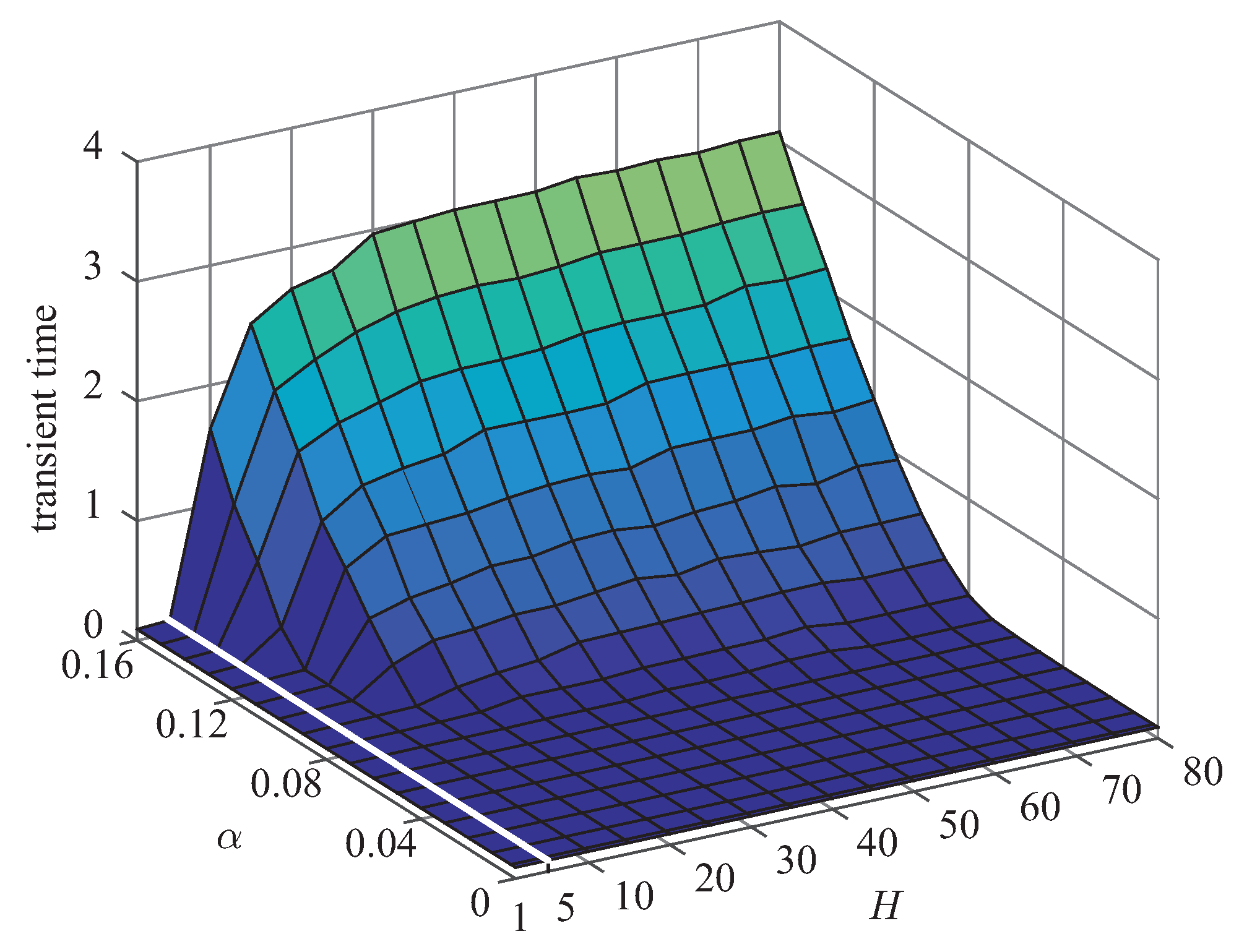
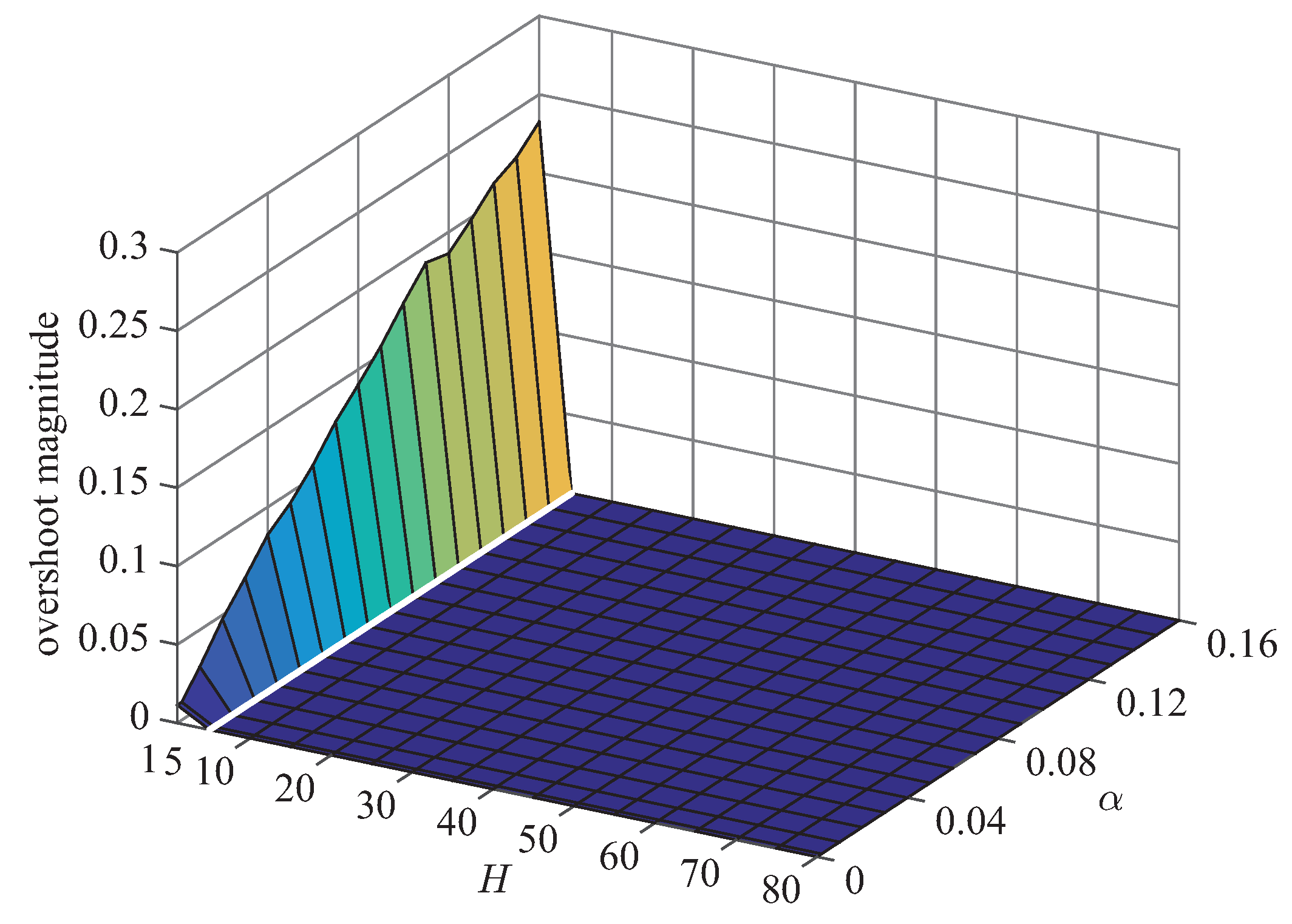
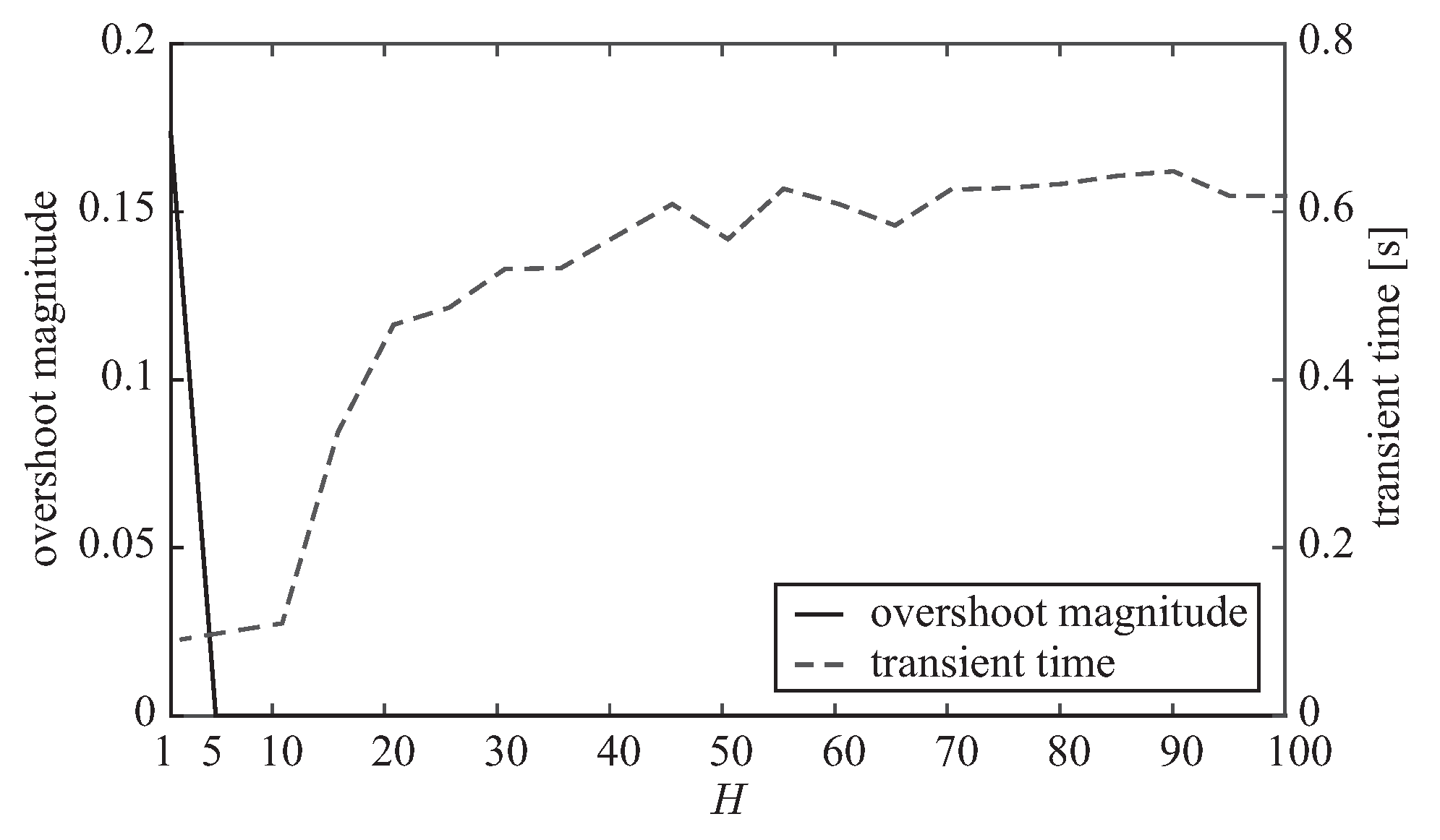
In
Section 3.1, it has been discussed that the increase of
H contributes to the suppression of overshoot but results in longer transient time. By carefully observing the response of AG-PSMF under different values of
H, as shown in
Figure 4,
Figure 5 and
Figure 6, one can notice that the optimum range of
H is around
. Under such a value of
H, AG-PSMF provides short transient time by producing a low level of overshoot.
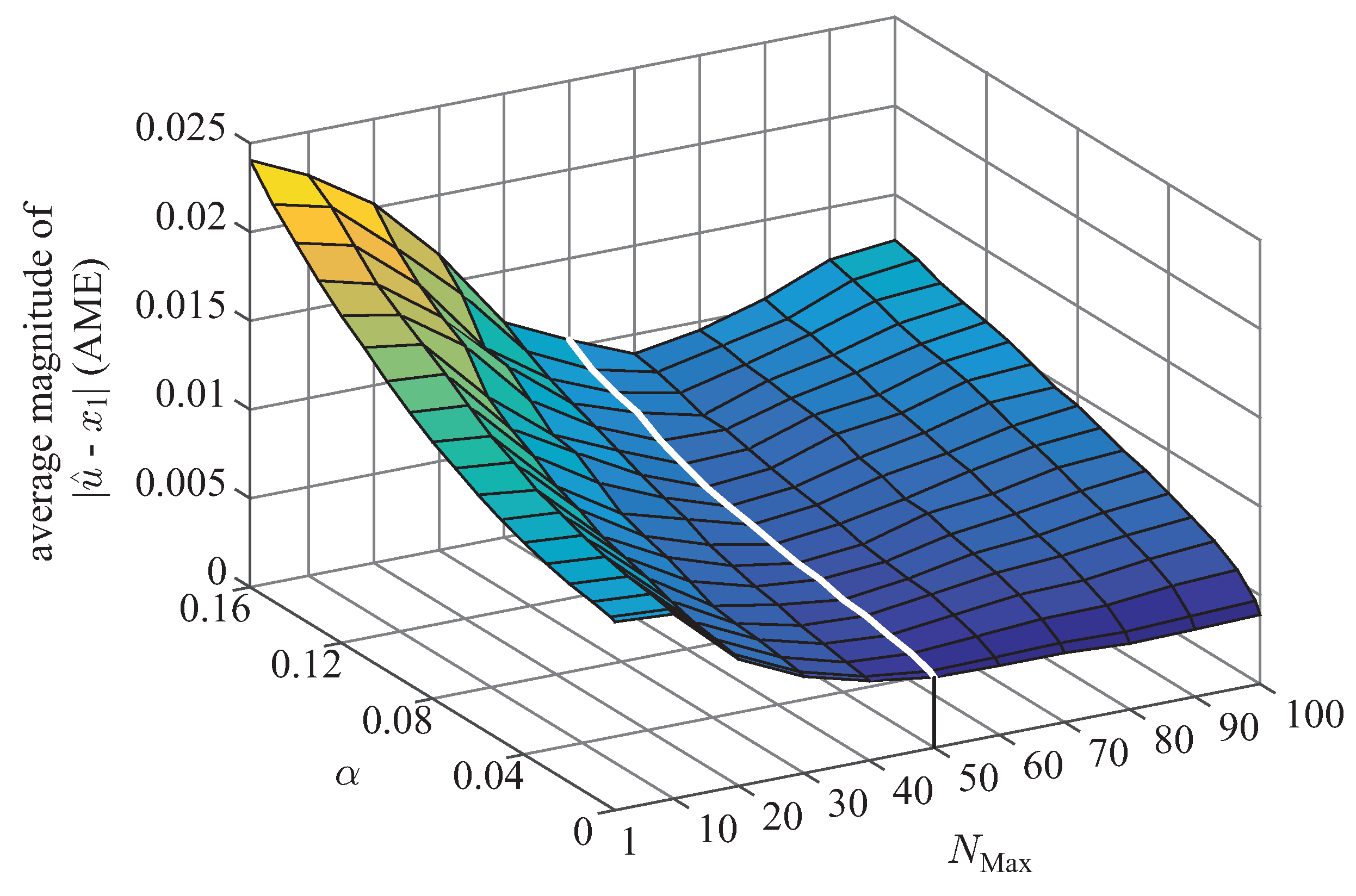
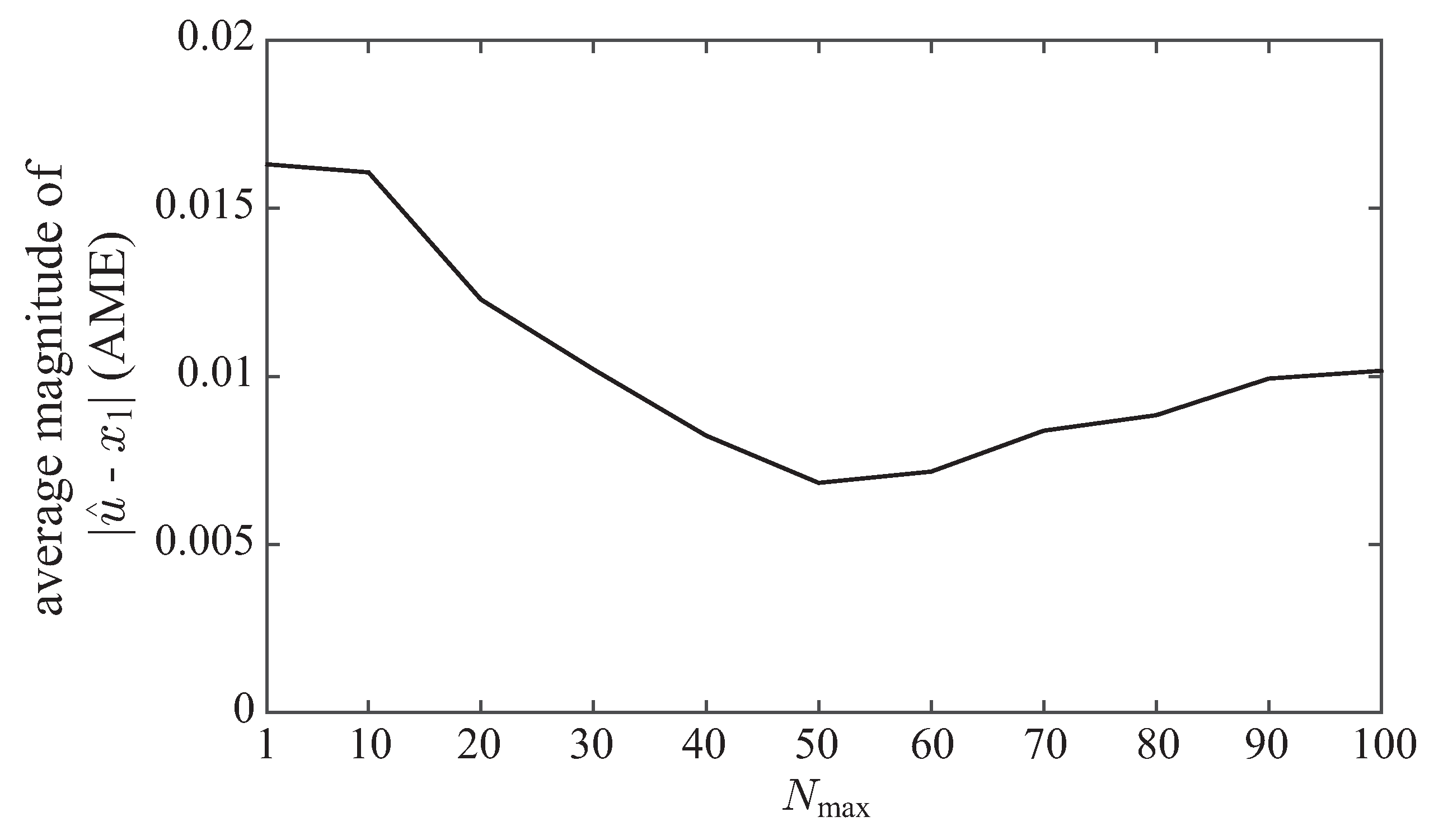
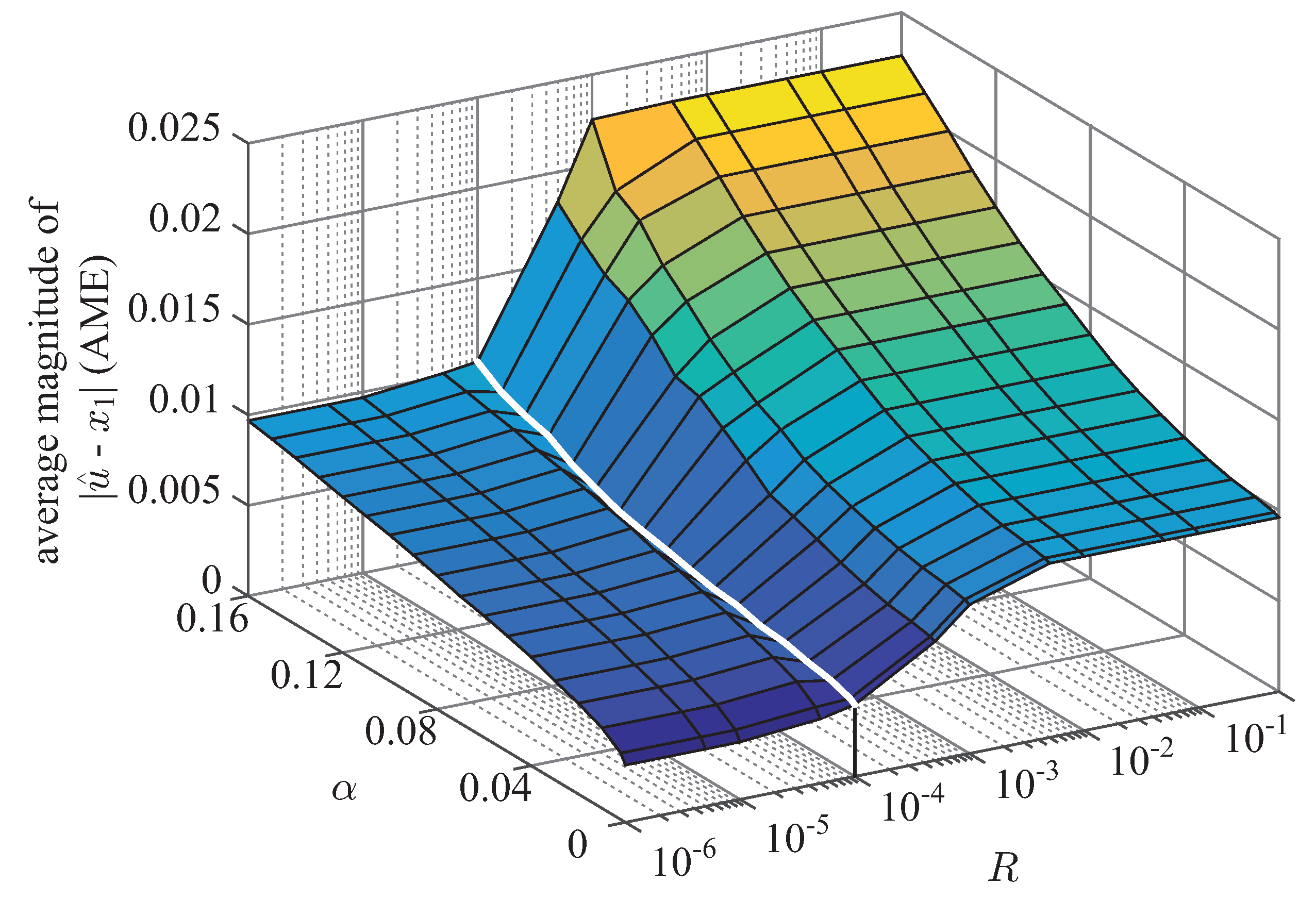
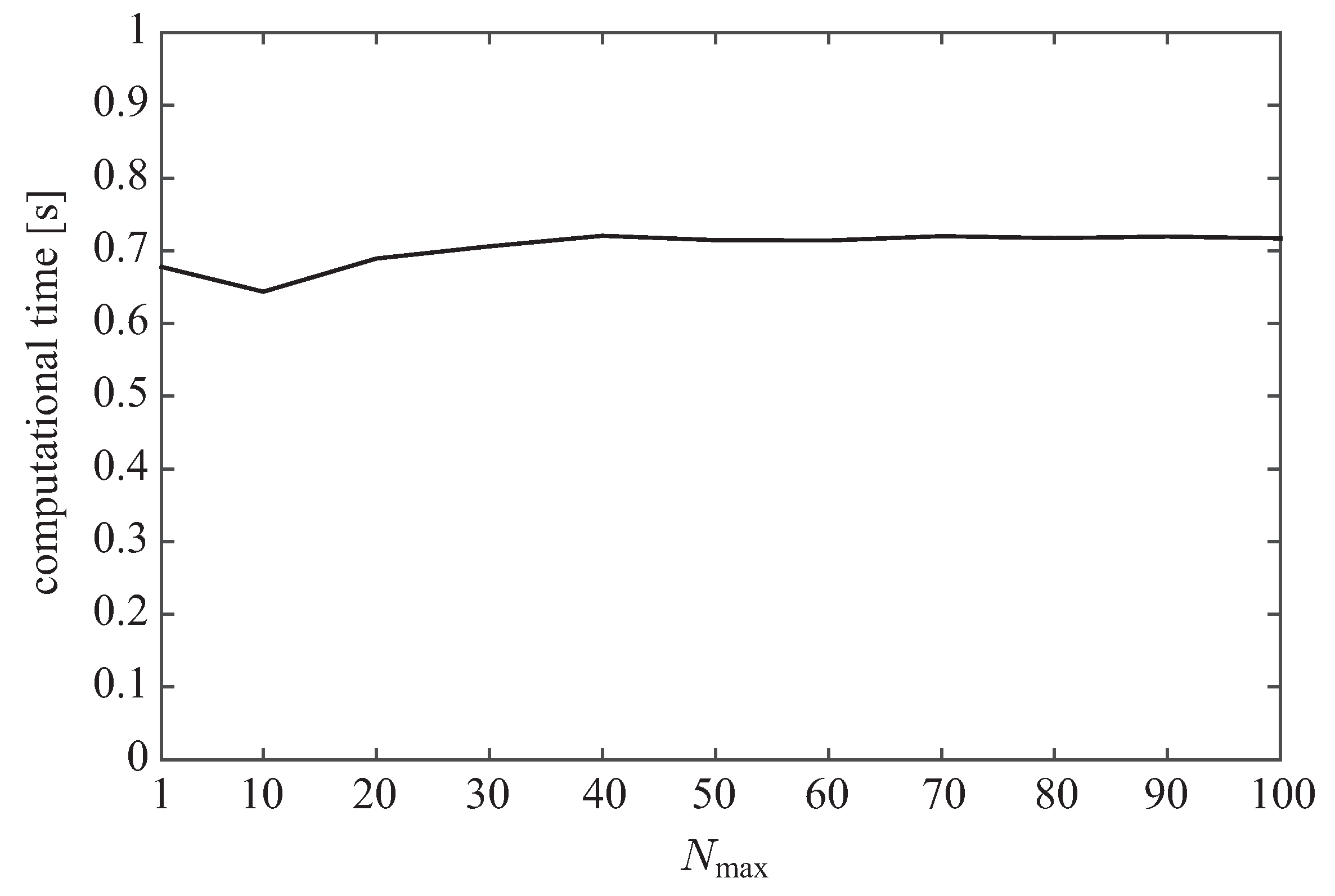
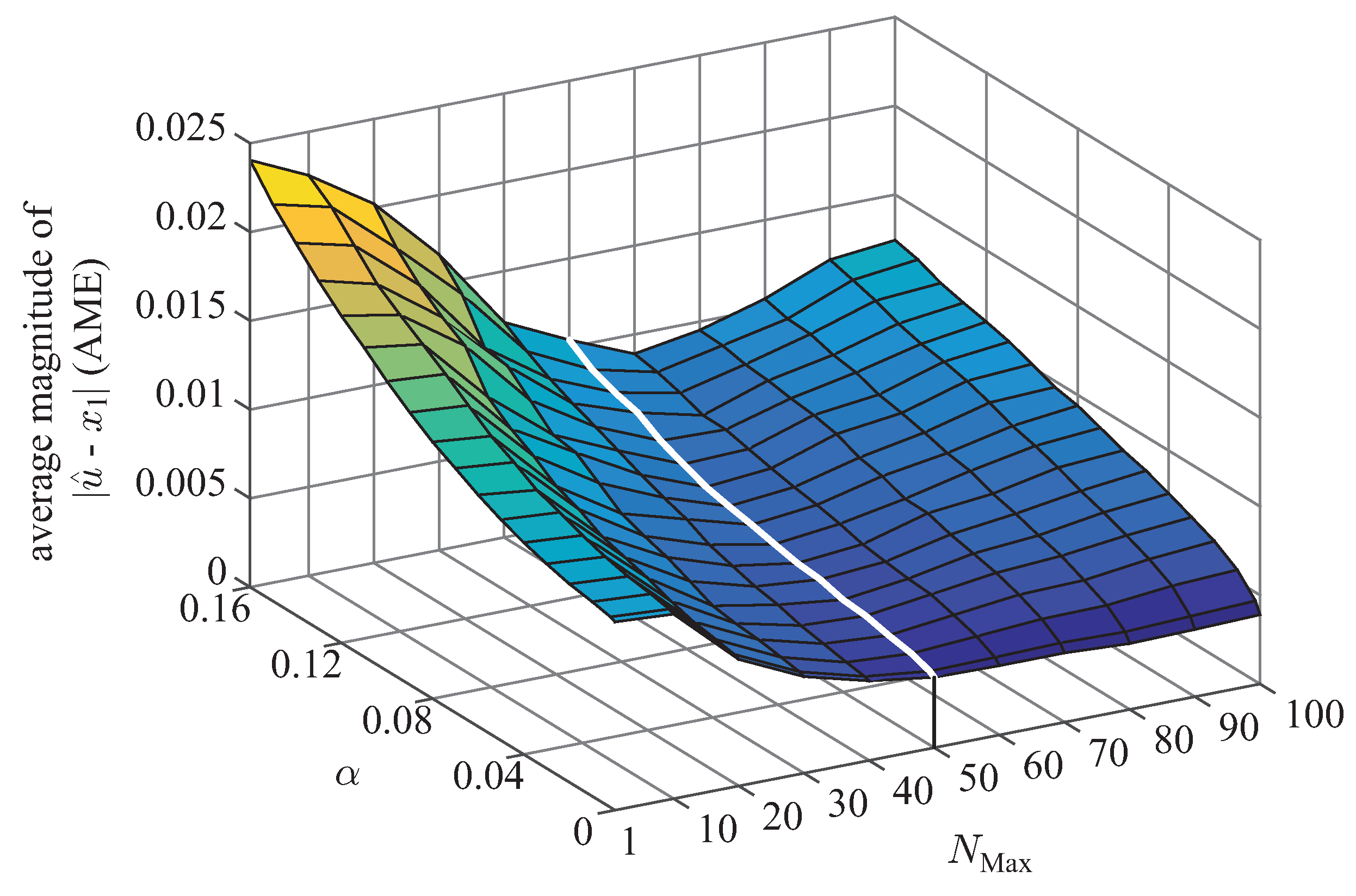
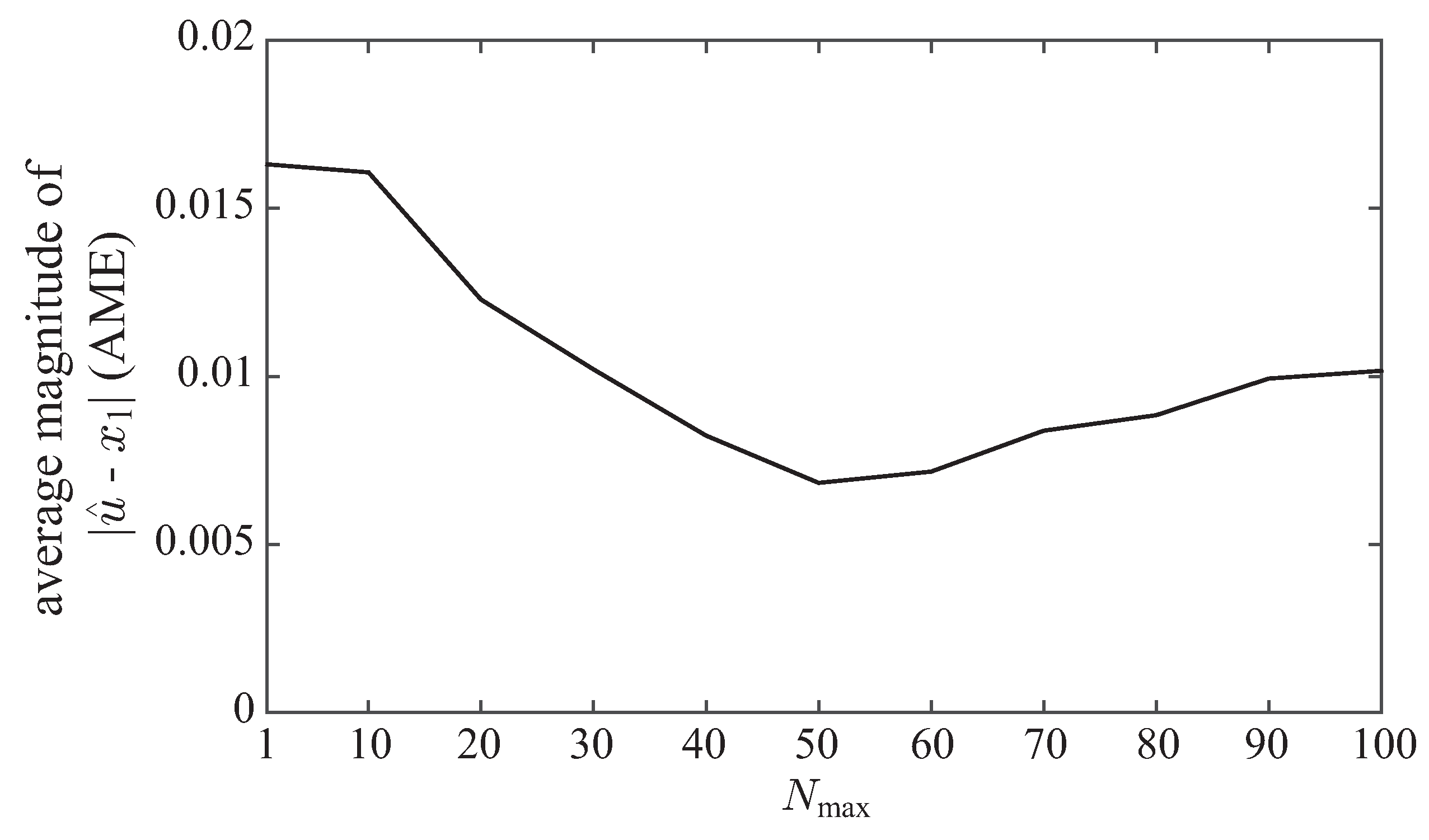
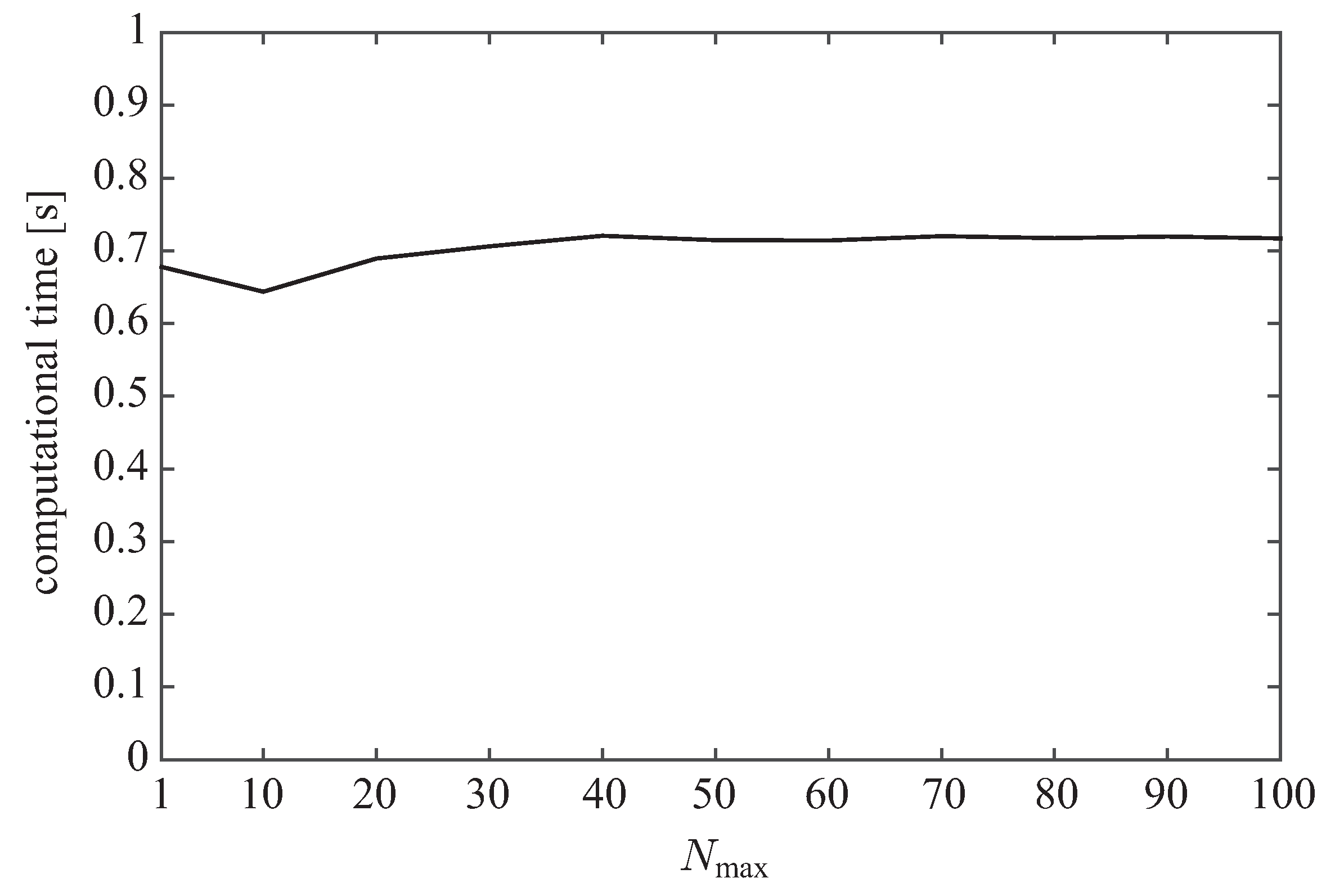
4.2. Tuning Guideline for
In
Section 3.2, it has been shown that the minimum AME appears around
. Thus, it is suggested that
should be set as around
. However, in the applications where the computational time is a major concern, it is advisable to set around
by considering the results of
Section 3.3. This is because under such values of
, AG-PSMF consumes slightly less computational cost while maintaining relatively low level of AME.
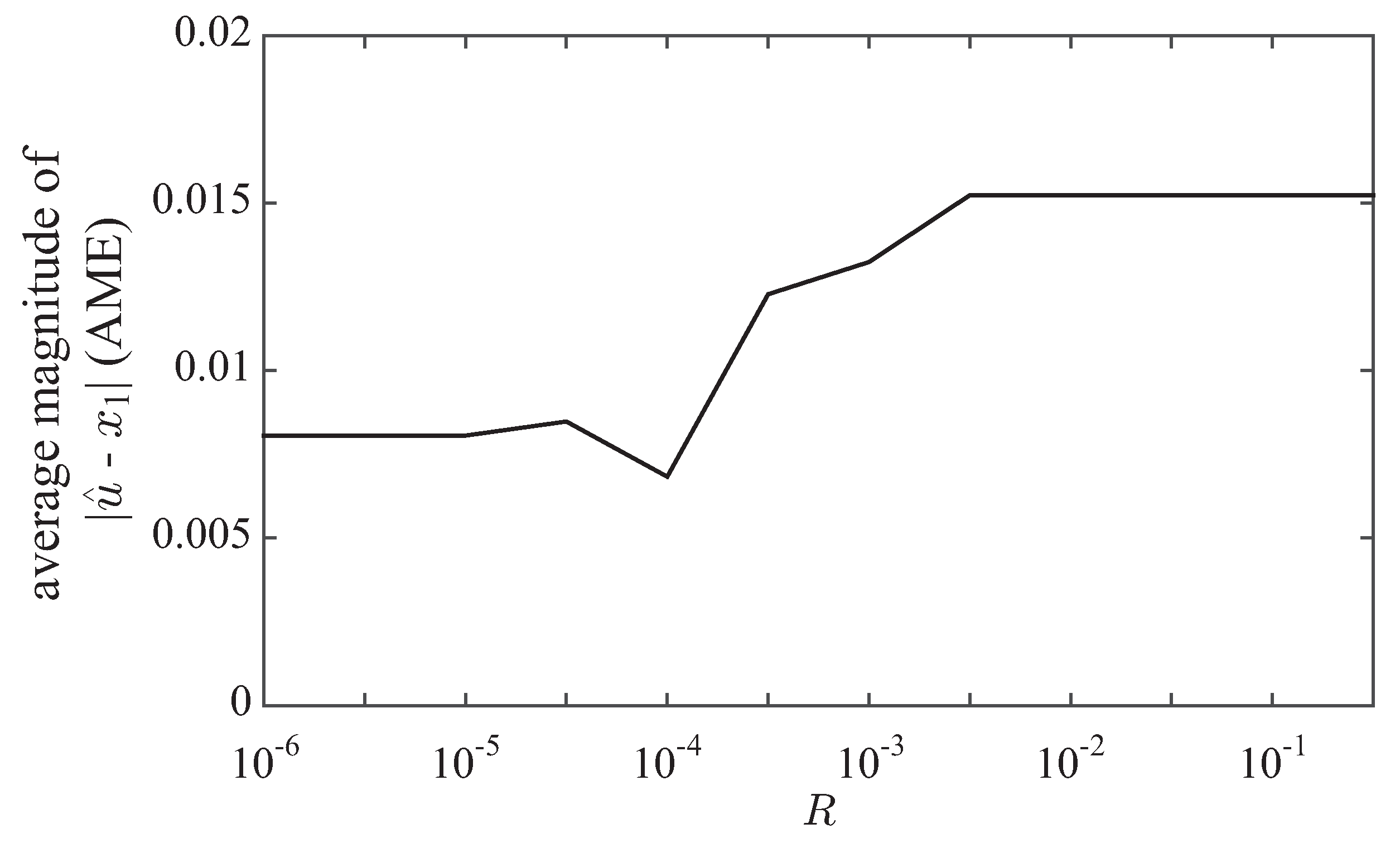
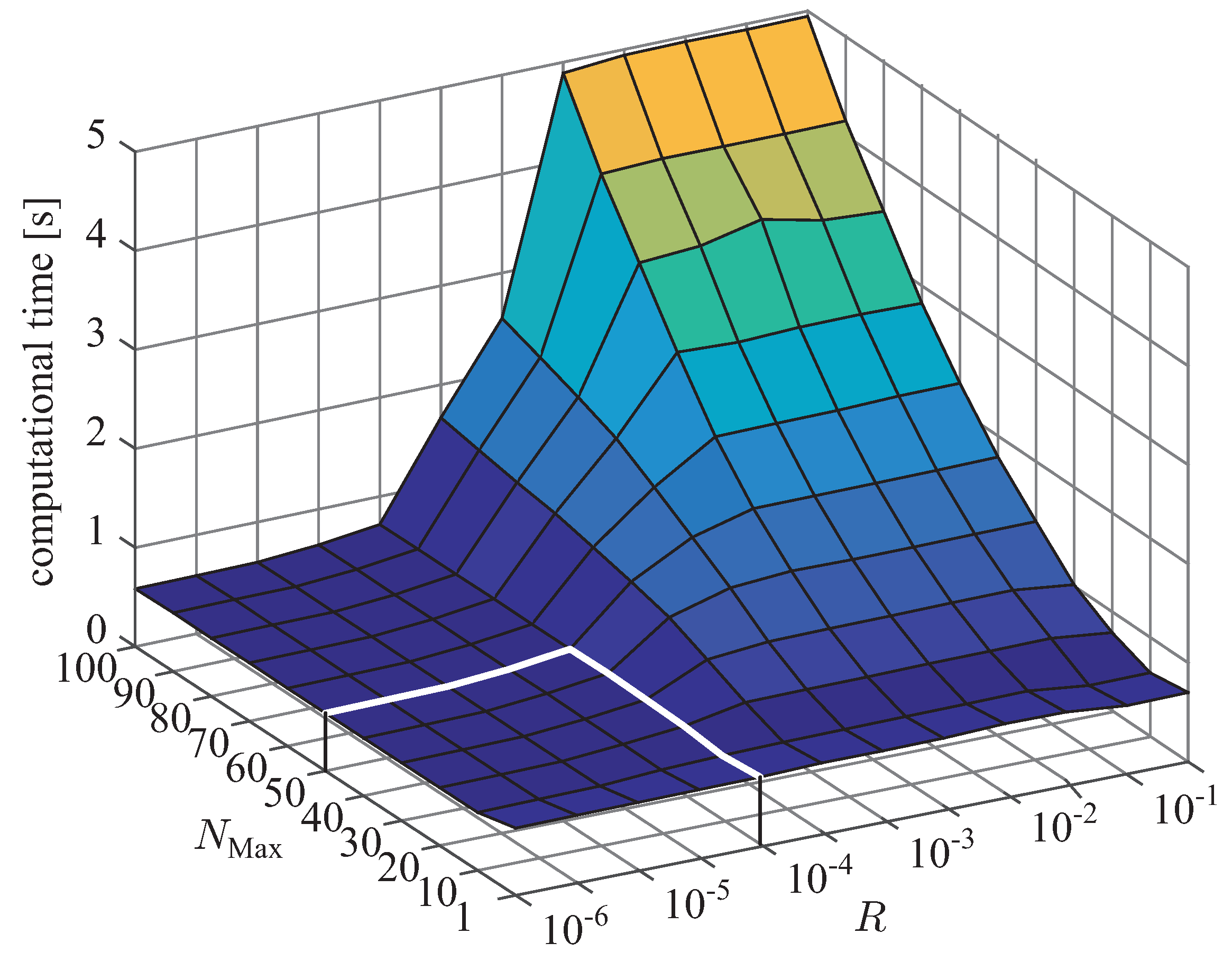
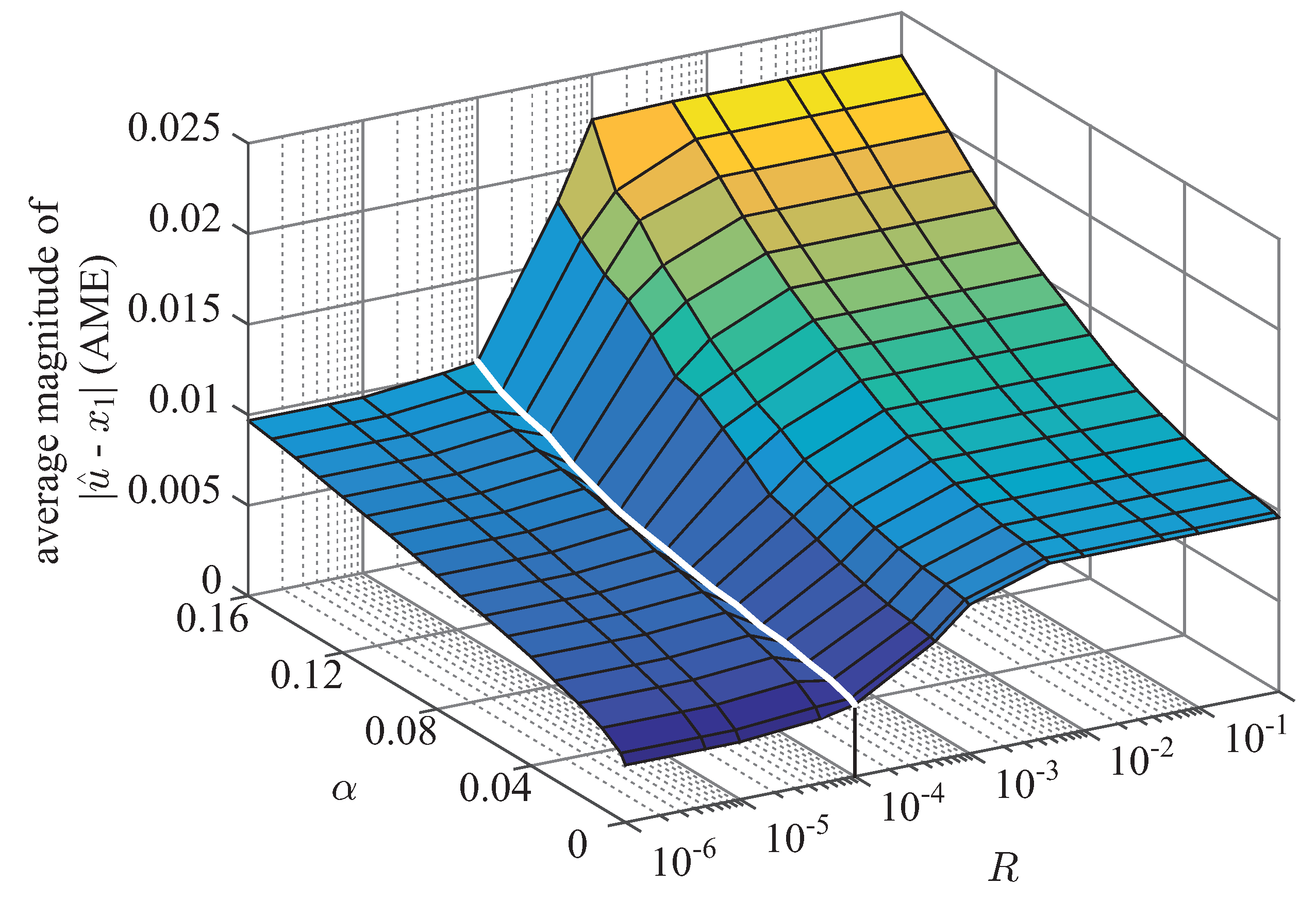
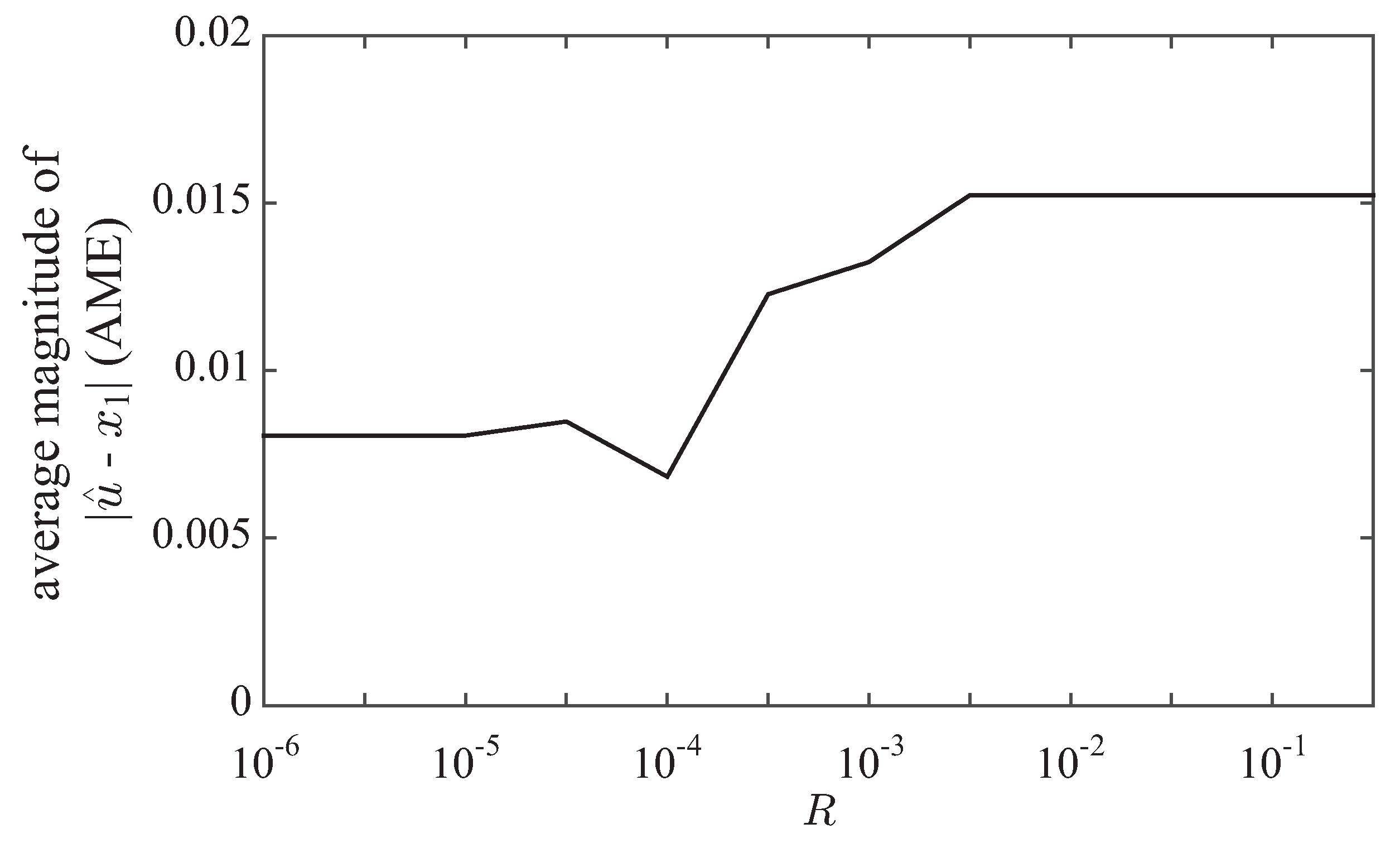
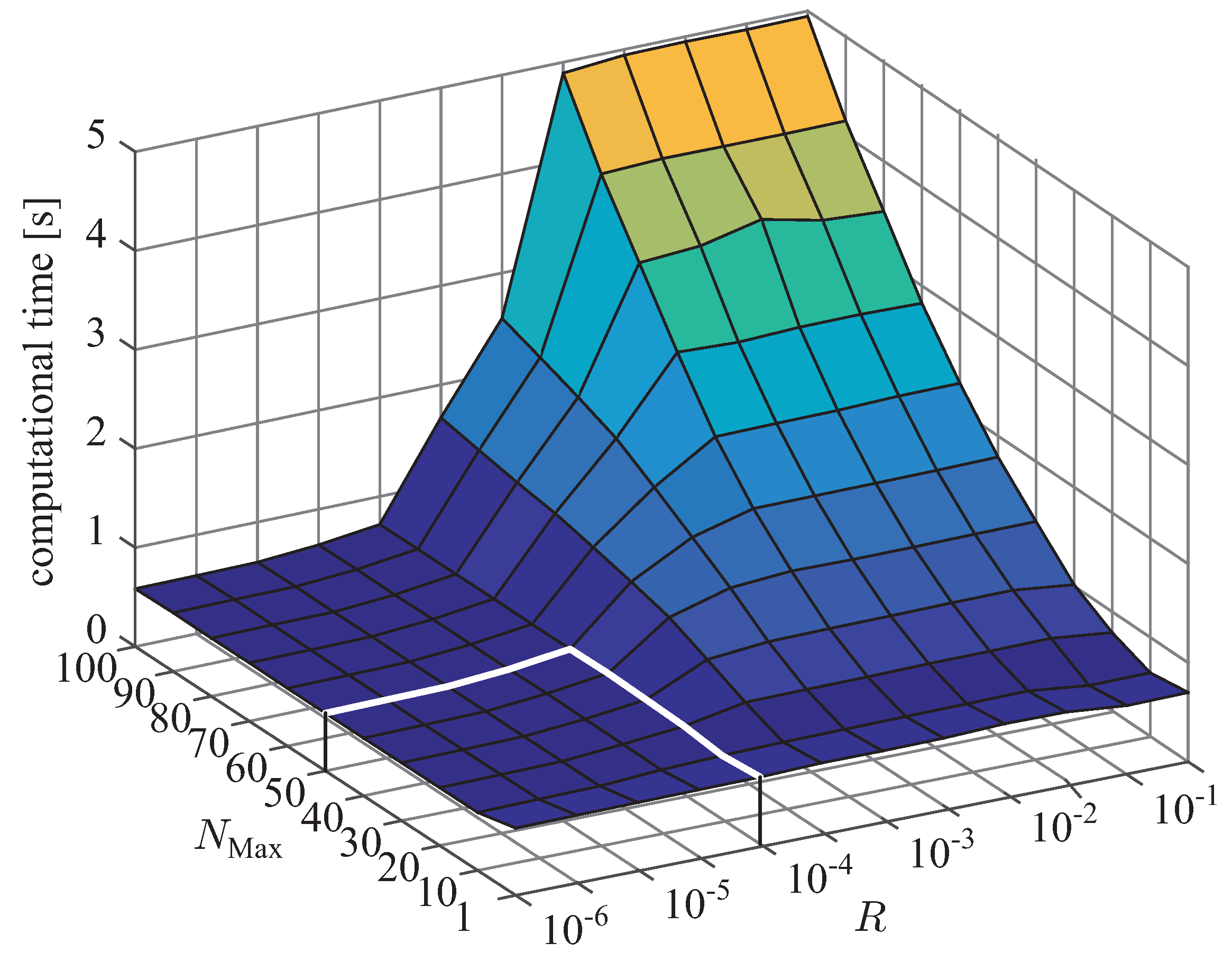
4.3. Tuning Guideline for R
In
Section 3.2, it has been observed that AME converges to the minimum value as
R approaches
. On the other hand, in
Section 3.3, it has been illustrated the the computational time is insignificant in the range of
, while it increases with the increase of
R in the range
. Thus, it is clear that the value of
R around
should be appropriate by considering both AME and computational time.
5. Numerical Examples
The effectiveness of the presented guidelines are now validated through numerical examples, the following sinusoidal signal is provided as the input of AG-PSMF:
According to the guidelines, the values of parameters are set as
,
, and
. Besides that,
and
s are applied.
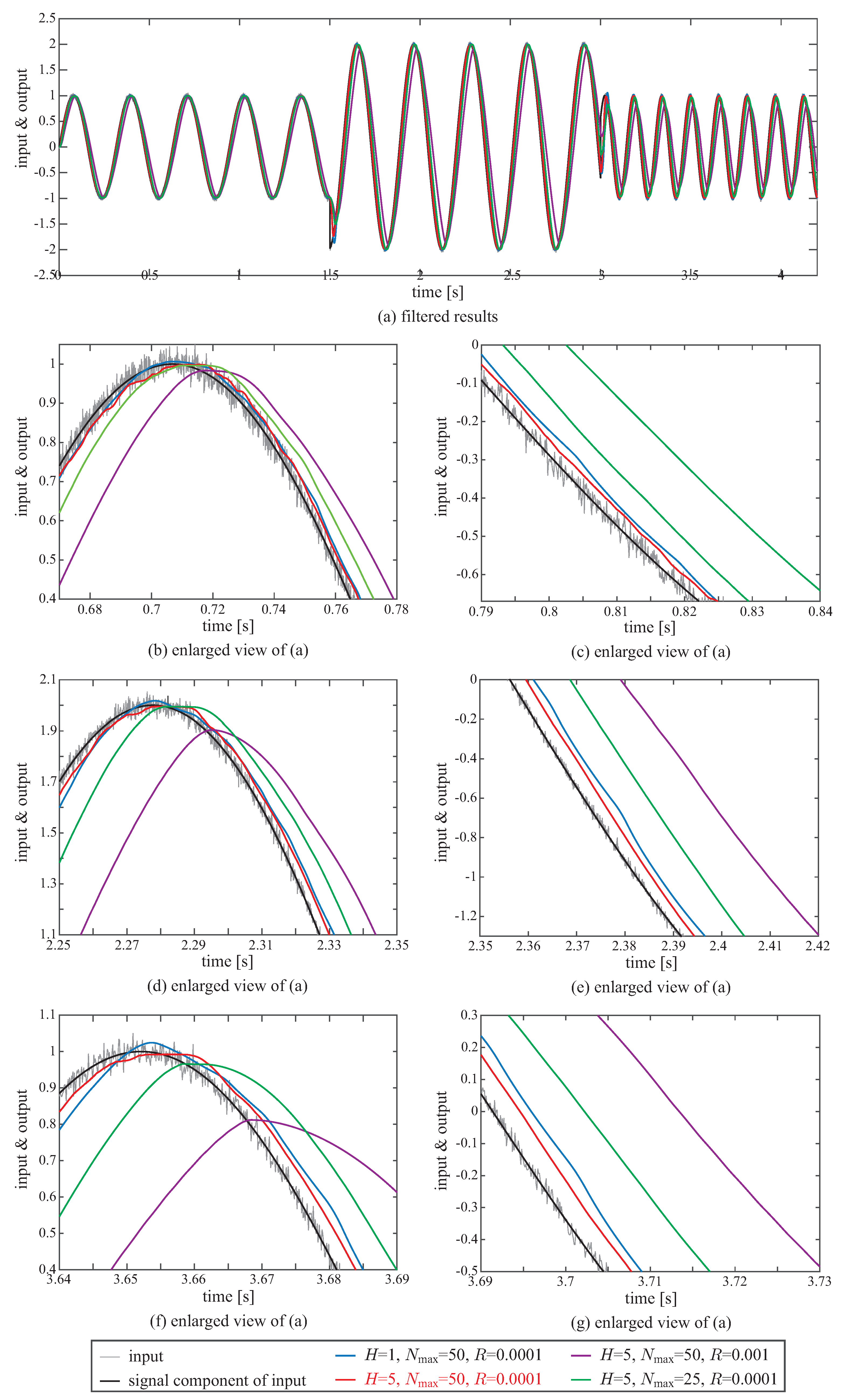
Figure 13 shows the output of AG-PSMF under the parameter values recommended by the guidelines (hereafter denoted as the AG-PSMF Guideline). For comparison, the results of AG-PSMF with four different sets of parameter values are also included. The initial states of all conditions are set zeros at
s. The results clearly show the advantage of using
. That is, the AG-PSMF Guideline is less prone to overshooting than in the case of
. In addition, compared with the cases of
and
, the output amplitude of the AG-PSMF Guideline is closer to that of signal component of the input. Furthermore, the phase lag of the AG-PSMF-Guideline is the smallest among the four cases. As a whole, one can conclude that AG-PSMF performs the best under the recommended parameter values.
6. Conclusions
This paper has quantitatively evaluated the performance of an adaptive-gain parabolic sliding mode filter (AG-PSMF) for removing noise in feedback control of mechatronic systems, under different parameter values and noise intensities. The evaluation results show that, due to the nonlinearity, the performance of AG-PSMF varies widely under different conditions. Based on the evaluation results, the paper has provided practical tuning guidelines for AG-PSMF to optimize performance. The effectiveness of the guidelines is validated through numerical examples.
One issue that remains for future study is theoretical validation of AG-PSMF.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}